《模糊控制》实验指导书李士勇沈毅周荻邱华洲袁丽英 实验名称: 实验地点: 指导教师: 联系电话: Harbin Institute of Technology 2005.3
模糊控制实验指导书 一、 实验目的 利用Matlab 软件实现模糊控制系统仿真实验,了解模糊控制的查询表方法和在线推理方法的基本原理及实现过程,并比较模糊控制和传统PID 控制的性能的差异。 二、 实验要求 设计一个二维模糊控制器分别控制一个一阶被控对象1 1 )(11+=s T s G 和二阶被控对象) 1)(1(1 )(212++= s T s T s G 。先用模糊控制器进行控制,然后改变控制对 象参数的大小,观察模糊控制的鲁棒性。为了进行对比,再设计PID 控制器,同样改变控制对象参数的大小,观察PID 控制的鲁棒性。也可以用其他语言编制模糊控制仿真程序。 三、 实验内容 (一)查询表式模糊控制器实验设计 查询表法是模糊控制中的最基本的方法,用这种方法实现模糊控制决策过程最终转化为一个根据模糊控制系统的误差和误差变化(模糊量)来查询控制量(模糊量)的方法。本实验利用了Matlab 仿真模块——直接查询表(Direct look-up table )模块(在Simulink 下的Functions and Tables 模块下去查找),将模糊控制表中的数据输入给 Direct look-up table ,如图1所示。设定采样时间(例如选用0.01s ),在仿真中,通过逐步调整误差量化因子Ke ,误差变化的量化因子Kec 以及控制量比例因子Ku 的大小,来提高和改善模糊控制器的性能。
北京科技大学 智能控制理论基础实验报告 学院 专业班级 姓名 学号 指导教师 成绩 2014 年4月17日
实验一采用SIMULINK的系统仿真 一、实验目的及要求: 1.熟悉SIMULINK 工作环境及特点 2.掌握线性系统仿真常用基本模块的用法 3.掌握SIMULINK 的建模与仿真方法 二、实验内容: 1.了解SIMULINK模块库中各子模块基本功能 微分 积分 积分步长延时 状态空间模型 传递函数模型 传输延迟 可变传输延迟 零极点模型
直接查询表 函数功能块MATLAB函数 S函数(系统函数) 绝对值 点乘 增益 逻辑运算 符号函数 相加点 死区特性 手动开关 继电器特性 饱和特性 开关模块 信号分离模块 信号复合模块 输出端口 示波器模块 输出仿真数据到文件
通过实验熟悉以上模块的使用。 2. SIMULINK 的建模与仿真方法 (1)打开模块库,找出相应的模块。鼠标左键点击相应模块,拖拽到模型窗口中即可。 (2)创建子系统:当模型大而复杂时,可创建子系统。 (3)模块的封装: (4)设置仿真控制参数。 3.SIMULINK仿真实际应用 PID控制器的仿真实现。 控制对象的开环传递函数如下图: 加入PID控制器,求系统单位负反馈闭环单位阶跃响应,要求通过调节器的作用使系统满足超调量20%,上升时间3s,调节时间10s的要求。使输出曲线如下图。要求加入的PID控制器封装成一个模块使用。 三、实验报告要求: 1.针对具体实例写出上机的结果,体会其使用方法,并作出总结。
控制对象的开环传递函数如下图: 加入PID控制器,求系统单位负反馈闭环单位阶跃响应,要求通过调节器的作用使系统满足超调量20%,上升时间3s,调节时间10s的要求。使输出曲线如下图。要求加入的PID控制器封装成一个模块使用。PID如下: 图1-PID控制器仿真 设计的PID控制器参数为,P-0.3,I-0.5,D-0.4,尽可能的达到超调量20%,上升时间3s,调节时间10s的要求,仿真曲线图如下: 图2-PID控制器仿真曲线图 才实验开始的初期,我觉得这个实验过于简单,但是上手之后,我发现它是
实验二 SolidWorks 草绘特征和放置特征操作(一) 一、 实验目的 1. 掌握基本零件建模的一般步骤和方法 2. 掌握SolidWorks 草绘特征:拉伸凸台、拉伸切除、旋转凸台、旋转切除、扫描、 放样的操作方法。 3. 掌握放置(应用)特征:钻孔特征、倒角特征、圆角特征、抽壳特征、拔模斜度特 征、筋的操作方法 二、 实验内容 完成下列下列零件造型 三、 实验步骤 1. 连接件设计 完成如图 1 (1) (2) 2 所示。 图 1连接件 图 2草图 (3) 单击【拉伸凸台/ 框内选择【两侧对称】选项,在【深度】文本框内输入“54mm ”,单击【确定】按钮,如图 3所示。 图 3 “拉伸”特征 (4) 120°”,然后 在第二参考中选择图形的一条下边线。单击【确定】按钮,建立新基准面,如
错误!未找到引用源。所示。 (5) 1,选择“反转法线” 1,单选择 4所示。 图4草图 图4建立基准面 底面边线
(6) 单击【拉伸凸台/ 列表框内选择【给定深度】选项,在【深度】文本框内输入“12mm”,单击【确定】按钮,如图5所示。 图5“拉伸”特征 (7)选取基体上表面,单击【草图绘制】进入草图绘制,使用中心线工具在 上表面的中心位置绘制直线,注意不要捕捉到表面边线,如图6所示。 图 6 中心线 (8) 内输入“8mm”,在图形区域选择中心线,在属性管理器中选中【添加尺寸】、【选择链】、【双向】和【顶端加盖】复选框,选中【圆弧】单选按钮,单击【确定】按钮,标注尺寸,完成草图,如图7所示。 运用“等距实体”绘制草图 (8) -拉伸】属性管理器,在【终止条件】下拉 列表框内选择【完全贯穿】选项,单击【确定】按钮,如图8所示。
实验二二阶系统的瞬态响应分析 一、实验目的 1、熟悉二阶模拟系统的组成。 2、研究二阶系统分别工作在ξ=1,0<ξ<1,和ξ> 1三种状态下的单 位阶跃响应。 3、分析增益K对二阶系统单位阶跃响应的超调量σP、峰值时间tp和调 整时间ts。 4、研究系统在不同K值时对斜坡输入的稳态跟踪误差。 5、学会使用Matlab软件来仿真二阶系统,并观察结果。 二、实验仪器 1、控制理论电子模拟实验箱一台; 2、超低频慢扫描数字存储示波器一台; 3、数字万用表一只; 4、各种长度联接导线。 三、实验原理 图2-1为二阶系统的原理方框图,图2-2为其模拟电路图,它是由惯性环节、积分环节和反号器组成,图中K=R2/R1,T1=R2C1,T2=R3C2。 图2-1 二阶系统原理框图
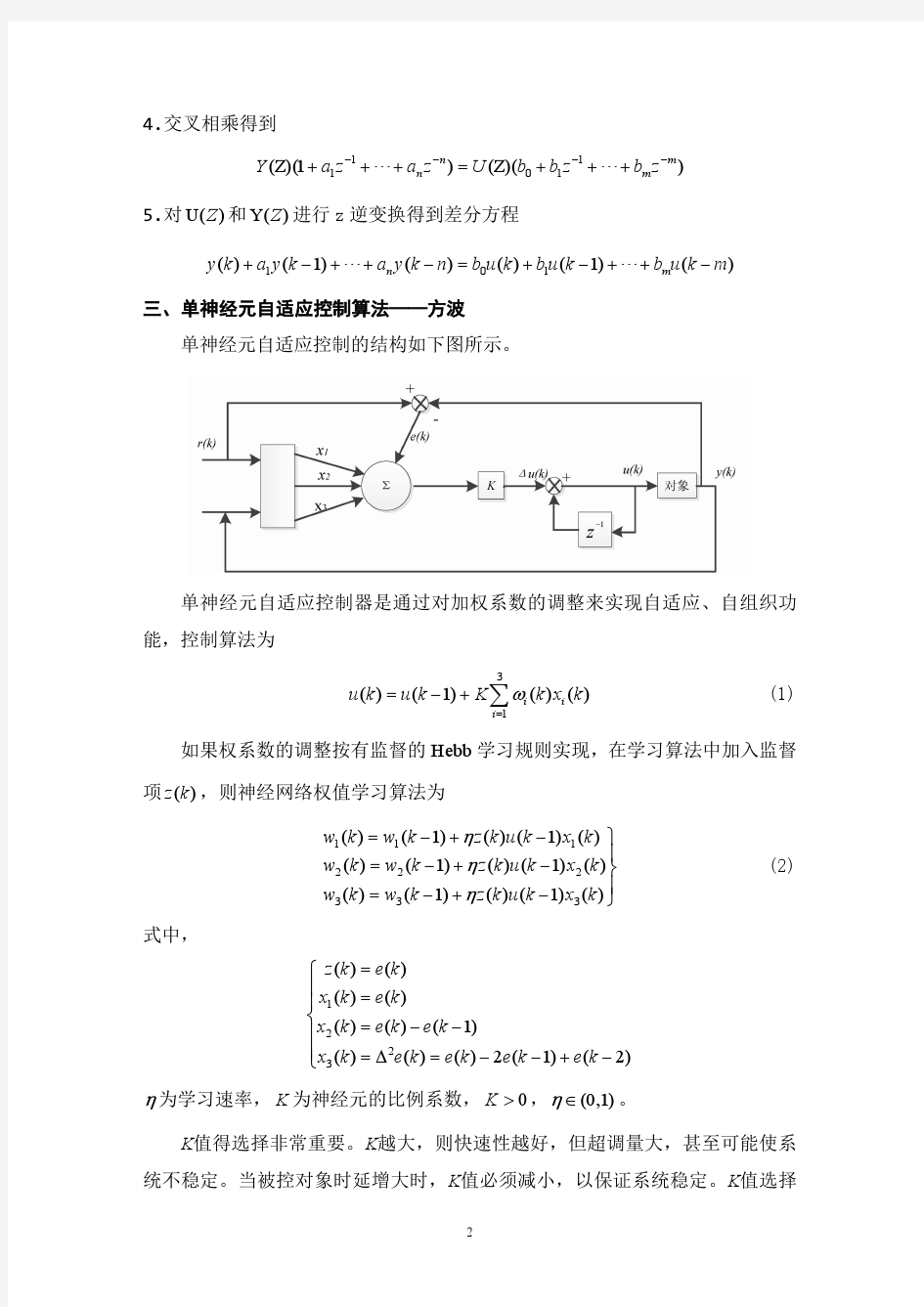
图2-1 二阶系统的模拟电路 由图2-2求得二阶系统的闭环传递函 12 22 122112 /() (1)()/O i K TT U S K U S TT S T S K S T S K TT ==++++ :而二阶系统标准传递函数为 (1)(2), 对比式和式得 n ωξ== 12 T 0.2 , T 0.5 , n S S ωξ====若令则。调节开环增益K 值,不仅能改变系统无阻尼自然振荡频率ωn 和ξ的值,可以得到过阻尼(ξ>1)、 临界阻尼(ξ=1)和欠阻尼(ξ<1)三种情况下的阶跃响应曲线。 (1)当K >0.625, 0 < ξ < 1,系统处在欠阻尼状态,它的单位阶跃响应表达式为: 图2-3 0 < ξ < 1时的阶跃响应曲线 (2)当K =0.625时,ξ=1,系统处在临界阻尼状态,它的单位阶跃响应表达式为: 如图2-4为二阶系统工作临界阻尼时的单位响应曲线。 (2) +2+=222n n n S S )S (G ωξω ω1 ()1sin( ) (3) 2-3n t o d d u t t tg ξωωωω--=+=式中图为二阶系统在欠阻尼状态下的单位阶跃响应曲线 e t n o n t t u ωω-+-=)1(1)(
智能控制理论及应用 (实验指导书) 实验一模糊控制的理论基础实验 实验目的: 学习隶属函数编程;模糊矩阵合成运算编程;模糊推理运算编程。 1隶属函数编程 学习P39 例2-12 (以下为例程) 完成思考题P80 2-2 写出W及V两个模糊集的隶属函数,并绘出“非常老,很老,比较老,有点老”的四个隶属度函数仿真后的曲线。 %Membership function for old People clear all; close all; for k=1:1:1001 x(k)=(k-1)*0.10; if x(k)>=0&x(k)<50 y(k)=0; else y(k)=1/(1+(1/((x(k)-50)/5)^2)); end end plot(x,y,'k'); xlabel('X Years');ylabel('Degree of membership'); 2 模糊矩阵合成仿真程序 学习P31例2-10,仿真程序如下。 完成思考题P81 2-5,并对比手算结果。 clear all; close all; A=[0.2,0.8; 0.6,0.1]; B=[0.5,0.7; 0.1,0]; %Compound of A and B for i=1:2 for j=1:2 AB(i,j)=max(min(A(i,:),B(:,j)')) end end
3 模糊推理仿真程序 学习P47 例2-16,仿真程序如下。 完成思考题2-9,并对比手算结果。 clear all close all a=[1;0.5] b=[0.1;0.5;1] c=[0.2;1] for i=1:2 for j=1:3 ab(i,j)=min(a(i),b(j));%求出D end end t1=[]; for i=1:2 t1=[t1;ab(i,:)']; end %准备好DT; for i=1:6 for j=1:2 r(i,j)=min(t1(i),c(j)); end end %求出R a1=[0.8;0.1] b1=[0.5;0.2;0] for i=1:2 for j=1:3 ab1(i,j)=min(a1(i),b1(j)); %求出D1 end end t2=[]; for i=1:2 t2=[t2;ab1(i,:)']; end for i=1:6 for j=1:2 d(i,j)=min(t2(i),r(i,j)); c1(j)=max(d(:,j)); end end
《智能控制技术》实验报告书 学院: 专业: 学号: 姓名:
实验一:模糊控制与传统PID控制的性能比较 一、实验目的 通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。 二、实验内容 本实验主要是设计一个典型环节的传统PID控制器以及模糊控制器,并对他们的控制性能进行比较。主要涉及自控原理、计算机仿真、智能控制、模糊控制等知识。 通常的工业过程可以等效成二阶系统加上一些典型的非线性环节,如死区、饱和、纯延迟等。这里,我们假设系统为:H(s)=20e0.02s/(1.6s2+4.4s+1) 控制执行机构具有0.07的死区和0.7的饱和区,取样时间间隔T=0.01。 设计系统的模糊控制,并与传统的PID控制的性能进行比较。 三、实验原理、方法和手段 1.实验原理: 1)对典型二阶环节,根据传统PID控制,设计PID控制器,选择合适的PID 控制器参数k p、k i、k d; 2)根据模糊控制规则,编写模糊控制器。 2.实验方法和手段: 1)在PID控制仿真中,经过仔细选择,我们取k p=5,k i=0.1,k d=0.001; 2)在模糊控制仿真中,我们取k e=60,k i=0.01,k d=2.5,k u=0.8; 3)模糊控制器的输出为:u= k u×fuzzy(k e×e, k d×e’)-k i×∫edt 其中积分项用于消除控制系统的稳态误差。 4)模糊控制规则如表1-1所示: 在MATLAB程序中,Nd用于表示系统的纯延迟(Nd=t d/T),umin用于表示控制的死区电平,umax用于表示饱和电平。当Nd=0时,表示系统不存在纯延迟。 5)根据上述给定内容,编写PID控制器、模糊控制器的MATLAB仿真程序,
Matlab实验指导书 河北大学电子信息工程学院 2004年1月
目录 MATLAB实验教学计划 (2) 实验一MATLAB基本操作 (3) 实验二MATLAB图形系统......................................................... . (5) 实验三 MATLAB程序设计 (6) 实验四 MATLAB基本应用领域 (7) 实验五设计性综合实验1---数字信道编译码 (14) 实验六设计性综合实验2---fir滤波器设计................................. . (16) 2
MATLAB实验教学计划 指导教师:郑晓昆薛文玲王竹毅学时数:12学时周4学时2次实验,共3周6次实验,第7—9教学周,每次实验2学时 所用仪器设备:MATLAB7.0实验软件系统 实验指导书:Matlab实验指导书 自编 实验参考书:
R语言实验指导书(二) 2016年10月27日
实验三创建和使用R语言数据集 一、实验目的: 1.了解R语言中的数据结构。 2.熟练掌握他们的创建方法,和函数中一些参数的使用。 3.对创建的数据结构进行,排序、查找、删除等简单的操作。 二、实验内容: 1.向量的创建及因子的创建和查看 有一份来自澳大利亚所有州和行政区的20个税务会计师的信息样本 1 以及他们各自所在地的州名。州名为:tas, sa, qld, nsw, nsw, nt, wa, wa, qld, vic, nsw, vic, qld, qld, sa, tas, sa, nt, wa, vic。 1)将这些州名以字符串的形式保存在state当中。 2)创建一个为这个向量创建一个因子statef。 3)使用levels函数查看因子的水平。 2.矩阵与数组。
i.创建一个4*5的数组如图,创建一个索引矩阵如图,用这个索引矩 阵访问数组,观察结果。 3.将之前的state,数组,矩阵合在一起创建一个长度为3的列表。
4.创建一个数据框如图。 5.将这个数据框按照mpg列进行排序。 6.访问数据框中drat列值为3.90的数据。
三、实验要求 要求学生熟练掌握向量、矩阵、数据框、列表、因子的创建和使用。
实验四数据的导入导出 一、实验目的 1.熟练掌握从一些包中读取数据。 2.熟练掌握csv文件的导入。 3.创建一个数据框,并导出为csv格式。 二、实验内容 1.创建一个csv文件(内容自定),并用readtable函数导入该文件。 2.查看R语言自带的数据集airquality(纽约1973年5-9月每日空气质 量)。 3.列出airquality的前十列,并将这前十列保存到air中。 4.查看airquality中列的对象类型。 5.查看airquality数据集中各成分的名称 6.将air这个数据框导出为csv格式文件。(write.table (x, file ="", sep ="", https://www.doczj.com/doc/3b15424245.html,s =TRUE, https://www.doczj.com/doc/3b15424245.html,s =TRUE, quote =TRUE)) 三、实验要求 要求学生掌握从包中读取数据,导入csv文件的数据,并学会将文件导出。
混凝土基本理论及钢桁架静力测试试验指导书
试验一、钢筋混凝土受弯构件正截面破坏试验 一、试验目的 1.了解受弯构件正截面的承载力大小、挠度变化及裂缝出现和发展过程; 2.观察了解受弯构件受力和变形过程的三个工作阶段及适筋梁的破坏特征; 3.测定受弯构件正截面的开裂荷载和极限承载力,验证正截面承载力计算方法。 二、试件、试验仪器设备 1.试件特征 (1). 根据试验要求,试验梁的混凝土强度等级为C20,纵向受力钢筋强度等级I级。 (2). 试件尺寸及配筋如图1所示,纵向受力钢筋的混凝土净保护层厚度为15mm 。 (3). 梁的中间500mm 区段内无腹筋,其余区域配有 6@60的箍筋,以保证不发生斜 截面破坏。 (4). 梁的受压区配有两根架立筋,通过箍筋与受力筋绑扎在一起,形成骨架,保证受力钢筋处在正确的位置。 2.试验仪器设备 (1). 静力试验台座、反力架、支座及支墩 (2). 20T 手动式液压千斤顶 (3). 读数显微镜及放大镜 (4). 位移计(百分表)及磁性表座 三、试验装置及测点布置 1.试验装置见图2 (1). 在加荷架中,用千斤顶通过分配梁进行两点对称加载,使简支梁跨中形成长 500mm 的纯弯曲段(忽略梁的自重)。 (2). 构件两端支座构造应保证试件端部转动及其中一端水平位移不受约束,基本符 合铰支承的要求。 2.测点布置 梁的跨中及两个对称加载点各布置一位移计f 3~f 5,量测梁的整体变形,考虑在加载的过程中,两个支座受力下沉,支座上部分别布置位移测点f 1和f 2,以消除由于支座下沉对挠度测试结果的影响。 图1 试件尺寸及配筋图
过程控制系统实验指导书 王永昌 西安交通大学自动化系 2015.3
实验一先进智能仪表控制实验 一、实验目的 1.学习YS—170、YS—1700等仪表的使用; 2.掌握控制系统中PID参数的整定方法; 3.熟悉Smith补偿算法。 二、实验内容 1.熟悉YS-1700单回路调节器与编程器的操作方法与步骤,用图形编程器编写简单的PID仿真程序; 2.重点进行Smith补偿器法改善大滞后对象的控制仿真实验; 3.设置SV与仿真参数,对PID参数进行整定,观察仿真结果,记录数据。 4.了解单回路控制,串级控制及顺序控制的概念,组成方式。 三、实验原理 1、YS—1700介绍 YS1700 产于日本横河公司,是一款用于过程控制的指示调节器,除了具有YS170一样的功能外,还带有可编程运算功能和2回路控制模式,可用于构建小规模的控制系统。其外形图如下: YS1700 是一款带有模拟和顺序逻辑运算的智能调节器,可以使用简单的语言对过程控制进行编程(当然,也可不使用编程模式)。高清晰的LCD提供了4种模拟类型操作面板和方便的双回路显示,简单地按前面板键就可进行操作。能在一个屏幕上对串级或两个独立的回路进行操作。标准配置I/O状态显示、预置PID控制、趋势、MV后备手动输出等功能,并且可选择是否通信及直接接收热偶、热阻等现场信号。对YS1700编程可直接在PC机上完成。
SLPC内的控制模块有三种功能结构,可用来组成不同类型的控制回路:(1)基本控制模块BSC,内含1个调节单元CNT1,相当于模拟仪表中的l台PID调节器,可用来组成各种单回路调节系统。 (2)串级控制模块CSC,内含2个互相串联的调节单元CNTl、CNT2,可组成串级调节系统。 (3)选择控制模块SSC,内含2个并联的调节单元CNTl、CNT2和1个单刀三掷切换开关CNT3,可组成选择控制系统。 当YS1700处于不同类型的控制模式时,其内部模块连接关系可以表示如下:(1)、单回路控制模式
同济大学电子与信息工程学院实验报告 姓名:学号: 学院:专业: 实验课程名称: 任课教师: 实验项目名称:基于BP神经网络的自整定PID控制仿真实验日期:
一、实验内容: 1.熟悉神经网络的特征、结构及学习算法。 2.通过实验掌握神经网络自整定PID的工作原理。 3.了解神经网络的结构对控制结果的影响。 4.掌握用MATLAB实现实现神经网络控制系统仿真的方法。 二、实验步骤及结果演示 1.实验步骤: (1)被控对象为一时变非线性对象,数学模型可表示为 式中系数a(k)是慢时变的, (2)如图5所示确定BP网络的结构,选4-5-3型的BP网络,各层加权系数的初值取区间[-0.5,0.5]上的随机数,选定学习率η=0.25和惯性系数α=0.05. (3)在MATLAB下依据整定原理编写仿真程序并调试。 (4)给定输入为阶跃信号,运行程序,记录实验数据和控制曲线。 (5)修改神经网络参数,如学习速率、隐含层神经元个数等,重复步骤(4)。 (6)分析数据和控制曲线。 图5 BP神经网络结构
2.结果展示: (1)实验代码: xite=0.25; alfa=0.02; IN=4; H=10; Out=3; wi=[ 0.4634 -0.4173 0.3190 0.4563; 0.1839 0.3021 0.1112 0.3395; -0.3182 0.0470 0.0850 -0.0722; -0.6266 0.0846 0.3751 -0.6900; -0.3224 0.1440 -0.2873 -0.0193; -0.0232 -0.0992 0.2636 0.2011; -0.4502 -0.2928 0.0062 -0.5640; -0.1975 -0.1332 0.1981 0.0422; 0.0521 0.0673 -0.5546 -0.4830; -0.6016 -0.4097 0.0338 -0.1503]; wi_1=wi;wi_2=wi;wi_3=wi; wo=[ -0.1620 0.3674 0.1959; -0.0337 -0.1563 -0.1454; 0.0898 0.7239 0.7605; 0.3349 0.7683 0.4714; 0.0215 0.5896 0.7143; -0.0914 0.4666 0.0771; 0.4270 0.2436 0.7026; 0.0215 0.4400 0.1121; 0.2566 0.2486 0.4857; 0.0198 0.4970 0.6450 ]'; wo_1=wo;wo_2=wo;wo_3=wo; x=[0,0,0]; u_1=0;u_2=0;u_3=0;u_4=0;u_5=0; y_1=0;y_2=0;y_3=0; oh=zeros(H,1); I=oh; error_2=0; error_1=0; ts=0.001; for k=1:1:6000 time(k)=k*ts; rin(k)=1; a(k)=1.2*(1-0.8*exp(-0.1*k));
实验二SolidWorks草绘特征和放置特征操作(一) 一、实验目的 1.掌握基本零件建模的一般步骤和方法 2.掌握SolidWorks草绘特征:拉伸凸台、拉伸切除、旋转凸台、旋转切除、扫描、放样的操 作方法。 3.掌握放置(应用)特征:钻孔特征、倒角特征、圆角特征、抽壳特征、拔模斜度特征、筋的 操作方法 二、实验内容 完成下列下列零件造型 三、实验步骤 1. 连接件设计 完成如图1所示模型。 (1)单击【新建】按钮一1,新建一个零件文件。 (2)选取前视基准面,单击【草图绘制】按钮一I,进入草图绘制,绘制草图,如图2 所示。 图1连接件图2草图 ⑶ 单击【拉伸凸台/基体】按钮,出现【拉伸】属性管理器,在【方向】下拉列表 框内选择【两侧对称】选项,在【深度】文本框内输入" 54mm ”,单击【确定】 按钮,如图3所示。 (4)单击【基准面】按钮一1,出现【基准面】属性管理器,其中第一参考选择图形下底面, 然后单击【两面夹角】按钮日,在【角度】文本框内输入"120°,然后在第二参考中选择 图形的一条下边线。单击【确定】按钮¥,,建立新基准面,如
错误!未找到引用源。所示。 图4建立基准面 (5) 在设计树中右击基准面 1选择“反转法线” 卜,然后再单击基准 面 1单选择 【草图绘制】按钮 ,进入草图绘制,单击【正视于】按钮 ,绘制草图,如图 4所示。 边线 底面 图4草图
(6) 单击【拉伸凸台/基体】按钮 ,出现【拉伸】属性管理 器,在【终止条件】下拉 列表框内选择【给定深度】选项,在【深度】文本框内输入“ 12mm ”,单击【确 定】按钮1 如图5所示。 (7) 选取基体上表面,单击【草图绘制】 按钮_1,进入草图绘制,使用中心线工具 上表面的中心位置绘制直线,注意不要捕捉到表面边线,如图 6所示。 图6中心线 (8) 单击【等距实体】按钮丄,出现【等距实体】属性管理器,在【等距距离】文本框 内输入 “8mm ”,在图形区域选择中心线, 在属性管理器中选中 【添加尺寸】、【选 择链】、【双向】和【顶端加盖】复选框,选中【圆弧】单选按钮,单击【确定】 按钮 ,标注尺寸,完成草图,如图 7所示。 律黑 __________________ 严 玄[B 总 -召 厂[.砲 r 韦歼左眛編◎也 17比自口 R an (A ) 广 Efetfi- 图_7运用“等距实体”绘制草图 (8)单击【拉伸切除】按钮 □,出现【切除-拉伸】属性管理器,在【终止条件】下拉 列表框内选择【完全贯穿】选项,单击【确定】按钮 ,如图8所示。 图5 “拉伸”特征
浙工大过程控制实验报告 202103120423徐天宇过程控制系统实验报告 实验一:系统认识及对象特性测试 一实验目的 1了解实验装置结构和组成及组态软件的组成使用。 2 熟悉智能仪表的使用及实验装置和软件的操作。 3熟悉单容液位过程的数学模型及阶跃响应曲线的实验方法。 4学会有实际测的得单容液位过程的阶跃响应曲线,用相关的方法分别确定它们的参数,辨识过程的数学模型。二实验内容 1 熟悉用MCGS组态的智能仪表过程控制系统。 2 用阶跃响应曲线测定单容液位过程的数学模型。三实验设备 1 AE2000B型过程控制实验装置。 2 计算机,万用表各一台。 3 RS232-485转换器1只,串口线1根,实验连接线若干。四实验原理 如图1-1所示,设水箱的进水量为Q1,出水量为Q2,水箱的液面高度为h,出水阀V2固定于某一开度值。根据物料动态平衡的关系,求得: 在零初始条件下,对上式求拉氏变换,得:
式中,T为水箱的时间常数(注意:阀V2的开度大小会影响到水箱的时间常数),T=R2*C,K=R2为单容对象的放大倍数, R1、R2分别为V1、V2阀的液阻,C 为水箱的容量系数。 阶跃响应曲线法是指通过调节过程的调节阀,使过程的控制输入产生一个阶跃变化,将被控量随时间变化的阶跃响应曲线记录下来,再根据测试记录的响应曲线求取输入输出之间的数学模型。本实验中输入为电动调节阀的开度给定值OP,通过改变电动调节阀的开度给定单容过程以阶跃变化的信号,输出为上水箱的液位高度h。电动调节阀的开度op通过组态软件界面有计算机传给智能仪表,有智能仪表输出范围为:0~100%。水箱液位高度有由传感变送器检测转换为4~20mA的标准信号,在经过智能仪表将该信号上传到计算机的组态中,由组态直接换算成高度值,在计算机窗口中显示。因此,单容液位被控对象的传递函数,是包含了由执行结构到检测装置的所有液位单回路物理关系模型有上述机理建模可知,单容液位过程是带有时滞性的一阶惯性环节,电动调节阀的开度op,近似看成与流量Q1成正比,当电动调节阀的开度op为一常量作为阶跃信号时,该单容液位过程的阶跃响应为 需要说明的是表达式(2-3)是初始量为零的情况,如果是在一个稳定的过程下进行的阶跃响应,即输入量是在原来的基础上叠加上op的变化,则输出表达式是对应原来输出值得基础上的增
土工实验指导书及实验报告编写毕守一 安徽水利水电职业技术学院 二OO九年五月
目录 实验一试样制备 实验二含水率试验 实验三密度试验 实验四液限和塑限试验 实验五颗粒分析试验 实验六固结试验 实验七直接剪切试验 实验八击实试验 土工试验复习题
实验一试样制备 一、概述 试样的制备是获得正确的试验成果的前提,为保证试验成果的可靠性以及试验数据的可比性,应具备一个统一的试样制备方法和程序。 试样的制备可分为原状土的试样制备和扰动土的试样制备。对于原状土的试样制备主要包括土样的开启、描述、切取等程序;而扰动土的制备程序则主要包括风干、碾散、过筛、分样和贮存等预备程序以及击实等制备程序,这些程序步骤的正确与否,都会直接影响到试验成果的可靠性,因此,试样的制备是土工试验工作的首要质量要素。 二、仪器设备 试样制备所需的主要仪器设备,包括: (1)孔径0.5mm、2mm和5mm的细筛; (2)孔径0.075mm的洗筛; (3)称量10kg、最小分度值5g的台秤; (4)称量5000g、最小分度值1g和称量200g、最小分度值0.01g的天平;
(5)不锈钢环刀(内径61.8mm、高20mm;内径79.8mm、高20mm或内径61.8mm、高40mm); (6)击样器:包括活塞、导筒和环刀; (7)其他:切土刀、钢丝锯、碎土工具、烘箱、保湿器、喷水设备、凡士林等。 三、试样制备 (一)原状土试样的制备步骤 1、将土样筒按标明的上下方向放置,剥去蜡封和胶带,开启土样筒取土样。 2、检查土样结构,若土样已扰动,则不应作为制备力学性质试验的试样。 3、根据试验要求确定环刀尺寸,并在环刀内壁涂一薄层凡士林,然后刃口向下放在土样上,将环刀垂直下压,同时用切土刀沿环刀外侧切削土样,边压边削直至土样高出环刀,制样时不得扰动土样。 4、采用钢丝锯或切土刀平整环刀两端土样,然后擦净环刀外壁,称环刀和土的总质量。 5、切削试样时,应对土样的层次、气味、颜色、夹杂物、裂缝和均匀性进行描述。 6、从切削的余土中取代表性试样,供测定含水率以及颗粒分析、界限含水率等试验之用。
上机实验二 SPSS基本运行程序 一、实验目的 通过本次实验,要求掌握SPSS的基本运行程序,熟悉基本的编码方法、了解如何录入数据和建立数据文件,掌握基本的数据文件编辑与修改方法。 二、实验性质 必修,基础层次 三、主要仪器及试材 计算机及SPSS软件 四、实验内容 1.问卷编码 2.录入数据 3.保存数据文件 4.编辑数据文件 五、实验学时 2学时 六、实验方法与步骤 1.开机 2.找到SPSS的快捷按纽或在程序中找到SPSS,打开SPSS 3.认识SPSS数据编辑窗口 4.对一份给出的问卷进行编码和变量定义 5.按要求录入数据 6.练习基本的数据修改编辑方法 7.保存数据文件 8.关闭SPSS,关机。 七、实验注意事项
1.实验中不轻易改动SPSS 的参数设置,以免引起系统运行问题。 2.遇到各种难以处理的问题,请询问指导老师。 3.为保证计算机的安全,上机过程中非经指导老师和实验室管理人员同意,禁止使用软盘与移动硬盘。 4.每次上机,个人应按规定要求使用同一计算机,如因故障需更换,应报指导老师或实验室管理人员同意。 5.上机时间,禁止使用计算机从事与课程无关的工作。 八、上机作业 (一)试对以下问卷进行编码,并录入所选择的答案(加下划线为所选的答案 农户基本经营状况调查 1 家庭户性质:①本地户 ②外来户 (迁入年份:_1988_) 2.就业类型:①纯农户 ②非农户 ③农兼非 ④非兼农 ⑤未就业 离开农业已有__________年 4.兼业者从事非农产业情况 家里有 1 人参加非农劳动,是否壮劳力?① 是 ②否 业务范围:①工业 ②建筑业 ③运输 ④仓储 ⑤餐饮业 ⑥社会服务业 ⑦其他 工作年数 5 年,(按整数算,超过半年算一年) 投入时间大约占全年工作时间的% 70% 收入大约占全年总收入的%_______90%______
SCARA机器人实验指导书哈尔滨科利达智能控制技术有限公司
SCAR/教学机器人简介 KLD—400教学机器人有3个旋转关节,其轴线相互平 行,在平面内进行定位和定向。另一个关节是移动关节,用于完 成末端件在垂直平面的运动。手腕参考点的位置由两旋转关节的 角位移①1和①2,及移动关节的位移Z决定的,即P= f(①1,①2, Z), SCARA教学机器人为平面关节型机器人,本机器人采用 伺服电机和步进电机驱动,控制简单,编程方便, KLD—400 教学机器人是专为满足高等院校机电一体化、自动控制等专业 进行机电及控制课程教学实验需要和相关工业机器人应用培训 需要而最新开发的四自由度机器人,它是一个多输入多输出的动 力学复杂系统,是进行控制系统设计的理想平台;它具有高度的 能动性和灵活性,具有广阔的可达空间,是进行运动规划和编程系统设计的理想对象。除教学和培训外,KLD—400还可用于细小零件的搬运和电子元件的装配等工业作业。 系统特点 ?机构采用平面关节型(SCAR)结构,按工业标准要求设计,速度快、柔性好; ?采用交流伺服电机和谐波减速器等,模块化结构,简单、紧凑,完全满足实验的要求; ; ?控制系统采用Windows系列操作系统,二次开发方便、快捷,适于教学实验 ?提供通用机器人语言编程系统,可通过图形示教自动生成机器人语言等程序; ?提供实验教材,内容涵盖机器人运动学、动力学、控制系统的设计、机器人轨迹规划等。用户可以从中选择相关内容满足不同层次的教学实验需要。 ?性价比高;适于在高等院校大范围推广。 系统配置 ?硬件平台:KLD—400系列伺服运动控制器和微机平台(PC用户自备,带 ISA插槽) ?软件平台:1)Windows操作系统;2)KLD—400机器人图形示教软件 技术参数 结构形式平面关节式(SCARAB) 负载能力1kg 运动精度(脉冲当量/转)关节112800 关节212800 关节3800pulse/mm 关节41600 未端重复定位精度± 0.1mm 每轴最大运动范围关节10~270° 关节20~200° 关节30~60mm 关节40~345°
实验二类与对象㈡——对象初始化、对象数据与指针 一、实验目的 1.理解构造函数、析构函数的意义及作用,掌握构造函数、析构函数的定义及调用时间,熟悉构造函数的种类; 2.理解this指针及使用方法,熟悉对象数组、对象指针、对象引用的定义及使用方法,熟悉对象作为函数参数的使用方法; 3.熟悉类与对象的应用及编程。 二、实验学时 课内实验:2课时课外练习:2课时 三本实验涉及的新知识 ㈠构造函数与析构函数 在C++中,提供了两个特殊的成员函数,即构造函数和析构函数。 构造函数用于对象的初始化,即在定义一个类对象时,计算机在给对象分配相应的存储单元的同时,为对象的数据成员赋初值。 析构执行的是与构造函数相反的操作,用于撤销对象的同时释放对象所占用的内存空间。 1.构造函数 ⑴构造函数的定义 格式: 类名(形参表) { 构造函数体} ⑵构造函数的调用 构造函数的调用是在定义对象时调用的。 格式:类名对象名(实参表); 类名对象名=构造函数名(实参表); ⑶说明 ①构造函数必须与类同名。 ②构造函数没有返回值,但不能在构造函数前加void类型符(其他没有返回值的成员函数必须加类型符void)。 ③在实际应用中,在定义类时通常应定义一至多个构造函数(重载),以对各数据成员进行初始化;如果不给出构造函数,系统将自定义一个构造函数。 ④构造函数可以可以带参数,也可不带任何参数(称无参构选函数),还可以使用缺省参数。 ⑤不能象普通成员函数一样单独调用。 2.析构函数 ⑴析构函数的定义 格式: ~类名(void) { 析构函数体} ⑵析构函数的调用 析构函数是在撤销对象时自动调用的。 ⑶说明
一、过程控制仪表认识实验 一、实验目的 1、熟悉装置的具体结构、明确各部件的作用。 2、掌握常用传感器的工作原理及使用方法。 二、实验内容 1、水箱 本装置包括上水箱、中水箱、下水箱和储水箱,上、中、下三个水箱都有三个槽,分别是缓冲槽、工作槽和溢流槽。实验时,水流首先进入缓冲槽(可减小水流对工作槽的冲击),当缓冲槽中注满水时,水流便溢出到工作槽。 整个装置的管道都采用铝塑管,以防止阀门生锈。 打开储水箱后的小球阀可排出水箱中的水,另外还可排出空气,以防抽不上水。 2、微型锅炉、纯滞后系统、热电阻 本装置采用锅炉进行温度实验,锅炉用不锈钢材料制作,共有四层,从内向外依次是加热层、冷却层、溢流层和纯滞后管道层(盘管长达20米)。 热电阻为Pt100,三线制工作。 温度变送器内部已有内置电源,不能再接外加电源。 系统用2Kw的加热丝进行加热,并采用可控硅移相触发模块(移相触发角与输入电流成正比),本模块输入为4—20mA的标准电流,输出为380V的交流电。 3、液位传感器 本装置采用扩散硅压力变送器(不锈钢隔离膜片),标准二线制进行传输,因此工作时需要串接24V电源。 压力变送器通电15分钟后,方可调整零点和量程。使用的原则是:没通电,不加压;先卸压,再断电。 零点调整:在水箱液位为零时,调整输出电流表的读数为4mA。 满量程调整:在水箱加满水时,调整输出电流表的读数为20mA。
调整的原则是:先调零点,再调满量程,要反复多次调整(满量程调整后会影响零点)。 4、电动调节阀 采用德国PS公司生产的PSL 202型智能电动调节阀。调节阀由220V50HZ电源供电。工作环境温度为-20—70摄氏度,输入信号为4—20mA的控制信号,输出信号为4—20mA 的阀位信号。 5、变频器 采用日本三菱FR-S520变频器,内控为0—50HZ,外控为4—20mA,可通过控制屏上的双掷开关进行切换。 内控:上电时,EXT灯先亮,开关打到内控,Run灯亮,开始内控变频控制水泵。 外控:开关打到外控,按PU/EXT键,使EXT灯亮,按Run运行,按Stop停运。 内外控切换时,要注意按键和开关配合使用。 6、水泵 采用丹麦格兰富水泵,扬程高达10米,噪音很低。 7、流量计 流量计由流量传感器和转换器组成。 采用LDS-10S型电磁流量传感器,其流量为0—0.3立方米/秒,压力为1.6Mpa,4—20mA 标准输出,可与显示、记录仪表、积算器配套,避免了涡轮流量计非线性与死区大的缺点。 转换器采用LDZ-4型电磁流量转换器。 它为内置电源。 8、调节器 采用上海万迅公司的AI全通用人工智能调节器。708型为模糊控制器,818型为PID 控制器。 输入为1、2端子,输入为1—5V。 输出为7、8端子,输出为4—20mA。 主要功能是:接受反馈信号Vi,与给定Vs进行比较,得到偏差,并对偏差进行PID连续运算,通过改变PID参数,可改变控制作用。
请大家按照以下要求更改自己负责的实验(实训)指导书 一、最大标题1 宋体二号加粗居中单倍行距两个空格 二、最大标题2 宋体三号加粗居中 1.5倍行距两个空格 三、一级标题宋体小四加粗两端对齐首行缩进2个字符 1.5倍行距顶格 四、正文宋体小四常规两端对齐首行缩进2个字符 1.5倍行距 五、正文页边距左、右、上2.5cm。下2.1cm 六、注意事项: 1.最重要的是内容不能出错,前后语句要连贯,意思表达完成。 2.标点符号要使用准确。 3.每个结束句子后面要有句号。 4.所有标题号手动输入,不能自动生成。 5.标题级别:一、(一)1.(1)① 七、请大家在群里原文件更改,更改后的文件写上姓名+负责课程(王旭霞+人体解剖学) 八、附件一、附件二模板。
实验指导书模板二: 第二部分内科护理学(最大标题1) 实训一胸腔穿刺术(最大标题2) 一、实训目的(一级标题) (一)胸腔积液性质不明者,抽取积液检查,协助病因诊断。(二级标题) (二)胸腔内大量积液或积气者,抽取积液或积气,以缓解压迫症状,避免胸膜粘连增厚。 (三)脓胸抽脓灌洗治疗,或恶性胸腔积液需胸腔内注人药物者。 二、实训仪器 (一)胸腔穿刺包:内含弯盘2个、尾部连接乳胶管的16号和18号胸腔穿刺针各1根、中弯止血钳4把孔巾1块、巾钳2把、棉球10个纱布2块、小消毒杯2个、标本留置小瓶5个。 (二)消毒用品:2.5%碘酊和75%酒精,或0.5%碘伏。 (三)麻醉药物:2%利多卡因5ml。 三、实训内容 (一)患者体位抽液时,协助患者反坐于靠背椅上,双手放椅背上或取坐位,使用床旁桌支托;亦可仰卧于床上,举起上臂;完全暴露胸部或背部。如患者不能坐直,还可来用侧卧位,床头抬高30°抽气时,协助患者取半卧位。 (二)穿刺部位一般胸腔积液的穿刺点在肩胛线或腋后线第7-8肋间隙或腋前线第5肋间隙。气胸者取患侧锁骨中线第2肋间隙或腋前线第4-5肋间隙进针。 (三)穿刺方法常规消毒皮肤,局部麻醉。术者左手食指和拇指固定穿刺部位的皮肤,右手将穿刺针在局部麻醉处沿下位肋骨上缘缓慢刺人胸壁直达胸膜。连接注射器,在助手协助下抽取胸腔积液或气体,穿刺过程中应避免损伤脏层胸膜,并注意保持密闭,防止发生气胸。术毕拔出穿刺针,再次消毒穿刺点后,覆盖无菌敷料,稍用力压迫容刺部位片刻。 四、注意事项 (一)术前护理 1.心理准备向患者及家属解释穿刺目的操作步骤及术中注意事项,协助患者做好
《数控机床》 实 验 指 导 书 (简本) 蚌埠学院机电系李大胜2008年9月修订
实验一数控车床操作模拟(计算机仿真) 一、实验目的和要求 数控加工在制造业中占有非常重要的地位,数控机床是一种高效的自动化设备,它可以按照预先编制好的零件数控加工程序自动地对工件进行加工。宇航数控加工仿真系统可以在计算机屏幕上仿真完成数控加工程序的输入输出、数控机床操作、工件加工、虚拟测量等数控加工全过程,而且在数控加工仿真系统中,机床操作面板和操作步骤与相应的实际数控机床完全相同,学生在这种虚拟工业环境中可以学习掌握典型数控车床的加工操作方法,通过数控加工仿真系统可以使培训得到实物操作训练的目的,本次实验主要要求学生了解宇航仿真软件的使用和熟悉配备主流数控系统的数控车床的操作及对刀方法。 二、实验内容 1、了解数控车床的基本运动、加工对象及其用途; 2、了解数控车床操作面板各按键(CNC界面)的功用; 3、掌握数控车床的调整及加工前的准备工作、尤其要熟练掌握FANUC0i系统的多种对刀方法; 三、实验仪器 软件要求:宇航数控仿真系统30节点 硬件要求:微机30台 四、实验内容及步骤 YHCNC仿真系统及虚拟机床操作(FANUC 0i) 1、机床操作面板 机床操作面板位于窗口的右下侧,如下图所示,主要用于控制机床运行状态,由模式选择按钮、运行控制开关等多个部分组成,每一部分的详细说明如下: FANUC 0i面板 AUTO:自动加工模式。EDIT:编辑模式。MDI:手动数据输入。 INC:增量进给。 HND:手轮模式移动机床。 JOG:手动模式,手动连续移动机床。 REF:回参考点。