(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920523390.9
(22)申请日 2019.04.17
(73)专利权人 西安航天计量测试研究所
地址 710100 陕西省西安市15号信箱7分箱
(72)发明人 马车 常莹 赵米峰 张永攀
杨建
(74)专利代理机构 西安智邦专利商标代理有限
公司 61211
代理人 汪海艳
(51)Int.Cl.
G01B 11/06(2006.01)
(ESM)同样的发明创造已同日申请发明专利
(54)实用新型名称
一种高精度激光测量系统
(57)摘要
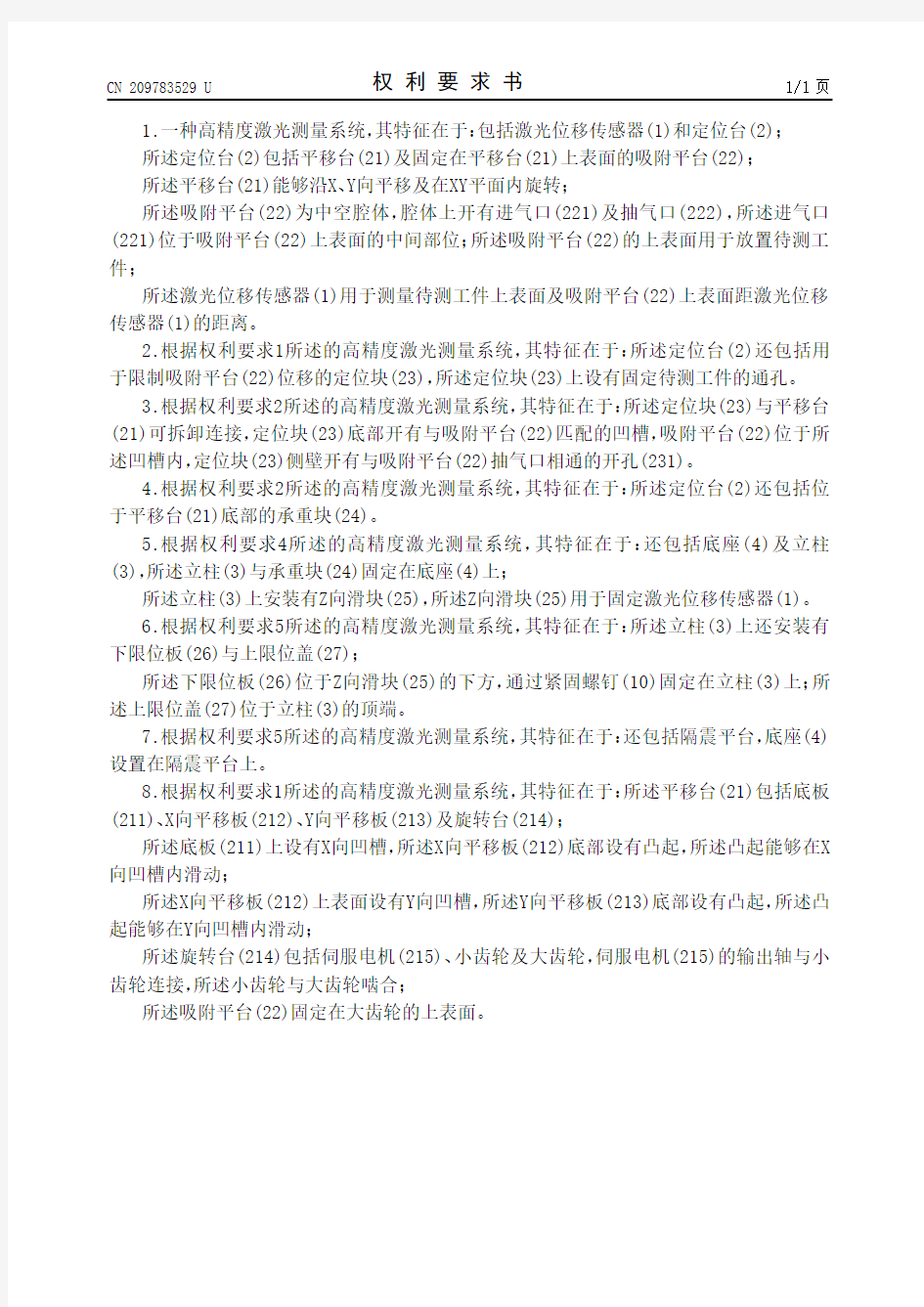
本实用新型属于精密测量技术领域,公开了
一种高精度激光测量系统,可应用于包括液体火
箭发动机微小零部件在内的其他工件的厚度测
量。包括底座、紧固螺钉、下限位板、Z向滑块、立
柱、上限位盖、承重块、平移台、定位块、吸附平台
以及激光位移传感器。底座上安装有立柱和承重
块;立柱上分别是上限位盖、下限位板和Z向滑
块;Z向滑块和下限位板分别通过紧固螺钉进行
夹紧固定,而上限位盖通过自身的螺纹与立柱旋
紧;激光位移传感器通过Z向滑块支撑;平移台、
吸附平台和定位块通过螺钉与承重块相连接。本
专利装置具备高精度(测量不确定度U≤5μm)测
量工件厚度的能力。权利要求书1页 说明书4页 附图3页CN 209783529 U 2019.12.13
C N 209783529
U
权 利 要 求 书1/1页CN 209783529 U
1.一种高精度激光测量系统,其特征在于:包括激光位移传感器(1)和定位台(2);
所述定位台(2)包括平移台(21)及固定在平移台(21)上表面的吸附平台(22);
所述平移台(21)能够沿X、Y向平移及在XY平面内旋转;
所述吸附平台(22)为中空腔体,腔体上开有进气口(221)及抽气口(222),所述进气口(221)位于吸附平台(22)上表面的中间部位;所述吸附平台(22)的上表面用于放置待测工件;
所述激光位移传感器(1)用于测量待测工件上表面及吸附平台(22)上表面距激光位移传感器(1)的距离。
2.根据权利要求1所述的高精度激光测量系统,其特征在于:所述定位台(2)还包括用于限制吸附平台(22)位移的定位块(23),所述定位块(23)上设有固定待测工件的通孔。
3.根据权利要求2所述的高精度激光测量系统,其特征在于:所述定位块(23)与平移台(21)可拆卸连接,定位块(23)底部开有与吸附平台(22)匹配的凹槽,吸附平台(22)位于所述凹槽内,定位块(23)侧壁开有与吸附平台(22)抽气口相通的开孔(231)。
4.根据权利要求2所述的高精度激光测量系统,其特征在于:所述定位台(2)还包括位于平移台(21)底部的承重块(24)。
5.根据权利要求4所述的高精度激光测量系统,其特征在于:还包括底座(4)及立柱(3),所述立柱(3)与承重块(24)固定在底座(4)上;
所述立柱(3)上安装有Z向滑块(25),所述Z向滑块(25)用于固定激光位移传感器(1)。
6.根据权利要求5所述的高精度激光测量系统,其特征在于:所述立柱(3)上还安装有下限位板(26)与上限位盖(27);
所述下限位板(26)位于Z向滑块(25)的下方,通过紧固螺钉(10)固定在立柱(3)上;所述上限位盖(27)位于立柱(3)的顶端。
7.根据权利要求5所述的高精度激光测量系统,其特征在于:还包括隔震平台,底座(4)设置在隔震平台上。
8.根据权利要求1所述的高精度激光测量系统,其特征在于:所述平移台(21)包括底板(211)、X向平移板(212)、Y向平移板(213)及旋转台(214);
所述底板(211)上设有X向凹槽,所述X向平移板(212)底部设有凸起,所述凸起能够在X 向凹槽内滑动;
所述X向平移板(212)上表面设有Y向凹槽,所述Y向平移板(213)底部设有凸起,所述凸起能够在Y向凹槽内滑动;
所述旋转台(214)包括伺服电机(215)、小齿轮及大齿轮,伺服电机(215)的输出轴与小齿轮连接,所述小齿轮与大齿轮啮合;
所述吸附平台(22)固定在大齿轮的上表面。
2
液位检测与控制试验系统设计 1.发展现状: 液位检测在许多控制领域已较为普遍,各种类型的液位检测装置也不少,按原理分有浮力式、压力式、超声波式、差压式、电容式等,这各种方法都根据其需要设计完成,其结构、量程和精度各有特色, 适用于各自的场合, 但都是基于固定液箱液位检测而设计。市面上也有现成的液位计,有投入式、浮球式、弹簧式等,绝大多数价格惊人。 “水是生命之源”,不仅人们生活以及工业生产经常涉及到各种液位和流量的控制问题,例如饮料、食品加工,居民生活用水的供应,溶液过滤,污水处理,化工生产等多种行业的生产加工过程,通常要使用蓄液池。蓄液池中的液位需要维持合适的高度,太满容易溢出造成浪费,过少则无法满足需求。因此,需要设计合适的控制器自动调整蓄液池的进出流量,使得蓄液池内液位保持正常水平,以保证产品的质量和生产效益。这些不同背景的实际问题都可以简化为某种水箱的液位控制问题。因此液位是工业控制过程中一个重要的参数。特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的生产效果。高老师也进行了多次的实验得出了一些相关的数据,水箱液位控制系统的设计应用非常长广泛,可以把一个复杂的液位控制系统简化成一个水箱液位控制系统来实现。所以就选择了该题目的设计。由于液位检测应用领域的不同,性能指标和技术要求也有差异,但适用有效的测量成为共同的发展趋势,随着电子技术及计算机技术的发展,液位检测的自动控制成为其今后的发展趋势,控制过程的自动化处理以及监控软件良好的人机界面,操作人员在监控计算机上能根据控制效果及时修运行参数,这样能有效地减少工人的疲劳和失误,提高生产过程的实时性、安全性。随着计算机控制技术应用的普及、可靠性的提高及价格的下降,液位检测的微机控制必将得到更加广泛的应用。 所以,我们在此设计了这个简易的监测系统,一方面,节省了大量的经济开支;另一方面,让我们对监测系统有了更加深刻、透彻的了解,不仅增加了我们的感性认识,还促进了我们对于系统各个部分的深刻剖析,从传感器选型到整个
色差仪的分类,原理及测量方法 1.分类 根据性能参数、精度范围和使用要求,色差仪可分为3种:第一种是手持 式色差仪,又称色彩色差计,其能直接读取数据,不用连接电脑,不配带软件,使用方便,价格便宜,但精度较低,在颜色管理的一般领域使用广泛;第二种 是便携式色差仪,又称便携式分光测色仪,其除了能直接读取数据外,还能连 接电脑,配带软件,体积较小,便于携带,精度较高,价格适中;第三种是台 式色差仪,又称台式分光测色配色仪,其具有读数窗口,连接电脑时需要使用 测色、配色软件,具有高精度的测色和配色功能,体积较大,性能稳定,价格 较高。目前,国内印刷企业使用较广的是便携式色差仪。 2.原理 色差仪是模拟人眼对红、绿、蓝光感应的光学测量仪器,可以对被测物体 进行五角度分析,其中习惯选择15°、45°、110°的角度进行分析。 所有的颜色都可以通过任何一种Lab颜色标尺被感知并测量,L轴为亮度轴,0为黑,100为白;a轴为红绿轴,正值为红,负值为绿,0为中性色;b 轴为黄蓝轴,正值为黄,负值为蓝,0为中性色。这些标尺可以用来表示试样 与标样的颜色差异,通常以Δa、Δb、ΔL为标识符,ΔE被定义为样品的总色差,但其不能表示出试样色差的偏移方向,ΔE数值越大,说明色差越大。色差仪可以根据CIE色度空间的Lab、Lch原理,测量显示出试样与标样的色差ΔE及Δa、Δb、ΔL值。
ΔE通常按如下公式计算: ΔE*=[(ΔL*)+(Δa*)+(Δb*)]1/2 有时一些公司会要求总色差小于2,有的还会要求达到Lab值。如果ΔE≤2.0,建议Δa、Δb、ΔL均≤1.5,一般ΔE为1.5时目视是可以分辨的。由于Δa、Δb、ΔL一般情况下均没有定值,在要求过于严格的情况下,往往对总色差ΔE 和色差Δc(不考虑亮度影响)都有要求,此时可按如下公式计算:ΔE*=[(ΔL*)+(Δa*)+(Δb*)]1/2 Δc*=[(Δa*)+(Δb*)]1/2 具体测量方法 在实际操作中,我们将测量出的数据在图1上标示为一个静态的坐标点(称为起始点)。在印刷过程中要想保证印刷品色相的稳定性,就需要调墨工 人随时调整油墨配比和黏度,这样在每次调整后再测量,就可以在坐标图上标 示出另外的一些坐标点(冲淡点、点黑加重点等),每次调整前后形成的两个 不同的坐标点之间都会有一定的移动方向和距离(沿坐标a轴、b轴距离不等,因产品而定)。如果我们将这个数值与色差仪上显示的Δa、Δb、ΔL、ΔE等数据结合在一起,在图1上就会显示成一系列动态的点,那么,这些动态点之间 的方向和距离在实际操作中就成了调墨工人调色时所应添加哪一种或哪几种色 墨及其添加量的定性和定量参考,相当于日常调墨工作中的指南针和测量尺。
中华人民共与国农业部部标准米质测定方法 2010-1-30 1适用范围 本标准适用于食用稻米品质得测定。 2引用标准 GB 2905谷类、豆类作物种子粗蛋白质测定法(半微量凯氏法) GB 3523 谷类、油料作物种子水分测定法 GB 4801 谷类籽粒赖氨酸测定法染料结合赖氨酸(DBL)法 GB 5495 粮食、油料检验稻谷出糙率检验法 GB 7648 水稻、玉米、谷子籽粒直链淀粉测定法 NY 122 优质食用稻米 3样品得准备 3、1稻谷在收获晒干后须存放三个月以上,待理化性状稳定后,方可进行分析。 3、2 加工得稻谷须扬净稻草、瘪粒,并除去砂石、泥块、铁屑等混杂物。稻谷品种纯度不得低于99、0%。 3、3 待测样品须放于干燥通风处或有空调得实验室内1周左右,使样品得水分含量为13%±1%,含水量得测定根据GB 3523。 4碾磨品质得测定 4、1 出糙率得测定 4.1.1 常样法 4.1.1、1 仪器设备 实验室用谷物脱壳机 4.1.1、2 测定方法 a、根据待测样品谷粒得厚度,调节脱壳机滚轮(或辊子)得间距(一般在0、50~ 1.00mm之间),使样品经二次处理后,基本上脱壳完全。 b、机器空转数圈,以清除机内残留得稻谷与米粒。
c、称取130.0g稻谷,倒入进样漏斗中,打开电源开关,调节进样闸口,使样品均匀进入机内脱壳。 d、经二次脱壳后,检出样品中残留得谷粒并称其糙米与谷粒得重量,精确到0.1g。 4.1.1、3 结果得表述 出糙率按公式(1)计算:?出糙率(%)={(糙米重(g)/〔试样谷重(g)-未脱壳谷重(g)〕}×100 (1) 重复测定一次,求出二次出糙率得平均值、前后二次测定结果得相对相差不应大于1%、4.1.2 小样法?按GB 5495方法测定、 ?4、2 精米率得测定 4.2.1 仪器设备 JMJ-100型精米机或其她同类型号得实验室精米机、?4、2、2 测定方法?4、2、2、1 称取100g糙米,精确到0.1g,放入精米机得碾米室内、 4、2、2、2 调节碾米室盖得压力至3kg左右,再调节定时器得碾米时间,使碾米精度达国家标准一等米得水平、 4、2、2、3 碾磨后得米样经手工除去糠块,再用1.5mm直径得筛子除去胚片与糠屑、?4、2、2、4 待米样冷却至室温后,称精米重,精确到0.1g、 4、2、3结果得表述 精米率按公式(2)计算:?精米率(%)=〔精米重(g)/糙米重(g)〕×出糙率…………………… (2)?重复测定一次,求出精米率平均值、二次测定结果得相对相差应小于1、0 %、 4、3 整精米率得测定 4、3、1 仪器设备 整米分离机或具不同圆孔直径得筛子一套、 4、3、2 测定方法?4、3、2、1 精米样品得制备 精米样品制备得方法基本上同4、2、2,但掌握碾米得精度为糙米去糠率得10%±0、5%、4、3、2、2 整精米样品得分离?借助于整米分离机或筛子,自以上精米样品中人工分离出整精米(整精米系指肉眼观察无破损得完整精米粒),称重,精确至0.1g、 4、3、3结果得表述 整精米率按公式(3)计算: 整精米率(%)=〔整精米重(g)/糙米重(g)〕×出糙率 (3) 重复测定一次,求出整精米率平均值、两次测定结果相对相差应不超过2、0%、 5 外观品质得测定 5、1 长宽比得测定 5、1、1 仪器设备?谷物轮廓仪,照相放大机或微粒子计、?5、1、2 测定方法?从整精米样品中随机取出整精米10粒,在谷物轮廓仪上读出米粒得长度与宽度,以毫米为单位,读数精确至0.1mm、精米得长度系指整精米两端间得最大距离;宽度系指米粒最宽处得距离、 5、1、3 结果得表述?求出长度与宽度得平均值,按公式(4)计算其长宽比:
储 罐 液 位 检 测 系 统 专业: **** 班级: ***** 学号: ***** 姓名: ***** 摘要 超声波液位测量是一种非接触式的测量方式,它是利用超声波在同种介质中传播速 度相对恒定以及碰到障碍物能反射的原理研制而成的。与其它方法相比(如电磁的或光 学的方法),它不受光线、被测对象颜色的影响,对于被测物处于黑暗、有灰尘、烟雾、 电磁干扰、有毒等恶劣的环境下有一定的适应能力。因此,研究超声波在高精度测距系 统中的应用具有重要的现实意义。试设计储油罐(圆柱体型)液位、温度的实时监测系 统。
对现采用的油罐测量技术作对比,选用合适的测量技术,保证原油储罐的安全,降低劳动强度,取得良好的经济效益。 关键词:储油罐;液位测量;仪表;现状
储油罐液位检测系统设计 一、设计要求 我国石油资源丰富,采油炼油企业众多,储油罐是储存油品的重要设备,储油罐液位的精确计量对生产厂库存管理及经济运行影响很大。但国内许多反应罐、大型储油罐的液位计量仍采用人工检尺和分析化验的方法,其他参数的测定也没有实行实时动态测量,这样易引发安全事故,无法为生产操作和管理决策提供准确的依据。采用计算机自动监测技术,实时监测储油罐液位、温度等参数,可以方便了解生产状况,及时监视、控制容器液位及温度等,保障安全平稳生产。试设计储油罐(圆柱体型)液位的实时监测系统。 二、方案设计 目前国内外工业生产中普遍采用间接的液位测量方法,如浮子式、液压式、电容法、超声波法、磁致伸缩式、光纤等。 1、方案一 在光通信研究中发现,光纤受外界环境因素的影响,如压力、温度、电场、磁场等环境条件变化时,将引起光纤传输的光波量,如光强、相位、频率、偏振态等改变。如果能测量出光波变化的信息,就可以知道导致这些光波量变化的压力、温度、电场、磁场等物理量的大小,于是就出现了光纤传感器技术。光纤传感器的信号载体是在光纤中传输的光,而光纤本身是一种介质材料,这就赋予了光纤传感器具有一些常规传感器无可比拟的优点,如灵敏度高、响应速度快、动态范围大、防电磁干扰、超高压绝缘、无源性、防燃防爆、适用于远距离遥测、多路系统无地回路“串音”千扰、体积小、机械强度大、可灵活柔性挠曲、材料资源丰富、成本低等。
控制类系统设计 ——液位自动控制系统 摘要 随着电子技术、计算机技术和信息技术的发展,工业生产中传统的检测和控制技术发生了根本性的变化。液位作为化工等许多工业生产中的一个重要参数,其测量和控制效果直接影响到产品的质量,因此液位控制成为过程控制领域中的一个重要的研究方向。 液位控制是工业中常见的过程控制,它对生产的影响不容忽视。该系统利用了常见的芯片,设计并实现了液位控制系统的智能性及显示功能。电路组成简单,调试方便,性价比高,抗干扰性好等优点,能较好的实现水位监测与控制的功能。能够广泛的应用于工业场所。 液位控制有很多方法,如,非接触传感。只需要将传感器紧贴在非金属容器的外壁,就可以侦测到容器里面液位高度变化,从而及时准确地发出报警信号,有效防止液体外溢或防止机器干烧。由于不需要与液体接触且安装简便,避免了水垢的腐蚀,可取代传统的浮球传感和金属探针传感,延长寿命。而本设计是基于纯电路的设计,低成本且抗干扰性好。在本设计中较好的实现了水位监测与控制的功能。 液位控制系统是以液位为被控参数的系统,液位控制一般是指对某控制对象的液位进行控制调节,以达到所要求的液位进行调节,以达到所要求的控制精度。
1 概述 液位控制系统是以液位为被控参数的系统,是现代工业生产中的一类常见的、重要的控制过程。而传统的液位控制多采用单回路控制,并采用传统的指针式仪表来显示液位值,使液位控制的精度和显示的直观性受到限制,而随着生产线的更新及生产过程控制要求的提高,要求液位系统有高的控制性能。基于此,本系统就设计了一种电路简单,调试方便且性价比高的系统,来完成液位的自动调控。本系统主要由四部分组成:显示模块、振荡模块、传感器模块和声光报警模块,系统简单易行。 系统框图如下: 2 硬结构与功能 2.1 该设计的总体结构 该设计是一块集多种电子芯片于一体的多功能实验板,实现了液位系统的控制及显示。主要功能器件包括:电源部分的7808,定时部分的555定时器,数字分段的LM3914等。 电路原理图如下图所示:
电子测量仪器的各种分类方法和测量方式 1 按测量手段分类 1.1 直接测量:在测量过程中,能够直接将被测量与同类标准量进行比较,或能够直接用事先刻度好的测量仪器对被测量进行测量,直接获得数值的测量称为直接测量。 1. 2 间接测量:当被测 量由于某种原因不能直接测量时可以通过直接测量与被测量有一定函数关系的物理量,然后按函数关系计算被测量的数值,这种间接获得测量结果的方式称为间接测量。 1.3 组合测量:当某项测量结果需要用多个未知参数表 达时,可通过改变测量条件进行多次测量,根据函数关系列出方程组求解,从而得到未知量的测量,称为组合测量。 2 按测量方式分类 2.1 直读法:用直接指出被测量大小的指示仪表进行测量,能够直接从仪表刻度盘商或从显示器上读取被测量数值的测量方法,称为直读法。 2.2 比较法:将被测量与标准量在比较仪器中直接比较,从而获得被测量数值的方法,称为比较法。 3 按测量性质分类 3.1 时域测量:时域测量也叫作瞬时测量,主要是测量被测量随时间的变化规律。如用示波器观察脉冲信号的上升沿、下降沿、平顶降落等脉冲参数以及动态电路的暂态过程。真空表| 硬度计| 探伤仪| 电子称| 热像仪 3.2 频域测量:频域测量也称为稳态测量,主要目的是获取待测量与频率之间的关系。如用频谱分析仪分析信号的频谱,测量放大器的幅频特性、相频特性等。 3.3 数据域测量:数据域测量 也称逻辑量测量,主要是对数字信号或电路的逻辑状态进行测量,如用逻辑分析仪等设备测量计数器的状态。 3.4 随机测量:随机测量又叫做统计 测量,主要是对各类噪声信号进行动态测量和统计分析。这是一项新的测量技术,尤其在通信领域有着广泛应用。tips:感谢大家的阅读,本文由我司收集整编。仅供参阅!
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920523390.9 (22)申请日 2019.04.17 (73)专利权人 西安航天计量测试研究所 地址 710100 陕西省西安市15号信箱7分箱 (72)发明人 马车 常莹 赵米峰 张永攀 杨建 (74)专利代理机构 西安智邦专利商标代理有限 公司 61211 代理人 汪海艳 (51)Int.Cl. G01B 11/06(2006.01) (ESM)同样的发明创造已同日申请发明专利 (54)实用新型名称 一种高精度激光测量系统 (57)摘要 本实用新型属于精密测量技术领域,公开了 一种高精度激光测量系统,可应用于包括液体火 箭发动机微小零部件在内的其他工件的厚度测 量。包括底座、紧固螺钉、下限位板、Z向滑块、立 柱、上限位盖、承重块、平移台、定位块、吸附平台 以及激光位移传感器。底座上安装有立柱和承重 块;立柱上分别是上限位盖、下限位板和Z向滑 块;Z向滑块和下限位板分别通过紧固螺钉进行 夹紧固定,而上限位盖通过自身的螺纹与立柱旋 紧;激光位移传感器通过Z向滑块支撑;平移台、 吸附平台和定位块通过螺钉与承重块相连接。本 专利装置具备高精度(测量不确定度U≤5μm)测 量工件厚度的能力。权利要求书1页 说明书4页 附图3页CN 209783529 U 2019.12.13 C N 209783529 U
权 利 要 求 书1/1页CN 209783529 U 1.一种高精度激光测量系统,其特征在于:包括激光位移传感器(1)和定位台(2); 所述定位台(2)包括平移台(21)及固定在平移台(21)上表面的吸附平台(22); 所述平移台(21)能够沿X、Y向平移及在XY平面内旋转; 所述吸附平台(22)为中空腔体,腔体上开有进气口(221)及抽气口(222),所述进气口(221)位于吸附平台(22)上表面的中间部位;所述吸附平台(22)的上表面用于放置待测工件; 所述激光位移传感器(1)用于测量待测工件上表面及吸附平台(22)上表面距激光位移传感器(1)的距离。 2.根据权利要求1所述的高精度激光测量系统,其特征在于:所述定位台(2)还包括用于限制吸附平台(22)位移的定位块(23),所述定位块(23)上设有固定待测工件的通孔。 3.根据权利要求2所述的高精度激光测量系统,其特征在于:所述定位块(23)与平移台(21)可拆卸连接,定位块(23)底部开有与吸附平台(22)匹配的凹槽,吸附平台(22)位于所述凹槽内,定位块(23)侧壁开有与吸附平台(22)抽气口相通的开孔(231)。 4.根据权利要求2所述的高精度激光测量系统,其特征在于:所述定位台(2)还包括位于平移台(21)底部的承重块(24)。 5.根据权利要求4所述的高精度激光测量系统,其特征在于:还包括底座(4)及立柱(3),所述立柱(3)与承重块(24)固定在底座(4)上; 所述立柱(3)上安装有Z向滑块(25),所述Z向滑块(25)用于固定激光位移传感器(1)。 6.根据权利要求5所述的高精度激光测量系统,其特征在于:所述立柱(3)上还安装有下限位板(26)与上限位盖(27); 所述下限位板(26)位于Z向滑块(25)的下方,通过紧固螺钉(10)固定在立柱(3)上;所述上限位盖(27)位于立柱(3)的顶端。 7.根据权利要求5所述的高精度激光测量系统,其特征在于:还包括隔震平台,底座(4)设置在隔震平台上。 8.根据权利要求1所述的高精度激光测量系统,其特征在于:所述平移台(21)包括底板(211)、X向平移板(212)、Y向平移板(213)及旋转台(214); 所述底板(211)上设有X向凹槽,所述X向平移板(212)底部设有凸起,所述凸起能够在X 向凹槽内滑动; 所述X向平移板(212)上表面设有Y向凹槽,所述Y向平移板(213)底部设有凸起,所述凸起能够在Y向凹槽内滑动; 所述旋转台(214)包括伺服电机(215)、小齿轮及大齿轮,伺服电机(215)的输出轴与小齿轮连接,所述小齿轮与大齿轮啮合; 所述吸附平台(22)固定在大齿轮的上表面。 2
木门常规标准和测量方法
木门常规尺寸和测量安装标准 木门,门框,门套线的常规标准; 门扇净尺寸:卧室:2000*800*40MM;厨房:2000*750*40MM:卫生间:20 00*700*40MM 门框外边尺寸:卧室:2040*868**40MM;厨房:2040*818*40MM:卫生间:2040*768*40MM 门洞水平垂直标准尺寸:卧室:2055*888MM;厨房:2055*838MM:卫生间:2055*788MM 门套线:普通木线尺寸为宽70*厚12MM,欧式木线为宽100*厚20MM 一、门洞的测量 1、门洞宽度测量:水平测量门洞左右的距离,选取三个以上的测量点进行测量,其中最小值(减门框调整余量20MM)为门框外边尺寸。 2、门洞墙体厚度的测量:水平测量墙体厚度,选取三个以上的测量点进行测量,其中最大值为墙体厚度,如果墙面需要做其他装修,则门洞墙体厚度需要增加装修材料厚度(比如卫生间或厨房墙面需要贴瓷砖或做大理石)。 3、门洞高度测量:找到现场定准的水平线垂直测量门洞上下距离,选取三个以上的测量点进行测量,其中最小值(减门框调整余量15MM)为门框外边尺寸(在测量过程中要注意地面处理情况,预留出地面装修材料的厚度以备所须)。 4、特殊墙的处理:转角墙丁字墙门洞安装前应通知客户先在无门垛的一边做“假墙”根据线条宽度确定做假墙宽度尺寸,最低宽度尺寸不得少于50mm。
二、安装前(产品)运输存放 1、套装门属油漆类产品,出厂前都做了抛光处理;在装卸车及搬运过程中容易造成门扇、门框的碰伤;所以对在搬运过程中要认真负责,轻拿轻放。 2、货物运抵现场时,应按照产品安装顺序进行拆包,并清点所以产品及配件的实物和数量是否与合同相符。 3、货到现场门框按门框尺寸整齐摆放,门扇要平放或横放,平放要求底层要平整,每扇堆放间隙处用木方或木板隔开,横放必须要有支架,门扇绝对不允许靠墙竖放而造成木门变形。 4、门框到现场必须按编号一次性分到位。 5、门扇,门框应在室内用垫板垫平叠放;门框与门扇分开叠放,禁止斜放和在门扇及其他材料上堆放重物注意防潮.严禁与酸碱物一起存放;检查清理现场,看门洞或门框的预留尺寸是否符和设计要求。 三、安装技术要求 木门安装是木门的最后一道关,安装质量将直接影响木门的整体效果,如果由于安装的不规范造成门扇、门框的损伤、划伤、碰伤等,而要现场返修,将大大增加维修成本,安装要求如下: 1、门框的安装 1)一般情况下都是先安装门框,再安装门扇最后安装套线,门框的安装要保持垂直度误差在1mm以内,门框安装时宽度居中安装。 2)现场有底框的安装方法采用镀锌直角铁码连接,每半边安装3个铁码(特殊高度的门框安装5-7),若现场的底框安装不符合安装条件,就需要做如下处理: a必须加固原底框;
超声波液位测量系统设计 摘要:设计一套液位测量系统,要求测量范围0~2000mm,系统测量精度0.1%。利用单片机加以控制,挡板补偿方法减小误差,提高传播时间的测量准确度来提高精度。 关键词:液位检测 1.液位检测方法简介 1.1按其工作原理可分为下列几种类型: 直读式:它根据流体的连通性原理来测量液位。 浮力式:它根据浮子高度随液位高低而改变或液体对浸沉在液体中的浮筒(或称沉筒)的浮力随液位高度变化而变化的原理来测量液位。前者称为恒浮力式,后者称为变浮力式。 差压式:它根据液柱或物料堆积高度变化对某点上产生的静(差)压力的变化的原理测量物位。 电气式:它根据把物位变化转换成各种电量变化的原理来测量物位。核辐射式:它根据同位素射线的核辐射透过物料时,其强度随物质层的厚度变化而变化的原理来测量液位。 声学式:它根据物位变化引起声阻抗和反射距离变化来测量物位 1.2液位计 1.2.1直接测量 直接测量是一种最为简单、直观的测量方法,它是利用连通器的原理,将容器中的液体引入带有标尺的观察管中,通过标尺读出液位
高度。 玻璃管液位计。 1.2.2人工检尺 人工检尺液位测量是对各种储罐内的液体进行体积和质量测定的种基本方法。具有操作简单、计量准确、无须辅助设备的特点,仍是目前各油田原油集输过程中的一种主要计量方法。检尺测量时,先对罐内液位高度进行测定,再根据罐的横截面积或大罐容积表,计算罐内液体体积和质量。检尺测量的工具是钢卷尺,其下端带有铜质重锤。为方便量油操作,在罐顶设有量油口。量油口下装有量油管,管子底端钻有孔眼与液体连通。设置量油管的目的是为了减小罐内液面波动对量油的影响。 1.2.3磁翻转液位计 磁翻转液位计结构牢固、工作可靠、显示醒目。由于被测液体被 完全密封,使用磁耦合传动,因而 可以测量高温、高压及不透明的粘
XXXXXXXX 学院 题 目 基于PLC 的液位控制系统设计 英文并列题目 Liquid level control system based on PLC 院 系 控制技术学院 班 级 XXXXXX 学生姓名 王政钦 学 号 XXXXX 所在团队 导老师(1) XXX 职 称 指导老师(2) 职 称 答辩委员会主任 XXXX 主答辩人 二 零 XX 年 X 月
目录 摘要 (1) 第一章绪论 (2) 1.1本课题所设置的背景 (2) 1.2本课题研究的内容及主要方法 (2) 1.3预期的结果及意义 (2) 第二章系统方案设计 (3) 2.1常见的锅炉类型 (3) 2.2锅炉的液位控制技术 (4) 2.3本课题采用的方案 (5) 2.3.1 锅炉的液位控制系统 (5) 2.3.2 PID的控制方式与简介 (5) 第三章系统硬件选型 (7) 3.1PLC的发展现状 (7) 3.2PLC的基本结构与工作方式 (7) 3.2.2 PLC的工作方式 (8) 3.3液位传感器的定义、组成与选择 (9) 3.3.1 传感器的定义 (9) 3.3.2 传感器的作用与组成 (9) 3.3.3 液位传感器的类型 (10) 3.4液位开关的选择 (10) 3.5控制阀的流量测量 (11) 3.5.1 测量的概述与检测方法 (11) 3.6报警装置的设计 (12) 3.6.1 报警系统装置的设计与功能 (12) 第四章硬件设计 (13) 4.1PLC的选择 (13) 4.2I/O分配表与输入、输出点的说明 (14) 4.2.1 输入、输出点的说明 (14) 4.3PLC控制液位的I/O接线图 (15) 第五章系统主程序的设计 (16) 5.1系统的主程序的设计 (16)
武汉理工大学 毕业设计(论文) 基于力控的液位测量控制系统的设计 学院(系): 专业班级: 学生姓名: 指导教师:
摘要 油罐在石油化工工业生产及贮油方面具有不可忽视的作用,既然这样,油罐的液位测量就显得非常重要。本论文在对比国内外相关课题后,提出了一套完整的油罐液位系统测量方案。该系统采用可编程控制器(PLC)的电源模块,CPU模块及模拟、数字的输入、输出模块作为硬件,并将其相互连接达到液位和温度的测量及显示作用,同时利用Pro-32程序作为该系统的软件对其进行温度信号的采集和液位信号的测量。最后,再应用力控软件对该系统进行仿真。 该系统包括三套液位测量装置,在本次设计中应用小型以太网联接在一起,达到分散设备,集中控制的目的。 关键词:液位测量 PLC 以太网
Abstract Oilcan has the function that have to can't neglect in petroleum chemical engineering industry production and the oil of storing, since like this, the measures liquid of the oilcan and then seem to be very important.My thesis put forward a set of complete oilcans liquid system diagraph project after contrasting domestic and international and related lesson.The system supply power model,CPU model and analog,digital input,output model as its hardware,combining its mutually connection to attain the liquid a diagraph with manifestation function of temperature, combining exploitation procedure Pro-32 conduct and actions that system of the programmable controller( PLC) in adoption in the system proceed the temperature signal collects with the diagraph of the liquid a signal.Finally, then the applied dint really control the software to proceed to imitate to the system. The system includes three sets of equipment for measuring liquid device, in this design They are connected together by applied small scaled ether net, and get dispersion equipments, concentrating control. Key phrase: The liquid measures The PLC Ether net
测量误差的分类以及解决方法 1、系统误差 能够保持恒定不变或按照一定规律变化的测量误差,称为系统误差。系统误差主要是由于测量设备、测量方法的不完善和测量条件的不稳定而引起的。由于系统误差表示了测量结果偏离其真实值的程度,即反映了测量结果的准确度,所以在误差理论中,经常用准确度来表示系统误差的大小。系统误差越小,测量结果的准确度就越高。 2、偶然误差 偶然误差又称随机误差,是一种大小和符号都不确定的误差,即在同一条件下对同一被测量重复测量时,各次测量结果服从某种统计分布;这种误差的处理依据概率统计方法。产生偶然误差的原因很多,如温度、磁场、电源频率等的偶然变化等都可能引起这种误差;另一方面观测者本身感官分辨能力的限制,也是偶然误差的一个来源。偶然误差反映了测量的精密度,偶然误差越小,精密度就越高,反之则精密度越低。 系统误差和偶然误差是两类性质完全不同的误差。系统误差反映在一定条件下误差出现的必然性;而偶然则反映在一定条件下误差出现的可能性。 3、疏失误差 疏失误差是测量过程中操作、读数、记录和计算等方面的错误所引起的误差。显然,凡是含有疏失误差的测量结果都是应该摈弃的。 解决方法: 仪表测量误差是不可能绝对消除的,但要尽可能减小误差对测量结果的影响,使其减小到允许的范围内。 消除测量误差,应根据误差的来源和性质,采取相应的措施和方法。必须指出,一个测量结果中既存在系统误差,又存在偶然误差,要截然区分两者是不容易的。所以应根据测量的要
求和两者对测量结果的影响程度,选择消除方法。一般情况下,在对精密度要求不高的工程测量中,主要考虑对系统误差的消除;而在科研、计量等对测量准确度和精密度要求较高的测量中,必须同时考虑消除上述两种误差。 1、系统误差的消除方法 (1)对测量仪表进行校正在准确度要求较高的测量结果中,引入校正值进行修正。 (2)消除产生误差的根源即正确选择测量方法和测量仪器,尽量使测量仪表在规定的使用条件下工作,消除各种外界因素造成的影响。 采用特殊的测量方法如正负误差补偿法、替代法等。例如,用电流表测量电流时,考虑到外磁场对读数的影响,可以把电流表转动180度,进行两次测量。在两次测量中,必然出现一次读数偏大,而另一次读数偏小,取两次读数的平均值作为测量结果,其正负误差抵消,可以有效地消除外磁场对测量的影响。 2、偶然误差的消除方法 消除偶然误差可采用在同一条件下,对被测量进行足够多次的重复测量,取其平均值作为测量结果的方法。根据统计学原理可知,在足够多次的重复测量中,正误差和负误差出现的可能性几乎相同,因此偶然误差的平均值几乎为零。所以,在测量仪器仪表选定以后,测量次数是保证测量精密度的前提。 . 容:
国产高精度位置和姿态测量系统 LDPOS的发展与应用 周落根邓晓光洪勇( 摘要:本文详细介绍了高精度位置和姿态测量系统的发展,我国具有完全自主知识产权的移动测量和实景三维技术和产品的研究、应用和服务情况,以及地面无控航测系统,并对其未来的发展进行展望。 关键词:高精度位置和姿态测量系统LDPOS 地面无控航测系统 一引言 高精度位置和姿态测量系统(Position and Orientation System,POS)集全球导航卫星系统、惯性测量单元、导航处理计算机技术于一体,可以实时获取运动物体的高精度空间位置和三维姿态信息,广泛应用于飞机、轮船和陆地载体的导航定位。POS通过全球导航卫星系统(Global Navigation Satellite System ,GNSS)接收定位数据,利用高精度光学陀螺捷联惯性测量单元(Inertial Measurement Unit,IMU)提供设备瞬间的速度、加速度和方向信息,然后通过数据处理与融合软件对所接收的定位定姿信息进行数据处理,获得载体设备的高精度位置及姿态信息,同时给载荷传感器提供高精度同步信息,直接解算观测成果的高精度外方位元素,输出具有直接地理参考的影像数据。 POS解决了GNSS动态可靠性差,会出现信号遮挡、丢失,同时数据输出的频率低等问题。POS系统将GNSS长期、低动态定位精度高的特性与惯性导航系统(INS)的短期、高动态定位精度高的性能有机地结合起来,不但提高了系统的精度,加强了系统的抗干扰能力,同时解决了GNSS动态应用采样频率低的问题。 POS 系统可为载体或航空传感器提供高精度、高频率(200HZ)的实时位置与姿态(X,Y,Z,φ,ω,κ)数据,应用于各种不同类型的传感器:如航空胶片或数字相机、线阵扫 周落根,立得空间信息技术股份有限公司副总经理;邓晓光、洪勇,立得空间信息技术股份有限公司。
液位测量系统设计 专业:自动化 班级:自控1202 学号:2012014059 姓名:徐越
目录 摘要: (3) 关键词: (3) 一、液位检测方法简介 (3) 简述各种液位计的特点 (5) 1 超声波液位计|物位计 (5) 2 静压液位计 (6) 3 雷达液位计 (6) 4 磁致伸缩液位计 (6) 5 差压式液位计|物位计 (6) 6 磁翻板或磁翻柱液位计 (7) 7 伺服式液位计 (7) 8 电容式液位计 (7) 9 射频导纳液位计 (7) 10 浮筒液位计 (8) 11 钢带液位计 (8) 12 静磁栅液位计 (8) 几种常见液位计性能比较 (9) 二、液位测量系统设计 (10) 2.1液位测量原理 (10) 2.2补偿设计 (11) 2.3测量系统结构 (12) 2.4误差分析 (13) 三、总结 (14) 四、参考文献 (14)
实验设计 摘要:设计一套液位测量系统,要求测量范围0~2000mm,系统测量精度0.1%。利用单片机加以控制,挡板补偿方法减小误差,提高传播时间的测量准确度来提高精度。 关键词:液位检测、超声波 一、液位检测方法简介 常用于测量液位的液位计有连通器式、吹泡式、差压式、电容式等,测量物位的有超声波物位计和放射性物位计等。其测量原理和特点如下: 1、连通器式就是应用最普通的玻璃液位计。 它的特点是结构简单、价廉、直观,适于现场使用,但易破损,内表面沾污,造成读数困难,不便于远传和调节。 2、浮力式液位计包括恒浮力式和变浮力式两类。 (1)恒浮力式液位计 恒浮力式液位计是依靠浮标或浮子浮在液体中随液面变化而升降,它的特点是结构简单、价格较低,适于各种贮罐的测量; (2)变浮力式液位计 变浮力式亦称沉筒式液位计,当液面不同时,沉筒浸泡于液体
目录 1 《控制系统集成实训》任务书 (2) 2 总体设计方案 (4) 2.1 系统组成 (4) 2.2 水箱液位控制系统构成 (4) 2.3 水箱液位控制系统工作原理 (5) 2.4 仪表选型 (6) 2.4.1 GK-01电源控制屏 (6) 2.4.2 GK-02传感器输出与显示 (7) 2.4.3 GK-03单片机控制 (7) 2.4.4 GK-07交流变频调速 (8) 2.4.4 GK-08 PLC可编程控制 (8) 2.5 PLC设计流程图 (9) 3 外部接线图 (10) 4 I/0分配 (10) 5 梯形图 (11) 6 组态王界面 (15) 6.1 主界面 (16) 6.2 数据词典 (16) 6.3 曲线监控 (17) 6.4 水流动画程序 (18) 7 调试和运行结果 (19) 7.1 比例控制 (19) 7.2 比例积分调节 (19) 心得体会 (21) 参考文献 (22)
1.《控制系统集成实训》任务书 题目:基于PLC和组态王的液位PID控制系统 一、实训任务 本课题要求设计液位PID控制系统,它的任务是使水箱液位等于给定值所要求的高度,并通过PID控制减小或消除来自系统内部或外部扰动的影响。 1.实训模块: 1、THKGK-1过程控制实验装置GK-0 2、GK-07、GK-08。 2、计算机及STEP7运行环境(安装好演示程序)、MPI电缆线,组态王软件。 2.控制原理和控制要求: 控制原理如图所示,测量值信号由S7-200PLC的AI通道进入,经程序比较测量值与设定值的偏差,然后通过对偏差的P或PI或PID调节得到控制信号(即输出值),并通过S7-200PLC 的AO通道输出。用此控制信号控制变频器的频率,以控制交流电机的转速,从而达到控制水位的目的。S7-200PLC和上位机进行通讯,并利用上位机组态王软件实现给定值和PID参数的设置、手动/自动无扰动切换、实时过程曲线的绘制等功能。 二、实训目的 通过本次实训使学生掌握:1)实际控制方案的设计;2)编程软件的使用方法和梯形图语言的运用;2)程序的设计及实现方法;3)程序的调试和运行操作技术。从而提高学生应用PLC 进行控制系统设计和调试能力,组态王设计监控界面的能力。 三、实训要求 1、系统方案设计 2、硬件选型和接线 3、PLC控制程序设计。
基于智能仪表的串联双容水箱液位控制系统 (青海大学化工学院 2009年10月22日魏国强邮编:810016 关键字:智能仪表液位控制串联双容水箱) 中文摘要:本文提出了一种利用智能仪表AI808对串联双容水箱液位 进行串级控制,以MCGS组态软件实现上位机对现场进行实时组态、 监控的方法。 1.本题目设计的目的与意义 1.1本题目设计的目的 串联双容水箱在工业过程控制中应用非常广泛。在串联双容水 箱水位的控制中,进水首先进入第一个水箱,然后通过第二个水箱流出,与一个水箱相比,由于增加了一个水箱,使得被控量的响应在时 间上更落后一步,即存在容积延迟,从而导致该过程的难以控制。本 系统就是为解决这种缺陷而设计。 1.2本题目设计的意义 串级控制是改善调节过程动态性能的有效方法,由于其超前的控 制作用,可以大大克服系统的容积延迟。采用两步整定法,通过MCGS 组态软件对整定过程及曲线进行实时监控,直至达到主、副回路的最 佳整定参数。 2.液位控制系统在我国的发展现状和未来 2.1液位控制系统在我国的发展现状 随着生产水平和科学技术的不断发展,现代控制系统的规模日 趋大型化、复杂化,对设备和被控系统安全性、可靠性和有效性的要 求也越来越高。为了确保工业生产过程高效、安全的进行,保证并提
高产品的质量,对生产过程进行在线监测,及时准确地把握生产运行状况,已成为目前过程控制领域的一个研究热点。近几十年来,液位控制系统已被广泛使用,在其研究和发展上也已趋于完备。在轻工行业中,液位控制的应用非常普遍,从简单的浮球液位开关、非接触式的超声波液位检测一直到高精度的同位素液位检测系统到处都可以见到他们的身影。而控制的概念更是应用在许多生活周遭的事物上。而且液位控制系统已是一般工业界所不可缺少的元件。凡举蓄水池,污水处理场等都需要液位元的控制.如果能通过一定的系统来自动维持液位的高度那么操作人员便可轻易地在操作时获知真个设备的储水状况,如此不但工作人员工作的危险性,同时更提升了工作的效率及简便性.基于智能仪表的串联双容水箱液位控制系统正是具有这种功能。 2.2液位控制系统的未来 在构建液位控制系统的过程中,我们得知实际操作的变异性存在其中,因此如何分析、调整及改良便是我们日后所要着重的要点。而在完成传统的PID操作控制系统后,未来我们更将利用Genetic Algorithms 找出最好的参数并建构在液位控制系统。且比较加入智能型控制后的系统与传统 PID是否会有性能上的差异。近年来液位控制系统取得了很大进步,出现了许多新型的液位控制仪,如超声波液位仪、雷达液位仪、光电液位开关等,这些控制器利用无线电波的折射及反射原理。光线在两种介质的分接口将产生反射或折射现象。当被测液体处于高位时则被测液体与光电开关形成一种分界面,当被测液体处于低位时,则空气与光电开关形成另一种分界面。这两种分
一、基本概念 1、测试用例(案例)主要记录:测试步骤、方法、数据、预期结果的文档,由测试人员在执行测试之前编写的 2、编写用例的方法 (1)等价类划分 (2)边界值 (3)因果图 (4)判定表 (5)正交排列法 (6)场景法 (7)测试大纲法 (8)状态转换图 3、写用例参考什么? (1)文档:需求、开发文档、用户手册 (2)参考已经开发出来的软件 (3)讨论 二、等价类划分 1、应用场合 只要有数据输入的地方,就可以使用等价类划分 把无限多的数据根据需求,划分成多个区域(有效、无效),
从每个区域中选取一个代表性数据进行测试即可 说明: 穷举测试是最全面的测试,但是是不能采用的方法,时间成本太高,编写用例的方法主要解决的问题是如何使用最少的数据,达到最大的覆盖 2、核心概念 (1)有效等价类 对程序规格有效的、合理的输入数据的集合 程序接收到有效等价类,可以正确计算、执行 (2)无效等价类 对程序规格无效的、不合理的输入数据的集合 程序接收到无效等价类,应该给出错误提示,或者根本不允许输入 3、如何使用? 首先明确测试对象—第一个数文本框 说明:在测试第一个数的时候,保证第二个数正确 (1)根据需求,划分等价类 ①有效等价类 -99—99之间的整数 ②无效等价类
A、非整数 B、<-99的整数 C、>99的整数 (2)细化等价类 往往依据的不是字面的需求,而是基于对数据存储方式的深入理解以及数据格式的理解 ①正负数补码计算不一样,有必要把正数、负数单独测试-99—0整数 0—99整数 ②非整数可以进一步细分 小数 字母 汉字 符号 (3)建立等价类表(熟练后直接做该步)
1 高精度测量方案及原理 铂电阻传感器是利用金属铂(Pt)的电阻值随温度变化而变化的物理特性而制成的温度传感器。以铂电阻作为测温元件进行温度测量的关键是要能准确地测量出铂电阻传感器的电阻值。按照IEC751国际标准,现在常用的Pt1000(Ro=1 000 Ω)是以温度系数TCR=0.003 851为标准统一设计的铂电阻。其温度电阻特性是: 本温度测量系统采用三线制恒流源驱动法驱动铂电阻传感器。三线制恒流源驱动法是指用硬件电路消除铂电阻传感器的固定电阻(零度电阻),直接测量传感器的电阻变化量。图l为三线制恒流源驱动法高精度测量方案,参考电阻与传感器串联连接,用恒流源驱动,电路各元件将产生相应的电压,传感器因温度变化部分电阻的电压可以由后面的放大电路和A/D转换器直接测量,并采用2次电压测量—交换驱动电流方向,在每个电流方向上各测量一次。其特点是直接测量传感器的电阻变化量,A/D转换器利用效率高,电路输出电压同电阻变化量成线性关系。传感器采用三线制接法能有效地消除导线电阻和自热效应的影响。利用单片机系统控制两次测量电压可以避免接线势垒电压及放大器、A/D转换器的失调与漂移产生的系统误差,还可以校准铂电阻传感器精度。恒流源与A/D转换器共用参考基准,这样根据A/D转换器的计量比率变换原理,可以消除参考基准不稳定产生的误差,不过对恒流源要求较高,电路结构较为复杂。为了进一步克服噪声和随机误差对测量精度和稳定度的影响,最后在上位机中采用MLS数值算法实现噪声抵消,大大提高了温度测量精度和稳定度。 2 系统电路设计 2.1 三线制恒流源驱动电路 恒流源驱动电路负责驱动温度传感器Pt1000,将其感知的随温度变化的电阻信号转