BUCK 电路的环路计算,补偿和仿真
Xia Jun 2010-8-14 本示例从简单的BUCK 电路入手,详细说明了如何进行电源环路的计算和补偿,并通过saber 仿真验证环路补偿的合理性。
一直以来,环路的计算和补偿都是开关电源领域的“难点”,很多做开关电源研发的工程师要么对环路一无所知,要么是朦朦胧胧,在产品的开发过程中,通过简单的调试来确定环路补偿参数。而这种在实验室里调试出来的参数真的能满足各种实际的使用情况吗?能保证电源产品在高低温的情况下,在各种负载条件下,环路都能够稳定吗?能保证在负载跳变的情况下收敛吗?
太多的未知数,这是产品开发的大忌。我们必须明明白白的知道,环路的稳定性如何?相位裕量是多少?增益裕量是多少?高低温情况下这些值又会如何变化?在一些对动态要求非常严格的场合,我们如何折中考虑环路稳定性和动态响应之间的关系?
有的放矢,通过明确的计算和仿真,我们的产品设计才是科学的,合理的,可靠的。我们的目标是让产品经得起市场的检验,让客户满意,让自己放心。
一切从闭环系统的稳定性说起,在自动控制理论中,根据乃奎斯特环路稳定性判据,如果负反馈系统在穿越频率点的相移为180°,那么整个闭环系统是不稳定的。
很多人可能对这句话很难理解,虽然自动控制理论几乎是所有大学工科学生的必修课,可大部分是是抱着应付的态度的,学完就忘了。
那就再给大家讲解一下吧。
等式:V out=[Vin-V out*H(S)]*G(S)
公式:Vout Vin G S ()1G S ()H S ()?+
G(S)/(1+G(S)*H(S))就称之为系统的闭环传递函数,如果1+G(S)*H(S)=0,那么闭环系统的输出值将会无限大,此时闭环系统是不收敛的,也即是不稳定的。
G(S)*H(S)是系统的开环传递函数,当G(S)*H(S)=-1时,以S=j ω带入,即获得开环系统的频域响应为G(j ω)*H(j ω)=-1,此时频率响应的增益和相角分别为:
gain =‖-1‖=1
angle=tan -1(0/-1)=180°
从上面的分析可以看出,如果扰动信号经过G(S)和H(S)后,模不变,相位改变180°,那么这个闭环系统就是不稳定的。
但是,别忘了,这是负反馈系统,信号经过H(S)之后,本身就有180°的相移,所以,针对负反馈的闭环系统而言,其描述为:如果扰动信号经过系统主电路和反馈系统之后,其模不变,相位也不变,那么这个系统是不稳定的。为什么相位也不变?因为G(S)*H(S)造成的180°相移和负反馈本身造成的180°相移,两者叠加之后是360°,所以等于相位不变。
什么是穿越频率?
G(S)*H(S)对应的增益为1(即幅值不变)的频率即为穿越频率。换算为dB 单位:20log1=0dB 。
理论上来说,在穿越频率点上,只要相移不是180°,那么系统就是稳定的。但是由于模拟系统的离散性(即所有器件的特性都不是固定不变的,随时间和温度在不断的变化),如果相移很接近180°,这时闭环系统是条件稳定的,即有可能进入不稳定状态。所以为了避免这种情况,要求在穿越频率点上,开环传递函数G(S)*H(S)的相移应该与180°保持足够的裕量。这个裕量选取多少比较合适呢?目前在工程应用上通常选取45°,即要求传递函数G(S)*H(S)的相移应该小于135°,这是兼顾考虑环路稳定性和动态响应速度的折中值,理论上来说裕量越大越好,但过大的相位裕量会导致动态响应变慢(过阻尼特性)。
为了保证足够的相位裕量,我们希望开环传递函数的增益曲线以-1的斜率穿越0dB线。如果开环传递函数的增益曲线在穿越频率点的斜率为-2,那么意味着有接近180°的相移,这将导致相位裕量明显不足,而如果斜率为-1,那么通常意味着相位有45°以上的裕量。
增益曲线的斜率是如何来的?主电路或反馈补偿电路中,每产生一个极点,开环传递函数的增益曲线斜率在该极点的转折频率点上就会增加-1,相反的,每产生一个零点,开环传递函数的增益曲线斜率在该零点的转折频率点上就会增加+1。
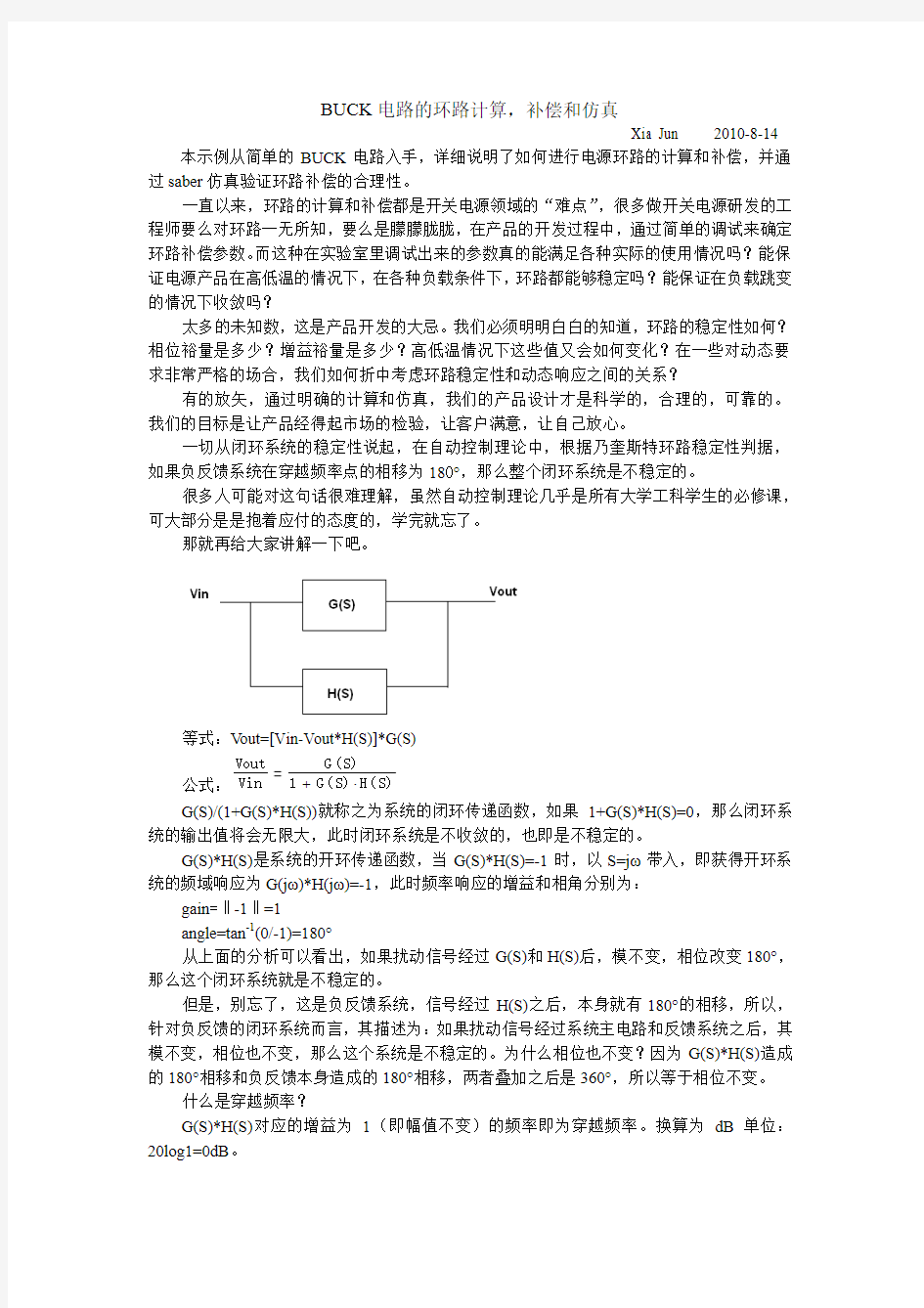
不同斜率下的相位裕量如下图所示:
从上图可以看出,如果开环传递函数以-2的斜率穿越0dB线,那么相移接近180°,如果以-1的斜率穿越0dB线,那么相移接近90°。
从上图也可以看出,如果两者的穿越频率(fc)相同,那么在0Hz频率点上,-2斜率下降的开环传递函数的增益远远大于-1斜率下降的开环传递函数,这有什么意义呢?这就是静态增益,决定了输出值与给定值之间的静态误差。假如给定值是10V,希望输出也是10V,以-1斜率下降的开环传递函数的静态增益是20dB,以-2斜率下降的开环传递函数的静态增益是40dB,两者的输出静态误差分别为:10V*(1/10)=1V,10V*(1/100)=0.1V,可见静态误差相差是多么巨大!所以,我们期望静态增益越大越好。
除此之外,开环传递函数的斜率还对动态响应有巨大影响。假如穿越频率fc依然相同,一个开环传递函数的斜率为-1,另外一个为-2,负载从90%突然跳变到10%,那么此时的输出电压必然会从一个稳态值变化到另外一个稳态值,这中间的暂态过程称之为动态响应。对动态响应影响最大的是穿越频率fc,我们希望fc越大越好,当然为了避免开关频率对控制环路的影响,fc必须远小于开关频率,一般取fc小于1/6的开关频率,一般的开关电源对于动态响应要求并不十分苛刻,通常fc都小于开关频率的1/10。那么开环传递函数的斜率对于动态响应有什么影响呢?
如下图所示:
从上图我们看到,开环传递函数斜率为-2的情况下,输出电压呈现明显的欠阻尼振荡,输出电压快速达到下一个稳态值并过冲,随后围绕稳态值阻尼振荡。开环传递函数斜率为-1的情况下,输出电压呈现明显的过阻尼特性,从一个稳态值缓慢的变化到下一个稳态值。
过阻尼的缓慢变化和欠阻尼的多次振荡都不是我们想要的情况,我们希望动态发生时,输出能够快速变化到稳定值,同时又不会产生反复的震荡。
那么我们可以结合上面的两种情况,对开环传递函数的斜率做出适当的变化,以达到较快的动态响应速度。如下图所示:
从上图可以看出,在(1/2)fc频率处,开环传递函数的斜率由-2变成-1,可以达到较快的动态响应,由于传递函数以-1的效率穿越0dB线,也可以获得足够的相位裕量。同时由于从0Hz~(1/2)fc之间,开环传递函数以-2斜率衰减,可以获得很高的静态增益,从而使得静态误差非常的小。
在这里需要说明的是,考核相位裕量,只需在穿越频率点的相位裕量足够就可以了,在fc之前的相位裕量不必严格满足裕量要求。
通过上面的分析,我们已经对环路稳定性,相位裕量,动态响应有了初步的了解,下面我们就要进入实例,来初步理解如何进行环路补偿的计算和仿真。
还是从最简单的拓扑——buck电路入手吧。
CCM情况下控制(占空比d)到输出(电压V o)的小信号传递函数:
这个公式是怎么来的?
大多数的教材上都有推导过程,我们不需要知道如何去推导主电路的传递函数,这些已经被研究的很透彻了,我们只需要拿过来用就可以了。在此推荐一下张兴柱博士的公司网站:https://www.doczj.com/doc/3b1661162.html,,张老师已经把常用拓扑的传递函数都推导出来并放在网站上面了。
下面开始计算,mathcad,不会用的请举手,同志们,时代在进步,要跟上潮流啊!
做简单的设定,输入Vg=20V,占空比0.5,输出10V,负载电阻1?,其他设定如下:
这是一个典型的低通滤波器,低频时增益保持不变,在LC产生的双极点处(频率为1.16kHz),增益曲线以-2的斜率衰减,在电解电容的ESR产生的零点处(频率为4.5kHz),增益曲线的斜率由-2变成-1。那么相位的变化情况如何呢?
看起来还不错,电容ESR引起的零点部分抵消了LC双极点导致的相移,使得在穿越频率点上还保持足够的相位裕量:
从上面的计算中,可以获得主电路传递函数G(S)的穿越频率为7.2kHz,相位裕量为62.4°。看来我们不需要做补偿啊,穿越频率够大,在穿越频率点上传递函数增益曲线的斜率为-1,相位裕量也大于45°,只要让H(S)=1就可以保证开环传递函数G(S)*H(S)获得足够的相位裕量。可是,静态增益实在太低了,只有26dB,我们要消除静态误差,就必须使得增益曲线从0Hz开始就以-1或-2的斜率下降,补偿是不可避免的。
下面就几种典型的补偿方式做一下介绍:
1. 单极点补偿
3. 单零单极补偿
5. 单零双极补偿
6. 双零双极补偿
根据以上的各种补偿电路,我们应该选择哪一个呢?
为了提高静态增益,我们需要在原点处产生一个极点,所以如果要做最简单的补偿,我们应
该采用单零单极补偿电路。
假如我们希望开环传递函数G(S)*H(S)的穿越频率为10kHz,而前面计算的G(S)的穿越频率为7.2kHz,那么H(S)将把整体的穿越频率往后推延2.8kHz。
H(S)由两部分组成,一部分是我们需要设计的补偿环节K(S),另一部分是PWM的调制比,
即占空比与调制锯齿波电压幅值之间的比例,称之为Fm,如下图所示:
当V E=V P时,占空比为1,所以Fm=1/V P。
H(S)=K(S)*Fm,所以开环传递函数为:G(S)*K(S)*Fm。
K(S)*Fm在10kHz频率点的增益为20log(R2*Fm/R1),而G(S)在10kHz频率点的增益为:
,即-3.573dB。
所以有:20log(R2*Fm/R1)=3.573
假定V P=5V。
设定反馈分压电阻为Rf1=3k?,Rf2=1k?,如下图所示:
在小信号分析时,运放的正极接地,由于运放正负极之间的虚短特性,运放的负极等效于接地,此时R f2被短接,R f1即为补偿网络的电阻R1,即R1=3k?。
据此可以求出:
R2=22.6 k?
希望补偿电路的零点频率为1/2fc,即
可求出C1=4.425nF,取标准值4.7nF。
计算完成之后,让我们来看看补偿的效果吧:
根据计算结果,穿越频率为10.08kHz,相位裕量为60.6°。
OK,计算完成了,结果是相当完美的,完全达到了我们的设计要求,那么仿真的情况会如何呢?会与计算吻合吗?
下面就让我们通过saber的环路仿真来体验一下环路测试的效果吧。
不幸的是,我还无法实现闭环仿真来验证开环传递函数G(S)*H(S)的增益和相位曲线,幸运的是,开环仿真还是可以进行的,我们可以分别对Fm*G(S)和K(S)进行开环仿真,与计算
结果进行对比和相互验证。
要实现频域的环路仿真,就必须用到saber中的环路扫描仪tdsa,它能够向环路注入频率可变的正弦波信号,通过测试反馈信号,获得两者之间的增益和相位关系。
一共有5个脚需要连接相关的信号线,其中ON/OFF是tdsa的使能引脚,通过接入一个logic clock就可以实现tdsa何时开始扫描,可是停止。Input(measure)的+-线分别接入需要测量的回馈信号的正负引脚,output(source)的+-线分别接入信号注入点的正负引脚。
需要设置的属性,
fbegin:扫描起始频率
fend:扫描截止频率
ampl:注入信号的幅值(信号是以0为轴的正弦波)
npoints:从fbegin到fend总共需要扫描的频率点数
max_err:最大误差系数
mode:频率扫描执行的类型
max_nper:每个频点允许扫描的最大周期数
min_nper:每个频点允许扫描的最小周期数
min_tspp:每个扫描周期中允许的最少时间步进数
filter:选择是否需要对输入信号进行滤波
a0:滤波器的增益
f0:滤波器的品质因素
以上参数需要特别设置,其他的参数则不需改变。那么以上这些参数应该如何进行设置呢?分别代表什么意思?
我们要测试开环特性,首先要向环路中的某一点注入频率连续变化的扰动信号,然后在环路的另一点上测量回馈信号,通过对比两者的幅值和相位差就可以获得一定频段内注入点和反馈点之间增益曲线和相位曲线。
那么通过source端向环路中的某一点注入频率连续变化的正弦波电压信号,其幅值就是ampl,一般设置为0.1V即可,如果想测量准确,也可设置的大一点。
注入信号频率变化的范围由fbegin和fend决定,假如说我们想测量100Hz~100kHz之间的开环特性,那么选择fbegin为100,fend为100k。
Tdsa如何扫描呢?即如何实现频率连续变化的信号注入呢?实际上频率是不可能连续变化的,注入的信号还是离散的,即从一个频点间隔的跳到下一个频点,扫描的频点越多,间隔越小,测试结果的准确性越高。在参数栏中,mode和npoints两个参数决定了扫描的频率间隔形式,mode为扫描形式,npoints为总共需要扫描的频点数。Mode有三个可选项:linswp,logswp,rlogswp。Linswp就是线性扫描,假定扫描频率从100Hz~100kHz,npoints为1000,那么从100Hz~100kHz总共有99.9kHz的频谱宽度,每个频点间隔为99.9kHz / 1000=99.9Hz,注入信号的频率为100Hz,199.9Hz,299.8Hz,399.7Hz…100kHz。logswp就是以对数间隔的方式进行扫描,100kHz / 100Hz=1000,log1000=3,那么注入的信号频率为100Hz,100Hz*103/1000, 100Hz*103*2/1000, 100Hz*103*3/1000…100Hz*103*1000/1000。至于rlogswp,我也没搞清楚是如何设置的,大家有时间可以自己研究一下tdsa的使用说明书。对于两种扫描方式,虽然总的频点数一样,但是linswp方式下频点之间的间隔是固定的,而logswp方式下,刚开始时频点之间的间隔很小,越往后频点间隔越大。
另外的几个关键参数都跟仿真的精度相关,首先是max_err,即最大误差系数,在某一个频率点上,tdsa向环路连续注入扰动信号,然后测量回馈的信号,对比增益和相位的变化,直到获得稳定的值。如何判断是否达到稳定?即由max_err决定,将前面三个注入信号和回馈信号的增益和相移取平均值,与当前注入信号和回馈信号的增益和相移对比,如果误差在max_err限定的范围之内,即认为已达稳定状态,可以进行下一个频点的扫描。
Max_nper是在同一个频点上允许扫描的最大周期数,假如在同一个频点上扫描多次还没有达到max_err限定的误差范围,而反复的扫描可能导致仿真周期变得很漫长,或者在某个频点上由于电路某些参数设置不可能,根本就无法获得稳定值,那么这时候就需要跳过这个频点,进入下一个频点进行扫描,max_nper即是允许tdsa在同一个频点扫描的最大次数,一旦达到这个次数,即使还没有达到max_err限定的误差范围,也直接跳过这个频点,进入下一个频点。
Min_nper,这是与max_nper对应的,即在同一个频点最少要扫描的次数,一般取大于3 Min_tspp,设定每一个扫描周期中的最小时间步进数,假如在频点10kHz,扫描一个周期是100uS,那么希望100uS的正弦波尽量准确,就希望分段输入的波形光滑一些,所以需要设定这段正弦波被分割的最少片段数,这个值设定的越大,波形越光滑,测得的相位越准确。Filter,即是否要对tdsa的输入(input)信号进行滤波,默认是要滤波的,因为里面含有高频开关纹波以及一些其他高次谐波,并不是我们环路扫描所需要的。
a0,滤波器的增益。
p0,滤波器的品质因素,滤波器的带宽由f0/p0,假如扫描频点为10kHz,p0为10,那么滤波器的带宽为1kHz,即在input端将把9.5kHz~10.5kHz以外的信号滤掉。
以上参数解释完成之后,让我们来看一下实际的开环仿真电路吧。
为了开环仿真的需要,我们把K(S)和Fm之间的连接断开,即K(S)的输出不再作为Fm的给定,而是通过在PWM生成比较器的正端直接输入一个固定的电压,从而获得一个固定的占空,在本案例中,由于PWM的基波——锯齿波的幅值为5V,为了获得50%的占空比,我们给定一个2.5V电压,如下图所示:
在2.5V给定电压上面,将tdsa的输出端(ouput)信号叠加上去,即为注入的扰动信号,将输出端电解电容的电压接入tdsa的输入端(input),即为回馈电压信号。注入扰动信号使用的是voltage summer这个器件,它能够把参考地相同的两个电压信号相互叠加。
图中的运放选择理想运放,在器件搜索栏中输入op amp,在列表中选择op amp,level 1这个器件添加到原理中。比较器选择逻辑输出比较器,在器件搜索栏中输入comparator,在列表中选择comparator,ideal logic out添加到原理图中。两个电解电容属性栏中的esr分别设置为0.075,电感属性r设置为0.01。
设置tdsa和logic clock参数如下:
Tdsa的使能信号使用logic clock,设置为:freq为1,duty为1,td为10ms,即频率为1,占空比为1,延时10ms。为什么延时10ms才使能tdsa?因为仿真开始时有个暂态振荡的过程,这是我们不想要的,所以需要避开这段时间。
Tdsa的参数如上图所示,起始频率从500Hz开始,因为如果起始频率低,仿真太耗时间,一个100Hz的频率信号,周期是10ms,如果在该频点上扫描10个周期,时间就是100ms,而为了仿真这100ms的运行周期,仿真程序可能要耗时几分钟,如此下来,仿真整个频段,可能需要几个小时的时间。所以起始频点设置的大一点,仿真耗时将大大减小。但是要考虑穿越频率的位置,起始频率必须小于穿越频率,否则环路扫描就没有意义了,因为你测不到穿越频率和相关的相位裕量。在本案例中,估计穿越频率在几kHz,所以设置起始频率500Hz,截止频率20kHz。
设置完成之后,运行operating point/transient,进行参数设置,end time输入1.2。为什么是1.2s?其实这个结束时间越大越好,因为需要完成所有的频点扫描(共400个频点),扫描的周期是比较长的,如果end time不够的话,扫描就停止在end time时间点上,不能完成整个频段的扫描。比如我们估计一下,完成所有的频点扫描共需要3s,那么我们输入10,进行仿真,并不是说仿真程序会在end time达到10s时才结束,而是在tdsa完成所有扫描之后自动结束,即完成20kHz频点的扫描后自动结束仿真程序。在本案例中,估计完成所有的频点扫描,周期在1s以内,所以这里输入1.2。
由于开关的上升时间和下降时间分别设定为200ns,所以time step设置为200n,min time step 设置为199n,max time step设置为400n,这样仿真速度会稍微快一些。
设置完成之后,点击ok,仿真程序开始运行。
仿真运行以后,点击右上角的cmd图标,可以观察仿真程序目前的进度,如上图所示,在仿真进行到10ms时,tdsa启动,开始扫描第一个频点500Hz。
如上图所示,仿真进度在90.81%时被tdsa结束,此时tdsa的所有频点扫描均已完成。
随后弹出cosmoscope仿真结果界面:
在signal manager窗口点击open plotfiles框,弹出文件选择框,选择我们此次的目标文件,其后辍为 _tdsa,前面的test_23.ac为我们仿真文件的ac仿真结果,具体的取决于文件名。在弹出的窗口中,双击AC_result,即可获得我们想要的增益曲线和相位曲线:
测量穿越频率约为2.68kHz,相移约为133.4°。
那么,我们的计算结果如何呢?请看下面的结果:
结算结果显示,G(S)*Fm的穿越频率是2.733kHz,相移是135.1°。至此,计算和仿真的结果完全吻合。是不是有一种豁然开朗的感觉?下面,我们再来仿真一下补偿环节K(S)的相位曲线和增益曲线吧。
由于仅仅仿真补偿环节的传递函数,所以不需要主电路部分,我们把它去掉,在反馈分压电阻的输入端给定一个10V电压源,然后在这个电压源上叠加tdsa的输出信号output。
此处tdsa的属性设定要做更改,ampl更改为0.01,因为补偿电路是个信号放大环节,所以注入的信号要非常的小,否则运放输出将会超过其供电电压范围。
仿真结果如下:
在10kHz频点,补偿电路的增益为17.5dB,相移为170.9°。
下面通过mathcad计算补偿电路的增益曲线和相位曲线:
经过上面的计算和仿真,我们可以看到,无论是G(S)*Fm还是K(S),计算和仿真的结果都是一致的,那么对于G(S)*Fm*K(S),虽然我们没有做仿真来验证,却可以确定,仿真的结果与计算结果必然吻合。
计算和仿真完成之后,让我们再来看一下闭环时的负载动态效果吧。
这里我们需要用到一个动态电阻来模拟负载动态,在器件搜中栏中输入resistor,选择resistor,PWL添加到原理图,设置属性如下:
打开属性栏,设置pwl属性如上图所示,意思是0~5ms内阻值为1?,在5ms~5.01ms之内从1?变化到10?,即相当于负载电流在10us内从10A变化到1A,模拟的负载电流变化率约为0.9A/us,负载从100%变化到10%。
点击确定,运行operationg point/transient仿真,end time设置为10ms,因为不做tdsa仿真(tdsa 器件已经删除,运放输出作为PWM比较器的正向输入,系统闭环),10ms的仿真周期就足够了,负载在5ms时发生突变。
仿真结果如下:
输出电压从一个稳态工作点到达下一个稳态工作点,需要大约0.6ms的时间,电压过冲幅度为0.3V,其后快速回落,并经轻微的震荡后达到稳态工作点2。
从仿真可以看出,动态响应速度很快,过冲小,振荡少,完全能够满足要求。
至此,关于buck电路在CCM模式下的电压控制方式环路补偿设计,通过计算和仿真获得了非常清晰的结果,通过这个案例,让大家明确环路补偿设计的方法和流程,让大家拨去心头的迷雾,明明白白的设计我们的产品。
电源控制模块 回顾我们在学校学习过的控制理论知识便知,所有控制系统均可以通过传输函数模块得到简化。峰值电流模式控制电源转换器中的电压控制环路也不例外。电压环路(TV(f)) 可以简化表示为不同传输模块的积(请参见图1)。首先是功率级控制输出传输函数(GCO(f)),其表示为输出电压变化(?VOUT) 与控制电压变化(?VC) 的比。请注意,该模块实际为脉宽调制(PWM) 调制器增益(K) 和电源输出滤波器增益(GF(f)) 的组合。其次通常为控制传输函数(GC(f)) 的输出有时称作补偿传输函数,可以表示为?VC与?VOUT 变化的比。如果使用了光隔离器,则也会有一个传输函数模块GOPTO(f),其位于模块K 和–GC(f) 模块之间的连线上。 图1 简化后的电源电压环路模块结构图 图 2 显示了一个峰值电流模式控制正向转换器的功能示意图,如图 1 结构图所示。控制模块由一些虚线区分。
图2 简化后的电源电压环路结构图 起初,峰值电流模式控制背后的想法是控制通过功率级电感的平均电流,从而使它看起来像是一个去除了双极的电流源,而该双极出现在输出电容(COUT) 和功率级电感(LOUT) 的交互作用之间。图 3 显示了这种模型的控制结构图。
图3将电感建模为一个电流源的峰值电流模式控制 图 2 的简化控制输出传输(GCO(f)) 函数表示如下。其中,(a) 为变压器匝数比,而RLOAD 为转换器输出负载阻抗。COUT 为转换器输出滤波器电容,而RESR 为COUT 的等效串联电阻。由该控制输出传输函数,您会看到COUT 和RESR 交互作用之间有一个零点,并在RLOAD 和COUT 交互作用之间有一个极点。 随着时间的流逝,工程师在使用峰值电流模式控制时发现了一个大约在半开关频率(fs) 出现的GCO(f) 双极(fPP)。下列方程式描述了峰值电流模式正向转换器的GCO(f),包括fPP 的影响。请注意,如果您使用网络分析仪对正向转换器进行分析时,您会发现这种传输函数并没有精确地匹配模型描述情况。由于RESR 和COUT 交互作用出现的零位(FZCO) 随负载移动。fPP 出现在略微超出半开关频率时。在没有一个精确模型的情况下,您到底会如何对电压环路进行补偿呢?您可以循规蹈矩,遵循其他工程师已使用多年的老办法。也就是使用一个网络分析仪,根据测得的GCO(f) 来补偿电压环路,并遵循一些简单原则来获得稳定性(本文将有所介绍)。 斜率补偿 人们在峰值电流模式控制转换器中发现,存在占空比突然改变引起的次谐波振荡。这是因为由于控制电压(VC) 无法足够快地校正占空比改变,因而占空比改变便会导致平均输出电流(IOUT1, IOUT2) 误差。为对这一误差进行校正,人们设计了一种的被称作斜率补偿的方法。这种方法将三角电压波形添加到电流感应信号(V2=VSLOPE+VRSENSE),该信号强制平均输出电流不随占空比改变而变化。更多详情,请参见图4。
固定频率峰值电流模式PWM(Pulse WidthModulation)DC-DC变换器同传统的电压模式控制相比,具有瞬态响应好,输出精度高,带载能力强等优点,因而被广泛应用。作为重要的模拟单元,斜坡补偿电路和电流采样电路是电流模式PWM控制的根基,对电流模式控制中电流环路的稳定性起着重要作用。 1电路结构 图1所示是典型峰值电流模式PWM Boost DC-DC控制系统的结构框图。当电压外环的电压反馈信号经过误差放大器放大得到的误差信号VE送至PWM比较器后,将与电流内环的一个变化的、其峰值代表输出电感电流峰值的三角波或梯形尖角状合成波信号VE比较,从而得到PWM脉冲关断阈值。即: 在(1)式中:第一项为斜坡补偿部分,用于保证电流环路的稳定;第二项反映了电感电流的大小,通常由电流采样电路产生;第三项用于产生一个固定的基础电平,以为PWM比较器输入端图1典型峰值电流模式PWMBoostDC—DC控制系统框图提供一个合适的直流工作点。 因此,峰值电流模式控制不是用电压误差信号直接控制PWM脉冲宽
度,而是通过控制峰值输出端的电感电流大小,然后来间接地控制PWM 脉冲宽度。 但是,电流模式的结构决定了其应用时存在电流内环在占空比大于50%时的开环不稳定现象、亚谐波振荡、非理想的环路响应,以及容易受噪声影响等几个固有缺点。针对上述问题,在环路的补偿方式上,除了电压环路的RC串联补偿之外,还必须对电流环路进行补偿,以满足电流环路的稳定性要求。有效的解决方法是采用斜坡补偿技术,并在提高电流采样精度的同时降低采样损耗,以保证电流环路的稳定。 本文利用对振荡器充放电电容上的电压作V/I转换来得到稳定且斜率
环路相位-开关电源稳定性设计 专业技术 环路相位-开关电源稳定性设计 摘要:环路,相位,增益,负载,开关电源,稳定性,电压,相移,电源,频率, 信号接收机-基于单芯片的GPS接收机硬件设计白光调光-白光和彩色光智能照明系统解决方案设备方案-台达UPS在中小企业中的创新应用方案触摸屏电容-电容式触摸屏系统解决方案测量肺活量-利用高性能模拟器件简化便携式医疗设备设计测量温度-热敏电阻(NTC)的基本参数及其应用动能产品-动能电子企业文化活动丰富员工生活电路板镀锡-无锡华文默克发布PCB/SMT工艺方案引擎电压-采用接近传感器的火花探测器太阳能控制器-太阳能LED街灯的挑战及安森美半导体高能效解决方案众所周知,任何闭环系统在增益为单位增益l,且内部随频率变化的相移为360°时,该闭环控制系统都会存在不稳定的可能性。因此几乎所有的开关电源都有一个闭环反馈控制系统,从而能获得较好的性能。在负反馈系统中,控制放大器的连接方式 有意地引入了180°相移,如果反馈 众所周知,任何闭环系统在增益为单位增益l,且内部随频率变化的相移为360°时,该闭环控制系统都会存在不稳定的可能性。因此几乎所有的开关电源都有一个闭环反馈控制系统,从而能获得较好的性能。在负反馈系统中,控制放大器的连接方式有意地引入了180°相移,如果反馈的相位保持在180°以内,那么控制环路将总是稳定的。当然,在现实中这种情况是不会存在的,由于各种各样的开关延时和电抗引入了额外的相移,如果不采用适合的环路补偿,这类相移同样会导致开关电源的不稳定。 1 稳定性指标衡量开关电源稳定性的指标是相位裕度和增益裕度。相位裕度是指:增益降到0dB 时所对应的相位。增益裕度是指:相位为-180度时所对应的增益大小(实际是衰减)。在实际设计开关电源时,只在设计反激变换器时才考虑增益裕度,设计其它变换器时,一般不使用增益裕度。在开关电源设计中,相位裕度有两个相互独立作用:一是可以阻尼变换器在负载阶跃变化时出现的动态过程;另一个作用是当元器件参数发生变化时,仍然可以保证系统稳定。相位裕度只能用来保证“小信号稳定”。在负载阶跃变化时,电源不可避免要进入“大信号稳定”范围。工程中我们认为在室温和标准输入、正常负载条件下,环路的相位裕度要求大于45°。在各种参数变化和误差情况下,这个相位裕度足以确保系统稳定。如果负载变化或者输入电压范围变化非常大,考虑在所有负载和输入电压下环路和相
BUCK 电路的环路计算,补偿和仿真 Xia Jun 2010-8-14 本示例从简单的BUCK 电路入手,详细说明了如何进行电源环路的计算和补偿,并通过saber 仿真验证环路补偿的合理性。 一直以来,环路的计算和补偿都是开关电源领域的“难点”,很多做开关电源研发的工程师要么对环路一无所知,要么是朦朦胧胧,在产品的开发过程中,通过简单的调试来确定环路补偿参数。而这种在实验室里调试出来的参数真的能满足各种实际的使用情况吗?能保证电源产品在高低温的情况下,在各种负载条件下,环路都能够稳定吗?能保证在负载跳变的情况下收敛吗? 太多的未知数,这是产品开发的大忌。我们必须明明白白的知道,环路的稳定性如何?相位裕量是多少?增益裕量是多少?高低温情况下这些值又会如何变化?在一些对动态要求非常严格的场合,我们如何折中考虑环路稳定性和动态响应之间的关系? 有的放矢,通过明确的计算和仿真,我们的产品设计才是科学的,合理的,可靠的。我们的目标是让产品经得起市场的检验,让客户满意,让自己放心。 一切从闭环系统的稳定性说起,在自动控制理论中,根据乃奎斯特环路稳定性判据,如果负反馈系统在穿越频率点的相移为180°,那么整个闭环系统是不稳定的。 很多人可能对这句话很难理解,虽然自动控制理论几乎是所有大学工科学生的必修课,可大部分是是抱着应付的态度的,学完就忘了。 那就再给大家讲解一下吧。 等式:V out=[Vin-V out*H(S)]*G(S) 公式:Vout Vin G S ()1G S ()H S ()?+ G(S)/(1+G(S)*H(S))就称之为系统的闭环传递函数,如果1+G(S)*H(S)=0,那么闭环系统的输出值将会无限大,此时闭环系统是不收敛的,也即是不稳定的。 G(S)*H(S)是系统的开环传递函数,当G(S)*H(S)=-1时,以S=j ω带入,即获得开环系统的频域响应为G(j ω)*H(j ω)=-1,此时频率响应的增益和相角分别为: gain =‖-1‖=1 angle=tan -1(0/-1)=180° 从上面的分析可以看出,如果扰动信号经过G(S)和H(S)后,模不变,相位改变180°,那么这个闭环系统就是不稳定的。 但是,别忘了,这是负反馈系统,信号经过H(S)之后,本身就有180°的相移,所以,针对负反馈的闭环系统而言,其描述为:如果扰动信号经过系统主电路和反馈系统之后,其模不变,相位也不变,那么这个系统是不稳定的。为什么相位也不变?因为G(S)*H(S)造成的180°相移和负反馈本身造成的180°相移,两者叠加之后是360°,所以等于相位不变。 什么是穿越频率? G(S)*H(S)对应的增益为1(即幅值不变)的频率即为穿越频率。换算为dB 单位:20log1=0dB 。
6.5 开关电源环路稳定的试验方法 前面频率特性分析方法是以元器件小信号参数为基础,同时在线性范围内,似乎很准确。但有时很难做到,例如电解电容ESR 不准确且随温度和频率变化;电感磁芯磁导率不是常数,还有由于分布参数或工艺限制,电路存在分布参数等等,使得分析结果不可能完全吻合,有时甚至相差甚远。分析方法只是作为实际调试的参考和指导。因此,在有条件的情况下,直接通过测量运算放大器以外的环路的频率响应,根据6.4节的理论分析,利用测得的频率特性选择Venable 误差放大器类型,对环路补偿,并通过试验检查补偿结果,应当说这是最直接和最可靠设计方法。采用这个方法,你可以在一个星期之内将你的电源闭环调好。前提条件是你应当有一台网络分析仪。 6.5.1 如何开环测试响应 桥式、半桥、推挽、正激以及Buck 变换器都有一个LC 滤波电路,输出功率电路对系统性能影响最大。为了讨论方便,以图6.31为例来说明测试方法,重画为图 6.48(a)。电路参数为:输入电压115V ,输出电压为5V ,如前所述,滤波电感和电容分别为L =15μH ,C =2600μF ,PWM 控制器采用UC1524,它的锯齿波幅值为3V ,只用两路脉冲中的一路,最大占空比为0.5。为了测量小信号频率特性,变换器必须工作在实际工作点:额定输出电压、占空比和给定的负载电流。 从前面分析知道,如果把开关电源看着放大器,放大器的输入就是参考电压。从反馈放大器电路拓扑来说,开关电源的闭环是一个以参考电压为输入的电压串联负反馈电路。输入电源的变化和/或负载变化是外界对反馈控制环路的扰动信号。取样电路是一个电阻网络的分压器,分压比就是反馈系数,一般是固定的(R2/(R1+R2))。参考电压(相应于放大器的输入电压)稳定不变,即变化量为零,输出电压也不变(5V)。 如上所述,所有三种误差放大器都有一个原点极点。在低频闭环时,由于原点极点增益随频率减少而增高(即在反馈回路电容)在很低频率,有一个最大增益,由误差放大器开环 增益决定。直流增益很高,这意味着直流电压 仅有极小误差(相对于参考电压)。例如,误差放大器在很低频率增益可能达到80dB 或更高,因为80dB 即10000倍,迫使输出检测电压接近参考电压,误差仅万分之一,即0.01%。这当然远优于一般参考电压的精度,因而通常输出电压的误差由参考电压的误差决定。 为保证电源在任何干扰下输出稳定,我们将测试除误差放大器以外的开关电源的环路频率特性,来判断闭环穿越频率、放大器需要的增益以及需要补偿的相位,以此选择误差放大器类型。 为了开环测量误差放大器以外的环路增益,你可以利用控制芯片中的误差放大器。将误差放大器接成跟随器,利用跟随器输入阻抗高的特点,在输入端将测试的扫频信号和决定直流工作点的偏置电压求和Σ。直流工作点的偏置电压是一个可调直流电源(调节工作点)和一个交流扫频交流信号叠加一起送入跟随器。调节可调直流电压,输出电压随之变化。可调电压增大输出电压也增大。调节可调直流电压,使输出电压和负载达到规定的测试条件(输入电压最大和最小,负载满载和轻载),然后测试分压器输出AC out 和扫频信号输出AC in 的交流信号的幅值和相位,就得到相似于图6.36的除放大器以外的增益特性G t (AC out /AC in )。。应当注意,我们正在研究的是电源的小信号响应,是在一定工作点附近的线性特性,所以测试应当在实际工作点(在规定的输出电压和负载以及规定的输入电源电压)进行。即输出如果是5V ,就应当将输出精确调节到5V ,而不是3V 或10V 。一定要调节可调电源精密调整到额定输出相差mV 级以内,再进行开环测试。 (a ) 图 6.48 正激变换器环路增益测试
1. 绪论 在开关模式的功率转换器中,功率开关的导通时间是根据输入和输出电压来调节的。因而,功率转换器是一种反映输入与输出的变化而使其导通时间被调制的独立控制系统。由于理论近似,控制环的设计往往陷入复杂的方程式中,使开关电源的控制设计面临挑战并且常常走入误区。下面几页将展示控制环的简单化近似分析,首先大体了解开关电源系统中影响性能的各种参数。给出一个实际的开关电源作为演示以表明哪些器件与设计控制环的特性有关。测试结果和测量方法也包含在其中。 2. 基本控制环概念 2.1 传输函数和博得图 系统的传输函数定义为输出除以输入。它由增益和相位因素组成并可以在博得图上分别用图形表示。整个系统的闭环增益是环路里各个部分增益的乘积。在博得图中,增益用对数图表示。因为两个数的乘积的对数等于他们各自对数的和,他们的增益可以画成图相加。系统的相位是整个环路相移之和。 2.2 极点 数学上,在传输方程式中,当分母为零时会产生一个极点。在图形上,当增益以20dB每十倍频的斜率开始递减时,在博得图上会产生一个极点。图1举例说明一个低通滤波器通常在系统中产生一个极点。其传输函数和博得图也一并给出。 2.3 零点 零点是频域范围内的传输函数当分子等于零时产生的。在博得图中,零点发生在增益以20dB每十倍频的斜率开始递增的点,并伴随有90度的相位超前。图2 描述一个由高通滤波器电路引起的零点。 存在第二种零点,即右半平面零点,它引起相位滞后而非超前。伴随着增益递增,右半平面零点引起90度的相位滞后。右半平面零点经常出现于BOOST和
BUCK-BOOST转换器中,所以,在设计反馈补偿电路的时候要非常警惕,以使系统的穿越频率大大低于右半平面零点的频率。右半平面零点的博得图见图3。 3.0 开关电源的理想增益相位图 设计任何控制系统首先必须清楚地定义出目标。通常,这个目标是建立一个简单的博得图以达到最好的系统动态响应,最紧密的线性和负载调节率和最好的稳定性。理想的闭环博得图应该包含三个特性:足够的相位裕量,宽的带宽,和高增益。高的相位裕量能阻尼振荡并缩短瞬态调节时间。宽的带宽允许电源系统快速响应线性和负载的突变。高的增益保证良好的线性和负载调节率。 3.1 相位裕量 参看图4,相位裕量是在穿越频率处相位高于0度的数量。这不同于大多数控制系统教科书里提出的从-180度开始测量相位裕量。其中包括DC负反馈所提供的180度初始相移。在实际测量中,这180度相移在DC处被补偿并允许相位裕量从0度开始测量。 根据奈奎斯特稳定性判据,当系统的相位裕量大于0度时,此系统是稳定的。然而,有一个边界稳定区域存在,此处(指边界稳定区,译注),系统由于瞬态响应引起振荡到经过一个长的调节时间最终稳定下来。如果相位裕量小于45度,
6.4 开关电源闭环设计 从反馈基本概念知道:放大器在深度负反馈时,如输入不变,电路参数变化、负载变化或干扰对输出影响减小。反馈越深,干扰引起的输出误差越小。但是,深反馈时,反馈环路在某一频率附加相位移如达到180°,同时输出信号等于输入信号,就会产生自激振荡。 开关电源不同于一般放大器,放大器加负反馈是为了有足够的通频带,足够的稳定增益,减少干扰和减少线性和非线性失真。而开关电源,如果要等效为放大器的话,输入信号是基准(参考)电压U ref ,一般说来,基准电压是不变的;反馈网络就是取样电路,一般是一个分压器,当输出电压和基准 一定时,取样电路分压比(k v )也是固定的(U o =k v U ref ) 。开关电源不同于放大器,内部(开关频率)和外部干扰(输入电源和负载变化)非常严重,闭环设计目的不仅要求对以上的内部和外部干扰有很强抑制能力,保证静态精度,而且要有良好的动态响应。 对于恒压输出开关电源,就其反馈拓扑而言,输入信号(基准)相当于放大器的输入电压,分压器是反馈网络,这就是一个电压串联负反馈。如果恒流输出,就是电流串联负反馈。 如果是恒压输出,对电压取样,闭环稳定输出电压。因此,首先选择稳定的参考电压,通常为5~6V 或2.5V ,要求极小的动态电阻和温度漂移。其次要求开环增益高,使得反馈为深度反馈,输出电压才不受电源电压和负载(干扰)影响和对开关频率纹波抑制。一般功率电路、滤波和PWM 发生电路增益低,只有采用运放(误差放大器)来获得高增益。再有,由于输出滤波器有两个极点,最大相移180°,如果直接加入运放组成反馈,很容易自激振荡,因此需要相位补偿。根据不同的电路条件,可以采用Venable 三种补偿放大器。补偿结果既满足稳态要求,又要获得良好的瞬态响应,同时能够抑制低频纹波和对高频分量衰减。 6.4.1 概述 图6.31为一个典型的正激变换器闭环调节的例子。可以看出是一个负反馈系统。PWM 控制芯片中包含了误差放大器和PWM 形成电路。控制芯片也提供许多其他的功能,但了解闭环稳定性问题,仅需 考虑误差放大器和PWM 。 对于输出电压U o 缓慢或直流变化,闭环当然是稳定的。例如输入电网或负载变化(干扰),引起U o 的变化,经R 1和R 2取样(反馈网络),送到误差放大器EA 的反相输入端,再与加在EA 同相输入端的参考电压(输入电压)U ref 比较。将引起EA 的输出直流电平U ea 变化,再送入到脉冲宽度调制器PWM 的输入端A 。在PWM 中,直流电平U ea 与输入B 端0~3V 三角波U t 比较,产生一个矩形脉冲输出,其宽度t on 等于三角波开始时间t0到PWM 输入B 三角波与直流电平相交时间t1。此脉冲宽度决定了芯片中输出晶体管导通时间,同时也决定了控制晶体管Q1的导通时间。U dc 的增加引起U y 的增加,因U o =U y t o n /T ,U o 也随之增加。U o 增加引起Us 增加,并因此U ea 的减少。从三角波开始到t1的t on 相应减少, U o 恢复到它的初始值。当然,反之亦然。 PWM 产生的信号可以从芯片的输出晶体管发射极或集电极输出,经电流放大提供Q1基极驱动。但不管从那一点-发射极还是集电极-输出,必须保证当U o 增加,要引起t on 减少,即负反馈。 应当注意,大多数PWM 芯片的输出晶 体管导通时间是t0到t1。对于这样的芯片,U s 送到EA 的反相输入端,PWM 信号如果驱动功率NPN 晶体管基极(N 沟道MOSFET 的栅极),则芯片输出晶体管应由发射极输出。 然而,在某些PWM 芯片(TL494)中,它们的导通时间是三角波U t 与直流电平(U ea )相交时间 图6.31 典型的正激变换器闭环控制
反激型电源中的控制环路的设计 经常主电路是根据应用要求设计的,设计时一般不会提前考虑控制环路的设计。假设主功率部分已经全部设计完成,然后来探讨环路设计。环路设计一般由下面几过程组成: 1)根据实际要求和各限制条件确定带宽频率,既增益曲线的0dB 频率。 2)画出已知部分的频响曲线。 3) 根据步骤1)确定的带宽频率决定补偿放大器的类型和各频率点。使带宽处的曲线斜率为-1,画出整个电路的频响曲线。 首先我们应该明白系统稳定的要求: 1.在截止频率Fco(开环增益为1)处,总开环相位延迟必须小于180度,一般留 有45度裕量。 2.为防止-2的增益斜率的电路相位快速变化,系统的开环增益曲线在Fco 附近 的斜率应为-1。 系统的各部分框图如下: 图1 上图包括了一下几个模块,其中: ??V V G K EA =,为误差放大器传递函数; R E OC V V A ??'=,光耦电路的增益; C VC V V G ??0=,控制电压到输出电压的传递函数
已知部分的频响曲线是指除G EA(补偿放大器)外的所有部分的乘积,在BODE图上是相加。 首先确定剪切频率F CO。环路带宽当然希望越高越好,但受到几方面的限制:a)为了保证系统稳定,根据采样定理,剪切频率F CO必须小于开关频率的1/2,但实际上,F CO必须远远小于开关频率的1/2,否则在输出中将会有很大的纹波。 b)如果电路工作在CCM模式下,则存在着右半平面零点(RHZ)。这个零点的影响,RHZ随输入电压,负载,电感量大小而变化,几乎无法补偿,我们只有把带宽设计的远离它,一般取其1/4-1/5;c)补偿放大器的带宽不是无穷大,当把环路带宽设的很高时会受到补偿放大器无法提供增益的限制,及电容零点受温度影响等。所以一般实际带宽取开关频率的1/6-1/10。 选定F CO后,在F CO处的T(总体传函)的增益为0,则G EA在F CO处的增益必须为G VC A OC在此处增益的倒数。 然后确定除G EA(补偿放大器)外的所有部分,即系统的除G EA的传递函数。如果我们采用的3845的电流型控制模式,部分电路图如下: 图2则在CCM下,系统的传函如下:
今天 作为工程师,每天接触的是电源的设计工程师,发现不管是电源的老手,高手,新手,几乎对控制环路的设计一筹莫展,基本上靠实验.靠实验当然是可以的,但出问题时往往无从下手,在这里我想以反激电源为例子(在所有拓扑中环路是最难的,由于RHZ 的存在),大概说一下怎么计算,至少使大家在有问题时能从理论上分析出解决问题的思路. 示意图:
这里给出了右半平面零点的原理表示,这对用PSPICE 做仿真很有用,可以直接套用此图. 递函数自己写吧,正好锻炼一下,把输出电压除以输入电压就是传递函数. bode 图可以简单的判定电路的稳定性,甚至可以确定电路的闭环响应,就向我下面的图中表示的.零,极点说明了增益和相位的变化 二: 单极点补偿,适用于电流型控制和工作在DCM 方式并且滤波电容的ESR 零点频率较低的
电源.其主要作用原理是把控制带宽拉低,在功率部分或加有其他补偿的部分的相位达到180 度以前使其增益降到0dB. 也叫主极点补偿. 双极点,单零点补偿,适用于功率部分只有一个极点的补偿.如:所有电流型控制和非连续方式电压型控制.
三极点,双零点补偿.适用于输出带LC谐振的拓扑,如所有没有用电流型控制的电感电流连续方式拓扑。 C1 的主要作用是和R2 提升相位的.当然提高了低频增益.在保证稳定的情况下是越小越好. C2 增加了一个高频极点,降低开关躁声干扰. 串聯C1 實質是增加一個零點,零點的作用是減小峰值時間,使系統響應加快,并且閉環越接近虛軸,這种效果越好.所以理論上講,C1 是越大越好.但要考慮,超調量和調節時間,因為零點越距离虛軸越近,閉環零點修正系數Q 越大,而Q 與超調量和調節時間成正比,所以又不能大.總之,考慮閉環零點要折衷考慮. 并聯C2 實質是增加一個及點,級點的作用是增大峰值時間,使系統響應變慢.所以理論上講,C2也是越大越好.但要考慮到,當零級點彼此接近時,系統響應速度相互抵消.從這一點就可以說明,我們要及時響應的系統C1 大,至少比C2 大
Boost 电流控制型环路分析 抱歉没图,图就是一般的电流控制性的环路。我尽量叙述详细。 参考《精通开关电源设计》,p196,从控制到输出(Vcont 到Vout )的传递函数: 1)() 1()1(1 22+*+-*-*Q W S W S W s D VIN V O O RHP RAMP 其中,1 211)1(1 L R Q W D L L C L W O O =*-==,,, 带入设计数据,Vin=15V ,Iout=0.5A,V out=30V , D=0.5, L=35uH 。 计算得到Wo=34K rad/s=5.4KHz , Q=12.6, 这儿出现共轭极点,在波特图上怎么处理这对共轭极点? 难道还是可以处理成一个极点在Wo/Q,一个极点在Wo*Q ? 这儿电流控制型,采样Rcs*IL ,故RAMP V =Rcs*IL 。(这个有问题没) P199,Vout 到Vcont 的传递函数: )(Z gm 2 11 S R R R H O f f f **+= 其中,OUT 211V 1= +f f f R R R ,4104gm -*=,)1(121111+*+=S C R SC S C R Z O (p213) 其中,在跨导比较器(误差放大器)输出做的环路补偿,补偿电路是一个R1串联C1接地,再并联一个C2,。Zo 就是R1,C1,C2的阻抗。 然后给出datasheet 上做的补偿:先计算出下面 主极点OUT OUT OUT OUT OUT V C V I L 2D -1f ,2I f 2RHP p ***=**=ππ)(,和右半平面零点 然后计算补偿部分R1,C1,C2. 去穿越极点在0.2RHP f 处,然后直接给出了R1的值等于 1 2p 11p RHP 1C f 21,)1(V gm f 5I Rcs f R R C R R C D OUT ESR OUT OUT *=**=-******=,π 关键是R1怎么得来的分析不出来,因为传递函数里C1是和开环增益相关的,所以书上都是先得到C1,由C1求R1.从它补偿思路看,补偿长生了一个零极点,产生一个零点1/R1*C1来抵消fp ,产生一个极点来抵消ESR 零点。产生的零极点来控制穿越频率的位置?
针对固定频率峰值电流模式PWM升压型DC-DC变换器。给出了一种结构简单、易于集成的电流环路补偿电路的设计方法。该电路的斜坡产生电路可对片内振荡器充放电电容上的电压作V/I转换,其所得到的斜坡电流具有稳定、斜率易于调节等特点;而电流采样电路主体采用SENSEFET结合优化的缓冲级和V/I转换电路,从而在提高采样精度的同时,还减小了损耗。整个电路可采用0.6μm15V BCD工艺实现。通过Cadence Spectre进行的仿真结果表明,该电路可有效地抑制亚谐波振荡,采样精度达到77.9%,补偿斜率精度达到81.5%。关键词:斜坡补偿;电流采样;电流模式;V/I转换 O引言 固定频率峰值电流模式PWM(Pulse WidthModulation)DC-DC变换器同传统的电压模式控制相比,具有瞬态响应好,输出精度高,带载能力强等优点,因而被广泛应用。作为重要的模拟单元,斜坡补偿电路和电流采样电路是电流模式PWM控制的根基,对电流模式控制中电流环路的稳定性起着重要作用。 1电路结构 图1所示是典型峰值电流模式PWM Boost DC-DC控制系统的结构框图。当电压外环的电压反馈信号经过误差放大器放大得到的误差信号VE送至PWM比较器后,将与电流内环的一个变化的、其峰值代表输出电感电流峰值的三角波或梯形尖角状合成波信号VE比较,从而得到PWM脉冲关断阈值。即:
在(1)式中:第一项为斜坡补偿部分,用于保证电流环路的稳定;第二项反映了电感电流的大小,通常由电流采样电路产生;第三项用于产生一个固定的基础电平,以为PWM比较器输入端图1典型峰值电流模式PWMBoostDC—DC控制系统框图提供一个合适的直流工作点。 因此,峰值电流模式控制不是用电压误差信号直接控制PWM脉冲宽度,而是通过控制峰值输出端的电感电流大小,然后来间接地控制PWM脉冲宽度。 但是,电流模式的结构决定了其应用时存在电流内环在占空比大于50%时的开环不稳定现象、亚谐波振荡、非理想的环路响应,以及容易受噪声影响等几个固有缺点。针对上述问题,在环路的补偿方式上,除
开关电源控制环路分析 摘 要开关电源被誉为高效节能型电源,它代表着稳压电源的发展方向,现已成为稳压电源的主流产品。同时,开关电源也是反馈回路控制系统,所谓电路反馈,就是指将放大电路的输出量(电压或电流信号)的部分或全部,通过一定方式(元件或网络)返送到输入回路的过程,完成输出量向输入端回送的电路称为反馈元件或反馈网络。 关键词 零极点 幅值裕度 相位裕度 1 引言 稳定的反馈环路对开关电源来说是非常重要的,如果没有足够的相位裕度和幅值裕度,电源的动态性能就会很差或者出现输出振荡。下面先介绍三种控制方式的各种零,极点的幅频和相频特性,再对最常用的反馈调整器TL431的零、极点及特性进行分析。Topswitch是市场上广泛应用的反激式电源的智能芯片,它的控制方式是比较复杂的电压型控制,内部集成了一部分补偿功能,最后分析一个Topswitch设计的电源,对它的环路进行解剖。 2 环路补偿方式及TL431特性 2.1 单极点补偿 适用于电流型控制和工作在DCM方式并且滤波电容的ESR零点频率较低的电源。其主要作用原理是把控制带宽拉低,在功率部分或加有其他补偿的部分的相位达到180度以前使其增益降到0dB。 图1 2.2 双极点,单零点补偿 适用于功率部分只有一个极点的补偿,例如所有电流型控制和非连续方式电压型控制。
图2 2.3 三极点、双零点补偿 适用于输出带LC谐振的拓扑,例如所有没有用电流型控制的电感电流连续方式拓扑。 图3 2.4 TL431输出供电时的零极点特性 TL431是开关电源次级反馈最常用的基准和误差放大器件,其供电方式不同对它的传递函数有很大的影响。 图4 其中:
(一) 补偿完结分析 来自自控原理书 1. D “需要指出,因为微分控制作用只对动态过程其作用,而对稳态过程没有影响,且对系统噪声非常敏感,所以单一的D控制器在任何情况下都不适宜与被控对象串连起来单独使用。” 2. I “积分控制器I,可以提高系统的稳态性能,但是积分控制使系统增加一个位于原点的开环极点,是信号滞后90度,对稳定性不利。” 3. P “比例控制,具有比例控制规律的控制器,称为P控制器,加大控制器增益Kp,可以提高系统的开环增益,减小系统的稳态误差,从而提高系统的控制精度,但是会降低系统的相对稳定性,甚至可能造成系统的不稳定。” 1)这个传递函数中最直观的的反映只有零极点,是针对频域讨论 2)PID控制是时域分析手法,所以你要得到PID的系数就需要分别了解构成P,I,D环节是由那几个的元件主导的,时域的分析方法是困难的,所以一般只作为理论依据,分析还是根据频域的零极点模型。 3)如果你能把传递函数转变成下来第二式的形式便能得到P,I,D的系数,但是显然有些困难。
我对诗句的解读 Ⅰ.“曲线震荡很频繁,比例度盘要放大”
可以看出两点:1.比例取大了,振荡频繁。2.比例改变,对稳态误差有影响。Ⅱ.“曲线漂浮绕大湾,比例度盘往小扳” Ⅲ.曲线偏离回复慢,积分时间往下降 Ⅳ.曲线波动周期长,积分时间再加长
Ⅴ.曲线振荡频率快,先把微分降下来 Ⅵ.动差大来波动忙,微分时间应加长 下面是数字PID调节
这个和模拟PID有区别吗?开关电源是病态的开关系统,能用吗?且如何看??? 频域的零极点分析来进行调整是间接的改变了时域的曲线,而时域在工程中是相对而言比较直观的,是大家比较喜欢的,可是这个间接如何体现呢????? 采用saber对一个buck电路进行仿真验证,看这个PID能否用到这里面来?
开关电源的建模和环路补偿设计上 如今的电子系统变得越来越复杂,电源轨和电源数量都在不断增加。为了实现最佳电源解决方案密度、可靠性和成本,系统设计师常常需要自己设计电源解决方案,而不是仅仅使用商用砖式电源。设计和优化高性能开关模式电源正在成为越来越频繁、越来越具挑战性的任务。 电源环路补偿设计常常被看作是一项艰难的任务,对经验不足的电源设计师尤其如此。在实际补偿设计中,为了调整补偿组件的值,常常需要进行无数次迭代。对于一个复杂系统而言,这不仅耗费大量时间,而且也不够准确,因为这类系统的电源带宽和稳定性裕度可能受到几种因素的影响。本应用指南针对开关模式电源及其环路补偿设计,说明了小信号建模的基本概念和方法。本文以降压型转换器作为典型例子,但是这些概念也能适用于其他拓扑。本文还介绍了用户易用的LTpowerCAD设计工具,以减轻设计及优化负担。 确定问题 一个良好设计的开关模式电源(SMPS) 必须是没有噪声的,无论从电气还是声学角度来看。欠补偿系统可能导致运行不稳定。不稳定电源的典型症状包括:磁性组件或
陶瓷电容器产生可听噪声、开关波形中有抖动、输出电压震荡、功率FET 过热等等。 不过,除了环路稳定性,还有很多原因可能导致产生不想要的震荡。不幸的是,对于经验不足的电源设计师而言,这些震荡在示波器上看起来完全相同。即使对于经验丰富的工程师,有时确定引起不稳定性的原因也是很困难。图 1 显示了一个不稳定降压型电源的典型输出和开关节点波形。调节环路补偿可能或不可能解决电源不稳定问题,因为有时震荡是由其他因素引起的,例如PCB 噪声。如果设计师对各种可能性没有了然于胸,那么确定引起运行噪声的潜藏原因可能耗费大量时间,令人非常沮丧。 图1:一个“不稳定” 降压型转换器的典型输出电压和 开关节点波形 对于开关模式电源转换器而言,例如图 2 所示的 LTC3851 或LTC3833 电流模式降压型电源,一种快速确
引言 开关电源的输出是直流输入电压、占空比和负载的函数。在开关电源设计中,反馈系统的设计目标是无论输入电压、占空比和负载如何变化,输出电压总在特定的范围内,并具有良好的动态响应性能。 电流模式的开关电源有连续电流模式(CCM)和不连续电流模式(DCM)两种工作模式。连续电流模式由于有右半平面零点的作用,反馈环在负载电流增加时输出电压有下降趋势,经若干周期后最终校正输出电压,可能造成系统不稳定。因此在设计反馈环时要特别注意避开右半平面零点频率。 当反激式开关电源工作在连续电流模式时,在最低输入电压和最重负载的工况下右半平面零点的频率最低,并且当输入电压升高时,传递函数的增益变化不明显。当由于输入电压增加或负载减小,开关电源从连续模式进入到不连续模式时,右半平面零点消失从而使得系统稳定。因此,在低输入电压和重输出负载的情况下,设计反馈环路补偿使得整个系统的传递函数留有足够的相位裕量和增益裕量,则开关电源无论在何种模式下都能稳定工作。 1 反激式开关电源典型设计 图l是为变频器设计的反激式开关电源的典型电路,主要包括交流输入整流电路,反激式开关电源功率级电路(有PWM控制器、MOS管、变压器及整流二极管组成),RCD缓冲电路和反馈网络。其中PWM控制芯片采用UC2844。UC2844是电流模式控制器,芯片内部具有可微调的振荡器(能进行精确的占空比控制)、温度补偿的参考基准、高增益误差放大器、电流取样比较器。
开关电源设计输入参数如下:三相380V工业交流电经过整流作为开关电源的输入电压Udc,按最低直流输入电压Udcmin为250V进行设计;开关电源工作频率f为60kHz,输出功率Po为60W。 当系统工作在最低输入电压、负载最重、最大占空比的工作情况下,设计开关电源工作在连续电流模式(CCM),纹波系数为0.4。设计的开关电源参数如下:变压器的原边电感Lp=4.2mH,原边匝数Np=138;5V为反馈输出端,U5V=5V,负载R5=5Ω,匝数N5V=4,滤波电容为2个2200μF/16V电容并联,电容的等效串联电阻Resr=34mΩ;24V输出的负载R24=24Ω,匝数N24V=17;15V输出的负载R1 5=15Ω,匝数N15V=1l;一1 5V输出的负载R-15V=15Ω,匝数N-15V=11。 2 功率级电路的传递函数 电流模式控制器控制框图包含两个反馈环,外部电压环反馈电压信息,内部电流环反馈电流信息(如图2所示)。电流环的输入是控制电压UC和电感电流采样值US的差值,电流环的输出是占空比D。当US小于UC时,PWM调制器(Fm)输出高电平,功率开关开通,当US大于UC,PWM调制器输出低电平,功率开关关断。通过具有固定频率时钟信号的 RS触发器,下一个周期自动置位。通过这种方式,电感峰值电流被控制电压精确控制。
反馈环路设计 稳定的反馈环路对开关电源来说是非常重要的,如果没有足够的相位裕度和幅值裕度,电源的动态性能就会很差或者出现输出振荡. 下面先介绍了控制环路分析里面必须用到的各种零,极点的幅频和相频特性;然后对最常用的反馈调整器TL431的零,极点特性进行分析;TOPSWITCH是市场上广泛应用的反激式电源的智能芯片,它的控制方式是比较复杂的电压型控制,为了方便一般使用者,部集成了一部分补偿功能,所以很多工程师不清晰它的整个环路,最后运用上面的理论分析一个TOPSWITCH设计的电源,对它的环路的每一个部分进行了解剖,可以使工程师更好地应用TOPSWITCH及解决设计中遇到的环路问题. 波特图是分析开关电源控制环路的一个有力工具,它可以使复杂的幅频和相频响应的计算变成简单的加减法,特别是使用渐近线近似以后,只需要计算渐近线改变方向点的值. 增益按-20dB/10倍频程下降, 相位近似按-45°/10倍频程下降.最大相移为-90° 增益按20dB/10倍频程上升,相位近似按45°/10倍频程上升,最大总相移为90°
右半平面零点是反激和BOOST电路里面特有的现象.增益按20dB/10倍频程上升,相位近似按-45°/10倍频程下降,总相移为-90°,右半平面零点是几乎无法补偿的,做设计时尽量把其频率提升或降低带宽 Q值是电路的品质因数,过了谐振点后,增益按-40dB/10倍频程下降, 相位依Q值的不同有不同的变化率,Q值越大,相位变化越剧烈,在谐振点相位是-90°, 最大总相移为-180°
Q值是电路的品质因数,R2是负载电阻,R1是电感的电阻,电容的ESR, 整流管阻,和代表磁心损耗和漏感损耗的合成电阻.大部分的AC/DC电源,由于损耗较高,一般Q值很难大于3. 当Q值较低时(Q<<0.5),双极点响应会退化为两个单极点响应,如上图所示. TL431用输出供电时的零,极点特性 TL431是开关电源次级反馈最常用的基准和误差放大器件,其供电方式不同对它的传递函数有很大的影响,而以前的分析资料常常忽略这一点.下面分析常见的供电和输出反馈接在一起时的传递函数.
【干货分享】开关电源环路补偿设计步骤讲解 1.对于硬件工程师来说,开关电源和运放的信号处理电路是最常遇到的,都是典型的带负反馈的闭环控制系统。因此,这两类电路设计的稳定性和控制理论密切相关。简化的闭环控制系统框图如图1所示,被控对象的传递函数为H,反馈部分的传递函数为G。 图1
以上各式中的GH一般称为系统的环路增益或者开环增益。根据式(2)可知,当1+GH=0,即GH=-1时,意味着环路增益为1,相位滞后180°,系统不稳定发生自激振荡。当然也可以从另一个角度进行理解,系统发生自激振荡时,不需要输入量Xi,即净输入量,可得GH=-1,即反馈量Xf和输出量Xo形成彼此互相维持的关系。从稳定性条件出发,我们可以知道环路增益小于1时系统可以稳定,相位滞后不到180°时系统可以稳定。这表明左半平面的极点和零点都在某一方面提升稳定性,另一方面降低稳定性。比如左半平面极点可以使增益降低,这能提升稳定性;但是极点增加了相位滞后,这降低了稳定性。比如左半平面零点使相位超前,这能提升稳定性;但是零点使增益增加,这降低了稳定性。只有右半平面零点是最特殊的,增加增益的同时相位滞后,这会加剧系统不稳定。根据控制理论的稳定性条件可知,
相位裕量至少为45°,转化为伯德图的话,就是要求在增益为0dB 时的穿越频率处,斜率应该为-20dB/decade,即负20dB每十倍频,或斜率为,两者等价。根据式(3)可知,当GH>>1时,即引入深度负反馈后,Xf=Xi。这就是为什么运放的虚短需要在引入深度负反馈时才成立的原因。由于运放本身的开环放大倍数H已经非常大,引入负反馈后一般都能满足深度负反馈的要求。 根据式(4)可知,如果想要直流稳态误差为0,则应满足。这就是为什么控制系统的低频环路增益(开环增益)要尽量大的原因,这点在开关电源环路设计中很重要。 对于一般的运放电路而言,图1即是其控制系统框图。而开关电源的系统框图则较为复杂,如图2所示,可以将PWM调制器,开关管和LC滤波器合并统称为功率级,用H表示,误差补偿器用G表示,反馈分压系数用k表示,实际设计中我们经常将k和G合并在一起称为G,则简化后的框图和图1类似,环路增益为GH。另外,实际系统中还经常存在输入扰动和负载扰动,通过线性叠加定理,总输出则可表示为下式: 通过式(5)可以比较清楚地看到输入扰动和负载扰动对输出的影响,输入扰动对应线性调整率指标,负载扰动则对应负载调整率指标。另外通过前述结论我们知道,要想稳态误差越接近于0,则GH直流环路增益应该越大越好。
开关电源环路补偿
今天 作为工程师,每天接触的是电源的设计工程师,发现不管是电源的老手,高手,新手,几乎对控制环路的设计一筹莫展,基本上靠实验.靠实验当然是可以的,但出问题时往往无从下手,在这里我想以反激电源为例子(在所有拓扑中环路是最难的,由于RHZ 的存在),大概说一下怎么计算,至少使大家在有问题时能从理论上分析出解决问题的思路. 示意图:
这里给出了右半平面零点的原理表示,这对用PSPICE 做仿真很有用,可以直接套用此图. 递函数自己写吧,正好锻炼一下,把输出电压除以输入电压就是传递函数. bode 图可以简单的判定电路的稳定性,甚至可以确定电路的闭环响应,就向我下面的图中表示的.零,极点说明了增益和相位的变化 二: 单极点补偿,适用于电流型控制和工作在DCM 方式并且滤波电容的ESR 零点频率较低的电源.其主要作用原理是把控制带宽拉低,在功率部分或加有其他补偿的部分的相位达到180 度以前使其增益降到0dB. 也叫主极点补偿.
双极点,单零点补偿,适用于功率部分只有一个极点的补偿.如:所有电流型控制和非连续方式电压型控制. 三极点,双零点补偿.适用于输出带LC谐振的拓扑,如所有没有用电流型控制的电感电流连续方式拓扑。
C1 的主要作用是和R2 提升相位的.当然提高了低频增益.在保证稳定的情况下是越小越好. C2 增加了一个高频极点,降低开关躁声干扰. 串聯C1 實質是增加一個零點,零點的作用是減小峰值時間,使系統響應加快,并且閉環越接近虛軸,這种效果越好.所以理論上講,C1 是越大越好.但要考慮,超調量和調節時間,因為零點越距离虛軸越近,閉環零點修正系數Q 越大,而Q 與超調量和調節時間成正比,所以又不能大.總之,考慮閉環零點要折衷考慮. 并聯C2 實質是增加一個及點,級點的作用是增大峰值時間,使系統響應變慢.所以理論上講,C2也是越大越好.但要考慮到,當零級點彼此接近時,系統響應速度相互抵消.從這一點就可以說明,我們要及時響應的系統C1 大,至少比C2 大 三:环路稳定的标准. 只要在增益为1 时(0dB)整个环路的相移小于360 度,环路就是稳定的.