
定速风电机组的仿真
组员:32111222王浩32111208 乐姗姗32111207 瞿
振林32111212 刘洁波
一、简单介绍
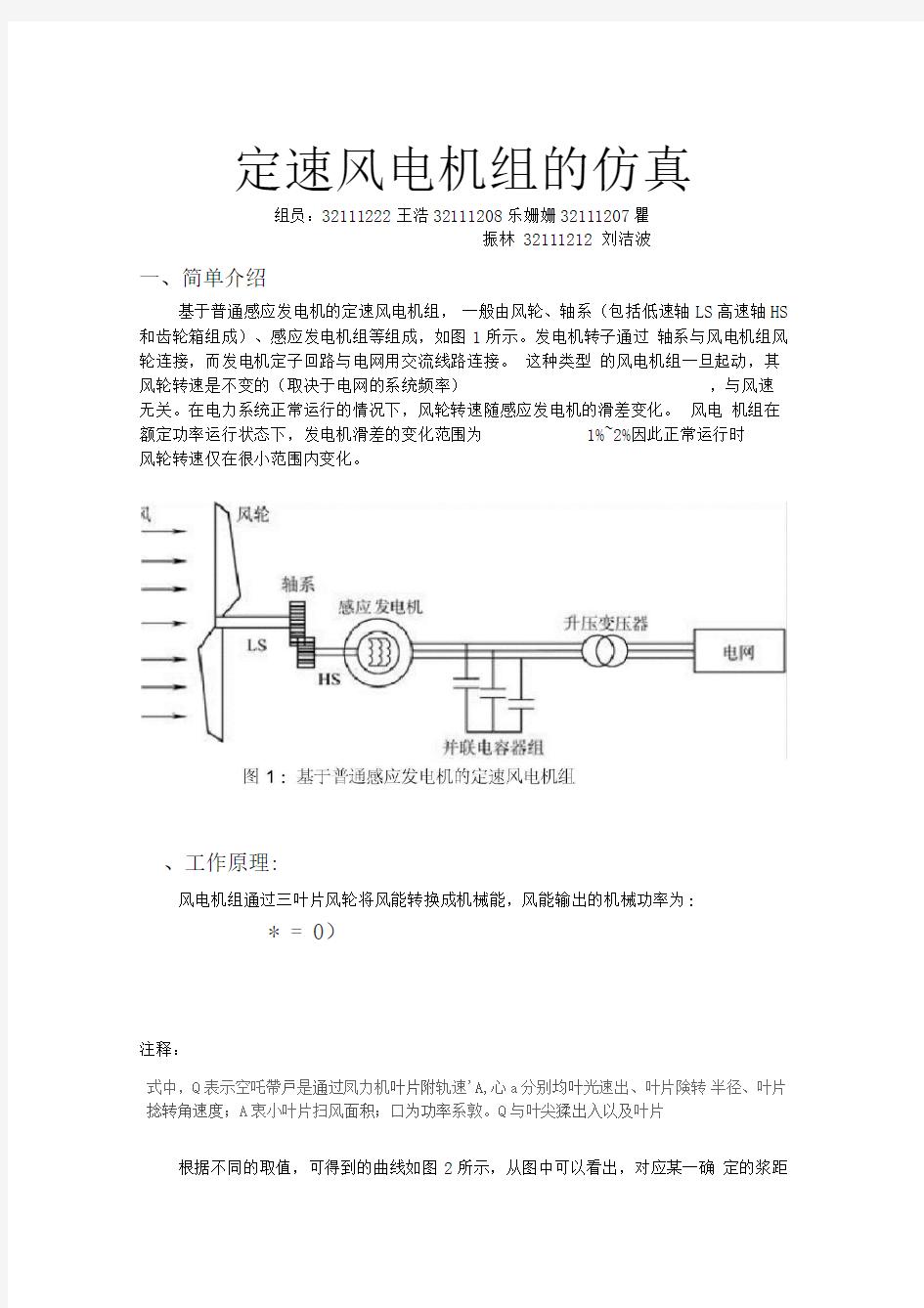
基于普通感应发电机的定速风电机组,一般由风轮、轴系(包括低速轴LS 高速轴HS 和齿轮箱组成)、感应发电机组等组成,如图1所示。发电机转子通过轴系与风电机组风轮连接,而发电机定子回路与电网用交流线路连接。这种类型的风电机组一旦起动,其风轮转速是不变的(取决于电网的系统频率),与风速无关。在电力系统正常运行的情况下,风轮转速随感应发电机的滑差变化。风电机组在额定功率运行状态下,发电机滑差的变化范围为1%~2%因此正常运行时
风轮转速仅在很小范围内变化。
、工作原理:
风电机组通过三叶片风轮将风能转换成机械能,风能输出的机械功率为:
* = 0)
注释:
式中,Q表示空吒帶戸是通过凤力机叶片附轨速'A,心a分别均叶光速出、叶片険转半径、叶片捻转角速度;A衷小叶片扫风面积;口为功率系敦。Q与叶尖猱出入以及叶片
根据不同的取值,可得到的曲线如图2所示,从图中可以看出,对应某一确定的浆距
角,有一极大值存在,也就是说,当风力机运行时不能保证在所有的风
速下都能够产生最大的功率输出。的理论最大值为 0.593,这就是著名的Betz
极限。
Q.5i ------------------------------------------------------------------
6 S 10 12 M 16
图2:关系曲线
定速风电机组的风轮从风中获取机械能,然后通过齿轮轴系传递给感应发电 机,感应发电机再把机械能转换成电能, 输送到电网中。感应发电机向电网提供 有功功率,同时从电网吸收无功功率用来励磁。 因为这种类型的感应发电机无法 控制无功功率,所以利用无功补偿器来改善风电机组的功率因数, 降低机组从电 网中吸收的总的无功功率。现代定速风电机组的风轮转速为 15~20r/min ,发电 机转子的同步转速与电网频率对应。
定速风电机组可以采用定浆距控制, 也可以采用叶片角控制。其中,定浆距
控制风电机组为被动失速控制,它将叶片以固定浆距角用螺栓固定在轮毂上,在 给定风速下,风电机组风轮开始失速,失速条件始于叶片根部,并随着风速加大 逐渐发展到全部叶片长度。这种失速控制方式成本低廉,但是低风速下风电机组 发电效率较低。而叶片角控制定速风电机组为采用负浆距角的主动失速控制方式。 主动失速设置为在风速低于额定风速时优化处理,在风速超过额定风速时限制出
Tubwie Puma CtEiiKLciislics aigfc bc*a _ 0
0 02
04 0G OB 1 12 1.4
Tuitme speed (pi 图3 :风电机组功率特性 W 3S =-E _£E _ ■匸 Eou £ nd)二Aod 否5 口?壬己 力为额定功率。这种主动失速控制方式能够提高风电机组的发电效率。 三、仿真模块: Three-Phase Source【三相电源模块】 Three-Phase Tran sformer(Two Windin gs) 【三相双绕组变压器模块】 Three-Phase Fault【三相故障模块】 Three-Phase PI Section Line 【三相n型等值电路模块】 Three-Phase V-I Measurement【三相电压电流测量元件模块---模拟母线】Wind Turbi ne In duction Gen erator(Phasor Type) 【风电机组模块】 Goto【跳转模块】 Constant【常数系数模块】 From Workspace【从工作空间中输入数据模块】 Bus Selector【总线选择器模块】 Abs【求取绝对值模块】 Scope【观测仪模块】 Powergui【电力图形用户分析界面模块】 四、模型仿真: 一台单机容量为1.5MW的定速风电机组经过升压,通过长度为100km电抗为的架空输电线路与外部系统相连。参考MATLAB^风电机组模型建立如图3所示单机无穷大电源的仿真系统。图4为定速风电机组子系统结构(右键单击风电机组模块Wind Turbine,然后选中下拉列表中的“Look under mask”选项,打开后可见定速风电机组子系统结构)。 rFQVn CcirsMant 一A latK —* B A - 匚 B575.1 (575 V)图4 :单机无穷大电源的仿真系统 ?I .v rd (nri's) Wind Turbine Induction Generator (Phaser Type) 图5 :定速风电机组子系统结构 1、参数设置 ★【Three-Phase Source 】 f 币* Block Parameters: Three-Phase Source Three-Phase Source (nask) (link) Three-phase volt age source iri ^eri^s with RL branch. Paranet ats Load Flow Phase-to-phase rms volt aje (V): 25e3 Phase angle of phase A (decrees): 0 Frequency (Hz): 50 Internal connect ions Yg Specify imped-ance usin$ short-circuit level 3-phase short-circuit level at base voltage (VA) s lOOeS Base volt age (Vrins ph=ph): 2%亍 K/R ratio: OK | Cancel Help 」 App ly ★【Three-Phase Tran sformer(Two Windin gs) 】 i —— 1聞6| | ? J EU 2. ——? Pne^lODO * Wnd [T hVind T urtiin? (彳) H AIH Llmrlaf MM : f m ■毎I "詬 5II f : B1 IW3y? T# ljDu| Ar^tf^DniJks : ¥a*cj[ CerAhMMian *S CD —? Trip S-+ T dp ★【Three-Phase Fault 】 ①电网正常运行时,Three-Phase Fault模块不用设置,即为默认,如下左图 ②电网故障运行时,参数设置如下右图: ★【Three-Phase PI Section Li ne 】 定速风电机组的仿真 组员:江天天赵正严亚俊 一、简介 基于普通感应发电机的定速风电机组,一般由风轮、轴系(包括低速轴LS、高速轴HS和齿轮箱组成)、感应发电机组等组成,如图1所示。发电机转子通过轴系与风电机组风轮连接,而发电机定子回路与电网用交流线路连接。这种类型的风电机组一旦起动,其风轮转速是不变的(取决于电网的系统频率),与风速无关。在电力系统正常运行的情况下,风轮转速随感应发电机的滑差变化。风电机组在额定功率运行状态下,发电机滑差的变化范围为1%~2%,因此正常运行时风轮转速仅在很小范围内变化。 图 1:基于普通感应发电机的定速风电机组 二、工作原理: 风电机组通过三叶片风轮将风能转换成机械能,风能输出的机械功率为: 注释::空气密度; :通过风力机叶片的风速; :叶尖速比; :叶片浆距角; :叶片旋转半径; :叶片旋转角速度; :叶片扫风面积; :功率系数(与叶尖速比以及叶片浆距角有关)。 根据不同的、取值,可得到的曲线如图2所示,从图中可以看出,对应某一确定的浆距角,有一极大值存在,也就是说,当风力机运行时不能保证在所有的风速下都能够产生最大的功率输出。的理论最大值为0.593,这就是著名的Betz极限。 图2:关系曲线 图 3:风电机组功率特性 定速风电机组的风轮从风中获取机械能,然后通过齿轮轴系传递给感应发电机,感应发电机再把机械能转换成电能,输送到电网中。感应发电机向电网提供有功功率,同时从电网吸收无功功率用来励磁。因为这种类型的感应发电机无法控制无功功率,所以利用无功补偿器 来改善风电机组的功率因数,降低机组从电网中吸收的总的无功功率。现代定速风电机组的风轮转速为15~20r/min,发电机转子的同步转速与电网频率对应。 定速风电机组可以采用定浆距控制,也可以采用叶片角控制。其中,定浆距控制风电机组为被动失速控制,它将叶片以固定浆距角用螺栓固定在轮毂上,在给定风速下,风电机组风轮开始失速,失速条件始于叶片根部,并随着风速加大逐渐发展到全部叶片长度。这种失速控制方式成本低廉,但是低风速下风电机组发电效率较低。而叶片角控制定速风电机组为采用负浆距角的主动失速控制方式。主动失速设置为在风速低于额定风速时优化处理,在风速超过额定风速时限制出力为额定功率。这种主动失速控制方式能够提高风电机组的发电效率。 三、仿真模块: Three-Phase Source【三相电源模块】 Three-Phase Transformer(Two Windings)【三相双绕组变压器模块】 Three-Phase Fault【三相故障模块】 Three-Phase PI Section Line【三相π型等值电路模块】 Three-Phase V-I Measurement【三相电压电流测量元件模块---模拟母线】 Wind Turbine Induction Generator(Phasor Type)【风电机组模块】 Goto【跳转模块】 Constant【常数系数模块】 From Workspace【从工作空间中输入数据模块】 Bus Selector【总线选择器模块】 Abs【求取绝对值模块】 Scope【观测仪模块】 Powergui【电力图形用户分析界面模块】 四、模型仿真: 一台单机容量为 1.5MW的定速风电机组经过升压,通过长度为100km、电抗为的架空输电线路与外部系统相连。参考MATLAB中风电 基于MATLAB 的风力发电机组的建模与仿真 学号:xxxxxxx 姓名:xxx 分数: (xxxxxxxxxxxxxxxxxxxxxxxxxxxxxx) 摘要:本文在风力发电机组监测与控制实验的基础上,总结了风力发电机组的建模技术,并对整个系统建立了MATLAB 仿真模型。仿真结果证明,系统输出的功率波形与输入的风速有关,风能利用系数比较低,发电量不足且输出不稳定。 关键词:MATLAB ;风力发电系统;仿真研究 1 引言 对大型风力发电机机组进行仿真研究,不可避免的就要建立系统的仿真模型。但是,风力发电系统的结构复杂,模型的精细程度将直接决定仿真结果。一般来说,模型越精细,仿真结果越准确,但其控制难度就越高。本文对风速模型、风力机模型、传动模型和发电机模型建模,并研究各自控制方法及控制策略;如对风力发电基本系统,包括风速、风轮、传动系统、各种发电机的数学模型进行全面分析,探索风力发电系统各个部风最通用的模型、包括了可供电网分析的各系统的简单数学模型,对各个数学模型,应用 MATLAB 软件进行了仿真。 2 风力发电机组的建模与仿真 2.1 风速模型的建立 自然风是风力发电系统能量的来源,其在流动过程中,速度和方向是不断变化的,具有很强的随机性和突变性。本课题不考虑风向问题,仅从其变化特点出发,着重描述其随机性和间歇性,认为其时空模型由以下四种成分构成:基本风速b V 、阵风风速g V 、渐变风速 r V 和噪声风速n V 。即模拟风速的模型为: n r g b V V V V V +++= (1-1) (1)基本风速在风力机正常运行过程中一直存在,基本反映了风电场平均风速的变化。一般认为,基本风速可由风电场测风所得的韦尔分布参数近似确定,且其不随时间变化,因而取为常数 (2)阵风用来描述风速突然变化的特点,其在该段时间内具有余弦特性,其具体数学公式为: 实验一:风力发电机组的建模与仿真 姓名:文福西学号:171440138 班级:0314405 一、实验目标: 1. 掌握风速模型建立实现方法; 2. 掌握风力机模型建立实现方法; 3. 掌握发电机模型建立实现方法; 二、实验内容: 在MATLAB 下的simulink 中,建立风力发电机组的仿真模型,并进行仿真研究,对仿真的结果进行分析。 三、实验原理: 本实验分四个模块分别是风速的设计,风力机模型的建立,传动系统模型的建立,发电机模型的建立。 1.风速的设计 本文不考虑风向问题,仅从其变化特点出发,着重描述其随机性和间歇性,认为其时空模型由以下四种成分构成:基本风速b V 、阵风风速g V 、渐变风速r V 和噪声风速n V 。即模拟风速的模型为: V=b V +g V +r V +n V 2.风力机模型的建立 风力机是将风能转化为机械能的重要器件。能量的转化将导致功率的下降,它随所采用的风力机和发电机的形式而异,因此,风力机的实际风能利用系数。 风力机实际得到的有用功率为: 而风轮获得的气动转矩为: 为方便定量计算,通过有关研究资料的查找,风能利用系数的值可以近似的表示: 3.传动模型的建立 传动系统的简化运动方程为: Jr 为风轮转动惯量,单位 kgm 2;n 为传动比;Jg 为发电机转动惯量,单位 kgm 2; Tg 为发电机的反转矩,单位 Nm 。 4.发电机模型的建立 发电机的反扭矩方程为: 四.实验结果和分析: 1.基本风速 模型如下: 仿真的时候假设初始风速为10m/s ,那么它的仿真图为: 分析:基本风速是作用于叶轮上的一个平均风速,是不随时间的变化而变化,可以看见输出的风速也是10m/s 。 2.阵风风速 模型如下: 仿真图为: 分析:通过仿真图可以看出阵风最大风速在6m/s ,并且在3s 左右的时候开始起风,大约在9s 左右停止。 9 9.2 9.49.69.81010.2 10.410.610.8 11 基于MATLAB的“风力发电机运行仿真” 软件设计 摘要 关键词 1前言 1.1建模仿真的发展现状 20世纪 50—60年代, 自动控制领域普遍采用计算机模拟方法研究控制系统动态过程和性能。“计算机模拟”实质上是数学模型在计算机上的解算运行, 当时的计算机是模拟计算机, 后来发展为数字计算机。1961年G.W.Morgenthler 首次对仿真一词作了技术性的解释,认为“仿真”是指在实际系统尚不存在的情况下,对于系统或活动本质的复现。目前,比较流行于工程技术界的技术定义是系统仿真是通过对系统模型的实验,研究一个存在的或设计中的系统。仿真的三要素之间的关系可用三个基本活动来描述。如图1 图1 系统仿真三要素之间的关系 20世纪50年代初连续系统仿真在模拟计算机上进行, 50年代中出现数字仿真技术, 从此计算机仿真技术沿着模拟仿真和数字仿真两个方面发展。60年代初出现了混和模拟计算机, 增加了模拟仿真的逻辑控制功能, 解决了偏微分方程、差分方程、随机过程的仿真问题。从60-70代发展了面向仿真问题的仿真语言。20世纪80年代末到90年代初, 以计算机技术、通讯技术、智能技术等为代表的信息技术的迅猛发展, 给计算机仿真技术在可视仿真基础上的进一步发展带来了契机, 出现了多媒体仿真技术。多媒体仿真技术充分利用了视觉和听觉媒体的处理和合成技术, 更强调头脑、视觉和听觉的体验, 仿真中人与计算机交互手段也更加丰富。80年代初正式提出了“虚拟现实”一词。虚拟现实是一种由计算机全部或部分生成的多维感觉环境, 给参与者产生视觉、听觉、触觉等各种感官信息, 使参与者有身临其境的感觉, 同时参与者从定性和定量综合集成的虚拟环境中可以获得对客观世界中客观事物的感性和理性的认识。图2体现 定速风电机组的仿真 组员:32111222王浩32111208 乐姗姗32111207 瞿 振林32111212 刘洁波 一、简单介绍 基于普通感应发电机的定速风电机组,一般由风轮、轴系(包括低速轴LS 高速轴HS 和齿轮箱组成)、感应发电机组等组成,如图1所示。发电机转子通过轴系与风电机组风轮连接,而发电机定子回路与电网用交流线路连接。这种类型的风电机组一旦起动,其风轮转速是不变的(取决于电网的系统频率),与风速无关。在电力系统正常运行的情况下,风轮转速随感应发电机的滑差变化。风电机组在额定功率运行状态下,发电机滑差的变化范围为1%~2%因此正常运行时 风轮转速仅在很小范围内变化。 、工作原理: 风电机组通过三叶片风轮将风能转换成机械能,风能输出的机械功率为: * = 0) 注释: 式中,Q表示空吒帶戸是通过凤力机叶片附轨速'A,心a分别均叶光速出、叶片険转半径、叶片捻转角速度;A衷小叶片扫风面积;口为功率系敦。Q与叶尖猱出入以及叶片 根据不同的取值,可得到的曲线如图2所示,从图中可以看出,对应某一确定的浆距 角,有一极大值存在,也就是说,当风力机运行时不能保证在所有的风 速下都能够产生最大的功率输出。的理论最大值为 0.593,这就是著名的Betz 极限。 Q.5i ------------------------------------------------------------------ 6 S 10 12 M 16 图2:关系曲线 定速风电机组的风轮从风中获取机械能,然后通过齿轮轴系传递给感应发电 机,感应发电机再把机械能转换成电能, 输送到电网中。感应发电机向电网提供 有功功率,同时从电网吸收无功功率用来励磁。 因为这种类型的感应发电机无法 控制无功功率,所以利用无功补偿器来改善风电机组的功率因数, 降低机组从电 网中吸收的总的无功功率。现代定速风电机组的风轮转速为 15~20r/min ,发电 机转子的同步转速与电网频率对应。 定速风电机组可以采用定浆距控制, 也可以采用叶片角控制。其中,定浆距 控制风电机组为被动失速控制,它将叶片以固定浆距角用螺栓固定在轮毂上,在 给定风速下,风电机组风轮开始失速,失速条件始于叶片根部,并随着风速加大 逐渐发展到全部叶片长度。这种失速控制方式成本低廉,但是低风速下风电机组 发电效率较低。而叶片角控制定速风电机组为采用负浆距角的主动失速控制方式。 主动失速设置为在风速低于额定风速时优化处理,在风速超过额定风速时限制出 Tubwie Puma CtEiiKLciislics aigfc bc*a _ 0 0 02 04 0G OB 1 12 1.4 Tuitme speed (pi 定速风电机组的仿真 组员: 32111222王浩 32111208乐姗姗 32111207瞿振林 32111212刘洁波 一、简单介绍 基于普通感应发电机的定速风电机组,一般由风轮、轴系(包括低速轴LS、高速轴HS和齿轮箱组成)、感应发电机组等组成,如图1所示。发电机转子通过轴系与风电机组风轮连接,而发电机定子回路与电网用交流线路连接。这种类型的风电机组一旦起动,其风轮转速是不变的(取决于电网的系统频率),与风速无关。在电力系统正常运行的情况下,风轮转速随感应发电机的滑差变化。风电机组在额定功率运行状态下,发电机滑差的变化范围为1%~2%,因此正常运行时风轮转速仅在很小范围内变化。 图 1:基于普通感应发电机的定速风电机组 二、工作原理: 风电机组通过三叶片风轮将风能转换成机械能,风能输出的机械功率为: 注释: 根据不同的取值,可得到的曲线如图2所示,从图中可以看出,对应某一确 定的浆距角,有一极大值存在,也就是说,当风力机运行时不能保证在所有的风速下都能够产生最大的功率输出。的理论最大值为0.593,这就是著名的Betz 极限。 图2:关系曲线 图 3:风电机组功率特性 定速风电机组的风轮从风中获取机械能,然后通过齿轮轴系传递给感应发电机,感应发电机再把机械能转换成电能,输送到电网中。感应发电机向电网提供有功功率,同时从电网吸收无功功率用来励磁。因为这种类型的感应发电机无法控制无功功率,所以利用无功补偿器来改善风电机组的功率因数,降低机组从电网中吸收的总的无功功率。现代定速风电机组的风轮转速为15~20r/min,发电机转子的同步转速与电网频率对应。 定速风电机组可以采用定浆距控制,也可以采用叶片角控制。其中,定浆距控制风电机组为被动失速控制,它将叶片以固定浆距角用螺栓固定在轮毂上,在给定风速下,风电机组风轮开始失速,失速条件始于叶片根部,并随着风速加大逐渐发展到全部叶片长度。这种失速控制方式成本低廉,但是低风速下风电机组 实验一 :风力发电机组的建模与仿真 姓名: 学号: 一、实验目标: 1.能够对风力发电机组的系统结构有深入的了解。 2.能熟练的利用MATLAB 软件进行模块的搭建以及仿真。 3.对仿真结果进行研究并找出最优控制策略。 二、实验类容: 对风速模型、风力机模型、传动模型和发电机模型建模,并研究各自控制方法及控制策略;如对风力发电基本系统,包括风速、风轮、传动系统、各种发电机的数学模型进行全面分析,探索风力发电系统各个部风最通用的模型、包括了可供电网分析的各系统的简单数学模型,对各个数学模型,应用 MATLAB 软件进行了仿真。 三、实验原理: 风力发电系统的模型主要包括风速模型、传动系统模型、发电机模型和变桨距模型,下文将从以上几方面进行研究。 1、风速的设计 自然风是风力发电系统能量的来源,其在流动过程中,速度和方向是不断变化的,具有很强的随机性和突变性。本文不考虑风向问题,仅从其变化特点出发,着重描述其随机性和间歇性,认为其时空模型由以下四种成分构成:基本风速b V 、阵风风速 g V 、渐变风速 r V 和噪声风速 n V 。 即模拟风速的模型为: V=b V +g V +r V +n V (1-1) (1). 基本风b V =8m/s Step Scope 基本风仿真模块 (2)阵风风速 ? ?? ??=0 cos v g V g g g g g g T t t T t t t t t +>+<<<1111 (1-2) 式中: ??? ? ????--= )(2cos 121max cos g g g T t T t G v π (1-3) t 为时间,单位 s ;T 为阵风的周期,单位 s ;cos v ,g V 为阵风风速,单位m /s ;g t 1为阵风开始时间,单位 s ;max G 为阵风的最大值,单位 m/s 。 Step1 Step Scope1 Product AND Logical Operator f(u) Fcn 3Cons tant Clock 本例中,阵风开始时间为 3 秒,阵风终止时间为 9 秒,阵风周期为 6 秒,阵风 最大值为 6m/s 。 (3)渐变风速 r V 渐变风用来描述风速缓慢变化的特点,其具体数学公式如下: ??? ??=0 0v ramp r V r r r r t t t t t t t 2211><<< (1-4) 式中: ??? ? ? ?--- =r r r ramp t t t t R v 212max 1 (1-5) r t 1为渐变风开始时间,单位 s ;r t 2为渐变风终止时间,单位 s ;r V ,ramp v 为不同时刻渐变风风速,单位 m/s ;max R 为渐变风的最大值,单位 m/s 。 Step4 Step3 Scope3 Product1 AND Logical Operator f(u) Fcn1 10Cons tant1 Clock 1 (4)噪声风速 n V 选择一个随机噪声模块就可以 尾流对风力发电机组的影响 作者:雷启龙、黄瑞芳、李高峰 黄瑞芳工作单位:内蒙古电力工程技术研究院内蒙古邮编: 010010 雷启龙、李高峰工作单位:国华(河北)新能源有限公司邮编: 076750 摘要:由于大型风电场风力发电机组数量众多,占地面积较大,风力发电机组间尾流效应将对风电场并网点输出特性有较大的影响。以定速机组风电场为例,在电磁暂态仿真软件PSCAD/EMTDC平台上,搭建了25台750kW风电机组组成的风电场模型。分析结果表明,尾流效应会造成风电场的风能损失。在风电场接入电网检测中,需要考虑尾流效应的影响。(文章题目主要是想说尾流对单个风力发电机组的影响,比如对叶片、对变桨控制、对机组振动、对其他自动控制等影响正常运行的分析) 关键词:风电场;风力发电机组;尾流效应;输出特性 1 引言 随着风电技术的快速发展,以及风力发电在电力系统中比重的持续增加,大型风电场通常由几百台甚至上千台风电机组组成。为准确分析大型风电场的动态行为,机组间尾流效应值得关注。 当研究风电场等值模型或风电场对电力系统的影响时,通常假定风电场内所有风电机组的风速相同。实际上,当风吹过风力机时会损失部分能量,表现为风速的降低。在风电场中,前面的风电机组要遮挡后面的风电机组,因此,处于下风向风电机组的风速小于上风向风电机组的风速。风电机组相距越近,前面风电机组对后面风电机组风速的影响越大,这种现象称为尾流效应。 以5排、每排间距为400m的风电场为例,假定风速为8m/s,风穿过整个风电场的时间至少需要3min。因此,尾流效应将对风电场输出特性有重要的影响。国家电网公司于2009年2月颁布了风电场接入电网技术规定。技术规定中给出了风电场接人电网的技术要求,对风电场最大功率变化率和风电场并网点电压偏差以及风电场接人电网检测有了明确规定。在风电场接入电网检测中,需要尾流效应对风电场并网点特性的影响。 鉴于此,本文以PSCAD/EMTDC为研究平台,搭建了25台定速风电机组组 基于MATLAB 的风力发电机组的建模与仿真 学号:xxxxxxx 姓名:xxx 分数: (xxxxxxxxxxxxxxxxxxxxxxxxxxxxxx) 摘要:本文在风力发电机组监测与控制实验的基础上,总结了风力发电机组的建模技术,并对整个系统建立了MATLAB 仿真模型。仿真结果证明,系统输出的功率波形与输入的风速有关,风能利用系数比较低,发电量不足且输出不稳定。 关键词:MATLAB ;风力发电系统;仿真研究 1 引言 对大型风力发电机机组进行仿真研究,不可避免的就要建立系统的仿真模型。但是,风力发电系统的结构复杂,模型的精细程度将直接决定仿真结果。一般来说,模型越精细,仿真结果越准确,但其控制难度就越高。本文对风速模型、风力机模型、传动模型和发电机模型建模,并研究各自控制方法及控制策略;如对风力发电基本系统,包括风速、风轮、传动系统、各种发电机的数学模型进行全面分析,探索风力发电系统各个部风最通用的模型、包括了可供电网分析的各系统的简单数学模型,对各个数学模型,应用 MATLAB 软件进行了仿真。 2 风力发电机组的建模与仿真 2.1 风速模型的建立 自然风是风力发电系统能量的来源,其在流动过程中,速度和方向是不断变化的,具有很强的随机性和突变性。本课题不考虑风向问题,仅从其变化特点出发,着重描述其随机性和间歇性,认为其时空模型由以下四种成分构成:基本风速b V 、阵风风速g V 、渐变风速 r V 和噪声风速n V 。即模拟风速的模型为: n r g b V V V V V +++= (1-1) (1)基本风速在风力机正常运行过程中一直存在,基本反映了风电场平均风速的变化。一般认为,基本风速可由风电场测风所得的韦尔分布参数近似确定,且其不随时间变化,因而取为常数 (2)阵风用来描述风速突然变化的特点,其在该段时间内具有余弦特性,其具体数学公式为: 定速风电机组的仿真 组员:王浩乐姗姗 瞿振林刘洁波 一、简单介绍 基于普通感应发电机的定速风电机组,一般由风轮、轴系(包括低速轴LS、高速轴HS和齿轮箱组成)、感应发电机组等组成,如图1所示。发电机转子通过轴系与风电机组风轮连接,而发电机定子回路与电网用交流线路连接。这种类型的风电机组一旦起动,其风轮转速是不变的(取决于电网的系统频率),与风速无关。在电力系统正常运行的情况下,风轮转速随感应发电机的滑差变化。风电机组在额定功率运行状态下,发电机滑差的变化范围为1%~2%,因此正常运行时风轮转速仅在很小范围内变化。 图 1:基于普通感应发电机的定速风电机组 二、工作原理: 风电机组通过三叶片风轮将风能转换成机械能,风能输出的机械功率为:注释: 根据不同的取值,可得到的曲线如图2所示,从图中可以看出,对应某一确定的浆距角,有一极大值存在,也就是说,当风力机运行时不能保证在所有的风速下都能够产生最大的功率输出。的理论最大值为0.593,这就是著名的Betz 极限。 图2:关系曲线 图 3:风电机组功率特性 定速风电机组的风轮从风中获取机械能,然后通过齿轮轴系传递给感应发电机,感应发电机再把机械能转换成电能,输送到电网中。感应发电机向电网提供有功功率,同时从电网吸收无功功率用来励磁。因为这种类型的感应发电机无法控制无功功率,所以利用无功补偿器来改善风电机组的功率因数,降低机组从电网中吸收的总的无功功率。现代定速风电机组的风轮转速为15~20r/min,发电机转子的同步转速与电网频率对应。 定速风电机组可以采用定浆距控制,也可以采用叶片角控制。其中,定浆距控制风电机组为被动失速控制,它将叶片以固定浆距角用螺栓固定在轮毂上,在给定风速下,风电机组风轮开始失速,失速条件始于叶片根部,并随着风速加大逐渐发展到全部叶片长度。这种失速控制方式成本低廉,但是低风速下风电机组发电效率较低。而叶片角控制定速风电机组为采用负浆距角的主动失速控制方式。主动失速设置为在风速低于额定风速时优化处理,在风速超过额定风速时限制出力为额定功率。这种主动失速控制方式能够提高风电机组的发电效率。 三、仿真模块: Three-Phase Source【三相电源模块】 Three-Phase Transformer(Two Windings)【三相双绕组变压器模块】 Three-Phase Fault【三相故障模块】 Three-Phase PI Section Line【三相π型等值电路模块】 基于MATLAB 的风力发电机组的建模与仿真学号:xxxxxxx 姓名:xxx 分数: (xxxxxxxxxxxxxxxxxxxxxxxxxxxxxx) 摘要:本文在风力发电机组监测与控制实验的基础上,总结了风力发电机组的建模技术,并对整个系统建立了MATLAB 仿真模型。仿真结果证明,系统输出的功率波形与输入的风速有关,风能利用系数比较低,发电量不足且输出不稳定。 关键词:MATLAB;风力发电系统;仿真研究 1引言 对大型风力发电机机组进行仿真研究,不可避免的就要建立系统的仿真模型。但是,风力发电系统的结构复杂,模型的精细程度将直接决定仿真结果。一般来说,模型越精细,仿真结果越准确,但其控制难度就越高。本文对风速模型、风力机模型、传动模型和发电机模型建模,并研究各自控制方法及控制策略;如对风力发电基本系统,包括风速、风轮、传动系统、各种发电机的数学模型进行全面分析,探索风力发电系统各个部风最通用的模型、包括了可供电网分析的各系统的简单数学模型,对各个数学模型,应用MATLAB 软件进行了仿真。 2风力发电机组的建模与仿真 2.1风速模型的建立 自然风是风力发电系统能量的来源,其在流动过程中,速度和方向是不断变化的,具有很强的随机性和突变性。本课题不考虑风向问题,仅从其变化特点出发,着重描述其随机性和间歇性,认为其时空模型由以下四种成分构成:基本风速b V 、阵风风速g V 、渐变风速r V 和噪声风速n V 。即模拟风速的模型为: n r g b V V V V V +++=(1-1) (1)基本风速在风力机正常运行过程中一直存在,基本反映了风电场平均风速的变化。一般认为,基本风速可由风电场测风所得的韦尔分布参数近似确定,且其不随时间变化,因而取为常数 (2)阵风用来描述风速突然变化的特点,其在该段时间内具有余弦特性,其具体数学公式为: 风力发电机组仿真平台的建设 3.建设方案 3.1 建设目标 风力发电机组仿真平台建设目标如下: (1)构建以风电机组总体设计平台为核心的风力发电机组设计仿真系统,该系统贯穿风电机组参数选择、总体设计、详细设计整个过程,包括风力发电机组性能分析、载荷计算、结构强度分析模块。 (2)建立风力发电机组控制系统半物理仿真系统,在该系统中控制器及相关的机械结构为实物,而风力发电机组其他部件以及风场环境采用数学仿真代替。 (3)建立适用于我国气候和地形环境的风资源评估仿真系统。 (4)建立风力发电机组运行仿真系统。该系统包括风能特性仿真、风力发电机组仿真、风电场仿真、风电场接入电力系统仿真的功能。 基于上述仿真系统,结合具体风电场项目,实施风力发电系统仿真,发展我国风电行业仿真技术。 3.2 建设内容 3.2.1 风力发电机组设计仿真系统 (1)逻辑结构 风力发电机组设计仿真系统以风力发电机组总体设计软件平台为核心,该软件平台以完成方案的总体设计为目标,因此各项功能均围绕设计对象展开。系统内部逻辑结构如图所示,具体含义如下: ① 设计对象、设计状态与设计分析构成一个三元关联关系,设计分析针对设计对象每一个由设计状态所确定的设计点进行处理运算; ② 设计分析所依赖的手段既包括各种商业软件,也包括总体设计部门自主开发或引进的各种设计方法; ③ 在设计对象各种设计状态的设计分析的基础上,结合若干条件即可进行设计方案的优化,通过开发的专用接口可连接已有的外部优化框架软件方便的进行各系统设计优化; ④ 智能化设计支持可以在需要的时候为设计人员提供备选的建议以供参考,辅 助进行风力发动机组总体方案设计工作以及决策。 图43 软件平台系统逻辑结构 (2)系统框架 软件平台的系统框架如图所示。软件平台以底层数据库和资料库子系统为数据基础,通过开放式设计平台框架将总体方案设计、性能分析、综合优化以及专家辅助支持等功能有机集成,形成统一的面向风力发电机组总体方案的平台。 ICS点击此处添加ICS号 点击此处添加中国标准文献分类号 中华人民共和国能源行业标准 NB/T XXXXX—XXXX 风电场电气仿真模型建模及验证规程Electrical Simulation Models and Validation for Wind Farm “在提交反馈意见时,请将您知道的相关专利连同支持性文件一并附上” (工作组讨论稿) 201X-XX-XX发布XXXX-XX-XX实施 国家能源局发布 目次 前言.................................................................................................................................................................. III 1 范围 (1) 2 规范性引用文件 (1) 3 术语和定义 (1) 4 总则 (2) 5 风电场电气仿真模型 (2) 6 风电场电气仿真模型验证 (5) 7 风电场电气仿真模型报告主要内容 (7) 参考文献 (9) 前言 本标准根据国家能源局下达的国能科技[2011]252号《2011年第二批能源领域行业标准制(修)订计划》标准计划修订。 本标准规定了电力系统稳定分析用风电场电气仿真模型及验证要求,适合在广泛使用的电力系统稳定计算程序中应用。 本标准由提出归口。 本标准主要起草单位:中国电力科学研究院。 本标准主要起草人: 风电场电气仿真模型建模及验证规程 1 范围 本标准规定了电力系统稳定分析计算用的风电场电气仿真模型的建模及验证。 本标准适用于接入110(66)kV及以上电压等级电力系统的风电场电气仿真模型建模。 2 规范性引用文件 下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。 GB/T 19963-2011 风电场接入电力系统技术规定 NB/T XXXX 风电机组低电压穿越建模及验证方法 NB/T XXXX 风电场低电压穿越建模及验证方法 3 术语和定义 下列术语和定义适用于本标准。 3.1 风电场 wind farm 由一台或多台风电机组(包括机组单元变压器)、汇集线路、升压变压器、风电场控制及其他辅助设备组成的发电站。 3.2 风电机组额定功率 rated power (for wind turbines) 风电机组连续稳定运行在额定工况时输出的有功功率。 3.3 风电场有功功率 active power of wind farm 风电场输入到并网点的有功功率。 3.4 风电场无功功率 reactive power of wind farm 风电场输入到并网点的无功功率。定速风电机组的仿真报告
最新基于MATLAB的风力发电机组的建模与仿真
风力发电机组的建模与仿真
风力发电机运行仿真
定速风电机组的仿真
定速风电机组的仿真(内容参考)
基于matlab的风力发电机组的建模与仿真
尾流对风力发电机组的影响
基于MATLAB的风力发电机组的建模与仿真
定速风电机组的仿真
基于MATLAB的风力发电机组的建模与仿真
风力发电机组仿真平台的建设
200-风电场电气仿真模型建模及验证规程V2
相关主题
文本预览