项目实训报告
目录
1.1 项目概述 (1)
1.2 设计要求 (1)
1.3 系统设计 (1)
1.3.1 设计方案 (2)
1.3.2 知识点 (2)
1.4 硬件模块介绍 (2)
1.4.1 STC89C52RC单片机 (2)
1.4.2 电机驱动L293D (3)
1.4.3 寻迹模块 (4)
1.4.4 避障模块 (5)
1.4.5 电源模块 (5)
1.5 机械系统设计 (5)
1.6 硬件设计 (5)
1.6.1 小车工作原理 (5)
1.6.2 电路框图设计 (5)
1.6.3 知识点 (6)
1.6.4 元件清单 (6)
1.6.5 信号检测模块设计 (7)
1.7 软件设计 (9)
1.7.1寻迹避障程序 (9)
1.7.2 红外遥控程序 (15)
1.8 系统调试 (17)
心得体会 (17)
参考文献 (18)
1.1 项目概述
自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。
随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是一种实用有效的方法。
机器人要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当给机器人一个视觉功能。避障控制系统是基于自动导引小车(AVG—auto-guide vehicle)系统,基于它的智能小车实现自动识别路线,判断并自动避开障碍,选择正确的行进路线。使用传感器感知路线和障碍并作出判断和相应的执行动作。
现智能小车发展很快,从智能玩具到其它各行业都有实质成果。其基本可实现循迹、避障、检测贴片、寻光入库、避崖等基本功能,这几节的电子设计大赛智能小车又在向声控系统发展。比较出名的飞思卡尔智能小车更是走在前列。我们小组此次的设计主要实现循迹、避障、无线遥控这三个功能。
该智能小车可以作为机器人的典型代表。它可以分为三大组成部分:传感器检测部分、执行部分、CPU。机器人要实现自动避障、循迹、无线遥控等功能,感知导引线和障碍物。可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。基于上述要求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗略感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器来充当。智能小车的执行部分,是由直流电机来充当的,主要控制小车的行进方向和速度。单片机驱动直流电机一般有两种方案:第一,勿需占用单片机资源,直接选择有PWM功能的单片机,这样可以实现精确调速;第二,可以由软件模拟PWM输出调制,需要占用单片机资源,难以精确调速,但单片机型号的选择余地较大。考虑到实际情况,本文选择第二种方案。CPU使用STC89C52单片机,配合软件编程实现。
关键词:智能小车 STC89C52RC单片机 L293D驱动寻迹避障遥控
1.2 设计要求:
整个系统的设计以单片机为核心,利用了多组红外线对管,将软件和硬件相结合。本系统能实现如下功能:
(1)自动沿预设轨道行驶小车在行驶过程中,能够自动检测预先设好的轨道,实现直道和弧形轨道的前进。若有偏离,能够自动纠正,返回到预设轨道上来。
(2)当小车探测到前进前方的障碍物时,可以自动报警调整,躲避障碍物,从无障碍区通过。小车通过障碍区后,能够自动循迹。
(3)无线遥控小车左转、右转、前进、后退、停止。
1.3 系统设计
根据要求,确定如下方案:在车体上加装光电检测器,实现对电动车的速度、位置、运行状况的实时检测,并将检测到的开关量信号传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。这种方案能实现对电动车的运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统的各项要求。
1.3.1 设计方案
采用单片机作为整个系统的核心,用其控制行进中的小车,以实现其既定的性能指标。充分分析我们的系统,其关键在于实现小车的自动控制,而在这一点上,单片机就显现出来它的优势控制简单、方便、快捷。这样一来,单片机就可以充分发挥其资源丰富、有较为强大的控制功能及可位寻址操作功能、价格低廉等优点。因此,这种方案是一种较为理想的方案。
针对本设计特点多开关量输入的复杂程序控制系统,需要擅长处理多开关量的标准单片机,而不能用精简I/O口和程序存储器的小体积单片机,D/A、A/D功能也不必选用。根据这些分析,我选定了51单片机作为本设计的主控装置,51单片机具有功能强大的位操作指令,I/O口均可按位寻址,程序空间多达8K,对于本设计也绰绰有余,更可贵的是51单片机价格非常低廉。
在综合考虑了传感器、两部电机的驱动等诸多因素后,我们决定采用一片STC89C52单片机(如图1-1),充分利用单片机的资源。
1.4 硬件模块介绍
1.4.1 STC89C52RC单片机
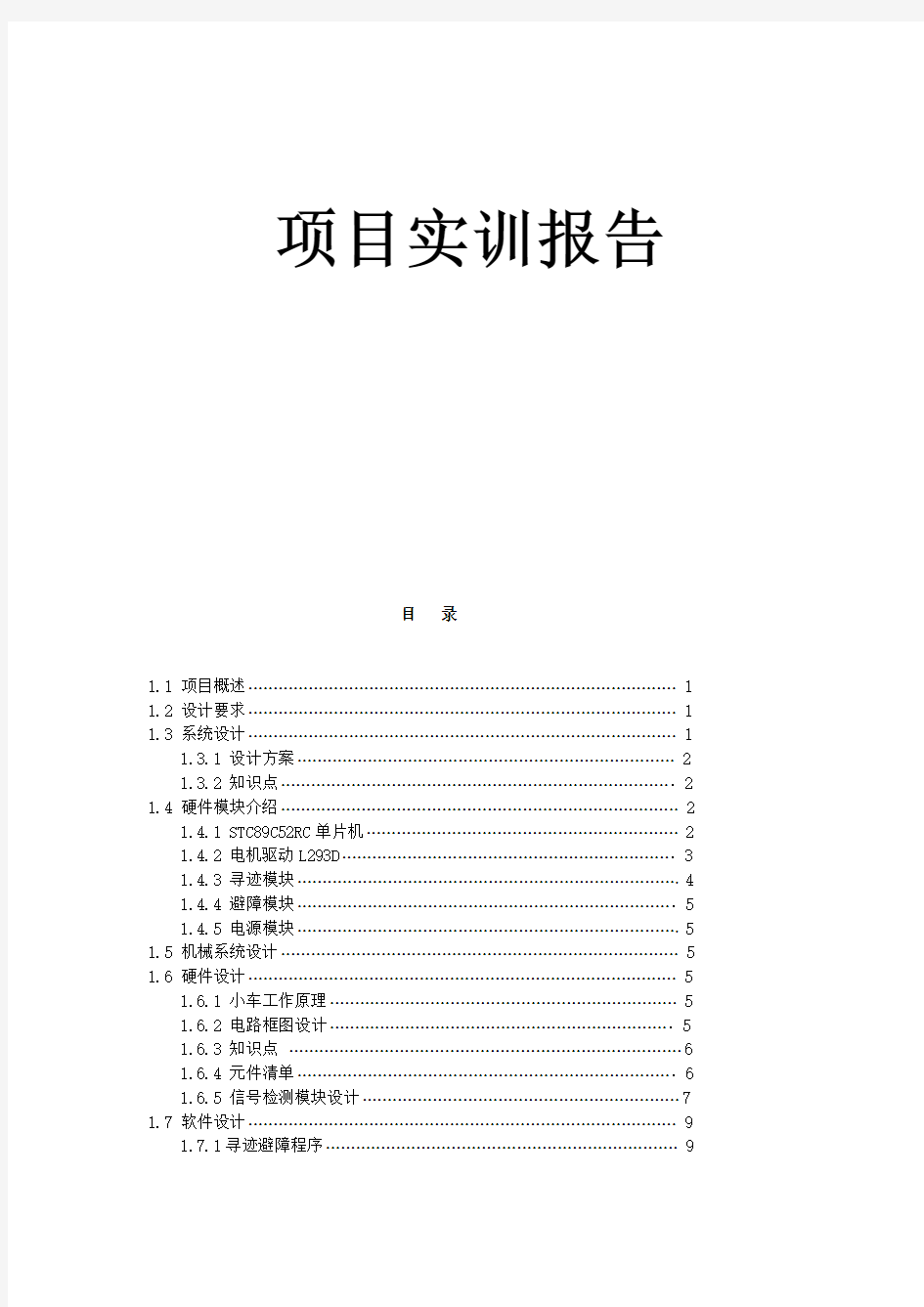
STC89C52RC单片机结构图如图1-4-1所示。
图1-4-1 STC89C52RC单片机结构图
STC89C52RC单片机的特点如下:
(1)增强型6时钟/机器周期、12时钟/机器周期任意设置。
(2)工作电压:5.5V~3.4V(5V单片机)/2.0V~3.8V(3V单片机)。
(3)工作频率:0~40MHZ,相当于普通80C51单片机;实际使用范围0~80HZ。
(4)8KB片内程序存储器,擦写次数10万次以上。
(5)片上集成512B RAM数据存储。
(6)通过I/O(32/36个),复位后为:P1、P2、P3、P4是弱上拉/准双向口(与普通MCS ~51 I/O口功能一样);P0口是开漏输出口,作为总线扩展时用,不用加上拉电阻;P0口作为I/O口用时,需加上拉电阻。
(7)ISP在系统可编程,无需专用编程器/仿真器,可通过串口直接下载用户程序,8KB程序3S即可完成一片。
(8)芯片内置EEPROM功能。
(9)硬件看门狗(WDT)。
(10)共3个16位定时器/计数器,兼容普通MSC-51单片机的定时器,其中定时器T0还可以当成2个8位定时器时用。
(11)外部中断4路,下降沿中断或低电平触发中断,掉电模式可有外部中断唤醒。(12)全双工异步串行口(UART),兼容普通的80C51单片机的串口。
(13)工作温度范围:0℃~75℃/-40℃~+85摄氏度。
1.4.2 电机驱动L293D
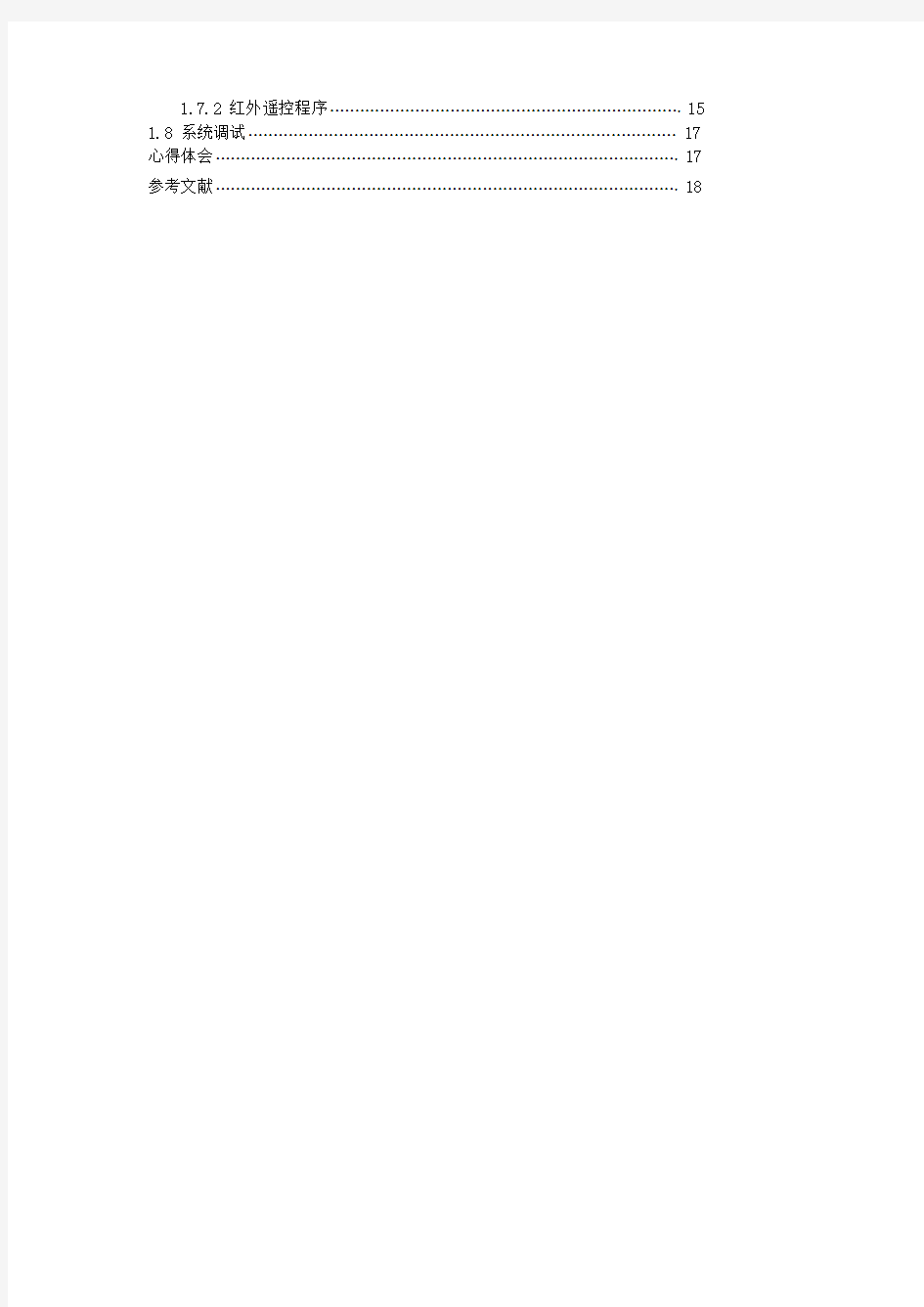
采用功率三极管作为功率放大器的输出控制直流电机。线性型驱动的电路结构和原理简单,加速能力强,采用由达林顿管组成的 H型桥式电路(如图1-4-2)。用单片机控制达林顿管使之工作在占空比可调的开关状态下,精确调整电动机转速。这种电路由于工作在管子的饱和截止模式下,效率非常高,H型桥式电路保证了简单的实现转速和方向的控制,电子管的开关速度很快,稳定性也极强,是一种广泛采用的 PWM调速技术。所以这里我们选用
L293D。
图1-4-2 H型桥式电路
L293D(图1-4-3)采用16引脚DIP封装,其内部集成了双极型H-桥电路,所有的开量都做成N型。
这种双极型脉冲调宽方式具有很多优点,如电流连续;电机可四角限运行;电机停止时有微
图1-4-3 L293D驱动芯片
振电流,起到“动力润滑”作用,消除正反向时的静摩擦死区;低速平稳性好等。L293D通过内部逻辑生成使能信号。H-桥电路的输入量可以用来设置马达转动方向,使能信号可以用于脉宽调整(PWM)。另外,L293D将2个H-桥电路集成到1片芯片上,这就意味着用1片芯片可以同时控制2个电机。每1个电机需要3个控制信号EN12、IN1、IN2,其中EN12是使能信号,IN1、IN2为电机转动方向控制信号,IN1、IN2分别为1,0时,电机正转,反之,电机反转。选用一路PWM连接EN12引脚,通过调整PWM的占空比可以调整电机的转速。1.4.3 循迹模块
采用五只红外对管(如图1-4-4)模块,分别置于小车车身前排,根据两只光电开关接受到白线与黑线的情况来控制小车转向来调整车向,测试表明,只要合理安装好两只光电开关的位置就可以很好的实现循迹的功能。
图1-4-4 红外对管(TCRT5000)实物图
1.4.4 避障模块
采用两块只红外对管模块置于小车前方。通过测试此种方案就能很好的实现小车避开障碍物,且充分的利用资源而不浪费。
1.4.5 电源模块
方案:智能小车系统需要5V~6V电源才能正常工作,所以采用1支1.5V与1支4V电池混合并联使用。
1.5 机械系统设计
本题目要求小车的机械系统稳定、灵活、简单,而三轮运动系统具备以上特点。但为了车体运动过程中更加稳定,前后分别用一个万向轮,左、右轮子由电机驱动转向。
驱动部分:智能小车的直流电机功率较小,而小车上装有电池、电机、电子器件等,使得电机负担较重。为使小车能够顺利启动,且运动平稳,在直流电机和轮车轴之间加装了三级减速齿轮。
电池的安装:将电池盒尽量安置在车体的电机前或后位置,降低车体重心,提高稳定性,同时可增加驱动轮的抓地力,减小轮子空转所引起的误差。
1.6 硬件设计
1.6.1 小车工作原理
智能小车采用左右轮两边各用一个电机驱动,调制左右两个轮子的转速起停从而达到控制转向的目的,前、后轮是万象轮,起支撑的作用。将五路循迹光电对管模块分别装在车头下的前排(贴地面稍近效果更佳)。例如:当车身下的1号传感器检测到黑线时,主控芯片控制右轮电机停止,车向右修正,当车身下右边5号传感器检测到黑线时,主控芯片控制左轮电机停止,车向左修正。小车各种运动状态如表1-6-1。
避障的原理和循线一样,在车身右边装一个光电对管模块,当其检测到障碍物时,主控芯片给出信号控制小车倒退,转向,从而避开障碍物。
1.6.2电路框图设计
由以上设计思路可设计出智能小车电路框图(图1-6-1)
图1-6-1 电路设计框图
1.6.3知识点
本实训项目需要通过学习和查阅资料,了解和掌握以下知识。(1)电路原理图设计。
(2)单片机复位电路工作原理设计。
(3)单片机晶振带工作原理设计
(4)驱动器L293D直流电机驱动的特性及使用。
(5)4位共阴极数显的使用方法
(6)STC89C52RC单片机引脚。
(7)Keil uVision3编程工具的使用方法。
(8)单片机C语言程序设计。
(9)PCB板的设计。
(10)SPI程序下载工具的使用。
(11)红外对管的原理。
(12)无线遥控电路设计。
1.6.4 元件清单
基于STC89C52RC单片机智能小车的设计元件清单如表1-6-2所示。
1.6.5信号检测模块设计
小车循迹原理是小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。所以在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。市面上有很多红外传感器,在这里我选用TCRT5000型光电对管。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号,再通过LM339(比较器)作比较来采集高低电平,从而实现信号的检测。设计出寻迹模块电路图(图1-6-2)。
图1-6-2 protel仿真寻迹电路
小车避障模块则与寻迹模原理相同。如果遇到障碍物,反射光被装在小车上的避障模块接收管接收。再通过多个74LS00(与非门)来采集高低电平,从而实现信号的检测,通过单片机处理数据输入PWM波,从而控制电机正反转来控制小车前进方向避开障碍物。避障模块上有多圈精密可调电位器,可根据使用环境调节.调节范围从3cm-30cm。因为是反射原理,跟具体的反射目标相关,可根据情况调节。设计出电路原理图(图1-6-3)。
图1-6-3 protel仿真避障电路
主控模块主要是对采集信号进行分析,在L239D的EN 端输入PWM波,同时通过调整PWM波的占空比控制电机速度,起停。其电路图如图1-6-4。
图1-6-4 protel仿真主控电路
1.7软件设计
1.7.1 寻迹避障程序流程图
由于智能小车的设计主要用红外对管进行数据采集,来实现小车的寻迹、避障、无线遥控等功能。主要涉及开关量信号的处理问题,所以程序用C语言编写最为简单。设计出寻迹、避障程序流程图(图1-7-1)
图1-7-1 寻迹加避障程序流程图
程序清单如下:
#include
#define uchar unsigned char
#define uint unsigned int
sbit K1=P1^0;
sbit K2=P1^1;
sbit K3=P1^2;
sbit K4=P1^3;
sbit K5=P1^4;
sbit KIN1=P1^5;
sbit KIN2=P1^6;
sbit out1 = P2^0 ;
sbit out2 = P2^1 ;
sbit out3 = P2^2 ;
sbit out4 = P2^3 ;
void delay(uint t) //延时程序1 {
uchar j;
while(t--)
{for(j=5;j>0;j--);}
}
//左转
void comeleft()
{ uchar i;
out1=0;
out2=0;
out3=1;
out4=0;
for(i=0;i<10;i++)
{
out1=!out1;
delay(1);
}
}
//左微转
void sleft()
{ uchar i;
out1=0;
out2=0;
out3=1;
out4=0;
for(i=0;i<5;i++)
{
out1=!out1;
delay(1);
}
}
//右微转
void sright()
{ uchar i;
out1=1;
out2=0;
out3=0;
out4=0;
for(i=0;i<5;i++)
{
out3=!out3;
delay(1);
}
}
//右转
void comeright () { uchar i;
out1=1;
out2=0;
out3=0;
out4=0;
for(i=0;i<10;i++)
{
out3=!out3;
delay(10);
}
}
//前进加速;
void comeon()
{ out2=0;
out4=0;
out1=1;
out3=1;
}
//避障原路返回
void shunback()
{
if((!KIN1)|(!KIN2))
{
out1=0;
out2=1;
out3=1;
out4=0;
delay(4000);
comeon();
delay(4000);
out1=1;
out2=0;
out3=0;
out4=0;
delay(1000);
comeon();
delay(2000);
while(K1&&K2&&K3&&K4&&K5){ comeright ();} ;
}
else{;}
}
//循迹
void scanline()
{
P1=0XFF;
if(K5==0){comeleft();}
else if(!K1) { comeright ();}
else if(!K4) { sleft();comeon(); }
else if(!K2) { sright();comeon(); }
else if(!K3) { comeon();comeon(); }
else {P2=P2;}
}
void main(void)
{
P1=0XFF;
P2=0XFF;
while(1)
{
shunback();
scanline();
}
}
1.7.2红外遥控程序
设计出红外线遥控接收程序流程图(图1-7-2)。
图1-7-2 遥控接收程序流程图
红外线遥控小车程序清单
#include
#define uchar unsigned char
#define uint unsigned int
sbit SET1=P2^4 ;
sbit SET2 =P2^5;
sbit SET3 =P2^6;
sbit out1 = P2^0 ;
sbit out2 = P2^1 ;
sbit out3 = P2^2 ;
sbit out4 = P2^3 ;
unsigned long xdata rec_code;
unsigned long xdata time_us;
unsigned char xdata rec_cnt;
unsigned char xdata kbuf;
uchar sdata;
bit rec_b;
bit key_save;
bit keyp;
uchar code seg7code[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
void delay(uchar t) //延时程序1
{
uchar j;
while(t--)
{for(j=50;j>0;j--);}
}
void Init()
{
TMOD = 0x09; //T/C1采用16位定时器/计数器ET1 = 1; //定时器1开中断
TH0 = 0x00;
TL0 = 0x00;
ET0 = 0;
TR0 = 1; //定时计数器启动计数
EX0 = 1; //外部中断0关中断
EX1 = 0; //外中断1关中断
EA = 1; //CPU开中断
}
void stop()
{
out1=0;
out2=0;
out3=0;
out4=0;
delay(10);
}
//左转
void comeleft()
{
out1=0;
out2=1;
out3=1;
out4=0;
delay(200);
}
//右转
void comeright ()
{
out1=1;
out2=0;
out3=0;
out4=1;
delay(200);
}
//前进加速;
void comeon()
{ out2=0;
out4=0;
out1=1;
out3=1;
}
//后退
void comeback()
{
out1=0;
out3=0;
out2=1;
out4=1;
delay(200);
}
//避开障碍物
void shunout()
{
if(sdata==157){ comeon();rec_code=0;sdata=0;}
else if (sdata==87){comeback();rec_code=0;sdata=0;} else if (sdata==253){stop();rec_code=0;sdata=0;}
else if (sdata==61){comeright();rec_code=0;sdata=0;} else if (sdata==221){comeleft();rec_code=0;sdata=0;} else{;}
}
void inter_x0() interrupt 0
{
TR0 = 0;
time_us = (unsigned long)(TH0<<8) + TL0;
TH0 = 0;
TL0 = 0;
TR0 = 1;
if(time_us>3800&&time_us<4500)
{
rec_cnt = 0;
rec_code = 0;
}
else if(time_us>300&&time_us<700)
{
rec_cnt ++;
rec_code = rec_code<<1;
//rec_code = rec_code &0x00000000; }
else if(time_us>1300&&time_us<1750)
{
rec_cnt ++;
rec_code = rec_code<<1;
rec_code = rec_code|0x00000001; //IO_buzz = 0;
}
else if(time_us>1800&&time_us<2200)
{
rec_code = rec_code;
rec_cnt++; //
if(rec_cnt>1)
{
rec_cnt = 0;
key_save = 1;
}
}
if(rec_cnt==32)
{
rec_b = 1;
key_save = 0;
rec_cnt = 0;
}
}
void GetKeyValue()
{
if(rec_b)
{
unsigned char da;
rec_b = 0;
kbuf = (rec_code&0x0000ff00)>>8; da = rec_code&0x000000ff;
if(kbuf==~da)
{
sdata=da;
}
}
}
void main()
{
P1=0XFF;
P2=0XFF;
P3=0XFF;
P0=0XFF;
Init();
while(1)
{
GetKeyValue();
shunout();
}
}
1.8 系统调试
在在Keil软件中调试寻迹加避障程序并生成Hex文件。将在Keil下生成的HEX文件下载到STC89C52单片机中。将下车加上电源(注意:如果加的电源电压大于6V将跳线插到大于6V的针脚上,5V则插在5V所对应的针脚上,否则单片机会烧坏),将小车至于预先设计好的黑色胶带地面上。按下电源按钮启动小车,小车按照黑色胶带路线行驶。当在黑色轨道上放置一障碍物,小车能够绕开障碍物自动修正方向继续寻迹。以上测试说明智能小车寻迹、避障功能调试成功。
同上下载遥控程序,按下红外遥控器相应的键能够控制小车前进、后退、左转、右转、停止等。说明小车无线遥控功能测试成功。
根据测试的情况来看,寻迹效果比较好。避障功能不是很完美,当遇到不反光的障碍物时红外线接收头接收不到反射光导致小车避障功能大打折扣。遥控小车转弯时,小车没有固定的转弯角度。当小车运行速度快时,遥控小车转弯会使小车原地打转。
心得体会
这次实训题目是基于STC89C52RC单片机智能小车的设计与开发。实训中自己焊接主板又一次提升了我们的焊接技术,这对作为即将毕业的计算机应用专业的学生走向工作岗位至关重要。熟悉了很多我们曾今从未认识的元器件,比如红外线对管、无线遥控以及一些简单的传感器。STC89C52RC单片机虽然我们从未用过,但在以前学习C51单片机的基础上遇到问题也能迎刃而解。实训中不但拓展了我们的思维,还能够把这次实训理论和经验与以后的工作和实际生活相结合应用。
通过这次课程设计使我们懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。同时在设计的过程中发现了自己的不足。
系统调试中,许多小组都因为所用的电源电压过高导致单片机被烧坏,我们小组也未能幸免。这次给了我们极大的教训,在以后的项目实训和工作中一定要按照规定进行设计。
在这次实训中,我们学到了该怎样去拟定一个项目计划并去实现它。本次项目的设计与开发能够顺利完成,还要感谢各位老师的指导和身边许多同学的帮助。在设计过程中,许多老师给予了悉心的指导,最重要的是给了我们解决问题的思路和方法,在此,再次对你们表示最真挚的感谢!
参考文献
[1]郭惠,吴迅.单片机C语言程序设计完全自学手册[M].电子工业出版社,2008.10:1-200.
[2]王东锋,王会良,董冠强. 单片机C语言应用100例[M]. 电子工业出版社,2009.3:145-300.
[3]韩毅,杨天.基于HCS12单片机的智能寻迹模型车的设计与实现[J].学术期刊,2008,2 9(18):1535-1955.
[4] 王晓明.电动机的单片机控制[J]. 学术期刊,2002,13(15):1322-1755.
电子实习报告智能循迹 小车 文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
电子实习报告 学院:电气学院 专业班级: 学生姓名: 指导教师: 完成时间: 2014/8/29 成绩:
目录 一、设计要求及注意事项 (2) 二、设计的作用、目的 (2) 三、设计的具体实现 (2) 1.系统概述 (2) 2.单元电路设计(或仿真)与分析 (3) (1)电源模 块 (3) (2)电机驱动模块 (4) (3)简易控制模 块 (6) (4)红外循迹模 块 (7) 3.电路的安装与调试 (8) (1)安装 (8)
(2)调 试 (10) 四、心得体会,存在的问题和进一步改进的意见 (11) 五、附录 (11) 1.元件说明 (11) (1)电 阻 (11) (2)电解电 容 (11) (3)LED................................................. ..12 (4)芯 片 (12)
电子实习报告 一、设计要求及注意事项 1.能独立完成设计内容并完全掌握其内部结构、工作原理和安装调试过程。 2.要求在设计过程中能熟练掌握其元器件的计算、焊接技术和电路故障的判别方法。 3.焊接顺序,先贴片后插件。 4.要求焊接的电路板调试时正常且安装好小车后能正常运行。 5.进入实习基地后按指定的实验台就位,未经许可,不得擅自挪换仪器设备。 6.要爱护仪器设备及其它公物,凡违反操作规程,不听从教师指导而损坏者,按规定赔偿。 7.未经指导教师许可,不得做规定以外的实验项目。 8.要保持实习室的整洁和安静,不准大声喧哗,不准随地吐痰,不准乱丢纸屑及杂物。 9. 必须严格按设备操作书的要求去使用设备,注意人身及设备安全,不要盲目操作。 二、设计的作用、目的 1.利用所学过的基础知识,通过本次电子实习培养独立解决实际问题的能力; 2.巩固本课程所学的理论知识和实验技能;
宁波大学 创新性开放实验报告题目基于光电传感器的自动寻迹小车 学号: 姓名: 专业: 指导教师: 目录 光电感应智能车............................................................................................. 错误!未定义书签。
一、硬件系统…………………………………………………………………………………错误!未定义书签。 (一)硬件框图 (3) 1、电源模块 (4) 2、寻迹模块 (4) 3、驱动模块 (5) 4、测速模块 (6) 二、软件系统 (7) (一)主程序流程图 (7) 1、电机驱动 (8) 2、舵机驱动 (10) 参考文献 (13)
光电感应自动寻迹智能车 【摘要】如果把自动寻迹小车成比例的扩大数倍,就成为真正有意义上的智能车,可以运用于军事、民用领域,对未来汽车行业的发展有一定的借鉴意义。通过光电传感器来寻找轨迹,以所编写的程序为软件支持,通过单片机计算生成相应的控制参数,驱动电机来使小车按照轨迹运动。其中小车在直线行驶过程控制参数保持不变,匀速行驶,而在小车要转弯之前则要先减速以防止小车过弯时冲出赛道,弯道过去之后在加速行驶以减少行驶时间。 【关键词】红外传感器;PID控制;自动寻迹 一、硬件系统 (一)智能小车的整体结构图 智能车通过单片机来接受和发出参数状态信号,电源模块是给智能车各个模块提供电压以使模块可以正常运作,寻迹模块则是包含着参数输送给单片机的作用,驱动模块是小车动起来的根源,测速模块是为了控制车速以使智能车平稳的沿着车道运行。
简单电子系统设计报告 ---------智能循迹小车 学号201009130102 年级10 学院理学院 专业电子信息科学与技术姓名马洪岳 指导教师刘怀强
摘要 本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。采用与白色地面色差很大的黑色路线引导小车按照既定路线前进,在意外偏离引导线的情况下自动回位。 本设计采用单片机STC89C51作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路。自动寻迹的功能采用红外传感器,通过检测高低电平将信号送给单片机,由单片机通过控制驱动芯片L298N驱动电动小车的电机,实现小车的动作。 关键词:STC89C51单片机;L298N;红外传感器;寻迹 一、设计目的 通过设计进一步掌握51单片机的应用,特别是在控制系统中的应用。进一步学习51单片机在系统中的控制功能,能够合理设计单片机的外围电路,并使之与单片机构成整个系统。 二、设计要求 该智能车采用红外传感器对赛道进行道路检测,单片机根据采集到的信号的不同状态判断小车当前状态,通过电机驱动芯片L298N发出控制命令,控制电机的工作状态以实现对小车姿态的控制,绕跑到行驶一周。 三、软硬件设计 硬件电路的设计 1、最小系统: 小车采用atmel公司的AT89C52单片机作为控制芯片,图1是其最小系统电路。主要包括:时钟电路、电源电路、复位电路。其中各个部分的功能如下: (1)、电源电路:给单片机提供5V电源。 (2)、复位电路:在电压达到正常值时给单片机一个复位信号。
图1 单片机最小系统原理图 2、电源电路设计: 模型车通过自身系统,采集赛道信息,获取自身速度信息,加以处理,由芯片给出指令控制其前进转向等动作,各部分都需要由电路支持,电源管理尤为重要。在本设计中,51单片机使用5V电源,电机及舵机使用5V电源。考虑到电源为电池组,额定电压为4.5V,实际充满电后电压则为4-4.5V,所以单片机及传感器模块采用最小系统模块稳压后的5V电源供电,舵机及电机直接由电池供电。 3、传感器电路: 光电寻线方案一般由多对红外收发管组成,通过检测接收到的反射光强,判断黑白线。原理图由红外对管和电压比较器两部分组成,红外对管输出的模拟电压通过电压比较器转换成数字电平输出到单片机。
电子实习报告智能循迹小 车 Prepared on 24 November 2020
电子实习报告 学院:电气学院 专业班级: 学生姓名: 指导教师: 完成时间: 2014/8/29 成绩:
目录 一、设计要求及注意事项 (2) 二、设计的作用、目的 (2) 三、设计的具体实现 (2) 1.系统概述 (2) 2.单元电路设计(或仿真)与分析 (3) (1)电源模 块 (3) (2)电机驱动模块 (4) (3)简易控制模块 (6) (4)红外循迹模 块 (7) 3.电路的安装与调试 (8) (1)安装 (8) (2)调试 (10) 四、心得体会,存在的问题和进一步改进的意见 (11) 五、附录 (11) 1.元件说明 (11)
(1)电阻 (11) (2)电解电容 (11) (3)LED (12) (4)芯片 (12)
电子实习报告 一、设计要求及注意事项 1.能独立完成设计内容并完全掌握其内部结构、工作原理和安装调试过程。 2.要求在设计过程中能熟练掌握其元器件的计算、焊接技术和电路故障的判别方法。 3.焊接顺序,先贴片后插件。 4.要求焊接的电路板调试时正常且安装好小车后能正常运行。 5.进入实习基地后按指定的实验台就位,未经许可,不得擅自挪换仪器设备。 6.要爱护仪器设备及其它公物,凡违反操作规程,不听从教师指导而损坏者,按规定赔偿。 7.未经指导教师许可,不得做规定以外的实验项目。 8.要保持实习室的整洁和安静,不准大声喧哗,不准随地吐痰,不准乱丢纸屑及杂物。 9. 必须严格按设备操作书的要求去使用设备,注意人身及设备安全,不要盲目操作。 二、设计的作用、目的 1.利用所学过的基础知识,通过本次电子实习培养独立解决实际问题的能力;2.巩固本课程所学的理论知识和实验技能; 3.掌握常用电子电路的一般设计方法,提高设计能力和实验、动手能力,为今后从事电子电路的设计、研制电子产品打下基础。 4.熟练掌握焊接机能、电子元器件的识别。 5.了解智能循迹小车构成的设计方法。
基于STC89C52单片机红外智能循迹小车 实验报告册 学院:电气工程学院 协会:电子科技协会 班级:电气1206 班 姓名:蔡申申 学号:201223910625 联系方式:151 **** ****
摘要 本报告论述了自己参加第八届河南工业大学科技创新大赛——基于STC89C52RC单片机红外智能循迹小车的方案论证、制作过程、调试过程。设计采用STC89C52RC单片机为核心控制器件,采用TCRT5000红外反射式开关传感器作为小车的循迹模块来识别白色路面中央的黑色引导线,采集信号并将信号转换为能被单片机识别的数字信号,单片机获取路面信息后,进行分析、处理,最后控制减速电机转动实现转向。实验表明:该系统抗干扰能力强、电路结构简单、制作成本低,运行平稳、可靠性好。 关键词:STC89C52单片机、反射式光电对管、PWM调速 减速电机
目录 摘要 (2) 1 绪论 (4) 1.1 智能循迹小车概述 (4) 1.1.1 循迹小车的发展历程回顾 (4) 1.1.2 智能循迹分类 (4) 1.1.3 智能循迹小车的应用 (5) 2 智能循迹小车总体设计方案 (5) 2.1 整体设计方案 (5) 2.1.1 系统设计步骤 (5) 2.1.2 系统基本组成 (5) 2.2 整体控制方案确定 (6) 3 系统的硬件设计 (6) 3.1 单片机电路的设计 (6) 3.1.1 单片机的功能特性描述 (6) 3.1.2 晶振电路 (7) 3.1.3 复位电路 (7) 3.2 光电传感器模块 (8) 3.2.1 传感器分布 (8) 3.3 电机驱动电路 (9) 3.3.1 L298N引脚结构 (9) 3.3.2 电机驱动原理 (9) 4 系统的软件设计 (10) 4.1 软件设计的流程 (10) 4.2 本系统的编译器 (10) 5 系统的总体调试 (11) 5.1 硬件的测试 (11) 5.2 系统的软件调试 (11) 结论 (11) 致谢 (11) 参考文献 (12) 附录A 原理图与模块电路图 (12) 附录B 程序代码 (13) 附录C 硬件实物图 (15)
时间:周三上午 组号:5 创新性实验报告 题目寻迹小车 学院电子信息学院 专业xxx 班级xxx 学号xxx 学生姓名xxx 指导教师xxx 完成日期2014年5月
目录 1 摘要 (3) 2 引言 (3) 3系统总体设计 (3) 4硬件电路设计 (5) 5 制作与调试 (6) 5.1 硬件电路的布线与焊接 (6) 第一步:电路部分基本焊接 (6) 第二步:机械组装 (6) 第三步:安装光电回路 (7) 5.2 调试 (7) 整车调试: (7) 6 结论及建议 (7) 7 附录 (8)
1 摘要 本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。采用与白色地面色差很大的黑色路线引导小车按照既定路线前进。LM393随时比较着两路光敏电阻的大小,当出现不平衡时(例如一侧压黑色跑道)立即控制一侧电机停转,另一侧电机加速旋转,从而使小车修正方向,恢复到正确的方向上,整个过程是一 个闭环控制,因此能快速灵敏地控制。 关键词:红外反射式传感器,自寻迹小车,闭环控制 2 引言 随着素质教育的越来越被重视,很多学校都把制作智能小车作为首选课题,智能小车生动有趣还牵涉到机械结构、电子基础、传感器原理、自动控制甚至单片机编程等诸多学科知识,学生通过动手实践能大大提高解决实际问题的能力,而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循迹小车、救火机器人、足球机器人、避障机器人、遥控汽车等课题。 我们制作的是一款由数字电路来控制的智能循迹小车,在组装过程中我们不但能熟悉机械原理还能逐步学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。 3 系统总体设计 本系统的整体框图如图1所示。它包括传感器电路、电压比较电路、电 机驱动电路、电源电路。
智能产品设计实训报告书 课程名称:智能产品设计 班级:应用电子技术15级2班 小组成员(学号):商育诚(39)王少勇(91) 实训项目:智能小车 实训时间:2017年5月8日 指导老师:何敬银老师 填表日期:2017年5月14日星期日
实训目的-------------------------------------3 实训要求-------------------------------------3 实训内容-------------------------------------4 智能小车元器件清单-----------------------------------------------4 智能小车代码-----------------------------------------------------5 智能小车电路图---------------------------------------------------10 智能小车焊接-----------------------------------------------------11 智能小车模块系统详解---------------------------------------------12 实训成果展示---------------------------------13 收获和体会-----------------------------------14
实训目的: 制作一个基于单片机控制的智能小车,可以进行多种功能。也让我们自己学习,学习到单片机的知识和单片机编程的知识还有电阻的识别和一些电路的知识。提高了我们焊接技术和团队合作能力,增加了我们制作电子产品产品的经验。这个实训还有对于一些需要进行PPT的演讲,不经给我们一个展示自己作品的平台,更重要的是给我一个增强自信心的机会,展现自己和展现自己的作品这个实训不仅让我们学会更多的知识而且还满足我们自己对自己亲自动手制作电子产品的愿望。 实训要求: 能够熟练对老师进行智能小车源代码的讲解,还有对于电路图的了解和电路知识的应用,还有对于另一些芯片的知识进行学习。还有熟练掌握元器件的名称大小的识别。还有在焊接过程中可以可以让我们的焊接技术更加地熟练,可以让我们的小组成员合作更好,增强了小组成员的合作默契。
实训报告课程名称:单片机实训 完成日期:2014 年 7 月 10 日
任务书 实训(习)题目: 智能小车的功能设计与实现 实训(习)目的: (1)、巩固、加深和扩大单片机应用的知识面,提高综合及灵活运用所学知识解决工业控制的能力; (2)培养针对课程需要。锻炼学生查阅有关手册、图标及文献资料的自学能力,提高组成系统、编程、调试的动手能力; (3)对课程的方案分析、选择、比较、熟悉单片机系统开发、研制的过程,软硬件设计的方法、内容及步骤。 实训(习)内容: 安装智能小车及相关功能设计、调试 实训(习)要求: 1. 本实训要求由一个团队完成,团队人员不超过8个人。 2. 通过所学知识并利用智能小车、计算机、 keil软件、烧写软件等完成实训项目,并拟定实训报告。 3. 能正确组装和调试智能小车。 4. 实训完成后,根据实训内容撰写实训报告书一份。 实训报告应包括的主要内容(参考) 1 系统硬件组成与工作原理 1.1 控制器与最小系统 1.2 显示模块与按键模块 1.3 报警模块 1.4 电机与驱动模块的工作原理与接口 1.5循迹模块的工作原理与接口 1.6 避障模块的工作原理与接口 2 功能方案及软件设计 2.1 功能设计 2.2 软件设计 (结合某一赛道、障碍设置说明程序设计思路,给出流程图、程序代码) 3功能调试与总结 3.1 功能调试 排版要求:正文小4宋体;段首缩进2字,行间距固定值18磅。内容展开可以
按3级标题形式,如:按1 ……、1.1 ……、1.1.1 形式(如果需要)。每个1级标题另起一页,1级标题三号黑体居中,题序和标题之间空两个空格,不加标点,段前、段后均为1行,固定值22磅。2级标题:四号黑体左起,四号黑体,段前、段后均为12磅。三级标题:小四号黑体左起,段前、段后均为6磅。 图名、表名五号黑体,英文、数字字体为Times New Roman 页边距:上、下、左3厘米,右2厘米,A4纸打印。 1系统硬件组成与工作原理 1.1.1控制器与最小系统 最小系统:要使一块单片机芯片工作起来最简陋的接线方式就是单片机的
循迹小车实训报告 目录 一、项目目标 (3) 二、项目内容 (3) 三、项目原理 (3) 四、项目原理图和实物图 (3) 1、电路原理方框图 (4) 2、实物图 (4) 3、总共装图 (4) 五、项目模块 (5) 1、寻迹模块 (5) 2、显示模块(1602液晶/数码管) (5) 3、提示音模块 (5) 4、FPGA模块 (5) 5、单片机控制模块 (6) 六、项目程序 (7) 1、循迹程序(部分) (7) 2、FPGA程序(部分) (8) 七、总结 (9)
一、项目目标 1、学会智能电子产品的功能设计与任务分析,能进行小型电子产品方案设计; 2、掌握基于51单片机、FPGA 模数混合硬件系统设计和程序设计; 3、熟悉电子信息类企业项目完整的运作过程及管理规范,培养团队协作能力、沟通能力、创新能力和组织能力。 二、项目内容 任务描述:完成任务分析、功能设计,硬件系统设计、制作与装调,软件系统设计及整机调试等工作任务。 具体内容: 1、自行设计、制作寻迹电路板; 2、采用制作的寻迹电路板、控制板与提供的小车车体搭建寻迹小车; 3、用C 语言和VHDL 语言编写程序。 三、项目原理 这是一种基于STC89C52RC 单片机的小车寻迹系统。该系统采用四组高灵敏度的光敏感应,对路面黑色轨迹进行检测,并利用单片机产生的PWM 波,控制小车速度。测试结果表明,该系统能够平稳跟踪给定的路径。 四、项目原理图和实物图(高菊、谢鹏飞完成) 1、电路原理方框图 单片机 显示(液晶或数码管) 蜂鸣器 寻迹板(4路) FPGA 小车行驶 状态数据 寻迹信号 启动信号 显示寻迹状态 电机驱动 寻迹信号 显示小车 行驶状态 左 右
电子实习报告智能循迹小车
电子实习报告 学院:电气学院专业班级: 学生姓名: 指导教师: 完成时间:2014/8/29 成绩:
目录 一、设计要求及注意事项 (2) 二、设计的作用、目的 (2) 三、设计的具体实现 (2) 1.系统概述 (2) 2.单元电路设计(或仿真)与分析 (3) (1)电源模块..................................... (3) (2)电机驱动模块........................................ (4) (3)简易控制模块 (6) (4)红外循迹模块..................................... (7) 3.电路的安装与调试........................................ .. (8) (1)安装 (8) (2)调试 (10) 四、心得体会,存在的问题和进一步改进的意见 (11)
五、附录 (11) 1.元件说明 (11) (1)电 阻 (11) (2)电解电容 (11) (3)LED (1) 2 (4)芯片 (12)
电子实习报告 一、设计要求及注意事项 1.能独立完成设计内容并完全掌握其内部结构、工作原理和安装调试过程。 2.要求在设计过程中能熟练掌握其元器件的计算、焊接技术和电路故障的判别方法。 3.焊接顺序,先贴片后插件。 4.要求焊接的电路板调试时正常且安装好小车后能正常运行。 5.进入实习基地后按指定的实验台就位,未经许可,不得擅自挪换仪器设备。 6.要爱护仪器设备及其它公物,凡违反操作规程,不听从教师指导而损坏者,按规定赔偿。 7.未经指导教师许可,不得做规定以外的实验项目。 8.要保持实习室的整洁和安静,不准大声喧哗,不准随地吐痰,不准乱丢纸屑及杂物。 9. 必须严格按设备操作书的要求去使用设备,注意人身及设备安全,不要盲目操作。 二、设计的作用、目的 1.利用所学过的基础知识,通过本次电子实习培养独立解决实际问题的能力;2.巩固本课程所学的理论知识和实验技能; 3.掌握常用电子电路的一般设计方法,提高设计能力和实验、动手能力,为今后从事电子电路的设计、研制电子产品打下基础。 4.熟练掌握焊接机能、电子元器件的识别。 5.了解智能循迹小车构成的设计方法。 6.培养团队的协作和沟通能力。 三、设计的具体实现 1.系统概述 智能移动机器人平台以双电机轮式小车为底层移动平台,单片机为控制核心,通过红外探测模块实现对行车路线的感知,电机驱动模块实现对直流电机的驱动控制,从而完成自动行驶的功能。 如图:
智能小车循迹报告 电工电子实习报告 学院: 专业班级: 学生姓名: 指导教师: 完成时间: 成绩: 评阅意见: 评阅教师日期 智能循迹小车设计报告一. 设计要求 (1)(通过理论学习掌握基本的焊接知识以及电子产品的生产流程。 (2)(熟悉掌握手工焊接的方法与技巧。 (3)(完成循迹智能小车的安装与调试 二. 设计的作用、目的 1.利用所学过的基础知识,通过本次电子实习培养独立解决实际问题的能力; 2(巩固本课程所学的理论知识和实验技能; 3(掌握常用电子电路的一般设计方法,提高设计能力和实验、动手能力,为今后从事电子电路的设计、研制电子产品打下基础。 三.设计的具体实现 1. 系统概述 智能机器人小车的设计中我们使用的是一体反射式红外对管,所谓一体就是发射管和接受管固定在一起,反射式的工作原理就是接收管接收到的信号是发射管发
出的红外光经过反射物的反射后得到的,所以使用红外对管进行循迹时必须是白色地板 红外寻迹是利用红外光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。(为简化操作,本次实习只安装了两侧的探头) 1)行驶直线的控制:利用红外传感器的左右最外端的探头检测黑线,如果全白则说明在道中间,没有偏离轨道,走直线;一旦右侧探头检测到黑线,说明小车外侧探头已跑出轨道,让车左拐;同理一旦左侧检测到黑线,说明左侧探头已经出线,执行右拐命令。 2)拐直角弯的控制:当车前探头检测到黑线,执行直走,让车中心探头去检测,一旦探头检测到黑线开始左拐,直到车位探头检测到跳出左拐命令,继续开始执行循迹,通过设置车中间探头与车尾探头的间距,便可以实现拐弯的角度,进而顺利入弯。 小车的硬件主要包括4大模块:即电源模块、电机驱动模块、红外循迹 模块、简易控制模块。 系统工作框图如下: 驱动电机检测黑线简易控制控制小车 2.单元电路设计与分析 1)电源模块 电源模块电路板
综合电子设计与实践 课程实验报告 课题名称:循迹小车的制作 班级:XXXXXX 实验者:XXXXXX 实验时间:XXXXX
摘要 本设计主要有三个模块包括信号检测模块、主控模块、电机驱动模块。信号检测模块采用红外光对管,用以对黑线进行检测。主控电路采用宏晶公司的8051核心的STC89C52单片机为控制芯片。电机驱动模块采用意法半导体的L298N专用电机驱动芯片,单片控制与传统分立元件电路相比,使整个系统有很好的稳定性。信号检测模块将采集到的路况信号传入STC89C52单片机,经单片机处理过后对L298N发出指令尽心相应的调整。小车速度由单片机输出的PWM波控制。控制电动小车的速度及转向,从而实现自动循迹的功能。 关键词:智能小车STC89C52单片机L298N 红外光对管 一.绪论 (一)智能小车的作用和意义 自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。随着科学技术的发展,机器人的感系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。视觉的典型应用领域为自主式智能导航一种实用有效的方法。机器人要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当给机器人一个视觉功能。避障控制系统是基于自动导引小车(A VG—auto-guide vehicle)系统,基于它的智能小车实现自动识别路线,判断并自动避开障碍,选择正确的行进路线。使用传感器感知路线和障碍并作出判断和相应的执行动作。该智能小车可以作为机器人的典型代表。它可以分为三大组成部分:传感器检测部分、CPU、执行部分。机器人要实现自动避障功能,还可以扩展循迹等功能,感知导引线和障碍物。可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。基于上述要求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗略感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器来充当。智能小车的执行部分,是由直流电机来充当的,主要控制小车的行进方向和速度。单片机驱动直流电机一般有两种方案:第一,勿需占用单片机资源,直接选择有PWM功能的单片机,这样可以实现精确调速;第二,可以由软件模拟PWM输出调制,需要占用单片机资源,难以精确调速,但单片机型号的选择余地较大。考虑到实际情况,本文选择第二种方案。CPU使用STC89C52单片机,配合软件编程实现 (二)智能小车的现状 现智能小车发展很快,从智能玩具到其它各行业都有实质成果。其基本可实现循迹、避障、检测贴片、寻光入库、避崖等基本功能,这几节的电子设计大赛智能小车又在向声控系
. ... .. . 电子信息专业实验报告 课程电子信息系统综合设计实验MCU部分 实验题目智能机器小车设计实验总分 学生学号 学生学号 学生学号 实验时间地点分组 电子信息学院专业实验中心 . .
目录 一、摘要 二、题目要求 三、软硬件设计方案 四、各部分电路的作用及电路工作原理分析 五、系统调试与实验结果 六、实验结果 七、拓展功能 八、参考资料 九、附录 一、摘要 摘要:智能循迹小车主要由单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。本次设计我们采用STC89C52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够识别黑白两色路面,电机模块由L293D芯片和两个减速直流电机构成,组成了智能车的动力系统,电源采用7.2V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。 关键词智能小车STC89C52单片机L293D芯片红外光对管 二、题目要求 “智能寻迹机器小车设计”,要求采用MCS-51单片机为控制芯片,设计出一个能够识别并沿着以白底为道路色,宽度5mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹行进的智能寻迹机器小车。 三、软硬件设计方案 1、硬件部分 可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块。 1.1、单片机模块 单片机模块为小车运行的核心部件,起控制小车的所有运行状态的作用。本次小车的设计我们小组采用的是ATMEL公司的STC89C52RC单片机。STC89C52RC是一种低损耗、高性能、CMOS八位微处理器,片有4k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。其程序和数据存储是分开的。 STC89C52RC单片机介绍:
智能小车实训报告 摘要: 本课题是基于AT89C52单片机的智能小车的设计与实现,小车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。小车系统以 AT89S52 单片机为系统控制处理器; 采用红外传感获取赛道的信息,来对小车的方向和速度进行控制。此外,对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合,实现小车的预期功能。 一、实验目的: 通过设计进一步掌握51单片机的应用,特别是在嵌入式系统中的应用。进一步学习51单片机在系统中的控制功能,能够合理设计单片机的外围电路,并使之与单片机构成整个系统。 二、设计方案 该智能车采用红外传感器对赛道进行道路检测,单片机根据采集到的信号的不同状态判断小车当前状态,通过电机驱动芯片L298N 发出控制命令,控制电机的工作状态以实现对小车姿态的控制。 三.报告内容安排 本技术报告主要分为三个部分。第一部分是对整个系统实现方法的一个概要说明,主要内容是对整个技术原理的概述;第二部分是对硬件电路设计的说明,主要介绍系统传感器的设计及其他硬件电路的设计原理等;第三部分是对系统软件设计部分的说明,主要内容是智
能模型车设计中主要用到的控制理论、算法说明及代码设计介绍等。 技术方案概要说明 本模型车的电路系统包括电源管理模块、单片机模块、传感器模块、电机驱动模块。 工作原理: 利用红外采集模块中的红外发射接收对管检测路面上的轨迹 将轨迹信息送到单片机 单片机采用模糊推理求出转向的角度,然后去控制 行走部分 最终完成智能小车可以按照路面上的轨迹运行。 硬件电路的设计 1、最小系统: 小车采用atmel公司的AT89C52单片机作为控制芯片,图1是其最小系统电路。主要包括:时钟电路、电源电路、复位电路。 其中各个部分的功能如下: 1、时钟电路:给单片机提供一个外接的16MHz的石英晶振。 2、电源电路:给单片机提供5V电源。 3、复位电路:在电压达到正常值时给单片机一个复位信号。
哈理工版本电子实习报告智能循迹小车制作 文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]
电子实习报告学院:计算机科学与技术 专业班级:计算机11-5 学生姓名:陈秀秀 学号: 指导教师:沈永滨 完成时间: 成绩: 一. (1 (2 (3 二. 给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。 1)行驶直线的控制:利用红外传感器的左右最外端俩个探头检测黑线,全白说明在道中间,没有偏离轨道,走直线;一旦右侧探管检测到黑线,说明小车外侧探
头已跑出轨道,让车左拐;同理一旦左侧检测到黑线,说明左测探头已经出线,执行右拐命令。 2)拐直角弯的控制:当车前探头检测到黑线,执行直走,让车中心探头去检测,一旦车中心探头检测到黑线开始左拐,直到车位探头检测到跳出左拐命令,继续开始执行循迹,通过设置车中间探头与车尾探头的间距,便可以实现拐弯的角度,进而顺利入弯。 注意事项: 焊接顺序,先贴片后插件。 芯片及其它元件正方向: 芯片:有小圆点的一端为正方向标志; 电解电容:引脚较长的一端为正,带白色阴影的一端为负,在PCB上表现为有阴影的一端为负,空白的一端为正; LED:有绿线或绿点的一端为反向端,在PCB板上表现为有尖的一端; 二极管:有黑线的一端为反向端; 三.实习的具体实现 1.系统概述 小车的硬件主要包括51单片机最小系统以及3大模块:即电源模块、电机驱动模块、红外循迹模块。 系统工作框图如下: 2.单元电路设计与分析(原理图及器件安装图附后) 1)电源模块 供电系统的原理图如下
作为动力电源。7805与7806要公地。 2)电机驱动模块 驱动芯片比较常见的是15脚Multiwatt封装的L298N,内部包含4通道逻辑驱动电路。可以方便的驱动两个直流电机,或一个两相步进电机。 L298内部的原理图如下: OUT1与OUT2与小车的一个电机的正负极相连,OUT3与OUT4与小车的另一个电机的正负极相连,单片机通过控制IN1与IN2,IN3与IN4分别控制电机的正反转。ENA与ENB分别控制两个电机的使能。 L298控制表 注意:X表示状态不定L298有两路电源分别为逻辑电源和动力电源, 6V为逻辑电源, 12V为动力电源。J4接入逻辑电源,J6接入动力电源,J1与J2分别为单片机控制两个电机的输入端,J3与J5分别与两个电机的正负极相连。ENA与ENB直接接入6V逻辑电源也就是说两个电机时刻都工作在使能状态,控制电机的运行状态只有通过J1与J2两个接口。由于我们使用的电机是线圈式的,在从运行状态突然转换到停止状态和从
DIY 达人赛 基于STC89C52 单片机智能寻迹小车 实 验 报 告 参赛队伍: 队员: 2014 年 4 月
一、引言 我们所处的这个时代是信息革命的时代,各种新技术、新思想层出不穷,纵观世界范围内智能汽车技术的发展,每一次新的进步无不是受新技术新思想的推动。随着汽车工业的迅速发展,传统的汽车的发展逐渐趋于饱和。伴随着电子技术和嵌入式技术的迅猛发展,这使得汽车日渐走向智能化。智能汽车由原先的驾驶更加简单更加安全更加舒适,逐渐的向智能驾驶系统方向发展。智能驾驶系统相当于智能机器人,能代替人驾驶汽车。它主要是通过安装在前后保险杠及两侧的红外线摄像机,对汽车前后左右一定区域进行不停地扫描和监视。计算机、电子地图和光化学传感器等对红外线摄像机传来的信号进行分析计算,并根据道路交通信息管理系统传来的交通信息,代替人的大脑发出指令,指挥执行系统操作汽车。 1、来源汽车的智能化是21 世纪汽车产业的核心竞争力之一。汽车的智能化是以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的科技。 2、智能汽车国外发展情况 从20 世纪70 年代开始,美国、英国、德国等发达国家开始进行无人驾驶汽车的研究,目前在可行性和实用化方面都取得了突破性的进展。目前日本、欧美已有企业取得实用化成果。与国外相比,国内在智能车辆方面的研究起步较晚,规模较小,开展这方面研究工作的单位主要是一些大学和研究所,如国防科技大学、清华大学、吉林大学、北京理工大学、长安大学、沈阳自动化所等。我国从20 世纪80 年代开始进行无人驾驶汽车的研究,国防科技大学在1992 年成功研制出我国第一辆真正意义上的无人驾驶汽车。先后研制出四代无人驾驶汽车。第四代全自主无人驾驶汽车于2000 年 6 月在长沙市绕城高速公路上进行了全自主无人驾驶试验,试验最高时速达到75.6Km/h。 3、我们的小车 我们做的是基于STC 8 9 C52单片机开发,主要是研究3轮小车的路径识别及其遥 控运动。
单片机实习报告_简易智能小车
指导老师:李勇波 日期:2011年7月 中国地质大学(武汉 ) 单片机实习报告
班级:073092-15 | 姓名:赵英俊(20091002410) 简易智能小车报告 摘要 本小车以Atmel公司生产的AT89S52为核心,完成寻迹、避障、光源检测和车速测量等功能。在机械结构上,对普通的小车进行了改造,即用一个万向轮来代替两个前轮,是小车的转向更加灵敏。采用PWM驱动芯片控制电机,红外传感器检测白线、障碍物以及用来测量速度,光敏器件检测光强。基于可靠的硬件设计和稳定的软件算法,基本实现题目要求。 关键字:STC89C52 寻迹光源检测避障测速测量 Abstract This design is controlled with the MCU (AT89S52) to complete the function of finding trace,avoiding barrier,tending to light and measure speed. In the mechanical structure, about the car, the reform which is a universal wheel instead of two front, the more sensitive to the car. Using PWM motor drive chip control, infrared sensor detection white line, obstacles and used to measure the speed, photodetector detection light intensity. Based on reliable hardware design and stable software algorithm, basically realize the topic request. Key words: STC89C52 trace avoiding barrier tending to light measure speed 1.系统设计 1.1 设计要求 1. 基本要求 (1)小车从起跑线出发(不得超过起跑线),沿引导线到达B点 在B点有一障碍物需绕过障碍物到达C点 (2)小车到达C点沿一段直到到达D点后进入“弯道区”(中间有一断点),此时有一光源照射,引导小车转弯并通过断
宜宾职业技术学院 《单片机系统设计》 项目设计报告 项目设计题目:智能寻迹小车 系部:电子信息与控制工程系班级:电子XXXX 班组号:第四组 小组成员:XXX 指导教师:XXX 2017年10月10日
目录 一、引言 (3) 二、方案论证 (4) 三、小车车体设计 (7) 四、硬件系统设计 (8) 1、单片机最小系统 (8) 2、循迹电路 (9) 3、电机驱动电路 (9) 五、软件系统设计 (12) 六、系统的制作、仿真与调试 (14) 七、总结 (15)
一、引言 当今世界,传感器技术和自动控制技术正在飞速发展,机械、电气和电子信息已经不再明显分家,自动控制在工业领域中的地位已经越来越重要,“智能”这个词也已经成为了热门词汇。现在国外的自动控制和传感器技术已经达到了很高的水平,特别是日本,比如日本本田制作的机器人,其仿人双足行走已经做得十分逼真,而且具有一定的学习能力,还据说其智商已达到6岁儿童的水平。作为机械行业的代表产品—汽车,其与电子信息产业的融合速度也显著提高,呈现出两个明显的特点:一是电子装置占汽车整车(特别是轿车)的价值量比例逐步提高,汽车将由以机械产品为主向高级的机电一体化方向发展,汽车电子产业也很有可能成为依托整车制造业和用车提升配置而快速成为新的增长点;二是汽车开始向电子化、多媒体化和智能化方向发展,使其不仅作为一种代步工具、同时能具有交通、娱乐、办公和通讯等多种功能。无容置疑,机电一体化人才的培养不论是在国外还是国内,都开始重视起来,主要表现在大学生的各种大型的创新比赛,比如:亚洲广播电视联盟亚太地区机器人大赛(ABU ROBCON)、全国大学生“飞思卡尔”杯智能汽车竞赛等众多重要竞赛都能很好的培养大学生对于机电一体化的兴趣与强化机电一体化的相关知识。但很现实的状况是,国内不论是在机械还是电气领域,与国外的差距还是很明显的,所以作为电子专业学生,必须加倍努力,为逐步赶上国外先进水平并超过之而努力。为了适应机电一体化的发展在汽车智能化方向的发展要求,提出简易智能小车的构想,目的在于:通过独立设计并制作一辆具有简单智能化的简易小车,获得项目整体设计的能力,并掌握多通道多样化传感器综合控制的方法。所以立“智能循迹小车”一题作为尝试。此项设计是在以小为基础,采用AT89C52单片机作为控制核心,实现能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。
电子实习报告智能循迹 小车 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
电子实习报告 学院:电气学院 专业班级: 学生姓名: 指导教师: 完成时间: 2014/8/29 成绩:
目录 一、设计要求及注意事项 (2) 二、设计的作用、目的 (2) 三、设计的具体实现 (2) 1.系统概述 (2) 2.单元电路设计(或仿真)与分析 (3) (1)电源模 块 (3) (2)电机驱动模块 (4) (3)简易控制模块 (6) (4)红外循迹模 块 (7) 3.电路的安装与调试 (8) (1)安装 (8) (2)调试 (10) 四、心得体会,存在的问题和进一步改进的意见 (11) 五、附录 (11) 1.元件说明 (11)
(1)电阻 (11) (2)电解电容 (11) (3)LED (12) (4)芯片 (12)
电子实习报告 一、设计要求及注意事项 1.能独立完成设计内容并完全掌握其内部结构、工作原理和安装调试过程。 2.要求在设计过程中能熟练掌握其元器件的计算、焊接技术和电路故障的判别方法。 3.焊接顺序,先贴片后插件。 4.要求焊接的电路板调试时正常且安装好小车后能正常运行。 5.进入实习基地后按指定的实验台就位,未经许可,不得擅自挪换仪器设备。 6.要爱护仪器设备及其它公物,凡违反操作规程,不听从教师指导而损坏者,按规定赔偿。 7.未经指导教师许可,不得做规定以外的实验项目。 8.要保持实习室的整洁和安静,不准大声喧哗,不准随地吐痰,不准乱丢纸屑及杂物。 9. 必须严格按设备操作书的要求去使用设备,注意人身及设备安全,不要盲目操作。 二、设计的作用、目的 1.利用所学过的基础知识,通过本次电子实习培养独立解决实际问题的能力;2.巩固本课程所学的理论知识和实验技能; 3.掌握常用电子电路的一般设计方法,提高设计能力和实验、动手能力,为今后从事电子电路的设计、研制电子产品打下基础。 4.熟练掌握焊接机能、电子元器件的识别。 5.了解智能循迹小车构成的设计方法。
电子信息专业实验报告 课程电子信息系统综合设计实验MCU部分实验题目智能机器小车设计实验总分 学生姓名学号 学生姓名学号 学生姓名学号 实验时间地点分组 电子信息学院专业实验中心
目录 一、摘要 二、题目要求 三、软硬件设计方案 四、各部分电路的作用及电路工作原理分析 五、系统调试与实验结果 六、实验结果 七、拓展功能 八、参考资料 九、附录 一、摘要 摘要:智能循迹小车主要由单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。本次设计我们采用STC89C52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够识别黑白两色路面,电机模块由L293D芯片和两个减速直流电机构成,组成了智能车的动力系统,电源采用7.2V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。 关键词智能小车 STC89C52单片机 L293D芯片红外光对管 二、题目要求 “智能寻迹机器小车设计”,要求采用MCS-51单片机为控制芯片,设计出一个能够识别并沿着以白底为道路色,宽度5mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹行进的智能寻迹机器小车。 三、软硬件设计方案 1、硬件部分 可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块。 1.1、单片机模块 单片机模块为小车运行的核心部件,起控制小车的所有运行状态的作用。本次小车的设计我们小组采用的是ATMEL公司的STC89C52RC单片机。STC89C52RC是一种低损耗、高性能、CMOS八位微处理器,片内有4k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。其程序和数据存储是分开的。 STC89C52RC单片机介绍: