Harbin Institute of Technology
机械原理大作业一
课程名称:机械原理
设计题目:齿轮传动机构设计
院系:
班级:
设计者:
学号:
指导教师:
设计时间: 2013/05/29
1、设计题目
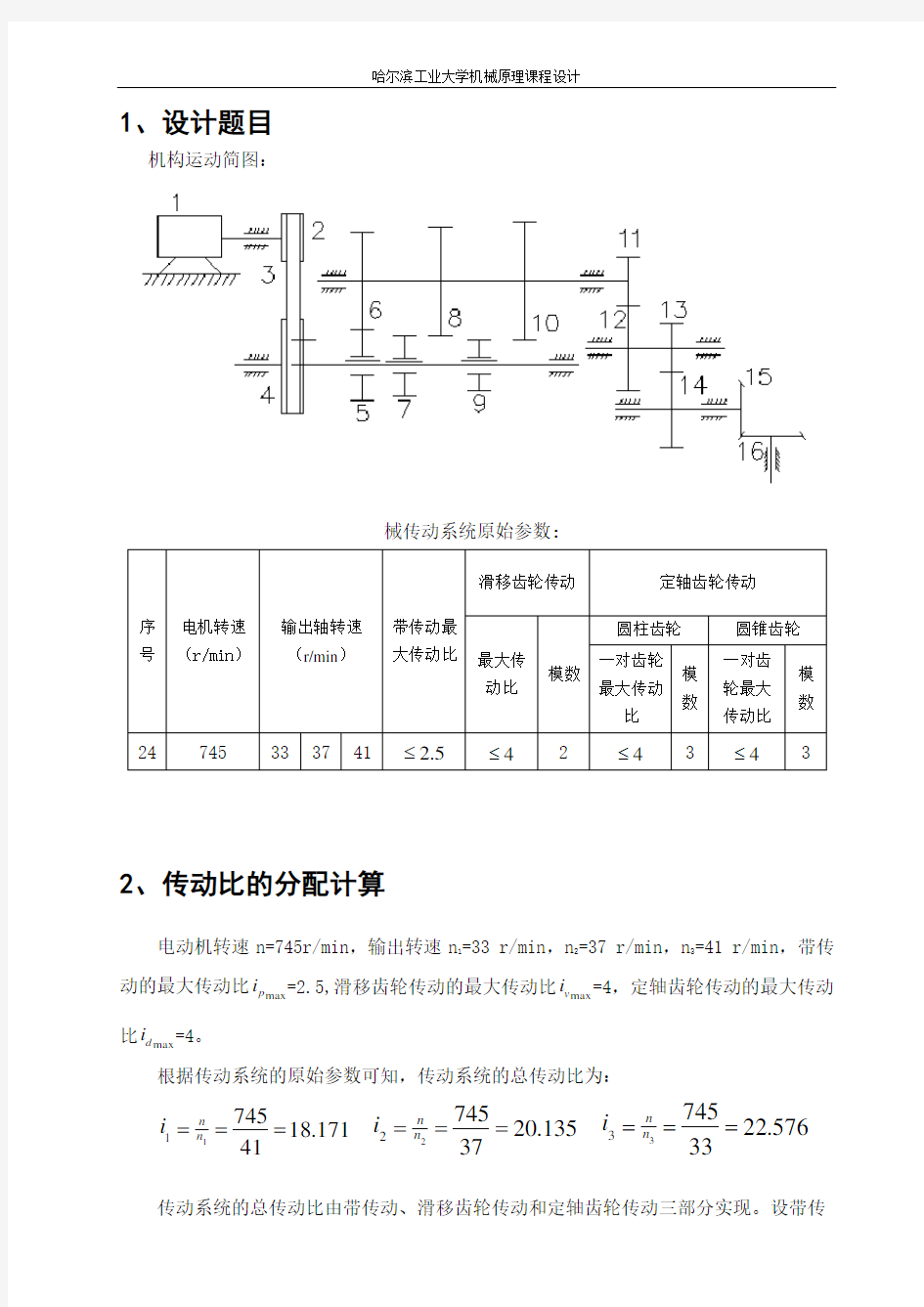
机构运动简图:
械传动系统原始参数:
序
号 电机转速
(r/min )
输出轴转速(r/min )
带传动最
大传动比 滑移齿轮传动
定轴齿轮传动 最大传
动比
模数
圆柱齿轮 圆锥齿轮 一对齿轮最大传动比
模数
一对齿轮最大传动比
模数
24 745 33 37 41 5.2≤ 4≤ 2 4≤ 3 4≤ 3
2、传动比的分配计算
电动机转速n=745r/min ,输出转速n 1=33 r/min ,n 2=37 r/min ,n 3=41 r/min ,带传动的最大传动比max p i =2.5,滑移齿轮传动的最大传动比max v i =4,定轴齿轮传动的最大传动比max d i =4。
根据传动系统的原始参数可知,传动系统的总传动比为:
171.1841
7451
1===
n n i 135.2037
7452
2===n n i 576.2233
7453
3===n n i
传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传
61
,15,60,17,58,181098765======z z z z z z 1
*
=a
h 动的传动比为5.2max =p i ,滑移齿轮的传动比为321,v v v i i i 和,定轴齿轮传动的传动比为f i ,则总传动比:
f
v p i i i i 1max 1
= f
v p i i i i 2max 2
= f v p i i i i 3max 3
=
令:
4max 3
==v v i i
则可得定轴齿轮传动部分的传动比: 258.24
5.2576
.22max max 3=?==
v p f i i i i
滑移齿轮传动的传动比: 219.3258.25.2171
.18max 11=?=
=
f
p v i i i i
567.3258
.25.2135
.20max 22=?=
=
f
p v i i i i
定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 4312.1258.2max 33=≤===d f d i i i
3、齿轮齿数的确定
根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9
角度变位齿轮,其齿数:它们的齿顶高系数径向间隙系数25.0*=c ,分和10为
度圆压力角α=20°,实际中心距77'
=a 。
根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:
21
,16,21,1614131211====z z z z 。它们的齿顶高系数*a h =1,径
向间隙系数*c =0.25,分度圆压力角α=20°,实际中心距56'
=a mm 。圆锤齿轮15和16选
择为标准齿轮
25
,192515==z z ,齿顶高系数*a h =1,径向间隙系数*c =0.2,分度圆压力角
α=20°(等于啮合角'α)。
4、滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算
表1 滑移齿轮5、6参数
序号 项目
代号 计算公式及计算结果
1 齿数
齿轮5 Z 5 18 齿轮6
Z 6
58 2 模数 m 2 3 压力角 α
200 4 齿顶高系数 *a
h 1 5 顶隙系数 *c
0.25
6 标准中心距 a
76)(21
65=+=
z z m a 7 实际中心距 'a
'a =77
8
啮合角
'α
''arccos(cos )a a
αα==21.950
9
变位系数
齿轮5
5x 5x =0.508
齿轮6
6x
6x =0.342
10 齿顶高 齿轮5 5a h
016.3)(5*
5=+=x h m h a a
齿轮6 6a h
684.2)(6*6=+=x h m h a a 11
齿根高
齿轮5
5f h
484.1)(5**5=-+=x c h m h a f 齿轮6 6f h
816.1)(6**6=-+=x c h m h a f
12
分度圆直径
齿轮5
5d
3655==mz d 齿轮6 6d
11666==mz d 13
齿顶圆直径
齿轮5
5a d
032.422555=+=a a h d d 齿轮6
6a d
368.1212666=+=a a h d d
14
齿根圆直径
齿轮5 5f d
032.332555=-=f f h d d
15
齿顶圆压力
角
齿轮5 5a α
o a b a d d 405.36)/arccos(555==α
齿轮6
6a α
o a b a d d 087.26)/arccos(666==α
16 重合度
ε
7573.1)]tan (tan )tan (tan [21
'66'55=-+-ααααπ
a a z z
表2 滑移齿轮7、8参数
序号 项目
代号 计算公式及计算结果
1 齿数
齿轮7 Z 7 17 齿轮8
Z 8
60 2 模数 m
2 3 压力角 α
200 4 齿顶高系数 *a
h 1 5 顶隙系数 *c
0.25
6 标准中心距 a
77)(21
87=+=
z z m a 7 实际中心距 'a
'a =77
8
啮合角
'α
''arccos(cos )a a
αα==200
9
变位系数
齿轮7
7x 7x =0
齿轮8 8x
8x =0
10
齿顶高
齿轮7
7a h
2)(7*
7=+=x h m h a a 齿轮8 8a h
2)(8*8=+=x h m h a a 11
齿根高
齿轮7
7f h
5.2)(7**7=-+=x c h m h a f
齿轮8 8f h
5.2)(8**8=-+=x c h m h a f
12
分度圆直径
齿轮7
7d
3477==mz d 齿轮8
8d
12088==mz d 13
齿顶圆直径
齿轮7 7a d
382777=+=a a h d d
14
齿根圆直径
齿轮7
7f d
292777=-=f f h d d 齿轮8 8f d
1152888=-=f f h d d
15
齿顶圆压力
角
齿轮7 7a α
o a b a d d 778.32)/arccos(777==α
齿轮8
8a α
o a b a d d 581.24)/arccos(888==α
16 重合度
ε
6499.1)]tan (tan )tan (tan [21
'88'77=-+-ααααπ
a a z z
表3 滑移齿轮9、10参数
序号 项目
代号 计算公式及计算结果
1 齿数
齿轮9 Z 9 15 齿轮10
Z 10
61 2 模数 m
2 3 压力角 α
200 4 齿顶高系数 *a
h 1 5 顶隙系数 *c
0.25
6 标准中心距 a
76)(2
1
109=+=
z z m a 7 实际中心距 'a
'a =77
8
啮合角
'α
''arccos(cos )a a
αα==21.950
9
变位系数
齿轮9
9x 9x =0.510
齿轮10 10
x
10x =0.340
10
齿顶高
齿轮9
9a h
020.3)(9*
9=+=x h m h a a
齿轮10
10
a h
680.2)(10*10=+=x h m h a a
11
齿根高
齿轮9
9f h
48.1)(9**9=-+=x c h m h a f
齿轮10
10f h
82.1)(10**10=-+=x c h m h a f
12
分度圆直径
齿轮9
9d
3099==mz d 齿轮10 10d
1221010==mz d 13
齿顶圆直径
齿轮9
9a d
04.362999=+=a a h d d 齿轮10
10
a d
36.1272101010=+=a a h d d
14
齿根圆直径
齿轮9
9f d
04.272999=-=f f h d d
齿轮10 10f d
36.1182101010=-=f f h d d
15
齿顶圆压力
角
齿轮9
9a α
o a b a d d 537.38)/arccos(999==α
齿轮10
10
a α
o a b a d d 823.25)/arccos(101010==α
16 重合度
ε
7248.1)]tan (tan )tan (tan [21
'1010'99=-+-ααααπ
a a z z
5、定轴齿轮变速传动中每对齿轮几何尺寸及重合度的计算
表4 定轴圆柱齿轮11、12参数
(定轴圆柱齿轮13、14的参数与齿轮11、12对应相同)
序号 项目
代号 计算公式及计算结果
1 齿数
齿轮11 Z 11 16 齿轮12
Z 12
21 2 模数 m 3 3 压力角 α
200 4 齿顶高系数 *a
h 1 5 顶隙系数 *c
0.25
6 标准中心距 a
5.55)(2
1
1211=+=
z z m a 7 实际中心距 'a
'a =56
8
啮合角 'α
''arccos(cos )a a
αα==21.3610
9 变位系数 齿轮11
11
x
11x =0.121
齿轮12
12
x
12x =062.0
10
齿顶高
齿轮11
11a h
363.3)(11*
11=+=x h m h a a
齿轮12
12
a h
186.3)(12*12=+=x h m h a a
11
齿根高
齿轮11
11
f h
387.3)(11**11=-+=x c h m h a f
齿轮12 12f h
564.3)(12**12=-+=x c h m h a f
12
分度圆直径
齿轮11
11d
481111==mz d
齿轮12
12d
631212==mz d 13
齿顶圆直径
齿轮11
11
a d
726.542111111=+=a a h d d
齿轮12
12
a d
372.692121212=+=a a h d d 14
齿根圆直径
齿轮11
11f d
226.412111111=-=f f h d d
齿轮12
12f d
872.552121212=-=f f h d d
15
齿顶圆压力
角
齿轮11
11
a α
o a b a d d 492.34)/arccos(111111==α
齿轮12
12
a α
o a b a d d 419.31)/arccos(121212==α
16 重合度
ε
488.1)]tan (tan )tan (tan [21
'1212'1111=-+-ααααπ
a a z z
表5 圆锥齿轮15、16参数
序号
项目
代号
计算公式及计算结果
1
齿数
齿轮15
15z
19 齿轮16
16z
25 2 模数 m
3 3
压力角
α
200
4 齿顶高系数 *a
h 1 5
顶隙系数
*c
0.2
6
分度圆锥角
齿轮15
15δ 2348.37cot
15
16
15==z z arc δ 齿轮16 16δ
7652
.52901516=-=δδo
7
分度圆直径
齿轮15
15d
571515==mz d 齿轮16
16d
751616==mz d
8
锥距
R 101.472
1212
16215216215=+=+=
z z m d d R 9
齿顶高
齿轮15
15a h
3*
15==a a mh h 齿轮16 16a h
3*16==a a mh h 10
齿根高
齿轮15
15f h 6.3)(**15=+=c h m h a f 齿轮16 16f h
6.3)(**16=+=c h m h a f
11
齿顶圆直径
齿轮15
15a d
776.61cos 215151515=+=δa a h d d 齿轮16 16a d
630.78cos 216161616=+=δa a h d d 12
齿根圆直径
齿轮15
15f d 267.51cos 215151515=-=δf f h d d 齿轮16
16f d
643.70cos 216161616=-=δf f h d d
13
当量齿数
齿轮15
15v z 096.20cos 15
15
15==
δz z v
齿轮16
16v z
702.34cos 16
16
16==
δz z v
14
当量齿轮齿顶圆压力角
齿轮15 1va α
31.7231° 齿轮16
2va α
26.8023°
15 重合度
ε
6433.1)]tan (tan )tan (tan [21'
1616'1515=-+-v va v v va v z z ααααπ
6、实际输出转速
891.405.225
19
211621165818745max 11=÷????
=÷??=p f v i i i n n 150.375.225
19
211621166017745max 22=÷????
=÷??=p f v i i i n n 829.325.225
19
211621166115745max 33=÷????
=÷??=p f v i i i n n
H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业二 课程名称: 机械原理 设计题目: 凸轮机构设计 一.设计题目 设计直动从动件盘形凸轮机构, 1.运动规律(等加速等减速运动) 推程 0450≤≤? 推程 009045≤≤? 2.运动规律(等加速等减速运动) 回程 00200160≤≤? 回程 00240200≤≤? 三.推杆位移、速度、加速度线图及凸轮s d ds -φ 线图 采用VB 编程,其源程序及图像如下: 1.位移: Private Sub Command1_Click() Timer1.Enabled = True '开启计时器 End Sub Private Sub Timer1_Timer() Static i As Single
Dim s As Single, q As Single 'i作为静态变量,控制流程;s代表位移;q代表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 i = i + 0.1 If i <= 45 Then q = i s = 240 * (q / 90) ^ 2 Picture1.PSet Step(q, -s), vbRed ElseIf i >= 45 And i <= 90 Then q = i s = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2) Picture1.PSet Step(q, -s), vbGreen ElseIf i >= 90 And i <= 150 Then q = i s = 120 Picture1.PSet Step(q, -s), vbBlack ElseIf i >= 150 And i <= 190 Then q = i s = 120 - 240 * (q - 150) ^ 2 / 6400 Picture1.PSet Step(q, -s), vbBlue ElseIf i >= 190 And i <= 230 Then
机械原理大作业2-齿轮机构分析
Harbin Institute of Technology 机械原理大作业三 题目:齿轮传动设计 院系:机电工程学院 班级: 姓名: 学号:
哈尔滨工业大学 1、设计题目 如图所示机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速,据下表中的原始数据,设计该传动系统。
2、传动比的分配计算 电动机转速n=745r/min,输出转速n1=23 r/min,n2=29 r/min,n3=35 r/min,带传动的最大传动比i pmax=2.8,滑移齿轮传动的最大传动比i vmax=4.5,定轴齿轮传动的最大传动比i dmax=4.5。 根据传动系统的原始参数可知,传动系统的总传动比为 i1=n/n1=745/35=21.286, i2=n/n2=745/29=25.690, i3=n/n3=745/23=32.391, 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。 设带传动的传动比为i pmax=2.8,滑移齿轮的传动比为i v1, i v2 和i v3, 定轴齿轮传动的传动比为i f,则总传动比 i1= i pmax*i v1*i f, i2= i pmax*i v2*i f,
i3= i pmax*i v3*i f, 令i v3=i vmax=4.5,则可得定轴齿轮传动部分的传动比i f=i3/(i pmax*i vmax)= 32.391/(2.8*4.5)= 2.571, 滑移齿轮传动的传动比 i v1 =i1/(i pmax*i vmax) =21.286/(2.8*2.571)= 2.957 i v2 =i2/(i pmax*i vmax) =25.690/(2.8*2.571)= 3.569 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 id=3√i f= 3√2.571 =1.370 小于等于 i pmax = 4 3、设定齿轮齿数及基本参数 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和10为角度变位齿轮,其齿数:z5 = 13,z6 = 38,z7 = 11,z8 =39,z9 = 9,z10 =40。它们的齿顶高系数h a* = 1,径向间隙系数c* = 0.25,分度圆压力角α = 20°,实际中心距a’= 51mm。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:z11=z13=14,z12=z14=19。它们的齿顶高系数h a* =1,径向间隙系数c*=0.25,分度圆压力角α = 20°,实际中心距a’=51mm。 圆锤齿轮15和16选择为标准齿轮,其齿数:z15=17,z16=24。它们的齿顶高系数h a* =1,径向间隙系数c*=0.2,分度圆压力角α=20°。 4、滑移齿轮变速传动中每对齿轮的几何尺寸及重合度
第二章 一、单项选择题: 1.两构件组成运动副的必备条件是 。 A .直接接触且具有相对运动; B .直接接触但无相对运动; C .不接触但有相对运动; D .不接触也无相对运动。 2.当机构的原动件数目小于或大于其自由度数时,该机构将 确定的运动。 A .有; B .没有; C .不一定 3.在机构中,某些不影响机构运动传递的重复部分所带入的约束为 。 A .虚约束; B .局部自由度; C .复合铰链 4.用一个平面低副联二个做平面运动的构件所形成的运动链共有 个自由度。 A .3; B .4; C .5; D .6 5.杆组是自由度等于 的运动链。 A .0; B .1; C .原动件数 6.平面运动副所提供的约束为 A .1; B .2; C .3; D .1或2 7.某机构为Ⅲ级机构,那么该机构应满足的必要充分条件是 。 A .含有一个原动件组; B .至少含有一个基本杆组; C .至少含有一个Ⅱ级杆组; D .至少含有一个Ⅲ级杆组。 8.机构中只有一个 。 A .闭式运动链; B .原动件; C .从动件; D .机架。 9.要使机构具有确定的相对运动,其条件是 。 A .机构的自由度等于1; B .机构的自由度数比原动件数多1; C .机构的自由度数等于原动件数 第三章 一、单项选择题: 1.下列说法中正确的是 。 A .在机构中,若某一瞬时,两构件上的重合点的速度大小相等,则该点为两构件的瞬心; B .在机构中,若某一瞬时,一可动构件上某点的速度为零,则该点为可动构件与机架的瞬心; C .在机构中,若某一瞬时,两可动构件上重合点的速度相同,则该点称为它们的绝对瞬心; D .两构件构成高副,则它们的瞬心一定在接触点上。 2.下列机构中k C C a 32 不为零的机构是 。 A .(a)与(b); B .(b)与(c); C .(a)与(c); D .(b)。 3.下列机构中k C C a 32 为零的机构是 。 A .(a); B . (b); C . (c); D .(b)与(c)。
机械原理大作业(二) 作业名称:机械原理 设计题目:凸轮机构 班级: 设计者: 学号: 指导教师: 设计时间: 哈尔滨工业大学机械设计
1. 设计题目 (1) 凸轮机构运动简图: 2.凸轮推杆升程,回程运动方程及推杆位移,速度,加速度线图 (1) 推杆升程,回程运动方程如下: A.推杆升程方程: 设为ω1rad/s )],2 3 cos(1[30)(Φ-=Φs ;3/20π≤Φ≤ )),23 sin(45)(Φ=Φv ;3/20π≤Φ≤ ),2 3 cos(2135)(Φ= Φa ;3/20π≤Φ≤ B.推杆回程方程: ],2310[ 60)(Φ-=Φπs ;3567ππ≤Φ≤ ,120)(π-=Φv ;3 5 67ππ≤Φ≤ ,0)(=Φa ;3 5 67ππ≤Φ≤ 2)推杆位移,速度,加速度线图如下: A.推杆位移线图
凸轮位移B.推杆速度线图 凸轮速度C.推杆加速度线图
凸轮速度 3.凸轮机构的错误!未找到引用源。-s线图,并依次确定凸轮的基圆半径和偏距. 1) 凸轮机构的错误!未找到引用源。-s线图:
(2)确定凸轮的基圆半径和偏距: 由图知:可取错误!未找到引用源。=400 mm,e=100mm 即:基圆半径错误!未找到引用源。=错误!未找到引用源。=412.31mm 偏距e=100mm 4.滚子半径的确定及凸轮理论轮廓和实际轮廓的绘制. 可取滚子半径r=60mm,则凸轮理论轮廓和实际轮廓如下: (1) 程序如下 fai01=2*pi/3; fai02=pi/2; fais1=pi/2; fais2=5*pi/9; h=60; fai1=0:0.001*pi:2*pi/3; fai2=2*pi/3:0.001*pi:7*pi/6; fai3=7*pi/6:0.001*pi:5*pi/3; fai4=5*pi/3:0.001*pi:2*pi; s1=h/2*(1-cos(pi*fai1/fai01)); s2=h+fai2*0; s3=h*(1-(fai3-(fai01+fais1))/fai02); s4=fai4*0; plot(fai1,s1,fai2,s2,fai3,s3,fai4,s4) v1=pi*h/(2*fai01)*sin(pi*fai1/fai01); v2=0*fai2; v3=-h/fai02; v4=0*fai4; plot(fai1,v1,fai2,v2,fai3,v3,fai4,v4) a1=2*pi*h/fai01.^2*cos(pi*fai1/fai01); a2=0*fai2;
机械原理大作业-齿轮15 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
Harbin Institute of Technology 大作业设计说明书 课程名称:机械原理 设计题目:齿轮 院系:能源学院 班级: 设计者: 学号: 指导教师: 设计时间: 哈尔滨工业大学
1 设计题目 如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出3种不同转速。 序号 电机转速 (r/min) 输出轴转速 (r/min) 带传动 最大传 动比 滑移齿轮传动 定轴齿轮传动 最大 传动比 模数 圆柱齿轮 圆锥齿轮 一对齿轮最 大传动比 模数 一对齿轮最 大传动比 模数 15 745 25 30 37 2.8≤ 4.5≤ 2 4.5≤ 3 4≤ 3 2 传动比分配 电机转速为0745/min n r =设输出转速为123,,n n n ,带传动最大传动比 max p i ,滑移齿轮传动最大传动比max v i ,定轴齿轮传动每对齿轮最大传动比 max d i 。 传动系统总传动比:011745 20.1437n i n = == 022745 24.8330 n i n = == 03374529.825 n i n = ==
带传动传动比max p i ,滑移齿轮传动比123,,v v v i i i ,定轴齿轮传动比 f i ,则总传动比又等于 1max 12max 23max 3p v f p v f p v f i i i i i i i i i i i i === 令3max 4.5v v i i ==,可得定轴传动比:3max max 29.8 2.372.8 4.5 f p v i i i i = ==? 由此可得: 11max 2 2 max 20.14 3.03 2.8 2.37 24.83 3.742.8 2.37 v p f v p f i i i i i i i i = = =?===? 定轴齿轮有3 对齿轮组成,每对传动比为: 1.334d i ===≤ 3 齿数确定 滑移齿轮:选择5、6、7、8为高度变位齿轮,9、10为标准齿轮,齿数分别为: 567826,79,22,83z z z z ====和91019,86z z ==;齿顶高系数 1a h *=, 径向间隙系数0.25c * =,分度圆压力角20α=,实际中心距 105a mm '=。 定轴齿轮:选择11、12、13、14为高度变位齿轮,齿数分别为: 1112131419,25,19,25z z z z ====;齿顶高系数1a h * =,径向间隙系数 0.25c *=,分度圆压力角20α=,实际中心距66a mm '=。圆锥齿轮15、16
机械原理大作业 二、题目(平面机构的力分析) 在图示的正弦机构中,已知l AB =100 mm,h1=120 mm,h2 =80 mm,W1 =10 rad/s(常数),滑块2和构件3的重量分别为G2 =40 N和G3 =100 N,质心S2 和S3 的位置如图所示,加于构件3上的生产阻力Fr=400 N,构件1的重力和惯性力略去不计。试用解析法求机构在Φ1=60°、150°、220°位置时各运动副反力和需加于构件1上的平衡力偶M 。 b Array 二、受力分析图
三、算法 (1)运动分析 AB l l =1 滑块2 22112112/,/s m w l a s m w l v c c == 滑块3 21113113/cos ,sin s m l w v m l s ??== 212 113/sin s m w l a ?-= (2)确定惯性力 N w l g G a m F c 2 1122212)/(== N w l g G a m F 121133313sin )/(?-== (3)受力分析 i F F i F F x R D R x R C R 43434343,=-= j F j F F R R R 232323-==
j F i F j F i F F R x R y R x R R 2121121212--=+= j F F F y R x R R 414141+= 取移动副为首解副 ① 取构件3为分离体,并对C 点取矩 由0=∑y F 得 1323F F F r R -= 由0=∑x F 得 C R D R F F 4343= 由 ∑=0C M 得 2112343/cos h l F F R D R ?= ②取构件2为分离体 由0=∑x F 得 11212cos ?R x R F F = 由0 =∑y F 得 1123212sin ?F F F R y R -= ③取构件1为分离体,并对A 点取矩 由0=∑x F 得 x R x R F F 1241= 由0 =∑ y F 得 y R y R F F 1241= 由0=A M 得 1132cos ?l F M R b = 四、根据算法编写Matlab 程序如下: %--------------已知条件---------------------------------- G2=40; G3=100; g=9.8; fai=0; l1=0.1; w1=10; Fr=400; h2=0.8; %--------分布计算,也可将所有变量放在一个矩阵中求解------------------- for i=1:37 a2=l1*(w1^2); a3=-l1*(w1^2)*sin(fai); F12=(G2/g)*a2;
第二章 4.在平面机构中,具有两个约束的运动副是移动副或转动副;具有一个约束的运动副是高副。 5.组成机构的要素是构件和转动副;构件是机构中的_运动_单元体。 6.在平面机构中,一个运动副引入的约束数的变化范围是1-2。 7.机构具有确定运动的条件是_(机构的原动件数目等于机构的自由度)。 8.零件与构件的区别在于构件是运动的单元体,而零件是制造的单元体。 9.由M个构件组成的复合铰链应包括m-1个转动副。 10.机构中的运动副是指两构件直接接触所组成的可动联接。 1.三个彼此作平面平行运动的构件共有3个速度瞬心,这几个瞬心必定位于同一直线上。 2.含有六个构件的平面机构,其速度瞬心共有15个,其中有5个是绝对瞬心,有10个是相对瞬心。3.相对瞬心和绝对瞬心的相同点是两构件相对速度为零的点,即绝对速度相等的点, 不同点是绝对瞬心点两构件的绝对速度为零,相对瞬心点两构件的绝对速度不为零。 4.在由N个构件所组成的机构中,有(N-1)(N/2-1)个相对瞬心,有N-1个绝对瞬心。 5.速度影像的相似原理只能应用于同一构件上_的各点,而不能应用于机构的不同构件上的各点。6.当两构件组成转动副时,其瞬心在转动副中心处;组成移动副时,其瞬心在移动方向的垂直无穷远处处;组成纯滚动的高副时,其瞬心在高副接触点处。 7.一个运动矢量方程只能求解____2____个未知量。 8.平面四杆机构的瞬心总数为_6__。 9.当两构件不直接组成运动副时,瞬心位置用三心定理确定。 10.当两构件的相对运动为移动,牵连运动为转动动时,两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为a*kc2c3,方向与将vc2c3沿ω2转90度的方向一致。 1.从受力观点分析,移动副的自锁条件是驱动力位于摩擦锥之内, 转动副的自锁条件是驱动力位于摩擦圆之内。 2.从效率的观点来看,机械的自锁条件是η<0。 3.三角形螺纹的摩擦力矩在同样条件下大于矩形螺纹的摩擦力矩,因此它多用于联接。 4.机械发生自锁的实质是无论驱动力多大,机械都无法运动。 F方向的方法是与2构件相对于1 5.在构件1、2组成的移动副中,确定构件1对构件2的总反力 R 12 构件的相对速度V12成90度+fai。 6.槽面摩擦力比平面摩擦力大是因为槽面的法向反力大于平面的法向反力。 7.矩形螺纹和梯形螺纹用于传动,而三角形(普通)螺纹用于联接。 8.机械效率等于输出功与输入功之比,它反映了输入功在机械中的有效利用程度。 9.提高机械效率的途径有尽量简化机械传动系统,选择合适的运动副形式, 尽量减少构件尺寸,减少摩擦。 1.机械平衡的方法包括、平面设计和平衡试验,前者的目的是为了在设计阶段,从结构上保证其产生的惯性力最小,后者的目的是为了用试验方法消除或减少平衡设计后生产出的转子所存在的不平衡量_。2.刚性转子的平衡设计可分为两类:一类是静平衡设计,其质量分布特点是可近似地看做在同一回转平面内,平衡条件是。∑F=0即总惯性力为零;另一类是动平衡设计,其质量分布特点是不在同一回转平面内,平衡条件是∑F=0,∑M=0。 3.静平衡的刚性转子不一定是动平衡的,动平衡的刚性转子一定是静平衡的。 4.衡量转子平衡优劣的指标有许用偏心距e,许用不平衡质径积Mr。
三、 齿轮传动设计 一、设计题目 如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速。根据表中的传动系统原始参数设计该传动系统。 1.机构运动简图 1.电动机 2,4.皮带轮 3.皮带 5,6,7,8,9,10,11,12,13,14.圆柱齿轮 15,16.圆锥齿轮 2.机械传动系统原始参数 二、传动比的分配计算 电动机的转速1450/min n r =,输出转速1n =50r/min ,2n =45r/min ,3n =40r/min, 带传动的最大传动比max 2.5p i =,滑移齿轮的传动的最大传动比max 4v i =,定轴齿轮传动的最大传动比max 4d i =。
根据系统的原始参数,系统的总传动比为1i = 1 n n =1450/50=29.00 2i = 2n n =1450/45=32.222 3i =3 n n =1450/40=36.25 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为max 2.5p i =,滑移齿轮的传动比为1v i 、2v i 和3v i ,定轴齿轮传动的传动比为f i 则总传动比为 1max 1p v f i i i i = 2max 2p v f i i i i = 3max 3p v f i i i i = 令3max 4v v i i == 则可得定轴齿轮传动部分的传动比为f i = max max 3 *v p i i i =4*5.225.36=3.625 滑移齿轮传动的传动比为1v i = f p i i i *max 1= 9 .2*5.229 =4 2v i = f p i i i *max 2=9.2*5.222 .32=4.444 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 d i =3f i =3625.3=1.536 三、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、 8、9和10、为角度变位齿轮,其齿数: 52,19,41,17,50,231098765======z z z z z z 它们的齿顶高系数1a h *=,顶隙系数0.25c *=,分度圆压力角=20a o ,实际中心距取mm a 73=。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11, 12, 13和14为角度变位齿轮,齿数:==1311z z 17,==1412z z 23。它们的齿顶高系数 1a h *=,顶隙系数0.25c *=,分度圆压力角=20a o ,实际中心距'=56mm a 。圆锥
Harbin Institute of Technology 机械原理大作业(一) 课程名称:机械原理 设计题目:连杆机构运动分析 院系:机电工程学院 班级: 设计者: 学号: 指导教师:
一、题目(13) 如图所示机构,已知各构件尺寸:Lab=150mm;Lbc=220mm;Lcd=250mm;Lad=300mm;Lef=60mm;Lbe=110mm;EF⊥BC。试研究各杆件长度变化对F点轨迹的影响。 二、机构运动分析数学模型 1.杆组拆分与坐标系选取 本机构通过杆组法拆分为: I级机构、II级杆组RRR两部分如下:
2.平面构件运动分析的数学模型 图3 平面运动构件(单杆)的运动分析 2.1数学模型 已知构件K 上的1N 点的位置1x P ,1y P ,速度为1x v ,1Y v ,加速度为1 x a ,1y a 及过点的1N 点的线段12N N 的位置角θ,构件的角速度ω,角加速度ε,求构件上点2N 和任意指定点3N (位置参数13N N =2R ,213N N N ∠=γ)的位置、 速度、加速度。 1N ,3N 点的位置为: 211cos x x P P R θ=+ 211sin y y P P R θ=+ 312cos()x x P P R θγ=++ 312sin()y y P P R θγ=++ 1N ,3N 点的速度,加速度为: 211211sin ()x x x y y v v R v P P ωθω=-=-- 211121sin (-) y y y x x v v R v P P ωθω=-=- 312131sin() () x x x y y v v R v P P ωθγω=-+=--312131cos()() y y y x x v v R v P P ωθγω=-+=-- 2 212121()()x x y y x x a a P P P P εω=---- 2 212121()() y y x x y y a a P P P P εω=+--- 2313131()()x x y y x x a a P P P P εω=---- 23133(1)(1) y y x x y y a a P P P P εω=+--- 2.2 运动分析子程序 根据上述表达式,编写用于计算构件上任意一点位置坐标、速度、加速度的子程序如下: 1>位置计算 function [s_Nx,s_Ny ] =s_crank(Ax,Ay,theta,phi,s) s_Nx=Ax+s*cos(theta+phi); s_Ny=Ay+s*sin(theta+phi); end 2>速度计算 function [ v_Nx,v_Ny ] =v_crank(s,v_Ax,v_Ay,omiga,theta,phi) v_Nx=v_Ax-s*omiga.*sin(theta+phi); v_Ny=v_Ay+s*omiga.*cos(theta+phi); end 3>加速度计算 function [ a_Nx,a_Ny ]=a_crank(s,a_Ax,a_Ay,alph,omiga,theta,phi) a_Nx=a_Ax-alph.*s.*sin(theta+phi)-omiga.^2.*s.*cos(theta+phi);
习 题 7-9 在图示的渐开线齿阔中,基圆半径100b r mm =,试求出: 1)当135mm k r =时,渐开线的展角k θ,渐开线压力角k α和渐开线在K 点的曲率半径k ρ。 2)当020k θ=,025和0 30时,渐开线的压力角k α和向径k r 。 解:1) /cos k b k r r α= 100cos 0.741135 b k k r r α= == 42.2o k α= tan 0.17022k k k θαα=-= sin 90.68k k k r mm ρα== 2) 当20o k θ=时,51.15o k α=,/cos 159.42k b k r r mm α== 当25o k θ=时,'545o k α=,/cos 170.47k b k r r mm α== 当30o k θ=时,'5628o k α=,/cos 181.02k b k r r mm α== 7-10今测得一渐开线直齿标准齿轮齿顶圆直径110mm a d =,齿根圆直径87.5mm f d =,齿数20z =,试确定该齿轮的模数m ,齿顶高系数*a h 和径向间隙系数* c 。 解:* (2)a a d m z h =+
**(22)f a d m z h c =-- f a d d d << d mz = 5m mm ∴= 代入求解,得: *1a h =,*0.25c = 7-11已知一对外啮合渐开线直齿圆柱齿轮,齿数120z =,241z =,模数2mm m =, *1a h =,*0.25c =,020α=,求: 1)当该对齿轮为标准齿轮时,试计算齿轮的分度圆直径1d 、2d ,基圆直径1b d 、2b d ,齿顶圆直径1a d 、2a d ,齿根圆直径1f d 、2f d ,分度圆上齿距p 、齿厚s 和齿槽宽e 。 2)当该对齿轮为标准齿轮且为正确安装时的中心距,求齿轮1的齿顶压力角1a α,齿顶处齿廓的曲率半径1a ρ。 解:1) 1140d mz mm ==,2282d mz mm == 11cos 37.59b d mz mm α==,22cos 77.05b d mz mm α== *11(2)44a a d m z h mm =+=,* 22(2)86a a d m z h mm =+= **11(22)35f a d m z h c mm =--=,** 22(22)77f a d m z h c mm =--= 6.28p m mm π==,0.5 3.14S m mm π==,0.5 3.14e p mm == 2)1 11 arccos 31.3o b a a d d α== 111.43a mm ρ== 7-12 渐开线标准齿轮的基圆和齿根圆重合时的齿数为多少(考虑正常齿和短齿两种情况)?齿数为多少时基圆大于齿根圆? 解:cos b d mz α=,** (22)f a d m z h c =-- 若为正常齿,则*1a h =,* 0.25c =
机械原理大作业三 课程名称: 机械原理 级: 者: 号: 指导教师: 设计时间: 1.2机械传动系统原始参数 设计题目: 系: 齿轮传动设计 1、设计题 目 1.1机构运动简图 - 11 7/7777777^77 3 UtH TH7T 8 'T "r 9 7TTTT 10 12 - 77777" 13 ///// u 2
电动机转速n 745r/min ,输出转速n01 12r/mi n , n02 17r /mi n , n°323r/min,带传动的最大传动比i pmax 2.5 ,滑移齿轮传动的最大传动比 i vmax 4,定轴齿轮传动的最大传动比i d max 4。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实 现。设带传动的传动比为i pmax 2.5,滑移齿轮的传动比为9、心、「3,定轴齿轮传动的传动比为i f,则总传动比 i vi i vmax 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、 7、8 9和10为角度变位齿轮,其齿数: Z5 11,Z6 43,Z7 14,Z8 39,Z9 18,乙。35 ;它们的齿顶高系数0 1,径向间隙
系数c 0.25,分度圆压力角200,实际中心距a' 51mm。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:Z11 z13 13,乙 2 z14 24。它们的齿顶高系数d 1,径向间隙系数c 0.25,分度圆压力角200,实际中心距 a' 46mm。圆锥齿轮15和16选择为标准齿轮令13,乙 6 24,齿顶高系数 h a 1,径向间隙系数c 0.20,分度圆压力角为200(等于啮合角’)。 4、滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算 4.1滑移齿轮5和齿轮6
六、(15分)已知被加工的直齿圆柱齿轮毛坯的转动角速度ω=1rad/s ,齿条刀移动的线速度v 刀=60mm/s ,其模数m 刀=4mm ,刀具中线(分度线)与齿轮毛坯轴心的距离a =58 mm 。试问:(1)被加工齿轮的齿数应是多少?(2)这样加工出来的齿轮是标准齿轮还是变位齿轮?如为变位齿轮,那么是正变位,还是负变位?其变位系数x 是多少? 六、总分15分,(1)5 分;(2)5 分;(3)5 分 (1)由m m = 刀=4 mm r OP ==v 刀 /ω=60 mm z r m ==?=2260 4 30 (2)刀具中线向轮心推入2mm ,故加工出是负变位齿轮。 (3) x m = -= -=-2 2 4 05.
6、已 知 一 对 外 啮 合 直 齿 圆 柱 标 准 齿 轮 传 动,m =4 mm ,α=?20, h a * =1, 标 准 中 心 距a =90 mm , 传 动 比i 1215=. 。 (1) 试 求 两 轮 的 齿 数z 1、z 2; (2) 试 求 两 轮 的 分 度 圆 半 径r 1、r 2, 齿 顶 圆 半 径r a1 、r a2 ; (3) 按 比 例 作 图, 画 出 这 对 齿 轮 的 齿 顶 圆、 实 际 啮 合 线 段 B B 12和 理 论 啮 合 线 段N N 12 ; (4) 从 图 上 量 取 所 需 尺 寸 计 算 重 合 度ε, 并 给 出 单 齿 及 双 齿 啮 合 区。
6、 (1) i z z 12122115===ωω//. z z 2115=. a m z z =+()/122 a m z z =+(.)/11152 9042251=?(/).z z 118= z z 2115151827==?=. . (2 分) (2) r mz 11236 ==/ mm r mz 22254==/ mm r r h m a a * 1140=+= mm r r h m a a *2258=+= mm (2 分) (3) 作 图: B B 12186=. mm N N 1231= mm (2 分) (4) p m b cos .==πα118085 mm ε==B B p 121575/.b (4 分)
32. 在题43图中,已知蜗杆的转速min 9001r n =,602=z ,25'2=z , 203=z ,25'3=z ,204=z ,30'4=z ,355=z ,28'5=z ,1356=z 。 (1)写出6116ωω=i ,6226ωω=i ,6 '56'5ωω=i 的表达式; (2)确定6n 的大小和转向。 解:(1)、54326543261162' '''????????==z z z z z z z z z i ωω,方向通过划箭头来确定; 543265436226' '''??????+==z z z z z z z z i ωω; 566565' ''+==z z i ωω; (2)、因为10828 30252521353520206025432654326116=????????=????????==''''z z z z z z z z z i ωω 所以min 33.8108 9001616r i n n === ,方向“↑”,如图所示。 6 n 题43图
33. 题44图为一用于自动化照明灯具的轮系,已知 min 5.191r n =,601=z ,403=z , 30'22==z z ,404=z ,1205=z 。 (1)轮系属于什么类型的周转轮系; (2)确定箱体的转速和转向。 解: (1)、因为13424323=-?-?=--=h l P P n F 所以该周转轮系属于行星轮系。 (2)、24030601204030) 1(42153251315-=????-=????-=---=''z z z z z z n n n n i H H H 因为05=n 所以311==H H n n i 最后得箱体的转速为min 5.635.1911r i n n H H === ,方向与n 1相同。 34. 计算题45图所示大减速比减速器的传动比G A AG i ωω=。 解:15 47-=-=--=A B C B C A C AB z z i ωωωω 因为0=B ω,所以A C ωω6215= 17 155016??-=??-=--=F A G E C G C A C AG z z z z i ωωωω 将A C ωω62 15=代入上式,最后得 67.3306== G A AG i ωω 题44图 题44图 题45图
设计说明书 1 设计题目 如图所示直动从动件盘形凸轮机构,其原始参数见下表,据此设计该凸轮机构。 2、推杆升程、回程运动方程及位移、速度、加速度线图 2.1凸轮运动理论分析 推程运动方程: 01cos 2h s π?????=-?? ?Φ???? 1 00sin 2h v πωπ??? = ?ΦΦ?? 22 12 00cos 2h a πωπ???= ?ΦΦ?? 回程运动方程: ()0' 1s s h ?-Φ+Φ?? =- ??Φ ? ? 1'0 h v ω=- Φ 0a = 2.2求位移、速度、加速度线图MATLAB 程序 pi= 3.1415926; c=pi/180; h=140; f0=120; fs=45; f01=90; fs1=105; %升程 f=0:1:360; for n=0:f0
s(n+1)=h/2*(1-cos(pi/f0*f(n+1))); v(n+1)=pi*h/(2*f0*c)*sin(pi/f0*f(n+1)); a(n+1)=pi^2*h/(2*f0^2*c^2)*cos(pi/f0*f(n+1)); end %远休程 for n=f0:f0+fs s(n+1)=140; v(n+1)=0; a(n+1)=0; end %回程 for n=f0+fs:f0+fs+f01 s(n+1)=h*(1-(f(n+1)-(f0+fs))/f01); v(n+1)=-h/(f01*c); a(n+1)=0; end %近休程 for n=f0+fs+f01:360; s(n+1)=0; v(n+1)=0; a(n+1)=0; end figure(1);plot(f,s,'k');xlabel('\phi/\circ');ylabel('s/mm');grid on;title('推杆位移线图') figure(2);plot(f,v,'k');xlabel('\phi/\circ');ylabel('v/(mm/s)');grid on;title('推杆速度线图') figure(3);plot(f,a,'k');xlabel('\phi/\circ');ylabel('a/(mm/s2');grid on;title('推杆加速度线图') 2.3位移、速度、加速度线图
习题 7-9 在图示的渐开线齿阔中,基圆半径100 b r mm =,试求出: 1)当135mm k r=时,渐开线的展角 k θ,渐开线压力角 k α和渐开线在K点的曲率半径 k ρ。 2)当0 20 k θ=,0 25和0 30时,渐开线的压力角 k α和向径 k r。 解:1) /cos k b k r rα = 100 cos0.741 135 b k k r r α=== 42.2o k α= tan0.17022 k k k θαα =-= sin90.68 k k k r mm ρα == 2) 当20o k θ=时,51.15o k α=,/cos159.42 k b k r r mm α == 当25o k θ=时,' 545o k α=,/cos170.47 k b k r r mm α == 当30o k θ=时,' 5628 o k α=,/cos181.02 k b k r r mm α == 7-10今测得一渐开线直齿标准齿轮齿顶圆直径110mm a d=,齿根圆直径87.5mm f d=,齿数20 z=,试确定该齿轮的模数m,齿顶高系数* a h和径向间隙系数*c。 解:* (2) a a d m z h =+
**(22)f a d m z h c =-- f a d d d << d mz = 5m mm ∴= 代入求解,得: *1a h =,*0.25c = 7-11已知一对外啮合渐开线直齿圆柱齿轮,齿数120z =,241z =,模数2mm m =, *1a h =,*0.25c =,020α=,求: 1)当该对齿轮为标准齿轮时,试计算齿轮的分度圆直径1d 、2d ,基圆直径1b d 、2b d ,齿顶圆直径1a d 、2a d ,齿根圆直径1f d 、2f d ,分度圆上齿距p 、齿厚s 和齿槽宽e 。 2)当该对齿轮为标准齿轮且为正确安装时的中心距,求齿轮1的齿顶压力角1a α,齿顶处齿廓的曲率半径1a ρ。 解:1) 1140d mz mm ==,2282d mz mm == 11cos 37.59b d mz mm α==,22cos 77.05b d mz mm α== *11(2)44a a d m z h mm =+=,* 22(2)86a a d m z h mm =+= **11(22)35f a d m z h c mm =--=,** 22(22)77f a d m z h c mm =--= 6.28p m mm π==,0.5 3.14S m mm π==,0.5 3.14e p mm == 2)1 11 arccos 31.3o b a a d d α== 111.43a mm ρ= = 7-12 渐开线标准齿轮的基圆和齿根圆重合时的齿数为多少(考虑正常齿和短齿两种情况)?齿数为多少时基圆大于齿根圆? 解:cos b d mz α=,** (22)f a d m z h c =-- 若为正常齿,则*1a h =,* 0.25c =
《机械原理》大作业 题目机械原理 齿轮机构设计 专业机械设计制造及其自动化 学号 学生 指导教师刘福利 完成日期2018.5.30
1.设计题目(21号) 如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速。根据表中的传动系统原始参数设计该传动系统。 1.1机构运动简图 1.电动机 2,4.皮带轮 3.皮带 5,6,7,8,9,10,11,12,13,14.圆柱齿轮15,16.圆 锥齿轮 1.2机械传动系统原始参数
2.传动比的分配计算 电动机转速n=745r/min,输出转速n 1=40 r/min,n 2 =35 r/min,n 3 =30 r/min, 带传动的最大传动比=2.5,滑移齿轮传动的最大传动比=4,定轴齿轮传动的最大传动比=4。 根据传动系统的原始参数可知,传动系统的总传动比为 =745/40=18.625 =745/35=21.286 =745/30=24.833 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为,滑移齿轮的传动比为,定轴齿轮传动的传动比为,则总传动比 令=4 则可得定轴齿轮传动部分的传动比为 = =2.4833 滑移齿轮传动的传动比= =3.0000 = =3.4287 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 =4 符合设计的参数要求。
3.齿轮齿数的确定 3.1 滑移齿轮传动齿数的确定 根据传动比符合的要求,以及中心距必须和后两个齿轮对相同,齿数最 好互质,不能产生根切以及尺寸尽可能小等一系列原则,初步确定滑移齿轮5,6为标准齿轮,齿数分别为: 18,= 53。设定实际中心距a’=71mm。 根据传动比符合的要求,以及中心距必须和其他两个齿轮对相同, 齿数最好互质,不能产生根切以及尺寸尽可能小等一系列原则,初步确定齿轮7,8,9,10均为角度变位齿轮,齿数分别为16, 55,变位系数 x1=0.55,x2=0.55 ;14,57,变位系数x1=0.50,x2=0.60。 它们的齿顶高系数=1,径向间隙系数=0.25,分度圆压力角=20°,实际 中心距=67mm。 (根据齿轮传动啮合角,齿轮齿数之和,齿轮齿数之比等各个参数,根据变位系数线图,选择适当的变位系数,具体参数见第4部分的齿轮详细参数) 3.2 定轴传动齿轮齿数的确定 根据定轴齿轮变速传动系统中传动比符合的要求,以及齿数最好互质,不能 产生根切以及尺寸尽可能小等一系列原则,可大致选择如下: 圆柱齿轮11、12、13和14为高度变位齿轮,其齿数:=17,23。变位系数x1=0.120,x2=-0.120,它们的齿顶高系数=1,径向间 隙系数=0.25,分度圆压力角=20°。 3.3 圆锥传动齿轮齿数的确定