第二讲:标准模架及其他标准件的介绍与订购 一、国内(特别是珠江三角洲)采用最多的标准模架的厂商: 1、龙记(LKM)用得最多.; 2、科达; 3、富得巴; 4、明利; 二、注塑模具标准模架的分类: 1、大水口(二板模)标准模架; 2、细水口(三板模/小水口)标准模架:(1)标准型;(2)简化型; 注意:还可依据其外型把标准模架分为:直身模或者工字型模,主要用“工字型模”注:模胚15—25模胚用CI型号,27—40模胚用CT型号(注:40模胚如果框深超过40以上才开CH模胚)45以上模胚开CH型号。 三、常用材质:王牌料(S50C/S55C) 四、大水口模架组成部分与订购:
1、模架型号中几个字母的区别如下: 1)前面四个字母ABCD的区别: A:代表在后模板下方有一个托板U板,一般适合后模板开通框和后模仁做大镶件时。 B:代表在后模板下方有一个托板U板,而且在A和B之间有一个顶出板S板,一般适合后模板开通框和后模仁做大镶件时和透明塑件或薄壁深腔模时。 C:代表最简单最常用的一种,没有托板和顶出板,一般适合不是透明塑件或薄壁深腔模及后模不开通框。 D:代表在在A和B之间有一个顶出板S板,一般适合透明塑件或薄壁深腔模时。 2)后面三个字母IHT的区别: I:代表工字模。(常用) H和T:代表都是直身模,H比T少一个板叫面板或上固定板(T板) 2、订购大水口模架所需五大尺寸: 模具总宽,总长,A\B\C三板的厚度 另外:A和B板之间隔空1mm,有两个作用,一是有利于分模面的排气和不走毛边,靠基准角的一套导柱导套向模具的长度内侧偏移了2mm,是为了防止装模板时装反从而保护型芯不损伤。 例如:LKM CI 2530 A50 B60 C80 五、细水口模架组成部分与订购: 1、模架型号中几个字母的区别如下: 1)前面两个字母的区别: D和E的区别,D代表是三板模,有水口板即R板;而E代表是二板半模没有水口板即R板。 2)中间四个字母ABCD的区别: A:代表在后模板下方有一个托板U板,一般适合后模板开通框和后模仁做大镶件时。 B:代表在后模板下方有一个托板U板,而且在A和B之间有一个顶出板S板,一般适合后模板开通框和后模仁做大镶件时和透明塑件或薄壁深腔模时。 C:代表最简单最常用的一种,没有托板和顶出板,一般适合不是透明塑件或薄壁深腔模及后模不开通框。 D:代表在在A和B之间有一个顶出板S板,一般适合透明塑件或薄壁深腔模时。 3)后面两个字母I和H的区别: I:代表工字模。(常用) H代表都是直身模。 3)上图中左边为标准细水口模架,右边为简化型细水口模架,区别在于简化型少了A
变量表达式说明 AP_h A板厚度 AP_off=fix_open A板偏离=定模离空 BCP_h B板厚度 BP_off=S_off+supp_s*S_h B板偏离=推板偏离+有无推板*推板厚度 CP_h C板高度 CP_off=U_off+supp_u*U_h C板偏离=托板偏离+有无托板*托板厚度 CS_d C板螺钉直径 C_w C板宽度 Cl_off_x=-(mold_w/2)+C_w/2 左边C板X向偏离=-半模板宽+半C板宽度 Cr_off_x=mold_w/2-C_w/2 右边C板X向偏离=半模板宽-半C板宽度 EF_w 顶出板宽度 EJA_h 面针板厚度 EJA_off=EJB_off-EJA_h-4*ETYP E 面针板偏离=底针板偏离-面针板厚度-4*ETYPE EJB_h 底针板厚度 EJB_off=BCP_off-EJB_h-EJB_open 底针板偏离=底板偏离-底针板厚度-底针板离空(垫钉高) EJB_open=0 底针板离空(垫钉高) ES_d 面、底针板固定螺钉直径 ETYPE=0 顶针固定形式:=0沉孔固定;=1面、底针板离空固定 GP_d 导柱直径 GTYPE=1 导柱位置:=1在A板;=0在B板 H 直身模顶板宽度 I 工边模顶板宽度 Mold_type=I 模架类型=工边模架 PS_d 定模、动模螺钉直径=M1 RP_d 回针(复位杆)直径 R_h 水口板(弹料板)厚度 R_height=supp_r*R_h 弹料板高度=有无弹料板*弹料板厚度 R_off=AP_off+AP_h 弹料板偏离=A板偏离+A板厚度 SG=0 模架形式:SG=0为大水口,SG=1为小水口模架 SPN_L=floor(ok_spn::L) 拉杆长度 SPN_TYPE=0 拉杆位置形式:=0拉杆位置在外;=1拉杆位置在内 SPN_d 拉杆直径=20 S_h 推板厚度 S_height=if(supp_s!=0)(supp_s*S_h)else(S_h) 推板高度=如(无推板)(有无推板*推板厚度)其余(推板厚度) S_off=move_open 推板偏离= 动模离空 TCP_h 顶板厚度 TCP_off=R_off+supp_r*R_h 顶板偏离=弹料板偏离+有无弹料板*弹料板厚度 TCP_off_z=TCP_off 顶板偏离Z值=顶板偏离 TCP_top=TCP_off+TCP_h 顶板顶面=顶板偏离+顶板厚度 TW=Mold_type 顶板宽度=模身类型 T_height=supp_t_plate*TCP_h 顶板高=有无顶板*顶板厚度
模具是制造模型的工具,按特定形状去成型具有一定形状和尺寸的制品的工具。模具技术在制造业中占用很高的地位。对于我们产品设计人员来说,模具在工作中频繁出现,与我们的工作内容关系紧密,因为我们设计出来的产品零件很多需要通过模具来实现,对于模具知识的掌握是必不可少的。 模具(注射模)组成:成型部分、浇注系统、导向机构、脱模装置、侧向分型抽芯机构、温度调节和排气系统和标准模架。 一,标准模架结构简述 不同产品零件所需要的模具不一样,而模具结构又有很多相同的结构,所以为了更加效率地做出模具,人们开始使用一些标准模架,标准模架构成了模具的骨架,只要换成不同的匹配模仁,就能成型不同的零件,对于整个模具来说,就有三个部分组成:前模板、后模板和模仁,当然,一套模具是相当复杂的,这里只是介绍模具的骨架--标准模架。 1,标准模架的分类 对于塑胶模具,按照基本结构分类,一般分为二板模式模具(大水口)和三板式模具(细水口),其中三板式模具又可以细分为细水口模具和简化型细水口模具,对应的就有大水口模架、细水口模架和简化型细水口模架。 2,模架的基本结构(以二板模CI型为例) 由上图可以看出标准模架的组成 (1),板子部分:前模底板、后模底板、前模板、后模板、上顶出板、下顶出板、两个模脚。 前后模底板:分别要和注塑机上面的定模扳和动模板固定在一起。 前后模板:两个模仁就是要镶嵌在两个模板里面。 上下顶出板:注塑机上面的合模系统中的顶出机构会顶住这两块板,进而将塑件顶出。 模脚:为零件的顶出支撑出一定的空间。 (2),固定螺钉部分:前模固定螺钉,、后模板固定螺钉、顶出板锁紧螺钉、模脚固定螺钉。(3),辅助零部件:导柱与导套、回针。
When the lives of employees or national property are endangered, production activities are stopped to rectify and eliminate dangerous factors. (安全管理) 单位:___________________ 姓名:___________________ 日期:___________________ 2021年论我国机械自动化技术的发展应该注重的几个问题
2021年论我国机械自动化技术的发展应该注 重的几个问题 导语:生产有了安全保障,才能持续、稳定发展。生产活动中事故层出不穷,生产势必陷于混乱、甚至瘫痪状态。当生产与安全发生矛盾、危及职工生命或国家财产时,生产活动停下来整治、消除危险因素以后,生产形势会变得更好。"安全第一" 的提法,决非把安全摆到生产之上;忽视安全自然是一种错误。 随着科技的发展,特别是智能化空前发展,目前机械自动化已经取代了人力劳动,但是我国机械自动化发展还存在一些问题需要解决。本文围绕我国机械自动化技术的特点、作用、存在的问题以及发展必要性、发展途径这几个方面进行探讨,希望能够提供一些借鉴和参考。 机械自动化的应用,可以提高生产过程的安全性。我国处于机械自动化的初期,需要循序渐进,不断努力,它们在工业中起到很大的作用,很多方面机械自动化的特点与作用相辅相成,需创造条件,向节约型工业化自动化社会努力。 我国机械自动化存在的问题 我国机械自动化技术起步较晚,且目前世界机械制造行业在自动 化技术方面还是以欧美发达国家的生产水平为准,包括我国在内的发 展中国家基本还处于机械自动化的实现阶段,这是一个长期的过程。 1.1.手工劳作比例高
自动化科学技术的发展史 —自动化科学与技术的产生与发展 关键词:自动化技术发展 摘要:从古至今,劳动人民在经过长期生产和生活后﹐为了减轻自己的劳动﹐逐渐产生利用自然界动力代替人力畜力﹐以及用自动装置代替人的部分繁难的脑力活动的愿望﹐经过漫长岁月的探索﹐他们互不相关地造出一些原始的自动装置。而这些装置在随着知识和社会的进步中,断地得到提升,不仅节省了劳动力,解放生产力,还提高了了生产效率,好地实现了工业化流水线生产,并且有些能够在预先的编程设定后可以智能的解决一些问题,效地降低了生产成本。 1.引言 自动化(Automation)是指机器设备、系统或过程(生产、管理过程)在没有人或较少人的直接参与下,按照人的要求,经过自动检测、信息处理、分析判断、操纵控制,实现预期的目标的过程。自动化技术广泛用于工业、农业、军事、科学研究、交通运输、商业、医疗、服务和家庭等方面。采用自动化技术不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能扩展人的器官功能,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。因此,自动化是工业、农业、国防和科学技术现代化的重要条件和显著标志。 2.自动化技术及应用的发展经历 2.1自动化技术形成时期(18世纪末至20世纪30年代) 社会的需要是自动化技术发展的动力。自动化技术是紧密围绕着生产﹑军事设备的控制以及航空航天工业的需要而形成和发展起来的。工业上的应用,是以瓦特的蒸汽机瓦特的蒸汽机瓦特的蒸汽机瓦特的蒸汽机调速器作为正式起点。1788年﹐瓦特为了解决工业生产中提出的蒸汽机的速度控制问题﹐把离心式调速器与蒸汽机的阀门连接起来﹐构成蒸汽机转速调节系统﹐使蒸汽机变为既安全又实用的动力装置。此时的自动化装置是机械式的,而且是自力型的。 2.2自动化技术及应用的发展经历 自动化技术及应用的发展经历了三个重要的里程碑: 里程碑是1788年英国机械师watt在发明蒸汽机的同时发明的蒸汽离心式调节器。第一次出现被控量的自动调节。 第二个里程碑是20世纪20年代电子管反馈放大器的诞生,各种电子式控制器在各种机
制造自动化技术的发展历程和前景 自动化(Automation)是指机器设备、系统或过程(生产、管理过程)在没有人或较少人的直接参与下,按照人的要求,经过自动检测、信息处理、分析判断、操纵控制,实现预期的目标的过程。自动化技术广泛用于工业、农业、军事、科学研究、交通运输、商业治疗、服务和家庭等方面。采用自动化技术不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能扩展人的器官功能,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。因此,自动化是工业、农业、国防和科学技术现代化的重要条件和显著标志。 自动化是美国科学家哈德在1936年提出的。他认为在一个生产过程中,机器之间的零件转移不用人区搬运就是自动化,这就是早期自动化的概念。制造自动化概念是一个动态发展的过程,在过去一段时间内人们认为自动化使用机器代替人的体力劳动能够只能完成指定的作业,但是随着科技不断地进步,计算机技术的不断发展和应用,制造自动化的功能目标不再是仅仅代替人的部分脑力劳动去自动完成指定的作业。随着制造技术.电子技术.信息技术.管理技术等发展,制造自动化已经远远突破上述传统的概念。二十世纪以来,为了实现自动化,人们研究和制造了成千上万种自动控制系统,极大地推动了生产劳动、社会服务、
军事工程和科学研究等活动。自动控制系统通常由控制器、执行机构和信息反馈装置三部分组成。反馈装置的任务是监视和测量执行机构和工作对象的状态变化和执行结果,把这些信息反馈给控制器。控制器则根据任务的定义和当前执行情况决定以后应该采取的措施,以机械的、光电的或其他的物理方式向执行机构发出指令,以便后者准确地加以执行。 第二次世界大战以来的四十多年中,特别是六十年代以后,在发达国家和很多发展中国家,人们的生产方式和生活方式都发生了巨大的变化。这种变化最重要的标志是,在社会劳动时间不断缩减的情况下,社会劳动生产率和人均国民收入都增长了大约十倍,人的平均寿命大大延长。促成这种急剧变化的主要原因是科学技术的进步,所以普遍认为人类正在经历着一场新的技术革命。在科学技术领域里对新技术革命贡献最大的是两个相互联系紧密的领域:一是信息技术(微电子技术、计算机技术和通信技术等)的重大突破;二是系统科学的概念、理论和方法的工程化应用。前者是后者得以成功的物资基础,后者又为前者的发展开辟了道路制造自动化的发展与技术发展密切相关,其生产模式也经历了五个阶段。第一阶段:刚性自动化阶段。这一阶段包括单机自动线和刚性自动线,在上世纪四五十年代这个技术已经相当成熟,在这一阶段中应用传统的机械设计与制造工艺方法,其特征是高生产率和刚性结构,很难实现生产产品
工业自动化未来的发展方向 工业自动化就是工业生产中的各种参数为控制目的,实现各种过程控制,在整个工业生产中,尽量减少人力的操作,而能充分利用动物以外的能源与各种资讯来进行生产工作,即称为工业自动化生产,而使工业能进行自动生产之过程称为工业自动化。 概述 工业自动化是机器设备或生产过程在不需要人工直接干预的情况下,按预期的目标实现测量、操纵等信息处理和过程控制的统称。自动化技术就是探索和研究实现自动化过程的方法和技术。它是涉及机械、微电子、计算机、机器视觉等技术领域的一门综合性技术。工业革命是自动化技术的助产士。正是由于工业革命的需要,自动化技术才冲破了卵壳,得到了蓬勃发展。同时自动化技术也促进了工业的进步,如今自动化技术已经被广泛的应用于机械制造、电力、建筑、交通运输、信息技术等领域,成为提高劳动生产率的主要手段。[1] 随着我国制造厂商对自动化程度的提高,制造业生产线开始趋向个性化,单一检测数据的仪器组成的检测环节需要投入大量的人力物
力,不适应快速检测。因此,集合多种检测功能的快速自动检测设备才是客户真正所需要的,快速自动检测仪是一种“非标测试设备”,需要对客户生产线进行深入的需求调查,量身定制检测方案,因此被称之为“定制检测”,“定制检测”在工业自动化快速检测中起到重要作用。 自动化技术作为20世纪工业领域中最重要的技术之一,主要解决的是生产效率和一致性问题。无论是追求高速、连续和大批量的大型企业,还是追求灵活、柔性的定制化的中心企业,都依赖自动化技术的应用。当今世界已经从产品经济过度到服务经济,过度到一个需要客户体验的时代——大规模定制,也就是快速大批量制造符合个性需求的产品,已经成为世界级的发展趋势。这就需要生产企业的具有很高的自动化水平来解决效率和柔性的矛盾。自动化技术与现代工业企业的关系已经远远超越了为企业提高效益的范畴,而是成为企业赖以生存和发展的基础之一。 技术简介 工业自动化技术是一种运用控制理论、仪器仪表、计算机和其他信息技术,对工业生产过程实现检测、控制、优化、调度、管理和决策,达到增加产量、提高质量、降低消耗、确保安全等目的综合性高技术,包括工业自动化软件、硬件和系统三大部分。工业自动化
备模架图尺寸标注: 7.1.1 模架图标出结构:包括模仁框、模仁束滑块、滑块槽及滑块压板槽、定位 束块框、零度束滑块。有热胶道系统时母模板背面的热流板框 出线沟及可以用铣床加工的部分。 7.1.2 备模架图涉及的公差内容: 7.1.3 如果顶针板数量为3块板以上(含3块)者,则除了最上方的上顶出板不需 另外加注厚度公差外,其余的顶出板厚度公差均为±0.01,外框则为± 0.02。 7.1.4 其余各板的模板厚度及外框尺寸如未另外加注公差尺寸,皆以两位小数 (公差±0.02)标注。 7.1.5 模板上其它的加工深度,可在公、母模侧的平面图上使用文字说明,
如下图所示: 7.2 模板细部图标注 7.2.1 模板标注时,须将零点定义在模板的底部(附图1),所有螺丝孔、顶针 孔及水路的相关尺寸,均为一位小数 7.2.2 模板标注时涉及公差有模仁外框尺寸公差为+0.01 0 深度尺寸公差为+0.01 模板 的厚度公差为±0.01。 7.2.3 模板上标注顶针孔时,须注意到顶针的位置尺寸除斜销顶针为2位小数 〈X.XX公差为±0.02〉外,其余均为1位小数〈X.X公差为±0.10〉。7.2.4 在标示顶针孔的让位时,须依照顶针规格进行调整:当∮X.XX≦∮3.0时, 则让位孔∮径加大0.5mm,当∮X.XX>∮3.0时,则让位孔∮径加大1.0mm。 即∮3.0孔做∮3.5,∮4.0的孔做∮5.0。 7.2.5 如果成品面为曲面时,顶针需做限位处理时,如下图所示:
具体尺寸须按图标注。 7.2.6 模板上标注斜销顶针的注意重点: >1. 斜销顶针类型: >1.1 普通顶针。 >1.2 T形槽的顶针。 >2. 在公模板的位置尺寸标示为2位小数〈X.XX〉,其逃孔方式有以下几种情况: >3. 这种标注的方式主要是针对模板有足够厚度时的表示法,如果模板高度不足时顶针孔就全部做成精孔〈公差为X.XX+0.01 〉。 -0
论机械自动化技术及其在我国的发展 摘要:本文对机械自动化的产生及在我国的现状做了概述,在此基础上探索了我国机械自动化的发展之路。 关键词:机械自动化;现状;发展 引言 机械自动化,主要指在机械制造业中应用自动化技术,实现加工对象的连续自动生产,实现优化有效的自动生产过程,加快生产投入物的加工变换和流动速度。机械自动化技术的应用与发展,是机械制造业技术改造、技术进步的主要手段和技术发展的主要方向。机械自动化的技术水准,不仅影响整个机械制造业的发展,而且对国民经济各部门的技术进步有很大的直接影响。 一、机械自动化的产生 机械自动化技术从上个世纪20年代首先在机械制造冷加工大批量生产过程中开始发展应用,上世纪60年代后为适应市场的需求和变化,为增强机械制造业对市场灵活快速反应的能力,开始建立可变性自动化生产系统,即围绕计算机技术的柔性自动化。它是在制造系统不变或变化较小的情况下,机器设备或生产管理过程通过自动检测、信息处理、分析判断自动地实现预期的操作或某种过程,并能够自动地从制造一种零件转换到制造另一种不同的零件。社会实践证明,这种定义下的制造系统自动化与当代大多数企业的实际不相容。目前,世界各国的机械自动化水准除少数工业发达国家的某些生产部门外,大多数还处于操作阶段的自动化。我国也不例外,需要循序渐进,不断努力,创造条件,向自动化的高级理想阶段迈进。 二、我国机械自动化的现状 机械自动化技术从上个世纪20年代开始发展应用以来,已经得到了迅速的发展,特别是近年来计算机的高度集成化,开始采用了计算机集成制造系统,大大加快了机械自动化的发展,但我国仍处于初级操作阶段的自动化。目前,世界各国的机械自动化水准除少数工业发达国家的某些生产部门外,大多数还处于操作阶段的自动化。我国也不例外,我国的产业结构层次低。我国机械制造业目前有11.4万个企业,发展很不平衡,有大量落后于现代水准的产业,大部分企业还比较落后,手工劳动占有相当的比重,我国能独立开发现代机械自动化技术的企业可以说没有;我国机械制造业企业中自动化装备少、水准低,不仅在数量上同世界先进国家有较大差距,而且在品种上、质量上、使用上,同世界先进水准也存在阶段性差距。实现我国机械自动化技术是一个长期的过程,不可能一蹴而就。需要循序渐进,不断努力,创造条件,向自动化的高级理想阶段迈进。当前,我国还处在社会主义初级阶段,经济、财力、生产力水准、国民素质等,与世界主要国家的差距是很大的;我国有丰富的劳动力资源,每年城镇新增就业人口达
一、标准模架的选用(经验法——适用于大型模具) (1)模架与镶块尺寸的确定:模具的大小主要取决于 塑件的大小和结构,对于模具而言,在保证足够强度的前提 下,结构越紧凑越好。如图4-146 所示。根据产品的外形尺 寸(平面投影面积与高度),以及产品本身结构(侧向分型 滑块等结构)可以确定镶件的外形尺 寸,确定好镶件的大小后,可大致确定模架的大小了。普通塑件 模具模架与镶件大小的选择,可参考下面的数据: 图4-146 模架尺寸的确定 “A”—表示镶件侧边到模板侧边的距离; “B”—表示定模镶件底部到定模板底面的距离; “C”—表示动模镶件底部到动模板底面的距离; “D”—表示产品到镶件侧边的距离; “E”—表示产品最高点到镶件底部的距离; “H”—表示动模支承板的厚度(当模架为A 型时) “X”—表示产品高度。 产品投影面积S ㎜ A B C H D E
以上数据,仅作为一般性结构塑件摸架参考,对于特珠的塑件应注意以下几点: ①当产品高度过高时(产品高度X≥D),应适当加大“D”,加大值ΔD=(X-D)/2; ②有时为了冷却水道的需要对镶件的尺寸做以调整,以达到较好冷却效果; ③结构复杂需做特殊分型或顶出机构,或有侧向分型结构需做滑块时,应根据不同情况适当调整镶件和模架的大小以及各摸板厚度,以保证 模架的强度。 (2)垫块高度的确定: 垫块的高度应保证足够的顶出行程,然后留出一定的余量(5-10mm),以保证完全顶出时,推杆固定板不至于撞到动模板或动模支承板。 (3)模架整体结构的确定: 在基本选定模架之后,应对模架整体结构进行校核,看所确定的模架是否合适所选定或客户给定的注塑机,包括模架外形的大小、厚度、最大开模行程、顶出方式和顶出行程等。 5.标准模架选用举例现有一塑件型腔平面尺寸为200mm×300mm ,高为30mm ,决定采用点浇口,塑件用推杆推出,试选择标准模加。解:从表4-9 可查得:该产品投影面积为S=200×300=60000mm。选择C 型结构,可查得:A=75mm,D=40mm 则模具宽:N=(75+40)×2+200=430mm 模具长:L=(75+40)×2+300=530mm 查P4 型模架选定为N×L=450×560 型标准化模架(点浇口带推件板) 注:模具宽度本为B,但为了与定模厚度B 区别,在此宽度B 改为N 较好。
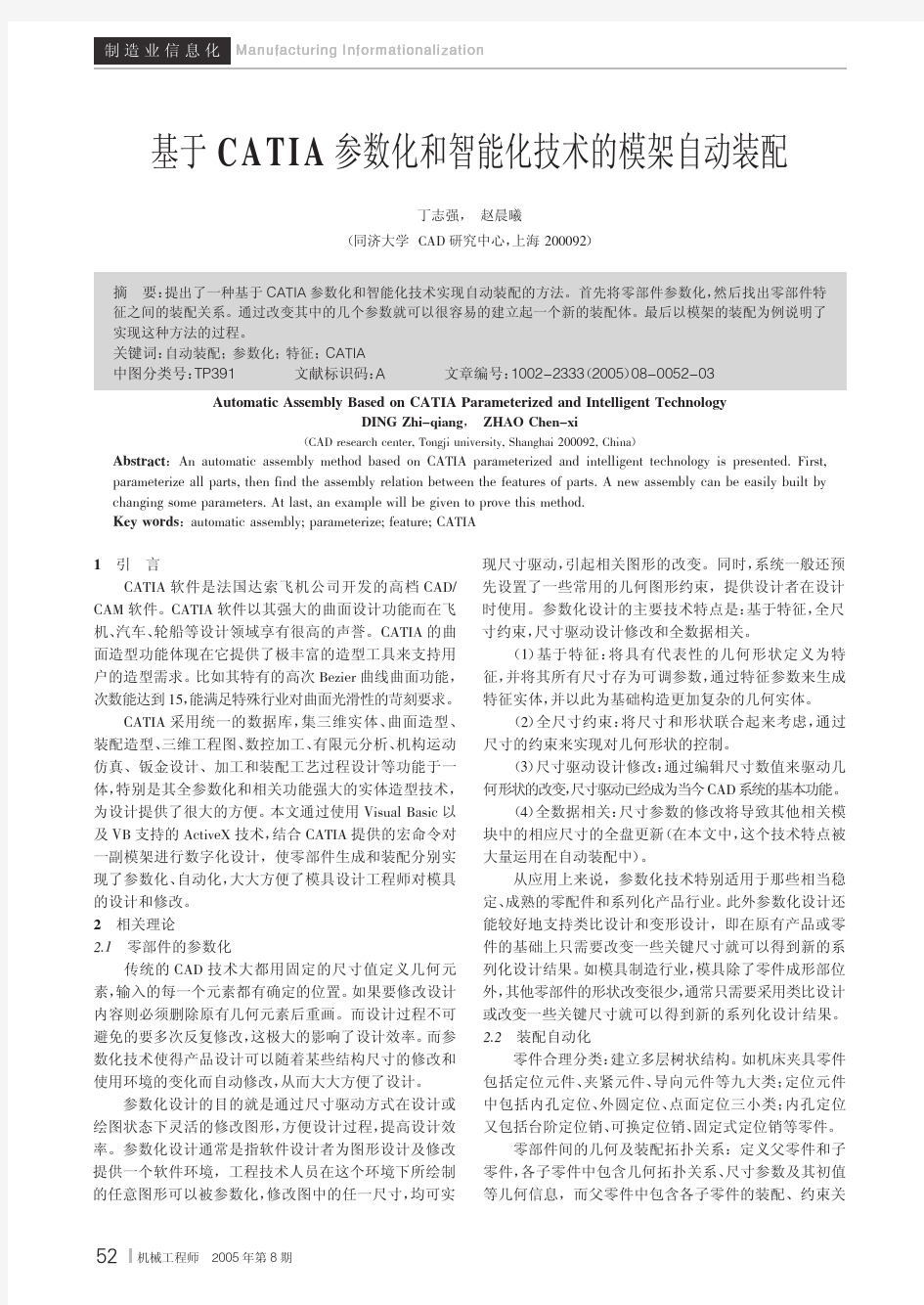
地址:陕西省西安市未央区大学园区陕西科技大学 田普建 Shaanxi University of Science and Technology Pro/ENGINEER Wildfire 5.0培训内部资料 EMX6.0操作流程
地址:陕西省西安市未央区大学园区陕西科技大学 田普建 Shaanxi University of Science and Technology Pro/ENGINEER Wildfire 5.0培训内部资料 1. 设置工作目录, 单击菜单栏中的“EMX 6.0”→“项目”→“新建”命令,弹出“项目”对话框。在“数据”选项组的“项目名称”文本框中输入“EMX_sample1”。在“选项”选项组中点选“毫米”单选钮,;点选“组件”单选钮,如下图所示。单击对话框中的(确定)按钮,完成EMX 组件的创建。
地址:陕西省西安市未央区大学园区陕西科技大学 田普建 Shaanxi University of Science and Technology Pro/ENGINEER Wildfire 5.0 培训内部资料 2. 单击菜单栏中的“EMX 6.0”→“模架”→“组件定义”命令,弹出“模架定义”对话框。选择模架供应商为“futaba_s ”,系统弹出更新元件提示,选择“”,将尺寸选择为“270×300” 系统弹出更新元 件提示,选择“ ”。
地址:陕西省西安市未央区大学园区陕西科技大学 田普建 Shaanxi University of Science and Technology Pro/ENGINEER Wildfire 5.0培训内部资料 3. 单击(从文件载入组件定义)按钮,系统弹出“载入EMX 组件”对话框,如图所示。单击“载入EMX 组件”对话框中的(从文件载入组件定义)按钮,所选的模架加载到“模架定义”对话框的视图中。单击(确定)按钮,模板加载到图形区中。
古代人类在长期生产和生活中﹐为了减轻自己的劳动﹐逐渐产生利用自然界动力代替人力畜力﹐以及用自动装置代替人的部分繁难的脑力活动的愿望﹐经过漫长岁月的探索﹐他们互不相关地造出一些原始的自动装置。 1. 我国古代自动装置 指南车是我国古代伟大的发明之一,也是世界上最早的控制论机械之一。用英国著名科学史专家李约瑟的话说,中国古代的指南车“可以说是人类历史上迈向控制论机器的第一步”,是人类“第一架体内稳定机”。 相传在四千多年以前,我国南方有个九黎部族。有一年,他们的首领蚩尤,与炎帝族发生了冲突。于是,炎帝族和黄帝族联合起来,在涿鹿同九黎族进行了一次激烈的战斗。蚩尤使用魔法,造出漫天的大雾,把黄帝和他的军队团团围在里面。正当黄帝愁眉不展、万分焦急的时候,一个叫风后的臣子做了一辆指南车。有了指南车的引导,黄帝统帅的军队冲破重重迷雾,终于战胜了蚩尤。 指南车,又称司南车,是中国古代用来指示方向的一种机械装置。指南车与指南针相比在指南针利用电磁效应的原理截然不同,是根据差速齿轮原理设计的,它是利用齿轮传动系统,根据车轮的转动,由车上木人指示方向。不论车子转向何方,木人的手始终指向南方,“车虽回运而手常指南”。 漏壶是我国古代计时器的一种,我国现存最完整的成组型滴漏是元代仁宗延祐三年(公元1316年)铸造,全组由4个安放在阶梯上的漏壶组成,最上层称日壶,第二层称月壶,第三层称星壶,最底下一层称受水壶。各壶都有铜盖,受水壶铜盖中央插一把铜尺,尺上刻有12时辰的刻度,自下而上为子、丑、寅、卯、辰、巳、午、未、申、酉、戌、亥。铜尺前插一木制浮剑,木剑下端是一块木板,叫浮舟。水由日壶按次沿龙头滴下,受水壶中的水随时间的推移而逐渐增加,浮剑逐渐上升,从而读出时间。 记里鼓车这是一种会自动记载行程的车辆,1800年前的汉代,大科学家张衡发明了记里鼓车。记里鼓车的基本原理和指南车相同,也是利用齿轮机构的差动关系。据记载,记里鼓车分上下两层,上层设一钟,下层设一鼓。记里鼓车上有小木人,头戴峨冠,身穿锦袍高坐车上。车走十里,木人击鼓1次,当击鼓十次,就击钟一次。 漏水转浑天仪简称浑天仪。为东汉科学家张衡创制的一件天文仪器。是一种水运浑象。用一个直径四尺多的铜球,球上刻有二十八宿、中外星官以及黄赤道、南北极、二十四节气、恒显圈、恒隐圈等,成一浑象,再用一套转动机械,把浑象和漏壶结合起来。以漏壶流水控制浑象,使它与天球同步转动,以显示星空的周日视运动,如恒星的出没和中天等。 候风地动仪是世界上第一架测验地震的仪器。中国东汉时期天文学家张衡于汉顺帝阳嘉元年(132)制成,候风地动仪用精铜制成,直径2.7米,其外形像一个大型酒樽。地动仪里面有精巧的结构,主要为中间的都柱(相当于一种倒立型的震摆)和它周围的八道(装置在摆的周围的8组机械装置)。在樽的外面相应地设置8条口含小铜珠的龙,每个龙头下面都有一只蟾蜍张口向上。如果发生较强的地震,都柱因受到震动而失去平衡,这样就会触动八道中的一道,使相应的龙口张开,小铜珠即落入蟾蜍口中,由此便可知道地震发生的时间和方向。 水运仪象台是中国古代一种大型的天文仪器,由宋朝天文学家苏颂等人创建。它是集观测天象的浑仪、演示天象的浑象、计量时间的漏刻和报告时刻的机械装置于一体的综合性观测仪器,实际上是一座小型的天文台。这台仪器的制造水平堪称一绝,充分体现了我国古代人民的聪明才智和富于创造的精神。 2. 自动装置的出现和应用(18世纪以前) 公元 1世纪古埃及和希腊的发明家也创造了一些机器人或机器动物来适应当时宗教活
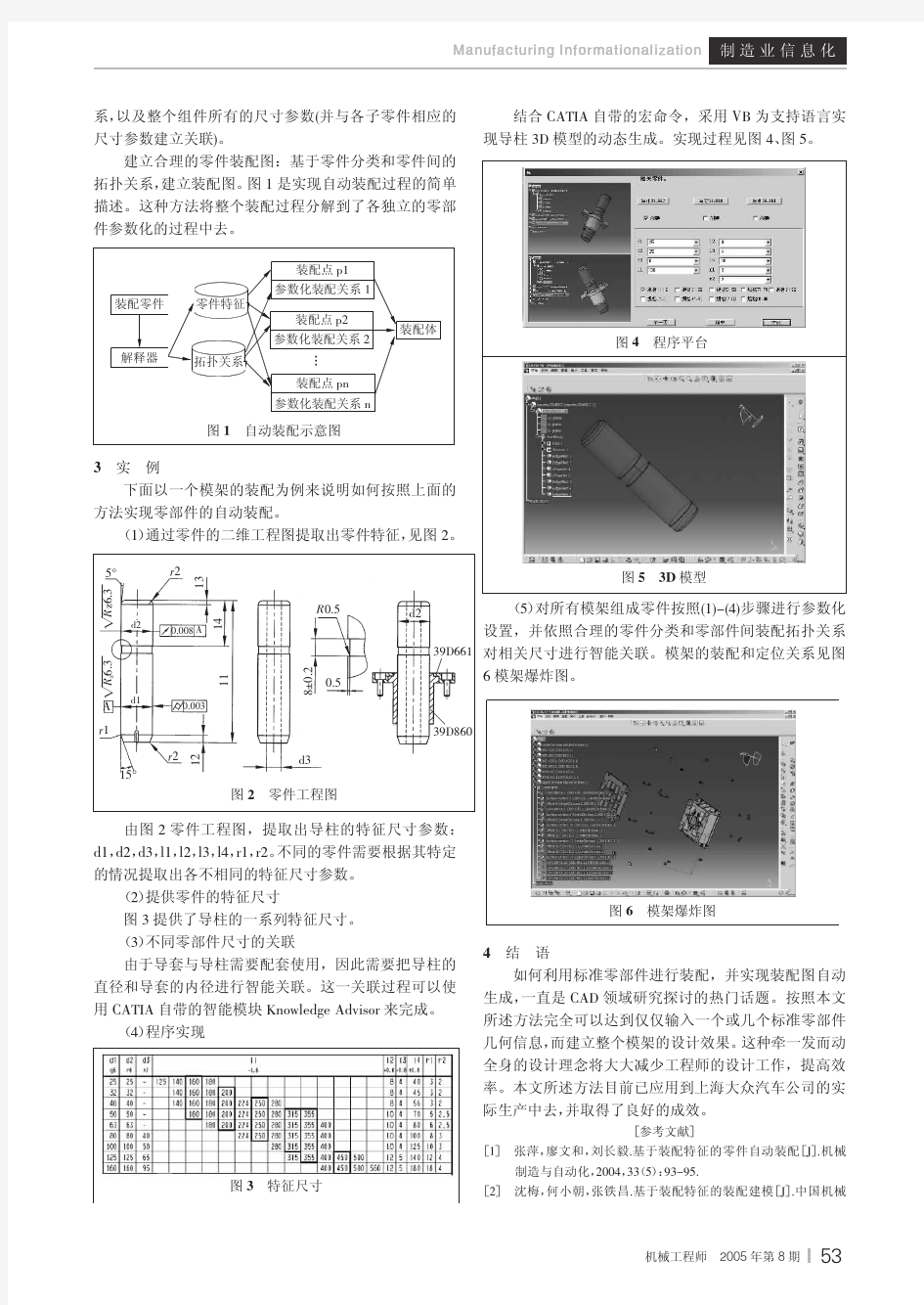
模架调用的一般用法 下面是龙记标准模架的最常用的细水口系统的调用界面: 一、模架型式 1. 细水口系统又成为小水口系统,它的水口(即浇口)是针点式的,一般都采用三板模型式,如子类型的DA,DB,DC,DD。但在特殊需要时也提供两板型式,如EA,EB,EC,ED,它们是在DA,DB,DC,DD的基础上去掉了各自的脱料板(即R板)。 2. 一般模架都分为I型和H型,以配合不同的锁模方式的需要。上图中的DAI型即为I 型,也称为工字模,DAH型即为H型,也称为直身模。 二、模架尺寸列表框 这个比较简单,选择所需要的尺寸即可 三、数据库相关 模架尺寸列表框右侧的图标是用来修改模架的注册文件和数据库文件以及模架调入的相关信息。一般不需要改动它。只是在需要将模架的XY方向旋转的时候,才需要点击旋转模架图标来将模架旋转至合适的角度。 四、模架参数列表框 具体的模架参数解释请参看模架的参数和表达式的解释,这里针对龙记的模架参数重 点解释一下: mold_w=300 ;模架的宽度为300 mold_l=350 ;模架的长度为350 move_open=0 移动侧(B板以下部分)的打开距离为0 fix_open=0 ;固定侧(A板以上部分)的打开距离为0 EJB_open=0 ;顶针板和顶针底板(E,F)离开下固定板的距离为0 EG_Guide=1:ON ;追加顶出导向系统 0:OFF ;不追加顶出导向系统 aP_h=;从列表中选择A板(型腔板)的高度 BP_h=从列表中选择B板(型芯板)的高度 Es_n=;从列表中选择顶出板的螺钉数量(单边) SPN_TYPE=0:OUT ;拉杆位置在导柱的外侧 1: IN ;拉杆位置在导柱的内侧 Mold_type=I ;模架类型为工字模(I 型) H ;模架类型为直身模(H型) GTYPE=1:On A ;导柱位置在A板
自动化技术发展综述 学院: 班级: 姓名 学号:
自动化的伊始 ——蒸汽机的发明与发展 世界上第一台蒸汽机是由古希腊数学家亚历山大港的希罗(Hero of Alexandria)于1世纪发明的汽转球(Aeolipile),是蒸汽机的雏形。 约1679年法国物理学家丹尼斯·巴本在观察蒸汽逃离他的高压锅后制造了 第一台蒸汽机的工作模型。约与此同时萨缪尔·莫兰也提出了蒸汽机的主意。 1698年托马斯·塞维利、1712年托马斯·纽科门和1769年詹姆斯·瓦特制造了早期的工业蒸汽机,他们对蒸汽机的发展都做出了自己的贡献。1807年罗伯特·富尔顿第一个成功地用蒸汽机来驱动轮船。瓦特并不是蒸汽机的发明者,在他之前,早就出现了蒸汽机,即纽科门蒸汽机,但它的耗煤量大、效率低。瓦特运用科学理论,逐渐发现了这种蒸汽机的毛病所在。从1765年到1790年,他进行了一系列发明,比如分离式冷凝器、汽缸外设置绝热层、用油润滑活塞、行星式齿轮、平行运动连杆机构、离心式调速器、节气阀、压力计等等,使蒸汽机的效率提高到原来纽科门机的3倍多,最终发明出了现代意义上的蒸汽机。 1800年,英国的特里维西克设计了可安装在较大车体上的高压蒸汽机。1803年,他把它用来推动在一条环形轨道上开动的机车,找来喜欢新奇玩意儿的人乘坐,向他们收费,这就是机车的雏型。英国的史蒂芬孙将机车不断改进,于1829年创造了“火箭”号蒸汽机车,该机车拖带一节载有30位乘客的车厢,时速达46公里/时,引起了各国的重视,开创了铁路时代。 19世纪末,随着电力应用的兴起,蒸汽机曾一度作为电站中的主要动力机械。1900年,美国纽约曾有单机功率达五兆瓦的蒸汽机电站。 蒸汽机的发展在20世纪初达到了顶峰。它具有恒扭矩、可变速、可逆转、 运行可靠、制造和维修方便等优点,因此曾被广泛用于电站、工厂、机车和船舶 等各个领域中,特别在军舰上成了当时唯一的原动机。 蒸汽机的发明与发展具有划时代的意义。蒸汽机的出现和改进促进了社会经济的发展,但同时经济的发展反过来又向蒸汽机提出了更高的要求,如要求蒸汽机功率大、效率高、重量轻、尺寸小等。尽管人们对蒸汽机作过许多改进,不断扩大它的使用范围和改善它的性能,但是随着汽轮机和内燃机的发展,蒸汽机因存在不可克服的弱点而逐渐衰落。 自动化从实践上升到理论的高度 ——《控制论》的发表 1947年10月,维纳写出划时代的著作《控制论》,1948年出版后,立即风行世界。维纳的深刻思想引起了人们的极大重视。它揭示了机器中的通信和控制机能与人的神经、感觉机能的共同规律;为现代科学技术研究提供了崭新的科
一、注射模标准模架 目前,国内外有许多标准注射模架产品在市场出售,我国注射模标准模架共有两个国家标准,一是适用于模板尺寸BL≤560mm900mm的中小型模架;二是适用于模板尺寸BL为630mm630mm~1250mm2000mm的大型模架。 美国DME公司的标准模架共有七种系列,它们是A、AR、B、X5、X6、AX、T系列。在这七种系列中,A、AR、B系列属于两板结构(单分型面),X5、X6、AX属于三板结构(双分型面),T系列属于四板结构(三分型面)。 在两板结构中,A系列和B系列结构相同,只是A系列设置了上、下垫板,AR系列与A系列相似,只是导柱与导套倒装。 在三板结构中,X5、X6系列在A系列上增加了推件板,X6与X5系列的区别在于X6系列设置有动模板。AX系列与A系列的不同点在于AX系列具有一块中间活动板,可以形成两个分型面,分别脱出流道凝料和塑件制品。 在T系列中有两块活动板,可以形成三个分型面,用于一些特殊场合。 标准模架的选择是注射模CAD系统的一个重要步骤。标准模架系列应在设计工作开始之前,就已标准模架的选择 在SolidWorks中可以使用MoldBase选择标准模架,在模架数据库中存储了DME,PCS,Progressive,Superior和HASCO等国际一流的模架供应商提供的标准模架和模具零部件,操作者不仅可以通过它选取零部件,更重要的是它包含模具零部件的装配关系,在使用中当一个零部件被修改时,其他相关零件将会被自动修改更新。例如,在模架中增加一个顶杆,它所经过的所有模板都将自动增加必要的通孔并具有所需要的间隙。 经存放在数据库中。 二、标准模架CAD 标准模架CAD设计过程描述如下:系统根据选择模板决策进行推理(顶出板宽度大于型腔总宽度、导柱中心距大于型腔总长度),一旦顶出板宽度确定,模板宽度随之确定。当模板长度和宽度确定后,系统可搜索到所有与模板尺寸对应的模具零件信息。用户的交互式选择结束后,模架零件被自动计算和建立,并以各自的位置和姿态组装。在模架选定,型腔周边尺寸确定后,可以利用模具CAD系统选用合适的模具标准件的尺寸。注射模标准件包括:导柱导套、浇口套、顶杆、回程杆、水嘴等。最后利用CAD系统的集合能力,将型腔、型芯、浇注系统、顶出杆、冷却水孔等与模架组合起来生成模具图。 (1)标准模架系列选择流程图 使用下列流程图,用戶可以方便地选择所需要的标准模架系列。
自动化技术发展综述 学院: 班级: 姓名学号: 自动化的伊始 --- 蒸汽机的发明与发展 世界上第一台蒸汽机是由古希腊数学家亚历山大港的希罗(Hero of
Alexandria )于1世纪发明的汽转球(Aeolipile ),是蒸汽机的雏形。 约1679年法国物理学家丹尼斯巴本在观察蒸汽逃离他的高压锅后制造了第一台蒸汽机的工作模型。约与此同时萨缪尔莫兰也提出了蒸汽机的主意。 1698年托马斯塞维利、1712年托马斯纽科门和1769年詹姆斯瓦特制造了早期的工业蒸汽机,他们对蒸汽机的发展都做出了自己的贡献。1807年罗伯特富尔顿第一个成功地用蒸汽机来驱动轮船。瓦特并不是蒸汽机的发明者,在他之前,早就出现了蒸汽机,即纽科门蒸汽机,但它的耗煤量大、效率低。瓦特运用科学理论,逐渐发现了这种蒸汽机的毛病所在。从1765年到1790年,他 进行了一系列发明,比如分离式冷凝器、汽缸外设置绝热层、用油润滑活塞、行星式齿轮、平行运动连杆机构、离心式调速器、节气阀、压力计等等,使蒸汽机的效率提高到原来纽科门机的3倍多,最终发明出了现代意义上的蒸汽机。 1800年,英国的特里维西克设计了可安装在较大车体上的高压蒸汽机。1803 年,他把它用来推动在一条环形轨道上开动的机车,找来喜欢新奇玩意儿的人乘坐,向他们收费,这就是机车的雏型。英国的史蒂芬孙将机车不断改进,于1829 年创造了火箭”号蒸汽机车,该机车拖带一节载有30位乘客的车厢,时速达46 公里/时,弓I起了各国的重视,开创了铁路时代。 19世纪末,随着电力应用的兴起,蒸汽机曾一度作为电站中的主要动力机械。1900年,美国纽约曾有单机功率达五兆瓦的蒸汽机电站。 蒸汽机的发展在20世纪初达到了顶峰。它具有恒扭矩、可变速、可逆转、运行可靠、制造和维修方便等优点,因此曾被广泛用于电站、工厂、机车和船舶等各个领域中,特别在军舰上成了当时唯一的原动机。 蒸汽机的发明与发展具有划时代的意义。蒸汽机的出现和改进促进了社会经济的发展,但同时经济的发展反过来又向蒸汽机提出了更高的要求,如要求蒸汽机功率大、效率高、重量轻、尺寸小等。尽管人们对蒸汽机作过许多改进,不断扩大它的使用范围和改善它的性能,但是随着汽轮机和内燃机的发展,蒸汽 机因存在不可克服的弱点而逐渐衰落。 自动化从实践上升到理论的高度 《控制论》的发表 1947年10月,维纳写出划时代的著作《控制论》,1948年出版后,立即风行世界。维纳的深刻思想引起了人们的极大重视。它揭示了机器中的通信和控制机能与人的神经、感觉机能的共同规律;为现代科学技术研究提供了崭新的科学方法;它从多方面突破了传统思想的束缚,有力地促进了现代科学思维方式和当代哲学观念的一系列变革。 在控制论中,控制”勺定义是:为了改善”某个或某些受控对象的功能或发
4.标准模架的选用(经验法——适用于大型模具) (1)模架与镶块尺寸的确定: 模具的大小主要取决于塑件的大小和结构,对于模具而言,在保证足够强度的前提下,结构越紧凑越好。如图4-146所示。 根据产品的外形尺寸(平面投影面积与高度),以及产品本身结构(侧向分型滑块等结构)可以确定镶件的外形尺寸,确定好镶件的大小后,可大致确定模架的大小了。 普通塑件模具模架与镶件大小的选择,可参考下面的数据: 图4-146 模架尺寸的确定 “A”—表示镶件侧边到模板侧边的距离; “B”—表示定模镶件底部到定模板底面的距离; “C”—表示动模镶件底部到动模板底面的距离; “D”—表示产品到镶件侧边的距离; “E”—表示产品最高点到镶件底部的距离; “H”—表示动模支承板的厚度(当模架为A型时) “X”—表示产品高度。 产品投影面积S A B C H D E ㎜2 100-900402030302020
以上数据,仅作为一般性结构塑件摸架参考,对于特珠的塑件应注意以下几点: ①当产品高度过高时(产品高度X≥D),应适当加大“D”,加大值ΔD=(X-D)/2; ②有时为了冷却水道的需要对镶件的尺寸做以调整,以达到较好冷却效果; ③结构复杂需做特殊分型或顶出机构,或有侧向分型结构需做滑块时,应根据不同情况适当调整镶件和模架的大小以及各摸板厚度,以保证模架的强度。 (2)垫块高度的确定: 垫块的高度应保证足够的顶出行程,然后留出一定的余量(5-10mm),以保证完全顶出时,推杆固定板不至于撞到动模板或动模支承板。 (3)模架整体结构的确定: 在基本选定模架之后,应对模架整体结构进行校核,看所确定的模架是否合适所选定或客户给定的注塑机,包括模架外形的大小、厚度、最大开模行程、顶出方式和顶出行程等。 5.标准模架选用举例 现有一塑件型腔平面尺寸为200mm×300mm,高为30mm,决定采用点浇口,塑件用推杆推出,试选择标准模加。 解:从表4-9可查得:该产品投影面积为S=200×300=60000mm2。
模架之标准模架 模具是制造模型的工具,按特定形状去成型具有一定形状和尺寸的制品的工具。模具技 术在制造业中占用很高的地位。对于我们产品设计人员来说,模具在工作中频繁出现,与我们的工作内容关系紧密,因为我们设计出来的产品零件很多需要通过模具来实现,对于模具 知识的掌握是必不可少的。 模具(注射模)组成:成型部分、浇注系统、导向机构、脱模装置、侧向分型抽芯机构、温度调节和排气系统和标准模架。 一,标准模架结构简述 不同产品零件所需要的模具不一样,而模具结构又有很多相同的结构,所以为了更加效 率地做出模具,人们开始使用一些标准模架,标准模架构成了模具的骨架,只要换成不同的 匹配模仁,就能成型不同的零件,对于整个模具来说,就有三个部分组成:前模板、后模板和模仁,当然,一套模具是相当复杂的,这里只是介绍模具的骨架--标准模架。 1标准模架的分类 对于塑胶模具,按照基本结构分类,一般分为二板模式模具(大水口)和三板式模具(细水口),其中三板式模具又可以细分为细水口模具和简化型细水口模具,对应的就有大水口模架、细水口模架和简化型细水口模架。 2,模架的基本结构(以二板模CI型为例)
由上图可以看出标准模架的组成 (1),板子部分:前模底板、后模底板、前模板、后模板、上顶出板、下顶出板、两个模脚。 前后模底板:分别要和注塑机上面的定模扳和动模板固定在一起。 前后模板:两个模仁就是要镶嵌在两个模板里面。 上下顶出板:注塑机上面的合模系统中的顶出机构会顶住这两块板,进而将塑件顶出。模脚:为零件的顶出支撑出一定的空间。 (2),固定螺钉部分:前模固定螺钉,、后模板固定螺钉、顶出板锁紧螺钉、模脚固定螺钉。 (3),辅助零部件:导柱与导套、回针。 导柱与导套:导柱在后模板,导套在前模板,当前后模合并时起导向作用。 回针:也较复位杆,上面套有弹簧,当注塑机上面的顶出杆顶出顶出板并将塑件顶出,此时回针上面的弹簧使顶出板复位。 (4),辅助零件部分:吊环孔,为了在模具加工时方便搬运而设计的。 二,模具结构3D图解
( 安全管理 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 关于机械自动化技术发展的几 点探索(新版) Safety management is an important part of production management. Safety and production are in the implementation process
关于机械自动化技术发展的几点探索(新 版) 先进工业科学技术的发展推动了我国工业机械自动化的发展进程,机械自动化技术的科研成果使我国工业发展走向和市场经济紧密相连,市场经济发展的方向,对我国机械自动化技术的发展至关重要,本文对有关机械自动化技术发展的理论知识、实践课题等进行深入研究。 我国工业机械工程建设发展历史悠久,自改革开放以来,党中央多次指出要将工业自动化发展作为重要工业技术发展目标。机械自动化技术是传统工业机械设备与先进计算机网络工程技术相融合的产物,这种自动化生产系统可以有效推动工业机械生产的效率、生产总值,并且还在保证较高生产转换率的同时,节约了人力资源。机械自动化技术的发展和应用,对我国现代工业机械设备的改造和
生产具有重要意义。 实用型现代机械自动化技术 新中国成立以来,我国各工业项目建设逐渐展开,但是由于社会生产体制的约束,建国初期的工业生产技术发展速度十分缓慢。改革开放之后,我国工业技术才进入到快速发展阶段,由此开始慢慢引进国外先进机械自动化技术和自主研发机械自动化技术。机械自动化技术应用在现代工业产业中,可以使机械设备在具有超强的生产操作功能的同时,实现智能化控制。传统的生产设备只是单一的通过人工操作进行生产,而自动化机械设备则不然,具有很高的集成化和自动化,工作人员只需要通过计算机程序控制就能实现并完成机械设备生产、工作、维修、监测的全部过程。 目前,我国机械制造行业的自动化技术应用存在很多问题,首先是工业机械设备的生产规模,由于自动化技术设备要求的集成程度很高,所以其设备的控制系统非常复杂,一旦系统出现问题,就会影响整个机械自动化生产线。所以为了扩大机械自动化技术的生产模式,实现大规模生产和运行,就必须发展实用型现代机械自动