
汽车网络与总线标准
汽车作为一种交通工具,目前承担起了越来越多的功能。现代科技已经将网际网络、无线连接、个人通讯电子装置、娱乐设备等整合到汽车内部,与动力系统相结合,为乘客提供了前所未有的便利。而这一切都有赖于汽车网络技术,它是汽车电子发展的重要方向之一。
过去,汽车通常采用点对点的通信方式,将电子控制单元及负载设备连接起来。随着电子设备的不断增加,势必造成导线数量的不断增多,从而使得在有限的汽车空间内布线越来越困难,限制了功能的扩展。同时导线质量每增加50 kg,油耗会增加0.2 L/100 km。此外,电控单元并不是仅仅与负载设备简单地连接,更多的是与外围设备及其他电控单元进行信息交流,并经过复杂的控制运算,发出控制指令,这些是不能通过简单地连接所能完成的。而单从线束本身来说,它也是汽车电子系统中成本较高,连接复杂的部件。
随着汽车电子控制单元以及汽车电子装置的不断增多,采用串行总线实现多路传输,组成汽车电子网络,是一种既可靠又经济的做法。同时现代汽车基于安全性和可靠性的要求,正越来越多地考虑使用电控系统代替原有的机械和液压系统。
1.汽车电子网络结构
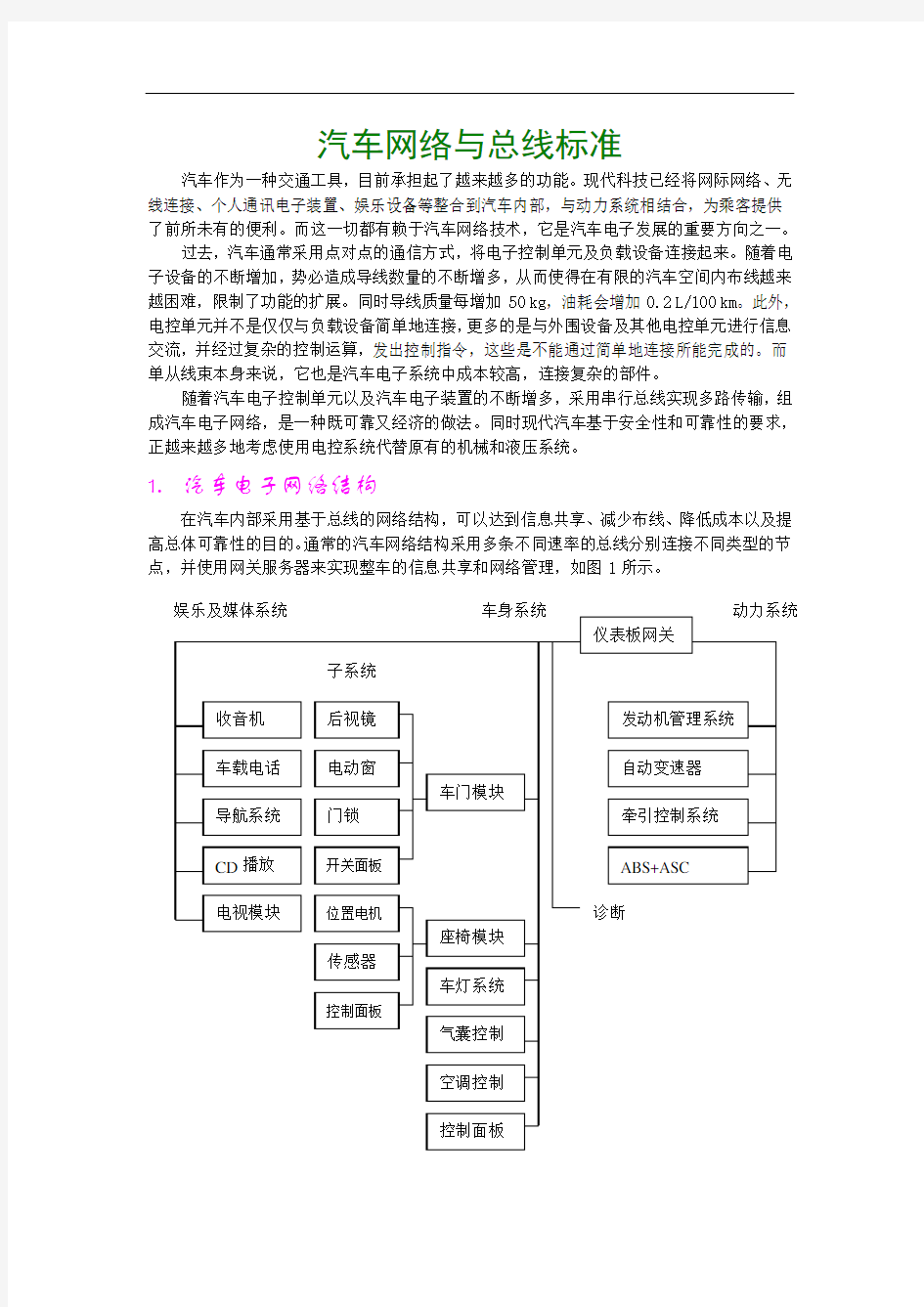
在汽车内部采用基于总线的网络结构,可以达到信息共享、减少布线、降低成本以及提高总体可靠性的目的。通常的汽车网络结构采用多条不同速率的总线分别连接不同类型的节点,并使用网关服务器来实现整车的信息共享和网络管理,如图1所示。
车身系统的控制单元多为低速马达和开关量器件,对实时性要求低而数量众多。使用低速的总线连接这些电控单元。将这部分电控单元与汽车的驱动系统分开,有利于保证驱动系统通信的实时性。此外,采用低速总线还可增加传输距离、提高抗干扰能力以及降低硬件成本。
动力与传动系统的受控对象直接关系汽车的行驶状态,对通讯实时性有较高的要求。因此使用高速的总线连接动力与传动系统。传感器组的各种状态信息可以广播的形式在高速总线上发布,各节点可以在同一时刻根据自己的需要获取信息。这种方式最大限度地提高了通信的实时性。
故障诊断系统是将车用诊断系统在通信网络上加以实现。
信息与车载媒体系统对于通讯速率的要求更高,一般在2 Mb/s以上。采用新型的多媒体总线连接车载媒体。这些新型的多媒体总线往往是基于光纤通信的,从而可以充足保证带宽。
网关是电动汽车内部通信的核心,通过它可以实现各条总线上信息的共享以及实现汽车内部的网络管理和故障诊断功能。
随着新技术的不断发展,在未来的汽车网络中,还将会有专门用于气囊的安全总线系统,以及X-by-Wire系统。
2.汽车总线标准、协议
国际上众多知名汽车公司早在20世纪80年代就积极致力于汽车网络技术的研究及应用,迄今为止,已有多种网络标准。目前存在的多种汽车网络标准,其侧重的功能有所不同。为方便研究和设计应用,SAE车辆网络委员会将汽车数据传输网划分为A、B、C三类。
A类是面向传感器/执行器控制的低速网络,数据传输位速率通常小于1O kb/s,主要用于后视镜调整,电动窗、灯光照明等控制;B类是面向独立模块间数据共享的中速网络,位速率在10-125 kb/s,主要应用于车身电子舒适性模块、仪表显示等系统;C类是面向高速、实时闭环控制的多路传输网,位速率在125 kb/s-1 Mb/s之间,主要用于牵引控制、先进发动机控制、ABS等系统。
在今天的汽车中,作为一种典型应用,车体和舒适性控制模块都连接到CAN总线上,并借助于LIN总线进行外围设备控制。而汽车高速控制系统,通常会使用高速CAN总线连接在一起。远程信息处理和多媒体连接需要高速互连,视频传输又需要同步数据流格式,这些都可由D2B(Domestic Digital Bus)或MOST(Media Oriented Systems Transport) 协议来实现。无线通信则通过Blue tooth技术加以实现。而在未来的5-10年里,TTP(Time Trigger Protocol)和Flex Ray将使汽车发展成百分之百的电控系统,完全不需要后备机械系统的支持。
但是,至今仍没有一个通信网络可以完全满足未来汽车的所有成本和性能要求。因此,汽车制造商和OEM(Original Equipment Manufacture)商仍将继续采用多种协议(包括LIN、CAN和MOST等),以实现未来汽车上的联网。
(1)A类总线标准、协议
A类的网络通信大部分采用UART(Universal Asynchronous Reveiver/Transmitter)标准。UART使用起来既简单又经济,但随着技术的发展,预计在今后几年中将会逐步在汽车通信系统中被停止使用。而GM公司所使用的E&C(Entertainment and Comfor)、Chrysler 公司所使用CCD(Chrysler Collision Detection)和Ford公司使用的ACP(Audio Control Protocol),现在已逐步停止使用。Toyota公司制定的一种通信协议BEAN(Body Electronics Area Network)目前仍在其多种车型(Clesior、Aristo、Prius和Celica)中加以应用。
A类目前首选的标准是LIN。LIN是用于汽车分布式电控系统的一种新型低成本串行通信系统,它是一种基于UART的数据格式、主从结构的单线12V的总线通信系统,主要用于
智能传感器和执行器的串行通信,而这正是CAN总线的带宽和功能所不要求的部分。由于目前尚未建立低端多路通信的汽车标准,因此LIN正试图发展成为低成本的串行通信的行业标准。
LIN的标准简化了现有的基于多路解决方案的低端SCI,同时将降低汽车电子装置的开发、生产和服务费用。LIN采用低成本的单线连接,传输速度最高可达20kb/s,对于低端的大多数应用对象来说,这个速度是可以接受的。它的媒体访问采用单主/多从的机制,不需要进行仲裁,在从节点中不需要晶体振荡器而能进行自同步,这极大地减少了硬件平台的成本。
在表1中,给出了LIN总线以及下列其他各类典型汽车总线标准、协议特性和参数。
(2) B类总线标准、协议
B类中的国际标准是CAN总线。CAN总线是德国BOSCH公司从20世纪80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。通信速率可达1Mb/s。CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码,最多可标识2048(2.OA)个或5亿(2.OB)多个数据块。采用这种方法的优点可使网络内的节点个数在理论上受限制。数据段长度最多为8个字节,不会占用总线时间过长,从而保证了通信的实时性。CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
B类标准采用的是ISO11898,传输速率在lOOkb/s左右。对于欧洲的各大汽车公司从1992年起,一直采用ISO11898,所使用的传输速率范围从47.6-500kb/s不等。近年来,基于ISO11519的容错CAN总线标准在欧洲的各种车型中也开始得到广泛的使用,ISO11519-2的容错低速2线CAN总线接口标准在轿车中正在得到普遍的应用,它的物理层比ISO11898要慢一些,同时成本也高一些,但是它的故障检测能力却非常突出。与此同时,以往广泛适
用于美国车型的J1850正逐步被基于CAN总线的标准和协议所取代。
(3)高速总线系统标准、协议
由于高速总线系统主要用于与汽车安全相关,以及实时性要求比较高的地方,如动力系统等,所以其传输速率比较高。根据传统的SAE的分类,该部分属于C类总线标准,通常在125kb/s-1Mb/s之间,必须支持实时的周期性的参数传输。目前,随着汽车网络技术的发展,未来将会使用到具有高速实时传输特性的一些总线标准和协议,包括采用时间触发通讯的X by Wire系统总线标准和用于安全气囊控制和通讯的总线标准、协议。
①C类总线标准、协议。在C类标准中,欧洲的汽车制造商基本上采用的都是高速通信的CAN总线标准IS011898。而J1939供货车及其拖车、大客车、建筑设备似及农业设备使用,是用来支持分布在车辆各个不同位置的电控单元之间实现实时闭环控制功能的高速通信标准,其数据传输速率为250kb/s。在美国,GM公司已开始在所有的车型上使用其专属的所谓GMLAN总线标准,它是一种基于CAN的传输速率在500kb/s的通信标准。
ISO11898针对汽车(轿车)电子控制单元(ECU)之间,通信传输速率大于125kb/s,最高1Mb/s时,使用控制器局域网络构建数字信息交换的相关特性进行了详细的规定。
J1939使用了控制器局域网协议,任何ECU在总线空闲时都可以发送信息,它利用协议中定义的扩展帧29位标识符实现一个完整的网络定义。29位标识符中的前3位被用来在仲裁过程中决定消息的优先级。对每类消息而言,优先级是可编程的。这样原始设备制造商在需要时可以对网络进行调整。J1939通过将所有11位标识符消息定义为专用,允许使用11位标识符的CAN标准帧的设备在同一个网络中使用。这样,11位标识符的定义并不是直接属于J1939的一个组成部分,但是也被包含进来。这是为了保证其使用者可以在同一网络中并存而不出现冲突。
②安全总线和标准。安全总线主要是用于安全气囊系统,以连接加速度计、安全传感器等装置,为被动安全提供保障。目前已有一些公司研制出了相关的总线和协议,包括Delphi 公司的Safety Bus和BMW公司的Byteflight等。
Byteflight主要以BMW公司为中心制订。数据传输速率为10 Mb/s,光纤可长达43m。Byteflight不仅可以用于安全气囊系统的网络通信,还可用于X by Wire系统的通信和控制。BMW公司在2001年9月推出的新款BMW 7系列车型中,采用了一套名为ISIS(Intelligent Safety Integrated System)的安全气囊控制系统,它是由14个传感器构成的网络,利用Byteflight来连接和收集前座保护气囊、后座保护气囊以及膝部保护气囊等安全装置的信号。在紧急情况下。中央电脑能够更快更准确地决定不同位置的安全气囊的施放范围与时机,发挥最佳的保护效果。
③X by Wire总线标准、协议。X by Wire最初是用在飞机控制系统中,称为电传控制,现在已经在飞机控制中得到广泛应用。由于目前对汽车容错能力和通信系统的高可靠性的需求日益增长,X by Wire开始应用于汽车电子控制领域。在未来的5-10年里,X by Wire 技术将使传统的汽车机械系统(如刹车和驾驶系统)变成通过高速容错通信总线与高性能CPU相连的电气系统。在一辆装备了综合驾驶辅助系统的汽车上,诸如Steer by Wire、Brake by Wire和电子阀门控制等特性将为驾驶员带来全新驾驶体验。为了提供这些系统之间的安全通信,就需要一个高速、容错和时间触发的通信协议。目前,这一类总线标准主要有TTP、Byteflight和Flex Ray。
TTP(时间触发协议)是由维也纳理工大学的H.Kopetz教授开发的。时间触发系统和事件触发系统的工作原理大不相同。对时间触发系统来说,控制信号起源于时间进程;而在事件触发系统中,控制信号起源于事件的发生(如一次中断)。这项开发工作后来作为一个被欧洲委员会资助的项目,进一步发展成为一种汽车自动驾驶应用系统。TTP创立了大量汽车X by Wire控制系统,如驾驶控制和制动控制。TTP是一个应用于分布式实时控制系统的完整的通
信协议.它能够支持多种的容错策略,提供了容错的时间同步以及广泛的错误检测机制,同时还提供了节点的恢复和再整合功能。其采用光纤传输的工程化样品速度将达到25Mb/s。
如前所述BMW公司的By teflight可用于X by Wire系统的网络通信。Byteflight的特点是既能满足某些高优先级消息需要时间触发,以保证确定延迟的要求,叉能满足某些消息需要事件触发,需要中断处理的要求。但其它汽车制造商目前并无意使用Byteflight,而计划采用另一种规格——Flexray。这是一种新的特别适合下一代汽车应用的网络通信系统,它采用FTDM(Flexible Time Division Multiple Access)的确定性访问方式,具有容错功能和确定的消息传输时间,能够满足汽车控制系统的高速率通信要求。BMW、Daimler-Chrysler、Motorola和Philips联合开发和建立了这个FlexRay标准,GM公司也加入了FlexRay联盟,成为其核心成员,共同致力于开发汽车分布式控制系统中高速总线系统的标准。该标准不仅提高了一致性、可靠性、竞争力和效率,而且还简化了开发和使用,并降低了成本。
(4)诊断系统总线标准、协议
故障诊断是现代汽车必不可少的一项功能,使用排放诊断的目的主要是为了满足OBD-Ⅱ (ON Board Diagnose).OBD-Ⅲ或E-OBD(European-On Board Diagnose)标准。目前,许多汽车生产厂商都采用ISO14230(Keyword Protocol 2000)作为诊断系统的通信标准,它满足OBD-Ⅱ和OBD-Ⅲ的要求。在欧洲,以往诊断系统中使用的是ISO9141,它是一种基于UART 的诊断标准,满足OBD-Ⅱ的要求。美国的GM、Ford、DC公司广泛使用J1850(不含诊断协议)作为满足OBD-Ⅱ的诊断系统的通信标准。但随着CAN总线的广泛应用,预计到2004年,美国三大汽车公司将对乘用车采用于CAN的J2480诊断系统通信标准,它满足OBD-Ⅲ的通信要求。从2000年开始,欧洲汽车厂商已经开始使用一种基于CAN总线的诊断系统通信标准ISO315765,它满足E-OBD的系统要求。
目前,汽车的故障诊断主要是通过一种专用的诊断通信系统来形成一套较为独立的诊断网络,ISO9141和ISO14230就是这类技术上较为成熟的诊断标准。而ISO15765适用于将车用诊断系统在CAN总线上加以实现的场合,从而适应了现代汽车网络总线系统的发展趋势。ISO15765的网络服务符合基于CAN 的车用网络系统的要求,是遵照ISO14230-3及ISO15031-5中有关诊断服务的内容来制定的,因此,ISO15765对于ISO14230应用层的服务和参数完全兼容,但并不限于只用在这些国际标准所规定的场合,因而有广泛的应用前景。
(5)多媒体系统总线标准、协议
汽车多媒体网络和协议分为三种类型,分别是低速、高速和无线,对应SAE的分类相应为:IDB-C(Intelligent Data BUS-CAN)、IDB-M(Multimedia)和IDB-Wireless,其传输速率250kb/s-1OOMb/s。
低速用于远程通信、诊断及通用信息传送,IDE-C按CAN总线的格式以250kb/s的位速率进行消息传送。由于其低成本的特性,IDB-C有望成为汽车类产品的标准之一,并有可能于2004年前在OEM方式的车辆中推行。GM公司等美国汽车制造商计划使用POF(Plastic Optical Fiber)在车中安装以IEEE1394为基础的IDE-1394,预计Toyota等日本汽车制造商也将跟进采用POF。由于消费者手中已经有许多1394标准下的设备,并与IDE-1394相兼容,因此,IDE-1394将随着IDE产品进入车辆的同时而成为普遍的标准。
高速主要用于实时的音频和视频通信,如MP3、DVD和CD等的播放,所使用的传输介质是光纤,这一类里主要有D2B、MOST和IEEE1394。
D2B是用于汽车多媒体和通信的分布式网络,通常使用光纤作为传输介质,可连接CD 播放器、语音控制单元、电话和因特网。D2B技术已使用于Mercedes公司1999年款的S-Class 车型。
Damiler-Chrysler等公司计划与BWM公司一样使用MOST。MOST是车辆内LAN的接口规
格,用于连接车载导航器和无线设备等。数据传转速度为24Mbp/s。其规格主要由德国Oasis Silicon System公司制订。
在无线通信方面,采用Bluethootn规范,它主要是面向下一代汽车应用,如声音系统、信息通信等。目前已有一些公司研制出了基于Bluethooth技术的处理器,如美国德州仪器公司(TI)不久前宣布推出一款新型基于ROM的蓝牙基带处理器,可用于通讯及娱乐或PC外设等方面。
随着电子技术和大规模集成电路的迅速发展,网络技术在汽车上的广泛应用使汽车的动力性、操作稳定性、安全性等都上升到了新的高度,给汽车技术的发展注入了新的活力。
汽车车身电子网络控制系统 CAN(Controller Area Network)总线是一种有效支持分布式控制和实时控制的串行通讯网络。目前已经在国外汽车的电器网络中得到了广泛的应用。为了满足国产汽车车身控制总线的迫切需求,我们设计了一种基于CAN总线的整车管理系统的硬件方案。本方案重点对系统的总体结构、车身控制系统CAN总线的节点设置、节点及中央控制与CAN总线的接口电路进行了设计。 随着汽车电子技术的发展及汽车性能的不断提高,汽车上的电子装置越来越多。传统的电器系统大多采用点对点的单一通信方式,相互之间很少有联系,这样必然造成庞大的布线系统。目前,国外许多整车制造厂和汽车电器制造厂家在整车管理系统中采用了网络技术,如CAN和LIN、SAEJ1850等。其中,CAN的使用较为广泛。CAN总线是德国BOSCH公司于20世纪80年代初提出的,它将汽车上各种信号的接线只用2根简洁的电缆线取代,汽车上的各种电子装置通过CAN控制器挂到这2根电缆上,设备之间利用电缆进行数据通讯和数据共享,从而大大减少了汽车上的线束。CAN总线结构独特,性能可靠,被公认为是最有前途的现场控制总线之一。 由于客观条件的限制,目前我国的整车制造厂和汽车电子电器厂几乎没有涉及到汽车电器网络化设计的领域。但随着我国汽车工业和电子工业的发展,进行汽车电器的网络化研究与开发已经成为十分重要的课题。 1、整车管理系统总体结构设计 汽车上各种电器对网络信息传输延迟的敏感性差别很大,发动机控制器、自动变速器控制器、ABS控制器、安全气囊控制器等之间的协调关系所要求的实时性很强,而前后车灯的开关、车门开闭、座位调节等简单事件对信息传输延迟的要求要宽松得多(传输延迟允10ms-100ms),如果将这些功能简单的节点都挂在高速总线上,势必会提高对节点的技术要求和成本,故有必要进行多路总线设计。考虑到与国际上标准的一致性这里采用2条CAN 总线。图1为整车管理系统总体结构 汽车驱动系统中采用高速CAN,信息传输速度达500K-1M bps,其主要连接对象是:发动机、自动变速器、ABS/ASR、安全气囊、主动悬架、巡航系统、电动转向系统及组合仪表信号的采集系统等。驱动系统CAN的控制对象都是与汽车行驶控制直接相关的系统,对信号的传输要求有很强的实时性,它们之间存在着较多的信息交流,而且很多都是连续的和高速的。 车身系统中采用低速CAN,信息传输速率为100K pbs,主要连接对象是:前后车灯控制开关、电动坐椅控制开关、中央门锁与防盗控制开关、电动后视镜控制开关、电动车窗升降开关、气候(空调)控制开关、故障诊断系统、组合开关及驾驶员操纵信号采集系统、仪表显示器等。车身系统CAN的控制对象主要是低速电机、电磁阀和开关器件,它们对信息传输的实时性要求不高,但数量较多,将这些电控单元与汽车驱动系统分开有利于保证驱动系统的实时性;采用低速CAN总线还能增加总线的传输距离,提高抗干扰能力,降低硬件成本。 两条CAN总线相互独立,通过网关服务器进行数据交换和资源共享。中央控制器是整车管理系统的控制核心,也是整车综合控制的基础,主要功能是对各种信息进行分析处理,并
车载网络复习题 一、填空题 1、多路传输系统可分为单线、双线和无线。 2、通信协议的3要素:语法、语义和定时规则。 3、CAN协议支持两种报文,即标准格式和拓展模式。 4、ECU主要由输入接口、微处理器和输出接口组成。 5、PASSAT轿车动力传动系统的CAN-H线颜色为橙黑。 6、一般而言,照明系统属于车载网络等级标准中的A类网络。 7、LIN总线传输特点是传输速度低、结构简单、价格低廉。 8、我们把同时连接多种不同的CAN数据总线的电脑的模块称为网络。 9、MOST采用物理层传输介质,速率可达24.8mpbs的数据传输速度。 10、车载网络系统的故障类型有汽车电源系统引起的故障、链路故障、节点故障。 11、车载网络系统的故障状态有三种错误激活状态、错误认可状态、总线关闭状态。 12、动力传动系统的优先权顺序为ABS单元→发动机单元→自动变速器单元 13、装有CAN-BUS系统的车辆出现故障,维修人员应首先检测汽车多路信息传输系统是否正常。 14、为了可靠地传输数据,通常将原始数据分割成一定长度的数据单元,这就是数据传输的单元,称其为帧_。 1、汽车多路信息传输系统的节点故障将导致信号干扰。 2、独立模块间数据共享的中速网络采用的是B类网络。 3、接口是为两个系统、设备或部件之间连接服务的数据流穿越的界面。 4、CAN数据总线系统由控制器、收发器、两个数据传输终端和两条数据传输线组成。 5、汽车内ECU之间与办公用微机之间的数据传输特征不尽相同,主要差别在于传输频率。 6、网关实际上是一个模块,他工作的好坏决定了不同的总线、模块和网络相互间通信的好坏。 7、接收器在电路尚未准备好或在间歇域期间检测到一个“0”时,会发送过载帧,以延迟数据的传送。 8、错误标志包括主动错误和被动错误两种类型,它们分别是由6 个连续的“显性位”和“隐性位”组成。 9、为了简化线路,提高各电控单元之间的通信速度,汽车制造商开发设计了车载网络系统。 10、在动力传动系统中,数据传递应尽可能快速,以便能及时利用数据,所以需要一个高性能的发送器。 11、一辆汽车不管有多少块电控单元,不管信息容量有多大,每块电控单元都只需引出两条导线共同接在两个节点上,这两条导线就称作数据总线,又称BUS 线。 1、光在光纤内是基于全反射的原理进行无损耗传输的。 2、奥迪LIN总线系统中唯一与CAN数据总线相连的控制单元是Lin控制单元。 3、丰田多路系统中BEAN通信采用单线传输,CAN和AVC-LAN通信采用双线传输。 4、CAN数据传输线中的两条线绞在一起,主要是为了防干扰,保证数据的正确传输。 5、在新款奥迪车型中,信息系统CAN总线通常被MOST总线代替,用来连接多媒体系统装置。 6、奥迪车系的网络管理工作模式有睡眠和唤醒两种,其中睡眠是为了降低静电流的消耗。 7、车载网络系统就是把众多的电控单元连成网络,其信号通过数据总成的形式传输,可以达到信息资源共享的目的。 8、诊断总线用于诊断系统和相应控制单元之间的信息交换,它被用来代替原来的K线或者L线的功能。 9、诊断总线用于诊断仪器和相应控制单元之间的信息交换,它被用来代替原来的K线或者L线的功能(废气处理控制器除外)。 10、POLO汽车中的燃油供给控制装置,用燃油泵继电器和燃油泵供给继电器并联来代替单个集成防撞燃油关闭装置的燃油继电器。 11、在奥迪车载网络系统中,CAN总线的信息传送通过两个逻辑状态“0”和“1”来实现的,每个逻辑状态都对应一个相应的电压值,控制单元利用两条线上的电压差来确认数据。 1、汽车上常用的网络拓扑形式为总线型网络。 2、LLC子层功能包括接收滤波、超载通知、恢复管理。 3、车载网络分为总线形网、星形网和环形网三种。 4、LAN-BUS常用的拓扑结构有3种:星型、环型、树型。 5、LAN常用的拓扑结构有3种:星形、环形、总线型/树形。
《车载网络技术》课程教学标准 课程编码:课程类别:专业素质课 适用专业:汽车电子技术课程管理单位:汽车工程系 学时:42 学分:2 制定日期:2011-03-26 第一次修订日期: 第二次修订日期: ... 1、课程概述 1. 1课程性质 《汽车车载网络技术》属于人才培养方案中四个课程模块中的专业素质课,是汽车电子技术专业的专业主干课,是必修课,《汽车车载网络技术》是一门实践性很强的技术应用型课程,它是来自企业的特色课程。 1.2课程的定位 本课程是汽车电子专业数字技术方向的一门专业方向课。本课程的容包括:汽车电子和车用总线的基础知识,计算机网络和控制总线的基本概念和基础知识,车上网络系统的结构和特点,异步串行通信的基本知识及应用,控制器局域网(CAN)规、常用CAN控制器、CAN 应用系统设计,适用于车上线控系统基于时间触发的网络(TTCAN、TTP/C、byteflight、FlexRey),车上局部连接网络LIN及其应用,以及车上媒体系连接网络MOST等容。通过本课程的学习使学生掌握汽车总线的基本原理,了解汽车总线的应用及开发技术等。本课程的知识为学生毕业设计及今后从事汽车电控系统研究与开发打下坚实的基础。 该课程的学习需要以前修课程《汽车电工技术》、《汽车电子技术》、《汽车单片机技术》、《汽车原理与构造》为前导课程,可将前修课程培养的能力进行运用和深化;该课程为后续课程《毕业设计》以及企业顶岗实习、毕业实践等环节中。该课程与前后续课程共同形成了完整的职业能力培养体系,是实现汽车电子专业人才培养目标的重要环节。 1.3修读条件 具有基本的计算机知识,英语达到国家三级水平。前期必须已经合格修读完电工技术和电子技术等专业基础课程以及汽车单片机技术、汽车电器与电子设备等专业课程。 2、课程目标 2.1 专业能力目标 1)能够对车载网络系统故障进行检测、诊断、分析、修复和排除;
净化产品及企业标准 GB/T 23277-2009 贵金属催化剂化学分析方法汽车尾气净化催化剂中铂、钯、铑量的测定分光光度法 JJG (汽车) 4-1989 CO/HC红外线气体分析仪检定规程 JJG (交通) 047-2004 汽车排气分析仪检定规程 JB 3742-1984 汽车发动机用可换滤芯式机油滤清器壳体及滤芯主要尺寸 JB/T 6852-1993 汽车排气分析器校准用混合气体贮存容器的要求 QC/T 832-2010 水暖式汽车尾气加热器 DB 11105-1998 轻型汽车排气污染物排放标准 QC/T 646.1-2000 汽车粉尘密封性试验粉尘洞法 QC/T 761-2006 汽车空气滤清器接头A型和B型 JJG 688-1990 汽车排放气体测试仪检定规程 JJG 688-2007 汽车排放气体测试仪检定规程 DB50 144.1-2010 汽车内饰材料技术要求第1部分纺织品 DB50 144.2-2010 汽车内饰材料技术要求第2部分人造皮革 QC/T 236-1997 汽车内饰材料性能的试验方法 QC/T 770-2006 汽车用干式空气滤清器总成技术条件 GB/T 22125-2008 汽车配件营销企业经营管理规范 QB/T 2971-2008 汽车装饰用羊剪绒制品 GB/T 18697-2002 声学汽车车内噪声测量方法 GB 11550-1995 汽车座椅头枕性能要求和试验方法 DB12/T 406-2009 汽车用品服务业经营规范 DB43/T 380-2007 汽车用品服务企业星级评定准则 DB12/T 405-2009 汽车配件营销企业经营规范 空调系统相关标准 QC/T 72.1-1993 汽车空调制冷装置性能要求 QC/T 833-2010 汽车空调用压力安全阀技术条件 JASO M321-1999 汽车零部件-空调软管总成 QC/T 658-2000 汽车空调整车降温性能试验方法 QC/T 666.1-2010 汽车空调(HFC-134a)用密封件O形橡胶密封圈 QC/T 657-2000 汽车空调制冷装置试验方法 QC/T 659-2000 汽车空调(HFC-134a)用标识 QC/T 720-2004 汽车空调术语 GB/T 20025.2-2005 汽车空调用橡胶和塑料软管及软管组合件耐制冷剂134a JB/T 6914-1993 汽车空调器性能试验方法 QC/T 708-2004 汽车空调风机技术条件 GB/T 21361-2008 汽车用空调器
汽车网络与总线标准 汽车作为一种交通工具,目前承担起了越来越多的功能。现代科技已经将网际网络、无线连接、个人通讯电子装置、娱乐设备等整合到汽车内部,与动力系统相结合,为乘客提供了前所未有的便利。而这一切都有赖于汽车网络技术,它是汽车电子发展的重要方向之一。 过去,汽车通常采用点对点的通信方式,将电子控制单元及负载设备连接起来。随着电子设备的不断增加,势必造成导线数量的不断增多,从而使得在有限的汽车空间内布线越来越困难,限制了功能的扩展。同时导线质量每增加50 kg,油耗会增加0.2 L/100 km。此外,电控单元并不是仅仅与负载设备简单地连接,更多的是与外围设备及其他电控单元进行信息交流,并经过复杂的控制运算,发出控制指令,这些是不能通过简单地连接所能完成的。而单从线束本身来说,它也是汽车电子系统中成本较高,连接复杂的部件。 随着汽车电子控制单元以及汽车电子装置的不断增多,采用串行总线实现多路传输,组成汽车电子网络,是一种既可靠又经济的做法。同时现代汽车基于安全性和可靠性的要求,正越来越多地考虑使用电控系统代替原有的机械和液压系统。 1.汽车电子网络结构 在汽车内部采用基于总线的网络结构,可以达到信息共享、减少布线、降低成本以及提高总体可靠性的目的。通常的汽车网络结构采用多条不同速率的总线分别连接不同类型的节点,并使用网关服务器来实现整车的信息共享和网络管理,如图1所示。
车身系统的控制单元多为低速马达和开关量器件,对实时性要求低而数量众多。使用低速的总线连接这些电控单元。将这部分电控单元与汽车的驱动系统分开,有利于保证驱动系统通信的实时性。此外,采用低速总线还可增加传输距离、提高抗干扰能力以及降低硬件成本。 动力与传动系统的受控对象直接关系汽车的行驶状态,对通讯实时性有较高的要求。因此使用高速的总线连接动力与传动系统。传感器组的各种状态信息可以广播的形式在高速总线上发布,各节点可以在同一时刻根据自己的需要获取信息。这种方式最大限度地提高了通信的实时性。 故障诊断系统是将车用诊断系统在通信网络上加以实现。 信息与车载媒体系统对于通讯速率的要求更高,一般在2 Mb/s以上。采用新型的多媒体总线连接车载媒体。这些新型的多媒体总线往往是基于光纤通信的,从而可以充足保证带宽。 网关是电动汽车内部通信的核心,通过它可以实现各条总线上信息的共享以及实现汽车内部的网络管理和故障诊断功能。 随着新技术的不断发展,在未来的汽车网络中,还将会有专门用于气囊的安全总线系统,以及X-by-Wire系统。 2.汽车总线标准、协议 国际上众多知名汽车公司早在20世纪80年代就积极致力于汽车网络技术的研究及应用,迄今为止,已有多种网络标准。目前存在的多种汽车网络标准,其侧重的功能有所不同。为方便研究和设计应用,SAE车辆网络委员会将汽车数据传输网划分为A、B、C三类。 A类是面向传感器/执行器控制的低速网络,数据传输位速率通常小于1O kb/s,主要用于后视镜调整,电动窗、灯光照明等控制;B类是面向独立模块间数据共享的中速网络,位速率在10-125 kb/s,主要应用于车身电子舒适性模块、仪表显示等系统;C类是面向高速、实时闭环控制的多路传输网,位速率在125 kb/s-1 Mb/s之间,主要用于牵引控制、先进发动机控制、ABS等系统。 在今天的汽车中,作为一种典型应用,车体和舒适性控制模块都连接到CAN总线上,并借助于LIN总线进行外围设备控制。而汽车高速控制系统,通常会使用高速CAN总线连接在一起。远程信息处理和多媒体连接需要高速互连,视频传输又需要同步数据流格式,这些都可由D2B(Domestic Digital Bus)或MOST(Media Oriented Systems Transport) 协议来实现。无线通信则通过Blue tooth技术加以实现。而在未来的5-10年里,TTP(Time Trigger Protocol)和Flex Ray将使汽车发展成百分之百的电控系统,完全不需要后备机械系统的支持。 但是,至今仍没有一个通信网络可以完全满足未来汽车的所有成本和性能要求。因此,汽车制造商和OEM(Original Equipment Manufacture)商仍将继续采用多种协议(包括LIN、CAN和MOST等),以实现未来汽车上的联网。 (1)A类总线标准、协议 A类的网络通信大部分采用UART(Universal Asynchronous Reveiver/Transmitter)标准。UART使用起来既简单又经济,但随着技术的发展,预计在今后几年中将会逐步在汽车通信系统中被停止使用。而GM公司所使用的E&C(Entertainment and Comfor)、Chrysler 公司所使用CCD(Chrysler Collision Detection)和Ford公司使用的ACP(Audio Control Protocol),现在已逐步停止使用。Toyota公司制定的一种通信协议BEAN(Body Electronics Area Network)目前仍在其多种车型(Clesior、Aristo、Prius和Celica)中加以应用。 A类目前首选的标准是LIN。LIN是用于汽车分布式电控系统的一种新型低成本串行通信系统,它是一种基于UART的数据格式、主从结构的单线12V的总线通信系统,主要用于
汽车网络标准的具体分类 汽车网络标准的具体分类 1 A类网络标准 从目前的发展和使用情况来看,如表2所列,A类网的主要总线是TTP/A( Time Triggered Protocol/A)和LIN(Local Interconnect Network)。 ①TTP/A协议最初由维也纳工业大学制定,为时间触发类型的网络协议,主要应用于集成了智能变换器的实时现场总线。它具有标准的UART,能自动识别加入总线的主节点与从节点,节点在某段已知的时间内触发通信但不具备内部容错功能。 ②LIN是在1999年由欧洲汽车制造商Audi、BMW、DaimlerChrysler、V olvo、V olkswagen 和VCT公司以及Motorola公司组成的LIN协会,共同推出的用于汽车分布式电控系统的开放式的低成本串行通信标准,从2003年开始使用。 LIN是一种基于UART的数据格式、主从结构的单线12 V的总线通信系统,主要用于智能传感器和执行器的串行通信。从硬件、软件以及电磁兼容性方面来看,LIN保证了网络节点的互换性,极大地提高了开发速度,同时保证了网络的可靠性。 LIN协议应用开发的热点集中在美国、欧洲和日本。估计在未来10年,平均每辆车将有LIN 节点20个左右。这样全世界每年将生产12亿个LIN节点。可见,LIN的应用存在着巨大的潜在市场,协议本身也会在不断应用中得到完善。 总之,LIN网络已经广泛地被世界上的大多数汽车公司以及零配件厂商所接受,有望成为事实上的A类网络标准。 2.2 B类网络标准 B类网络的使用情况如表3所列。从目前来看,主要应用的B类总线标准有三种:低速CAN、J1850和V AN。 ①1994年SAE正式将J1850作为B类网络标准协议。最早,SAE J1850用在美国Ford、GM以及Chrysler公司的汽车中;现在,J1850协议作为诊断和数据共享被广泛应用在汽车产品中。但是,J1850并不是一个单一标准。Ford采用的J1850标准,其物理层与GM和Chrysler公司使用的不同;而GM和Chrysler公司在相同的物理层上又使用不同的数据帧格式,并且三个公司使用各自的消息协议。预计在2006年或2007年将停止使用,然后全部转至CAN总线。 ②V AN标准是ISO于1994年6月推出的。它基于ISO115193,主要为法国汽车公司所用。但目前就动力与传动系统而言,甚至在法国也集中在CAN总线上。 ③CAN是德国Bosch公司从20世纪80年代初,为解决现代汽车中众多的控制与测试仪器
北京劳动保障职业学院教师实训课时授课计划
课题号0801 课题名称汽车局域网CANBUS 一.教学目标(讲述,略) 二、教学重点、难点及解决措施 1、教学重点及解决措施(讲述,略) 2、教学难点及解决措施(讲述,略) 三、新课导入 1、相关知识:CANBUS。VAN 2、相关技能:能解决CANBUS故障诊断,维修 四.安全注意事项及育人教育知识点 安全注意事项:(提问,讲述,略) 1.检查设备;电压要正常;汽油无泄露。 2.学生检测前,必须经指导教师用意后才能进行测试;用钥匙启动发动机的操作必须正确。 3.发生短路起火时的处理预案 以最大限度的保证人身安全为出发点,且放在首位 1)切断电源 2)用灭火器灭火 3)组织疏散人员 4)逐级上报 育人教育知识点: 1.培养吃苦耐劳精神 2.严肃认真 五.工具,设备,环境,场地 1.工具准备:通用工具;专用工具。 2.设备准备、介绍: 1)B5CAN舒适系统电控实验台: 功用:(讲述,略) 构造:(讲述,略) 原理:(讲述,略) 使用方法:(讲述,略) 维护和保养:(讲述,略) 六.理论学习 随着汽车技术的发展,在汽车上采用的计算机微处理芯片数量越来越多,多个处理器之间相互连接、协调工作并共享信息构成了汽车车载电脑网络系统(图1)。
1—ABS模块;2—动力系统控制模块(PCM);3—电子自动温度控制(EA TC);4—集成控制板(ICP);5—虚像组合仪表;6—照明控制模块(LCM);7—驾驶员座椅模块(DSM); 8—驾驶员车门模块(DDM);9—移动电话模块;10—汽车动态模块 1 微处理器(MCU或CPU) 从1975年摩托罗拉公司为GM生产第一个微处理器68009应用在1978年Cadillac汽车上计程)开始到目前,汽车上的微处理器类型已经逐渐由8位、16位发展到32位,CPU的结构也由RISC逐渐取代CISC,最近推出了16/32位RISC微控制器的M.Core TM平台。 最近各汽车公司推出的新车型,多数都采用了可编程(FLASH)的32位芯片。IBM和INTEL宣布合作开发的车载计算机平台将采用奔腾MMX处理器,控制功能由简单的计程向复杂的高端应用领域拓展。 2 汽车网络互连标准 为了解决信息共享、减少布线问题以及满足政府排放法规要求,汽车制造商和相关组织开发了汽车网络,目前主要的汽车网络互连规范有德国BOSCH最早开发推出的欧洲规范CAN和美国汽车工程师协会(SAE)开发的美国规范J1850。其他的总线类型(如;V AN、TTP等)在汽车内部网络也有使用,不过CAN和J1850基本上已经成为事实上的标准。IDB (ITS data bus)为汽车网络拓展提供了标准。 2.1 CAN标准 控制器局域网CAN(Controller Area Network)是由德国BOSCH公司于1986年提出并推广应用的,按照ISO的有关部门规定,CAN拓扑结构为总线式,所以也称CAN总线。最初为CAN总线1.0版,1990年推出CAN总线1.2修订版,1991年推出CAN总线2.0版。目前,CAN总线不但已经成为汽车总线的主要互连规范,而且被公认为最有前途的几种工业现场总线之一,已由ISO TC22技术委员会批准为国际标准,是唯一被批准为国际标准的现场总线。1993年国际CAN用户及制造商组织(简称CIA)在欧洲成立,主要作用是解决CAN总线实际应用中的问题,提供CAN产品及其开发工具,推广CAN总西南的应用。 控制单元1控制单元2
车载网络复习题 一、填空题 1、多路传输系统可分为 单线 、双线 和无线 。 2、通信协议的 3要素:语法 、语义 和定时规则 。 3、CAN 协议支持两种报文,即 标准格式 和拓展模式 。 4、ECU 主要由输入接口 、微处理器 和输出接口 组成。 5、PASSAT 轿车动力传动系统的 CAN-H 线颜色为橙黑 。 6、一般而言,照明系统属于车载网络等级标准中的 A 类网络 。 7、LIN 总线传输特点是 传输速度低 、结构简单 、价格低廉 。 8、我们把同时连接多种不同的 CAN 数据总线的电脑的模块称为 网络 。 9、MOST 采用 物理层 传输介质,速率可达 24.8mpbs 的数据传输速度。 10、车载网络系统的故障类型有 汽车电源系统引起的故障 、链路故障、节点故障 。 11、车载网络系统的故障状态有三种 错误激活状态、错误认可状态、总线关闭状态 。 12、动力传动系统的优先权顺序为 ABS 单元 →发动机单元 →自动变速器单元 13、装有CAN-BUS 系统的车辆出现故障,维修人员应首先检测 汽车多路信息传输系统 是否正常。 14、为了可靠地传输数据,通常将原始数据分割成一定长度的数据单元,这就是数据传输的单元,称其为 帧_。 1、汽车多路信息传输系统的节点故障 将导致 信号干扰。 2、独立模块间数据共享的中速网络采 用的是 B 类网络。 3、接口是为两个系统、设备或部件之间连接服务的数据流穿 越的界面。 4、CAN 数据总线系统由控制器、收发器、两个数据传输终端和两条数据传输线 组成。 5、汽车内ECU 之间与办公用微机之间的数据传输特征不尽相同,主 要差别在于 传输频率。 6、网关实际上是一个模块,他工作的好坏决定了 不同的 总线、模块和网络相互间通信的好坏。 7、接收器在电路尚未准备好或在间歇域期间检测到一个“ 0”时,会发送过载帧,以延迟数据的传送。 8、错误标志包括 主动错误 和被动错误 两种类型,它们分别是由 6个连续的“显性位”和“隐性位”组 成。 9、为了简化线路 ,提高各电控单元之间的 通信速 度 ,汽车制造商开发设计了车载网络系统。 10、在动力传动系统中,数据传递应尽可能 快速,以便能及时利用数据,所以需要 一个 高性能的发送器。 11、一辆汽车不管有多少块电控单元,不管信息容量有多大,每块 电控单元 都只需引出两条导线共同接在两个 节点上,这两条导 线就称作数据总线,又 称 BUS 线。 1、光在光纤内是基于全反 射 的原理进行无损耗传输的。 2、奥迪LIN 总线系统中唯一与 CAN 数据总线相连的控制单 元是 Lin 控制单元。 3、丰田多路系统中BEAN 通信采用单线传输,CAN 和AVC-LAN 通信采用双线传输。 4、CAN 数据传输线中的两条线绞在一起,主要是为了 防干扰,保证数据的正确传输。 5、在新款奥迪车型中,信 息系统 CAN 总线通常被MOST 总线代替,用来连接多媒体系统装置。 6、奥迪车系的网络管理工作模式有 睡眠和唤醒两种,其中睡眠是为了降低静电流的消耗。 7、车载网络系统就是把众多的 电控单元 连成网络,其信号通过 数据总成 的形式传输,可以达到信息资源共享的目的。 8、诊断总线用于诊断系统和相应控制单元之间的信息交换,它被用来代替原来的 K 线或者L 线的功能。 9、诊断总线用于诊断仪器和相应控制单元之间的信息交换,它被用来代替原来的 K 线或者L 线的功能(废气处理控制器除外)。 10、POLO 汽车中的燃油供给控制装置,用 燃油泵继电器和燃油泵供给继电器 并联来代替单个集成防撞燃油关闭装置的燃油继电器。 11、在奥迪车载网络系统中,CAN 总线的信息传送通过两个逻辑状态 “0”和“1”来实现的,每个逻辑状态都对应一个相应的电压值, 控制单元利用两条线上的电压差来确认数据。
河南机电高等专科学校 《汽车单片机与局域网技术》 大作业 专业班级:汽电112 姓名:史帅峰 学号:111606240 成绩: 指导老师:袁霞 2013年4月16日 汽车总线系统通信协议分析与比较 摘要:本文主要针对汽车总线系统通讯协议,探讨汽车总线通讯协议的种类、发展趋势以及技术特点。在对诸多组织和汽车制造商研发的各类汽车总线进行比较和探讨的基础上,对其现状进行了分析;并综合汽车工业的特点对这两大类汽车总线协议的发展前景作了分析。关键词:汽车总线技术通讯协议车载网络 引言:汽车电子技术是汽车技术和电子技术结合发展的产物。从20世纪60年代开始,随着电子技术的飞速发展,汽车的电子化已经成为公认的汽车技术发展方向。在汽车的发展过程中,为了提高汽车的性能而增加汽车电器,电器的增加导致线缆的增加,而线束的增加又使整车质量增加、布线更加复杂、可维护性变差,从而又影响了汽车经济性能的提高。因此,一种新的技术就被研发出来,那就是汽车总线技术。总线技术在汽车中的成功应用,标志着汽车电子逐步迈向网络化。 一、车载网络的发展历程 20世纪80年代初,各大汽车公司开始研制使用汽车内部信息交互的通信方式。博世公司与英特尔公司推出的CAN总线具有突出的可靠性、实时性和灵活性,因而得到了业界的广泛认同,并在1993年正式成为国际标准和行业标准。TTCAN对CAN协议进行了扩展,提供时间触发机制以提高通讯实时性。TTCAN的研究始于2000年,现已成为CAN标准的第4部分ISO11898-4,该标准目前处于CD(委员会草案)阶段。 1994年美国汽车工业协会提出了1850通信协议规范。从1998年开始,由宝马、奥迪等七家公司和IC公司共同开发能满足车身电子要求的低成本串行总线技术,该技术在2000年2月2日完成开发,它就是LIN。 FlexRay联盟推进了FlexRay的标准化,使之成为新一代汽车内部网络通信协议。FlexRay车载网络标准已经成为同类产品的基准,将在未来很多年内,引导整个汽车电子产品控制结构的发展方向。FlexRay是继CAN和LIN之后的最新研发成果。 车载网络的分类及其网络协议 从20世纪80年代以来不断有新的网络产生,为了方便研究和应用,美国汽车工业协会(SAE)的车辆委员会将汽车数据传输网络划分为A、B、C三类。 A类网络 A类网络是面向传感器/执行器控制的低速网络,数据传输速度通常小于10kb/s,主要用于后视镜调整、电动车窗、灯光照明等控制。 A类网络大都采用通用异步收发器(UART,Universal Asynchronous Receiver/Trsmitter)标准,使用起来既简单又经济。但随着技术水平的发展,将会逐步被其他标准所代替。 A类网络目前首选的标准是LIN总线,是一种基于UART数据格式、主从结构的单线12V总线通信系统,主要用于智能传感器和执行器的串行通信。
汽车安全使用规范(新订版) Standard text of safety management ( 安全管理规范 ) 单位名:_________________________ 负责人:_________________________ 日期:_________________________ 适用于工作计划/工作汇报/新年计划/全文可改
汽车安全使用规范(新订版) 10月18日,第八届电动汽车标准法规国际研讨会在浙江嘉兴举行。来自工业和信息化部、国家标准委、中国汽车技术研究中心等部门的300余名专家和业内人士,就电动汽车安全、行业标准规范等问题展开研讨。 来自中国汽车工业协会的数据显示,今年1月至9月份我国新能源乘用车销售21万辆,同比增长122%。其中纯电动车销售14.5万辆,增长170%;插电式混合动力汽车销售6.5万辆,增长60%。从2009年至2015年,我国新能源汽车累计产量已达50万辆,成为全球最大的新能源汽车市场。 清华大学节能与新能源汽车中心副主任、浙江合众新能源汽车有限公司董事长方运舟在接受《经济日报》记者采访时表示,世界知名品牌特斯拉、沃蓝达、菲斯克以及国内比亚迪、众泰等品牌都
出现过电动汽车起火事件,此类危险相对于传统汽车来说更容易危及乘员的生命安全。可以说安全问题是阻碍电动汽车行业发展的重要因素。 针对电动汽车的安全问题,包括中国在内的多个汽车工业大国都制订了一系列的标准与法规。据国家标准委工业标准一部副主任杨立新介绍,目前我国电动汽车国家标准、行业标准总数已达80多项,涵盖了整车、关键总成、接口与界面等多个领域。 多位专家提出,目前国内电动汽车安全问题主要体现在电池使用、材料构成和充电安全方面。上下游产业发展不平衡、企业盲目重量轻质是造成这些问题的主要因素。此外,监管存在漏洞、政府相关政策不全。 中国汽车技术研究中心高级工程师、全国清洁汽车行动协调领导小组专家组组长王秉刚认为,保障电动汽车安全必须在生产过程中严格执行安全要求和标准。电动汽车的安全是设计制造出来的,更是管理出来的。方运舟则表示,电动汽车产业链上的相关企业必须严抓质量环节、创新技术、加强监管监控、不能冒进求成。政府
XX职业技术学院机电系课程标准 车载网络技术课程标准 1.课程基本信息 课程代码:84347 适用专业:汽车检测与维修技术专业 学时数:54 学分: 3 先修课程:《汽车电工电子技术》《汽车单片机技术》《汽车原理与构造》 后续课程: 2.课程性质 《汽车车载网络技术》属于人才培养方案中四个课程模块中的专业素质课,是汽车检测与维修技术专业的能力拓展必修课,《汽车车载网络技术》是一门实践性很强的技术应用型课程,它是来自企业的特色课程。 该课程的学习需要以前修课程《汽车电工技术》、《汽车电子技术》、《汽车单片机技术》、《汽车原理与构造》为前导课程,可将前修课程培养的能力进行运用和深化;该课程为后续课程《毕业设计》以及企业顶岗实习、毕业实践等环节中。该课程与前后续课程共同形成了完整的职业能力培养体系,是实现汽车维修专业人才培养目标的重要环节。本课程的知识为学生毕业设计及今后从事汽车电控系统研究与开发打下坚实的基础。 3.课程教学目标 3.1 能力目标 A1.能够对车载网络系统故障进行检测、诊断、分析、修复和排除; A2.能够正确使用汽车车载网络系统各种检测、维修设备和工具; A3.能够正确使用和养护汽车车载网络系统,保障工作性能良好; A4.通过汽车车载网络系统常见故障检测、诊断、维修,积累排除汽车故障技术工作经验,提高检测、分析、维修汽车故障能力; A5.通过汽车车载网络系统各种检测、维修设备和工具的正确使用,养成正确、安全、规范使用设备工具的意识,提高善于使用设备工具的能力; A6.通过教学以学生为中心,边做边学,在做中学习,提高学生适应工作环境能力,提高自主学习能力,提高理论联系实际能力。
《国家车联网产业标准体系 建设指南(智能网联汽车)(2017)》 编制说明 一、背景与概述 (一)定义与内涵 智能网联汽车(Intelligent&Connected Vehicles,简称“ICV”)是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。 (二)国内外技术及产业发展现状 作为汽车与信息、通信等产业跨界融合的重要载体和典型应用,智能网联汽车代表了汽车技术和产业未来发展的方向,也是国际汽车产业未来竞争的重要阵地。包括欧、美、日在内的汽车工业发达国家和地区都将智能网联汽车作为汽车产业未来发展的重要方向,通过加强共性技术研发、示范运行、标准法规、政策鼓励等综合措施引导和促进产业发展,并在智能网联汽车发展方面构建了协调、协作机制。 在规划和战略层面,美国从上世纪九十年代初开始,通过实施
“智能交通系统(ITS)”项目,支持智能网联汽车相关技术和产业发展,2009年和2014年分别以网联化和自动驾驶为重点发布战略研究计划,并于2016年发布自动驾驶汽车政策指南。欧盟议会早在1984年即通过关于道路安全的决议,并于1988年正式启动了“车辆安全专用道路设施(DRIVE)”项目,持续资助对智能网联汽车相关技术研发和应用。2015年,欧盟发布GEAR2030战略,聚集汽车、IT、通信、保险和政府等方面,重点关注高度自动化和网联化驾驶领域等推进及合作。日本政府也将自动驾驶和车车通信作为重要方向和目标,通过车辆信息与通信系统(VICS)、先进安全汽车(ASV)等项目支持技术研发与应用。2014年,日本发布《战略性创新创造项目(SIP)》,将自动驾驶作为十大战略领域之一。 在技术和产品层面,欧、美、日等国家和地区的整车企业,如奔驰、宝马、沃尔沃、通用、福特、特斯拉、丰田、日产等已经实现先进驾驶辅助系统,正在普及推动PA级自动驾驶产品的商业化,部分高端品牌已计划推出CA级自动驾驶产品;各国在整个产业链上的合作日益加强,相互持股与并购的情况日益普遍,通信、信息、电子、整车等行业深度融合发展。美国在网联化技术、智能控制技术、芯片技术等方面处于优势地位,产业上、中、下游实力均衡,欧洲拥有强大的汽车整车及零部件企业,日本则在智能安全技术应用上较为领先。 我国政府高度重视智能网联汽车相关技术及产业发展,工业和信息化部、发展改革委、科技部等相关政府部门,先后安排专项资
随着汽车技术日新月异的发展,以及电子技术和控制技术在汽车上的大量应用,汽车上采用的电子控制模块越来越多。由原来的几块发展到现在的几十块,显然传统的数据传输方式已不能满足模块间数据传输的要求。新型汽车的控制系统中采用了一种新型的数据传输网络,英文缩写为CAN(ControllerAreaNetwork),其目的是使汽车控制系统的数据传输实现高速化,并使汽车控制系统简单化。新型大众POLO乘用车即采用了这种局城网络控制系统。 一、CAN数据传输系统的组成与工作原理 CAN数据传输系统将传统的多线传输系统改变为双线(总线)传输系统(如图1所示)。这样一辆汽车不论有多少控制模块,也不管其信息容量有多大,每个控制模块都只需引出两条线接在两个节点上,这两条导线称为数据总线。数据总线好比一条信息高速公路,信息通过在高速公路上行驶的BUS来传递,所以CAN数据传输系统又称为CAN-BUS。 1.CAN数据传输系统的组成 CAN数据传输系统中的每个控制单元内部都含有一个CAN控制器和一个CAN收发器。
每个控制单元之间都通过两条数据总线连接。在数据总线两端都装有数据传输终端。由此不难看出,CAN数据传输系统由以下四部分组成: ⑴CAN控制器 CAN控制器的作用是接收控制单元中微处理器发出的数据,处理数据并传给CAN收发器。同时,CAN控制器也接收CAN收发器收到的数据,处理数据并传给微处理器。 ⑵CAN收发器 CAN收发器是一个发送器和接收器的结合,它将CAN控制器提供的数据转化为电信号并通过数据总线发送出去;同时,它也接收CAN总线数据,并将数据传输给CAN控制器。 ⑶数据传输终端 数据传输终端实际上是一个电阻器,其作用是保护数据,避免数据传输到终端被反射回来而产生反射波。 ⑷CAN数据总线 CAN数据总线是传输数据的双向数据线,分为高位数据线和低位数据线。为了防止外界电磁波干扰和向外幅射,CAN数据总线通常缠绕在一起。这两条线上的电位和是恒定的,如果一条线上的电压是5V,则另一条线上的电压为0。 2.CAN数据传输系统的工作原理 控制单元向CAN控制器提供需要发送的数据,这种数据由二进制数构成,即“0”或“1”,“1”表示电路接通,“0”则表示断开。也就是说1位数字可表示2种状态,2位数则可表示4种状态;3位数可表示8种状态,依此类推,最大的数据是64位,它可表示的信息量为2的64次方,等于1.8乘以10的19次方。用数字表达温度信息的实例见表1。
汽车车载网络技术及其应用 【摘要】随着信息技术的飞速发展,汽车功能越来越完善,汽车设计也更加人性化。汽车上的电子设备数量急剧增加,使得各设备之间的连接和通讯越来越困难。如何解决电气设备的增加与设备间通讯差、传输效率低的矛盾已成为汽车工程师急需解决的问题。本文介绍了汽车车载网络的分类、主要网络协议及其应用情况,指出了今后汽车网络研究的动向。 【关键词】汽车;车载网络;数据总线;应用 随着汽车电子化程度的不断提高,电子控制单元的大量引入,汽车综合控制系统中大量的控制信号需要实时交换,传统线束已远远不能满足这种需求。从20世纪80年代起,众多国际知名汽车公司、电子元器件公司及科研机构针对上述问题,在借鉴计算机网络技术和现场总线技术的基础上,开发出各种适用于汽车环境的汽车网络技术。目前车载网络主要应用在车身控制系统、动力传递系统、信息系统和安全系统等领域。车载网络系统已成为汽车构造的一个重要组成部分。 1.车载网络技术及类型 1.1车载网络 车载网络是计算机网络技术与自动化控制技术相结合产生的新兴技术领域,它支持汽车向智能化发展。人们把所有点对点连接映射为一个通信介质(总线),所有电子控制单元(ECU)共享总线、数据以位连续的形式传输,总线网络由此产生。 1.2汽车车载网络的类型 汽车车载网络系统的分类很多,类型也不完全相同。美国汽车工程协会(SAE)根据数据传输速度的高低,定义了3类网络,其中,A类网络为面向传感器、执行器的低速网络;B类网络为面向数据共享的中速网络;C 类网络为面向实时控制的高速网络,数据传输网络如表1所示。 近年来,汽车行业迅猛发展,世界各大汽车研究所加大了汽车研究力度,汽车厂商加大研究成本推出了许多新的汽车通用协议。现今的汽车通用协议很难归类到原先的SAE定义的三类网络中。现今网络大致分为5类,借鉴SAE的分类方式,可将这五类网络称为A、B、C、D、E类网络协议。 1.2.1 A类网络协议 A类网络有多种通信协议,根据目前发展和使用的状况,该类网络的主流协议将是LIN。LIN是用于连接智能传感器、执行器的低成本串行通信网络。LIN
汽车网络(总线)技术课程教学大纲 课程编码:11111733 理论学时:26 学分:2 适用专业:车辆工程、交通运输 一、课程的性质和任务 1.课程的性质 本课程是车辆工程专业的学科必修课程。 2.课程的任务及目的 本课程在简要介绍汽车网络技术的基本原理和发展趋势之后,重点讲述CAN总线、光学总线(MOST和byteflight)、子总线(LIN、K总线协议、BSD总线、蓝牙技术)、以太网、FlexRay、网关与诊断总线的结构组成和工作原理,对典型车系的汽车网络系统及其故障诊断、检测、维修等实用内容也作了充分的讲授。 通过本课程的学习,使学生进一步深化对汽车网络技术的理解和认识,熟悉汽车网络技术在汽车上的具体应用以及不同车型、不同车系的网络技术特点,深刻认识和体会汽车网络系统的故障规律和故障特点,构建和积累初步的汽车网络系统检测诊断经验,切实培养和提高汽车网络系统故障检测诊断的实际工作能力。 二、课程的内容和学时分配 (一)学时分配
(二)理论教学内容的基本要求、重点和难点 1.绪论 (1)了解汽车网络技术的产生背景、汽车网络技术的发展历程以及汽车网络标准与协议; (2)熟悉汽车网络的分类、汽车网络技术的应用概况; (3)掌握汽车网络技术的发展趋势——T elematics。 重点:汽车网络的分类及汽车网络技术的发展趋势。 2.CAN总线 (1)了解CAN总线的工作原理; (2)熟悉CAN总线的具体应用; (3)掌握CAN总线的检测方法。 重点:CAN总线的具体应用及检测方法。 3.光学总线 (1)熟悉光学总线(MOST和byteflight)的数据传输原理和特点; (2)掌握光学总线(MOST和byteflight)的具体应用和光导纤维的使用与维修技能。 重点:光学总线(MOST和byteflight)的具体应用和光导纤维的使用与维修技能。 难点:光波传输系统信号衰减的检测及光导纤维接头的制作。
《汽车车载网络系统检修期末试卷》 一、填空题(每空1分,共计22分) 1、车载网络系统就是把众多的___________连成网络,其信号通过___________的形式传输,可以 达到信息资源共享的目的。 2、由于汽车不同控制器对CAN总线的性能要求不同,大众汽车的CAN总线系统设定为_________、 _________、_________、__________和__________五个局域网。 3、诊断总线用于_________和相应_________之间的信息交换,它被用来代替原来的K线或者L线的功能。 4、光在光纤内是基于_________的原理进行无损耗传输的。 5、奥迪LIN总线系统中唯一与CAN数据总线相连的控制单元是__________。 6、POLO汽车中的燃油供给控制装置,用____________和____________并联来代替单个集成防撞燃油关闭装置的燃油继电器。 7、CAN数据传输线中的两条线绞在一起,主要是为了_________,保证数据的正确传输。 8、在新款奥迪车型中,信息系统CAN总线通常被__________代替,用来连接多媒体系统装置。 9、在奥迪车载网络系统中,CAN总线的信息传送通过两个逻辑状态____________________来实现 的,每个逻辑状态都对应一个相应的电压值,控制单元利用两条线上的________来确认数据。 10、网关安装在手套箱后面的模块架上或集成在仪表内,网关是整车不同总线间、__________和与 总线系统相连的__________间的接口。 11、CAN数据总线由______________、______________、两个数据传输终端和 _________________________________组成。 二、选择题(每题2分,共计20分) 1、使用车载网络系统的优点,不正确的是() A.布线简化,降低成本 B.电控单元间交流更加简单和快捷 C.传感器数目增多,传输更方便 D.提高汽车总体运行的可靠性 2、在汽车网络结构中,车身系统的控制单元可采用()的总线连接。 A.低速B.中速C.高速 3、在数据帧的开始域中,把带有约______V的电压1位和______V的电压1位分别送到CAN高位和地