机械基础《习题册》答案(部分) 绪论 任务 一、填空题 1、人为的实体,确定相对,能量,有用机械功; 2、动力部分,传动部分,执行部分,控制部分; 3、动力,工作,信息; 4、运动,力; 5、机器,机构; 6、构件,零件; 7、直接接触,可动; 8、低副,高副; 9、移动副,转动副,螺旋副; 10、电气,液压; 11、往复移动,连续转动; 12、机构运动简图。 二、判断题 1 ×2×3√4×5√6√7×8√9×10× 三、选择题 1 B 2D 3C 4B 5B 6D 7C 四、名词解释 机构:若干构件通过运动副连接而成的各部分间具有确定相对运动的构件组合体。 构件:机构中独立的运动单元; 零件:机器中最小的制造单元; 运动副:两个构件直接接触且能够产生相对运动的连接。 五、简答题 1、动力部分:机器工作的动力源; 执行部分:直接完成机器预定工作任务的部分; 传动部分:将动力部分的运动和动力传递给执行部分的中间环节; 控制部分:控制机器动作的其他组成部分; 辅助部分 2、构件是机器中取小的运动单元,零件是机器中最小的制造单元。构件可以是一个零件,也可以是由若干个零件组成,如内燃机中的连杆。 3、低副是面接触,易加工,承载能力大,效率低,不能传递复杂的运动; 高副是点红接触,难加工,易磨损,寿命低,能传递复杂的运动。
模块一 任务一 一、填空题 1、主要参数,接头,安装方法; 2、主动带轮,从动带轮,传动带; 3、摩擦型,啮合型; 4、平带,V 带,多楔带,圆带; 5、矩形、内表面; 6、开口传动,交叉传动,半交叉传动; 7、黏接,带扣,螺栓; 8、打滑,其他零件损坏。 二、判断题 1× 2√ 3√ 4× 5√ 6√ 7√ 三、选择题 1D 2B 3C 4C 5A 四、简答题 2、1)改变中心距的方法:①定期张紧,②自动张紧; 2)使用张紧轮。 任务二 一、填空题 1、等腰梯形,两侧面; 2、伸张层,压缩层; 3、帘布芯,绳芯; 4、7,Y ,E ; 5、型号,基准长度,标准编号; 6、轮缘,轮毂,轮辐; 7、铸铁,HT150,HT200; 8、定期检查,重新张紧,张紧力; 9、平行,重合; 10、带齿,轮齿; 11、链,齿轮; 12、>30m/s ,104~5×105r/min ; 13、平带,V 带 二、判断题 1√ 2× 3× 4√ 5√ 6× 7√ 8× 9× 三、选择题 1B 2C 3D 4D 5C 6D 7A 8C 9A 10D 11A 五、简答题 1、普通V 带分为Y 、Z 、A 、B 、C 、D 、E 七种型号,按次序其截面面积依次增大,传递的功率随截面面积的增大而增大。 六、计算题 1、解:5.21002501212=== d d d d i
坐标系ouvw 除绕坐标系oxyz的坐标轴旋转外, 还可以绕它本身的坐标轴旋转。如果坐标系ouvw 绕坐标系oxyz 的坐标轴旋转, 则可对旋转矩阵左乘相应的基本旋转 矩阵; 如果ouvw 绕本身的坐标轴旋转,则可对旋转矩阵右乘相应 的基本旋转矩阵。 2目前机器人的运动学和动力学研究主要向下面所述的几个方 面深人发展: 1.机器人的轨迹规划。 2.切实可行的设计和评价机器人的动力学方法。 3.适应机器人的实时计算,减少计算时间,提高 计算效率。 4.解决控制系统的反馈、稳定等方面的问题。 5.随着机器人以高速、高精度发展,考虑构件弹性及振动影响的动力学研究。 6.改进和完善动力学建模方法。 3国内主要采用open GL软件实现机器人仿真 4运动学和动力学模型简化条件 (1) 假设机器人各杆件是刚性的;忽略各杆件的变形,都当作 刚性构件来处理; (2) 各构件的摩擦忽略不计; 目前,已经能够对一般结构的六自由度串联机器人进行逆运动 学求解,但是要获得显式解,只有满足下列两个充分条件之一: a.3 个相邻关节轴交于一点。 b.3 个相邻关节轴平行。 5假定坐标系oxyz 是三维空间中的固定坐标系(在机器人运动学中为总体坐标系),坐标系ouvw 固定在机器人杆件上并随杆件一起运动(此坐标系为附体坐标系) 6齐次坐标是用n+1 维坐标来描述n 维空间的位置 7在机器人杆件关节上建立坐标系有两种方法:一是把杆件坐标 系建立在每个杆件的下关节处;二是把杆件坐标系建立在每个杆件 的上关节处。 8 i 杆件的坐标系设置在i+1 号关节上,并固定i 关节, 坐标系{i}与杆件i 无相对运动 这种传递矩阵是把i 杆件的坐标系设置在i 号关节上,并固定i关节, 坐标系{i}与杆件i 无相对运动
一、填空 1、构件是机器的运动单元体;零件是机器的制造单元体;部件是机器的装配单元体。 2、平面运动副可分为低副和高副,低副又可分为转动副和移动副。 3、运动副是使两构件接触,同时又具有确定相对运动的一种联接。平面运动副可分为低副和高副。3、平面运动副的最大约束数为 2 。 4、机构具有确定相对运动的条件是机构的自由度数目等于主动件数目。 5、平面机构中,两构件通过点、线接触而构成的运动副称为高副。 6、机构处于压力角α=90°时的位置,称机构的死点位置。曲柄摇杆机构,当曲柄为原动件时,机构无死点位置,而当摇杆为原动件时,机构有死点位置。 7、铰链四杆机构的死点位置发生在从动件与连杆共线位置。 8、在曲柄摇杆机构中,当曲柄等速转动时,摇杆往复摆动的平均速度不同的运动特性称为:急回特性。 9、摆动导杆机构的极位夹角与导杆摆角的关系为相等。10、凸轮机构是由机架、凸轮、从动件三个基本构件组成的。11、为保证带传动的工作能力,一般规定小带轮的包角α≥120°。12、链传动是由主动链轮、从动链轮、绕链轮上链条所组成。13、链传动和带传动都属于挠性件传动。14、齿轮啮合时,当主动齿轮的齿根_推动从动齿轮的齿顶,一对轮齿开始进入啮合,所以开始啮合点应为从动轮齿顶圆与啮合线的交点;当主动齿轮的齿顶推动从动齿轮的齿根,两轮齿即将脱离啮合,所以终止啮合点为主动轮齿顶圆与啮合线的交点。15、渐开线标准直齿圆柱齿轮正确啮合的条件为模数和压力角分别相等。16、_齿面磨损__和_因磨损导致的轮齿折断__是开式齿轮传动的主要失效形式。17、渐开线齿形常用的加工方法有仿形法和范成法两类。18、斜齿圆柱齿轮的重合度大于直齿圆柱齿轮的重合度,所以斜齿轮传动平稳,承载能力高,可用于高速重载的场合。19、在蜗轮齿数不变的情况下,蜗杆的头数越少,则传动比就越大。20、普通圆柱蜗杆和蜗轮传动的正确啮合条件是_ m a1=m t2、αa1=αt2、λ=β_。21、轮系运动时,所有齿轮几何轴线都固定不动的,称定轴轮系轮系,至少有一个齿轮几何轴线不固定的,称周转星轮系。22、轴的作用是支承轴上的旋转零件,传递运动和转矩,按轴的承载情况不同,可以分为转轴、心轴、传动轴。23、机械静联接又可以分为可拆联接和不可拆联接,其中键联接、螺纹联接、销联接属于可拆连接。24、平键的工作面是键的两侧面。25、楔键的工作面是键的上下两面。26、滑动轴承中所选用的润滑油,其粘度越大,则其承载能力越大。27、普通平键的剖面尺寸(b×h),一般应根据轴的直径按标准选择。28、滚动轴承内圈与轴颈的配合采用基孔制,外圈与轴承孔的配合采用基轴制。二、判断题(正确的打√,错误的打×)1、所有构件一定都是由两个以上零件组成的。(×)2、铰链四杆机构中,传动角γ越大,机构传力性能越高。(√)3、极位夹角是曲柄摇杆机构中,摇杆两极限位置的夹角。 (×)4、机构处于死点位置时,其传动角等于90°。 (×)5、凸轮轮廓的形状取决于从动件的运动规律。(×) 6、带传动的弹性滑动是不可避免的,打滑是可以避免的。 (√ )7、V带型号中,截面尺寸最小的是Z型。(×)8、基圆以内无渐开线。(√)9、在直齿圆柱齿轮传动中,忽略齿面的摩擦力,则轮齿间受有圆周力、径向力和轴向力三个力作用。(×)10、蜗杆传动一般用于大速比的场合。(√)11、蜗杆传动一般用于传动大功率、大速比的场合。(×)12、定轴轮系的传动比等于始末两端齿轮齿数之反比。(×)13、楔键的顶底面是工作面。(√)14、设计键联接时,键的截面尺寸通常根据传递转矩的大小来选择。(×)15、在螺纹联接的结构设计中,通常要采用凸台或凹坑作为螺栓头和螺母的支承面,其目的是使螺栓免受弯曲和减小加工面。(√)16、螺纹联接是可拆联接。 (√)17、滚动轴承的基本额定动载荷C值越大,则轴承的承载能力越高。(√ ) 18、在相同工作条件的同类型滚动轴承,通常尺寸越大,其寿命越长。(√) 1、在如图所示的齿轮—凸轮轴系中,轴4称为(A) A.零件 B.机构 C.构件 D.部件 2、平面运动副所提供的约束为(C) A.1 B.2 C.1或2 D.3 3、若两构件组成低副,则其接触形式为(A) A.面接触 B.点或线接触 C.点或 面接触 D.线或面接触 4、机构具有确定相对运动的条件是(A) A.机构的自由度数目等于主动件数目 B.机构的自由度数目大 于主动件数目 C.机构的自由度数目小于主动件数目 D.机构的自由度数目大 于等于主动件数目 5、铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,则为了获得曲柄摇杆机构,其机架应取(B) A.最短杆 B.最短杆的相邻杆 C.最短杆的相对杆 D.任何一杆 6、在凸轮机构的从动件选用等速运动规律时,其从动件的运动(A) A.将产生刚性冲击 B.将产生柔性冲击 C.没有冲击 D.既有刚性冲击又有柔性冲击 7、带传动的主要失效形式是带的(A) A.疲劳拉断和打滑 B.磨损和胶合 C.胶合和打滑 D.磨损和疲劳点蚀 8、带传动中弹性滑动现象的产生是由于(C) A.带的初拉力达不到规定值 B.带与带轮的摩擦系数过小 C.带的弹性变形 D.带型选择不当 9、 (A )是带传动中所固有的物理现象,是不可避免的。
1. 自由度:指描述物体运动所需要的独立坐标数。 2. 机器人工作载荷:机器人在规定的性能范围内,机械接口处能承受的最大负载量(包括手部)。 3. 柔性手:可对不同外形物体实施抓取,并使物体表面受力比较均匀的机器人手部结构。 4. 制动器失效抱闸:指要放松制动器就必须接通电源,否则,各关节不能产生相对运动。 5. 机器人运动学:从几何学的观点来处理手指位置与关节变量的关系称为运动学。 6. 机器人动力学:机器人各关节变量对时间的一阶导数、二阶导数与各执行器驱动力或力矩之间的 关系,即机器人机械系统的运动方程。 7. 虚功原理:约束力不作功的力学系统实现平衡的必要且充分条件是对结构上允许的任意位移(虚位 移)施力所作功之和为零。 8. PWM 驱动:脉冲宽度调制驱动。 9. 电机无自转:控制电压降到零时,伺服电动机能立即自行停转。 10. 直流伺服电机的调节特性:是指转矩恒定时,电动机的转速随控制电压变化的关系。 11. 直流伺服电机的调速精度:指调速装置或系统的给定角速度与带额定负载时的实际角速度之 差,与给定转速之比。 12. PID 控制:指按照偏差的比例、积分、微分进行控制。 13. 压电元件:指某种物质上施加压力就会产生电信号,即产生压电现象的元件。 14. 图像锐化:突出图像中的高频成分,使轮廓增强。 15. 隶属函数:表示论域U 中的元素u 属于模糊子集A 的程度,在[0, 1]闭区间内可连续取值。 16. 脱机编程:指用机器人程序语言预先进行程序设计,而不是用示教的方法编程。 17. AUV :无缆自治水下机器人,或自动海底车。 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 4.机器人控制系统的基本单元有哪些? 5.直流电机的额定值有哪些? 6.常见的机器人外部传感器有哪些? 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成? 9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些? 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类? 12.仿人机器人的关键技术有哪些? 1.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2) 机器人运动学;(3) 机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。 2.答:目前常用的有如下几种形式:(1)横梁式。(2)立柱式。(3)机座式。(4)屈伸式。 4.答:构成机器人控制系统的基本要素包括: (1) 电动机,(2) 减速器,(3) 驱动电路,(4) 运动特性检测传感器,(5) 控制系统的硬件,(6) 控制系统的软件, 5.答:直流电动机的额定值有以下几项:(1)额定功率,(2)额定电压,(3)额定电流,(4)额定转速, 6.答常见的外部传感器包括 触觉传感器,分为;接触觉传感器、压觉传感器、滑觉传感器和力觉传感器。距离传感器,包括超声波传感器,接近觉传感器,以及视觉传感器、听觉传感器、嗅觉传感器、味觉传感器等。 7.答:在脉冲回波式中,先将超声波用脉冲调制后发射,根据经被测物体反射回来的回波延迟时间Δt ,计算出被测物体的距离R ,假设空气中的声速为v ,则被测物与传感器间的距离R 为: /2R v t =?? 如果空气温度为T (℃),则声速v 可由下式求得: ()331.50.607m/s v T =+ 8.答:(1) 景物和距离传感器,常用的有摄像机、CCD 图像传感器、超声波传感器和结构光设备等;(2) 视频信号数字化设备,其任务是把摄像机或者CCD 输出的信号转换成方便计算和分析的数字信号;(3)
机械基础习题参考答案 SANY GROUP system office room 【SANYUA16H-
一机械传动概述 1.什么是零件?什么是构件?构件与零件的关系是什么? 零件:构成机械最小单元的,也是制造的最小单元。 构件:由若干零件组成,能独立完成某种运动的单元。 2. 2..什么是机器?什么是机构?机构与机器的关系是什么? 机器:是执行机械运动,变换机械方式或传递能量的装置。 机构:由若干零件组成,可在机械中转变并传递特定的机械运动。 3.什么叫做运动副?常见的运动副有哪些? 运动副:构件之间的接触和约束。有那些:低副,高副,平副。 4.什么是低副?什么是高副?在平面机构中的低副和高副各引入几个约束? 低副:两个构件之间为面接触形成的运动副。高副:两个构件之间为点接触形成的运动副。二常用机构 1.何谓连杆机构?何谓铰链四杆机构?判别各铰链四杆机构的类型什么是曲柄?什么是摇杆?什 么是连杆? 连杆机构:由一些刚性杆件用铰链和滑道等连接而成的机构。 铰链四杆机构:在平面连杆机构中,有一种由四个构件相互用铰链连接而成的机构。 2.铰链四杆机构有哪几种基本形式?试说明它们的运动特点,并举出应用实例。 3种1)取与最短杆相邻的任何一杆为机架,并取最短杆为曲柄时,为曲柄摇杆机构。2)取最短杆为机架时,为双曲柄机构。3)取最短杆对面的杆为机架时,为双摇杆机构。 3.试述铰链四杆机构类型的判别方法。根据图中注明的尺寸,。 a双曲柄机构(方法:最短杆固定)b双摇杆机构(方法:与最短杆相对的杆固定)c曲柄摇杆机构(方法:与最短杆相邻的杆固定)d双摇杆机构(方法:任意杆固定)
第一章 1机器人组成系统的4大部分:机构部分、传感器组、控制部分、信息处理部分 2机器人学的主要研究内容:研究机器人的控制与被处理物体间的相互关系 3机器人的驱动方式:液压、气动、电动 4机器人行走机构的基本形式:足式、蛇形式、轮式、履带式 5机器人的定义:由各种外部传感器引导的、带有一个或多个末端执行器、通过可编程运动,在其工作空间内对真实物体进行操作的软件可控的机械装置 6机器人的分类:1工业机器人2极限环境作业机器人3医疗福利机器人 7操作臂工作空间形式:1直角坐标式机器人2圆柱坐标式机器人3球坐标式机器人 4 scara 机器人5关节式机器人 8机器人三原则 第一条:机器人不得伤害人类. 第二条:机器人必须服从人类的命令,除非这条命令与第一条相矛盾。 第三条:机器人必须保护自己,除非这种保护与以上两条相矛盾。 第二章 1、什么是位姿:刚体参考点的位置和姿态 2、RPY 角与欧拉角的共同点:绕固定轴旋转的顺序与绕运动轴旋转的顺序相反并且旋转角度相同,能得到相同的变换矩阵,都是用三个变量描述。欧拉角为左乘RPY 角为右乘。 RPY 中绕x 旋转为偏转绕y 旋转为俯仰绕z 旋转为回转 3 、矩阵的左乘与右乘:左乘(变换从右向左)—指明运动相对于固定坐标系 右乘(变换从左向右)—指明运动相对于运动坐标系 4、齐次变换 T A B :表示同一点相对于不同坐标系{B}和{A}的变换,描述{B}相对于{A}的位姿 5、自由矢量:完全由他的维数、大小、方向,三要素所规定的矢量 6、线矢量:由维数、大小、方向、作用线,四要素所规定的矢量 7、齐次变换矩阵 ?? ????=1000 0B A A B A B P R T 8、其次坐标变换?? ??????????=???? ??11000 10P P R P B B A A B A R A B 为旋转矩阵0B A P 为{B}的原点相对{A}的位置矢量 9、旋转矩阵:绕x 轴??????????-a a a a cos sin 0sin cos 0001y 轴??????????-a a a a cos 0sin 010sin 0cos z 轴?? ?? ? ?????-1000cos sin 0sin cos a a a a 10、变换矩阵求逆:?? ? ? ??-=10 0B A T A B T A B B A P R R T 已知B 相对于A 的描述求A 相对于B 的描述
一机械传动概述 1.什么是零件什么是构件构件与零件的关系是什么 零件:构成机械最小单元的,也是制造的最小单元。 构件:由若干零件组成,能独立完成某种运动的单元。 2. 2..什么是机器什么是机构机构与机器的关系是什么 机器:是执行机械运动,变换机械方式或传递能量的装置。 机构:由若干零件组成,可在机械中转变并传递特定的机械运动。 3.什么叫做运动副常见的运动副有哪些 运动副:构件之间的接触和约束。有那些:低副,高副,平副。 4.什么是低副什么是高副在平面机构中的低副和高副各引入几个约束 低副:两个构件之间为面接触形成的运动副。高副:两个构件之间为点接触形成的运动副。 二常用机构 1.何谓连杆机构何谓铰链四杆机构判别各铰链四杆机构的类型什么是曲柄什么是摇杆什 么是连杆 连杆机构:由一些刚性杆件用铰链和滑道等连接而成的机构。 铰链四杆机构:在平面连杆机构中,有一种由四个构件相互用铰链连接而成的机构。 2.铰链四杆机构有哪几种基本形式试说明它们的运动特点,并举出应用实例。 3种1)取与最短杆相邻的任何一杆为机架,并取最短杆为曲柄时,为曲柄摇杆机构。2)取最短杆为机架时,为双曲柄机构。3)取最短杆对面的杆为机架时,为双摇杆机构。 3.试述铰链四杆机构类型的判别方法。根据图中注明的尺寸,。 a双曲柄机构(方法:最短杆固定)b双摇杆机构(方法:与最短杆相对的杆固定)c曲柄摇杆机构(方法:与最短杆相邻的杆固定)d双摇杆机构(方法:任意杆固定) 4.试述曲柄滑块机构的组成和运动特点。 组成:曲柄,连杆,滑块及机架。特点:若曲柄为主动件,当曲柄作整周连续转动时,可通过连杆带动滑块作往复直线运动;反之若滑块为主动件,当滑块作往复直线运动时,又可通过连杆带动曲柄作整周连续转动。 5.什么是机构的急回特性在生产中怎样利用这种特性 急回特性:平面连杆机构中的摇杆往复摆动时所需时间一般并不相同,要求返回空行程明显快于工作行程。
0.1 简述工业机器人的定义,说明机器人的主要特征。 答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。 1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。 2.机器人具有通用性,工作种类多样,动作程序灵活易变。 3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。 4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。 0.2工业机器人与数控机床有什么区别? 答:1.机器人的运动为开式运动链而数控机床为闭式运动链; 2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统; 3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。 4.机器人灵活性好,数控机床灵活性差。 0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。 重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。 工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。 工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为 手臂末端最大的合成速度(通常在技术参数中加以说明)。 承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。 0.6什么叫冗余自由度机器人? 答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。 0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
第一章静力学 一、填空 1、力对物体的作用效应取决于力的三要素,即力的力的大小、力的方向和力的作用点。 2、平衡是指物体相对于地球保持静止或作匀速直线运动的状态。 3、柔性约束对物体的作用力为沿柔体伸长的方向的_拉_力。 4、铰链约束分为__固定铰链__和_ 活动铰链__。 5、活动铰链的约束反力必通过_铰链中心__并与__支承面__相垂直。 6、固定铰链的约束反力是随转动零件所处的位置的变化而变化的,通常可用两个相互垂直的分力表示。约束反力的作用线必定通过铰链的中心。 7、固定端约束反力一般情况下可分解为相互垂直的两个分力和一个阻止其转动的力偶矩。 8、力对物体的作用效果是使物体运动状态发生变化或使物体产生变形.。 9、平面汇交力系平衡的几何条件是_力多边形自行封闭_;平衡的解析条件是_力系中所有各力在两坐标轴 上的投影的代数和分别为零___。 10、作用于物体上同一点的两个力,可以合成为一个合力,合力的作用点为该两力的作用点,合力的大 小和方向用该两个分力为邻边所构成的平行四边形的对角线表示。 11、力偶对物体的转动效应取决于_力偶矩的大小_、_力偶的转向__和_力偶作用面的方位__三要素。 12、力偶是指_作用于同一物体上大小相等,方向相反,而作用线不在同一直线上的一对平行力_。 13、物体受到的力一般可分为两类,一类是使物体产生运动的力称为主动力;另一类是约束体对物体的 运动起限制作用的力称为约束反力。 14、作用在刚体上各个力的作用线如果均在同一平面内,则这种力系称为平面力系;平面力系中如果各 力的作用线都汇交于一点,这样的力系又叫做平面汇交力系;若平面力系中各力的作用线均相互平行, 这种力系称为平面平行力系;作用在物体上的各力的作用线在同一平面内,若它们既不汇交于一点,又 不相互平行,这样的力系称为平面任意力系。 15、平面汇交力系的合力对平面内任一点之矩等于该力系中各分力对同一点的力矩的代数和。 16、任意一个平面任意力系均可向物体内的任一点进行简化,简化结果得到○1一个主矢,它等于原力 系中各力的矢量和,作用在简化中心;○2一个主矩,它等于原力系中各力对简化中心之矩的代数和。
第三章课后习题答案 3.3和3.4 步骤: 1、建立坐标系; 2、列D -H 参数表; 3、根据 写出 ; 4、根据 写出 3.3具体计算: i )()()()(111i Z i Z i X i X i i d D R a D R T θα---=T i i 1 -T T T T T N N N 12312010...-=T N αa d θ?? ????? ?????-=100001000000111 101 θθθθc s s c T ?? ??? ?? ?????-????????????-=100 00100 0001000 0010 010000 122 122 12θθθθc s L s c T ?? ??? ???????-=1000010 00003323323 θθθθc s L s c T T T T T B w 2 3 1201=
i 3.8具体计算: 因为标定过程中{G}和{T}是重合的,所以 则: αa d θ????????????+-=1000100000021111101L L c s s c T θθθθ?? ??? ?? ?????-????????????-=100 0010000001000001001000001222212θθθθc s s c T ????????????-=100001000003333323 θθθθc s L s c T T T B G B T =T T T T S G B S W T B W =T T T T S G B S B W W T 1-=
3.13、3.15—3.21答案 ? ? ? ? ? ? ? ? ? ? ? ? = 1 2 2 l P tip tip tip P T P2 2 0=
授课章节 工业机器人运动学的数学基础 授课形式 讲授 授课时间 第 周 周 ( 月 日) 第 至 节 教学目标 知识目标:了解空间点、向量、坐标系及刚体的表示。 能力目标:能用数学模型表示空间点、向量、坐标系及刚体。 素质目标:提高自学意识 教学重点 空间点、向量、坐标系及刚体的表示 教学难点 空间点、向量、坐标系及刚体的数学模型 教 学 过 程 方法手段 时间分配 导入 为了描述机器人末端执行器位置和姿态与关节变量空间之间的关系,通常需要以数学形式来对机器人的运动进行分析研究,其中矩阵常用来表示空间点、 空间向量、坐标系平移、旋转以及变换,还可以表示 坐标系中的物体和其他运动元件。 3分钟 介绍 重点讲解及任务分析 一、 空间点的表示 如图所示,空间点P 在空间中的位置,可以用它的相对于参考坐标系的三个坐标来表示: x y z P a i b j c k =++ 二、空间向量的表示 向量可以由三个起始和终止的坐标来表示。如果一个向量起始于点A ,终止于点B ,那么它可以表示为()()()AB x x y y z z P B A i B A j B A k =-+-+-。特殊情况下,如果一个向量起始于原点(如图4-1-2所示),则有: x y z P a i b j c k =++ 42分钟(视频、PPT 、动 画)
三、坐标系的表示 一个中心位于参考坐标系原点的坐标系由三个向量表示,通常 着三个向量相互垂直。 四、刚体的表示 在外力作用下,物体的形状和大小(尺寸)保持不变,而且内部各部分相对位置保持恒定(没有形变),这种理想物理模 型称之为刚体。增加刚体的定义: 体上任意两点的连线在平动中是平行且相等的。 刚体上任意质元的位置矢量不同,相差一恒矢量,但各质元的位移、速度和加速度却相同。因此,常用“刚体的质心” 来研究刚体的平动。 一个物体在空间的表示可以这样实现:通过在它上面固连一个坐标系,再将该固连的坐标系在空间表示出来。由于这个 坐标系一直固连在该物体上,所以该物体相对于坐标系的位姿 是已知的。因此,只要这个坐标系可以在空间表示出来,那么 这个物体相对于固定坐标系的位姿也就已知了 练 习 作 业
第一单元认识机械 一、填空题 1.零件和构件的主要区别在于零件是加工制造的单元体,构件是运动的单元体。 2.机器和机构的总称为机械。机器与机构的区别是机器能完成机械功或转换机械能;而机构只能完成传递运动和力或改变运动的形式。 3.一般机器由动力部分、执行部分、传动部分、控制部分和支撑及辅助部分组成。汽车内燃机属于动力部分,车轮属于执行部分。 二、判断题 1.机器与机构都是机械,也可以认为机构就是机器。(×)2.机构就是具有相对运动的构件的组合。(√)3.零件是加工制造的单元体,构件是运动的单元体。一个构件,可以是单一的零件,也可以是由几个相互之间没有相对运动但可以拆卸的零件组合而成的刚性体。(√) 三、选择题 1.下列属于机构的是()。 A.机床B.纺织机C.千斤顶D.拖拉机2.车床上的刀架属于机器的()。 A.工作部分B.传动部分C.原动机部分D.控制部分3.机器与机构的主要区别是()。 A.机器的运动较复杂 B.机器的结构较复杂 C.机器能完成有用的机械功或实现能量转化 D.机器能变换运动形式 4.组成机器的运动单元是()。 A.机构B.构件C.部件D.零件 四、简答题 1.零件、构件、机构和机器的关系是什么? 略 I
2.请简要介绍不同机器的共同特征。 略 第二单元机械零件的设计与制造 一、填空题 1.机械零件由于某种原因不能正常工作,称为失效。在不发生失效的条件下,零件所能安全工作的限度,称为工作能力。机械零件常见的失效形式有整体断裂、过大的残余变形、零件表面的破坏以及破坏正常工作条件引起的失效。 2.机械零件的结构工艺性是指其结构制造的可行性和经济性。 3.滑动摩擦有干摩擦、边界摩擦、流体摩擦和混合摩擦四种类型。 二、判断题 1.摩擦是机器运转过程中不可避免的物理现象。零件的磨损是决定机器使用寿命的主要因素。(√)2.机械零件常用材料主要是高分子材料。(×) 三、选择题 1.机件以平稳而缓慢的速度磨损,标志摩擦条件保持恒定不变,此阶段为()阶段。 A.跑合期B.稳定磨合 C.剧烈磨合D.轻磨损 2.材料的()直接影响零件制造工艺及其质量。 A.使用性能B.工艺性能 C.经济性能D.物理性能 四、简答题 1.机械零件常见的失效形式只要有哪些? 略 2.请简述机械零件对材料的要求。 略 II
机器人技术基础试卷
考试科目:机器人技术基础考试时间:120分钟试卷总分100分 一、简答题(本大题共3小题,每小题5分,总计15分) 1 ?示教再现式机器人 答:先由人驱动操作机,再以示教动作作业,将示教作业程序、位置及其他信息存储起来,然后让机器人重现这些动作。(5分) 2 ?机器人系统结构由哪几个部分组成 答:通常由四个相互作用的部分组成:机械手、环境、任务和控制器。(5分) 3?为了将圆柱形的零件放在平板上,机器人应具有几个自由度 答:一共需要5个:定位3个,放平稳2个。(5分) 二、(10分)下面的坐标系矩阵B移动距离d=(5,2, 6)T: 0 10 2 10 0 4 B 0 0 1 6 0 0 0 1 求该坐标系相对于参考坐标系的新位置。 解:
1 0 0 5 0 1 0 2 0 1 0 2 1 0 0 4 B new 0 0 1 6 0 0 1 6 0 0 0 1 0 0 0 1 (10 分) 0 1 0 7 1 0 0 6 0 0 1 12 0 0 0 1 三、(10分)求点P=(2, 3, 4)T绕x轴旋转45度后相对于参考坐标系的坐标。 2 1 0 0 2 2 解:P Rot(x,45) 3 0 0.707 0.707 3 0.707 (10 分) 4 0 0.707 0.707 4 4.95 四、(15分)写出齐次变换矩阵A T,它表示相对固定坐标系{A}作以下变 换: (a)绕Z轴转90o;(b)再绕X轴转-90o;(c)最后做移动(3,7, 9)T。 0 1 0 3 解: A T 00 1 7 (15 分) 1 0 0 9 0 0 0 1 五、(15分)设工件相对于参考系{u}的描述为u T p ,机器人基座相对于参考系的描述为U T B,已知: 0 1 0 1 1 0 0 1 U0 0 1 2 U0 1 0 5 U T P,T B 1 0 0 0 0 0 1 9
一、填空 1、 构件是机器的 运动 单元体;零件是机器的 制造 单元体;部件是机器的 装配 单元体。 2、 平面运动副可分为 低副和高副,低副又可分为 转动副和移动副 。 3、 运动副是使两构件接触,同时又具有确定相对运动的一种联接。平面运动副可分为 低副和高副 。 3、 平面运动副的最大约束数为 _2_。 4、 机构具有确定相对运动的条件是机构的自由度数目 等于 主动件数目。 5、 平面机构中,两构件通过点、线接触而构成的运动副称为 高副。 6、 机构处于压力角a =90°时的位置,称机构的死点位置。曲柄摇杆机构,当曲柄为原动件时,机构 无 死点位置,而当摇杆为原动件 时, 机构有死点位置。 7、 铰链四杆机构的死点位置发生在从动件与连杆 共线位置。 8、 在曲柄摇杆机构中,当曲柄等速转动时,摇杆往复摆动的平均速度不同的运动特性称为: 急回特性 。 9、 摆动导杆机构的极位夹角与导杆摆角的关系为 相等。 10、 凸轮机构是由 机架、凸轮、从动件 三个基本构件组成的。 11、 为保证带传动的工作能力,一般规定小带轮的包角a 》 120 °。 12、 链传动是由 主动链轮、从动链轮 、绕链轮上链条 所组成。 13、 链传动和带传动都属于 挠性件传动。 14、 齿轮啮合时,当主动齿轮的 齿根一推动从动齿轮的 齿顶,一对轮齿开始进入啮合,所以开始啮合点应为从动轮 齿顶圆 与啮 合线的交点;当主动齿轮的 齿顶 推动从动齿轮的 齿根,两轮齿即将脱离啮合,所以终止啮合点为主动轮 齿顶圆 与啮合线的交 点。 15、 渐开线标准直齿圆柱齿轮正确啮合的条件为 模数 和 压力角 分别相等。 16、 —齿面磨损_和—因磨损导致的轮齿折断_是开式齿轮传动的主要失效形式。 17、 渐开线齿形常用的加工方法有 仿形法和范成法两类。 18、 斜齿圆柱齿轮的重合度 大于 直齿圆柱齿轮的重合度,所以斜齿轮传动平稳,承载能力 高,可用于高速重载的场合。 19、 在蜗轮齿数不变的情况下,蜗杆的头数 越少,则传动比就越大。 20、 普通圆柱蜗杆和蜗轮传动的正确啮合条件是 _ m a!=m_g 、a a1= a t2、入=[3 。 21、 轮系运动时,所有齿轮几何轴线都固定不动的,称定轴轮系轮系,至少有一个齿轮几何轴线不固定的,称 周转星轮 系 22、 轴的作用是支承轴上的旋转零件,传递运动和转矩,按轴的承载情况不同,可以分为 转轴、心轴、传动轴 。 23、 机械静联接又可以分为 可拆 联接和 不可拆 联接,其中键联接、螺纹联接、销联接属于 可拆 连接。 24、 平键的工作面是键的 两侧面。 25、 楔键的工作面是键的 上下两面 。 26、 滑动轴承中所选用的润滑油,其粘度越大,则其承载能力越 _大 27、 普通平键的剖面尺寸(b x h ),一般应根据 轴的直径 按标准选择。 28、 滚动轴承内圈与轴颈的配合采用 基孔 制,外圈与轴承孔的配合采用 基轴 制 三、选择题(将正确答案的序号填在括号中) 1、 在如图所示的齿轮一凸轮轴系中,轴 4称为(A ) A. 零件 B.机构 C.构件 D.部件 2、 平面运动副所提供的约束为(C ) A.1 B.2 C.1 或 2 D.3 3、 若两构件组成低副,则其接触形式为( A ) A.面接触 B.点或线接触 C.点或面接触 D.线或面接触 4、 机构具有确定相对运动的条件是 (A ) 5、铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,则为了获得曲柄摇杆机构,其机架应取 (B ) A.最短杆 B.最短杆的相邻杆 C.最短杆的相对杆 D.任何一杆 6、在凸轮机构的从动件选用等速运动规律时,其从动件的运动 (A ) 《机械基础》习题及答案 A.机构的自由度数目等于主动件数目 B. 机构的自由度数目大于主动件数目 C. 机构的自由度数目小于主动件数目 D. 机构的自由度数目大于等于主动件数目
第1章加工设备的选择 1-1 试说明下列机床型号的含义。 CKA6150N 第十八次重大改进 加工最大直径为500mm 落地及卧式 数控 车床 X6132 x轴工作台移动最大范围为3200mm 卧式升降台 铣床 TH6110 镗孔的最大直径为1000mm 卧式 加工中心(自动换刀) 铣镗床 Z3050 钻孔最大直径为50mm 摇臂式 钻床 1-2选择加工设备应符合什么原则? 选择加工设备,首先要保证加工零件的技术要求,能够加工出合格的零件。其次是要有利于提高生产效率,降低生产成本。还应依据加工零件的材料状态、技术要求和工艺复杂程度,选用适宜、经济的机床。 1-3选择加工设备时,机床类型确定后还应考虑哪些具体问题? (1)机床主要规格的尺寸应与工件的轮廓尺寸相适应。 (2)机床的工作精度与工序要求的加工精度相适应。 (3)机床的生产率应与加工零件的生产类型相适应。 (4)机床的功率与刚度以及机动范围应与工序的性质和最合适的切削用量相适应。 (5)装夹方便、夹具结构简单也是选择机床时需要考虑的一个因素。 (6)机床选择还应结合现场的实际情况。 第2章刀具与切削参数选择 2-1试说明外圆车削、端面车削、刨削、钻削、铣削的切削运动。 在金属切削加工时,为了切除工件上多余的材料,形成工件要求的合格表面,刀具和工件间须完成一定的相对运动,即切削运动。切削运动按其所起的作用不同,可分为主运动和进给运动,如图所示。
a)车削b)铣削c)刨削d)钻削e)磨削 1—主运动2—进给运动3—待加工表面4—加工表面5—已加工表面2-2什么是切削用量三要素? 在切削加工中切削速度、进给量和背吃刀量(切削深度)称为切削用量三要素。 2-3车刀切削部分由哪些面和刃组成? 刀具切削部分主要由刀面和切削刃两部分构成。刀面用字母A与下角标组成的符号标记,切削刃用字母S标记,副切削刃及相关的刀面标记在右上角加一撇以示区别。 (1)前面(前刀面)Ar:刀具上切屑流出的表面; (2)后面(后刀面)Aα:刀具上与工件新形成的过渡表面相对的刀面; (3)副后面(副后刀面)Aα′:刀具上与工件新形成的过渡表面相对的刀面; (4)主切削刃S:前面与后面形成的交线,在切削中承担主要的切削任务; (5)副切削刃S′:前面与副后面形成的交线,它参与部分的切削任务; (6)刀尖:主切削刃与副切削刃汇交的交点或一小段切削刃。 2-4刀具正交平面参考系平面P r、P s、P o及其刀具角度γo、αo、κr、λs如何定义?用图表示。 1.刀具角度参考平面 用于构成刀具角度的参考平面主要有:基面、切削平面、正交平面、法平面、假定工作平面和背平面。 2.正交平面参考系中的刀具标注角度 在正交平面参考系中,刀具标注角度分别标注在构成参考系的三个切削平面上。 2-5试画图表示:γo=10°、αo=6°、κr=90°、κr’=10°、λs=-5°的外圆车刀。 2-6试画图表示:γo=15°、αo=8°、κr=90°、κr’=2°、λs=0°的切断车刀。 2-7端面车削时,刀尖高(或低)于工件中心时工作角度(前、后角)有何变化? 2-8试画图说明切削过程的三个变形区及各产生何种变形? 切削过程的实际情况要比前述的情况复杂得多。在切削过程中,切削层金属要产生一系列变形,通常将其划分为三个变形区。 图中Ⅰ(AOM)为第一变形区。“剪切滑移区”,宽度为0.02 mm~0.2mm。 图中Ⅱ为第二变形区。“摩擦区”,变形方向基本上与前刀面平行。 图中Ⅲ为第三变形区。此变形区位于后刀面与已加工表面之间,切削刃钝圆部分及后刀面对已加工表面进行挤压,使已加工表面产生变形,造成纤维化和加工硬化。 2-9切屑有哪些种类?各种切屑在什么情况下形成? 由于工件材料性质和切削条件不同,切削层变形程度也不同,因而产生的切屑形态也多种多样。主要有以下四种类型:带状切屑、节状切屑、粒状切屑、崩碎切屑。 (1)带状切屑它的内表面是光滑的,外表面呈毛茸状。加工塑性金属时,在切削厚度较小、切削速度较高、刀具前角较大的工况条件下常形成此类切屑。 (2)节状切屑又称挤裂切屑。它的外表面呈锯齿形,内表面有时有裂纹。在切削速度较低、切削厚度较大、刀具前角较小时常产生此类切屑。 (3)粒状切屑又称单元切屑。在切屑形成过程中,如剪切面上的剪切应力超过了材料的断裂强度,切屑单元从被切材料上脱落,形成粒状切屑。 (4)崩碎切屑加工脆性材料,切削厚度越大越易得到这类切屑。 2-10切削变形表示方法有几种?如何表示?有何异同? 切削变形程度有三种不同的表示方法,分述如下。 1.变形系数
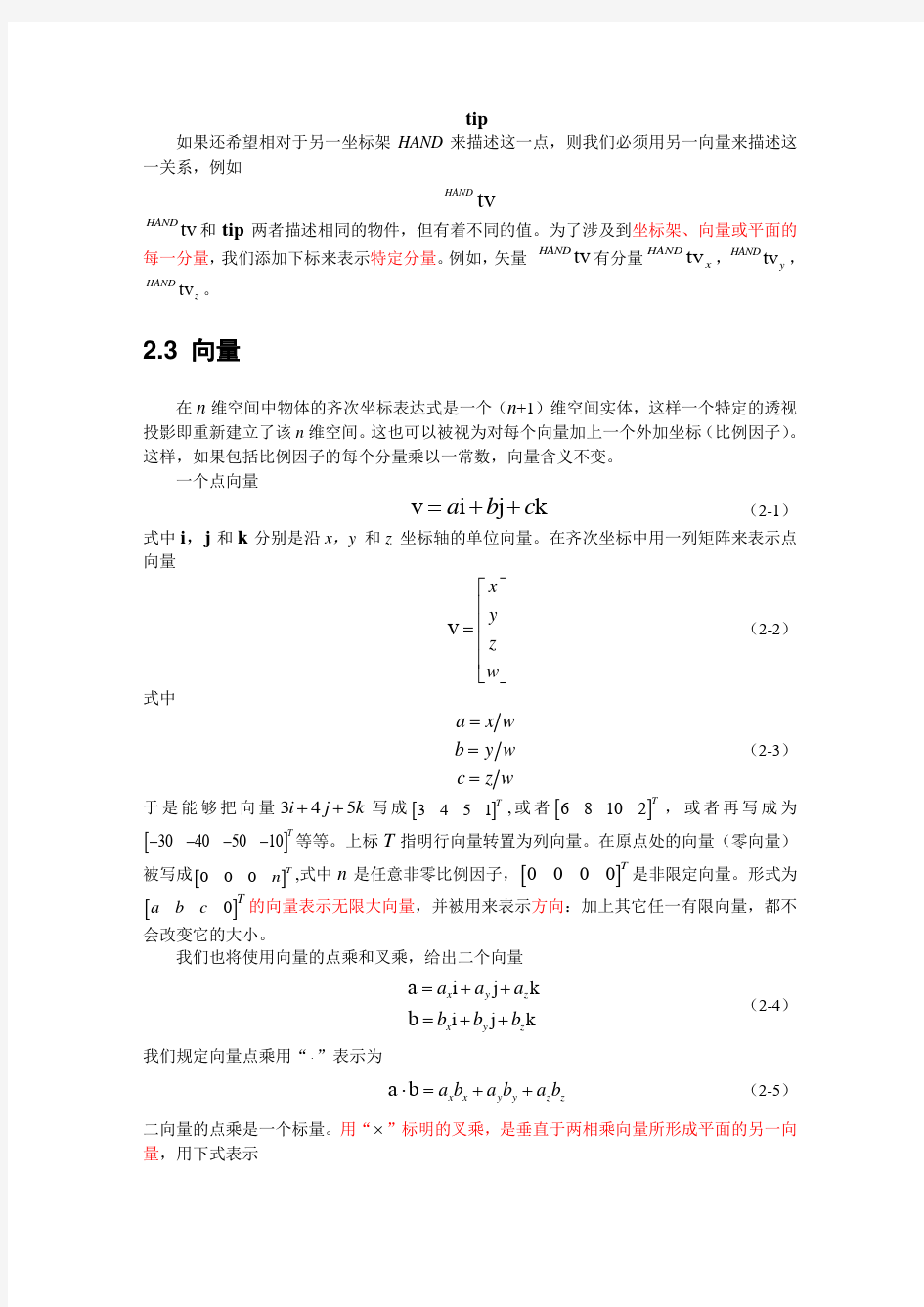
Chapter 4 Planar Kinematics Kinematics is Geometry of Motion . It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and behavior of robot mechanisms. In this chapter, we will discuss how the motion of a robot mechanism is described, how it responds to actuator movements, and how the individual actuators should be coordinated to obtain desired motion at the robot end-effecter. These are questions central to the design and control of robot mechanisms. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Planar Kinematics . Planar kinematics is much more tractable mathematically, compared to general three-dimensional kinematics. Nonetheless, most of the robot mechanisms of practical importance can be treated as planar mechanisms, or can be reduced to planar problems. General three-dimensional kinematics, on the other hand, needs special mathematical tools, which will be discussed in later chapters. 4.1 Planar Kinematics of Serial Link Mechanisms Example 4.1 Consider the three degree-of-freedom planar robot arm shown in Figure 4.1.1. The arm consists of one fixed link and three movable links that move within the plane. All the links are connected by revolute joints whose joint axes are all perpendicular to the plane of the links. There is no closed-loop kinematic chain; hence, it is a serial link mechanism. Figure 4.1.1 Three dof planar robot with three revolute joints To describe this robot arm, a few geometric parameters are needed. First, the length of each link is defined to be the distance between adjacent joint axes. Let points O, A, and B be the locations of the three joint axes, respectively, and point E be a point fixed to the end-effecter. Then the link lengths are E B B A A O ===321,,A A A . Let us assume that Actuator 1 driving