(重要)并行计算PC机群的构建
- 格式:doc
- 大小:4.28 MB
- 文档页数:32
2012.448基于PC 集群的 MPI 并行环境的搭建希润高娃内蒙古师范大学计算机与信息工程学院 内蒙古 010022摘要:集群是充分利用计算资源的一个重要概念,PC 集群是最易构建的分布式并行计算环境。
MPI 是应用最广的并行程序设计平台。
本文通过实例阐述PC 集群及PC 集群上的MPI 并行计算环境的搭建。
关键词:集群;PC 集群;MPI ;并行0 引言高性能仍是计算机领域的重要目标。
并行计算的不断发展推动着高性能计算的发展,利用集群系统的并行计算技术已被认为是未来解决大数据量问题或商业计算的导向。
集群能够充分利用现有的闲置计算机资源,而且还能够使用较低配置的软硬件,来实现较高性能的计算。
随着处理器技术和高性能网络技术的飞速发展,以及软件工具的改善,PC 的性能不断的提高,价格越来越廉价,性价比已远远优于工作站,而PC 集群也成为了高性价比的并行计算资源。
所以基于PC 的并行计算环境及其上的并行算法的研究是很有价值和意义的。
MPI(Message Passing Interface)是基于消息传递编写并行程序的一种用户界面,是一个并行函数库的标准,是可移植的标准平台。
MPI 具有内定和用户自定义的数据汇集操作功能,可以把大量数据进行打包后传输;能有效地管理消息、缓存区,具有结构化缓存,扩充数据类型及异构性,能实现完全异步的点对点通信,发送与接收操作可以完全与计算操作交叉进行。
MP 移植性好、功能强大、效率高、硬件平台支持度高等多种优点,使它成为了研究和应用的重要并行环境。
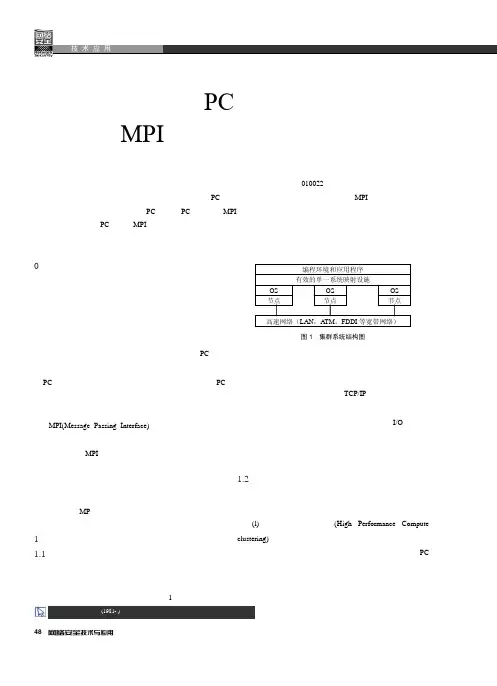
1 集群1.1 集群系统结构集群是一组协同工作的服务实体,用以提供比单一服务实体更具扩展性和可用性的服务平台,属于分布式存储的并行计算机结构,典型的集群系统结构如图1所示。
图1 集群系统结构图集群通过计算机高速网络将一群工作节点连接起来,充分利用各个节点的各种资源,统一调度,协调处理,以实现高效率的并行计算。
其高速网络可以是普通的局域网也可以是高速网络,而通信协议一般是TCP/IP 协议。
并行计算PC机群的构建随着计算机硬件技术的高速发展,处理器和网络的性能不断地迅速提高和价格的日益下降,使得并行计算日益从传统的超级计算平台转移到由一组高性能节点或工作站/PC机构成的称之为机群的计算平台上,从而机群成为构建可扩放并行计算机的一大趋势。
机群在计算机界有很多称呼,其中松耦合的工作站/PC机群也被称为工作站机群COW(Cluster of Workstation)或工作站网络NOW(Network of Workstation);而紧耦合的高性能服务器节点机群也被称为构筑高端大规模并行机的机群系统(如SP2和Option Red)。
本文将主要从PC机群软、硬件环境的选择及配置出发给出一个逐步的PC机群构建手册,以使广大的科研工作者能够更为方便的在PC机群环境中开展自己的工作。
并行计算机群是目前由于硬件的时效性很强,所以给出例子的意义并不是很大。
我们这里给出一套配置主要是为了以后叙述的方便,读者应该根据当前最新的硬件信息进行选择。
1 PC机群硬件部件的选择在PC机群的构建过程中,硬件部件应根据所要部署应用的类型又针对性的加以选择,具体原则请参见《并行算法实践》第2.2节(硬件的选择与安装)。
本文沿用该章所给出的示例配置,如下:该PC机群包括1个服务节点(兼作计算节点)和63个计算节点。
(1)服务节点配置:CPU:Pentium Ⅳ2.0G(512KB全速二级缓存)内存:1G(2⨯512M)Rambus硬盘:80GB IDE主板:ASUS P4T Socket 423网卡:3com 905 –TX(两个)显卡、显示器、键盘、鼠标、光驱、软驱:略(2)计算节点配置:CPU:Pentium Ⅳ1.5G(512KB全速二级缓存)内存:512MB(2⨯256M)Rambus硬盘:40GB IDE主板:ASUS P4T Socket 423网卡:3com 905 –TX另外,交换设备由2个3com 3c16980和1个3com 3c16985的交换机通过一个matrix module堆叠而成,并安装了一个千兆光纤模块,以备服务接点连接内部机群的网卡升级为千兆网卡。
并行计算机体系结构与应用一、介绍并行计算机是一种基于多处理器系统的计算机,将一个大问题分成多个小问题,每个处理器同时解决一个小问题,然后将所有的结果合并起来得到最终结果。
并行计算机的主要特点是高性能和可扩展性。
在计算密集型应用中,它比传统的单处理器计算机有更好的性能表现。
在本文中,我们将介绍并行计算机体系结构和应用。
二、并行计算机体系结构并行计算机体系结构可以分为共享内存和分布式内存两种类型。
共享内存并行计算机中,所有处理器共享系统内存,每个处理器可以访问内存中的任何数据。
分布式内存并行计算机中,处理器之间没有共享内存,它们通过网络互连。
每个处理器只能访问它本地的内存。
1、共享内存并行计算机在共享内存并行计算机中,所有的处理器都共享一个物理内存。
当一个处理器需要访问内存的时候,它会向内存发出请求。
内存控制器会负责处理请求,并将数据保存在缓存中,如果其它处理器要访问相同的数据,那么它们可以从缓存中取出数据,这可以节省大量的访问时间。
共享内存并行计算机的优点是处理器之间可以共享数据,并且程序员不需要考虑数据的分配问题。
但是,这种体系结构也存在一些缺点,比如内存访问冲突和缺乏可靠性。
2、分布式内存并行计算机在分布式内存并行计算机中,每个处理器都有自己的物理内存,它们通过网络互连。
处理器之间的通信是通过发送和接收消息来完成的。
在分布式内存并行计算机中,处理器需要显式地将数据发送到其它处理器,这使得程序员需要考虑数据的分配问题。
然而,分布式内存并行计算机可以通过增加处理器的数量来提高性能,比共享内存并行计算机更具有扩展性。
三、并行计算机应用并行计算机的主要应用是在大型科学计算和工程领域。
以下是一些常见的应用领域:1、气象模拟气象模拟需要处理海量的数据,并且需要比较高的计算性能。
使用并行计算机可以加快气象模拟的速度,从而提高预报准确性。
2、生物信息学生物信息学需要处理大量的基因数据和蛋白质数据。
这些数据的处理需要快速和准确地分析和比较。
并行计算环境搭建一.搭建并调试并行计算环境MPI的详细过程。
1.首先,我们选择在Windows XP平台下安装MPICH。
第一步确保Windows平台下安装上了.net框架。
2.在并行环境的每台机子上创建相同的用户名和密码,并使该平台下的各台主机在相同的工作组中。
3.登陆到新创建的帐号下,安装MPICH软件,在选择安装路径时,每台机子的安装路径要确保一致。
安装过程中,需要输入一致的passphrase,也即本机的用户名。
4.安装好软件后,要对并行环境进行配置(分为两步):第一步:注册。
在每台机器上运行wmpiregister,按照提示输入帐号和密码,即本机的登录用户名和密码。
第二步:配置主机。
在并行环境下,我们只有一台主机,其他机子作为端结点。
运行主机上的wmpiconfig,在界面左侧栏目中选择TNP工作组,点击“select”按钮,此时主机会在网络中搜索配置好并行环境的其他机子。
配置好并行环境的其他机子会出现绿色状态,点击“apply”按钮,最后点击“OK”按钮。
5.在并行环境下运行的必须是.exe文件,所以我们必须要对并行程序进行编译并生成.exe文件。
为此我们选择Visual C++6.0编译器对我们的C语言程序进行编译,在编译过程中,主要要配置编译器环境:(1)在编译器环境下选择“工程”,在“link”选项卡的“object/library modules”中输入mpi.lib,然后点击“OK”按钮。
(2)选择“选项”,点击“路径”选项卡,在“show directories for”下选择“Include files”,在“Directories”中输入MPICH软件中“Include”文件夹的路径;在“show directories for”下选择“Library files”,在“Directories”中输入MPICH软件中Library文件夹的路径,点击“OK”。
(3)对并行程序进行编译、链接,并生成.exe文件。
第11章__并行计算机体系结构简介1. 引言随着计算机应用的不断发展,对计算机性能和计算能力的需求越来越高,而单一计算机性能的提升已经达到了瓶颈。
面对这种情况,计算机学科开始关注并行计算机。
并行计算机的提出,为解决单一计算机的性能瓶颈开辟了一条新的道路。
本章将简要介绍并行计算机体系结构。
2. 并行计算机的概念并行计算机是使用并行处理器(即多个处理器)来执行并行任务的计算机。
并行处理器是一种能够在同一时间内处理多个指令或多个数据的处理器,因此对于需要进行大量计算的应用程序而言,使用并行计算机可以大大提高计算速度。
并行计算机可以分类为以下三类:(1)指令级并行计算机:每个指令被分成数个步骤,不同步骤可以并行执行,以提高计算速度。
(2)进程级并行计算机:多个处理器执行不同的程序或进程,从而提高计算速度。
(3)数据级并行计算机:多个处理器对同一数据进行不同的计算,以提高计算速度。
3. 并行计算机的体系结构并行计算机的体系结构包括处理器阵列、多处理器、超级计算机等。
(1)处理器阵列:处理器阵列是由多个同构的处理器组成的结构,每个处理器都有自己的主存储器和指令流。
处理器阵列相对简单,但是需要使用特殊的编程技术,在编写并行程序时需要考虑负载平衡、同步和通信等问题。
(2)多处理器:多处理器是由多个不同类型的处理器组成的计算机系统,这些处理器可以是同构的,也可以是异构的。
多处理器系统采用共享存储器结构或分布式内存结构。
由于多处理器系统特点是强一致性和数据共享,它需要使用特殊算法来避免死锁和竞争条件等问题。
(3)超级计算机:超级计算机是由数千个处理器组成的计算机系统,它的计算能力是常规计算机的数十倍或数百倍。
超级计算机一般使用NUMA结构、MPP结构或混合结构,采用分布式内存结构可以有效解决存储器容量的限制问题,同时使用高速互联技术可以提高计算速度。
4. 并行计算机的优缺点并行计算机相对于单一计算机性能的优势主要体现在以下几个方面:(1)计算速度快:并行计算机可以同时执行多个任务,因此可以大大缩短计算时间。
计算机科学中的并行计算架构设计随着数据量的不断增大,计算机科学界对并行计算架构的研究日趋重要。
在并行计算中,计算任务被分成多个子任务,这些子任务被同时执行,从而提高计算效率。
而并行计算架构的设计则是保证计算机系统可以充分利用并行计算的优势,实现任务的高效协同。
本文将探讨计算机科学中的并行计算架构设计,重点关注并行计算的基本原理、并行计算架构的设计过程以及并行计算在各个领域的实际应用。
并行计算的基本原理并行计算的核心思想是将单个计算任务分割成多个子任务,每个子任务被分配到不同的计算单元中同时执行。
这些计算单元可以是多个处理器、多个计算机节点或者多个计算核心。
在并行计算执行过程中,每个计算单元可以同时进行自己的计算任务,不需要等待其他计算单元的任务完成。
在并行计算中,计算任务被分割成多个子任务,并行执行。
同时执行的子任务可以被视为一个并行计算流程,这个流程被称为进程。
在每个进程中,数据被分块存储,并分配到不同的计算单元中进行处理。
计算单元之间的通信被称为消息传递,通常采用消息队列的形式进行实现。
通过这种方式,每个进程可以在自己的计算单元中独立的进行任务执行,同时也可以通过消息传递机制与其他进程进行数据交换。
并行计算架构的设计过程在并行计算架构的设计过程中,需要关注多个方面。
其中最重要的包括并行计算的吞吐量、并行计算的负载均衡、计算节点之间的消息传递效率以及并行计算的容错性等。
吞吐量在并行计算中,吞吐量指的是系统在处理计算任务时能够达到的最大速度。
提高吞吐量的方法包括增加计算单元数量、优化通信协议、以及优化计算任务的分布等。
负载均衡在并行计算中,负载均衡指的是将计算任务分配到不同的计算单元中,以达到最大的计算效率。
负载均衡的设计需要考虑多方面因素,例如任务的数量、任务的计算复杂度、计算节点的性能等因素。
通过合理的负载均衡设计,可以避免单个计算节点因为负载过重导致任务执行效率低下,从而提高并行计算的整体效率。
并行计算PC机群的构建随着计算机硬件技术的高速发展,处理器和网络的性能不断地迅速提高和价格的日益下降,使得并行计算日益从传统的超级计算平台转移到由一组高性能节点或工作站/PC机构成的称之为机群的计算平台上,从而机群成为构建可扩放并行计算机的一大趋势。
机群在计算机界有很多称呼,其中松耦合的工作站/PC机群也被称为工作站机群COW(Cluster of Workstation)或工作站网络NOW(Network of Workstation);而紧耦合的高性能服务器节点机群也被称为构筑高端大规模并行机的机群系统(如SP2和Option Red)。
本文将主要从PC机群软、硬件环境的选择及配置出发给出一个逐步的PC机群构建手册,以使广大的科研工作者能够更为方便的在PC机群环境中开展自己的工作。
并行计算机群是目前由于硬件的时效性很强,所以给出例子的意义并不是很大。
我们这里给出一套配置主要是为了以后叙述的方便,读者应该根据当前最新的硬件信息进行选择。
1 PC机群硬件部件的选择在PC机群的构建过程中,硬件部件应根据所要部署应用的类型又针对性的加以选择,具体原则请参见《并行算法实践》第2.2节(硬件的选择与安装)。
本文沿用该章所给出的示例配置,如下:该PC机群包括1个服务节点(兼作计算节点)和63个计算节点。
(1)服务节点配置:CPU:Pentium Ⅳ2.0G(512KB全速二级缓存)内存:1G(2⨯512M)Rambus硬盘:80GB IDE主板:ASUS P4T Socket 423网卡:3com 905 –TX(两个)显卡、显示器、键盘、鼠标、光驱、软驱:略(2)计算节点配置:CPU:Pentium Ⅳ1.5G(512KB全速二级缓存)内存:512MB(2⨯256M)Rambus硬盘:40GB IDE主板:ASUS P4T Socket 423网卡:3com 905 –TX另外,交换设备由2个3com 3c16980和1个3com 3c16985的交换机通过一个matrix module堆叠而成,并安装了一个千兆光纤模块,以备服务接点连接内部机群的网卡升级为千兆网卡。
如何构建并行计算框架构建一个并行计算框架需要考虑多个方面,包括任务调度、并行计算模型和资源管理等。
以下是一个构建并行计算框架的简单步骤和关键要点:1.设计并行计算模型:-首先,需要明确并行计算的目标和需求。
确定需要处理的任务类型、数据规模和预期性能。
- 然后,选择合适的并行计算模型。
常见的并行计算模型包括分布式内存计算模型(如MapReduce),并行数据库计算模型和共享内存计算模型。
-根据任务类型和数据规模,选择合适的并行算法和数据结构。
考虑任务间的依赖关系,确定任务之间的调度顺序。
2.任务调度:-设计一个任务调度器,负责将任务分配给各个计算节点。
根据任务的优先级和调度策略,动态调整任务的分配和调度。
-考虑任务调度的负载均衡问题,尽量保证各个计算节点的负载均衡,提高系统的整体性能。
-使用基于优先级的调度算法,提高任务的执行效率。
3.并行计算:-在并行计算框架中,需要实现任务的并行执行。
可以使用线程池或任务队列等方式,将任务分配给多个工作线程并行处理。
-确保任务之间的数据访问互斥,避免并发冲突。
可以使用互斥锁、信号量等机制,保证对共享数据的访问线程安全。
4.数据管理:-并行计算框架需要管理大量的数据,包括输入数据和计算中间结果。
设计一个高效的数据管理策略,尽量减少数据的传输和复制。
-考虑数据分区和数据划分的问题。
根据数据的特点和计算任务的需求,将数据划分为适当的块,分配给不同的计算节点并行处理。
5.故障处理:-并行计算框架需要具备一定的容错能力。
设计一个故障检测和恢复机制,能够及时发现计算节点的故障,并将任务重新分配给其他可用节点处理。
-考虑任务中断和数据丢失的情况,设计相应的容错策略和数据恢复机制。
6.性能优化:-对于大规模并行计算框架,性能优化是非常重要的。
可以采用一些优化手段,提高并行计算的效率。
如任务并行度的调整、任务的粒度控制、数据局部性的优化等。
-使用性能分析工具进行性能测试和性能调优,定期检查系统的性能指标,寻找优化的空间。
并⾏计算机系统结构
并⾏计算机系统结构
1. 并⾏计算机结构模型
1. 单指令流多数据流机SIMD(Single Instruction Multiple Data);
2. 并⾏向量计算机PVP(Parallel Vector Processor);
3. 对称多处理机SMP(Symmetric MultiProcessor);
4. ⼤规模并⾏处理机MPP(Massively Parallel Processor);
5. 分布式共享存储DSM(Distributed Shared Memory)
6. 多处理机和⼯作站机群COW(Cluster Of Workstation)(现在常称之为机群)。
1. 并⾏计算机访存模型
1. UMA(Uniform Memory Access)模型是均匀存储访问模型的简称。
2. NUMA(Nonuniform Memory Access)模型是⾮均匀存储访问模型的简称。
3. COMA(Cache-Only Memory Access)模型是全⾼速缓存存储访问的简称。
4. CC-NUMA(Coherent-Cache Nonuniform Memory Access)模型是⾼速缓存⼀致性⾮均匀存储访问模型的简称。
5. NORMA(No-Remote Memory Access)模型是⾮远程存储访问模型的简称。
并行计算机系统设计的方法与技术随着科技的发展和信息化的加速,计算机系统成为我们日常生活和工作中不可或缺的重要工具,然而,单核心计算机的瓶颈逐渐显现,为了提升计算机的运算速度和性能,人们开始研究并行计算机系统的设计和优化。
本文将介绍并行计算机系统设计的方法与技术。
一、并行计算机系统的定义与发展并行计算机系统是指由多个处理器组成的计算机系统,在这个系统中,各个处理器能够并行地进行任务分配和任务执行,从而提高整个系统的计算速度和运算效率。
并行计算机系统具有高并行度、高可扩展性和高性能等显著优势,被广泛应用于大型计算和复杂模拟等领域。
近年来,并行计算机系统的发展呈现出以下几个趋势:1. 硬件并行化。
随着集成电路技术的不断发展和计算机硬件的不断更新,多核心处理器、GPU和FPGA等硬件设备的出现,为并行计算机系统的发展提供了更加强大的支持。
2. 软件并行化。
软件并行化是指通过编写多线程程序或分布式程序实现并行计算的方法,软件并行化技术已经成为并行计算机系统中的核心技术。
3. 面向数据中心的发展。
随着云计算和大数据技术的兴起,面向数据中心的并行计算机系统成为未来发展的重要方向,这种系统能够实现高效的数据处理和存储管理,同时能够满足大规模科学计算和商业应用的需求。
二、并行计算机系统设计的方法并行计算机系统是由多个处理器和存储单元组成的多级体系结构,设计并行计算机系统的方法需要考虑以下几个方面:1. 处理器选择。
选择处理器的时候需要考虑处理器的性能、能耗和成本等指标,同时还需要考虑处理器的并行化特性和并发调度算法等因素。
2. 存储结构设计。
存储结构设计是并行计算机系统设计中的重要环节,需要从存储器的容量、访问速度和并行访问能力等方面设计存储结构。
3. 网络拓扑选择。
网络拓扑是指各个处理器之间的通信方式和路径,不同的网络拓扑具有不同的性能和成本特性,需要根据实际需求选择合适数量和适当拓扑的网络结构。
4. 编程模型选择。
计算机专业的并行计算架构随着科技的不断发展和计算机应用的广泛普及,计算机专业中的并行计算架构也变得越来越重要。
本文将探讨并行计算架构的基本概念、发展历程以及其在计算机专业中的应用。
一、并行计算架构的基本概念并行计算架构是一种计算模型,旨在通过同时执行多个计算任务,加快计算速度和提高系统性能。
与传统的串行计算相比,它具有更高的计算能力和处理效率。
并行计算架构可以通过多个处理单元同时执行计算任务,并通过互连网络进行通信和协调。
目前较为常见的并行计算架构包括向量处理器、多核处理器、分布式计算系统和图形处理器(GPU)等。
每种架构都有着不同的特点和适用范围,可以根据具体应用场景选择适合的架构。
二、并行计算架构的发展历程1. 向量处理器(Vector Processor)向量处理器是早期的并行计算架构,通过同时处理多个数据元素来提高计算效率。
它具有广泛的应用场景,在科学计算、图像处理和数字信号处理等领域得到了广泛应用。
2. 多核处理器(Multi-core Processor)多核处理器是在一颗芯片上集成多个处理核心,每个核心可以独立执行指令和计算任务。
多核处理器具有更高的并行性和计算能力,可以提供更强大的计算性能和更高的效率。
3. 分布式计算系统(Distributed Computing System)分布式计算系统是由多个计算节点组成的系统,节点之间可以通过网络进行通信和协作。
分布式计算系统通过将任务划分为多个子任务,由不同的节点同时执行,从而提高计算效率和系统性能。
4. 图形处理器(GPU)图形处理器最初设计用于图形渲染和计算机图形学等领域,但随着其计算能力的不断提升,逐渐被应用于并行计算。
GPU具有大量的处理核心和高带宽的内存系统,可以并行执行大规模的计算任务,广泛应用于科学计算、机器学习和人工智能等领域。
三、并行计算架构在计算机专业中的应用1. 科学计算在科学计算领域,许多复杂的计算任务需要大量的计算资源和高性能的计算平台。
如何构建并行计算框架随着计算机性能的飞速发展,越来越多的应用程序需要处理大规模数据和高复杂度计算的问题。
在这种情况下,串行计算的效率远远不能满足用户需求。
因此,并行计算成为了许多科学计算和工程应用程序的首选方案。
但是,并行计算框架的构建是一件非常复杂和困难的任务,需要涉及到许多专业的知识和技术。
本文将探讨如何构建一个有效的并行计算框架,并介绍一些重要的技术和策略。
1.理清需求和目标在构建并行计算框架之前,首先需要理清自己的需求和目标。
这是非常重要的,因为不同的应用程序有不同的需求和目标,需要选择不同的并行计算策略和技术。
例如,有些应用程序需要大量的计算能力,而有些应用程序需要高度的数据通信效率,还有些应用程序需要支持分布式和异构计算。
因此,在设计并行计算框架之前,需要考虑以下几个问题:(1)应用程序的计算需求和通信需求是什么?(2)应用程序需要支持分布式和异构计算吗?(3)并行计算框架需要具备何种可扩展性和容错性?(4)并行计算框架需要支持何种编程模型和接口?理清这些问题之后,才能开始构建一个合适的并行计算框架。
2.选择适当的并行计算策略并行计算的本质是将一个大任务分成若干个小任务,每个小任务在不同的处理器上并行执行,最终将各个子任务的结果合并起来得到整体结果。
在实际应用中,有许多并行计算策略可以选择,包括:数据并行、任务并行、模型并行、域分解、流水线等。
这些策略各有优缺点,需要根据具体应用场景和需求选择合适的策略。
3.设计并行计算框架的架构并行计算框架的架构是指并行计算环境中的软件和硬件结构,包括处理器和存储器的组织方式、通信和同步机制、任务调度和资源管理等。
在设计并行计算框架架构时,需要考虑以下几个方面:(1)处理器和存储器的组织方式:并行计算框架需要确定处理器和存储器的数量和布局方式,以便支持不同的并行计算策略和应用程序特点。
另外,还需要考虑计算节点之间的通信方式,包括共享内存、分布式内存、消息传递等。
并行计算PC机群的构建1 PC机群硬件部件的选择 (1)2 PC机群软件环境的配置 (2)2.1 OS的选择与安装 (2)2.2 单一登录(Single Sign On)的构建 (2)2.3 单一文件系统(Single File System)的构建 (9)2.4 并行编程环境(Parallel Programming Environment)的构建 .. 162.5 单一作业管理系统(Single Job Management System)的构建 213 结束语 (32)随着计算机硬件技术的高速发展,处理器和网络的性能不断地迅速提高和价格的日益下降,使得并行计算日益从传统的超级计算平台转移到由一组高性能节点或工作站/PC机构成的称之为机群的计算平台上,从而机群成为构建可扩放并行计算机的一大趋势。
机群在计算机界有很多称呼,其中松耦合的工作站/PC机群也被称为工作站机群COW(Cluster of Workstation)或工作站网络NOW(Network of Workstation);而紧耦合的高性能服务器节点机群也被称为构筑高端大规模并行机的机群系统(如SP2和Option Red)。
本文将主要从PC机群软、硬件环境的选择及配置出发给出一个逐步的PC机群构建手册,以使广大的科研工作者能够更为方便的在PC机群环境中开展自己的工作。
并行计算机群是目前由于硬件的时效性很强,所以给出例子的意义并不是很大。
我们这里给出一套配置主要是为了以后叙述的方便,读者应该根据当前最新的硬件信息进行选择。
1 PC机群硬件部件的选择在PC机群的构建过程中,硬件部件应根据所要部署应用的类型又针对性的加以选择,具体原则请参见《并行算法实践》第2.2节(硬件的选择与安装)。
本文沿用该章所给出的示例配置,如下:该PC机群包括1个服务节点(兼作计算节点)和63个计算节点。
(1)服务节点配置:CPU:Pentium Ⅳ2.0G(512KB全速二级缓存)内存:1G(2⨯512M)Rambus硬盘:80GB IDE主板:ASUS P4T Socket 423网卡:3com 905 –TX(两个)显卡、显示器、键盘、鼠标、光驱、软驱:略(2)计算节点配置:CPU:Pentium Ⅳ1.5G(512KB全速二级缓存)内存:512MB(2⨯256M)Rambus硬盘:40GB IDE主板:ASUS P4T Socket 423网卡:3com 905 –TX另外,交换设备由2个3com 3c16980和1个3com 3c16985的交换机通过一个matrix module堆叠而成,并安装了一个千兆光纤模块,以备服务接点连接内部机群的网卡升级为千兆网卡。
据此配置清单,从市场上采购硬件并连接成功后便可以开始机群软件环境的配置。
2 PC机群软件环境的配置如《并行算法实践》第2.2节(软件的选择与安装)本节将主要讲述如何在Linux环境下构建并行计算PC机群的软件环境。
2.1 OS的选择与安装Linux是目前构建高性能计算机群的一个最佳的选择。
在众多的Linux发行版本中,还要考虑的是系统管理工具的友好性,这一点Redhat与Suse的工作是成功的;同时系统功能的可裁剪性也是很重要的,如Debian系统在这一点上做的就非常出色。
在此笔者建议对Linux系统有比较深入认识的读者可选用Debian作为系统平台,因为De bian能够根据用户的需要最精确的选择安装、更新相应的软件包,避免过多的冗余服务占用系统资源,最大限度的满足用户对性能的要求;若是Linux系统的入门者则选用Redhat或Su se较为合适,因为这些发行版本提供了较为友好的用户安装、使用界面,并且配备了图形化的系统管理工具,避免了众多的命令行操作。
在所创建的示例机群中使用的是Redhat 9.0版本(内核2.4.28)。
介绍Linux系统具体安装的书籍有很多,这里就不再敷述。
安装过程中请选择“定制”,并在“选择软件包组”时在默认的基础上选中【服务器】|【网络服务器】(telnet-server、rsh-server)、【服务器】|【服务器配置工具】(NFS等服务器配置工具)、【开发】|【开发工具】(gcc等基本开发工具)、【系统】|【管理工具】(图形化的系统管理工具)等软件包组。
操作系统安装完毕后,我们假设具有如下信息:服务节点主机名为“node0”,IP地址为“192.168.0.100”;计算节点相应的主机名为“n ode[1..63]”,IP地址为“192.168.0.[1..63]”。
2.2 单一登录(Single Sign On)的构建用户可以从机群系统的任何一个节点登录,而且在整个作业执行过程中只需登录一次,不必为将作业指派到机群中的其它节点而重新登录。
这里我们采用《并行算法实践》中所介绍的第二种方法“构建用户管理脚本”来维护系统中用户信息的一致性,使用户不再重复输入密码即可登录到机群中的另一个节点上。
这包括以下步骤:1.以root用户登录到节点node0,修改文件/etc/hosts、/etc/host.equiv,在其中写入机群所有节点的名称和IP。
图 1图 2图 3图 42.修改系统的服务设置,通过服务设置工具启动如下系统服务:nfs、rexec、rsh、rlogin。
其中后面三个服务是与Remote Shell相关的,负责在远程节点启动进程。
图 5图 63.经过上述设置后需以普通用户身份测试RSH是否配置成功,运行命令如图7所示。
对于root用户需要经过图8所示的配置才可以不重新输入密码即可以通过RSH登录远程节点。
图7图84.通过图9所示的脚本即可以完成创建全局统一的用户信息。
该脚本首先在本节点新增用户,然后通过RSH将用户配置文件/etc/passwd复制到机群中所有其余的节点。
图9中建立了全局用户cluster。
图92.3 单一文件系统(Single File System)的构建NFS是一种Unix/Linux之间通过网络共享文件的标准方式。
使用NFS,就能够透明的安装和访问网络上远程主机的文件系统,将其安装(mount)在本地的文件系统中,类似于Windows下的映射驱动器。
在示例机群中,节点node0是服务器,把目录/home和/cluster 进行共享;节点node1到node63是客户端,把服务器的/home和cluster安装到自己的文件系统当中。
下面分别进行讨论:1.首先在节点node0上建立目录/cluster,然后将该目录授权给用户cluster。
图102.可以通过如图11所示的服务器设置工具配置共享目录,也可以通过图12-13所示的直接修改/etc/exports文件改变目录的共享。
图13表示将目录/home和/cluster以可读可写的方式共享给192.168.0.0/24范围(IP从192.168.0.1到192.168.0.254)内的所有机器。
图11图12图13 3.运行命令exportfs –a完成目录的共享。
图144.客户端节点同样需要首先建立/cluster目录,然后修改分区配置文件/etc/fstab,在其中加入对/home和/cluster的映射。
图15图165.运行命令mount –a完成目录的共享。
图176.通过图18中的脚本可以将该分区配置文件拷贝到机群中所有其他节点。
图182.4 并行编程环境(Parallel Programming Environment)的构建MPI(Message Passing Interface):消息传递接口MPI目前是最流行的分布存储并行编程环境。
MPICH是由美国的Argonne国家实验室开发的基于MPI标准的一套开放源码的软件包,目前最新的版本是1.2.4。
从链接/mpi/mpich/可以获得更多关于MPICH的资料以及下载该软件包。
其具体配置步骤如下:1.首先需要结压缩安装文件包并通过configure脚本完成初始配置。
其中-prefix指定/cluster/mpich为安装目录;--with-device指明所使用的通信系统类型为TCP/IP通信系统;--with-arch指明所使用的操作系统为Linux。
图19图202.完成初始配置之后即可以使用make、make install完成mpich的安装。
图21图223.修改mpich的节点配置文件/cluster/mpich/shar/machines.LINUX,指明该机群所包含的节点。
图23图244.在安装目录的example子目录下可以找到其所提供的示例源程序,通过编译运行cpi程序可以测试该MPI编程环境是否建立成功。
图252.5 单一作业管理系统(Single Job Management System)的构建PBS是由NAS(National Academy of Sciences)开发的面向批作业调度以及系统资源管理的软件包。
它主要用于管理使用UNIX或Linux的同构或异构的机群系统。
这里主要介绍OpenPBS的安装及简单使用。
1.首先需要解压缩安装文件包并通过configure脚本完成初始配置。
其中-prefix指定/pbs_home为安装目录;--set-server-home指定OpenPBS的spool目录,其用于存放各守护进程的配置文件、log文件以及任务调度的临时数据。
--set-default-server指定该机群系统的作业服务守护进程(Job Server)所处的节点为node0。
2.完成初始配置之后即可以使用make、make install完成OpenPBS的安装。
图27图283.通过修改服务器节点node0上的OpenPBS配置文件指明该并行运行环境中的节点名称。
图29图304.通过修改客户节点上的配置文件来指明日志文件的记录格式以及服务器节点的名称。
图31图325.完成基本配置后需要首先启动客户节点的OpenPBS守候进程。
图336.最后启动服务器节点上的三个守候进程。
其中对pbs_server的首次启动需要加上-tcreate参数。
启动完成后通过OpenPBS所提供的工具qmgr完成任务队列设置如图35所示。
图34图357.首先转换成预先建立的机群用户cluster并通过OpenPBS的基本命令完成作业的提交以及状态查询。
从图37可以看出,该作业以提交并分配在节点node1上执行;图38给出了这次执行输出文件的内容。
图36图37图388.图39、40测试了OpenPBS对并行作业的支持,包括作业提交以及状态的查询。
图39图403 结束语至此,通过以上步骤即完成了一个PC机群系统的构建。
该系统通过OpenPBS完成作业的管理,通过mpich完成并行作业的执行。