
实验七双闭环控制可逆直流脉宽调速系统(H桥)
一、实验目的
(1)了解转速、电流双闭环可逆直流PWM调速系统的组成、工作原理及各单元的工作原理。
(2)掌握双闭环可逆直流PWM调速系统的调试步骤、方法及参数的整定。
(3)测定双闭环直流调速系统的静态和动态性能指标。
二、实验所需要挂件及附件
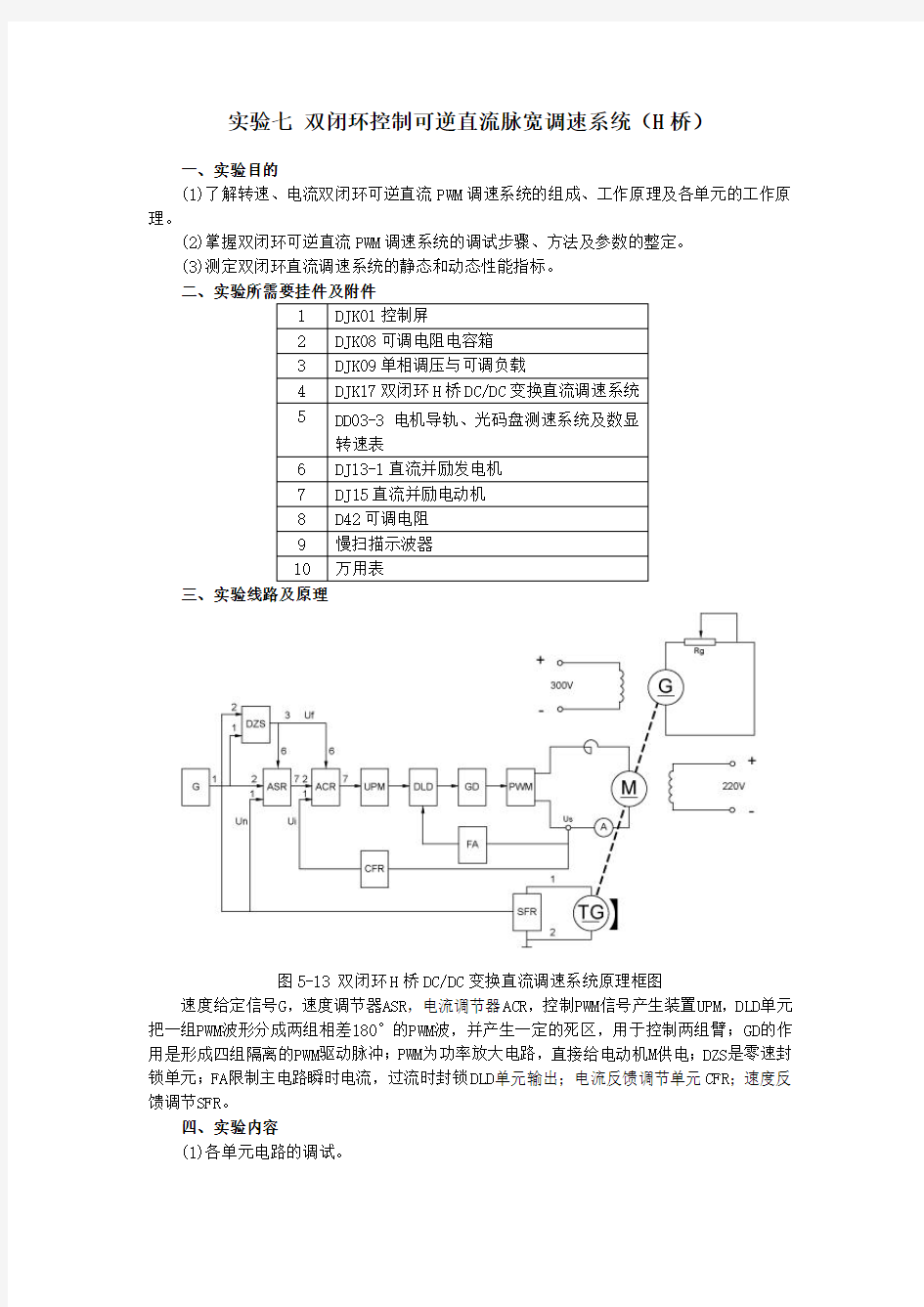
图5-13 双闭环H桥DC/DC变换直流调速系统原理框图
速度给定信号G,速度调节器ASR,电流调节器ACR,控制PWM信号产生装置UPM,DLD单元把一组PWM波形分成两组相差180°的PWM波,并产生一定的死区,用于控制两组臂;GD的作用是形成四组隔离的PWM驱动脉冲;PWM为功率放大电路,直接给电动机M供电;DZS是零速封锁单元;FA限制主电路瞬时电流,过流时封锁DLD单元输出;电流反馈调节单元CFR;速度反馈调节SFR。
四、实验内容
(1)各单元电路的调试。
(2)测定开环机械特性)400,800,1200)((rpm n rpm n rpm n I f n d ====。
(3)测定闭环的静特性)400,800,1200)((rpm n rpm n rpm n I f n d ====。 五、实验方法 (1)系统单元调试
①速度调节器(ASR)和电流调节器(ACR)的调零
把调节器的输入端1、2、3全部接地,4、5之间接50K 电阻,调节电位器RP3,使“7” 端输出绝对值小于1mv 。
②速度调节器(ASR)和电流调节器(ACR)的输出限幅值的整定 在调节器的3个输入中的其中任一个输入接给定,在4.、5之间接50K 电阻、1uF 电容,调节给定电位器,使调节器的输入为-1V ,调节电位器RP1,使调节器的输出7为+4V (输出正限幅值);同样把给定调节为+1V ,调节RP2,把负限幅值调节为-4V 。
③零速度封锁器(DZS )观测
首先把零速封锁器的输入悬空,开关S1拨至“封锁”状态,输出接速度或者电流调节器的零速封锁端6,无论调节器的输入如何调节,输出7始终为零。把面板上的给定输出接至零速封锁单元其中一路,另一路悬空,增大给定,测量零速封锁单元输出端3:给定的绝对值大于0.26V 左右时,封锁端3输出-15V ;减小给定,给定的绝对值小于0.17V 左右时,封锁端3输出+15V 。把给定加到另一路进行同样的操作。
(2)脉宽发生单元的整定和观测
把电机、直流电源等接入系统,系统接成开环,脉宽发生单元的输入悬空或者接地,调节偏移电压电位器,使电机处于停止状态(若要达到更好的闭环效果,调节偏移电压电位器,使通过电枢的直流电流低于0.02mA )用双踪示波器观测脉宽发生单元的测试点1、2和3、4的波形,此时的1、2(3、4)的占空比接近相同(占空比为50%左右)。观测同一组桥臂(1、2或者3、4)之间的死区。
(3)转速反馈调节器(SFR )、电流反馈调节器(CFR )的整定:
把电机、220V 直流电源接入系统,系统接成开环。把正给定接入脉宽发生单元,调节给定,使转速稳定在1600rpm ,调节转速反馈调节器中的RP1,使3端输出的电压为-4V 。加大负载,使电机的电枢电流稳定在1.3A ,调节电流反馈调节器,使电流反馈调节器3端输出的电压为+4V 。
(4)开环机械特性测试:
把电机、直流电源,接入系统,电动机、发电机加额定励磁。缓慢增加给定电压Ug,使电机升速,调节给定电压Ug 和负载Rg 使电动机(DJ15)的电枢电流Id=1.1A,转速达到1200rpm 。
在测试过程中逐步增大负载电阻Rg 的阻值(即减小负载)就可测出该系统的开环外特性n=f (I2),将其记入下面的表格:
然后将电机反转,增加给定Ug (负给定)使电机反向升速,调节给定电压Ug 和负载Rg 使电动机(DJ15)的电枢电流Id=1.1A,转速分别达到-1200rpm 。
在测试过程中逐步增大负载电阻Rg 的阻值(即减小负载)就可测出该系统的开环外特性n=f (I2),将其记入下面的表格:
(5)闭环系统调试及闭环静特性测定
①机械特性n=f(Id)的测定
直流电压输入为300V的情况下,发电机输出首先空载,从零开始逐渐调大给定电压Ug,使电动机转速接近1200rpm,然后在发电机的电枢绕组接入负载电阻Rg,逐渐增大电动机负载(即减小负载的电阻值),直至电动机的电枢电流Id=1.1A,即可测出系统静态特性,测定n=f(Id)并记录于下表中:
改变电机的转向,重复上述的步骤:
再降低给定电压Ug,再测试800rpm的静态特性曲线,记录于下表中:
改变电机的转向,重复上述的步骤:
②闭环控制系统n=f(Ug)的测定
调节Ug及R,使I=Ied,n=1200rpm,逐渐降低Ug,直至Ug=0V,在变换的过程中记录Ug和n,即可测出控制特性n=f(Ug)
将电机反转,I=Ied,n=1200rpm
调节Ug及R,使Id=0.5Ied,n=1200rpm,逐渐降低Ug,直至Ug=0V,在变换过程中记录Ug和n,即可测出闭环控制特性n=f(Ug)
将电机反转,Id=0.5Ied ,n=1200rpm
④动态波形观察:
给定值阶跃变化:正向启动→正向停车,反向启动→反向停车,正转直接切换到反转,反转直接切换到正转。用示波器观测)(t f n =,)(t f I d =的波形。
电动机分别稳定运行于正、负n=1200rpm ,突加、突减负载(20%N I 和100%N I )时的
)(t f n =,)(t f I d =的波形。
七、实验报告
(1)按照实验方法记录的波形描述导通臂与关断臂切断状态时的控制逻辑原则。 (2)画出上述实验中记录的各工作特性曲线n=f (zd ),并比较它们的静差率。 (3)画出闭环控制特性曲线n=f (Ug )。 八、注意事项:
(1)要注意先后顺序,通电时的先打开实验箱的电源,再加高压直流电源;断电的时候先切断高压直流电源,再关断实验箱电源。
(2)在送高压电源之前,先把给定调至最低。
(3)实验时候需要注意电机的额定电压,额定电流,额定转速,不能超过以免出现电机损坏。
题目:双闭环直流调速系统的设计与仿真 已知:直流电动机:P N=60KW,U N=220V,I N=305A,n N=1000r/min,λ=2,R a=0.08, R rec=0.1, T m=0.097s, T l=0.012s, T s=0.0017s, 电枢回路总电阻R=0.2Ω。设计要求:稳态无静差,σ ≤5%,带额定负载起动到额定转速的转速超调σn≤10%。(要求完 i 成系统各环节的原理图设计和参数计算)。 系统各环节的原理图设计和参数计算,包括主电路、调节器、电流转速反馈电路和必要的保护等,并进行必要的计算。按课程设计的格式要求撰写课程设计说明书。 设计内容与要求:1、分析双闭环系统的工作原理 2、改变调节器参数,分析对系统动态性能的影响 3、建立仿真模型
1.双闭环直流调速系统的原理及组成 对于正反转运行的调速系统,缩短起,制动过程的时间是提高生产率的重要因素。为此,在起动(或制动)过渡过程中,希望始终保持电流(电磁转矩)为允许的最大值,是调速系统以最大的加(减)速度运行。当到达稳态转速时,最好使电流立即降下来,使电磁转矩与负载转矩相平衡,从而迅速转入稳态运行。实际上,由于主电路电感的作用,电流不可能突变,为了实现在允许条件下的最快起动,关键是要获得一段使 电流保持为最大值dmI的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,采用电流负反馈应该能够得到近似的恒流过程。 为了使转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行嵌套连接,如图1所示。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器。从闭环结构上看,电流环在里面,称做内环;转速环在外面,称做外环。这就形成了转速电流负反馈直流调速系统。为了获得良好的静动态性能,转速和电流两个调节器一般采用PI调节器。 2.双闭环控制系统起动过程分析 前面已经指出,设置双闭环控制的一个重要目的就是要获得接近于理想的起动过程,因此在分析双闭环调速系统的动态性能时,有必要先探讨它的起动过程。双闭环调速系统突加给定电压*nU由静止状态起动时,转速和电流的过渡过程如图4所示。由于在起动过程中转速调节器ASR经历了不饱和、饱和、退饱和三
《运动控制》课程设计题目:转速,电流双闭环可逆直流宽频调速系统设计 系部:自动化系 专业:自动化 班级:自动化1班 学号:11423006 11423025 11423015 姓名:杨力强.丁珊珊.赵楠 指导老师:刘艳 日期:2018年5月26日-2018年6月13日
一、设计目的 应用所学的交、直流调速系统的基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行运动控制系统的初步设计。 应用计算机仿真技术,通过在MA TLAB软件上建立运动控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。 在原理设计与仿真研究的基础上,应用PROTEL进行控制系统的印制板的设计,为毕业设计的综合运用奠定坚实的基础。 二、系统设计参数 直流电动机控制系统设计参数:< 直流电动机(3> ) 输出功率为:5.5Kw 电枢额定电压220V 电枢额定电流 30A 额定励磁电流1A 额定励磁电压110V 功率因数0.85 电枢电阻0.2欧姆 电枢回路电感100mH 电机机电时间常数1S 电枢允许过载系数=1.5 额定转速 970rpm 直流电动机控制系统设计参数 环境条件: 电网额定电压:380/220V。电网电压波动:10%。 环境温度:-40~+40摄氏度。环境湿度:10~90%. 控制系统性能指标: 电流超调量小于等于5%。 空载起动到额定转速时的转速超调量小于等于30%。 调速范围D=20。 静差率小于等于0.03.
1、设计内容和数据资料 某直流电动机拖动的机械装置系统。 主电动机技术数据为: ,,,电枢回路总电阻,机电时间常数 ,电动势转速比,Ks=40,,Ts=0.0017ms,电流反馈系数,转速反馈系数,试对该系统进行初步设计。2、技术指标要求 电动机能够实现可逆运行。要求静态无静差。动态过渡过程时间,电流超调量,空载起动到额定转速时的转速超调量。 三、主电路方案和控制系统确定 主电路选用直流脉宽调速系统,控制系统选用转速、电流双闭环控制方案。主电路采用25JPF40电力二极管不可控整流,逆变器采用带续流二极管的功率开关管IGBT构成H型双极式控制可逆PWM变换器。其中属于脉宽调速系统特有的部分主要是UPM、逻辑延时环节DLD、全控型绝缘栅双极性晶体管驱动器GD和PWM变换器。系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差, 从而使系统达到调节电流和转速的目的。该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流原理图
湖南科技大学 信息与电气工程学院 《课程设计报告》 题目:转速电流双闭环的数字式可逆直流调速系统的仿真与设计 专业:电气工程及其自动化 班级: 姓名: 学号: 指导教师:
任务书 题 目 转速电流双闭环的数字式可逆直流调速系统的仿真与设计 时 间安排 2013年下学期17,18周 目 的: 应用所学的交、直流调速系统的基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行运动控制系统的初步设计。 应用计算机仿真技术,通过在MATLAB 软件上建立运动控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。 在原理设计与仿真研究的基础上,应用PROTEL 进行控制系统的印制板的设计,为毕业设计的综合运用奠定坚实的基础。 要 求:电动机能够实现可逆运行。要求静态无静差。动态过渡过程时间s T s 1.0≤,电流超调量%5%≤i σ,空载起动到额定转速时的转速超调量%30%≤n σ。 总体方案实现:主电路选用直流脉宽调速系统,控制系统选用转速、电流双闭环控制方案。主电路采用25JPF40电力二极管不可控整流,逆变器采用带续流二极管的功率开关管IGBT 构成H 型双极式控制可逆PWM 变换器。其中属于脉宽调速系统特有的部分主要是UPM 、逻辑延时环节DLD 、全控型绝缘栅双极性晶体管驱动器GD 和PWM 变换器。系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差。 从而使系统达到调节电流和转速的目的。该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。 指导教师评语: 评分等级:( ) 指导教师签名:
摘要 本次课程设计直流电机可逆调速系统利用的是双闭环调速系统,因其具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动系统中得到了广泛的应用。直流双闭环调速系统中设置了两个调节器, 即转速调节器(ASR)和电流调节器(ACR), 分别调节转速和电流。本文对直流双闭环调速系统的设计进行了分析,对直流双闭环调速系统的原理进行了一些说明,介绍了其主电路、检测电路的设计,介绍了电流调节器和转速调节器的设计以及系统中一些参数的计算。 关键词:双闭环,可逆调速,参数计算,调速器。
目录 1. 设计概述 (1) 1.1 设计意义及要求 (1) 1.2 方案分析 (1) 1.2.1 可逆调速方案 (1) 1.2.2 控制方案的选择 (2) 2.系统组成及原理 (4) 3.1设计主电路图 (7) 3.2系统主电路设计 (8) 3.3 保护电路设计 (8) 3.3.1 过电压保护设计 (8) 3.3.2 过电流保护设计 (9) 3.4 转速、电流调节器的设计 (9) 3.4.1电流调节器 (10) 3.4.2 转速调节器 (10) 3.5 检测电路设计 (11) 3.5.1 电流检测电路 (11) 3.5.2 转速检测电路 (11) 3.6 触发电路设计 (12) 4. 主要参数计算 (14) 4.1 变压器参数计算 (14) 4.2 电抗器参数计算 (14) 4.3 晶闸管参数 (14) 5设计心得 (15) 6参考文献 (16)
直流电动机可逆调速系统设计 1.设计概述 1.1设计意义及要求 直流电动机具有良好的起、制动性能,宜于在大范围内实现平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。从控制的角度来看,直流拖动控制系统又是交流拖动控制系统的基础,所以应该首先掌握直流拖动控制系统。本次设计最终的要求是能够是电机工作在电动和制动状态,并且能够对电机进行调速,通过一定的设计,对整个电路的各个器件参数进行一定的计算,由此得到各个器件的性质特性。 1.2 方案分析 1.2.1 可逆调速方案 使电机能够四象限运行的方法有很多,可以改变直流电机电枢两端电压的方向,可以改变直流电机励磁电流的方向等等,即电枢电压反接法和电枢励磁反接法。 电枢励磁反接方法需要的晶闸管功率小,适用于被控电机容量很小的情况,励磁电路中需要串接很大的电感,调速时,电机响应速度较慢,且需要设计很复杂的电路,故在设计中不采用这种方式。 电枢电压反接法可以应用在电机容量很的情况下,且控制电路相对简单,电枢反接反向过程很快,在实际应用中常常采用,本设计中采用该方法。 电枢电压反接电路可以采用两组晶闸管反并联的方式,两组晶闸管分别由不同的驱动电路驱动,可以做到互不干扰。 图1-1 两组晶闸管反并联示意图
转速、电流双闭环调速系统 班级:铁道自动化091 姓名:陈涛 指导老师:严俊 完成日期:2011-10-31 湖南铁道职业技术学院
目录 摘要 (3) 一、直流调速介绍 (4) 1、调速定义 (4) 2、调速方法 (4) 3、调速指标 (4) 二、双闭环直流调速系统介绍 (5) 1、转速、电流双闭环调速系统概述 (5) 2、转速、电流双闭环调速系统的组成 (6) 3、PI调节器的稳态特征 (7) 4、起动过程分析 (8) 5、动态性能 (11) 6、两个调节器的作用 (11) 三、总结 (12)
摘要 随着近代电力电子技术和计算机的发展以及现代控制理论的应用,自动化电力拖动正向着计算机控制的生产过程自动化的方向迈进,以达到高速、优质、高效率地生产。在大多数综合自动化系统中,自动化的电力拖动系统仍然是不可缺少的组成部分。 本文讲述的是转速、电流双闭环直流调速系统,通过学习使我对转速、电流双闭环直流调速系统的组成、调速器的稳态特性和作用以及系统的动态特性有了一定的了解。该系统是在单闭环系统的基础上加以改进后完成的,通过对电力拖动自动控制系统的学习,我们里了解到转速、电流双闭环直流调速系统相对于单闭环调速系统的一些优势,它是通过转速反馈和电流反馈两个环节分别起作用的。 通过这次的学习,我懂得了很多,具有了通过运用理论上所掌握的知识来独立发现问题、思考问题、解决问题的能力,在这次的论文中,我有一次重新学习了转速、电流双闭环直流调速系统,使我这一系统有了更进一步的了解。
转速、电流双闭环调速系统 一、直流调速介绍 1、调速定义 调速是指在某一具体负载情况下,通过改变电动据或电源参数的方法,使机械特性曲线得以改变,从而使电动机转速发生变化或保持不变。 2、调速方法 1.调节电枢供电电压U。改变电枢电压主要是从额定电压往下降低电枢电压,从电动机额定转速向下变速,属恒转矩调速方法。对于要求在一定范围内无 级平滑调速的系统来说,这种方法最好。变化遇到的时间常数较小,能快速响应,但是需要大容量可调直流电源。 2.改变电动机主磁通。改变磁通可以实现无级平滑调速,但只能减弱磁通进行调速(简称弱磁调速),从电机额定转速向上调速,属恒功率调速方 法。变化时间遇到的时间常数同变化遇到的相比要大得多,响应速度较慢,但所需电源容量小。 3.改变电枢回路电阻 <。在电动机电枢回路外串电阻进行调速的方法,设备简单,操作方便。但是只能进行有级调速,调速平滑性差,机械特性较软;空载时几乎没什么调速作用;还会在调速电阻上消耗大量电能。 3、调速指标 1.调速范围(包括:恒转矩调速范围/恒功率调速范围),
基础课程设计(论文) 直流PWM-M可逆调速系统的设计与仿真 专业:电气工程及其自动化 指导教师:刘雨楠 小组成员:陈慧婷(20114073166) 石文强(20114073113) 刘志鹏(20114073134) 张华国(20114073151) 信息技术学院电气工程系 2014年10月20日
摘要 当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,而直流调速控制作为电气传动的主流在现代化生产中起着主要作用。本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。长期以来,直流电动机因其具有调节转速比较灵活、方法简单、易于大范围内平滑调速、控制性能好等特点,一直在传动领域占有统治地位。微机技术的快速发展,在控制领域得到广泛应用。本文对基于微机控制的双闭环可逆直流PWM调速系统进行了较深入的研究,从直流调速系统原理出发,逐步建立了双闭环直流PWM调速系统的数学模型,用微机硬件和软件发展的最新成果,探讨一个将微机和电力拖动控制相结合的新的控制方法,研究工作在对控制对象全面回顾的基础上,重点对控制部分展开研究,它包括对实现控制所需要的硬件和软件的探讨,控制策略和控制算法的探讨等内容。在硬件方面充分利用微机外设接口丰富,运算速度快的特点,采取软件和硬件相结合的措施,实现对转速、电流双闭环调速系统的控制。论文分析了系统工作原理和提高调速性能的方法,研究了IGBT模块应用中驱动、吸收、保护控制等关键技术.在微机控制方面,讨论了数字触发、数字测速、数字PWM调制器、双极式H型PWM变换电路、转速与电流控制器的原理,并给出了软、硬件实现方案。 关键词:直流可逆调速数字触发PWM 数字控制器
目录 1α= β配合控制的直流可逆调速系统的工作原理 2 α =β配合控制的有环流直流可逆调速 系统的仿真模型及参数 3 仿真结果及分析 4 心得体会 5 参考文献
摘要: 针对面向系统传递函数结构图仿真方法的不足,提出了一种基于MATLAB的Simulink和 Power System工具箱、面向系统电气原理结构图的仿真新方法,实现了转速与电流双闭环α= β 配合控制的直流可逆调速系统的建模与仿真。分别介绍了同步脉冲触发器、移相器控制器和PI调节器的建模,给出了直流可逆调速系统的仿真模型和仿真结果,仿真结果表明了仿真算法可信度较高。 关键词: α= β 配合控制;直流电机;MATLAB仿真;移项控制器 Abstract: Anovelmethod ofconstruction& simulation was put forward forthe modelofα =βmoderating controlDC SR system basedon Matlab Simulink &Power SystemBlockset,beca use it was shortagefor facing system transferfunction construction drawingto simulate.Themodel of synchronized6-pulsegenerator, shifter and PI controller were introduced, andthe simulationresults&models for theα= βmoderating cont rol DC SRsystem were provided. Simulation results show that simulation methodis correct withhighcredibility. Key words:α =β moderating control; DC motor; MATLAB simulation;shifter 引言 晶闸管反并联的电枢可逆线路是可逆调速系统的典型线路之一。这种线路有能实现可逆运行、回馈制动等优点,同时正转制动和反转启动完全衔接起来,没有间断或死区,这是有环流调速系统的优点,特别是用于要求快速正反转的中小容量的系统。为保证系统安全,必须增加环流电抗器以消除其中的环流[1-2]。本文采用MATLAB的Simulink和PowerS ystem工具箱,介绍如何实现α=β配合控制的直流可逆调速系统的建模与仿真。 α= β配合控制的直流可逆调速系统的建模 控制系统传统的计算机仿真是用传递函数方法来完成的,各环节的传递函数是将实际模型经过一定的简化而得到的,很多重要细节会被忽略[3]。PowerSystem 工具箱提供了利用物理模型仿真的可能,其仿真建模方法与构建实际电路相似,仿真结果非常接近于实际。 1 α =β 配合控制的直流可逆调速系统的工作原理 α=β配合控制的有环流直流可逆调速系统的电气原理图如图1所示。图中,主电路由两组三相桥式晶闸管全控型整流器反并联组成,并共用同一路三相电惊。由于采用α= 卢配合控制方式,在两组整流器之间没有直流环流,但还存在脉动环流,为了限制脉动环流的大小,在主电路中串入了四个均衡电抗器Lc1-Lc4,用于限制脉动环流。平波电抗器L d 用于减小电动机电枢电流的脉动,减小电枢电流的断续区,改善电动机的机械特性。系统的控制部分采用F 转速和电流的双闭环控制。由于可逆调速电流的反馈信号不仅要反映电枢电流的大小还需要反映电枢电流的方向,因此电流反馈一般用直流电流互感器或霍尔电流检测器,在电枢端取电流信号。为了确保两组整流器的工作状态相反,电流调节器的输出分两路,一路经正组桥触发器GTF 控制正组桥 整流器,另一路经倒相器AR 、反组桥触发器GTR 控制反组桥整流器。
一、摘要: 直流电机由于具有速度控制容易,启、制动性能良好,且在宽范围内平滑调速等特点而在冶金、机械制造、轻工业等工业部门中得到广泛应用。直流时机转速的控制方法可以分为两类,即励磁控制法与电枢电压控制法。本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。长期以来,直流电动机因其具有调节转速比较灵活、方法简单等特点,一直在传动领域占有统治地位。 本文对双闭环可逆直流PWM调速系统进行了较深入的研究,从直流调整系统原理出发,逐步建立了闭环直流PWM调整系统的模型。 二、双闭环可逆直流脉宽PWM调速系统设计 1.设计分析 双闭环调整系统的传动系统结构图: 直流PWM控制系统是直流脉宽调制式调速控制系统的简称,与晶闸管直流调速系统的区别在于用直流PWM变换器取代了晶闸管变流装置,作为系统的功率驱动器,系统构成原理图如下所示: 直流PWM传动系统结构图 其中属于脉宽调制调速系统主要由调制波发生器GM、脉宽调制器UPM、逻辑延时环节DLD 和电力晶体管基极的驱动器GD和脉宽调制(PWM)变换器组成。最关键的部件为脉宽调制器。模拟式脉宽调制器本质为电压-脉冲变换装置,它是由一个运算放大器和几个输入信号构成电压比较器。去处放大器工作在开环状态,在电流调节器的输出控制信号Uс的控制下,产生一个等幅、宽度受Uс控制的方波脉冲序列,为PWM变频器提供所需的脉冲信号。脉宽调制器按所加输入端调制信号不同,可分为锯齿波脉宽、三角波脉宽调制器。目前就用较多脉宽调制信号由数字方法来产生,如专用集成PWM控制电路及单片微机所构成的脉宽调制器。
双闭环调速系统的结构图 直流双闭环调速系统的结构图如图1所示,转速调节器与电流调节器串极联结,转速调节器的输出作为电流调节器的输入,再用电流调节器的输出去控制PWM 装置。其中脉宽调制变换器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,从而可以改变平均输出电压的大小,以调节电机转速,达到设计要求。 双闭环调速系统的结构图 调速系统起动过程的电流和转速波形 如图2所示,这时,启动电流成方波形,而转速是线性增长的。这是在最大电流(转矩)受限的条件下调速系统所能得到的最快的起动过程。 (a)带电流截止负反馈的单闭环调速系统起动过程 (b)理想快速起动过程 图2 调速系统起动过程的电流和转速波形 H 桥式可逆PWM 变换器的工作原理: PWM 控制的示意图如图3所示:可控开关S 以一定的时间间隔重复地接通和断开,当S 接通时,供电电源Us 通过开关S 施加到电动机两端,电源向电机提供能量,电动机储能:当开关S 断开时,中断了供电电源Us 向电动机电流继续流通。 I dL n t I d O I dm I dL n t I d O I dm I dcr n n (a) (b)
CDIO课程项目研究报告 项目名称:H桥可逆直流调速系统设计与实验 姓名; 指导老师: 日期:
摘要 本设计的题目是基于SG3525的双闭环直流电机调速系统的设计。SG3525是电流控制型PWM控制器,所谓电流控制型脉宽调制器是按照接反馈电流来调节脉宽的。在脉宽比较器的输入端直接用流过输出电感线圈的信号与误差放大器输出信号进行比较,从而调节占空比使输出的电感峰值电流跟随误差电压变化而变化。由于结构上有电压环和电流环系统,因此,无论开关电源的电压调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型控制器。如果对系统的动态性能要求较高,则单闭环系统就难以满足需要。而转速、电流双闭环直流调节系统采用PI调节器可以获得无静差;构成的滞后校正,可以保证稳态精度;虽快速性的限制来换取系统稳定的,但是电路较简单。所以双闭环直流调速是性能很好、应用最广的直流调速系统。本设计选用了转速、电流双闭环调速控制电路,本课题内容重点包括调速控制器的原理,并且根据原理对转速调节器和电流调节器进行了详细地设计。概括了整个电路的动静态性能,最后将整个控制器的电路图设计完成,并且进行仿真。 关键词:双闭环直流可逆调速系统、H桥驱动电路、SG3525信号产生电路、PI调节器、MATLAB仿真
前言 随着交流调速的迅速发展,交流调速技术越趋成熟,但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。采用转速负反馈和PI调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。但如果对系统的动态性能要求较高,如要求快速起制动、突加负载动态速降时,单闭环系统就难以满足。这主要是因为在单闭环系统中不能完全按照需要来控制动态过程中的电流或转矩。在单闭环系统中,只有电流截至负反馈环节是专门用来控制电流的,但它只是在超过临界电流值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。实际工作中,在电机最大电流受限的条件下,充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流转矩为允许最大值,使电力拖动系统尽可能用最大的加速度启动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。实际上,由于主电路电感的作用,电流不能突跳,为了实现在允许条件下最快启动,关键是要获得一段使电流保持为最大值的恒流过程,按照反馈控制规律,电流负反馈就能得到近似的恒流过程。问题是希望在启动过程中只有电流负反馈,而不能让它和转速负反馈同时加到一个调节器的输入端,到达稳态转速后,又希望只要转速负反馈,不要电流负反馈发挥主作用,因此需采用双闭环直流调速系统。这样就能做到既存在转速和电流两种负反馈作用又能使它们作用在不同的阶段。 项目预期成果: 设计一个双闭环可逆直流无静差调速系统,其稳态性能指标实现要求如下:电流超调量S≤5%调速范围 D=20;其动态性能指标:转速超调量δn=10%;调整时间时间ts=2s;电流超调量δi≤5% 。
燕山大学 CDIO课程项目研究报告 项目名称: H桥可逆直流调速系统设计与实验 学院(系):电气工程学院 年级专业: 学号: 学生: 指导教师: 日期: 2014年6月3日
目录 前言 (1) 摘要 (2) 第一章调速系统总体方案设计 (3) 1.1 转速、电流双闭环调速系统的组成 (3) 1.2.稳态结构图和静特 (4) 1.2.1各变量的稳态工作点和稳态参数计算 (6) 1.3双闭环脉宽调速系统的动态性能 (7) 1.3.1动态数学模型 (7) 1.3.2起动过程分析 (7) 1.3.3 动态性能和两个调节器的作用 (8) 第二章 H桥可逆直流调速电源及保护系统设计 (11) 第三章调节器的选型及参数设计 (13) 3.1电流环的设计 (13) 3.2速度环的设计 (15) 第四章Matlab/Simulink仿真 (17) 第五章实物制作 (20) 第六章性能测试 (22) 6.1 SG3525性能测试 (22) 6.2 开环系统调试 (23) 总结 (26) 参考文献 (26)
前言 随着交流调速的迅速发展,交流调速技术越趋成熟,以及交流电动机的经济性和易维护性,使交流调速广泛受到用户的欢迎。但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。采用转速负反馈和PI调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。但如果对系统的动态性能要求较高,如要求快速起制动、突加负载动态速降时,单闭环系统就难以满足。这主要是因为在单闭环系统中不能完全按照需要来控制动态过程中的电流或转矩。在单闭环系统中,只有电流截至负反馈环节是专门用来控制电流的,但它只是在超过临界电流值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。实际工作中,在电机最大电流受限的条件下,充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流转矩为允许最大值,使电力拖动系统尽可能用最大的加速度启动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。实际上,由于主电路电感的作用,电流不能突跳,为了实现在允许条件下最快启动,关键是要获得一段使电流保持为最大值的恒流过程,按照反馈控制规律,电流负反馈就能得到近似的恒流过程。问题是希望在启动过程中只有电流负反馈,而不能让它和转速负反馈同时加到一个调节器的输入端,到达稳态转速后,又希望只要转速负反馈,不要电流负反馈发挥主作用,因此需采用双闭环直流调速系统。这样就能做到既存在转速和电流两种负反馈作用又能使它们作用在不同的阶段。 项目预期成果: 设计一个双闭环可逆直流调速系统,实现电流超调量小于等于5%;转速超调量小于等于5%;过渡过程时间小于等于0.1s的无静差调速系统。 项目分工:参数计算: 仿真: 电路设计: 电路焊接: PPT答辩: 摘要
双闭环可逆直流脉宽调速系统 一.实验目的 1.掌握双闭环可逆直流脉宽调速系统的组成、原理及各主要单元部件的工作原理。 2.熟悉直流PWM专用集成电路SG3525的组成、功能与工作原理。 3.熟悉H型PWM变换器的各种控制方式的原理与特点。 4.掌握双闭环可逆直流脉宽调速系统的调试步骤、方法及参数的整定。 二.实验内容 1.PWM控制器SG3525性能测试。 2.控制单元调试。 3.系统开环调试。 4.系统闭环调试 5.系统稳态、动态特性测试。 6.H型PWM变换器不同控制方式时的性能测试。 三.实验系统的组成和工作原理 图1—1 双闭环脉宽调速系统的原理图 在中小容量的直流传动系统中,采用自关断器件的脉宽调速系统比相控系统具有更多的优越性,因而日益得到广泛应用。 双闭环脉宽调速系统的原理框图如图6—10所示。图中可逆PWM变换器主电路系采用IGBT所构成的H型结构形式,UPW为脉宽调制器,DLD为逻辑延时环节, FA为瞬时动作的过流保护。 脉宽调制器UPW采用美国硅通用公司(Silicon General)的第二代产品SG3525,这是一种性能优良,功能全、通用性强的单片集成PWM控制器。由于它简单、可靠及使用方便
灵活,大大简化了脉宽调制器的设计及调试,故获得广泛使用。 四.实验设备及仪器 1.NMCL系列教学实验台主控制屏。 2.NMCL—18组件 3.NMCL—31A组件 4.NMCL-22挂箱 6.M MEL—13组件。 7.直流电动机M03。 8.双踪示波器。 五.注意事项 1.直流电动机工作前,必须先加上直流激磁。 2.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)。 3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。 4.系统开环连接时,不允许突加给定信号U g起动电机。 5.起动电机时,需把MMEL-13的测功机加载旋钮逆时针旋到底,以免带负载起动。 6.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。 7.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。 8.实验时需要特别注意起动限流电路的继电器有否吸合,如该继电器未吸合,进行过流保护电路调试或进行加负载试验时,就会烧坏起动限流电阻。 9.系统整定要求满足超调量小于5%,调节时间小于3秒。 六.实验方法 1.SG3525及控制电路性能测试 (1)调节UPW单元的RP电位器使输出波形的占空比为二分之一,UPW的2端与DLD 单元的1相连,按下S1开关,检查G1E1,,G2E2,G3E3,G4E2之间的波形是否正常2.开环系统调试 按图5-19接线。断开主电源,将三相调压器的U、V、W接主电路的相应处,,将主电路的1、3端相连, 6、7端接入直流电动机M03的电枢及700mH的电感,电枢回路要串入NMCL—31A 上的指针式电流表。电机加上励磁。 22挂箱的地与G(给定)的地相连,G(给定)的输出接到UPW的3端。
双闭环直流调速系统设计 内容摘要 电机自动控制系统广泛应用于各行业,尤其是工业。这些行业中绝大部分生产机械都采用电动机作原动机。有效地控制电.直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。有效地控制电机,提高其运行性能,具有很好的现实意义。本文介绍了基于工程设计对直流调速系统的设计,根据直流调速双闭环控制系统的工作原理以及介绍变频调速技术的发展概况,变频调速技术的发展趋势关键词:双闭环控制系统,转速控制环,系统现状,发展趋势 英文翻译:Electrical automatic control system widely used in various industries, especially in industry. Most of the production machinery used in these industries motor as a prime mover. Effectively control electricity. Dc motor has a good start, braking performance, adaptable to smooth speed regulation in large scale, in many need to speed or fast forward and reverse has been widely used in the area of electric drive. Effectively control motor, improve its operation performance, has the very good practical significance. I ntroduced in this paper, based on the engineering design to the design of dc speed regulating system, the working principle of the double closed loop control system of dc speed regulating and also I ntroduce the development general situation and the development trend Key words: double closed loop control system, speed control loop, th e status quo,the development of trend 一:引言 矿井提升机是煤矿、有色金属矿中的重要运输设备,是“四大运转设备”之一。矿井提升系统具有环节多、控制复杂、运行速度快、惯性质量大、运行特性复杂的特点,且工作状况经常交替转换。 近几年,交流调速飞速发展,逐渐有赶超并代替直流调速的趋势。直流调速理论基础是经典控制理论,而交流调速主要依靠现代控制理论。不过最近研制成功的直流调速器,具有和交流变频器同等性能的高精度、高稳定性、高可靠性、
; 课程设计任务书 学生姓名:苌城专业班级:自动化0706 指导教师:饶浩彬工作单位:自动化学院 题目: 逻辑无环流直流可逆调速系统设计 初始条件: 1.技术数据: 晶闸管整流装置:R rec=Ω,K s=40。 / 负载电机额定数据:P N=,U N=230V,I N=37A,n N=1450r/min,R a=Ω,I fn=1.14A, GD2= 系统主电路:T m=,T l= 2.技术指标 稳态指标:无静差(静差率s≤2, 调速范围D≥10) 动态指标:电流超调量:≤5%,起动到额定转速时的超调量:≤8%,(按退饱和方式计算) 要求完成的主要任务: ? 1.技术要求: (1) 该调速系统能进行平滑的速度调节,负载电机可逆运行,具有较宽的调速范围(D≥10),系统在工作范围内能稳定工作 (2) 系统静特性良好,无静差(静差率s≤2) (3) 动态性能指标:转速超调量δn<8%,电流超调量δi<5%,动态速降Δn≤10%,调速系统的过渡过程时间(调节时间)t s≤1s (4) 系统在5%负载以上变化的运行范围内电流连续 (5) 调速系统中设置有过电压、过电流等保护,并且有制动措施
2.设计内容: ! (1) 根据题目的技术要求,分析论证并确定主电路的结构型式和闭环调速系统的组成,画出系统组成的原理框图 (2) 调速系统主电路元部件的确定及其参数计算(包括有变压器、电力电子器件、平波电抗器与保护电路等) (3) 动态设计计算:根据技术要求,对系统进行动态校正,确定ASR调节器与ACR调节器的结构型式及进行参数计算,使调速系统工作稳定,并满足动态性能指标的要求 (4) 绘制逻辑无环流直流可逆调速系统的电气原理总图(要求计算机绘图) (5) 整理设计数据资料,课程设计总结,撰写设计计算说明书 时间安排: 课程设计时间为一周半,共分为三个阶段: (1): (2)复习有关知识,查阅有关资料,确定设计方案。约占总时间的20% (3)根据技术指标及技术要求,完成设计计算。约占总时间的40% (4)完成设计和文档整理。约占总时间的40% 指导教师签名:年月日 系主任(或责任教师)签名:年月日 】
直流PWM-M可逆调速系统的设计与仿真 摘要 当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,而直流调速控制作为电气传动的主流在现代化生产中起着主要作用。本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。长期以来,直流电动机因其具有调节转速比较灵活、方法简单、易于大范围内平滑调速、控制性能好等特点,一直在传动领域占有统治地位。 微机技术的快速发展,在控制领域得到广泛应用。本文对基于微机控制的双闭环可逆直流PWM 调速系统进行了较深入的研究,从直流调速系统原理出发,逐步建立了双闭环直流PWM调速系统的数学模型,用微机硬件和软件发展的最新成果,探讨一个将微机和电力拖动控制相结合的新的控制方法,研究工作在对控制对象全面回顾的基础上,重点对控制部分展开研究,它包括对实现控制所需要的硬件和软件的探讨,控制策略和控制算法的探讨等内容。在硬件方面充分利用微机外设接口丰富,运算速度快的特点,采取软件和硬件相结合的措施,实现对转速、电流双闭环调速系统的控制。 论文分析了系统工作原理和提高调速性能的方法,研究了IGBT模块应用中驱动、吸收、保护控制等关键技术.在微机控制方面,讨论了数字触发、数字测速、数字PWM调制器、双极式H型PWM变换电路、转速与电流控制器的原理,并给出了软、硬件实现方案。 关键词:PWM调速、直流电动机、双闭环调速
目录 前言 (1) 第1章直流PWM-M调速系统 (2) 第2章UPE环节的电路波形分析 (4) 第3章电流调节器的设计 (6) 3.1 电流环结构框图的化简 (6) 3.2 电流调节器参数计算 (7) 3.3 参数校验 (8) 3.3.1 检查对电源电压的抗扰性能: (8) 3.3.2 晶闸管整流装置传递函数的近似条件 (9) 3.3.3 忽略反电动势变化对电流环动态影响的条件 (9) 3.3.4 电流环小时间常数近似处理条件 (9) 3.4 计算调节器电阻和电容 (9) 第4章转速调节器的设计 (11) 4.1 电流环的等效闭环传递函数 (11) 4.2 转速环结构的化简和转速调节器结构的选择 (11) 4.3 转速调节器的参数的计算 (14) 4.4 参数校验 (14) 4.4.1 电流环传递函数化简条件 (15) 4.4.2 转速环小时间常数近似处理条件 (15) 4.5 计算调节器电阻和电容 (15) 4.6 调速范围静差率的计算 (16) 第5章系统仿真 (17) 5.1 仿真软件Simulink介绍 (17) 5.2 Simulink仿真步骤 (17) 5.3 双闭环仿真模型 (17) 5.4 双闭环系统仿真波形图 (18) 结论 (19) 参考文献 (20)
双闭环可逆直流脉宽PWM调速系统设计 及MATLAB仿真
目录 目录 (1) 中英文摘要 (2) 摘要 (2) Abstract (2) 正文 (3) 双闭环可逆直流脉宽PWM调速系统设计 (3) 设计分析 (3) 主电路设计 (9) 电流调节器参数计算 (11) 信号产生电路 (13) GTR驱动电路原理 (14) 辅助回路设计 (15) 转速给定电路设计 (16) 转速检测设计 (16) MATLAB仿真设计 (17) 双闭环调速系统仿真框图 (17) 仿真结果 (18) 结果分析 (22) 总结 (23) 参考文献 (24)
中英文摘要 摘要 直流电机由于具有速度控制容易,启、制动性能良好,且在宽范围内平滑调速等特点而在冶金、机械制造、轻工业等工业部门中得到广泛应用。直流时机转速的控制方法可以分为两类,即励磁控制法与电枢电压控制法。本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。长期以来,直流电动机因其具有调节转速比较灵活、方法简单等特点,一直在传动领域占有统治地位。 本文对双闭环可逆直流PWM调速系统进行了较深入的研究,从直流调整系统原理出发,逐步建立了闭环直流PWM调整系统的模型。 Abstract With dc motor speed control is easy, rev, braking performance is good, smooth and in wide range speed adjustment characteristics in metallurgy, machinery manufacturing, light industry, etc. Is widely used
直流双闭环调速系统设计 1设计任务说明书 某晶闸管供电的转速电流双闭环直流调速系统,整流装置采用三相桥式电路,基本数据为: 直流电动机:V U N 750=,A I N 780=,min 375r n N =,04.0=a R ,电枢电路 总电阻R=0.1Ω,电枢电路总电感mH L 0.3=,电流允许过载倍数5.1=λ,折算到电动机轴的飞轮惯量2 2 4.11094Nm GD =。 晶闸管整流装置放大倍数75=s K ,滞后时间常数s T s 0017.0= 电流反馈系数?? ? ??≈=N I V A V 5.11201.0β 电压反馈系数?? ? ??=N n V r V 12min 032.0α 滤波时间常数.02.0,002.0s T s T on oi == V U U U cm im nm 12===* *;调节器输入电阻Ω=K R O 40。 设计要求: 稳态指标:无静差 动态指标:电流超调量005≤i σ;空载起动到额定转速时的转速超调量 0010≤n σ。
目录 1设计任务与分析? 2调速系统总体设计...................................................................................................................................... 3直流双闭环调速系统电路设计? 3.1晶闸管-电动机主电路的设计........................................................ 3.1.1主电路设计? 3.1.2主电路参数计算................................................................. 3.2转速、电流调节器的设计? 3.2.1电流调节器.................................................................. 3.2.1.1电流调节器设计? 3.2.1.2电流调节器参数选择........................................................ 3.2.2转速调节器.................................................................... 3.2.2.1转速调节器设计.............................................................. 3.2.2.2转速调节器参数选择.......................................................... 4计算机仿真.................................................................................................................................................. 4.1空载起动? 4.2突加负载........................................................................................................................................ 4.3突减负载 5设计小结与体会? 6参考文献.....................................................................................................................................................