前悬架力学计算、建模及仿
真分析
关键词:前悬架力学计算建模仿真分析
概述:
本课题内容共两项:
1.计算、分析或测量系列前独立悬架中前梁在静载条件下,其外力大小和方
向
2.针对汽车的前梁与独立悬架总成设计、开发中的实际问题,利用机械系统
自动动力学仿真软件,开发汽车前悬架系统设计模块,模拟汽车的实际工
况,建立力学分析模型,分析影响汽车前轮定位参数的结构因素为测量前
悬架设计提供理论依据,为汽车前悬架提供最佳的结构尺寸。
1 前悬架力学计算
1.1.前悬架受力分析
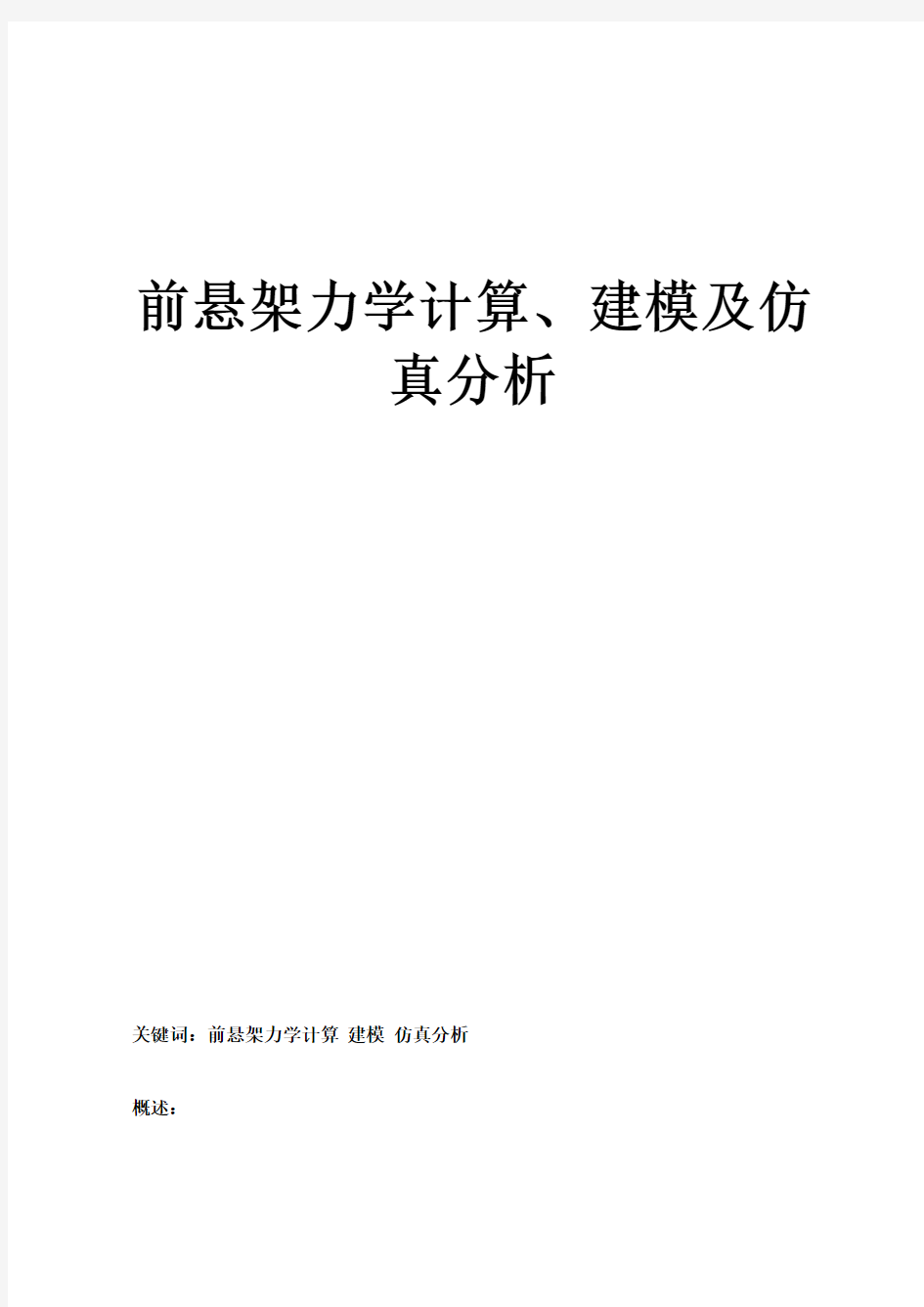
前悬架的结构为双横臂带扭杆弹簧,且扭杆弹簧上置。静载时分析悬架受力如下图1-1所示:
图1-1 悬架受力图
(1) 在轮胎中心线oo ’接地点o ’受垂直载荷Fz 和横向力Fy
(2) 上摆臂在球头A 处受横向和纵向力分别为F2y 和F2z(作用力方向假设为图示方向),在D 处受扭杆产生的扭矩m
(3) 下摆臂在球头B 处受力为F1(由于扭杆上置,下摆臂为二力杆,F1的方向与下摆臂两节点的连线共线)。
由静力平衡建立方程可得:
()12322**cos **y z F F h F a ωω-=- --------------------------(1-1)
211*cos y y F F F ω=- ----------------------- (1-2)
211*sin z z F F F ω=+ -------------------------- (1-3)
233233**cos **sin z y F F m ωω-= ------------------------- (1-4)
式中
2 ----------------------为主销长度,由图纸尺寸可得约为264mm
3 ----------------------为上摆臂长度,由图纸尺寸可得为270mm
2ω----------------------为主销内倾角,由图纸尺寸可得为6.5度
13,ωω--------------------为下、上摆臂角
a ----------------------为车轮接地点至上摆臂球头A 中心的水平距离 h2 ----------------------为上摆臂球头A 至地面高度
Fz ,Fy ------------------分别为单个车轮的垂直,横向载荷
22,z y F F ------------------分别为上摆臂球头
A 处的受力
F1 ----------------------为下摆臂在B 处的受力 M ----------------------为上摆臂在C 处受的扭矩
(1)由式1可求得下摆臂B 处所受的力F1; ()
()
210
232**012.25*100 4.66*cos 264*cos 12 6.5
y z F h F a F KN ωω--=
=
≈---
式中取 Fz=12.25KN (设整个前桥载荷为2.5吨,单轮载荷为1.25吨) Fy=0 (静载时没有横向力)
121222'43.74**sin a O E a a h tg ωω=++=++
00
43.74(31887)* 6.5264*sin 6.5100tg mm
=+-+≈
378
arctan
12369ω=≈
(取上摆臂能达到的最大角度,78mm 为轮胎上跳的最大距离,369mm 为上摆臂D 点
至轮胎接地点垂直中心线的距离)
(2)由式2、3 可求得上摆臂A 处所受的力F2y 和F2z;
2110
211*cos 4.66*cos 9.855 4.59*sin 12.25 4.66*sin 9.85511.45y y z z F F F K N F F F K N
ωω=-=-=-=+=-=
式中 取 Fy=0 ( 静载时没有横向力)
178arctan
9.855449
ω=≈
(取下摆臂能达到的最大角度, 78mm 为轮胎上跳的最大距离,449mm 为下摆臂C 点至轮胎接地点垂直中心线的距离)
(3)扭杆所受的扭矩为m =1854.9790 (N.m)
1.2. 前悬架各工况下受力计算
1.2.1基本载荷的受力分析
研究的前梁总成,确定前桥载荷24.5KN 为分析的基本载荷,单侧为12.25KN 。 (1)静载时:
F1=
-12.25*110)/{2*cos(0-7)}=-5.123 KN
静载时摆臂水平 (2)在上限位置时:
F1=(0-12.25*110)/{2*cos(17.378-7)}=-5.17 KN
轮胎上跳距离为84.5mm,上摆臂角度为arctg (84.5/270)=17.378,下摆臂角度为arctg (84.5/382.5)=12.457
(3)在下限位置时:
F1=(0-12.25*110)/{2*cos(-16.7-7)}=-5.55 KN
轮胎上跳距离为81mm,上摆臂角度为arctg (-81/270)=-16.7,下摆臂角度为arctg (-81/382.5)=-11.96
月牙板处受力如图:
图1-2 月牙板处受力图
静载时上摆臂衬套处受力分析(图1-3):
图1-3 上摆臂衬套处受力图
由式1-2、1-3可求得上摆臂A 处所受的力F2y 和F2z
211*cos y y F F F ω=--------------------------1-2 211*sin z z F F F ω=+--------------------------1-3
代入数值可得:
(1)在摆臂水平时:F1=-5.123 KN F2y=(-5.123*cos0)-0=-5.123 KN F2z=12.25+(-5.123)*sin0=12.25 KN
其合力为13.278
==
Fd KN
arctan(12.25/5.123)=67.3 方向为和水平线成67.3度.
(2)在上限位置时:F1=-5.17 KN,下摆臂角度为12.457
F2y=(-5.123*cos12.457)-0=-5 KN
F2z=12.25+(-5.123)*sin12.457=11.14 KN
其合力为Fd=12.21 KN
arctan(11.14/5)=.8 方向为和水平线成.8度.
(3)在下限位置时: F1==-5.55 KN, 下摆臂角度为-11.96
F2y=(-5.123*cos11.96)-0=-5 KN
F2z=12.25+(-5.123)*sin(-11.96)=13.31 KN
其合力为Fd=14.22 KN
arctan(13.31/5)=69.4 方向为和水平线成69.4度.
1.2.2 三种强化计算工况
第一种工况: 当路面作用到车轮的垂直力达到最大时----汽车驶上路面凸起障碍或落入洼坑,车轮与路面冲击时发生的载荷。
取动载系数2.5时,单轮最大垂直力为12.25*2.5=30.625KN
(1)静止时 F1=(0-30.625*110)/{2*cos(0-7)}=-12.8 KN
(2)上限时 F1=(0-30.625*110)/{2*cos(17.378-7)}=-12.9 KN
(3)下限时 F1=(0-30.625*110)/{2*cos(-16.7-7)}=-13.88 KN
第二种工况: 当车轮上的纵向力达到最大时----汽车加速或紧急制动时,由惯性力引起的纵向载荷.
车轮上的垂直作用力Z=m1*G1/2=1.4*24.5=34.3 KN
最大纵向载荷为m1*G1*q=1.4*24.5*0.8=27.44 KN
式中m1---前轴上的重量分配系数, 取 1.4
q-----地面附着系数,取 0.8
G1----静载时的前轴载荷
第三种工况: 当汽车转弯时的测向力最大时-----转弯侧滑产生的最大侧滑力。
假设汽车向右侧滑,左轮离开地面的极限情况
F1=(24.5*0.8*500-24.5*110)/{2*cos(-16.7-7)}=29.3 KN
2. 前悬架实体模型的建立和仿真模型基本参数的确定
2.1前悬架实体模型建立
根据分公司提供的前悬架各零部件的二维设计图纸,利用PRO/E软件建立了悬架
中个组成零件的三维实体模型,并根据总装配图进行装配。主要的零件模型如下:
图2-1 上摆臂图2-2 下摆臂
图2-3 转向节图2-4 扭杆
图2-5 上拉杆图2-6 下拉杆
根据前悬架的总装配图纸,在PRO/E中进行装配,并生成爆炸图如图2-7、2-8所示。
图2-7 悬架总装配图
图2-8 前悬架爆炸图
1-前梁焊接总成,2-扭杆弹簧,3-上摆臂,4-下摆臂,5-减震器总成,6-上拉杆带球接头总成,7-下拉杆带球接头总成,8-固定支架,9-上、下摆臂球接头总成,10-转向节,11-制动盘总成
2.2 ADAMS仿真模型基本参数的确定
应用多体系统动力学建立机械系统仿真模型参数需求量大,精度要求高,参数准备工作量大。根据研究工作的需要,将参数类型划分为运动学(几何定位)参数,质量参数(质量,质心与转动惯量),力学特性参数(刚度,阻尼特性)与外界参数(道路普,风力等等)。
2.2.1 运动学(几何定位)参数
应用多体系统动力学建立机械系统仿真模型时,需要依据悬架的结构形式,在模型中输入悬架中各运动部件之间的安装连接位置与相对角度,车轮定位角等参数。这些参数决定了悬架各部件的空间运动关系,如前轮上下跳动时的主销内倾角,后倾角,车轮外倾角,前束的变化等。有了运动学参数,就可以建立悬架的运动学模型并分析其运动特性。运动学参数,一般可以在汽车的设计图纸中查得。如前悬架总成图就包括了分析前悬架运动特性得几乎所有参数。应注意的是,各运动部件得相对连接位置,应在统一的整车参考坐标中测量。在无法获得悬架总成图时,可以在掌握一些基本参数,如运动部件的几何外形参数与车轮定位角等,通过作图法获得参数。由悬架总装配图查得的前悬架定位参数如表2-1所示。
表2-1前悬架定位参数
在ADAMS软件中建立仿真模型时各零件关键点的位置对建立模型的准确性非常关键。通过零件装配图和三维实体模型上实际测量,获得了前悬架中零件关键的位置。表2-2是前悬架关键点的位置(由于模型左右对称,表中只列出左侧点的位置)。表中X方向取汽车前进方向的相反方向为正,Y方向取汽车右侧为正,Z方向重力方向的相反方向为正。表中单位为mm。
表2-2 前悬架各零件关键点位置
2.2.2质量特性参数
在分析汽车悬架和整车动力学时,汽车整车与悬架的各零件质量,质心,转动惯量等参数决定汽车的性能.通常情况下,质量特性参数由各运动部件的质量,质心,转动惯量等参数组成.其中,质心和转动惯量与测量时的参考坐标有关,必要时应注明参考坐标.
悬架零件的质量,一般在设计图上查取.但应注意到零件与多体系统意义上的运动部件的差别.在多体系统动力学中,只要在运动过程中时刻具有相同运动轨迹,并具有特定的联系如通过各种方法固定在一起的零部件,就是一个运动部件.一个运动部件应只有一个共同的质心和转动惯量.运动部件的质心与转动惯量的参数查取,可以通过称重,计算,实验等方法获得.近年来,随着CAD技术的发展出现了确定运动部件质心,转动惯量的新方法,利用CAD实体造型软件,建立零部件的三维实体模型,之后输入材料密度等特性参数,获得质量,质心和转动惯量。
本次研究中各零件的质量特性参数是在PRO/E中,输入材料特性后,自动计算出来的,见表2-3。但最好的方法是将此值与实际零件的质量对比,再通过修改模型的壁厚等手段进行修正,直至与实际值吻合。另外需要特别注意的是零部件的惯量数据并不是相对于整车坐标系测的,而是相对于零部件自身的质心,即零部件的主惯性矩。
表2-3悬架零件质量参数表
(由于悬架左右部件对称,表中只列出悬架左边零件的质量参数;质心位置的坐标值是在每个零件自己独立的坐标系中测量出的,此坐标系和以后ADAMS 中建立部件的
坐标系相同。)
2.2.3力学特性参数
力学特性参数一般是指系统的刚度,阻尼等特性.由于汽车悬架中大量使用具有缓冲减震特性的零部件,如钢板弹簧,橡胶元件,弹性轮胎等,这些部件大都具有复杂的力学特性.而这些零部件的特性对汽车的各项性能,特别是操稳性和平顺性等具有决定的影响.
本次研究中与悬架有关零部件的阻尼(减震器)特性,橡胶元件(上下摆臂衬套)等动态特性参数主要是从厂提供的试验报告中获得,而扭杆弹簧的刚度和初始扭矩是根据公式计算获得的。
2.2.
3.1橡胶元件(上下摆臂衬套)参数的确定
由分公司提供的橡胶衬套的试验数据如图2-9,2-12所示。根据试验数据在ADAMS 中编制的弹性衬套特性曲线如图2-10、2-11、2-13、2-14所示。
图2-9 上摆臂衬套试验曲线
图2-10 上摆臂衬套线刚度特性曲线
图2-11 上摆臂衬套角刚度特性曲线
图2-12 下摆臂衬套试验曲线
图2-13 下摆臂衬套线刚度特性曲线
图2-14 下摆臂衬套角刚度特性曲线
2.2.
3.2减震器参数的确定
分公司提供的减震器的试验数据如表2-4所示。根据试验数据在ADAMS中编
制的减震器特性曲线如图2-15所示。
图2-15减震器特性曲线
(1)扭杆的刚度
单位扭转角所需要的扭矩称为扭杆弹簧刚度,扭杆的刚度仅与扭杆的直径和长度
有关,其值为
4
32M
d G K L
πθ
=
=
(Nmm/rad)=8.8
其中:d 为扭杆的直径,根据扭杆的设计图,扭杆的直径为34mm,
G 为剪切弹性模数, 一般取 427.7*10/N mm ,
L 为扭杆的长度,根据扭杆的设计图,扭杆的有效工作长度为1142mm,
(2)初始扭矩
为了消除扭杆弹簧在使用过程中因塑性变形对车身高度的影响,在安装时需要对扭杆施加预紧载荷,所以扭杆安装时存在预扭角,根据设计图查得汽车满载静载时扭杆的扭转角为61°,代入公式计算得扭杆的初始扭矩为9.42e+06(Nmm)。
2.2.4 外界参数
汽车的使用环境,是进行汽车动力学仿真的外界条件.这些外界条件众多,如汽车行驶道路的道路谱,高速行驶时的侧向风力等,都是影响汽车动力学的外界因素.外界参数的内容,主要有道路谱,风力等,再有些分析中,可以忽略.道路谱主要通过测量获得.而风力因数可以在分析计算的基础上结合实验获得。
3. 前悬架及转向系统多体模型的建立 3.1 ADAMS/Car 建模基本原理方法
应用ADAMS/CAR 对悬架系统进行建模原理相对比较简单,模型原理与实际的系统相一致。考虑到汽车基本上为一纵向对称系统,软件模块已预先对建模过程进行了处理,产品设计人员只需建立左边或右边的1/2悬架模型,另一半将会根据对称性自动生成,当然设计人员也可建立非对称的分析模型。ADAMS/CAR 属于模块化开发的产品,在ADAMS/CAR 模块中建立模型分为三个层次:Template, Subsystem, Assembly 。Template :主要是定义车辆子系统中的拓扑结构(部件和连接副的安装,数据如何传递等)。Subsystem :引用某具体Template 并根据提供实际的参数进行修改(定义部件的位置,弹簧刚度等)。Assembly :使一系列的Subsystem 和试验台连接起来,组
成一个进行仿真分析的完整模型,它可分为整车和悬架两种,在这里我们使用的是悬架Assembly 。下图是三个层次的结构示意图。
在建立分析总成的模型过程中,ADAMS/CAR 的建模顺序是自下而上的,首先应建
立模板(template)文件,然后利用模板文件生成悬架子系统(subsystem)以及转向子系统。最后进行装配得到的前悬架模型应与试验台(test rig)装配试验以检验悬架模型的正确性。属性文件是建立仿真分析模型的最基本的文件,它纪录和设置系统的基本参数和相关的属性,如轮胎的属性,悬架的基本参数等。
模板是整个模型中最基本的模块,然而模板又是整个建模过程中最重要的部分,分析总成的大部分建模工作都是在模板阶段完成的。在建立模板阶段,还要构造将各个子系统装配为一个总成所需要的“通讯器”(Communicator),最后应将模板文件和悬架测试装置装配在一起进行悬架测试检验。正确建立各个子系统间的连接关系是至关重要的,这些数据在以后的子系统和总成阶段无法修改,而零部件的位置和特征参数在后续过程中则是可以更改。
零部件之间的连接可以用铰链连接,也可用橡胶衬套(或弹簧)连接,二者的区别在于铰链连接是刚性的连接,不允许过约束的运动,它是在运动学(kinematic)分析
特性文件
特性文件
悬架 模板文件
转向器 模板文件
悬架 子系统
转向器 子系统
试验台
虚拟样机
● ● ●
● ● ●
图3-1 ADAMS/CAR 模块模型的三个层次
特性文件
时采用。橡胶衬套和弹簧属于柔性连接,它们在发生运动干涉的部件之间产生阻力,阻止进一步的干涉发生。它是在弹性运动学(compliance)分析时采用。两者之间可以通过静态铰接激励器(Actuators)转换分析模式。约定不考虑弹性衬套为多刚体模型,考虑弹性衬套为弹性运动学模型,
模板建立以后,接下来是创建子系统,在子系统的水平上,用户只能对以前创建的零部件进行部分数据的修改。建立仿真模型的最后一步是建立分析总成,在这一阶段,产品设计人员可根据实际需要,将不同的子系统组合成为完整的分析模型,如悬架总成可以包括悬架子系统、转向子系统和测试平台。
3.2 前悬架多体模型的建立
在此次研究分析中,前悬架采用的是双摆臂纵置扭簧式独立悬架,转向机构是齿轮-齿条式转向机,此悬架一般用于轿车或轻卡的前轴。扭杆与上摆臂通过花键连结,并与摆臂支承板前后片的两上孔中的弹性衬套过盈配合。这样在车轮上跳的过程中,上摆臂绕弹性衬套的轴线转动,并带动扭杆也绕该轴线转动而产生弹性力,从而为整个悬架提供了弹性元件。下摆臂与前梁焊接总成的两个下孔之间也用弹性衬套连结。为了使悬架在车辆制动时,铰接点处不产生过大的力,在上、下摆臂与车架纵梁之间还设有两根斜拉杆。另外,在上摆臂的上下都设有弹性橡胶限位块,以限制悬架运动的幅度,避免悬架与车架直接相碰。
应用多体系统动力学理论建立仿真模型时,在满足实际工程研究需要的前提下,对模型进行一些合理的简化是必要的。建立模型时作了以下假设:(1)采用双横臂独立悬架与齿轮-齿条式转向机,前左,前右非悬挂质量系统的结构相同,转向横拉杆与转
向机直接相连,可以认为左右悬架以汽车的纵向中轴线对称。(2)悬架的零部件中,除了弹性元件,橡胶元件外,剩余零部件全部认为是刚体,在仿真分析过程中不考虑其变形。(3)摆臂和拉杆通过螺丝固定在一起,悬架跳动过程中具有相同的运动轨迹,将其视为一个零件。(4)扭杆弹簧简化为圆柱副上施加相应的转矩来表示,(5)研究悬架特性时,车身相对与地面假设不动。
根据前悬架系统实际结构抽象出如图3-2所示的系统分析模型,整个悬架系统包括:上摆臂、转向节,下摆臂、减振器、扭杆、转向横拉杆、转向器齿条、车轮和车架(车身)等组成。
图3-2 前悬架拓扑结构
1车架(车身) 2 右减振器上半部分 2-1 右减振器下半部分 3 左减振器上半部
分 3-1 左减振器下半 4 右转向横拉杆 5 转向器齿条 6 左转向横拉杆 7
左上摆臂带上拉杆 8 右上摆臂带上拉杆 9 右转向节 10 左转向节 11 右
下摆臂带下拉杆 12 左下摆臂带下拉杆 13 前右车轮 14 前左车轮15 右扭
杆 16 左扭杆(其中零件2,2-1,3,3-1 为虚拟零件)
上图中左减振器上半部分(件3)、右减振器上半部分(件2)分别通过万向节铰链A, B与车架(件1)横梁相连接,它们相对车架可进行前后、左右两个方向的转动,而车架(车身)相对于整体坐标系静止,可认为与地面通过固定铰链固定。左减震器下半部分,右减震器下半部分分别通过万向节铰与左,右下摆臂相连接。左减振器下半部分、右减振器下半部分分别通过圆柱副C, D与左减振器上半部分、右减振器上半部分相连,它们相对左减振器上半部分、右减振器上半部分可进行轴向移动和转动。
左上摆臂(件7)一端、右上摆臂(件8)一端分别通过转动铰L,J与车架相连,使其可相对车架(车身)上下摆动,它们的另一端分别通过球铰M、K与左转向节、右转向节相连。左下摆臂(件12)一端、右下摆臂(件11)一端分别通过转动铰R,S与车架相连,使其可相对车架(车身)上下摆动,它们的另一端分别通过球铰Q、P与左转向节、右转向节相连。
左转向横拉杆(件6)、右转向横拉杆(件4)的一端分别通过球铰I、H与左转向节、右转向节相连,它们的另一端分别通过万向节铰链F、E与转向器齿条(件5)相连,约束了其绕自身轴线转动。转向器齿条通过滑移铰G与转向器壳相连,它可相对车架(车
身)左右移动。
前左车轮(件14)、前右车轮(件13)分别通过旋转副U、T与左转向节(件7) ,右转向节(件8)相连。
右扭杆(件15)的一端与右上摆臂(件8)在J处通过圆柱副相连接,扭杆的另一端与车身固定连接,同时在圆柱副上施加转矩,以实现右扭杆的作用。左扭杆(件16)的一端与左上摆臂(件7)在L处通过圆柱副相连接,扭杆的另一端与车身固定连接,同时在圆柱副上施加转矩,以实现左扭杆的作用。其中施加的转矩用函数公式表示为Left Function=-1.0*((torsion_ preload)-1.0*(torsion _stiffness)*AZ (cylindrical joint)),Right Function=-1.0*((torsion_ preload)+1.0*(torsion _stiffness)*AZ (cylindrical joint))。式中torsion_ preload 表示扭杆的预加扭矩,torsion _stiffness表示扭杆的刚度,AZ (cylindrical joint)表示圆柱副的转角,其值可由上一章的计算值代入。
由上面的分析得知,上摆臂的一端与车架用转动绞连接,同时又与扭杆用圆柱副连接,产生了过约束,所以将转动绞取消,只用圆柱副来约束上摆臂绕车架的转动。实际建立的模型中包含21个Moving Parts(包括虚拟部件,不包括地面),5 个Cylindrical Joints ,4 个Revolute Joints,6个 Spherical Joints,2 个 Convel Joints ,6 个 Fixed Joints ,4个 Hooke Joints,1 个 Inplane Primitive Joints,根据多刚体运动学理论中约束与自由度的对应关系,计算出前悬架系统的自由度:DOF=21*6-5*4-4*5-6*3-2*4-6*6-4*4-1*2=6
前悬架系统有6个自由度,分别表示左前轮,右前轮在垂直方向的上下跳动,左前,右前车轮绕各自车轴的转动,以及左右车轮绕各自主销轴线的转动。
前悬架系统实际结构中采用了橡胶减振元件,减震器与车身和下摆臂连接处的万向节铰链改为橡胶衬套弹性元件,上下摆臂和车身连接处的转动绞链改为橡胶衬套,上面的多刚体运动学模型变成弹性运动学模型。
根据前面得到的各零件关键点的位置建立悬架系统中相应的零件,然后定义各零件之间的约束关系,并输入相关参数如前束,外倾角等建立悬架子系统,同时建立通讯器,以便和其他子系统建立连接。悬架模型外形如图3-3。
汽车系统动力学的发展现状 仲鲁泉 2014020326 摘要:汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有汽车在垂直和横向两个方面的动力学内容。介绍车辆动力学建模的基础理论、轮胎力学及汽车空气动力学基础之外,重点介绍了受汽车发动机、传动系统、制动系统影响的驱动动力学和制动动力学,以及行驶动力学和操纵动力学内容。本文主要讲述的是通过对轮胎和悬架的系统动力学研究,来探究汽车系统动力学的发展现状。 关键词:轮胎;悬架;系统动力学;现状 0 前言 汽车系统动力学是讨论动态系统的数学模型和响应的学科。它是把汽车看做一个动态系统,对其进行研究,讨论数学模型和响应。是研究汽车的力与其汽车运动之间的相互关系,找出汽车的主要性能的内在联系,提出汽车设计参数选取的原则和依据。 车辆动力学是近代发展起来的一门新兴学科。有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。开始出现有关转向、稳定性、悬架方面的文章。同时,人们对轮胎侧向动力学的重要性也开始有所认识。在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。 在随后的20年中,车辆动力学的进展甚微。进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。随后的几十年,汽车制造商意识到行驶平顺性和操纵稳定性在汽车产品竞争中的重要作用,因而车辆动力学得以迅速发展。计算机及应用软件的开发,使建模的复杂程度不断提高。
主动悬架系统 主动悬架是用一个有自身能源的力发生器来代替被动悬架中的弹簧和减振器。根据作动器响应带宽的不同,主动悬架又分为宽带主动悬架和有限带宽主动悬架,也被叫做全主动悬 架和慢主动悬架。 全主动悬架系统所采用的作动器具有较宽的响应频带,以便对车轮的高频共振也加以控制。作动器多采用电液或液气伺服系统,控制带宽一般应至少覆盖0~15Hz,有的作动器响应带宽甚至高达100Hz。结构示意图见上图。从减少能量消耗的角度考虑,也可保留一个与作动器并联的传统弹簧,以用来支持车身静载。 主动悬架的一个重要特点就是,它要求作动器所产生的力能够很好地跟踪任何力控制信号。因此,它为控制律的选择提供了一个广泛的设计空间,即如何确定控制律以使系统能够让车辆达到最佳的总体性能。近二十年来,有大量关于主动悬架的研究论文及专题回顾文献发表。研究结果表明,主动悬架能够在不同路面情况及行驶条件下显著地提高车辆性能。 主动悬架的研制工作起始于八十年代。Lotus 制造了第一辆装有主动悬架的样车。其系统的响应可达30Hz,它可使乘坐舒适性和转弯及制动时的车身姿态控制提高约35%。还有一些主动悬架实施的例子,如Lotus Turbo Esprit、Damlar Benz的试验样机系统、BMW 和Ford等。然而,由于这些主动悬架系统具有的高成本、高能耗、增加的重量及复杂程度,使主动悬架仅限于样车及一些赛车等有限的应用上。 结构上,有限带宽主动悬架通常由作动器与一个普通弹簧串联后,再与一个被动阻尼器并联构成,见上图。这种系统在低频时(一般小于5或6赫兹)采用主动控制,而高于这个频率时,控制阀不再响应,系统特性相当于传统的被动悬架,而被动悬架在高频时的效果也 比较好。 由于有限带宽主动悬架作动器仅需在一窄带频率范围内工作,所以它降低了系统的成本及复杂程度,比全主动悬架便宜得多。尽管如此,它的主动控制仍然覆盖了主要的车身振动,包括纵向、俯仰、侧倾以及转向控制等要求的频率范围,改善了车身共振频率附近的行驶性能,提高了对车身姿态的控制,性能可达到与全主动系统很接近的程度。 就实用性及商业竞争力而言,有限带宽主动悬架的应用前景较好。专家普遍认为采用气液控制慢主动系统在商用领域最有发展前途,但若想在今后几年内有重大的发展,还得要求在电液阀技术方面有大的突破来降低成本。已有一些装有该类悬架的车辆投入市场,如Nissan Infiniti Q45和Toyato Celica等。两个有限带宽主动悬架系统实施方案见下图。
5.2 汽车悬架动力学 研究目的及意义 悬架是现代汽车最重要的总成之一,它把车轮和车身弹性地连接起来,传递它们之间一切力和力矩,并且缓和由不平路面传给车身的冲击载荷,以保证汽车的平顺性。现代汽车的高速行驶对悬架提出越来越高的要求,不仅具有减振性能,而且具备良好的导向特性,车轮定位参数随车轮跳动和外力而变化对汽车的操纵稳定性有十分重要的影响。此外悬架的合理设计需要对悬架各个构件以及铰接在各种工况下受力变形情况作出分析,以满足强度和刚度的需要。在本项目中由于采用了参考车辆的悬架参数,所以我们有必要对各个定位参数进行分析,选择合理的悬架参考位置坐标。
5.2.1A DAMS软件及其在悬架运动学/动力学中的应用 ADAMS软件的简单介绍 ADAMS (Automatic Dynamic Analysis of Mechanical System) 全称是机械系统自动动力学分析软件,它是目前世界范围内最广泛使用的多体系统仿真分析软件。通过预测和分析多体系统经受大位移运动时的性能,ADAMS可以帮助改进各种多体系统的设计,从简单的连杆机构到广泛使用的车辆系统。 ADAMS软件可以方便地建立参数化实体模型,并应用了多刚体系统动力学原理进行仿真计算。只要用户输入具体多刚体系统的模型参数,ADAMS软件就可以根据多刚体系统动力学原理,自动建立动力学方程,并用数值分析的方法求解这个动力学方程,这就给多体系统的计算带来了方便。而且ADAMS软件建模仿真的精度和可靠性在所有的动力学分析软件中是最好的。国外有人用ADAMS软件对Ford BroncoII进行整车操纵模拟的仿真分析。在车速为20m/s、0.4s内输入阶跃激励下,横摆角速度和侧向加速度曲线的数值仿真结果与实验结果具有很好的一致性。基于这些优点本课题将采用ADAMS仿真分析软件来对悬架运动学和弹性运动学,以及动力学进行初步的计算机仿真分析。ADAMS使用交互式图形环境和部件库、约束库、力库用堆积木方式建立三维机械系统参数化模型,并通过对其运动性能的仿真分析和比较来研究“模拟样机”可供选择的设计方案。ADAMS仿真可用于估计机械系统性能、运动范围、碰撞检测、峰值荷载以及计算有限元的载荷输入。它提供了多种可选模块,核心软件包括交互式图形环境ADAMS View (图形用户界面)和ADAMS Solver(仿真求解器),还有ADAMS FEA(有限元接口),ADAMS IGES(与CAD软件交换几何图形数据)等模块,尤其是它的ADAMS Vehicle(车辆和悬架模块)和ADAMS Tire(轮胎模块)使ADAMS软件在汽车行业中的应用更为广泛。 ADAMS软件在悬架动力学的应用 本课题拟用ADAMS View来对悬架进行建模。ADAMS View中有各种实体建立命令以及各种铰接型式,约束型式,可建立悬架的三维参数化模型。在进行运动
大摆锤是常见的游乐设施,通过整体结构分析,得到大摆锤的整体及各个部件的结构应力。然而大摆锤的很多工况是不能简化成静力学的,需有动力学解之。 模态分析是动力学分析的基础,大摆锤的悬臂按照一定周期摆动,需对大摆锤的整体结构进行模态分析,这样在产品设计之前可以预先避免可能引发的共振。 大摆锤的立柱是受压缩的细长杆件,当作用的载荷达到或超过一定限度时就会屈曲失稳,除了要考虑强度问题外,还要考虑屈曲的稳定性问题。 图(a)游乐场中大摆锤示意图图(b)大摆锤整体模型 图1 大摆锤示意图 对大摆锤整体结构强进行动力学评价与分析,分别计算大摆锤转盘在满载和偏载工况下,大摆锤悬臂摆动,对整个结构的影响;以及悬臂的摆角在120°、90°和45°时立柱的结构应力;大摆锤立柱的屈曲分析;悬臂驱动制动分析;整体结构的模态分析。为顺利安全的生产运行提供数据支持。 2 主要工作内容 (1)建立整体的动力学分析模型,计算满载和偏载工况下,立柱的受力情况;(2)计算大摆锤悬臂摆角在120°、90°和45°时立柱的结构应力强度;(3)悬臂驱动制动分析,以及驱动制动对立柱的影响; (4)大摆锤整体的模态分析; (5)大摆锤立柱的屈曲分析。 3 大摆锤的刚体动力学分析 3.1 材料参数 整体结构材料:Q235钢。材料力学参量为:材料密度为 =7.85 t/m3。
3.2 几何模型 使用通用结构分析软件ANSYS Workbench Environment(AWE)14.0多物理场协同CAE仿真软件,对大摆锤的整体进行建模,分别建立立柱、悬臂、大转盘建,并在软件中进行装配,如图3所示。 (a)大摆锤整体结构(b)转盘局部结构 (c)大摆锤悬臂(d)大摆锤立柱 图2 大摆锤整体装配模型 3.3载荷与约束 立柱的底板固定在地方面,因此在立柱底板与地面之间,施加固定(Fixed)约束,模拟底板与地面之间的紧固连接。 在重力作用下,悬臂绕转筒中心轴转动,在悬臂的横臂的内表面和立柱固定筒之间,施加旋转幅(Revolute),模拟悬臂绕横梁转动。 在悬臂摆动的过程中,大转盘同时绕着悬臂的中轴线转动,转动的角速度为1.07rad/s。悬臂与大转盘之间,施加旋转幅(Revolute),模拟大转盘绕悬
项目投资价值分析报告 第一部分概述 项目名称: 项目单位: 一、企业简介 1、目标企业的历史沿革,隶属关系,企业性质及制度;目前职工人数。 2、地理位置,占地面积;各交通运输条件(铁、公路、码头和航空港口等),运输方式。 3、年设计及实际生产能力,运营状况。 4、产品种类,主导产品名称及产量。 5、能源供应条件(水、电、汽、气、冷冻等)配套情况。 6、主要原、辅、燃料的供应量及距离,费用情况。 7、产品质量状况及产品在国内、外市场的定位与知名度。 8、产品出口量、主要国家和国外市场份额。 二、项目概要 三、简要分析结论 第二部分团队和管理 一、董事长、法人代表 二、原有股东情况 三、主要管理人员 四、主要技术负责人员
五、员工和管理 管理及人力资源评价指标 1、内部调控是否合理 2、管理组织体系是否健全 3、管理层是否稳定团结 4、管理层对市场拓展、技术开发的重视程度 5、有否科学的人才培训计划 6、各层面的执行情况 第三部分产品和技术 一、产品介绍 二、产品应用领域及性能特点 三、主要技术内容 四、技术先进性 五、产品技术指标 六、国内外技术发展状况 产品评价指标 1)产品是否具有独特性,难以替代 2)产品的开发周期 3)产品的市场潜力 4)产品的产业化情况 5)产品结构是否合理 6)产品的生产途径
技术评价指标 1)技术的专有性(技术来源) 2)技术的保密性(专利保护) 3)技术的领先性 技术开发 1)技术开发投入占总收入的比重 2)技术开发体系与机构 3)技术储备情况 第四部分市场及竞争分析 一、市场需求 二、目前的市场状况 产品市场分布 三、产品应用市场前景分析 四、产品市场需求预测 五、产品市场竞争力分析 (1)产品质量竞争力分析 (2)生产成本竞争力分析 (3)产品技术竞争力分析 六、主要竞争对手分析 (1)国内主要竞争对手分析,列出前20名。做出竞争对手一览表。 (2)国外竞争对手分析
汽车悬架系统动力学研究 Revised final draft November 26, 2020
(研究生课程论文) 汽车动力学论文题目:汽车悬架系统动力学研究 指导老师:乔维高 学院班级: 学生姓名: 学号: 2015年1月
汽车悬架系统动力学研究 摘要:汽车悬架类型的选择和悬架参数的差异对汽车的操纵稳定性和行驶平顺性具有重要的影响。主要分析了麦弗逊悬架的结构特点,并通过ADAMS软件建立麦弗逊悬架的3D模型,对其进行仿真分析,得出悬架参数的优化设计方法。关键词:麦弗逊悬架;ADAMS多刚体动力学;仿真分析Theautomobilesuspensionsystemdynam icsresearch CaisiVehicle141 Abstract:Differentkindsofsuspensionsystemsand ofdifferencesinsuspens ionparametersonthevehiclesteeringstabilityandridingcomforthaveimporta ntinfluence.MainlyanalyzedthestructurecharacteristicsofMacphersonsusp ension,andbyusingADAMSsoftwaretoestablish3DmodelofMacphersonsuspensio n,carryonthesimulationanalysis,themethodofoptimaldesignparametersofth esuspension. Keywords:Macphersonsuspension;ADAMS/Car;multi-rigid-bodydynamics;simulationandanalysis 引言 汽车悬架是汽车车轮与车身之间一切装置的总称。其功用在于:在垂直方向能够衰减振动和起悬挂作用;在侧向可防止车身侧倾和左右车轮载荷转移;在行驶方向上能够保证驱动与制动的实现并保持行驶方向的稳定性。不同的悬架设置会使驾驶者有不同的感受。看似简单的悬架系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。悬架系统起着传递车轮和车身之间的力和力矩、引导与控制汽车车轮与车身的相对运动、缓和路面传递给车身的冲击、衰减系统的振动等作用,汽车悬架系统对汽
1.SHPB实验装置、基本原理及用途 1.1实验装置及用途 如图1所示为SHPB的实验装置及数据采集处理系统: 图1 SHPB实验装置 SHPB装置主要由三部分组成:压杆系统、测量系统以及数据采集与处理系统。其中压杆系统是由撞击杆、入射杆、透射杆和吸收杆四部分组成。撞击杆也称之为子弹,一般来说压杆所采用的截面尺寸及材料均相同,因此子弹的长度就决定了入射应力脉冲的宽度λ,一般取λ=2L(L为子弹的长度),吸收杆主要是用来吸收来自透射杆的动能,以削弱二次波加载效应,为保证获得完整的入射及反射波形,入射杆的长度一般要大于子弹长度的两倍,所有压杆的直径应远小于入射应力脉冲的波长,以忽略杆中的惯性效应影响。 测量系统可以分为两个部分,一个是撞击杆速度的测量系统,另一个是压杆上传感器测量系统。对撞击杆速度的测量常采用激光测速法,如图1所示,在发射管与入射杆之间装有一个平行光源,用来发射与接收激光信号,两个光源之间的间距是可测的,当子弹经过平行光源时,会遮挡住光信号而产生一定宽度的脉冲信号,据此可测出子弹通过平行光源的时间即可求出子弹的撞击速度。压杆传感器测量系统则是在压杆相应位置处粘贴电阻应变片,并将应变片经电桥连接至超动态应变测试仪上,据此即可测出压杆中的应变。 数据采集和处理系统主要由TDS5054B数字示波器,CS—1D超动态电阻应变仪,TDS2000B波形存储器,以及微机等组成。其作用是完成对信号的采集、处理和显示。
1.2基本原理 利用应变片技术测量波速的工作原理如图2所示。子弹撞击压杆所产生的应力波(弹性波)先后为应变片1和应变片2所记录。鉴于弹性波在线弹性细长杆中的传播很少有衰减,也不弥散,基本上不失真,因此可根据两个应变片之间的距离及所记录信号的时间差确定波在细长杆中的传播速度。 应变片1应变片2 图 2 应力波波速测量原理图 鉴于弹性波在自由端反射的异号波形具有相同的传播速度,还可以采用如图3所示的更为简单的测试方法。这时,应变片所记录的是拉压相间的应力波,同一相位间隔距离代表应力波行走了一个来回,即杆长的二倍距离,据此也可以确定应力波在细长杆中的传播速度。 图3 应力波波速测量原理图 常规的拉伸(或压缩)实验测得的是材料在低应变率(341010/s -- )下的应力应变曲线。本实验测得的是材料在高应变率(241010/s )下的应力-应变曲线,其原理如图4所示。当枪膛内的子弹以某速度撞击输入杆时,在杆内产生一个入射脉冲i ε,试件在该应力作用下产生高速变形,与此同时,在压杆中分别产生往回的反射脉冲r ε和向前的透射脉冲t ε。
如何写好投资分析报告 导语:投资价值分析报告是国际投资商在进行投资决策时的重要依据,其要求在掌握项目基本投资额的基础上,下面是XX给大家整理的如何写好投资分析报告的相关内容,希望能给你带来帮助! 如何写好投资分析报告投资分析报告就是针对某一特定的、以谋取商业利益、竞争优势为目的的投资行为,就其产品方案、技术方案、管理及市场等,投入产出预期进行分析和选择的一个过程。 基本格式 摘要 主要包括:项目名称、承办单位、项目投资方案、投资分析、项目建设目标及意义、项目组织机构等。 项目背景分析及规划 主要包括:(1)项目背景;(2)项目建设规划;(3)主要产品和产量;(4)工艺技术方案。 外部环境分析 主要包括:(1)外部一般环境分析;(2)产业分析。 市场需求预测 主要包括:(1)国外市场需求预测;(2)国内市场需求分析。
内部分析 主要包括:(1)项目地理位置分析;(2)资源和技术分析;(3)项目SWOT分析;(4)项目竞争战略选择。 财务评价 主要包括:(1)评价方法的选择及依据;(2)项目投资估算;(3)产品成本及费用估算;(4)产品销售收入及税金估算;(5)利润及分配;(6)财务盈利能力分析;(7)项目盈亏平衡分析;(8)评价分析结论。 融资策略 主要包括:资金筹措、资金来源、资金运作计划等。 价值分析判断 主要包括:价值判断方法的选择、价值评估等。 退出机制 主要包括:如果投资失败,可转化成为什么其他用途,减少投资损失。 基本意义 投资价值分析报告是国际投资商在进行投资决策时的重要依据,其要求在掌握项目基本投资额的基础上,对项目背景、宏观环境、微观环境、相关产业、地理位置、资源和能力、SWOT、市场详细情况、销售策略、财务详细评价、项目价值估算等进行分析研究,更能反映项目各项经济指标,得出更科学、更客观的结论。
汽车悬架系统动力学研究 This manuscript was revised by the office on December 22, 2012
(研究生课程论文) 汽车动力学论文题目:汽车悬架系统动力学研究 指导老师:乔维高 学院班级: 学生姓名: 学号: 2015年 1月
汽车悬架系统动力学研究 摘要:汽车悬架类型的选择和悬架参数的差异对汽车的操纵稳定性和行驶平顺性具有重要的影响。主要分析了麦弗逊悬架的结构特点,并通过ADAMS软件建立麦弗逊悬架的3D模型,对其进行仿真分析,得出悬架参数的优化设计方法。 关键词:麦弗逊悬架;ADAMS多刚体动力学;仿真分析 The automobile suspension system dynamics research Caisi Vehicle141 Abstract: Different kinds of suspension systems and of differences in suspension parameters on the vehicle steering stability and riding comfort have important influence. Mainly analyzed the structure characteristics of Macpherson suspension, and by using ADAMS software to establish 3D model of Macpherson suspension, carry on the simulation analysis, the method of optimal design parameters of the suspension. Key words: Macpherson suspension; ADAMS /Car; multi-rigid-body dynamics;simulation and analysis 引言 汽车悬架是汽车车轮与车身之间一切装置的总称。其功用在于:在垂直方向能够衰减振动和起悬挂作用;在侧向可防止车身侧倾和左右车轮载荷转移;在行驶方向上能够保证驱动与制动的实现并保持行驶方向的稳定性。不同的悬架
《结构动力学》 读书报告
结构动力学读书报告 学习完本门课程和结合自身所学专业,我对本门课程内容的理解和在各方面的应用总结如下: 1. (1)结构动力学及其研究内容: 结构动力学是研究结构系统在动力荷载作用下的振动特性的一门科学技术,它是振动力学的理论和方法在一些复杂工程问题中的综合应用和发展,是以改善结构系统在动力环境中的安全和可靠性为目的的。本书的主要内容包括运动方程的建立、单自由度体系、多自由度体系、无限自由度体系的动力学问题、随机振动、结构抗震计算及结构动力学的前沿研究课题。 (2)主要理论分析 结构的质量是一连续的空间函数,因此结构的运动方程是一个含有空间坐标和时间的偏微分方程,只是对某些简单结构,这些方程才有可能直接求解。对于绝大多数实际结构,在工程分析中主要采用数值方法。作法是先把结构离散化成为一个具有有限自由度的数学模型,在确定载荷后,导出模型的运动方程,然后选用合适的方法求解。 (3)数学模型 将结构离散化的方法主要有以下三种:①集聚质量法:把结构的分布质量集聚于一系列离散的质点或块,而把结构本身看作是仅具有弹性性能的无质量系统。由于仅是这些质点或块才产生惯性力,故离散系统的运动方程只以这些质点的位移或块的位移和转动作为自由
度。对于大部分质量集中在若干离散点上的结构,这种方法特别有效。 ②广义位移法:假定结构在振动时的位形(偏离平衡位置的位移形态)可用一系列事先规定的容许位移函数fi (它们必须满足支承处的约束条件以及结构内部位移的连续性条件)之和来表示,例如,对于一维结构,它的位形u(x)可以近似地表为: @7710 二送 结构动力学 (1)式中的qj称为广义坐标,它表示相应位移函数的幅值。这样,离散系统的运动方程就以广义坐标作为自由度。对于质量分布比较均匀,形状规则且边界条件易于处理的结构,这种方法很有效。 ③有限元法:可以看作是分区的瑞利-里兹法,其要点是先把结构划 分成适当数量的区域(称为单元),然后对每一单元施行瑞利-里兹法。通常取单元边界上(有时也包括单元内部)若干个几何特征点(例如三角形的顶点、边中点等)处的广义位移qj作为广义坐标,并对每个广义坐标取相应的插值函数作为单元内部的位移函数(或称形状函数)。在这样的数学模型中,要求形状函数的组合在相邻单元的公共边界上满足位移连续条件。一般地说,有限元法是最灵活有效的离散化方法,它提供了既方便又可靠的理想化模型,并特别适合于用电子计算机进行分析,是目前最为流行的方法,已有不少专用的或通用的程序可供结构动力学分析之用。 (4)运动方程
第六章项目投资 本章是财务管理的一个重点章节,近几年每年分数均较高,因此要求考生要全面理解、掌握。 第一节项目投资概述 一、项目投资的含义与特点 项目投资是一种以特定项目为对象,直接与新建项目或更新改造项目有关的长期投资行 为。 特点:投资金额大;影响时间长;变现能力差;投资风险大。 二、项目计算期构成 项目计算期是指从投资建设开始到最终清理结束整个过程的全部时间。 项目计算期=建设期+生产经营期 n=s+p [例6-1]项目计算期的计算 某企业拟购建一项固定资产,预计使用寿命为10年。 要求:就以下各种不相关情况分别确定该项目的项目计算期。 (1)在建设起点投资并投产。 (2 )建设期为一年。 【答疑编号0610001 :针对该题提问】 解:(1 )项目计算期=0+10=10 (年) (2 )项目计算期=1 + 10=11 (年) 三、投资总额与原始总投资的关系 1. 原始总投资:(P201 )是反映项目所需现实资金水平的价值指标。它包括建设投资和 流动资金投资两项内容。其中建设投资包括固定资产投资、无形资产投资、开办费投资。 2. 投资总额:(P202 )是反映项目投资总体规模的价值指标,它等于原始总投资与建设 期资本化利息之和。 投资总额=原始总投资+建设期资本化利息 举例:假设企业购建一条生产线,需要1000万元资金。若资金全部来源于银行贷款, 借款年利率10%,预计建设期1年: 【答疑编号0610002 :针对该题提问】 则会计上:固定资产原值=1000+1000 X 10%=1100 (万元) 若资金的50%来源于银行贷款,借款年利率10%,预计建设期1年: 则会计上:固定资产原值=1000+1000 X 50% X 10%=1050 (万元) 流动资金投资(营运资金投资或垫支流动资金) 本年流动资金增加额(垫支数)=该年流动资金需用数-截止上年的流动资金投资额 经营期流动资金需用数=该年流动资产需用数-该年流动负债需用数 举例:假设企业购建一条生产线,设备价款1000万元,需要材料200万元,其中50% 的款项需要在
1.汽车系统动力学发展趋势 随着汽车工业的飞速发展,人们对汽车的舒适性、可靠性以及安全性也提出越来越高的要求,这些要求的实现都与汽车系统动力学相关。汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有车辆在垂向和横向两个方面的动力学内容,随着多体动力学的发展及计算机技术的发展,使汽车系统动力学成为汽车CAE技术的重要组成部分,并逐渐朝着与电子和液压控制、有限元分析技术集成的方向发展,主要有三个大的发展方向: (1)车辆主动控制 车辆控制系统的构成都将包括三大组成部分,即控制算法、传感器技术和执行机构的开发。而控制系统的关键,控制律则需要控制理论与车辆动力学的紧密结合。 (2)多体系统动力学 多体系统动力学的基本方法是,首先对一个由不同质量和几何尺寸组成的系统施加一些不同类型的连接元件,从而建立起一个具有合适自由度的模型;然后,软件包会自动产生相应的时域非线性方程,并在给定的系统输入下进行求解。汽车是一个非常庞大的非线性系统,其动力学的分析研究需要依靠多体动力学的辅助。 (3)“人—车—路”闭环系统和主观与客观的评价 采用人—车闭环系统是未来汽车系统动力学研究的趋势。作为驾驶者,人既起着控制器的作用,又是汽车系统品质的最终评价者。假如表达驾驶员驾驶特性的驾驶员模型问题得到解决后,“开环评价”与“闭环评价”的价值差别也许就
不存在了。因此,在人—车闭环系统中的驾驶员模型研究,也是今后汽车系统动力学研究的难题和挑战之一。除驾驶员模型的不确定因素外,就车辆本身的一些动力学问题也未必能完全通过建模来解决。目前,人们对车辆性能的客观测量和主观之间的复杂关系还缺乏了解,而车辆的最终用户是人。因此,对车辆系统动力学研究者而言,今后一个重要的研究领域可能会是对主观评价与客观评价关系的认识 2.目前汽车系统动力学的研究现状 汽车系统动力学研究内容范围很广,包括车辆纵向运动及其子系统的动力学响应,还有车辆垂向和横向动力学内容。及行驶动力学和操纵动力学。行驶动力学研究路面不平激励,悬架和轮胎垂向力引起的车身跳动和俯仰运动;操纵动力学研究车辆的操纵稳定性,主要是轮胎侧向力有关,引起的车辆侧滑、横摆、和侧倾运动。汽车系统动力学的研究可以分为三个阶段: 阶段一(20世纪30年代) ①对车辆动态性能的经验性的观察 ②开始注意到车轮摆振的问题 ③认识到车辆舒适性是车辆性能的一个重要方面 阶段二(30年代—50年代) ①了解了简单的轮胎力学,给出了轮胎侧偏角的定义 ②定义不足转向和过度转向 ③建立了简单的两自由度操纵动力学方程
目录 1引言1 2汽车悬架系统的类型和应用1 2.1被动悬架1 2.2主动悬架2 2.3半主动悬架2 3主动悬架控制系统国内外研究现状2 4汽车悬架的控制策略3 4.1天棚阻尼与开关阻尼控制3 4.2随机线性二次最优控制3 4.3模糊控制4 4.4神经网络控制4 4.5预测控制4 4.6滑模变结构控制5 4.7复合控制5 5控制方法的展望5 5.1注重控制策略的综合运用5 5.2注重汽车其他系统与主动悬架系统的联合控制研究5 5.3注重悬架系统模型的降阶研究6 6结论6 参考文献:6
汽车主动(半主动)悬架控制系统的 研究发展 1引言 汽车主动悬架目前是国内外研究的热点问题,研究的关键技术主要在控制策略的选择上及执行器的研发方面。国外由于成本问题,一些油气主动悬架也仅限用在一些高级轿车上,国内在此方面还处在研发及试验阶段,离主动悬架系统普遍使用在轿车上的时代还较远。 2汽车悬架系统的类型和应用 悬架是车架与车桥之间一切传力装置的总称,它的主要功用是传递作用在车轮和车架之间的力和力矩,缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的振动,以保证汽车能平顺行驶。衡量悬架性能好坏的主要指标是汽车行驶的平顺性; 即乘坐舒适性和操纵稳定性,但这两个方面是相互排斥的性能要求。由于被动悬架的刚度和阻尼系数是固定的,无法根据不同的使用要求自适应地改变,在结构设计上只能是满足平顺性和操纵稳定性之间矛盾的折衷。 为服这个缺陷,国外在五十年代提出了“主动悬架”的概念。主动悬架的特点是能根据外界输入或车辆本身状态的变化进行动态自适应调节。主动悬架包控制单元和力发生器,力发生器的作用下使悬架的特性得到控制,如同改变了悬架的刚度和阻尼系数,其中最关键的是控制算法的优劣。 2.1被动悬架 被动悬架, 由弹性元件和不可变参数的减振器组成, 只能在特定工况下达到最优, 缺少对变载荷、变车速、不可预测路况的适应性。被动悬架是传统的机械结构,由弹簧、减震器和导向机构组成。被动悬架的刚度和阻尼系数均不可调,只能在特定的工况下达到最优减振效果,存在明显的共振峰,难以同时获得良好的乘坐舒适性和操纵稳定性,缺乏灵活性。但被动悬架因结构简单、设计容易和制造方便,且无须额外的能量输入,目前在中低档轿车上应用最为广泛[1]。为了进一步改善被动悬架的减振效果,满足现代汽车对悬架提出的更高的性能要求,在桑塔纳、夏利和赛欧等轿车上加强了通过优化寻找最优悬架参数和对悬架导向机构的研究,采用了带有横向稳定杆的多连杆机构悬架系统,在一定程度上改善了被动悬架减振效果。
(研究生课程论文) 汽车动力学 论文题目:汽车悬架系统动力学研究指导老师:乔维高 学院班级: 学生姓名: 学号: 2015年1月
汽车悬架系统动力学研究 摘要:汽车悬架类型的选择和悬架参数的差异对汽车的操纵稳定性和行驶平顺性具有重要的影响。主要分析了麦弗逊悬架的结构特点,并通过ADAMS软件建立麦弗逊悬架的3D模型,对其进行仿真分析,得出悬架参数的优化设计方法。关键词:麦弗逊悬架;ADAMS多刚体动力学;仿真分析 The automobile suspension system dynamics research Caisi Vehicle 141 1049721402344 Abstract:Different kinds of suspension systems and of differences in suspension parameters on the vehicle steering stability and riding comfort have important influence. Mainly analyzed the structure characteristics of Macpherson suspension, and by using ADAMS software to establish 3D model of Macpherson suspension, carry on the simulation analysis, the method of optimal design parameters of the suspension. Key words:Macpherson suspension; ADAMS /Car; multi-rigid-body dynamics; simulation and analysis 引言 汽车悬架是汽车车轮与车身之间一切装置的总称。其功用在于:在垂直方向能够衰减振动和起悬挂作用;在侧向可防止车身侧倾和左右车轮载荷转移;在行驶方向上能够保证驱动与制动的实现并保持行驶方向的稳定性。不同的悬架设置会使驾驶者有不同的感受。看似简单的悬架系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。悬架系统起着传递车轮和车身之间的力和力矩、引导与控制汽车车轮与车身的相对运动、缓和路面传递给车身的冲击、衰减系统的振动等作用,汽车悬架系统对汽车的操
研究生课程论文答题本 科目:汽车动力学 授课教师:乔维高 年级专业: 学生姓名: 学生学号: 是否进修生?是□否■
基于SIMULINK悬架系统动力学仿真分析 (武汉理工大学汽车工程学院) 摘要:汽车行驶平顺性的优劣直接影响到乘员的乘坐舒适性,并影响车辆动力性和经济性的发挥,是 车辆在市场竞争中争夺优势的一项重要性能指标。因而如何最大限度地降低汽车在行驶过程中所产生的 振动,成为汽车行业的研究重点。本文以某轿车为例,对其进行力学分析,建立四自由度半振动微分方程,以不同等级路面和不同车速下的随机路面激励谱作为输入,利用Matlab/Simulink 仿真软件建立了 动态模型,进行计算机仿真,并分析了动力学参数的改变对汽车行驶平顺性影响。 关键词:悬架系统;平顺性;仿真 Suspension System dynamic simulation analysis Based on SIMULINK Abstract: Car Ride will directly affect occupant comfort and affect vehicle dynamics and economy of the play, is a vehicle to compete for advantage in the market competition is an important performance indicators. So how to minimize vibration during driving cars produced, became the focus of the automotive industry research. Taking a car, for example, its mechanics analysis, four and a half degrees of freedom vibration differential equations, random road pavement and different levels of excitation spectra under different speed as the input, using Matlab/Simulink simulation software to establish a dynamic model for computer simulation and analysis of the changing dynamics of the parameters affecting the car ride comfort. Key words: Suspension System;riding comfort; dynamic simulation 1 汽车动力学振动模型的建立 四自由度半车模型既能表征车身的质心加速度和速度的变化,又能表征车身绕其质心轴的俯仰角加速度和角速度的变化,结构也不太复杂,因此其仿真结果具有一定的代表性。四自由度半车模型的建立,必须作如下假设:整个系统为线性系统;前轴与前轮质量之和为前簧下质量;后轴与后轮质量之和为后簧下质量;非悬挂分布质量由集中质量块m1 f、m1r代替,车轮的力学特性简化为一个无质量的弹簧,不计阻尼;汽车对称于其纵轴线,且左、右车辙的不平度函数相等。车身振动的四自由度模型如图1所示。车身质量根据动力学等效的原则分为前轴上后轴上及质心上的三个集中质量m2 f、m2r 、m2c,三个质量由无质量的刚性杆连接。 图1 四自由度汽车模型
投资分析报告怎么写 投资分析报告怎么写 时间:2016/9/26栏目:工作汇报 投资分析报告怎么写 主要包括:项目名称,承办单位,项目投资方案,投资分析,项目建设目标及意义,项目组织机构。 一、项目背景分析及规划 主要包括:1、项目背景。 2、项目建设规划。 3、主要产品和产量。 4、工艺技术方案 二、外部环境分析 、外部一般环境(PEST)分析。 2、产业分析。主要包括:1 三、市场需求预测 主要包括:1、国外市场需求预测。 2、国内市场需求状况分析。 四、内部分析 主要包括:1、项目地理位置分析。 2、资源和技术。3、项目之 SWOT 分析。 4、项目竞争战略的选择。 五、财务评价 主要包括:1、评价方法的选择及依据。2、项目投资估算。 3、产品成本及费用估算。 4、产品销售收入及税金估算。 5、利润及分配。 6、财务盈利能力分析。 7、项目盈亏平衡分析。 8、财务评价分析结论。 六、融资策略 主要包括:资金筹措、资金来源、资金运筹计划等。 七、价值分析判断
主要包括:价值判断方法的选择,价值评估。 项目投资价值分析报告的概念 在国际投资领域中,为减少投资人的投资失误和风险,每一次投资活动都必须建立一套科学的,适应自己的投资活动特征的理论和方法。投资价值分析报告正是吸收了国际上投资项目分析评价的理论和方法,利用丰富的资料和数据,定性和定量相结合,对投资项目的价值进行全面的分析评价。 项目投资价值分析报告是投资前期一个重要的关键步骤,项目的规模大小、区域分析、项目的经营管理、市场分析、经济性分析、利润预测、财务评价等重大问题,都要在投资价值分析报告中体现。 项目投资价值分析报告的作用 项目投资价值分析报告在项目可行性研究的基础上,吸收国内外投资项目分析评价的理论和方法,利用丰富的资料和数据,定性和定量相结合,对投资项目的价值进行全面的分析评估。进行投资价值分析评估的目的是通过对投资项目的技术、产品、市场、财务、管理团队和环境等方面的分析和评价,并通过分析计算投资项目在项目计算期产生的预期现金流确定其有无投资价值以及相关的风险有多大,并进而做出投资决策,对投资者而言,项目投资价值分析报告是一个投资决策辅助工具,它为投资者提供了一个全面、系统、客观的全要素评价体系和综合分析平台。利用项目投资价值分析评估报告,投资者能全方位、多视角地剖析和挖掘风险企业的投资价值,最大限度地降低投资风险。对企业或项目法人而言,利用项目投资价值分析报告可以对项目的投融资方案以及未来收益等进行自我诊断和预知,以适应资本市场的投资要求,进而达到在资本市场上融资的目的。 一份好的项目投资价值分析报告将会使投资者更快、更好地了解投资项目,使投资者对项目有信心,有热情,动员促成投资者参与该项目,最终达到为项目筹集资金的作用。
汽车系统动力学的发展和现状 摘要:近年来,随着汽车工业的飞速发展,人们对汽车的舒适性、可靠性以及安全性也提出越来越高的要求,这些要求的实现都与汽车系统动力学相关。汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有车辆在垂向和横向两个方面的动力学内容。本文通过对汽车系统动力学的的介绍,对这一新兴学科的发展和现状做一阐述。 关键字:汽车系统动力学动力学响应发展历史 Summary:In recent years, with the rapid development of automobile industry, people on the vehicle comfort, reliability and safety are also put forward higher requirements, to achieve these requirements are related to vehicle system dynamics.Vehicle system dynamics is the study of all related to the movement of the car system discipline, it involves the scope is broad, in addition to the effects of dynamic response of vehicle longitudinal motion and its subsystems, and vehicles to and dynamic content crosswise two aspects in the vertical.Based on the vehicle system dynamics is introduced, the development and status of this emerging discipline to do elaborate. Keywords:Dynamics of vehicle system dynamics Dynamic response Development history 0 引言 车辆动力学是近代发展起来的一门新兴学科。有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。开始出现有关转向、稳定性、悬架方面的文章。同时,人们对轮胎侧向动力学的重要性也开始有所认识。 在随后的20年中,车辆动力学的进展甚微。进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。随后的几十年,汽车制造商意识到行驶平顺性和操纵稳定性在汽车产品竞争中的重要作用,因而车辆动力学得以迅速发展。计算机及应用软件的开发,使建模的复杂程度不断提高。在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。 传统的车辆动力学研究都是针对被动元件的设计而言,而采用主动控制来改变车辆动态性能的理念,则为车辆动力学开辟了一个崭新的研究领域。在车辆系统动力学研究中,采用“人—车—路”大闭环的概念应该是未来的发展趋势。作为驾驶者,人既起着控