小型仿人机器人系统设计的方法
摘要:小型仿人机器人是近几年的研究热点,一个小小的仿人机器人中涉及了
多种学科领域例如电子工程、仿生学、信息工程、机械工程等,目前研制出与人
类相似度较高、功能相对完善的机器人一直是科学家的目标。本文主要探究仿人
机器人的设计原理以及设计方法,对一些程序进行详细分析,为以后的科技制造
提供参考意见。
关键词:小型;仿人机器人;系统设计;方法
小型仿人机器人凭借着与人类相似的外表、行为等一些外在特征以及经济化、人性化的
功能,更容易激起科技界的研究欲望,这种情况下,很容易推动我国科学技术与信息技术的
发展。
1.分析小型仿人机器人的设计理念
1.1分析仿人机器人的智能系统
从宏观方面来看,小型仿人机器人的智能系统必须拥有较高的运行速度,因为机器人在
启动的时候,视频采集系统、命令发送系统、显示系统、发音系统以及信息处理系统都得同
时运行,因此,对CPU内核的速率要求较高;小型仿人机器人做出的所有行为都是以采集的
视频信息为基础的,所以智能系统的研究重点是视频处理系统,综上所述,仿人机器人的智
能系统所具备的程序功能比较完善,需要的内存空间也比较大,因此,保障智能系统的运行
速度,能更好的推广仿人机器人的使用。
从微观方面来看,小型仿人机器人的智能系统必须具备音频、通信、摄像头、A/D、多路IO以及显示屏等设备[1]。
1.2分析智能系统的硬件设备
上文中分析了智能系统宏观方面的需求,对于控制器,常见的DSP以及单片机等系统是
不能满足其需求的,因此,可以在CPU处理器的基础上添加外围功能电路,这样既解决了运
行空间不足、运行速度较慢的缺陷,又实现了低成本的目的。
1.3分析组织层的硬件设备
本次研制的小型仿人机器人,其关节被设置成了19个自由节,在之后的使用过程中肯定会提高其关节自由度,进而更好的实现手臂功能、行走功能、俯身功能等一系列仿人运动。
综上所述,一个仿人机器人的关节自由度至少为19个。
此外,组织层还得确保小型仿人机器人运动过程中的稳定性,当组织层接收到运动信号时,
必须将信号输送给每一个关节,共同展开运动。
1.4A/D转换电路
在当前的设计过程中,由于CMOS数模转换器的高效性,可以将模拟信号同步输进八个
通道中,同时还能将信号转换成二进制模式。在这种情况下,很好的保障了小型仿人机器人
的运行效率。
2.分析控制系统的硬件
执行层硬件,其主要功能是发布信息、采集信息、控制小型仿人机器人运动、转换电源等,这也是控制系统的外围电路。发布信息时,控制系统会自动连接智能系统,借助发音器、显示器等一些机械设备,将信息输送给外界;采集信息时,智能系统中的摄像头、传感器、
电位计均是获取信息的来源;控制小型仿人机器人运动时,当每一个关节得到运动指令后,
会有控制系统协调完成,确保机器人活动过程中的稳定性;转换电源时,控制系统会将电源
输送给每一个部件,保障智能系统、组织层均能正常运行。
3.小型仿人机器人中控制系统的设计原理及组成
3.1控制系统中的软件功能框图
此次研制小型仿人机器人时,研究人员的设计理念为模块化程序设c1-思想,通过程序的
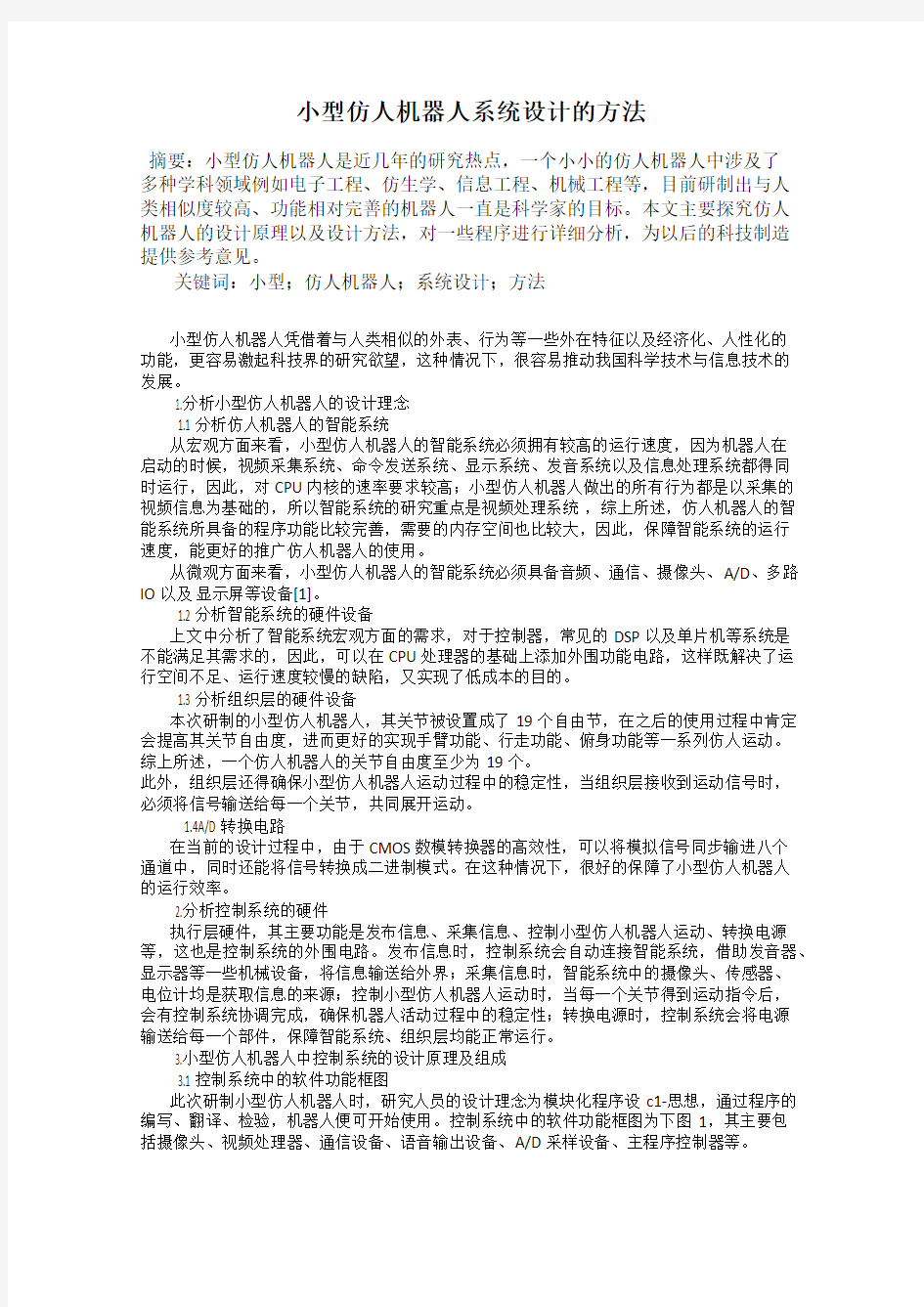
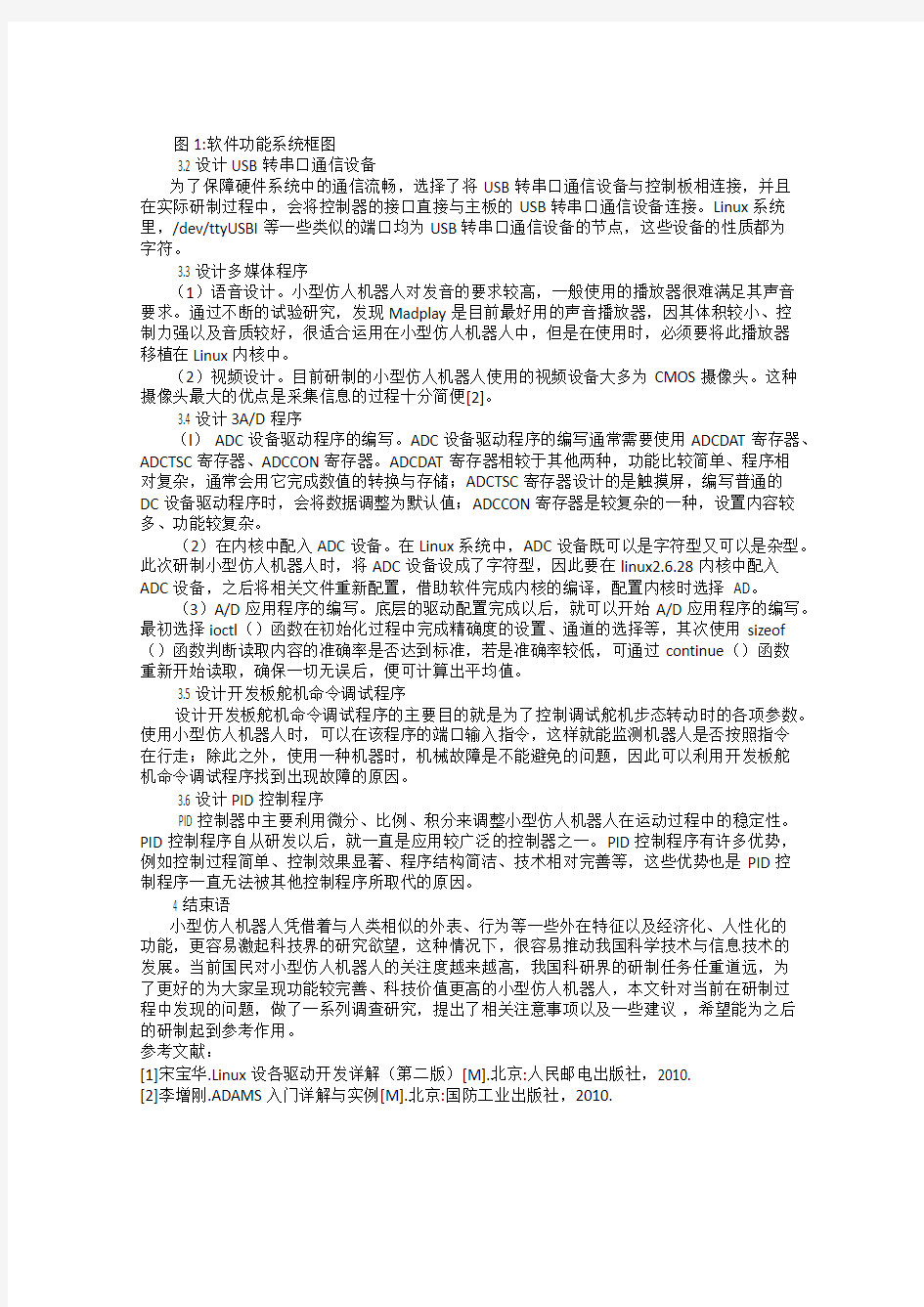
编写、翻译、检验,机器人便可开始使用。控制系统中的软件功能框图为下图1,其主要包
括摄像头、视频处理器、通信设备、语音输出设备、A/D采样设备、主程序控制器等。
工业机器人机械系统设计 机器人技术是利用计算机的记忆功能、编程功能来控制操作机自动完成工业生产中某一类指定任务的高新技术,是当今各国竞相发展的高技术内容之一。它是综合了当代机构运动学与动力学、精密机械设计发展起来的产物,是典型的机电一体化产品,工业机器人由操作机和控制器两大部分组成。操作机按计算机指令运动,可实现无人操作;控制器中计算机程序可依加工对象不同而从新设计,从而满足柔性生产的需要。 机器人应用领域广泛,包括建筑、医疗、采矿、核能、农牧渔业、航空航天、水下作业、救火、环境卫生、教育、娱乐、办公、家用、军用等方面,工业机器人在国内主要应用于危险、有毒、有害的工作环境以及产品质量要求高(超洁、同一性)的重复性作业场合,如焊接、喷涂上下料、插件、防爆等。 一、工业机器人的总体设计 1.主体结构设计 工业机器人主体结构设计的主要问题是选择由连杆件和运动副组成的坐标形式。工业机器人的坐标形式主要有直角坐标式、圆柱坐标式、球面坐标式、关节坐标式等。 直角坐标式机器人主要用于生产设备的上下料,也可用于高精度的装配和检测作业。 圆柱坐标式机器人主要有三个自由度:腰转,升降,手臂伸缩。手腕常采用两个自由度,绕手臂纵向轴转动与垂直的水平轴线转动。手腕若采用三个自由度,机器人总自由度达到六个。 球面坐标式机器人也叫极坐标式机器人,具有较大的工作范围,设计和控制系统比较复杂。 关节坐标式主体结构的三个自由度腰转关节、肩关节、肘关节全部是转动关节,手腕的三个自由度上的转动关节(俯仰、偏转和翻转)用来最后确定末端操
Cobra Series 桌面机器人 Reach:600mm/800mm Payload:5.5kg Repeatability:0.02mm Weight:34/35kg Desingn Life: 60 Million Cycles SmartModules 框架机器人 Mas Stroke:2000mm Min Stroke:130mm Number of Axis: 1 to 3 Max Payload:60kg Max speed:1200mm/sec Repeatability:0.01mm Design Life:5000km Cartesian Robots Size:600*450mm Payload:5.5kg Accuracy:0.025mm Weight:54kg Design Life:5000km 直角坐标机器人工作台: 2.传动方式 传动方式选择是指选择驱动源及传动装置与关节部件的连接形式和驱动形式,主要包括: 直接连接传动。驱动源或带有机械传动装置直接与关节相连。 远距离连接传动。驱动源通过远距离机械传动后与关节相连。 间接驱动。驱动源经一个速比远大于1的机械装置与关节相连。 直接传动。驱动源不经过中间环节或经过一个速比等于1的机械传动这样的 中间环节与关节相连。 3.模块化结构设计 模块化机器人是有一些标准化、系列化的模块件通过具有特殊功能的结合部用积木拼接的方式组成一个工业机器人系统。模块化设计是指基本模块设计和结合部设计。 模块化工业机器人主要的特点是:经济性、灵活性 4.材料的选择 与一般机械设备相比,机器人结构的动力特性是十分重要的,这是材料选择的出发点。材料选择的基本要求是:强度高、弹性模量大、重量轻、阻尼大、材料价格低。 5.平衡系统设计 工业机器人是一个多刚体耦合系统,系统的平衡性是极其重要的,在工业中采用平衡系统的理由是:安全、借助平衡系统能降低因机器人结构变化而导致重力引起关节驱动力矩变化的峰值、借助平衡系统能降低因机器人运动而导致惯性
目录 1前言 (1) 1.1仿人机器人的概念........................................................ 错误!未定义书签。 1.2课题来源 (1) 1.3技术要求 (1) 1.4国内外研究现状及发展状况[] 2........................................ 错误!未定义书签。 1.4.1 国内研究现状 (1) 1.4.2 国外研究现状 (2) 1.4.3 发展趋势 (3) 1.5本课题要解决的主要问题及解决方案 (4) 2 总体方案设计 (6) 2.1仿人机器人臂手部结构的确定 (6) 2.2仿人机器人上身尺寸的确定 (6) 2.3结构的设计 (6) 2.4仿人机器人自由度的确定 (6) 2.5电机的选择 (7) 3 机器人驱动装置的设计 (8) 3.1 肩部步进电机的选择 (9) 3.2 肘部步进电机的选择 (9) 3.3 腕部及头部电机选择 (10) 4.仿人机器人机械传动件的设计 (11) 4.1齿轮的设计 (11) 4.1.1 肩部齿轮的设计与校核 .............................................. 错误!未定义书签。 4.1.2 肘腕部齿轮设计 (13) 4.1.3 头部齿轮的设计 (14) 4.2轴的设计与计算 (15) 4.2.1 轴的结构设计........................................................... 错误!未定义书签。 4.2.2 轴的强度计算 (16) 5. 仿人型机器人连接板的设计及校核 (21) 5.1肩部连接板的设计与校核 (21) 5.2电机支撑板的设计与校核 (22) 6. 仿人型机器人三维造型及运动仿真 (23) 6.1仿人型机器人三维造型 (23) 6.2仿人型机器人运动仿真 (24) 6.3仿人型机器人舞蹈运动分析 (24) 6.4仿人机器人重力分析 (25) 7 结论 (26) 参考文献 (27) 致谢 (29) 附录 (30)
摘要 工业机器人技术是近年来新技术发展的重要领域之一,是以微电子技术为主导的多种新兴技术与机械技术交叉、融合而成的一种综合性的高新技术。这一技术在工业、农业、国防、医疗卫生、办公自动化及生活服务等众多领域有着越来越多的应用。工业机器人在提高产品质量、加快产品更新、提高生产效率、促进制造业的柔性化、增强企业和国家的竞争力等诸多方面有着举足轻重的地位。而机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一;是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分;是提高生产过程自动化、改善劳动条件、提高产品质量和生产效率的有效手段之一。尤其在高温、高压、粉尘、噪声以及带有放射性和污染的场合,应用得更为广泛。 本课题将设计一台四自由度的工业机器人,将会被用作自动送料装置。主要工作部件及设计重点就是机械手。第一,本人将设计该机器人的底座、大臂、小臂以及执行机构机械手爪的结构和模型;第二,再设计出适合于该机器人的驱动、传动方式,以期构成其的结构平台。最后,在此基础上再将其控制系统设计出来,由下面几个步骤组成:数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计。其中重点要加强控制软件的可靠性和机器人运行过程的安全性,最终要实现的目标包括:关节的伺服控制和制动问题、实时监测机器人的各个关节的运动情况、机器人的示教编程和在线修改程序、设置参考点和回参考点。 关键词:工业机器人;机械手;驱动;控制
Abstract Industrial robot technology is one of the important fields in the development of new technologies in recent years, is a cross, a variety of emerging technology and mechanical technology integration with microelectronics technology as the leading into a comprehensive high and new technology. This technology has been used more and more in the fields of industry, agriculture, national defense, medical, office automation and service life. Industrial robots play a decisive role in improving the quality of products, to speed up the update products, improve production efficiency, promote manufacturing flexibility, strengthen enterprise and national competitiveness etc. The manipulator is the traditional task execution mechanism of industrial robot system, is one of the key components of the robot; is a product of modern control theory and automation of industrial production practice, and to become an important part of modern mechanical manufacturing system; it is one of the effective ways to improve the production process automation, improve working conditions, to improve the product quality and production efficiency. Especially with a radioactive pollution in high temperature, high pressure, dust, noise and occasions, more widely applied. This topic will be the design of industrial robot with a four degree of freedom, will be used for the automatic feeding device. The main working parts and design focus is manipulator. First, the base, I will design the robot big arm, small arm and gripper actuator structure and model; second, redesign drive, drive mode suitable for the robot, in order to form the structure of platform. Finally, on the basis of the designed control system, consisting of the following steps: the design of data acquisition card and servo amplifier selection, feedback system and the feedback component selection, terminal board circuit design and control software. The key to strengthen the security of operation reliability and robot control software, to achieve the ultimate goals include: Joint servo control and brake problems, real-time monitoring the movement of each joint of robot, robot teaching programming and online modify the program, set the reference point and the reference point return. Key Words:Industrial robot; Manipulator; Drive; Control
浙江大学“海特杯”第十届大学生机械设计竞赛“四足机器人”设计方案书
“四足机器人”设计理论方案 自从人类发明机器人以来,各种各样的机器人日渐走入我们的生活。仿照生物的各种功能而发明的各种机器人越来越多。作为移动机器平台,步行机器人与轮式机器人相比较最大的优点就是步行机器人对行走路面的要求很低,它可以跨越障碍物,走过沙地、沼泽等特殊路面,用于工程探险勘测或军事侦察等人类无法完成的或危险的工作;也可开发成娱乐机器人玩具或家用服务机器人。四足机器人在整个步行机器中占有很大大比重,因此对仿生四足步行机器人的研究具有很重要的意义。 所以,我们在选择设计题目时,我们选择了“四足机器人”,作为我们这次比赛的参赛作品。 一.装置的原理方案构思和拟定: 随着社会的发展,现代的机器人趋于自动化、高效化、和人性化发展,具有高性能的机器人已经被人们运用在多种领域里。特别是它可以替代人类完成在一些危险领域里完成工作。 科技来源于生活,生活可以为科技注入强大的生命力,基于此,我们在构思机器人的时候想到了动物,在仔细观察了猫.狗等之后我们找到了制作我们机器人的灵感,为什么我们不可以学习小动物的走路呢,于是我们有了我们机器人行走原理的灵感。 为了使我们所设计的机器人在运动过程中体现出特种机器人的性能及其运动机构的全面性,我们在构思机器人的同时也为它设计了一些任务: 1. 自动寻找地上的目标物。 2. 用机械手拾起地上的目标物。 3.把目标物放入回收箱中。 4. 能爬斜坡。 图一 如图一中虚线所示的机器人的行走路线,机器人爬过斜坡后就开始搜寻目
标物体,当它发现目标出现在它的感应范围时,它将自动走向目标,同时由于相关的感应器帮助,它将自动走进障碍物中取出物体。 二.原理方案的实现和传动方案的设计: 机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。 图二 图三 机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。 任务的实现主要是利用单片机来控制机器人的四条腿以及几个传感器的共同工作,并通过它们的协调工作来完成的。如图一中所示,让机器人爬过了斜坡之后,就先进行扫描,如果发现有目标出现在它的视野之内,它就会寻着目标前进。如果没有发现目标,机器人会原地转弯并搜寻在它视野之外的目标。由于目
基于An droid 的智能聊天机器人的设计与实现 学院名称: 业: 级: 号: 名: 任课教师: 安卓智能聊天机器人开发(一) 这个聊天机器人有点像前段时间很火的一个安卓应用一一小黄鸡 应用的实现其实很简单,网上有许多关于智能机器人聊天的接口, 我们只需要去 调用对应的接口,遵守它的 API 开发规范,就可以获取到我们想要的信息 开发步骤: 首先我们需要到这个图灵机器人的官网去注册一个账号,他会给我们一个唯一 Key ,通过这个Key 和对应的API 开发规范,我们就可以进行开发了。 然后在这个(/cloud/access api.jsp )网址里可以找到相关的开发介绍 比如:请求方式,参数,返回参数,包括开发范例,一些返回的编码等信息 这里是官方提供的一个调用小案例(JAVA ),这里我也顺带贴一下 这里我使用的接口是 图灵机器人(/) 这个接口给我们返回的是 就 可以实现这个应用。 Json 字符串,我们只需要对它进行Json 字符串解析,
/** 调用图灵机器人平台接口 * 需要导入的包: commons-logging- httpclient- */ public static void main(String[] args) throws IOException { String INFO = URLEncoder.encode(" 北京今日天气 ", "utf-8"); String requesturl = "/api?key= Apikey&info="+INFO; HttpGet request = new HttpGet(requesturl); HttpResponse response = HttpClients.createDefault().execute(request); //200 即正确的返回码 if(response.getStatusLine().getStatusCode()==200){ String result = EntityUtils.toString(response.getEntity()); "返回结果: "+result); 第一篇讲下关于如何调用接口,从网上获取数据,包括解析 Json 字符串 第二篇会把这些获取的数据嵌入到安卓应用 首先,先写一个工具类, 这个工具类是用来获取用户输入的信息并返回服务器提 供的数据的 这里面用到了一个第三方提供的JAR 包,Gson 它是谷歌提供给我们用来使Json 数据序列化和反序列化的 关于Gson 的使用我之前写过一篇笔记,不熟悉的朋友可以看看: Gson 简要使 用笔记(/p/3987429.html ) 代码如下:具体看注释 Package ; import ; import ; import ; 注册激活返回的 好了, 接下来开始实战吧,这个应用我打算写成两篇文章
听讲座《仿人机器人的发展和最新技术》心得首先江山老师通过一段精彩视频让我们对机器人有了大概的了解;接着江山老师对ALDEBARAN Robotics公司进行了简单介绍并从自由度、传感器两个方面向大家介绍了针对实物做硬件的过程;随后江山老师详细讲解了电子架构和软件环境的相关知识并介绍了世界机器人大赛的相关情况;在讲座的最后,江山老师还现场向我们展示了真实的机器人。这场讲座让人印象十分深刻。 仿人机器人开始于20世纪60年代的双足步行机器人,迄今已成功研制出的各种能静态或动态步行的双足机器人样机及在双足机器人领域理论研究上的成果推动了仿人机器人的快速发展。加藤一郎于1973年,从工程角度研制出世界上第一台真正意义上的仿人形机器人WABOT-1。1980年出现WL-9DR(Dynam’s Refined)双足机器人,用步行运动分析及重复试验设计步态轨迹,用以控制机器人的步行运动。1986年,加藤实验室又成功研制了WL-12步行机器人,该机器人实现了步行周期2.6s、步幅30cm的平地动态步行。1996年11月公司首次展示了研制成功的第一台仿人机器人P2,它成为世界上第一台人性化自主双腿步行机器人。1997年10月HONDA公司又推出了仿人形机器人P3,是一台完全自立的人性化双腿步行机器人。在此基础上,ASIMO才得以诞生,2004年12月15日,日本本田技研工业株式会社推出了新一代“ASIMO”机器人,它是世界上首批遥控式双足直立行走机器人。 仿人机器人步态模式可分为静态步行、准动态步行和动态步行。在静态步行中,机器人的质心在地面上的投影始终不超越支撑多边形的范围;而在动态步行中,质心的投影在某一时刻可以超越支撑多边形。研究表明,动态行走时关节驱动力矩较静态行走时小,是仿人机器人研究的必然发展方向和实现目标。仿人机器人步态规划不仅取决于地面条件、下肢结构、控制的难易程度,而且必须满足运动平稳性、速度、机动性和功率等要求。为提高仿人机器人的智能化,仿人机器人中安装了大量的传感器,如力传感器、力矩传感器、陀螺仪、视觉传感器、接近觉传感器、声学传感器等多种传感器。而六维力/力矩传感器具有可以同时测量3自由度力和3自由度力矩的优越性,使得常被安装在机器人脚底用于测量地面反力。机器人的控制从某种程度上,可以说是基于传感器的控制。 仿人机器人是能够与人相互影响的最理想的机器人,它能够通过与环境的交互不断获得新知识,而且还能用它的设计者根本想象不到的方式去完成各种任务,它会自己适应非结构化的、动态的环境。开展仿人型机器人研究,不仅能够促进传感控制、人工智能等多学科发展,而且将大大提高我国机器人技术的系统集成能力和控制水平。通过提高机器人的智能化、机动性、可靠和安全性以及与人类环境的完美的融入性,使得仿人机器人融入人类的生活,和人类一起协同工作,从事一些人类无法从事的工作,以更大的灵活性给人类社会带来更多的价值。
智能聊天机器人(小黄鸭)软件开发 课程名:模糊系统 小组成员:曹杰何敢谢新明 任课教师:於世为
目录 目录 ............................................................................................. 错误!未定义书签。 一、小黄鸭的背景 (2) 二、小黄鸭的原理 (2) 2.1 训练 (2) 2.1.1分词方法 (2) 2.1.2词库设计 (3) 2.2 匹配 (4) 三、属于自己的小黄鸭制作(简要步骤+截图说明) (6) 3.1 代码编写 (6) 3.2构建运行环境 (6) 3.3申请获取官方API Key (6) 3.4生成项目 (6) 3.5修改源代码 (6) 3.6修改项目其他项 (6) 四、文档附件说明 (7) 五、小黄鸭代码(含小组接口设计) (12) 5.1 AboutBox1.cs文件 (12) 5.2Form1.cs文件 (13) 5.3Program.cs文件 (17) 5.4 Simjosn.cs文件 (22) 5.5 AssemblyInfo.cs文件 (23) 5.6 AboutBox1.Designer.cs文件 (23) 六、总结 (29) 、
一、小黄鸭的背景 小黄鸭是根据人人网上的小黄鸡为模板,而进行的一个开发,小黄鸭与小黄鸡应该来说是一样的,小黄鸭智能聊天机器人也是一样采用通过调用韩国智能聊天机器人Simsimi的数据库来,当然,前提是获取到了网络接口(这个应该很容易),进而实现计算机和软件之间的通信 二、小黄鸭的原理 AI聊天机器人小黄鸡的工作可以被分成两个部分:训练+匹配。(其实很多AI的东西都可以被这么划分,比如人脸识别,语音识别等等) 2.1 训练 Simsimi中的“教学”,就是训练的过程,目的在于构建或是丰富词库。 流程描述如下: S1:用户通过教学界面向系统提出一个话题与相应应答; S2:系统对该话题进行分词,判断该话题在系统知识库中应存放的位置; S3:在系统知识库中添加该话题及相应应答。 可以看到,这里涉及到两个问题:给出一个话题,系统是如何分词的?词库要如何设计才能又快又准地应答? 2.1.1分词方法 有人认为我教小黄鸭“埃菲尔铁塔上45度角仰望星空”回答是“呵呵”,那下次它再看到“埃菲尔铁塔上45度角仰望星空”整句话的时候才会有相应回答。但实际上,下次只要它看到“埃菲尔铁塔”就会“呵呵”了好嘛。 这是因为聊天机器人的存储并不以句子为单位(那样太费时费空间),而是以词。于是,分词,几乎成为聊天机器人的核心。 英文分词好说,人家用空格什么的就搞定了,但中文不一样,对于一句话,人们可以用自己的认识区分词语,而机器人要怎么做,就是中文分词算法的研究范畴了。
多年质保操作简单方便快捷—————————————————————————————————————————————社会的迅速发展推动工业的更新升级,随着工业生产生活的发展,在厂家机械设备方面也同样需要相对应进行。工业机器人有比较强的可控能力以及生产能力,能够加快产品的更新换代。接下来由安徽泰珂森智能装备科技有限公司为您简单介绍其集成系统设计,希望能给您带来一定程度上的帮助。 控制系统是整条生产线的指挥调度中心,调度和指挥各系统单元设备完成各自的工作,需具有以下功能: ①生产线运行控制功能。主要是协调、控制、保障整条锻造生产线、可靠运行,根据工艺要求把生产线分为几个区域。采用区域启动、分区控制方式来完成对整个生产线的控制。总线通过检测各单机设备的运行状态,在某一区域或某一设备故障时,指挥其它设备动作,根
多年质保操作简单方便快捷—————————————————————————————————————————————据不同的状态对各单机设备发出等待、重启、权限停车等不同指令; ②现场监控功能。提供生产场景在线仿真界面,图形化实时显示在线产品所处工序、产品信息、设备状态、故障情况提示、报警信息等; ③生产管理功能。对各种生产信息进行收集、传输、统计并执行生产管理指令的人机交互系统; ④数据处理功能。监控系统具有数据采集,显示和记录功能,对于数字量,监控系统可以直接显示状态;对于模拟量既可进行趋势显示,又可进行数字显示。同时,对于重要数据可以进行数据库存储,以便对生产数据进行分析处理。 安徽泰珂森智能装备科技有限公司集机械手、工业机器人系统集
多年质保操作简单方便快捷—————————————————————————————————————————————成研发、制造、销售、自动化控制工程承包于一体的综合性自动化技术企业。公司在自动化领域具备充足的技术研发能力和丰富的项目经验,为各行业工厂量身订做适合、先进的自动化控制系统和解决方案。 公司在机械加工及自动上下料、自动打磨抛光,包装物流及搬运,汽车零部件加工组装,无人化工厂解决方案等众多行业中拥有成熟的应用案例。致力于以工业机器人应用为核心,为客户提供完善的自动化解决方案和交钥匙工程,同时是德国库卡、日本发那科、日本川崎、国产埃夫特机器人授权代理商与系统集成商,在机器人技术应用上有着密切的合作,为用户提供强有力的技术支撑。
智能四足机器人结构设计 摘要 对于我们的未来生活,每个人有不同的构想,但大多数人都相信,在将来的社会,机器人将作为家庭的一员进入我们的生活,与我们每天朝夕相处。可现在普遍存在人们心中的疑问是:将来机器人将以何种身份进入我们的生活,是玩伴还是佣人,智能步行机器人的设计就是为了将来机器人能进入我们中国人的家庭生活,为我们的家庭生活带来欢乐。 本设计采用关节型结构,成功地设计了智能步行机器人的本体结构。本机器人具有前后行、平地侧行等基本行走功能。另外机器人头部还装有CD摄影机,胸腔内部可装备内置电源和智能设备。本设计参考了狗的结构组成,使得机器人结构尽量与狗的本体结构相似,尤其在长度配比方面。本设计的结构比较复杂,关节数目众多,为了力求优化设计,设计者兼顾了关键部件的互换性和结构紧凑的原则。所有的关节都用了2036型的直流伺服电机作为驱动源,充分利用伺服电机的特性。伺服电机的驱动都采用了谐波减速器机构,该减速方案减速比大、效率高,是比较理想的减速方案。 关键词:智能四足机器人;结构设计;谐波传动
Intelligent Four-Foot Robot Frame Design Abstract For our future life,everyone had different ideas,but most people believe that,in future society,the robot as a family into our lives,and we can now daily overnight with the common people's hearts Question is: what will be the future status of robot into our lives,playmates or servants,the design of intelligent walking robot is to the future robot can enter our Chinese people's family lives,for our happy family life. The design of a joint structure,the successful design of intelligent walking robot,the body structure. The robot has before and after the trip,the ground adjacent to the basic operating functions. Another robot is also equipped with CD camera head,chest internal equipment can be built-in power supply,and intelligent. The reference design of the structure of the robot,making the structure as the robot dog,the dog's body similar to the structure,particularly in the area ratio of length. The design of the structure is more complicated,the large number of joints,in an effort to optimize the design,designers take into account the interchangeability of key components of the compact structure and principles. All joints are composed of a 2036-type of DC servo motor as a driver and make full use of servo motor characteristics. Servo motor drives are used harmonic reducer,the slowdown in the programme reduction ratio,high efficiency,The ideal slowdown is a good programme. Keywords:intelligent four-foot robot ; structural design; harmonic drive
无论是大型跨境电商,还是跨境小电商卖家,始终一定需要预算的一项运营成本就是客服。以一家典型面向美国市场的跨境电商为例,通过自建站和流量渠道(如Google Adwords,Facebook,Snapchat)面向美国消费者直接进行网站推广与产品销售,一定需要纯正的英语人工客服来处理产品的售前、售中、售后各项事宜。随着业务量越来越大,客服量一定也会相应增长,以单纯业务代表人员密集型为运营方式的客服中心人工成本也就会迅速增加。而在“黑五”圣诞这样的特别季节,客服量会呈几何级数增长,单纯用纯人工客服团队并非科学的选择。 其实,无论跨境电商规模大小,商家都可以借助"人工智能"的"洪荒之力",实现人工智能机器人与客人对话。借助智能化的客服机器人服务,将普通的重复性客服请求交给AI 机器人来处理,而人工客服资源集中则可专注在最有价值的服务内容上(例如安抚投诉、促成定单、交叉销售等)。这种聊天机器人与真人业务代表人机协作的混合模式可以做到自然流畅,准确可靠,是未来跨境电商客服中心发展的重要方向之一。 Callnovo跨境电商呼叫中心的技术团队能为世界各国跨境电商部署人工智能客服的Chat Bot 聊天机器人Chat Bot 聊天机器人客服的部署有以下特点:-首先,就是我们将自然语言处理和以神经网络为基础的深度学习人工智能技术应
用在跨境电商客服领域。因为有了深度学习的技术,我们完全可以打破人工配置问答匹配的规则,可以让客服系统有更好的自主学习能力和语义理解能力,包括可以处理客人非常口语化的问法,无论客人使用英式英语还是美式英语,聊天器都能自如理解并正确应答。 -Chat Bot机器人可以在多渠道上进行24小时不打烊的客服工作:例如Facebook Messenger,Skype,Twitter,手机短信,官网Live Chat等。 -人机协作:我们可以安排客人的问题,默认先由机器人客服来解答80-90%问题。 解答不了的问题怎么办?用户可一键点击之后转到人工客服来解答。或者我们可以安排当人工客服下班、不在线或者人工排队时,由机器人客服自动接替。 -边服务,边销售:传统的电商企业侧重销售,未来的电商趋势是侧重于服务。机器人客服可以以服务为基础,边服务边销售。例如当客人与某品牌官网上的客服机器人打字互动时,机器人可根据客人所提供的交谈信息内容,基于后台大数据为客人就个人品味与喜好提供更个人化的建议,挑选并推送对应商品或某程度的定制化的商品。 -丰富的对话元素:文字、图片、视频、链接、支付接口,以及第三方的数据资源都可以接通呈现在聊天机器人的对话框中。令服务生动,简化操作提高效率,增强体验。
小型仿人机器人系统设计的方法 摘要:小型仿人机器人是近几年的研究热点,一个小小的仿人机器人中涉及了 多种学科领域例如电子工程、仿生学、信息工程、机械工程等,目前研制出与人 类相似度较高、功能相对完善的机器人一直是科学家的目标。本文主要探究仿人 机器人的设计原理以及设计方法,对一些程序进行详细分析,为以后的科技制造 提供参考意见。 关键词:小型;仿人机器人;系统设计;方法 小型仿人机器人凭借着与人类相似的外表、行为等一些外在特征以及经济化、人性化的 功能,更容易激起科技界的研究欲望,这种情况下,很容易推动我国科学技术与信息技术的 发展。 1.分析小型仿人机器人的设计理念 1.1分析仿人机器人的智能系统 从宏观方面来看,小型仿人机器人的智能系统必须拥有较高的运行速度,因为机器人在 启动的时候,视频采集系统、命令发送系统、显示系统、发音系统以及信息处理系统都得同 时运行,因此,对CPU内核的速率要求较高;小型仿人机器人做出的所有行为都是以采集的 视频信息为基础的,所以智能系统的研究重点是视频处理系统,综上所述,仿人机器人的智 能系统所具备的程序功能比较完善,需要的内存空间也比较大,因此,保障智能系统的运行 速度,能更好的推广仿人机器人的使用。 从微观方面来看,小型仿人机器人的智能系统必须具备音频、通信、摄像头、A/D、多路IO以及显示屏等设备[1]。 1.2分析智能系统的硬件设备 上文中分析了智能系统宏观方面的需求,对于控制器,常见的DSP以及单片机等系统是 不能满足其需求的,因此,可以在CPU处理器的基础上添加外围功能电路,这样既解决了运 行空间不足、运行速度较慢的缺陷,又实现了低成本的目的。 1.3分析组织层的硬件设备 本次研制的小型仿人机器人,其关节被设置成了19个自由节,在之后的使用过程中肯定会提高其关节自由度,进而更好的实现手臂功能、行走功能、俯身功能等一系列仿人运动。 综上所述,一个仿人机器人的关节自由度至少为19个。 此外,组织层还得确保小型仿人机器人运动过程中的稳定性,当组织层接收到运动信号时, 必须将信号输送给每一个关节,共同展开运动。 1.4A/D转换电路 在当前的设计过程中,由于CMOS数模转换器的高效性,可以将模拟信号同步输进八个 通道中,同时还能将信号转换成二进制模式。在这种情况下,很好的保障了小型仿人机器人 的运行效率。 2.分析控制系统的硬件 执行层硬件,其主要功能是发布信息、采集信息、控制小型仿人机器人运动、转换电源等,这也是控制系统的外围电路。发布信息时,控制系统会自动连接智能系统,借助发音器、显示器等一些机械设备,将信息输送给外界;采集信息时,智能系统中的摄像头、传感器、 电位计均是获取信息的来源;控制小型仿人机器人运动时,当每一个关节得到运动指令后, 会有控制系统协调完成,确保机器人活动过程中的稳定性;转换电源时,控制系统会将电源 输送给每一个部件,保障智能系统、组织层均能正常运行。 3.小型仿人机器人中控制系统的设计原理及组成 3.1控制系统中的软件功能框图 此次研制小型仿人机器人时,研究人员的设计理念为模块化程序设c1-思想,通过程序的 编写、翻译、检验,机器人便可开始使用。控制系统中的软件功能框图为下图1,其主要包 括摄像头、视频处理器、通信设备、语音输出设备、A/D采样设备、主程序控制器等。
仿人机器人 仿人形机器人是机器人以其外观等,在此基础上,人体的互动,让made-for-human工具或环境。在一般仿人机器人的头部有一个躯干,两臂和两条腿,虽然有些形式的仿人机器人可以模型只身体的一部份,例如,腰部以上。一些仿人机器人也许还有一个'面子',用“眼睛”和“口”。机器人是机器人,从美学的角度,就像一个人类建造的。 介绍 TOSY的TOPIO,仿人形机器人,可以打乒乓球。[1] 仿人形机器人是一个机器人,因为它可以适应它环境的改变或本身并继续达到它的目标。这是最主要的区别和其他种类的人形机器人。在此背景下,一些仿人形机器人的能力方面,其中可能包括: (如充电?自我维持自身) 自主学习(了解或?获得了新的能力,没有外界援助的基础上,调整战略环境和适应新环境,新情况) 避免有害的情况下人们0.9%,财产,本身 互动?安全人类和环境 像其他机械的机器人,人形参阅以下基本元件,工作太:感觉和计划和控制。因为他们尽量的模拟人类的结构和行为,他们是仿人机器人的自主系统,通常是复杂多其他种类的机器人。
这影响到所有的机器尺度复杂性(机械、空间、时间、功率密度、系统和计算复杂性),但这也较明显的在功率密度和系统复杂性鳞片。首先,目前多数的人形不够结实的话甚至跳,这一切发生的时候,因为功率/重量比,不如在人体内。动态平衡德克斯特能跳,但是差到目前为止。另一方面,有很好的算法人形建设几个方面,但它是非常困难的,合并所有成一个有效率的系统(该系统技术的计算复杂性高)。如今,这些是主要的困难,仿人机器人的发展要处理。 仿人机器人的设置是为了模仿一些相同的体力劳动和脑力劳动,人类经历日报。科学家和专家来自许多不同的领域,包括工程,认知科学,语言和语言学结合他们的努力创造一个机器人为类人是不可能的。他们的创造者的目标是:有一天机器人将能够彼此都清楚人类智力,原因和表现得像人类。如果机器人都有能力这样做,他们最终可能工作在凝聚力和人类创造出一个更有生产力及高质量的未来。另一个重要的好处是理解的发展,机器人的人体生物、心理过程,从看似简单的行为的概念走到意识和灵性。 目前有两种方法来创建一个机器人。第一个模型机器人像一套刚性连接,互联的关节。这种结构是一个类似,可以发现,在工业机器人。虽然这种方法用于大部分的仿人机器人的出现,一个新开展的研究工作,在一些使用在生物力学中获取的知识。在此一,仿人形机器人的底线是很相似的人类骨骼。 目的
—-可编辑修改,可打印—— 别找了你想要的都有! 精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务—— 全力满足教学需求,真实规划教学环节
最新全面教学资源,打造完美教学模式 深圳大学期末考试试卷 开/闭卷开卷A/B卷N/A 课程编号1303270001 1303270002 课程名称EDA技术与实践(2)学分2.0 命题人(签字) 审题人(签字) 2015 年10 月20 日 设计考试题目:完成一个集成电路或集成系统设计项目 基本要求:2-3位同学一组,完成一个完整的集成电路设计项目或是一个集成系统设计项目。 规格说明: 1.题目自定。 1)集成电路设计项目 i.若为IC设计项目需要完成IC设计的版图。 ii.若采用FPGA实现数字集成电路设计,需要进行下板测试。 2)集成系统设计项目,需使用FPGA开发板或嵌入式开发板,完成一个完整的集成 系统作品。 3)作品需要课堂现场演示,最后提交报告,每个小组单独一份报告,但需阐述各个 成员的工作。 2.评分标准:
2015年第二学期,建议作品内容: 完成一个行走机器人,基本要求 o2-8只脚 o能行走 o可以用单片机,嵌入式,FPGA方案 一、设计目的: 通过设计一个能够走动的机器人来增加对动手能力,和对硬件电路设计的能力,增强软件流程设计的能力和对设计流程实现电路功能的能力,在各个方面提升自己对电子设计的能力。 二、设计仪器和工具: 本设计是设计一个能走动的机器人,使用到的仪器和工具分别有:sg90舵机12个、四脚机器人支架一副、单片机最小系统一个、电容电阻若干、波动开关一个、超声遥控模块一对、杜邦线若干、充电宝一个。 三、设计原理: 本次设计的机器人是通过51单片机控制器来控制整个电路的。其中,舵机的控制是通过产生一个周期为20毫秒的高电平带宽在0.5到2.5ms之间的pwm信号来控制。12路Pwm信号由单片机的定时器来产生。51单片机产生12路pwm信号的原理是:以20毫秒为周期,把这20毫秒分割
Oracle智能聊天机器人及AI技术展望 黄冠辉Rayes Huang 高级资深架构师
我们身边的人工智能及机器学习Internet Services Medicine ?癌细胞的检测?糖尿病分级?药物发现 ?行人检测 ?车道跟踪 ?识别交通标志 ?人脸识别 ?视频监控 ?网络安全 ?视频字幕 ?内容检索 ?实时翻译 ?图像/视频分类 ?语音识别 ?自然语言处理 互联网服务医疗媒体娱乐安全无人驾驶
企业关注的领域 企业正在研究或投资应用AI / ML的领域 对重复的,基于规则的功能性任务实 现自动化 提高分析模型的速度、规模和粒度 理解和模拟人类对话,提供更好的人 机交互 90年代商业人工智能的最后浪潮 经常用于图像和语音识别 将计算机视觉等人工智能集成到机器 人中 Source: Deloitte State of Cognitive Survey, August 2017
Oracle AI 战略 模型学习数据AI 赋能的 应用 自适应人工智能应用CX ERP SCM HCM SaaS PaaS IaaS 聊天机器人 数据管理物联网人工智能平台GPU 高级分析应用开发管理云
Oracle AI 的技术堆栈 提供人工智能支持的关键要素 针对机器学习进行优化的高性能计算和存储基础架构数据管理基础设施需要大量数据、 数据清理和规范化以及数据丰富化Oracle 将AI 和ML 功能嵌入到自己的 业务和IT 服务中,使用相同和优化 的AI 技术堆栈先进机器学习模型、快速发展的综 合环境Algorithm Catalog Collaboration Cognitive Services API Machine Learning Frameworks Auto Model Selection Model Dev Tools Data Analysis Machine Learning Developme nt Environmen t Enterprise Data Lake 2nd Party Data 3rd Party Data Security Data Integration Data Enrichment Data Preparation Data API Data Managemen t for AI GPUs High Performance Network High Performance Object Store Low Cost Archive Storage Infrastructu re for AI Recommendations, Insights, and Actionable Events Embedded AI Business Apps -ERP , SCM, CX, HRM IT Operations –DB, Security and Management Others –Mobile with conversational AI Oracle Cloud Infrastructure ?X7 Compute –HPC Ready ?Latest Skylake processors ?NVMe SSDs ?50Gbe network GPU Cloud Big Data Cloud DB Cloud Oracle Analytics Cloud AI Platform Cloud *Advanced Analytics ORAAH Oracle Data Management Solutions CX, ERP , SCM, HCM Cloud Adaptive Intelligent Apps IoT Apps Cloud Mobile Cloud AI Chatbot Managemen t & Security Cloud Autonomous DWH Cloud *DaaS Solutions (3rd Party Data)* Coming Soon