仿生机器人器件清单
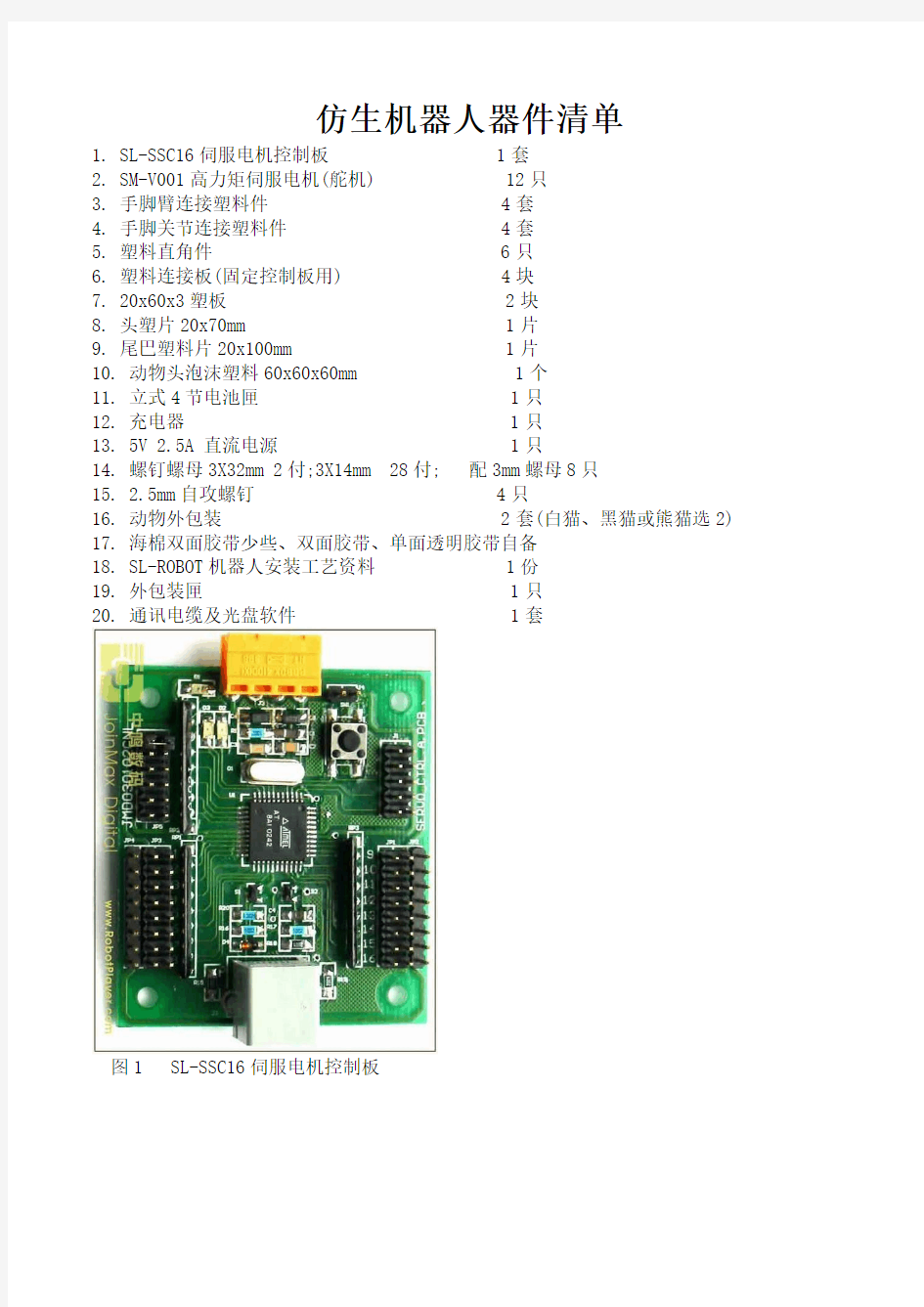
1. SL-SSC16伺服电机控制板 1套
2. SM-V001高力矩伺服电机(舵机) 12只
3. 手脚臂连接塑料件 4套
4. 手脚关节连接塑料件 4套
5. 塑料直角件 6只
6. 塑料连接板(固定控制板用) 4块
7. 20x60x3塑板 2块
8. 头塑片20x70mm 1片
9. 尾巴塑料片20x100mm 1片
10. 动物头泡沫塑料60x60x60mm 1个
11. 立式4节电池匣 1只
12. 充电器 1只
13. 5V 2.5A 直流电源 1只
14. 螺钉螺母3X32mm 2付;3X14mm 28付; 配3mm螺母8只
15. 2.5mm自攻螺钉 4只
16. 动物外包装 2套(白猫、黑猫或熊猫选2)
17. 海棉双面胶带少些、双面胶带、单面透明胶带自备
18. SL-ROBOT机器人安装工艺资料 1份
19. 外包装匣 1只
20. 通讯电缆及光盘软件 1套
图1 SL-SSC16伺服电机控制板
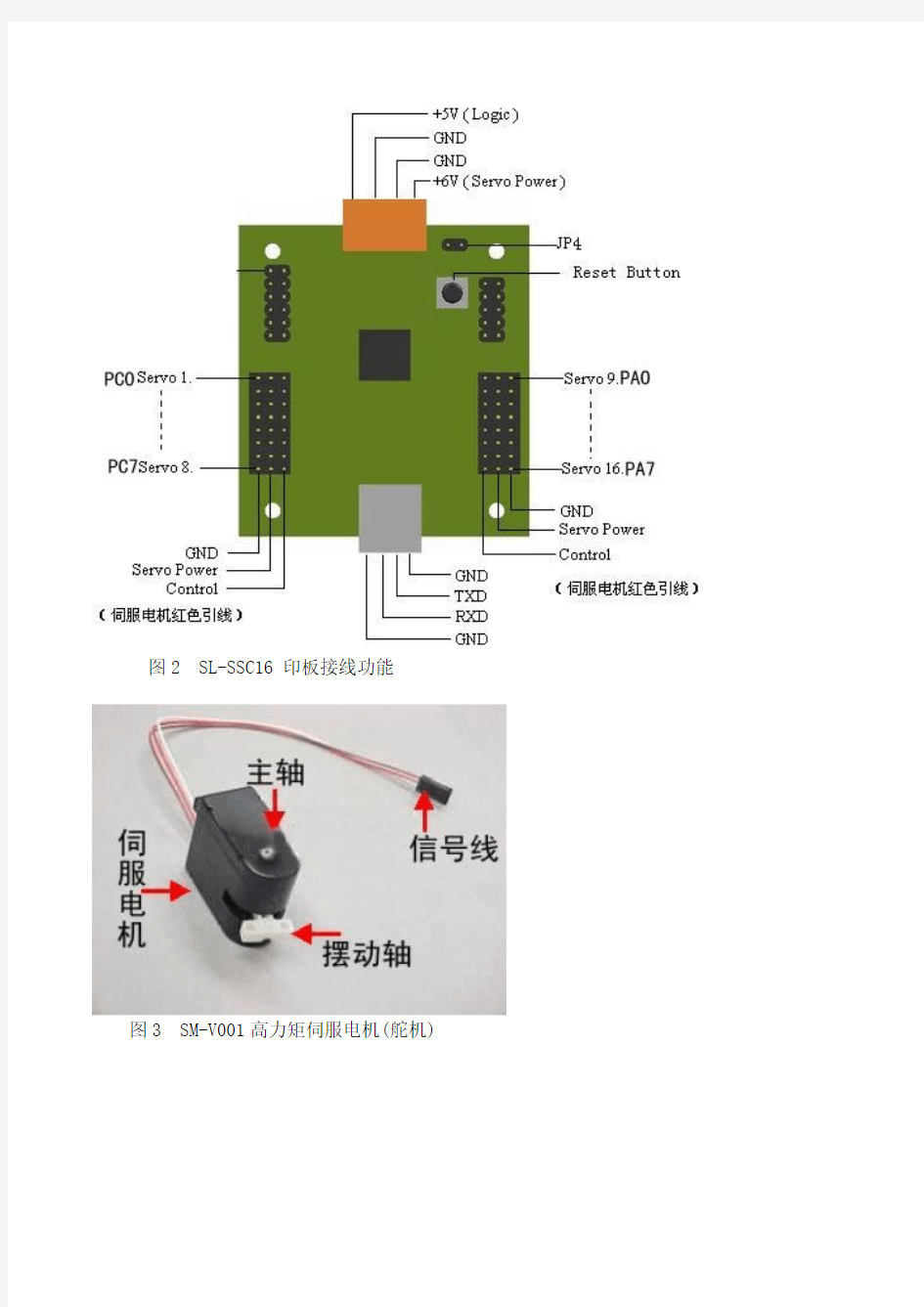
图2 SL-SSC16 印板接线功能
图3 SM-V001高力矩伺服电机(舵机)
图4 电池匣
图5 SL-ROBOT-3简易机器人塑料件
图6 各种胶带
SL-ROBOT-3简易通用仿生机器人的创新开发
在青少年中学习开发应用机器人是时代的需要,应适教育的需要,提高学生素质的好方法。机器人可分为轮式机器人、仿生机器人、虚拟机器人及网络机器人,我们这里讲通用仿生机器人。
SL-ROBOT-3简易通用仿生机器人,是双龙电子开发的新产品,该机械结构、外包装造型适用于所有具有4足动物的仿生功能,也适用于设计具有4肢的洋娃娃。SL-ROBOT-3可使用图形软件或流程度软件,只要你会操作电脑,你就能开发、设计、组装、调试SL-ROBOT-3简易通用
仿生机器人。
(一)机器人概述
仿生机器人是目前较高级的机器人。尤其仿人形机器人要解决平衡问题,应该说难度更大,这就是一种新的挑战,也就是创新所在。
仿生机器人,即用机器来模仿一切有生命的生物的某些功能、运动、智能等,为人类所利用。仿生机器人中我们另外分出仿人形机器人,即有手有脚机器人。人是智能最高的生物,所以研究仿人形机器人是当今最高科技的综合。
仿生机器人又可分二足机器人、四足机器人、六足机器人、多足机器人、蛇形机器人、幼虫机器人、鱼形机器人等等。二足机器人有鸟类、鸡、鸭、天鹅、企鹅、鸵鸟、丹顶鹤等等。四足机器人品种也很多,有鼠、牛、虎、兔、龙、马、羊、猴、狗、猪、猫、象、狮、青蛙、龟、国宝熊猫等等。六足机器人七星瓢虫、蟋蟀等。多足机器人蟹、虾、蜈蚣、蜘蛛等等。
仿生机器人也可综合、拼装抽象出新的生物,运动会的吉祥物,计算机动画人物,童话电影创造的新生物,利用逆向思维、克隆技术创造新生物,设计成双头新动物如:鼠猫和、狗鼠好、马虎头、牛马对等等。
仿人形机器人行走又可分不需平衡控制的与需考虑平衡控制的两类。不需考虑平衡控制的机器人如:大脚机器人,交义脚机器人,其机器人运动重心始终在大脚上; 需考虑平衡控制的仿人形机器人,就要考虑行走时重心的随时调正,使机器人重心始终在机器人脚上。面向青少年的机器人开发应用,因考虑到技术与经济状况,我们仅定位在初级阶段,使复杂问题简单化,来解决机器人行走的平衡问题。随着我国人民经济水准的提高及应用技术的普及,再研究智能更高的仿人形机器人。
机器人的开发应用普及与技术支持和经济条件有关。日本的娱乐机器人要人民币160多万,新加坡的踢足球机器人要3-5万,如果我国开发的仿人机器人控制在3-5千,才能在我国青少年中推广普及。
我国普通高中教材《简易机器人》将于2004年秋季试点,2007年全国推广,又值2008年我国举办世界奥林匹克运动会,其中科技奥运也是我国奥运会的重要组成部分。
单片机技术是计算机技术的一个分支,是简易机器人的核心组件。日常生活中的VCD机、DVD机、数字电视机、自动洗衣机、空调及其遥控器等设备都使用着各种各样的单片机,同时在工业控制、智能机器、智能武器、智能化仪表和仪器等领域,它也得到了广泛应用。
通过《简易机器人》的学习,学生应该知道单片机和机械传动的基本知识,能设计与制作由单片机和传动机械等组成的简易自动控制机器或简单的自动控制系统。
教学中要重视使用计算机技术提供的学习平台,突出简易机器人的实际应用,合理选择价格低廉、可多次编程的单片机型号和通俗易懂的单片机编程语言。注意应用实例的典型性,着重系统和技术试验等技术思想方法在设计过程中的具体运用,力争达到举一反三的效果。
我国各省市每年都有创新大赛和机器人大赛,世界上也有各种专业机器人赛事。我国每年暑假举办全国青少年科技创新大赛,设有专门展区展示青少年机器人创意设计的优秀作品。
全国青少年科技创新大赛(China Adolescents Science & Technology Invention Contest, 简称CASTIC)是一项具有20年历史的全国性青少年科技创新和科学研究项目的科技比赛,是目前国内面向在校中小学生规模最大、层次最高的具有示范性和导向性的全国青少年科技教育活动之一,其根本宗旨在于推动青少年科技活动的蓬勃开展,培养青少年的创新精神和实践能力,提高青少年的科技素质,鼓励优秀人才的涌现。
全国青少年科技创新大赛是由中国科协、教育部、科技部、国家环境保护总局、国家体育总局、自然科学基金委员会、共青团中央、全国妇联和承办省(区、市)政府主办。全国每年约有1500万青少年参加各级各类的青少年科技创新竞赛活动。
为培养青少年的实践能力和创新精神,把现代化的科学技术引入中小学青少年科技教育活
动,激发广大青少年学习、探索、掌握和运用电子信息技术的兴趣,提高青少年的科学素质,大赛组委会开设专门展区展示青少年机器人创意设计的优秀作品。优秀机器人创意设计作品由大赛组委会根据各地开展青少年机器人活动的情况,选择开展较好的地区选送优秀作品展示。展示的机器人创意设计要有创新性和新颖性,要有良好的功能和完整的演示表演过程;应能够完成不同的动作,并有对设计模型的创意、功能和结构等简短介绍的文字说明。
(二)机器人开发的四大平台
我们围绕《简易机器人》教材与“全国青少年科技创新大赛”的要求,根据我国实际情况,机器人硬件控制平台决定采用AVR单片机及双龙电子的SL-DIY系列积木化单片机开发实验器。
1. 机器人开发的硬件控制平台
双龙的SL-DIY系列积木化单片机开发实验器是AVR系列单片机的低价开发、学习工具(不需再购编程器、仿真器、擦抹器、芯片适配器等)。SL-DIY系列积木化单片机开发实验器是学习单片机知识的启蒙老师, 是单片机开发应用的良师益友, 是启迪创新思维的最好导师! 大量事实证明,SL-DIY系列开发实验器可以百变组合, 为你开辟了科技创新的大门, 为国家培养了大批有用人才, 也为人类创造了大量物质和精神财富。
SL-DIY系列积木化单片机开发实验器硬件,如果在小学学习时购了,那么到中学、大学学习就不必再购单片机硬件了。如果在中学学习时购了,那么到大学学习就不必再购单片机硬件了。如果在大学学习时购了,那么到到工作岗位搞科研开发就不必再购单片机硬件了。这样的一次购入,终身享用,为你节省多少硬件发经费!
SL-DIY系列开发实验器的硬件及软件的百变组合, 只要你会操作电脑, 你就可以搞单片机的开发应用, 就可搞机器人的创新制作。这样, 就可从小学、初中、高中、大学及具有相适文化知识的人们(学生家长)都可搞单片机的学习、开发、创新活动。我们的目标, 从小培养创新人才, 使中国现代教育能培养出荣获诺贝尔奖的人材!
2. 机器人开发的软件控制平台
双龙SL-DIY系列积木化单片机开发实验器硬件所配的软件平台,对小学生采用图形编辑软件或流程图软件, 只要用鼠标点击,或用鼠标拉动图形中的滑块, 就可以对单片机进行编程开发、仿真调试、下载编程、应用实验, 从而培养小学生对单片机、机器人的爱好和兴趣。对高小生、初中生、高中生、电子爱好者,SL-DIY系列开发实验器同样硬件所配软件,可以采用单片机的汇编语言, 就可以进行编程开发、仿真调试、下载编程、科技创新设计、实验应用。对高中的优秀学生、大学生及单片机爱好者, SL-DIY系列开发实验器同样硬件所配的软件,也可使用C高级语言,BASCOM高级语言等等, 用高级语言提高了编程效率, 为青少年进入社会工作打下了坚强基础。这样,从小学到中学, 从大学到工作岗位,任何人都可搞单片机的开发应用,也可以根据你的实际知识水平需要选用何种语言, 而学习单片机的硬件平台是统一的, 软件知识水平是逐渐提高的。学习开发应用单片机,一线(ISP下载线)打天下, 为人们学习单片机的开发应用节省了大量人力、物力、财力和时间。
SL-DIY系列积木化单片机功能模块板可以是空芯片,相当于提供一张白纸,可以让你写最好的文章,画最好最美的图画。当然该功能板还提供AVR单片机各种编程语言的程序例子,有汇编级及高级语言源程序,供使用者学习参考、修改补充,使该功能板符合自己项目工程的需要。另外双龙电子也提供含有监控程序的芯片(含相应操作系统软件,例:图形编辑软件、流程度编辑软件、工控组态软件等),使你可锦上添花,提高你的项目开发水平,加快项目的开发进程,让你早出成果,快出成果。
3. 机器人开发的机械结构平台
仿生机器人的机械结构平台,即机器人的躯体及活动关节,我们采用伺服电机(含相差90度的双轴输出伺服电机)控制,专用塑料连接件配置,这样的机械结构,使复杂问题简单化,在某
些应用中伺服电机既是躯体部件又是活动关节,只需要用螺钉及塑料连接件拼装而成,然后加上外包装成你所设计的仿生机器人。
4. 机器人的外形设计平台
SL-ROBOT系列通用仿生机器人集开放式单片机学习功能、开放式机器人通用结构平台、机器人外形设计创新于一身。
仿生机器人外形设计:市场上的机器人只有一个固定不变的外形。SL-ROBOT系列机器人外形采用各种动物迫真可爱的造型(例熊猫、狗、猫、老虎、或十二生肖动物,各种吉祥物、卡通人物、小孩等)包括头尾,装配包装在机器人身上。仿生机器人通用结构平台不变,只要换上不同的外包装,就构成不同的动物造型。仿生机器人既有各种动物的特征,又显露机器人特有的机械结构,可由人们任意控制指挥仿生机器人动作,也可作娱乐机器人表演。
图1 各种仿生机器人的外包装头
请注意:有了机器人开发的四大平台,以后的关键是决定你的创新开发思想。
我们可利用中国成语故事,加上逆向思维、克隆技术创造新生物,新机器人,如,对牛弹琴、画蛇添足、四不象、牛头马面、龟兔赛跑、虎头蛇尾等;也可设计成双头新动物如:鼠猫和、狗鼠好、马虎头、牛马对等等。
(四) SL-DIY系列积木式化单片机开发实验器的基本模块板
SL-DIY系列积木化单片机功能模块板又可分单片机、机器人开发实验学习板及机器人创新专用板。机器人开发实验学习板有:SL-DIY02-1/2/3/4/5/6; 机器人创新专用板有SL-DIY02-9,SL-SSC16。
图2 SL-DIY积木式系列板的应用
双龙的SL-DIY系列积木式化单片机开发实验器,它可开发AVR及AT89S系列单片机,便于学习者动手组装单片机硬件,并可发挥自己编写软件的想象力、创造力,使软件、硬件结合,更加灵活地开发出新的实用产品。双龙的SL-DIY系列积木化单片机开发实验器,已申请国家实用新型专利,专利号:02288747.4
(1) SL-DIY02-1为单片机下载开发实验器主机板,配有ISP下载电缆, 该板就是一个独立的高性能单片机开发实验系统。配有A VR单片机AT90S8515(ATmega8515)或AT89S单片机AT89S51/52/8252(选购件), 可做单片机的开发应用创新实验等,可以提供散件或整机。SL-DIY02-1与SL-DIY02-2组合,配组态监控及组态软件,可学习单片机I/O口的工作原理,学习工控组态原理及自动控制。SL-DIY02-1与SL-DIY02-2及SL-JB小键盘组合,配上组态监控,可设计互动虚拟机器人等。SL-DIY02-1与SL-DIY02-2及SL-JB小键盘组合,也可用汇编语言或高级语言编写单片机开发应用实验程序工作。例如,单片机与PC机通讯,音乐程序下载,用SL-JB小键盘当电子琴键盘使用,具有按键记忆及乐曲重奏功能。SL-DIY02-1与SL-DIY02-4伺服电机驱动板组合,可用汇编语言或高级语言设计有手有脚的创新机器人。SL-DIY02-1与SL-DIY02-6积木式机器人板组合,可组成SL积木式智能轮式机器人,可参加各种比赛。
(2) SL-DIY02-2功能板为单片机组态开发通讯实验板(含AVR组态监控、组态光盘、通讯电缆),还可配SL-JB 16键的小键盘使用。SL-DIY02-2功能板必须插在SL-DIY02-1/3板上工作。可学习单片机I/O口的工作原理,学习工控组态原理,搞数据采集、自动控制, 用SL-JB 小键盘设计互动虚拟机器人、网络机器人等。SL-DIY02-2也可用汇编语言或高级语言编写单片机开发应用实验程序,例如单片机与PC机通讯,音乐程序下载,用SL-JB小键盘当电子琴键盘使用,具有按键记忆及乐曲重奏功能。
(3) SL-DIY02-2A伺服电机(舵机) 驱动控制板, 可设计出有手有脚的机器人。SL-DIY02-2A插在DIY02-2板上开发调试工作, 调试好后也可直接插在SL-DIY02-1/3板上工作,SL-DIY02-2A配图形软件及监控。
(4) SL-JB16 16只键的小键盘板, 可配在SL-DIY02-2单片机组态开发实验板或SL-2010/3010双龙智能机器人等,可作电子琴键盘或作组态互动控制使用。
(5) SL-DIY02-3 为AVR AT90S8535(ATmega8535/ATmega16)单片机下载开发实验器主板,配有ISP下载电缆,可做A/D数据采集、闭环控制, 本板就是一个独立的高性能单片机开发实验系统,可做单片机的各种开发应用创新实验等。SL-DIY02-3与SL-DIY02-2组合, 配组态监控及组态软件,可学习单片机I/O口的工作原理,学习工控原理及A/D数据采集自动闭环控制。SL-DIY02-3与SL-DIY02-2及SL-JB小键盘组合,配上组态监控,可设计互动虚拟机器人、网络机器人等。SL-DIY02-3与SL-DIY02-2及SL-JB小键盘组合,也可用汇编语言或高级语言编写单片机开发应用实验程序工作。例如,单片机与PC机通讯,音乐程序下载,用SL-JB小键盘当电子琴键盘使用,具有按键记忆及乐曲重奏功能。SL-DIY02-3与SL-DIY02-4伺服电机驱动板组合,可配图形监控及图形软件,组成有手有脚的智能机器人。SL-DIY02-3与SL-DIY02-6积木式机器人板组合,可组成SL积木式智能轮式机器人,可参加各种比赛。
(6) SL-DIY02-4伺服电机(舵机)驱动板, 插在SL-DIY02-3板上工作, 带通讯接口,可驱动16只伺服电机,附监控及图形软件;或该板插在SL-DIY02-1/3板, 用汇编语言或高级语言编程工作, 可驱动24只伺服电机,可做成有手有脚有创意的各种机器人。
(7) SL-DIY02-5功能板为万通实验板,根据自己项目需要焊接功能器件,其板的大小同主机板, 可插在各种SL-DIY系列功能板上或SL-3010双龙智能机器人板上扩展之用。
(8) SL-DIY02-6积木式机器人板,具有多个红外传感器、光敏传感器、接触传感器、稳压滤波电路、直流减速电机及驱动电路、电池匣、遥控接口(遥控收发器为选购件),模块板接口,电机固定架、驱动轮、导向轮等。SL-DIY02-1(或3)开发实验板,插在SL-DIY02-6板上,组成SL积木式轮式智能机器人,就具有相当于SL-3010双龙智能机器人功能。具有避悬崖、避障、寻迹、程控、遥控、追光、音乐下载、机器人走迷宫、AVR单片机开发应用实验功能等等。SL-DIY02-6与遥控收发器组合,可组成具有遥控功能的智能机器人,可设计成自学习机器人。
(9)SL-DIY02-9机器人专用板(有手有脚机器人、虚拟机器人、网络机器人),最多可驱动32只伺服电机,有声控输入,有8路10位A/D模拟量输入、ISP在线下载、RS232通讯等接口。
(10) SL-SSC16伺服电机控制板,最多控制16只伺服电机,使用串口图形软件,只要你会操作电脑,你就会开发设计调试伺服电机控制的机器人。
(11)遥控收发器: 可配SL-2010/3010双龙智能机器人及SL-DIY02-6积木式机器人板使用。可设计出具有遥控功能的机器人或自学习机器人。
(五)SL-ROBOT-3简易四足仿生机器人
SL-ROBOT-3简易四足仿生机器人(简称机器人)是单片机学习、机器人制作及一切创新开发应用的教具。
SL-ROBOT-3机器人,
可适用于所有四足动
物,可根据动物特征
改变躯体长短,四足
长短,头尾形状,再用
动物外形包装起来即
可。SL-ROBOT-3机器
人控制板装在机器人
背上,电池装在胸腔
内。机器人伺服电机
间用塑料连接件连接,
前身及后身两伺服电
机分别用双面胶及塑
料板连接,。前身与后
身构成的胸腔用塑料
板直接连接。动物足
为塑料直角件与伺服
电机用螺钉直接连
接。
图5 SL-ROBOT-3机械结构图
机器人一头的—只伺服电机摆动轴上装生物的头(与某—只足的伺服电机共用), 另一头的—只伺服电机摆动轴上装动物的尾(与某—只足的伺服电机共用),这样,做到动物可摇头摆尾。SL-ROBOT-3机器人装上玩具动物、玩具娃娃等的头尾,身上再装上相应动物皮毛,创造出可爱迫真具有创意的新机器人。
图6 小熊猫 图7 蓝猫
图8 大熊猫
图9 创意双头狗与猫
图10 白猫、黑猫、机器猫
图11 创意---不管白猫黑猫,捉到老鼠就是好猫
图12 创意---不管白猫黑猫机器猫,捉到老鼠就是好猫
(六) SL-ROBOT-3简易四足仿生机器人安装与调试
1. 主要器材:
伺服电机12只(4条腿共12只,头尾与足共用),伺服电机控制板SL-SSC16 (图形监控、RS232通信线), SL-ROBOT-3塑料连接件及螺钉等1套, 5V 2.5A 直流稳源电源一只;4节立式电池匣一只,充电器一只。配一种动物头、尾等外包装件一套。
图13 SL-ROBOT塑料件
(1)SL-ROBOT-3伺服电机控制板的塑料转接板及伺服电机夹板的加工方法:按伺服电
机控制板实际尺寸加工。例:2个红色(2号孔)3mm孔为机器人对应控制板安装孔,
加工2块,也叫上夹板。1个蓝色(1号孔)孔为伺服电机上下夹板固定孔,下夹板不
必打控制板的固定孔,也加工2块。夹板作SL-ROBOT-3仿生机器人腔体伺服电机,
用3x35mm螺钉上下夹紧固定用。
图14 转接板及夹板的加工安装
(2) 机器人的胸腔由前后伺服电机用塑料连接板连接而成。板两头分别用3mm螺钉固定在伺服电机的固定孔上,板中间的两孔用3mm螺钉固定电池组。
图15 伺服电机用塑料连接板连接
(3)肩胛与关节塑料作连接件
仿生机器人四足或人手脚的4肢直
接由伺服电机与肩胛塑料件及关节塑料作
直接连接而成。足底由直角塑料件与伺服
电机用螺钉直接连接而成。如是动物,则装
上对应动物的足外包装,如是洋娃娃,则装
上洋娃娃的手与脚。
图16 肩胛塑料件
图17 脚的安装
(4) 立式电池匣
立式电池匣可装高性能4节5号2500mA充电电池为4.8V,也可装普通高性能电池4节6V,SL-ROBOT-3均可工作,调试时可用外接5V稳压直流电源。
图18 立式电池匣
2. SL-ROBOT-3安装流程
(1) 先用塑料连接板连接成机器人胸腔两侧的2只伺服电机,然后4只电机平放形成胸
腔。拼装时,2只电机间用3mm硬泡沫板剪电机侧面形状,用双面胶固定。
图19 机器人胸腔安装
(2) 机器人胸腔安装好后,再把伺服电机控制板及夹板试配,确定机器人前后上夹板固定
伺服电机控制板尺寸,并打孔固定控制板。再在夹板电机间粘上双面海棉胶带固定,宁紧上下夹板螺钉。
图20 夹板及控制板安装之一
图20 夹板及控制板安装之一
图21 夹板及控制板安装之二
(3)安装仿生机器人四足,安装仿生机器人头、尾的角件。
(4)按图要求插上伺服电机控制线。
(5)接上电源及通讯电缆,打开图形软件,SL-ROBOT-3.RB文件调试。
制作机器人常用的单片机性能特点及使用经验 单片机, 机器人, 性能, 特点, 经验 转载请注明作者:刘天龙(机电狂人),来源:https://www.doczj.com/doc/3d5154969.html, 作者:刘天龙1986年生爱好广泛,喜爱机器人技术期待开发各种各样的机器人产品邮箱:spurtltl@https://www.doczj.com/doc/3d5154969.html, 2010 2 5 注有LTL Robot字样的案例均为作者制作 原创文章,转载请注明作者 摘要: 很多接触机器人或单片机不久的朋友面对种类繁多的单片机常会困惑,到底它们之间有何不同?制作机器人到底用哪种单片机控制比较好?当我们选择了一种单片机后,有何捷径能迅速掌握并应用这种单片机?本文尝试用一种通俗易懂的方法解读上述问题,并设计了一种有深度的单片机控制机器人的实例,希望能起到抛砖引玉的作用。我与大家分享我使用单片机的一些经验,希望能让初学者少些迷茫,让已经入门的朋友思维开阔。 写本文时我仅有3年单片机实践经验,比较了解51系列和AVR系列单片机,因此着重讨论了AVR单片机,我经验有限,有错误在所难免,希望朋友们批评指正! 一单片机和CPU、个人电脑的区别和联系 这部分内容比较初级,但很多朋友刚接触单片机时或许对下面的问题不是很清楚。 1 什么是CPU? CPU中文名称为“中央处理器”,典型代表为英特尔8086处理器,现在的奔腾X处理器都是8086的直系后代。处理器,顾名思义,其功能是处理数据,对于中央处理器,就是在数据处理中处于核心地位的处理器,听起来似乎很复杂,但实际上核心就是一个ALU“算术逻辑单元”。这个单元由一些数字门电路组成,仅能完成括加、减、乘、除四则运算,与、或、非、异或等逻辑操作,以及移位、比较和传送等操作。CPU内部包含ALU,除此之外CPU还有时钟电路,CPU运行的基本原理是:时钟电路产生计数脉冲,这个脉冲控制着一个累加器,即每产生一个时钟脉冲,累加器加1,这个累加值以16进制数字的形式通过地址总线唯一选通程序储存器中一个储存单元(在CPU外部),这个单元将内部储存的程序命令代码通过数据总线送到ALU中,ALU根据代码不同执行不同操作,比如把某寄存器数值和某数值相加等,然后将计算结果输出到IO口或者各个总线上。 总之,CPU的工作就是把程序中的命令代码翻译成不同任务,然后执行,输出执行结果。CPU在一切数字计算机中都发挥了核心作用,即计算机都有CPU。 2 什么是个人电脑? 由于CPU只有计算功能,其计算的结果需要通过显示器、音箱输出,而其工作的依据,即程序命令则依靠硬盘储存,其执行任务时动态存取的数据要保存在内存中,而人可以通过键盘控制程序命令的执行过程,把所有这些CPU的外设组合在一起就叫做“个人电脑”。
基于单片机控制的双足行走机器人设计 摘要:21世纪机器人发展日新月异,从传统的履带式机器人到如今的双足行走机器人,机器人的应用范围越来越广。本系统以单片机(STC89c52)为系统的中央控制器,以单片机(STC12c5410ad)为舵机控制模块。将中央控制器与舵机控制器,舵机,各类传感设备及受控部件等有机结合,构成整个双足行走机器人,达到行走、做动作的目的。单片机中央控制器与舵机控制器以串口通信方式实现。系统的硬件设计中,对主要硬件舵机控制器和STC89C52单片机及其外围电路进行了详细的讲述。硬件包括舵机控制器,STC12C5410AD 单片机,按键,各种传感器和数据采集与处理单元。软件包括单片机初始化、主程序、信号采集中断程序、通过串口通讯的接收和发送程序。论文的最后部分以双足行走机器人为基础,结合传感器,外围控制设备组成控制系统,并给出了此系统应用领域的一些探讨和研究。 关键词:单片机;舵机控制; STC12C5410AD
Bipedal robot design based on MCU Abstract:In the 21st century robot development changes with each passing day, from the traditional crawler robot to now bipedal robot, the robot's application scope is more and more widely.This system by single chip microcomputer (STC89c52) as the central controller in the system, STC12c5410ad MCU as the steering gear control module. The central controller and the servo controller, Steering gear, all kinds of sensing and control components such as organic combination, make up the whole bipedal robot, the purpose of to walk, do the action.Single chip microcomputer central controller and the servo controller to realize serial communication way.System hardware design, the main hardware servo controller and STC89C52 single-chip microcomputer and peripheral circuit in detail. Hardware including servo controller, STC12C5410AD micro controller, buttons, all kinds of sensor and data acquisition and processing unit. Software includes MCU initialization, the main program, and interrupts program signal collection, through a serial port communication to send and receive procedures. The last part of the paper on the basis of bipedal robot, combined with the sensor, the peripheral control device of control system, this system is also given some discussions and research in the field of application. Keywords:MCU; Servo Control; STC12C5410AD
—-可编辑修改,可打印—— 别找了你想要的都有! 精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务—— 全力满足教学需求,真实规划教学环节
最新全面教学资源,打造完美教学模式 深圳大学期末考试试卷 开/闭卷开卷A/B卷N/A 课程编号1303270001 1303270002 课程名称EDA技术与实践(2)学分2.0 命题人(签字) 审题人(签字) 2015 年10 月20 日 设计考试题目:完成一个集成电路或集成系统设计项目 基本要求:2-3位同学一组,完成一个完整的集成电路设计项目或是一个集成系统设计项目。 规格说明: 1.题目自定。 1)集成电路设计项目 i.若为IC设计项目需要完成IC设计的版图。 ii.若采用FPGA实现数字集成电路设计,需要进行下板测试。 2)集成系统设计项目,需使用FPGA开发板或嵌入式开发板,完成一个完整的集成 系统作品。 3)作品需要课堂现场演示,最后提交报告,每个小组单独一份报告,但需阐述各个 成员的工作。 2.评分标准:
2015年第二学期,建议作品内容: 完成一个行走机器人,基本要求 o2-8只脚 o能行走 o可以用单片机,嵌入式,FPGA方案 一、设计目的: 通过设计一个能够走动的机器人来增加对动手能力,和对硬件电路设计的能力,增强软件流程设计的能力和对设计流程实现电路功能的能力,在各个方面提升自己对电子设计的能力。 二、设计仪器和工具: 本设计是设计一个能走动的机器人,使用到的仪器和工具分别有:sg90舵机12个、四脚机器人支架一副、单片机最小系统一个、电容电阻若干、波动开关一个、超声遥控模块一对、杜邦线若干、充电宝一个。 三、设计原理: 本次设计的机器人是通过51单片机控制器来控制整个电路的。其中,舵机的控制是通过产生一个周期为20毫秒的高电平带宽在0.5到2.5ms之间的pwm信号来控制。12路Pwm信号由单片机的定时器来产生。51单片机产生12路pwm信号的原理是:以20毫秒为周期,把这20毫秒分割
基于单片机及传感器的机器人设计与实现 摘要:本设计基于单片机及多种传感器,完成了一个自主式移动机器人的制作。单片机作为系统检测和控制的核心,实现对机器人小车的智能控制。反射式红外光电传感器检测引导线,使机器人沿轨道自主行走;使用霍尔集成片,通过计车轮转过的圈数完成机器人行走路程测量;接近开关可探测到轨道下埋藏的金属片,发出声光信息进行指示,并能实时显示金属片距起点的位置。 关键词:单片机; 机器人; 传感器 1前言 机器人技术是融合了机械、电子、传感器、计算机、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术。一些发达国家已把机器人制作比赛作为创新教育的战略性手段。如日本每年都要举行诸如“NHK杯大学生机器人大赛”、“全日本机器人相扑大会”、“机器人足球赛”等各种类型的机器人制作比赛,参加者多为学生,旨在通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识.[1] 开展机器人的制作活动,是培养大学生的创新精神和实践能力的最佳实践活动之一,特别是机电专业学生开展综合知识训练的最佳平台。本文针对具有引导线环境下的路径跟踪这一热点问题,基于单片机控制及传感器原理,通过硬件电路制作和软件编程,制作了一个机器人,实现了机器人的路径跟踪和自动纠偏的功能,并能探测金属,实时显示距离。 2机器人要完成的功能 选取一块光滑地板或木板,上面铺设白纸,白纸上画任意黑色线条(线条不要交叉),作为机器人行走的轨迹,引导机器人自主行走。纸下沿黑线轨迹随机埋藏几片薄铁片,铁片厚度为0.5~1.0mm。机器人沿轨迹行走一周,探测出埋藏在纸下铁片,发出声光报警,并显示铁片距离起点的位置。 3 硬件设计方案 机器人总体构成
单片机机器人设计 1 引言 轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动机构中,轮式移动机构最为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移动方向。因此.有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于5l型单片机的自动巡线轮式机器人控制系统。 摘要:设计了一种自动巡线轮式行走机器人控制系统,采用AT89S52型单片机作为主控CPU,外加一个复杂可鳊程逻辑器件(CPID)协助CPU处理数据,扩展了程序参数存储器,能够进行检测引导线和直流电机、舵机的PWM控制。关键词:控制系统;复杂可编程逻辑器件;
存储器;光电检测;脉冲宽度调制 2 控制系统总体设计 机器人控制系统由主控制电路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图1所示。 3 主控制模块设计3.1 CPLD设计 在机器人控制系统中.需要控制多个电动机和行程开关.还要进行光电检测.如果所有的任务都由 AT89S52型单片机来完成.CPU的负担就会过重。影响系统的处理速度。因此扩展1个CPLD.型号为EPM7128。它属于.MAX7000系列器件。包括2个通用1/0口.2个专用I/O口,专用I/O口可作为每个宏单元和输入输出引脚的高速控制信号(时钟、清除和输出使能等),电动机的。PWM信号也由其产生。
EPM7128的引脚排列如图2所示。MlP—M4P引脚的输出为PWM脉宽调制信号,M1FB—M4FB引脚为电机的方向控制信号,P00一P07接单片机的PO口,100一1015为扩展的2个通用I/O口,SIl—S17引脚为行程开关输入信号,LI11一LI17引脚为光电探头输入信号。CPLD的编程用VHDL语言,产生1路PWM信号的部分程序源代码如下:
用单片机实现语音控制机器人 制作人:潘磊pb02023035 卢恒pb02006088 题目:用凌阳单片机实现语音识别功能并传递给PIC单片机信号,由PIC单片机控制机器人实现动作 关键字:PIC单片机,凌阳单片机,语音控制 单片机在现今生活中占有越来越重要的地位,用语音控制单片机实现控制更具有 广泛的应用价值。用语音控制舞蹈机器人做一些动作是我们这次实现的功能,虽然这 在语音控制方面仍处于起步阶段,但他体现了语音控制的原理和基本实现,也为更高 级的运用打下了基础。 原理: 1.语音识别原理 语音识别电路基本结构如上图所示:语音识别分为特定发音人识别(Speaker Dependent)和非特定发音人识别(Speaker Independent)两种方式。 特定发音人识别是指语音样板由单个人训练,对训练人的语音命令识别准确率较高,而其他人的语音命令识别准确率较低或不识别。非特定发音人识别:是指语音样板由不同年龄、不同性别、不同口音的人进行训练,可以识别一群人的命令。语音样板的提取非常重要。我们将标准模式的存储空间称之为“词库”,而把标准模式称之为“词条”或“样板”。所谓建立词库,就是将待识别的命令进行频谱分析,提取特征参数作为识别的标准模式。 识别过程首先要滤除输入语音信号的噪音和进行预加重处理,提升高频分量,然后用线性预测系数等方法进行频谱分析,找出语音的特征参数作为未知模式,接着与预先存储的标准模式进行比较,当输入的未知模式与标准模式的特征相一致时,便被机器识别,产生识别结果输出。如果输入的语音与标准模式的特征完全一致固然好,但是语音含有不确定因素,完全一致的条件往往不存在,事实上没有人能以绝对相同的语调把一个词说两遍,因此,预先制定好计算输入语音的特征模式与各特征模式的类似程度,或距离度的算法规则固化在ROM
基于单片机设计的简易智能机器人引言 随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。这种技术促使机器人技术也有了突飞猛进的发展,目前人们已经完全可以设计并制造出具有某些特殊功能的简易智能机器人。 1 设计思想与总体方案 1.1 简易智能机器人的设计思想 本机器人能在任意区域内沿引导线行走,自动绕障,在有光源引导的条件下能沿光源行走。同时,能检测埋在地下的金属片,发出声光指示信息,并能实时存储、显示检测到的断点数目以及各断点至起跑线间的距离,最后能停在指定地点,显示出整个运行过程的时间。 本设计以AT89C5l单片机作为检测和控制核心。采用红外光电传感器检测路面黑线及障
碍物,使用金属传感器检测路面下金属铁片,应用光电码盘测距,用光敏电阻检测、判断车库位置,利用PWM(脉宽调制)技术动态控制电动机的转动方向和转速。通过软件编程实现机器人行进、绕障、停止的精确控制以及检测数据的存储、显示。通过对电路的优化组合,可以最大限度地利用51单片机的全部资源。P0口用于数码管显示,P1口用于电动机的PWM驱动控制,P2,P3口用于传感器的数据采集与中断控制。这样做的优点是:充分利用了单片机的内部资源,降低了总体设计的成本。该方案总体方案见图1。 系统的硬件组成及设计原理
此系统的硬件部分由单片机单元、传感器单元、电源单元、声光报警单元、键盘输入单元、电机控制单元和显示单元组成,如图2所示。 2.1 单片机单元 本系统采用AT89C51单片机作为中央处理器。其主要任务是扫描键盘输入的信号启动机器人,在机器人行走过程中不断读取传感器采集到的数据,将得到的数据进行处理后,根据不同的情况产生占空比不同的PWM脉冲来控制电机,同时将相关数据送显示单元动态显示,产生声光报警信号。其中,P0用于数码管动态显示,P1.0一P1.5控制2个电机,P1.6、P1.7为独立式键盘接口,P2接传
军第一航空学院张宏,王德合 引言 随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。这种技术促使机器人技术也有了突飞猛进的发展,目前人们已经完全可以设计并制造出具有某些特殊功能的简易智能机器人。 1 设计思想与总体方案 1.1 简易智能机器人的设计思想 本机器人能在任意区域内沿引导线行走,自动绕障,在有光源引导的条件下能沿光源行走。同时,能检测埋在地下的金属片,发出声光指示信息,并能实时存储、显示检测到的断点数目以及各断点至起跑线间的距离,最后能停在指定地点,显示出整个运行过程的时间。 1.2 总体设计方案和框图 本设计以AT89C5l单片机作为检测和控制核心。采用红外光电传感器检测路面黑线及障碍物,使用金属传感器检测路面下金属铁片,应用光电码盘测距,用光敏电阻检测、判断车库位置,利用PWM(脉宽调制)技术动态控制电动机的转动方向和转速。通过软件编程实现机器人行进、绕障、停止的精确控制以及检测数据的存储、显示。通过对电路的优化组合,可以最大限度地利用51单片机的全部资源。
P0口用于数码管显示,P1口用于电动机的PWM驱动控制,P2,P3口用于传感器的数据采集与中断控制。这样做的优点是:充分利用了单片机的内部资源,降低了总体设计的成本。该方案总体方案见图1。 2 系统的硬件组成及设计原理 此系统的硬件部分由单片机单元、传感器单元、电源单元、声光报警单元、键盘输入单元、电机控制单元和显示单元组成,如图2所示。 2.1 单片机单元 本系统采用AT89C51单片机作为中央处理器。其主要任务是扫描键盘输入的信号启动机器人,在机器人行走过程中不断读取传感器采集到的数据,将得到的数据进行处理后,根据不同的情况产生占空比不同的PWM脉冲来控制电机,同时将相关数据送显示单元动态显示,产生声光报警信号。其中,P0用于数码管动态显示,P1.0一P1.5控制2个电机,P1.6、P1.7为独立式键盘接口,P2接传感器,P3.2接计里程的光电码盘,P3.7接声光报警单元,P3.4、P3.5、P3.6接用于显示断点数目的发光二极管。
基于单片机的智能机器人的课程设计 班级:自动化09-2班 姓名: 学号:
摘要 随着数字技术的快速发展,数字技术被广泛应用于智能控制的领域中。单片机以体积小、功能全、价格低廉、开发方便的优势得到了许多电子系统设计者的青睐。它适合于实时控制,可构成工业控制器、智能仪表、智能接口、智能武器装置以及通用测控单元等。 本文以STC89C52单片机为核心设计了智能机器人系统,本机器人实现了能在人一区域内沿引导线行走,自动绕鄣,在有光源引导的条件下能沿光源行走。同时,能检测埋在地下的金属片,发出声光知识信息,并能实时储存,显示检测到的断点数目以及各断点至起跑线间的距离,最后能停在指定地点,显示整个运行的时间。 关键词单片机传感器L298 A/D LCD12864
Abstract With the development of the digital technology, digital technology has been widely applied in the field of intelligent control. MCU with small volume, complete functions, low price, convenient development advantage by many electronic system designers favor. It is suitable for real-time control, can form industrial controllers, intelligent instruments, intelligent interface, intelligent weapon device and universal measurement and control unit. To STC89C52 microcontroller as the core design of intelligent robot system, this robot can walk in a region along the guide line, automatic winding Zhang, walking along the light conditions of a light guide. Able to detect buried in the underground metal sheets, audible and visual knowledge and information, and real-time storage, display the number of breakpoints detected and the distance between each breakpoint to the starting line, the final stop at the designated locations, to show the entire run time. Key words Singlechipmicrocomputer Sensor L298 A/D LCD12864 目录
仿生机器人器件清单 1. SL-SSC16伺服电机控制板 1套 2. SM-V001高力矩伺服电机(舵机) 12只 3. 手脚臂连接塑料件 4套 4. 手脚关节连接塑料件 4套 5. 塑料直角件 6只 6. 塑料连接板(固定控制板用) 4块 7. 20x60x3塑板 2块 8. 头塑片20x70mm 1片 9. 尾巴塑料片20x100mm 1片 10. 动物头泡沫塑料60x60x60mm 1个 11. 立式4节电池匣 1只 12. 充电器 1只 13. 5V 2.5A 直流电源 1只 14. 螺钉螺母3X32mm 2付;3X14mm 28付; 配3mm螺母8只 15. 2.5mm自攻螺钉 4只 16. 动物外包装 2套(白猫、黑猫或熊猫选2) 17. 海棉双面胶带少些、双面胶带、单面透明胶带自备 18. SL-ROBOT机器人安装工艺资料 1份 19. 外包装匣 1只 20. 通讯电缆及光盘软件 1套 图1 SL-SSC16伺服电机控制板
图2 SL-SSC16 印板接线功能 图3 SM-V001高力矩伺服电机(舵机)
图4 电池匣 图5 SL-ROBOT-3简易机器人塑料件
图6 各种胶带
SL-ROBOT-3简易通用仿生机器人的创新开发 在青少年中学习开发应用机器人是时代的需要,应适教育的需要,提高学生素质的好方法。机器人可分为轮式机器人、仿生机器人、虚拟机器人及网络机器人,我们这里讲通用仿生机器人。 SL-ROBOT-3简易通用仿生机器人,是双龙电子开发的新产品,该机械结构、外包装造型适用于所有具有4足动物的仿生功能,也适用于设计具有4肢的洋娃娃。SL-ROBOT-3可使用图形软件或流程度软件,只要你会操作电脑,你就能开发、设计、组装、调试SL-ROBOT-3简易通用
深圳大学期末考试试卷 开/闭卷开卷A/B卷N/A 课程编号1303270001 1303270002 课程名称EDA技术与实践(2)学分2.0 命题人(签字) 审题人(签字) 2015 年10 月20 日 设计考试题目:完成一个集成电路或集成系统设计项目 基本要求:2-3位同学一组,完成一个完整的集成电路设计项目或是一个集成系统设计项目。 规格说明: 1.题目自定。 1)集成电路设计项目 i.若为IC设计项目需要完成IC设计的版图。 ii.若采用FPGA实现数字集成电路设计,需要进行下板测试。 2)集成系统设计项目,需使用FPGA开发板或嵌入式开发板,完成一个完整的集成 系统作品。 3)作品需要课堂现场演示,最后提交报告,每个小组单独一份报告,但需阐述各个 成员的工作。 2.评分标准:
2015年第二学期,建议作品内容: ?完成一个行走机器人,基本要求 o2-8只脚 o能行走 o可以用单片机,嵌入式,FPGA方案 一、设计目的: 通过设计一个能够走动的机器人来增加对动手能力,和对硬件电路设计的能力,增强软件流程设计的能力和对设计流程实现电路功能的能力,在各个方面提升自己对电子设计的能力。 二、设计仪器和工具: 本设计是设计一个能走动的机器人,使用到的仪器和工具分别有:sg90舵机12个、四脚机器人支架一副、单片机最小系统一个、电容电阻若干、波动开关一个、超声遥控模块一对、杜邦线若干、充电宝一个。 三、设计原理: 本次设计的机器人是通过51单片机控制器来控制整个电路的。其中,舵机的控制是通过产生一个周期为20毫秒的高电平带宽在0.5到2.5ms之间的pwm信号来控制。12路Pwm信号由单片机的定时器来产生。51单片机产生12路pwm信号的原理是:以20毫秒为周期,把这20毫秒分割成8个2.5ms,因为,每个pwm信号的高电平时间最多为2.5ms,然后在前六个2.5ms中分别输出两个pwm信号的高电平,例如,在第一个2.5ms中输出第一个和第二个pwm信号的高电平时,首先开始时,把信号S1、S2都置1,然后比较两个高电平时间,先定时时间短的高电平时间,把高电平时间短的那个信号置0,再定时两个高电平时间差,到时把高电平时间长的按个信号置0,然后,定时(2.5-较长那个高电平时间),在第二个 2.5ms开始时,把S3、S4置1,接下来和上面S1、S2一样,以此类推, 在六个2.5ms 中输出12路pwm信号来控制舵机。原理图如图1. 通过超声模块来控制机器人前进、后退、向前的左转、向前的右转、向后的左转、向后的右转几个动作。
基于单片机的灭火机器人设计 摘要 该文设计是一款基于单片机的灭火机器人模型的设计。该设计以STC89C52单片机为控制核心的系统,通过自制火焰传感器用于火焰探测,红外光电传感器用于探测障碍物,L298驱动电机前后转动实现机器人平面运动。 该系统火焰探测采用自制的六路火焰传感器,其中是由五路远红外接收二极管和一路近红外接收二极管构成,它与目前其他火焰探测器相比,具有火焰探测精确度相对高、结构较为简单,性能可靠等优点。避障则用E18-D50NK型号的光电传感器,该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点。此设计以数字集成电路技术为基础并以单片机技术为核心,依据传感器的信号传入单片机实现各种指令处理。 实验结果表明,该设计具有成本低、可靠性高、灭火速度快、安装调试方便等特征,具有较好的应用前景。 关键词:STC89C52单片机光敏晶体管红外光电开关 L298N E18-D50NK
Fire fighting robot hardware design based on single chip microcomputer Abstract In this paper, the design model for the design of a microcontroller-based fire-fighting robot. System to STC89C52RC microcontroller for control core, innovation homemade flame sensor is used to measure the source of fire, use infrared receiverdiode to detect the roadblock. The system use six innovation homemade flame sensors which consist of five remote Infrared receiverdiodes and one close Infrared receiverdiode to measure the source of fire,which compare other measurements with high precision, simple structure, reliable performance characteristics. Obstacle avoidance uses the E18 - D50NK models of photoelectric sensor, the sensor has a long detection distance, small interference by visible light, the price is cheap, easy to assemble and convenient use, etc. This design is based on digital integrated circuit technology and single-chip microcomputer technology as the core, according to the sensor signal to microcontroller processing all kinds of instructions. The experimental results show that the design of low cost, high reliability, fire fast, easy installation features, very suitable for large fire risk coefficient, has a good application prospect. Keywords:STC89C52 microcontroller; photosensitive transistor; infrared photoelectric switch; L298N;E18-D50NK
深圳大学期末考试试卷 开/闭卷开卷A/B 卷N/A 课程编号1303270001 1303270002 课程名称EDA 技术与实践(2)学分2.0 命题人(签字) 审题人(签字) 2015 年10 月20 日 题号一二三四五六七八九十基本题 总分 附加题 得分 评卷人 设计考试题目:完成一个集成电路或集成系统设计项目 基本要求:2-3 位同学一组,完成一个完整的集成电路设计项目或是一个集成系统设计 项目。 规格说明: 1. 题目自定。 1) 集成电路设计项目 i. 若为IC 设计项目需要完成IC 设计的版图。 ii. 若采用FPGA 实现数字集成电路设计,需要进行下板测试。 2) 集成系统设计项目,需使用FPGA 开发板或嵌入式开发板,完成一个完整的集成 系统作品。 3) 作品需要课堂现场演示,最后提交报告,每个小组单独一份报告,但需阐述各个 成员的工作。 2. 评分标准: 评价好较好一般未完成完成度40 30 25 15 演示效果30 25 20 15 报告评分30 25 20 15 《EDA 技术与实践(2)》试卷 1 卷第 1 页共28 页
2015 年第二学期,建议作品内容: 完成一个行走机器人,基本要求 o 2-8 只脚 o 能行走 o 可以用单片机,嵌入式,FPGA 方案 一、设计目的: 通过设计一个能够走动的机器人来增加对动手能力,和对硬件电路设计的 能力,增强软件流程设计的能力和对设计流程实现电路功能的能力,在各 个方面提升自己对电子设计的能力。 二、设计仪器和工具: 本设计是设计一个能走动的机器人,使用到的仪器和工具分别有:sg90 舵 机12 个、四脚机器人支架一副、单片机最小系统一个、电容电阻若干、 波动开关一个、超声遥控模块一对、杜邦线若干、充电宝一个。 三、设计原理: 本次设计的机器人是通过51 单片机控制器来控制整个电路的。其中,舵 机的控制是通过产生一个周期为20 毫秒的高电平带宽在0.5 到2.5ms 之间的pwm 信号来控制。12 路Pwm 信号由单片机的定时器来产生。51 单片机产生12 路pwm 信号的原理是:以20 毫秒为周期,把这20 毫秒分割成 8 个 2.5ms,因为,每个pwm 信号的高电平时间最多为 2.5ms,然后在前 六个2.5ms中分别输出两个pwm 信号的高电平,例如,在第一个 2.5ms中输出第一个和第二个pwm 信号的高电平时,首先开始时,把信号S1、S2 都置1,然后比较两个高电平时间,先定时时间短的高电平时间,把高电平时间短的那个信号置0,再定时两个高电平时间差,到时把高电平时间长的按个信号置0,然后,定时( 2.5-较长那个高电平时间),在第二个 2.5ms 开始时,把S3、S4 置1,接下来和上面S1、S2 一样,以此类推, 在六个2.5ms 中输出12 路pwm 信号来控制舵机。原理图如图 1. 第一个2.5ms 0 2.5 通过超声模块来控制机器人前进、后退、向前的左转、向前的右转、向后的左 转、向后的右转几个动作。 《数字系统设计》试卷 1 卷第 2 页共28 页
基于单片机的扫地机器人的设计开题报告沈阳航空航天大学 北方科技学院 论文题目: 基于单片机的扫地机器人的设计专业: 通信工程学号: B24121129 学生姓名: 王新指导教师: 马凤霞 2016年 3 月 21 日 一、立题依据 1、选题目的 自动扫地机器人,是一种智能扫地、吸尘工具,是一种配备了微电脑系统的电动保洁设备,它能按照人们的设置清洁房间的某一特定部分或全部。清洁机器人最早出现在于美国,随后发展的欧美,风靡港澳台,90年代中期进入大陆。现在市场上的自动扫地机器人主要几种品牌:(TOMEFON德国)斐纳扫地机器人,(irobot美国)irobot扫地机器人,(Proscenic台湾)浦桑尼克扫地机器人,(科沃斯中国)科沃斯扫地机器人,(PHILIPS荷兰)飞利浦扫地机器人等。 人类的一只脚已经迈进了机器人时代的大门,中国10年内机器人将融入市民日常生活,机器人将和汽车一样成为生活必需用具。这些机器人从用途上看,有用于教育类的机器人,有用于服务类的机器人,有用于制造类的机器人,等等。其中自动扫地机器人就属于服务类的机器人。机器人的发展就像上世纪80年代的个人电脑、上世纪90年代中期的手机一样,正处于产业真正起飞的前夕,巨大的市场前景已经展现。资料显示,2003年至2007年间,全球机器人以每年40%左右的速度增长。据统计,到2009年底,全球投入使用的服务型机器人已达到450万台。 2、选题的意义
自动扫地机器人优于普通吸尘器的地方主要体现在:省时、省力,整个清洁过程中不需要人控制,减轻您操作负担;还比一般吸尘器的噪音小,清洁房间的过程免受噪音之苦;还可以净化空气,内置活性炭、吸附空气中的有害物质,粉尘净化率高达96%,清洁效率接近100%;轻便小巧:轻松打扫普通吸尘器清理不到的死角。总之,自动扫地机器人,具有操作简单,使用方便、智能、安全、、清洁效果显著的特点。 3、国内外研究现状 现在国内外市场上的扫地机器人推出速度如雨后春笋,国外品牌中,美国iRobot和德国TOMEFON扫地机器人比较热门,国内目前比较知名的有科沃斯、地贝、福玛特等,其中作为进入扫地机器人市场的Proscenic,也是比较热门的一个品牌。 研究现状:自动扫地机器人作为服务机器人领域中的一个新产品,尽管目前国内在这方面的研究开发方面已经取得一定的成果,但是仍有许多关键技术问题需要解决或提高,如路径规划就是其中的一个比较重要的技术。有的可在房间内随机移动,有的能在 1 单个房间内比较简单地以一定的路线移动(不能100%走遍)。事实上,虽然有一些公司推出了一些样品或产品,但却不能达到满意程度:清洁效果不佳,遍历时间长。 目前,在一些发达国家的办公室、工厂、车站、机场等场所已广泛使用到自动扫地机器人。随着科学技术的进步和社会的发展,人们希望更多地从繁琐的日常事务中解脱出来,这使得自动扫地机器人进入人家庭成为可能。如果自动扫地机器人性价比足够高,那么自动扫地机器人市场将会被看好。 二、研究方案
一种通用机器人单片机控制器 王佳庆 【摘要】文中介绍了一种通用性较强的单片机控制系统,可以对5根轴进行联动控制,可驱动步进电机或直流伺服电机,并具有足够的开关量输入/输出端口,可以满足一般机器人的控制要求。较强的单片机功能可以用来实现智能机器人的特殊功能。 关键词:机器人单片机 The Monolithic Processor Controller Of A General Robot Wang Jiaqing Wang Fudong Abstract: A control system is introduced which can be generally used.This control system can control the continuall movement of five shafts, drive single step driver or direct current servo driver, and meet normal requirements of controlling robots with enough i/o ports.The monolithic processor which has strong functions can be used to achieve the special functions of intelligent robots. Key Word: Robot, monolithic processor
1 引言 用机器人来代替人进行操作、实现单机自动化、建立自动化生产线甚至自动化工厂,可节省劳动力、提高生产效率和生产水平、改善劳动条件。自1961年世界上第一台现代机器人诞生,近40年来,机器人作为人类的新型生产工具被广泛应用于汽车、电子、核工业、服务业、医疗等领域,从事着焊接、喷漆、搬运、装配等工作,显示出其强大的生命力。目前,国外研制的机器人已进入第三代,不仅具有触觉、听觉、视觉和温度感觉,还能识别图象,能讲简单的语言。 我国在机器人的开发和应用方面虽起步较晚,但近年发展很快。为了发展完善原有机器人实验设备,更为今后研制更高级的机器人积累经验,我们研制开发了一种关节型教学机器人。 2单片机机器人控制系统 本关节型教学机器人采用IBM-PC计算机和单片机控制器进行两级控制,下级的单片机控制器具有存储功能,可以脱离上位机独立控制机器人的运行。上位机主要进行编程与调试,目标程序可以传送到单片机控制器内存储,在需要时加以运行。 2.1结构 单片机控制系统结构如图1所示,由单片机主机板、接口、
单片机在制作机器人方面的应用 发表时间:2016-11-18T17:31:19.737Z 来源:《低碳地产》2016年10月第19期作者:芦卿[导读] 【摘要】机器人工程属于具有综合性质的科学,其能够将机械理论、自动控制、电子技术等学科全面涵盖。目前,智能机器人运用单片机技术仍没有较为深入的研究,随着逐渐完善单片机控制系统,在智能机器人的研究工作中有着越来越重要的作用。江苏常州技师学院江苏常州 213000 【摘要】机器人工程属于具有综合性质的科学,其能够将机械理论、自动控制、电子技术等学科全面涵盖。目前,智能机器人运用单片机技术仍没有较为深入的研究,随着逐渐完善单片机控制系统,在智能机器人的研究工作中有着越来越重要的作用。 【关键词】单片机;制作机器人;技术应用 引言 单片机控制技术可以将外部总线、内部总线以及内存、CPU等系统全面提供,同时还可以在外部总线系统中为外围设备提供定时器和通讯接口等。一些单片机技术还可以把网络、图像、声音等进行集成,从而实现强大且全面的控制系统。 一、智能机器人使用技术简介、制造技术 机器人的定义是多种多样的,究其原因是它具有一定的模糊性。一套机器人主要包括:(1)机械设备,比如可以与周边环境进行互交的车轮盘平台、手臂或者别的装备。(2)设备上面或周围的传感器,可感知周边环境并向装备提供有用信息反馈。(3)根据设备运行情况处理传感输入,并且按照实际情况控制系统执行指定动作。机器人的最原始形式是工业机器人,它可以有效地提高产品的产量和质量,能够很有效的改善人们的劳动条件,在装配、切割、焊接、除锈、喷漆等方面得到广泛的应用,可以预计在不久的将来社会中,机器人必将会得到广泛应用和发展,这是必然的发展趋势和根本结果。 研究机器人的专家们,从应用需要出发将机器人分成了两大类,即工业机器人和特种机器人。所谓工业机器人就是为工业制造业多关节机械手或多自由度机器人,而特种机器人则是除上述工业机器人之外的、用于非制作业并服务于人类的各种先进机器人。当前,国际上研究机器人的学者们,从应用需要出发,将机器人也同样分成两类:制作环境下的工业机器人和非工业制造环境下的服务与仿生机器人。 二、单片机在制作机器人方面的应用 1、控制系统 机器人的一系列动作的完成需要应用多舵机分时控制的原理。具体而言,需要给每一个舵机定义一个角度所对应的脉宽变量,同时要赋予初始值为舵机的中间角度,此外还需要给定时器设定初值,也就是舵机PWM波脉宽初值。当每次定时器时间到产生溢出中断,进入中断服务子程序后,首先需要把所有的舵机控制输出口拉低清零,然后给某一位置高,并赋予PWM脉宽的定时时间,最后移位使下次进入中断时给下一位置高,也就是把时间片传递到了下一个舵机的驱动。舵机的运行过程需要从电源吸纳较大的电流,如果舵机和单片机控制器用同一个电源,舵机与单片机控制器可能产生较大的干扰。所以,舵机和单片机控制器应用两个电源进行供电,两者不共地,通过光耦进行隔离,同时舵机的供电电源尽量选用输出功率较大的开关电源。舵机控制器占用单片机的一个SCI串口。串口用来接收上位机传送过来的控制命令,从而调节通道输出信号的脉冲宽度。 2、机械系统结构 有很多方式移动的机器人,但是大致分两种:车轮式和足步式两种,车轮式移动方式的机器人系统技术比较成熟,控制技术容易,足步式控制技术困难较大,但是随着传感器技术、微控制器的日益发展,足步式移动机器人也有了巨大发展。轮式机器人的总体结构比较简单,主体有圆形底座,长方形保护壳与摄像头等,底座选用8MM厚铝板,轮子、电机以及传动装置和码盘等均固定其上。保护壳是3MM的铝板,并固定有铝制型材作为支架,里面装有控制驱动的印刷线路板、供电电源模块,四个12V蓄电池,两个提供给电路,另两个给直流伺服电机供电。 3、超声波传感器检测电路 超声波传感器电路的主要功能是距离测量,超声波传感器电路主要是由超声波发射电路以及接收电路组成。超声波接收电路主要采用集成电路CX20106A,其是一种红外线检波接收的专用芯片,通常应用于电视机的红外遥控接收器。红外遥控常用的载波频率38kHz和测距的超声波频率40kHz比较接近,因此可采用它制作超声波接收电路。实验证明,用CX20106A接收超声波具有较强的抗干扰能力和灵敏度。CX20106A的第5脚电阻决定着所接收的中心频率,220kΩ电阻决定了其接收的中心频率为40kHz。若CX20106A接收到40kHz的信号时,则会在第7脚产生一个低电平下降脉冲,这个信号能够接到单片机的外部中断引脚当作中断信号输入。 4、驱动模块电路 单片机控制技术应用于智能机器人的系统中,驱动模块电路起着非常重要的作用,其主要功能是把弱电流信号输出,用一定的设备材料加强放大弱电流信号,实现驱动继电器全面控制和操作电机强度,从而完成电机驱动的各项操作。驱动模块电路内三极管的主要作用是保护基极,继电器与双掷开关的作用相类似,继电器可以构成正反转的电机,同时对回路进行控制,保证机器人可以完成前进及后退动作。驱动模块线路的主要优势是在输入电流信号时不会影响控制系统,并且可以为驱动电机的正常运行提供相应的电流,保证智能机器人可以稳定的运行。 5、电源模块 电源模块是机器人各大控制模块的能源保证。机器人运行耗电量通常较大,因此可采用7.2V1300mA的锂电池进行供电。如果各个模板采用单电源进行供电,电路比较简单,由于舵机的额定电压是6V,如果电源直接接舵机机会有损舵机的寿命,而且PWM驱动的舵机会在通电的瞬间造成电流波动,导致造成电源的电压波动不稳,从而造成单片机和传感器模块工作电压出现波动,甚至造成信号错误传输。因此,通过多电源分部供电方案能够将舵机驱动电源和单片机以及传感器电源完全隔离开来,舵机经LM2596稳压后采用6V的电压进行供电,单片机和传感器则经LM2940稳压到5V工作电压给控制电路进行供电。单片机的传感器控制部分与电机驱动部分采用光电藕合器进行连接,避免通过电源部分引入对控制系统的干扰,可以避免脉冲波对舵机运行的干扰,从而在很大程度上提高了系统的稳定性和可靠性。 三、机器人运用单片机控制系统实现的具体功能