
广域差分GPS
1.OmniSTAR
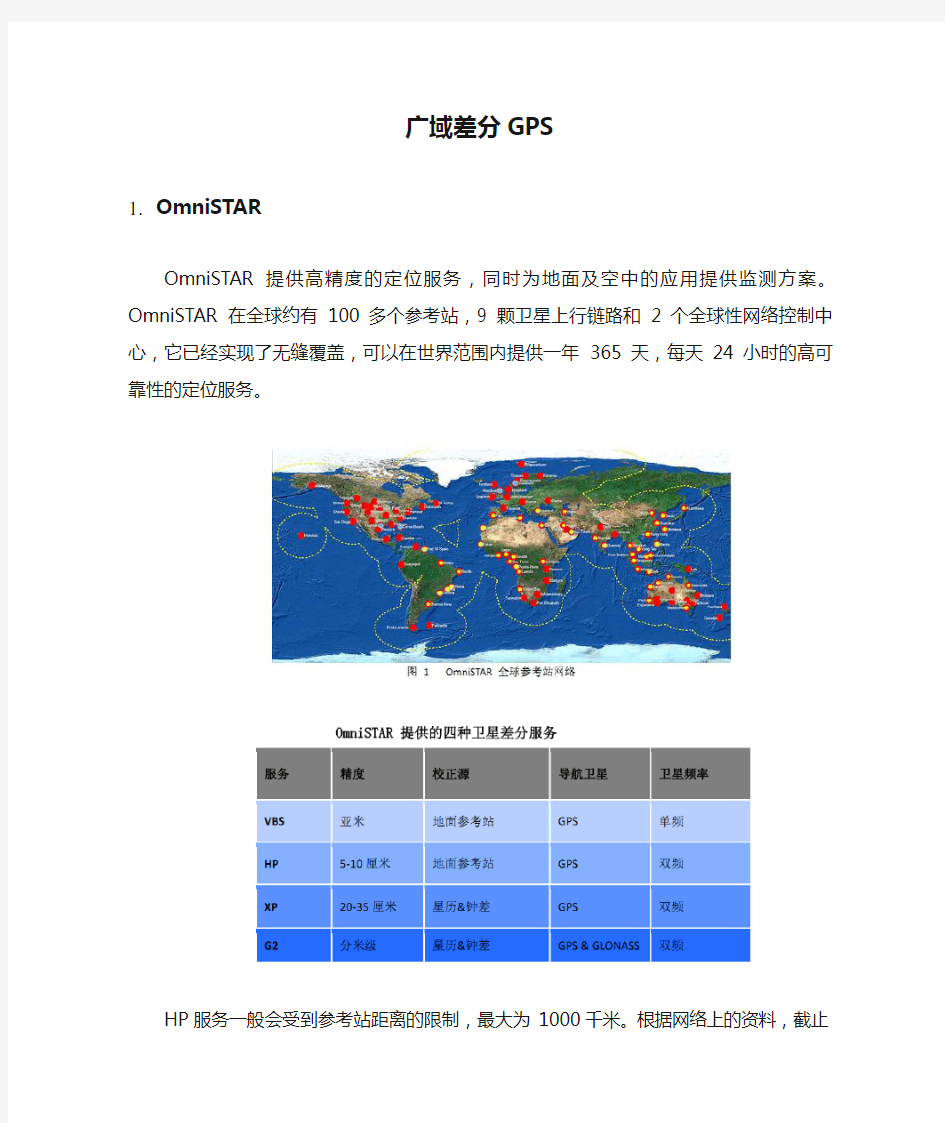
OmniSTAR 提供高精度的定位服务,同时为地面及空中的应用提供监测方案。OmniSTAR 在全球约有100 多个参考站,9 颗卫星上行链路和2个全球性网络控制中心,它已经实现了无缝覆盖,可以在世界范围内提供一年365 天,每天24 小时的高可靠性的定位服务。
HP服务一般会受到参考站距离的限制,最大为1000千米。根据网络上的资料,截止2007年,OmniSTAR在我国仅能实现东南部区域和渤海海域的HP服务覆盖,如下图所示:
图1-2 中国地区HP信号覆盖范围示意图
2.StarFire
StarFire?又称RTG(Real Time GIPSY)技术,它是世界上第一个可以提供单机实时厘米级定位精度的星基增强差分系统,是由美国航空航天局下属的喷气动力实验室(JPL)和美国NA VCOM公司合推出的商业级高精度GPS差分系统。
图2-1 StarFire卫星覆盖示意图
StarFire?是一个发送全球DGPS改正数的系统,可以在世界任何地方提供精确定位,定位精度优于10cm。DGPS改正数通过INMARSAT地球同步卫星进行广播,用户不需要本地参考站和后处理就可得到很高的精度。更进一步说,在南北纬76o的海洋或陆地都可以得到同样高的定位精度,这是由于卫星已经覆
盖了全球范围。
2.1系统组成
星基增强系统包括地面参考站,数据处理中心,数据注入站,通信卫星,高精度接收机五部分,充分利用GPS卫星系统、L波段通讯卫星系统和Internet技术。
图2-2 系统组成原理图
1)地面参考站
为了提供全球的高精度定位服务,建立了一套基于双频接收机的全球参考站网络,不断的接收来自GPS卫星的信号。目前遍布全球的参考站已达80多个,并在中国黑龙江的佳木斯建立国内首个参考站。
2)数据处理中心
全球有两个数据处理中心,参考站数据通过Internet网络传输到数据处理中心,处理中心生成差分改正数。
3)注入站
处理中心提供的改正数,通过数据注入站,上传到通信卫星上。全球注入站也由最初的3个增加至6个。
4)通信卫星
通信卫星通过L 波段播发改正数据。
5)高精度接收机
高精度接收机同时接收GPS 卫星和通信卫星信号,充分融合GPS 数据和GPS 改正数据,提供出高精度位置数据。
2.2 数据传递流程
接收机由两部分组成,一部分是双频GNSS 接收机,另一部分是L 波段通信接收器,双频GNSS 接收机跟踪所有可见卫星,获得测量值。同时,L 波段接收器接受星站差分系统广播的L 波段卫星改正数据。当这些改正数据应用在GPS 测量中,就可以得到实时高精度定位数据。
图2-3 数据传递流程
2.3 系统可靠性
整个系统的可靠率达99.99%,系统所有部分都有一个内置的备份系统。 所有的参考站都使用双频GPS 接收机,可以自动打开和响应处理中心的远程控制信号。参考站采集的数据通过Internet 网络来连接作为初始数据,并且通过通讯线路进行备份。
系统具备两个处理中心,彼此定位,不间断运行,每一个都能接收所有参考
站的信息,并且每一个都有多余的通讯链路。地面站配备两个连续运行的上联设备,专为由于开关自动失效而准备。同时有一支技术全面的支持团队,日夜维持整个系统的监控和控制。
第四章GPS定位原理 GPS绝对定位(单点定位、伪距定位) 静态绝对定位 动态绝对定位 GPS相对定位(差分定位?) 静态相对定位 动态相对定位 第一节 GPS绝对定位 GPS绝对定位:是一个用户利用GPS接收机,以地球质心为参考点,对卫星信号进行接收和观测,确定接收机天线在WGS-84坐标系中的绝对位置,又称单点定位或伪距定位。 GPS绝对定位基本原理: 以GPS卫星和用户接收机天线之间的距离观测量为基准,根据已知的卫星瞬时坐标,来确定用户接收天线所对应的位置。 现令 : (X j Y j Z j) 为卫星 j 的已知坐标, j = 1,2 …n。 2、绝对定位的精度评价: (1)平面位置精度因子HDOP (2)高程精度因子VDOP (3)空间位置精度因子PDOP (4)几何精度因子GDOP (5)接收机钟差精度因子TDOP 注: 1)DOP值∝ 1/V , V为星站六面体的体积。 2)亦要考虑大气传播误差的影响。 第二节 GPS相对定位 GPS相对定位:是利用两台或两台以上GPS接收机分别安置在不同的GPS点上,并同步观测相同的GPS卫星,将所获得观测值按一定的方法进行差分处理,消除一些误差对各观测值影响的相关部分,然后再进行解算,可以获得GPS点间的相对位置或基线向量。 GPS相对定位数学模型 载波相位测量的观测方程:
1、一次差分观测值: 1) .站际一次差分观测 ※其消除了与卫星有关的误差(星钟误差等)影响,削弱了大气传播误差(电离层和对流层折射误差)影响。 2).星际一次差分观测 ※其消除了与接收机有关的误差(机钟误差等)影响,削弱了大气传播误差(电离层和对流层折射误差) 的影响。
基于虚拟参考站的同步三星时差定位系统广域差分校正算法 任凯强* 孙正波 (盲信号处理重点实验室 成都 610041) 摘 要:星历误差是导致同步三星时差定位系统定位误差的主要因素,该文针对传统差分校正算法在远离参考站区域对星历误差校正精度差的问题,提出一种基于虚拟参考站(VRS)的广域差分校正算法。首先证明两参考信号时差的差分残差近似为两参考站连线方向的线性函数;然后利用已有参考站的位置信息和参考信号的时差观测值,在目标辐射源位置处通过线性拟合构造一个VRS ;最后将目标辐射源与VRS 的时差观测值进行差分,从而实现对星历误差的高精度校正。仿真结果表明,相比传统差分校正算法,该方法可大范围消除星历误差对同步三星时差定位系统定位精度的影响,且定位精度可逼近CRLB 。 关键词:同步三星时差定位系统;星历误差;差分校正;虚拟参考站中图分类号:TN91文献标识码:A 文章编号:1009-5896(2019)02-0433-07 DOI : 10.11999/JEIT180289 Wide Area Difference Calibration Algorithm Based on Virtual Reference Station for Tri-satellite TDOA Geolocation System REN Kaiqiang SUN Zhengbo (Science and Technology on Blind Signal Processing Laboratory , Chengdu 610041, China ) Abstract : A wide area difference calibration algorithm based on Virtual Reference Station (VRS) for tri-satellite Time Difference Of Arrival (TDOA) geolocation system is proposed to solve the problem that traditional difference calibration algorithm can not eliminate the location error caused by ephemeris error completely,especially when the emitter source is far away from the calibration station. Firstly, TDOA measurements of the VRS, which is in the vicinity of emitter source, is estimated by using TDOA measurements of reference station.Then, in order to remove the effect of ephemeris error and synchronization error on location error, TDOA measurements of the VRS is subtracted from that of emitter source. Simulation results demonstrate that the proposed algorithm can almost eliminate the effect of ephemeris error on location error of tri-satellite TDOA geolocation system in wide area. Key words : Tri-satellite Time Difference Of Arrival (TDOA) geolocation system; Ephemeris error; Difference Calibration (DC); Virtual reference station 1 引言 同步三星时差定位系统采用位于赤道上空的3颗同步卫星被动接收地球表面目标辐射的信号,利用信号到达3颗卫星的到达时间差(Time Differ-ence Of Arrival, TDOA)确定目标辐射源的位置,其具有隐蔽性强、覆盖范围广、对卫星姿态要求较低等优点,是无源定位领域的研究热点[1–4]。 在实际定位系统中,星历误差和时间同步误差的存在使得同步三星时差定位系统的定位精度大幅降低[5–10],因此文献[11–15]提出可引入已知位置的参考站来消除定位系统中星历误差和时间同步误差对定位精度的影响,称该类算法为有源校正算法。目前有源校正算法主要有两种思路,一种思路是采用参数估计的方法将星历误差和时间同步误差作为未知参数进行估计,这种思路的优点是理论精度高,校正后定位精度可以达到克拉美罗界(Cramer-Rao Lower Bound, CRLB),缺点是待估计参数多,计算量较大,在参考站数目较少或参考站信号时差测量精度较低时性能较差或无法工作;第2种 收稿日期:2018-03-20;改回日期:2018-11-12;网络出版:2018-11-19*通信作者: 任凯强 rkq308597871@https://www.doczj.com/doc/498458207.html, 基金项目:国家自然科学基金(61304264) Foundation Item: The National Natural Science Foundation of China (61304264) 第41卷第2期电 子 与 信 息 学 报 Vol. 41No. 22019年2月Journal of Electronics & Information Technology Feb. 2019 万方数据
一、差分定位 对差分GPS技术的介绍主要分为一下三个方面:1:差分系统的种类;2:差分校正量的产生;3:几种实际的差分系统。 差分GPS的核心思想: 差分GPS系统包括一个或多个安装在已知位置点上的GPS接收机作为基准站接收机,通过基准站接收机对GPS卫星信号的测量而计算出差分校正量,然后将差分校正量播发给位于差分服务范围内的用户接收机,以提高用户接收机的定位精度。尽管差分系统都是基于这样一个相同的思路,但是他们仍可能具有各自不同的运行环境,操作方式和服务性能。 1,根据系统所服务的地理方位来分,差分GPS通常分为局域,区域和广域三大类,他们拥有不同长度的基线距离。 关于基线的讨论: 考虑到差分系统的出发点主要在于消除卫星时钟,卫星星历,电离层延时和对流层延时误差,我们可以这样理解所谓的基线长短:如果这些误差量经差分校正后的残余要小于多路径和接收机噪声,那么这些误差成分在用户与基准站处的空间相关性较高,此时的基线称为短基线,否则称为长基线。显然,基线的长短与否还要看电离层和对流层的稳定度等情况。由于,对流层延时的局部性较强,因而,在用户与基准站两端最好利用对流层延时模型等方法对各自的测量值分别同时进行对流层延时误差校正,使对流层延时不再成为差分校正量的一部分,从而让差分系统容忍更长的基线距离 2,根据差分校正的目标参量不同,差分GPS主要分为位置差分,伪距差分,载波相位平滑后的伪距差分以及载波相位差分四种。 (1)位置差分:
位置差分系统认为基准站接收机的定位误差与用户接收机的定位误差相关,于是它将基准站接收机的定位值与经精密测绘得到的真实值之差作为差分校正量并将之播发出去,用以对用户接收机进行直接校正。 虽然位置差分的思路相当简单,但是他有一个严重缺陷:为了让处于不同位置的基准站接收机与用户接收机更大程度的拥有一个相同的定位结果误差,这两个接收机必须至少采用同一种定位算法和同一套卫星测量值组合,而在这实际操作中会遇到很多困难。 具体说来,一方面,基准站接收机和所有利用差分服务的用户接收机不但应当采用例如前面介绍过的最小二乘算法或者kalman滤波等同一种定位算法,而且算法中的各个参数值也必须尽量一致。另一方面,不管在基准站与在各个用户处的卫星可见情况是否相同,所有用户接收机的定位算法必须与基准站接收机的定位算法选用数目和PRN号完全相同的一套卫星测量值,而其中的一种解决方案是让基准站播发对应着所有各种不同可见卫星组合的位置差分校正量。所以,利用位置差分没有那么简单。 (2)其他差分 与差分校正量在定位领域内位置差分不同,其他三种差分量则均在测距领域内。由于载波相位测量值的精度比伪距测量值的精度高出几个数量级,因而基于载波相位的差分系统通常具有更高的定位精度,可以用来实现精密定位。除了高精度之外,载波相位测量值的另一个主要特点是其所包含着整周模糊度,而事实上,我们可以发现,利用载波相位测量值实现精密定位的根本任务正是求解出载波相位测量值中的整周模糊度。载波相位平滑后的伪距他的特点是没有整周模糊度,其精度介于伪距与载波相位之间。一般来说,基于伪距的差分系统可以获得分米级的定位精度,而基于载波相位的差分系统的定位精度能达到毫米。3,利用用户接收机的定位结果形式来分,差分GPS定位可以分为绝对定位和相对定位两种。 在绝对定位中,基准站接收天线的位置坐标需要被实现精确地确定,而利用差分服务的用户接收机可以求解出天线位置在同一坐标系统中的定位值。
广域差分GPS 1.OmniSTAR OmniSTAR 提供高精度的定位服务,同时为地面及空中的应用提供监测方案。OmniSTAR 在全球约有100 多个参考站,9 颗卫星上行链路和2个全球性网络控制中心,它已经实现了无缝覆盖,可以在世界范围内提供一年365 天,每天24 小时的高可靠性的定位服务。 HP服务一般会受到参考站距离的限制,最大为1000千米。根据网络上的资料,截止2007年,OmniSTAR在我国仅能实现东南部区域和渤海海域的HP服务覆盖,如下图所示:
图1-2 中国地区HP信号覆盖范围示意图 2.StarFire StarFire?又称RTG(Real Time GIPSY)技术,它是世界上第一个可以提供单机实时厘米级定位精度的星基增强差分系统,是由美国航空航天局下属的喷气动力实验室(JPL)和美国NA VCOM公司合推出的商业级高精度GPS差分系统。 图2-1 StarFire卫星覆盖示意图 StarFire?是一个发送全球DGPS改正数的系统,可以在世界任何地方提供精确定位,定位精度优于10cm。DGPS改正数通过INMARSAT地球同步卫星进行广播,用户不需要本地参考站和后处理就可得到很高的精度。更进一步说,在南北纬76o的海洋或陆地都可以得到同样高的定位精度,这是由于卫星已经覆
盖了全球范围。 2.1系统组成 星基增强系统包括地面参考站,数据处理中心,数据注入站,通信卫星,高精度接收机五部分,充分利用GPS卫星系统、L波段通讯卫星系统和Internet技术。 图2-2 系统组成原理图 1)地面参考站 为了提供全球的高精度定位服务,建立了一套基于双频接收机的全球参考站网络,不断的接收来自GPS卫星的信号。目前遍布全球的参考站已达80多个,并在中国黑龙江的佳木斯建立国内首个参考站。 2)数据处理中心 全球有两个数据处理中心,参考站数据通过Internet网络传输到数据处理中心,处理中心生成差分改正数。 3)注入站 处理中心提供的改正数,通过数据注入站,上传到通信卫星上。全球注入站也由最初的3个增加至6个。 4)通信卫星
SBAS 即Space Based Augmentation System,是利用地球静止轨道卫星建立的地区性广域差分增强系统。 目前全球发展的SBAS系统有: 欧空局接收卫星导航系统(EGNOS),欧洲大陆 美国雷声公司的广域增强系统(W AAS),美洲大陆 日本的多功能卫星增强系统(MSAS),亚洲大陆 三者具有完全兼容的互操作性。 其特点是: 1、通过地球静止卫星(GEO)发布包括GPS卫星星历误差改正、卫星钟差改正和电离层改的信息; 2、通过GEO卫星发播GPS和GEO卫星完整的数据; 3、GEO卫星的导航载荷发射GPS L1测距信号。 SBAS覆盖图 WAAS 这个名词、全名为Wide Area Augmentation System,即广域增强系统。WAAS是美国联邦航空局(FAA)及美国交通部为提升飞行精确度而发展出来的,因为目前单独使用GPS 并无法达到联邦航空局针对精确飞行导航所设定的要求。WAAS 包含了约25个地面参考站台,位置散布于美国境内,负责监控GPS 卫星的资料。其中两个分别位于美国东西岸的主站台搜集其它站台传来的资料,并据此计算出GPS 卫星的轨道偏移量、电子钟误差,以及由大气层及电离层所造成的讯息延迟时间,汇整后经由两颗位在赤道上空之同步卫星的其中之一传播出去。此W AAS 讯号的发送频率与GPS 讯号的频率相同,因此任何具备WAAS 功能的GPS 机台都可接收此讯号,并藉此修正定位信息。WAAS 可以校正由电离层干扰、时序控制不正确以及卫星轨道错误等因素所造成的GPS 讯号误差,也能提供各卫星是否正常运转之信息。虽然W AAS 目前尚未正式通过美国航空局的飞行使用认证,但此系统已开放给一般民众使用,例如从事航海或其它休闲活动的人们。 W AAS提供校正GPS讯号的功能,让您得到更精确的定位。到底能提升多少精确度呢?官方给出的数据是,可以平均提升最多五倍的精确度!目前无W AAS功能的普通GPS接收机的正常精确度是15米,而一台具备W AAS功能的GPS接收机能在95%的情况下提供您误差小于三公尺的精准定位,而且您不必为了使用WAAS功能而支付任何使用费。 美国的W AAS这么强,欧洲人也没有闲着,欧洲正在一步步的部署计划中的“欧洲全球导航卫星系统”即GNSS。提到GNSS,就涉及到两个方面:一是美国的GPS体系;另一个就是俄罗斯的GLONASS体系。导航卫星系统除美国的GPS卫星系统外,能与其比拟的就
第22卷 第2期1998年4月 武汉交通科技大学学报 Journal of Wuhan T ransportation University Vol.22 No.2Apr il 1998 GPS 实时差分动态定位技术 a 甘俊英 张有为 (广东省五邑大学信息科学研究所 江门 529020) 摘要:全球定位系统GPS 是一个实时、全天候和全球性的星基导航定位系统.分析了全球定位系统GPS 的组成及功能,探讨了GPS 实时差分动态定位技术及其误差来源.GPS 实时差分动态定位这一高新技术必将进入社会生活的各个方面,为全社会提供服务.关键词:全球定位系统;差分动态定位;动态定位;实时定位技术中图法分类号:T N967.2 1 GPS 的组成 CPS(Global Positioning System)为全球定位系统,主要由GPS 卫星、地面监控系统和用户设备三部分组成. 全球定位的空间卫星由21颗工作卫星和3颗备用卫星组成.工作卫星分布在6个轨道面内,每个轨道面分布3~4颗卫星.卫星轨道面相对地球赤道面的倾角为55°,各轨道面升交点的赤径相差60°,在相邻轨道面上,卫星的升交距相差30°.轨道平均高度约为20200km,卫星运行周期为11h 58min.因此,在同一测站上每天出现的卫星分布图相同,只是每天提前约4min .每颗卫星每天约有5h 在地面线上,同时位于地平线上的卫星数目随时间和地点而异,最少为4颗,最多为11颗.这样的空间配置,可保证在地球上任何时间、任何地点均至少可以同时观测到4颗卫星,加之卫星信号的传播和接收不受天气的影响,因此,GPS 是一种全球性、全天候的连续实时导航系统. GPS 地面监控部分是由5个监控站、 3个注入站和一个基准站组成.基准站位于美国科罗拉多?斯平士(Colorado Spr ings)的联合空间执行中心(Consolidated Space Oper ation Center ),三个注入站分别设在大西洋、印度洋和太平洋的3个美国军事基地,即大西洋的阿森松(Ascension)岛、印度洋的狄哥?伽西亚(Diego Garcia )和太平洋的卡瓦加兰(Kwajalein),5个监控站除了位于基准站和3个注入站之外的4个站以外,还在夏 威夷设立了一个监控站,监控站为数据自动采集中心,配有双频GPS 接收机、高精度原子钟、环境数据传感器和大型计算设备,为基准站提供各种观测数据.基准站为系统管理和数据处理中心,其主要任务是利用本站及各监控站的观测数据推算各卫星的星历、卫星钟差和大气延迟修正参数,提供全球定位系统时间基准,并将这些数据传到注入站,调整偏离轨道的卫星,使之沿预定的轨道运行,启用备用卫星以代替失效的工作卫星.注入站将基准站推算和编制的卫星星历、钟差、导航电文和其他控制指令等注入相应卫星的存储系统,并监控注入信息的正确性. 用户部分包括GPS 接收机、天线、计算机及其处理软件.按照GPS 信号的不同用途,GPS 信号接收机可分成3大类:导航型、测地型和守时型.按照GPS 信号的应用场合,可以分为袖珍型、背负式、车载式、船用式、机载式、弹载式和星载式等7种类型.天线一般采用全向振子天线、小型螺旋天线和微带天线.微带天线将成为GPS 信号接收机的主要发展方向.GPS 信号接收机通过RS -232接口与PC 机进行实时通信,经常采用的是Visual Basic 4.0.因为该软件有专门的通信应用设计为MSCOMM.V BX 控件,编写通信程序显得很容易. 2 GPS 的实时差分动态定位技术 2.1 GPS 的实时差分动态定位原理 GPS 实时定位要求观测和数据处理在定位 a 收稿日期 甘俊英:女,
Realization of Wide Area Differential Augmentation System and Integrity Monitoring By the Regional Satellite Navigation System C ao Yueling1,Zhou Shanshi1,Hu Xiaogong1,Wu Bin1 1.Shanghai Astronomical Observatory,Chinese Academy of Sciences,Shanghai,200030 1.caoyueling@https://www.doczj.com/doc/498458207.html, Abstract:Though many basic corrections have been considered,like Antenna phase center error,broadcast ephemeris clock error,atmospheric correction,relativistic correction, tidal correction,the pseudorange observation for Real-time positioning users is still affected by residual errors like satellite and receiver clock error,broadcast ephemeris error, multi-path effect etc.Especially for single frequency receiving users,the effect of Ionospheric delay is even larger. Augmentation Service of Wide Area Differential System for Regional Satellite Navigation System offers the capabilities of main part residual errors simulating which will perform the calculation of Grid Ionospheric delay and equivalent satellite clock error,and increase the positioning precision of the system users.Also the system provide the precision level of these differential corrections,offering integrity information and warning when the system is unavailable or precision level is decreasing.The service is similar to WASS system for GPS,The differences of the two systems is that the former system wouldn't separate the orbital errors and satellite clock errors,it would offer the satellite related errors together in the form of equivalent satellite clock error.This Algorithm is convenient to achieve and reduce the burden of data processing. In this paper,the algorithms of Wide Area Differential Augmentation System and Integrity for Regional Satellite Navigation System were discussed in detail,the differential corrections and integrity information were calculated according to the present constellation and station distribution,the results was analyzed. Keywords:Satellite Clock Error,Grid Ionosperic Delay,UDRE,RURA,GIVE 区域卫星导航系统的广域差分增强服务及完好性 曹月玲1,周善石1,胡小工1,吴斌1 1.中国科学院上海天文台,上海,200030 1.caoyueling@https://www.doczj.com/doc/498458207.html, 【摘要】实时定位用户伪距观测数据在进行天线相位中心改正、广播星历钟差改正、大气改正、相对论改正、潮汐改正等公共误差改正基础上,仍受剩余误差的影响,如卫星钟差、接收机钟差、广播星历误差、多路径影响误差等,尤其对单频接收机用户,受电离层延迟误差影响严重。区域卫星导航系统的广域差分增强服务,对这些剩余误差的主要部分进行模拟,提供电离层延迟格网改正数和卫星等效钟差改正数,以提高系统用户的实时定位精度。同时监测差分改正精度,提供完好性信息,当系统不可用或精度降低时,能够及时向用户告警。该广域差分增强服务与GPS的WAAS系统类似,区别是不对轨道误差和卫星钟差进行分离,而将与卫星相关的误差统一给出,用卫星等效钟差改正表示。其算法简便易行,大大减小数据处理负担。本文首先对区域卫星导航系统广域差分改正及完好性信息的算法进行了详细的论述,计算了差分改正值及完好性信息,并依据目前的星座组成及有限的区域监测站分布,对计算结果所能实现的精度进行了定量分析。 【关键词】卫星等效钟差,格网电离层延迟,UDRE,RURA,GIVE
北斗卫星导航系统伪距差分定位技术的分析 文章介绍了北斗卫星导航系统(BDS)的伪距差分定位模型。结合GPS的伪距差分定位模型对该模型进行了比较,并对北斗导航系统的整体情况进行了介绍和概述,对比计算基线结果的精度,结果表明北斗导航系统的伪距差分可以达到亚米级的精度,对BDS地基的加固施工提供了新方向;同时还讨论了BDS卫星可见数对伪距差分定位的影响,对以后的工作提供指导借鉴。 标签:北斗卫星导航系统;伪距差分定位;定位技术 Abstract:This paper introduces the pseudo-range differential positioning model of BeiDou satellite navigation system (BDS). Based on the pseudo-range differential positioning model of GPS,the model is compared,the overall situation of BeiDou navigation system is introduced and summarized,and the accuracy of baseline results is compared. The results show that the pseudo-range difference of the BeiDou navigation system can reach the accuracy of sub-meter level,which provides a new direction for the construction of BDS foundation reinforcement,and the influence of the visible number of BDS satellites on the pseudo-range differential positioning is also discussed. Keywords:BeiDou satellite navigation system (BDS);pseudo range differential positioning;positioning technology 1 概述 BDS即指北斗衛星导航系统,该系统是世界四大导航定位系统之一,同时还有美国GPS,俄罗斯GLONASS和欧盟伽利略系统。北斗卫星导航系统的发展非常迅速,到2012年完成了为亚太地区大部分地区提供定位、导航和短文通信服务功能服务,具有特色的短消息通信功能的特点。 现在,国内许多省市都积极推进北斗基础强化体系统的建设,以迎合相关行业和公众用户对亚米级和米级定位的增长需求。但目前的研究重点主要集中在利用载波进行精确计算,这需要计算整周的未知数,并且观测值的周跳数的影响有很多因素。对于精度要求不高、需要实时定位或快速定位的要求,GPS伪距差分定位早已可以达到此要求。本文研究了BDS伪距差分定位,探讨了BDS和GPS 时间系统分析与坐标系统的区别,和其对伪距差分定位的影响,两基线分别使用BDS和GPS来分析计算伪距差分,以此对比BDS和GPS伪距差异结果的区别。 2 北斗导航系统的概述 2.1 北斗导航系统的特点 (1)定位精度:通过设计,北斗2号的导航系统的定位精度相近于GPS的
星站差分GPS定位技术介绍 杨怀春 随着对GPS定位精度要求的提高,一些地区特别是远离基站的海上、沙漠、大山等地区,一般的DGPS仪器差分信号已不能覆盖,定位精度也不能满足要求。而星站差分GPS 定位新技术(RTG) ,采用Inmarsat卫星数字通讯网传输广域差分改正信号比较好地解决了这一难题。文中阐述了星站差分GPS定位的工作原理与差分技术,介绍了仪器的部分性能指标 【作者单位】:胜利石油管理局地球物理勘探开发公司 引言 随着GPS的发展,伪距差分RTD(Real Time Dynamic)和载波相位差分RTK(Rea l Time kinematic)技术的出现,测量已由原来用经纬仪测角、测距放样物理点转向用RTK 或RTD方法直接放样物理点。 RTK和RTD技术采用无线电发射和接收,.建立数据链,将基站的GPS差分改正信号传给移动的GPS接收机。桂平市GPS RTK因设备体积和耗电大、抗干扰性差以及受无线电频率的限制等因素的影响,只能进行平面定位。定位精度为米级。GPS RIK用甚高频无线电接收和发射,虽然定位精度有所提高,但同样由于抗干扰性差,特别是作业距离有限,不能满足作业区域离基站越来越远的要求,这些不足.在海上石油物探或海上工程方面表现得尤为突出,StarFirc jt星站差分GPS既解决了定位精度问题,又解决了移动台与基站站之间的距离问题。 StarFirc jt星站差分网络在全球范围内提供GPS差分信号发布服务,它提供了独一无二的可靠性和空前的精度,优于10cm (min),StarFirc jt DGPS改正信号通过Inmarsat静止卫星进行传播,无须建立当地的基准站或后处理,.该系统覆盖全世界,在北纬76°到南纬76°的任何地球表面,都能提供同样的精度,该项技术具有以下特点: (1)功单机作业,设备安装简便 (2)定位精度高,作业成果误差均匀: (3)集成度高;一台主机和一个集成天线就组成一套系统: (4)摆脱了传统GPS RTK对离岸作业距离的限制 StarFirc jt星站站差分GPS主要特点
文档类别文档编号 起草日期2014-07-30 密级无 入库日期入库定位信息服务器/研发管理郑州市加滋杰交通科技股份有限公司 GPS/北斗定位系统 使用说明书 版本:V1.1 起草:李光 审核: 校对: 批准: 版权所有:加滋杰交通科技股份有限公司 2014年07月30日
修订记录 序号版本说明 责任人 职责姓名日期 1 V1.0 初始版本起草李光2014.03.19 校对 审核 批准 2 V1.1起草李光2014.07.30校对 审核 批准 3 起草校对审核批准 4 起草校对审核批准 5 起草校对审核批准 6 起草校对审核批准 7 起草校对审核批准
目录 目录 (3) 双差分GPS/北斗定位系统使用说明书 (4) 一、概述 (4) 1.1系统特点 (4) 1.2系统配置 (4) 1.3技术指标 (4) 二、软硬件说明及安装 (5) 2.1硬件说明 (5) 2.2 软件说明 (8) 2.3 设备安装 (8) 三、数据协议及命令 (11) 3.1 GPS定位定向消息集 (11) 3.2 命令协议 (13) 四、注意事项 (16) 五、运输与储存 (16) 六、机械规格 (16)
双差分GPS/北斗定位系统 使用说明书 一、概述 GPS/北斗卫星定位系统具有全天候、高精度、自动化、高效益等特点,本系统内置双GNSS与里程计接口,GNSS系统支持北斗、GPS双系统;系统可采用双差分RTK算法,组合输出系统方位角,输出精度可达厘米级,更适用于交通测量、测绘、GIS采集、驾校考试系统等高精度高要求场合使用。 1.1系统特点 ◆精度高、无累积误差、兼容多种组合模式、保持时间长; ◆双GPS利用载波测量技术精确计算航向值,航向精度视两GPS间基 线长度而定,基线越长精度越高; ◆动态使用时,还有GPS轨迹角输出,尤其能为有人机、无人机、浮 空器等准确提供偏流角; ◆具备自寻北功能,在无GPS信号情况下仍可通过高精度惯导实现定 向测姿。 1.2系统配置 表1 系统配置 主机1台 GNSS测量天线2个 天线馈线2根 数据电源线缆1套(3根) 合格证1张 1.3技术指标
港口车辆精确定位管理解决方案 本文介绍北斗卫星差分定位技术来解决港口车辆高精度定位难题,包括工作原理、使用条件等。 一、背景 在全球经济一体化深入发展的今天,港口作为全球运输网络中的一个重要节点,是对外贸易进出口货物的集散中心,是国际物流供应链的重要环节和物流通道的枢纽,对区域经济的发展起着越来越重要的促进作用。但是随着港口继续向大型化、专业化的发展,呈现出专业化程度不高、基础设施设备不厚实的现状。自动化设备不多及物流设施设备标准化程度不高,对港口运输车辆精确定位迫切等问题已成为制约我国港口物流发展的瓶颈。 二、建设目标 为配合港口自身发展的需求,建立完善高效的集疏装卸系统,帮助港口精确了解作业车辆的位置,为统筹调度提供准确,快速的位置信息资料。 1、对港口作业车辆进行厘米级定位 2、对港口运输车辆的轨迹一目了然,各种异常行为实时报警 3、电子围栏,可以为每台在港口作业的车辆划定行驶范围,避免管理混乱 4、驾驶员不良行为驾驶行为后台实时报警,规范驾驶行为,降低作业风险 后台自动生成各种报表,如行车报表,超出围栏警戒报表,司机不良行为驾驶报表 三、解决方案 (一)北斗定位系统
依靠美国的GPS对中国的长远发展是存在巨大风险的,为此中国发展了自己的北斗卫星定位系统,用于抗衡美国的GPS。北斗卫星导航系统是我国自行研制开发的区域性有源三维卫星定位与通信系统,是除美国的GPS、俄罗斯的GLONASS之后第三个成熟的卫星导航系统。 在交通运输行业,我国9个示范省市的8万多辆旅游包车、大客车和危险品运输车辆都安装了北斗车载终端系统,利用北斗“火眼金睛”加强对交通运输安全的监管。在气象领域,中国气象局开展了“基于北斗导航卫星的大气、海洋和空间监测预警示范应用工程”,完成了北斗探空仪和探空系统的研发、生产任务,湖北、广东等省市北斗水汽电离层监测区域网已投入运行。初步验证表明,基于北斗的气象应用可大幅提升传统业务水平。 据悉,我国北斗车载导航终端技术已经成熟,导航型芯片模块定位精度、测速精度、可用性等关键性能指标已与国际同类产品相当,总体性能相当于美国SIRF的第二代、第三代芯片水平,已具备进入车辆、手持设备的条件,目前正向批量生产过渡。北斗车载的应用将逐步进入大众消费市场。 (二)、北斗—GPS高精度差分定位系统 北斗差分定位系统由一个主控站,GPS卫星,卫星接收基站,监控终端、北斗定位系统和用户端组成。如图: 由于GPS和北斗系统是不同的定位系统,GPS接收机不能直接接收差分信息,因此必须开发兼容的用户专用定位软件。 (三)、系统设计理念 1、经济性 由于模拟系统功能的局限性,许多港口需要采购多重系统进行搭配,每一种系统只能完成其单一的功能(如数传等),一线操作人员需要使用不同的终端进行操作,在给操作带来不便的同时,也导致了资金的重复投入。 高精度差分定位系统作为一个强大的综合系统,由各种不同软硬件系统和各种不同的应用功能模块组成。因此,整个系统除了具有完善的软件体系结构和标准的内部模块接口,还需要满足各种数据应用服务的灵活配置,提供不同类型信息查询、数据分析功能,并可以通过工作门户视图和权限管理设定不同角色视图,不仅可以给不同角色提供不同信息,也可以灵活方便的进行信息安全控制。降低系统成本,为企业持续发展提供效益最大化。 2、可靠性 干扰严重:由于港口的业务量非常大,信道数量相对较多,普遍存在电磁干扰现象,
差分北斗定位系统 “差分北斗”超越GPS 经过对试验数据进行分析,差分北斗卫星导航系统定位精度达到1米以内,其性能指标已领先全球定位系统(GPS)。 此外,差分北斗卫星导航系统还能兼容GPS信号,这就意味着安装差分北斗船载终端的船舶既可以单独使用北斗导航,也可以使用“北斗”和GPS“双模”导航。 据东海航海保障中心主任王鹤荀介绍,随着差分北斗卫星导航系统功能的不断完善,它的优势将逐步显现。预计在不久的将来,只要船舶安装了差分北斗导航终端,就可以安心利用该系统提供的免费高精度定位、导航服务。 广泛应用于海洋领域 据悉,差分北斗卫星导航系统可广泛应用于海洋测绘、港口航道测量、航道疏浚、船舶进出港及狭窄水道导航定位、海上交通安全管理、海上石油勘探、海洋资源调查、海上救助捕捞、海洋渔业及其他海上领域。 以长江口为例,长江口水域船舶流量大、船型多样、航道复杂,船舶定位精准程度直接影响着航行安全。如果船舶配备了高精度的差分北斗船载终端,将有效降低船舶发生碰撞的概率,更大限度保障船舶航行安全。 “差分北斗”超越GPS 经过对试验数据进行分析,差分北斗卫星导航系统定位精度达到1米以内,其性能指标已领先全球定位系统(GPS)。 此外,差分北斗卫星导航系统还能兼容GPS信号,这就意味着安装差分北斗船载终端的船舶既可以单独使用北斗导航,也可以使用“北斗”和GPS“双模”导航。(更多:https://www.doczj.com/doc/498458207.html,/news/20130322/1736.html) 据东海航海保障中心主任王鹤荀介绍,随着差分北斗卫星导航系统功能的不断完善,它的优势将逐步显现。预计在不久的将来,只要船舶安装了差分北斗导航终端,就可以安心利用该系统提供的免费高精度定位、导航服务。 广泛应用于海洋领域 据悉,差分北斗卫星导航系统可广泛应用于海洋测绘、港口航道测量、航道