GPS测量的作业模式
1.经典静态定位模式
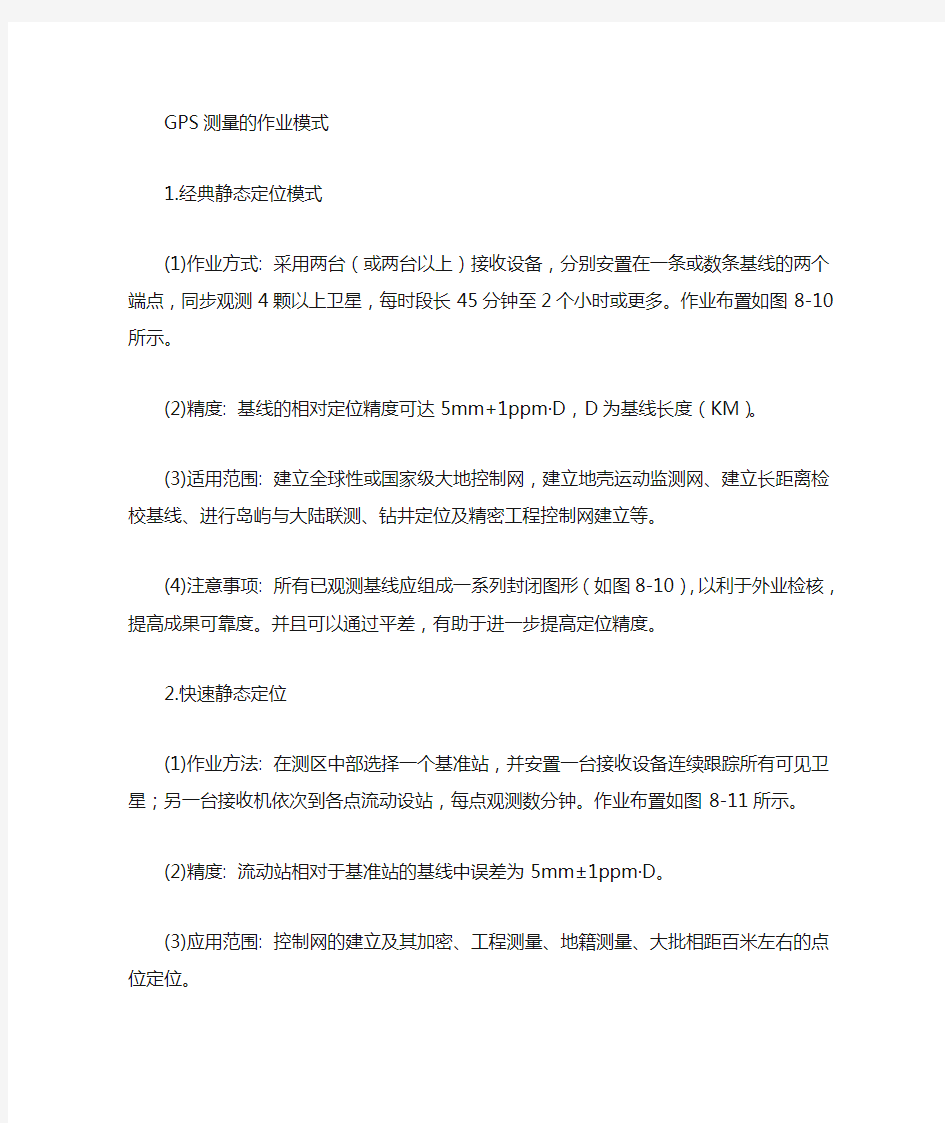
(1)作业方式: 采用两台(或两台以上)接收设备,分别安置在一条或数条基线的两个端点,同步观测4颗以上卫星,每时段长45分钟至2个小时或更多。作业布置如图8-10所示。
(2)精度: 基线的相对定位精度可达5mm+1ppm·D,D为基线长度(KM)。
(3)适用范围: 建立全球性或国家级大地控制网,建立地壳运动监测网、建立长距离检校基线、进行岛屿与大陆联测、钻井定位及精密工程控制网建立等。
(4)注意事项: 所有已观测基线应组成一系列封闭图形(如图8-10),以利于外业检核,提高成果可靠度。并且可以通过平差,有助于进一步提高定位精度。
2.快速静态定位
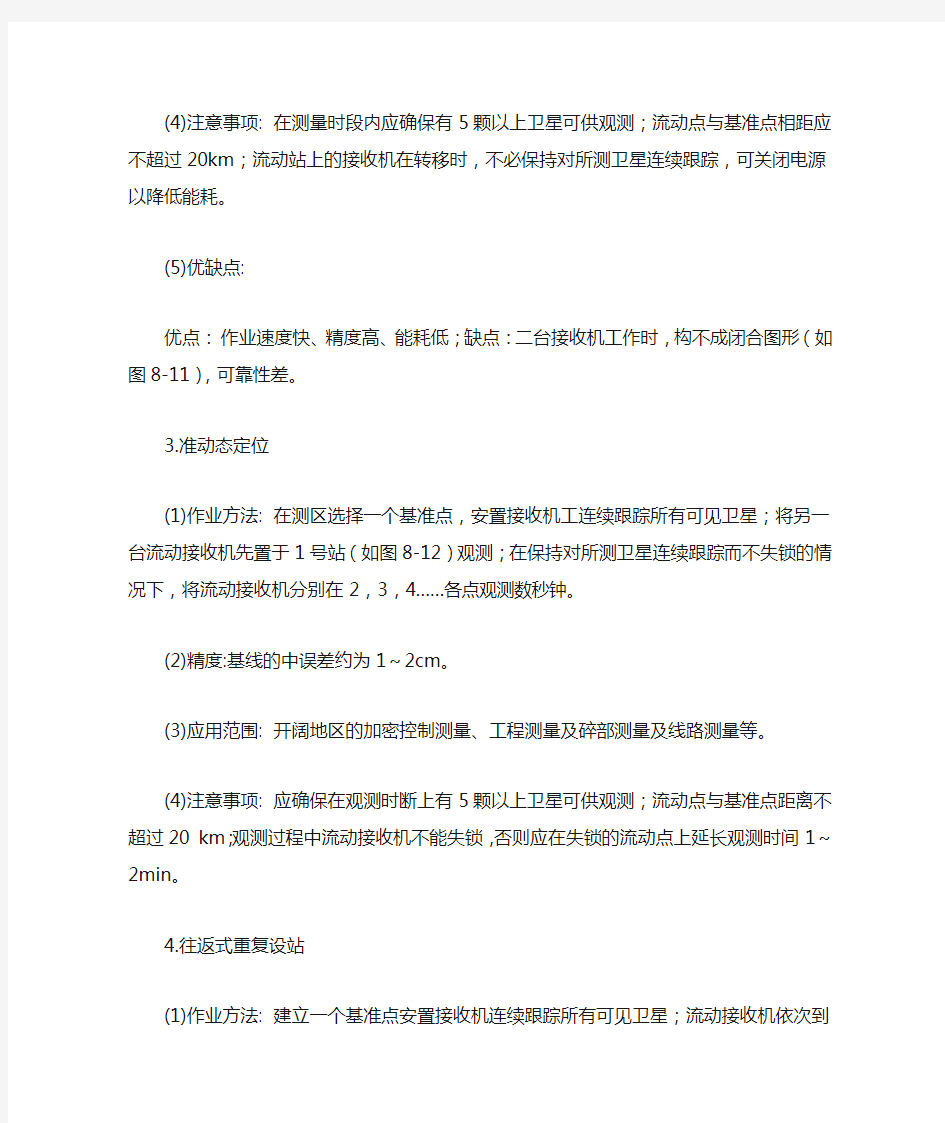
(1)作业方法: 在测区中部选择一个基准站,并安置一台接收设备连续跟踪所有可见卫星;另一台接收机依次到各点流动设站,每点观测数分钟。作业布置如图8-11所示。
(2)精度: 流动站相对于基准站的基线中误差为5mm±1ppm·D。
(3)应用范围: 控制网的建立及其加密、工程测量、地籍测量、大批相距百米左右的点位定位。
(4)注意事项: 在测量时段内应确保有5颗以上卫星可供观测;流动点与基准点相距应不超过20km;流动站上的接收机在转移时,不必保持对所测卫星连续跟踪,可关闭电源以降低能耗。
(5)优缺点:
优点:作业速度快、精度高、能耗低;缺点:二台接收机工作时,构不成闭合图形(如图8-11),可靠性差。
3.准动态定位
(1)作业方法: 在测区选择一个基准点,安置接收机工连续跟踪所有可见卫星;将另一台流动接收机先置于1号站(如图8-12)观测;在保持对所测卫星连续跟踪而不失锁的情况下,将流动接收机分别在2,3,4……各点观测数秒钟。
(2)精度:基线的中误差约为1~2cm。
(3)应用范围: 开阔地区的加密控制测量、工程测量及碎部测量及线路测量等。
(4)注意事项: 应确保在观测时断上有5颗以上卫星可供观测;流动点与基准点距离不超过20 km;观测过程中流动接收机不能失锁,否则应在失锁的流动点上延长观测时间1~2min。
4.往返式重复设站
(1)作业方法: 建立一个基准点安置接收机连续跟踪所有可见卫星;流动接收机依次到每点观测1~2min;1h后逆序返测各流动点1~2min。设站布置如图8-13所示。
(2)精度: 相对于基准点的基线中误差为5mm+1ppm.D。
(3)应用范围:控制测量及控制网加密、取代导线测量及三角测量、工程测量机地籍测量。
(4)注意事项: 流动点与基准点距离不超过15km;基准点上空开阔,能正常跟踪3颗及以上卫星。
5.动态定位
(1)作业方法: 建立一个基准点安置接收机连续跟踪所有可见卫星;流动接收机先在出发点上静态观测数分钟;然后流动接收机从出发点开始连续运动;按指定的时间间隔自动运动载体的实时位置。作业布置如图8-14所示
(2)精度: 相对于基准点的瞬时点位精度1~2cm。
(3)应用范围: 精密测定运动目标的轨迹、测定道路的中心线、剖面测量、航道测量等。
(4)注意事项: 需同步观测5颗卫星,其中至少4颗卫星要连续跟踪;流动点与基准点距离不超过20 km。
6.实时动态测量的作业模式与应用
(1)实时动态(RTK)定位技术简介
实时动态(Real Time Kinematic-RTB)测量技术,是以载波相位观测量为根据的实时差分GPS(RTD GPS)测量技术,它是GPS测量技术发展中的一个新突破。
实时动态测量的基本思想是:在基线上安置一台GPS接收机,对所有可见GPS
卫星进行连续地测量,并将其观测数据,通过无线电传输设备,实时地发送给用户观测站。在用户站上,GPS接收机在接收GPS卫星信号的同时,通过无线电接收设备,接收基准站传输的观测数据,然后根据相对定位的原理,实时地计算并显示用户站的三维坐标及其精度。
(2)RTK作业模式与应用
根据用户的要求,目前实时动态测量采用的作业模式,主要有:
①快速静态测量
采用这种测量模式,要求GPS接收机在每一用户站上,静止地进行观测。在观测过程中,连同接收到的基准站的同步观测数据,实时地解算整周末知数和用户站的三维坐标。如果解算结果的变化趋于稳定,且其精度已满足设计要求,便可适时的结束观测。
采用这种模式作业时,用户站的接收机在流动过程中,可以不必保持对GPS卫星的连续跟踪,其定位精度可达1~2cm。这种方法可应用于城市、矿山等区域性的控制测量,工程测量和地籍测量等。
②准动态测量
同一般的准动测量一样,这种测量模式,通常要求流动的接收机在观测工作开始之前,首先在某一起始点上静止地进行观测,以便采用快速解算整周未知数的方法实时地进行初始化工作。初始化后,流动的接收杨在每一观测站,只需静止观测数历元,并连同基准站的同步观测数据,实时地解算流动站的三维坐标。目前,其定位的精度可达厘米级。
该方法要求接收机在观测过程中,保持对所测卫星的连续跟踪。一旦发生失锁,便需重新进行初始化的工作。
准动态实时测量模式,通常主要应用于地籍测量、碎部测量、路线测量和工程放样等。
③动态测量
动态测量模式,一般需首先在某一起始点上,静止地观测数分钟,以便进行初始化工作。之后,运动的接收机按预定的采样时间间隔自动地进行观测,并连同基准站的同步观测数据,实时的确定采样点的空间位置。目前,其定位的精度可达厘米级。
这种测量模式,仍要求在观测过程中,保持对观测卫星的连续跟踪。一旦发生失锁,则需重新进行初始化的工作。这时,对陆上的运动目标来说,可以在卫星失锁的观测点上,静止地观测数分钟,以便重新初始化,或者利用动态初始化(AROF)技术,重新初始化,而对海上和空中的运动目标来说,则只有应用AROP技术,重新完成初始化的工作。
实时动态测量模式,主要应用于航空摄影测量和航空物探中采样点的实时定位,航空测量,道路中线测量,以及运动目标的精度导航等。
参考资料:GPS测量原理与应用
水准仪测量高程的方法和步骤 内容:理解水准测量的基本原理;掌握DS3 型微倾式水准仪、自动安平水准仪的构造特点、水准尺和尺垫;掌握水准仪的使用及检校方法;掌握水准测量的外业实施(观测、记录和检核)及内业数据处理(高差闭合差的调整)方法;了解水准测量的注意事项、精密水准仪和电子水准仪的构造及操作方法。 重点:水准测量原理;水准测量的外业实施及内业数据处理。 难点:水准仪的检验与校正。 §2.1 高程测量(Height Measurement )的概念 测量地面上各点高程的工作, 称为高程测量。高程测量根据所使用的仪器和施测方法的不同,分为: (1)水准测量(leveling) (2)三角高程测量(trigonometric leveling) (3)气压高程测量(air pressure leveling) (4)GPS 测量(GPS leveling) §2.2 水准测量原理 一、基本原理 水准测量的原理是利用水准仪提供的“水平视线”,测量两点间高差,从而由已知点高程推算出未知点高程。
a ——后视读数A ——后视点 b ——前视读数B ——前视点 1、A、B两点间高差: 2、测得两点间高差后,若已知A 点高程,则可得B点的高程:。 3、视线高程: 4、转点TP(turning point) 的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。 二、连续水准测量
如图所示,在实际水准测量中,A 、B 两点间高差较大或相距较远,安置一次水准仪不能测定两点之间的高差。此时有必要沿A 、B 的水准路线增设若干个必要的临时立尺点,即转点(用作传递高程)。根据水准测量的原理依次连续地在两个立尺中间安置水准仪来测定相邻各点间高差,求和得到A 、B 两点间的高差值,有: h 1 = a 1 -b 1 h 2 = a 2 -b 2 …… 则:h AB = h 1 + h 2 +…… + h n = Σ h = Σ a -Σ b 结论:A 、B 两点间的高差等于后视读数之和减去前视读数之和。 § 2.3 水准仪和水准尺 一、水准仪(level) 如图所示,由望远镜、水准器和基座三部分组成。
车载GPS地图匹配算法研究背景意义及现状 1研究背景及意义 (1) 2 国内外研究现状分析 (2) 3常见地图匹配算法分析 (3) 1研究背景及意义 当今社会,机动车数量迅猛增长,从而导致交通流量过快增长与有限的道路设施之间的矛盾激增,交通堵塞严重。如何的减少拥堵,有效地进行交通疏导,合理的利用有限的交通设施是当前亟待解决的难题,发展智能交通(ITS)是解决这些问题的有效方法。随着GPS(Global Positioning System)卫星定位技术和通信技术的日趋成熟,基于GPS的自动定位在智能交通系统中显示出其巨大的技术、经济和社会效益,基于GPS的自动定位关键技术是地图匹配技术。地图匹配(Map matching,简称MM)是一种基于软件技术的定位修正方法。地图匹配基于两个前提: 首先,车辆总是行驶在道路上; 其次,电子地图道路数据精度应高于浮动车车载导航系统的位置估计精度。 当上述条件满足时,将定位信息与道路信息进行比较,通过一定的匹配过程,确定出车辆最可能的行驶路段及车辆在此路段中最可能的位置。地图匹配算法的实现与电子地图有着密切的关系,电子地图必须具有正确的路网拓扑结构和足够高的精度才能完成地图匹配。地图匹配技术在ITS中的应用可以总结为以下三个方面: ①用于地图显示。地图匹配在ITS中最基本的应用是实现被跟踪车辆在电子地图上的显示。由于各种定位技术存在不同程度的定位误差,造成了车辆的定位点通常没有落在道路上。而ITS的大部分信息都要通过电子地图来显示,因此,必须通过地图匹配算法将车辆匹配到其正在行驶的道路上。 ②用于提高定位精度。由于高楼和高架桥阻挡接收机的信号等因素的影响,GPS有时无法提供足够的定位精度。航位推算可以实现车辆的自主导航,但需要车辆初始位置的输入,而且惯性期间的漂移误差和标定误差将使累积误差随时间而增大。此时可以利用地图匹配算法来改善定位精度,高精度的电子地图可用于修正定位估计的误差。 ③用于终端用户路径引导等应用。路径引导是帮助驾驶员沿预定的路线行驶从而顺利达到目的地的过程。为此,必须由地图匹配模块为路径引导模块提供当前车辆的准确位置,路径引导模块与地图信息相结合产生适当的实时驾驶指
动态压力风洞实验数据处理软件 使用手册
目录 第一章绪论 (1) 1.1风洞数据采集系统特点 (1) 1.2风洞数据采集系统现状与发展 (2) 1.3本软件主要功能特点 (3) 第二章动态压力测量方法 (5) 2.1 测压导管的传递函数 (5) 2.2 两通道的传递函数 (6) 2.3 不同外径导管传递函数的模值比和相位差 (7) 2.4 动态数据处理技术 (11) 2.5 结论 (12) 第三章动态压力风洞实验数据处理软件的设计与实现 (13) 3.1 软件需求分析 (13) 3.2 软件功能设计 (14) 3.3软件流程设计 (15) 3.4 软件界面设计 (17) 第四章动态压力数据处理系统调试 (24) 4.1 动态线性度检定 (24) 4.2 动态误差限检定 (24)
第一章绪论 1.1风洞数据采集系统特点 风洞是进行空气动力学研究的重要试验装置。风洞试验装置包括测量系统、数据采集系统、模型姿态及控制系统、风速控制系统等。风洞试验中要采集大量的数据,主要有试验模型的升力、阻力、力矩、模型表面压、温度、洞体压力、模型角度等,这些数据依靠热线风速仪、压力扫描阀、应变天平、激光位移计、加速度传感器等进行量测。早期,风洞试验为人工读数和手动方式,试验周期长,数据量大,试验精度低,处理周期长。为了提高风洞试验效率、试验精度及试验水平,从20世纪70年代开始,各风洞逐步引入了数据采集系统。由数据采集系统负责将来自天平或压力传感器等测量系统的电信号转化成数据,通过多通道数据采集板,把传感器送出的模拟信号转化成数字信号送计算机存储。 风洞数据采集系统具有如下特点: (1)高速、高精度、具有强的抗干扰能力 风洞试验数据的精度直接影响到试验对象的空气动力学设计的正确性。风洞数据采集系统应具有高速、高精度、具有强的抗干扰能力。气动力系数中模型的阻尼系数△CX的试验精度要达到0.0001,风洞各参数测量精度要求为总压精度0.07%,静压精度0.07%,总温精度1%,法向力精度0.08%,轴向力精度0.08%,迎角精度0.01%。 目前计算机技术在速度和内存量等方面不断提高,为高速、高精度、多路并行采集以及实时数据传输等创造了必要的条件。单路A/D数据采集系统来分时采集的多路数据采集系统在风洞试验中己成为基本配置,但其不能满足真正的实时、同步采集的要求。并行动态数据采集系统已成为一个基本的发展趋势。它将多路A/D采集电路并行处置,用同一个触发信号同时启动各路A/D进行编码,保证了各路信号采集的严格同步性,对某瞬态时刻各路信号的分析具有十分重要的意义。同时由于不再使用模拟开关,使各路信号间的串模干扰减到了最小,系统精度可获得进一步提高。 (2)采集参数多,点数多
§5.9 三角高程测量 三角高程测量的基本思想是根据由测站向照准点所观测的垂直角(或天顶距)和它们之间的水平距离,计算测站点与照准点之间的高差。这种方法简便灵活,受地形条件的限制较少,故适用于测定三角点的高程。三角点的高程主要是作为各种比例尺测图的高程控制的一部分。一般都是在一定密度的水准网控制下,用三角高程测量的方法测定三角点的高程。 5.9.1 三角高程测量的基本公式 1.基本公式 关于三角高程测量的基本原理和计算高差的基本公式,在测量学中已有过讨论,但公式的推导是以水平面作为依据的。在控制测量中,由于距离较长,所以必须以椭球面为依据来推导三角高程测量的基本公式。 如图5-35所示。设0s 为B A 、两点间的实测水 平距离。仪器置于A 点,仪器高度为1i 。B 为照准 点,砚标高度为2v ,R 为参考椭球面上B A ''的曲率半径。AF PE 、分别为过P 点和A 点的水准面。PC 是PE 在P 点的切线,PN 为光程曲线。当位于P 点的望远镜指向与 PN 图5-35
相切的PM 方向时,由于大气折光的影响,由N 点出射的光线正好落在望远镜的横丝上。这就是说,仪器置于A 点测得M P 、间的垂直角为2,1a 。 由图5-35可明显地看出,B A 、 两地面点间的高差为 NB MN EF CE MC BF h --++==2,1 (5-54) 式中,EF 为仪器高NB i ;1为照准点的觇标高度2v ;而CE 和MN 分别为地球曲率和折光影响。由 2 021s R CE = 2021s R MN ' = 式中R '为光程曲线PN 在N 点的曲率半径。设 ,K R R =' 则 2 0202.21S R K S R R R MN ='= K 称为大气垂直折光系数。 由于B A 、两点之间的水平距离0s 与曲率半径R 之比值很小(当km s 100=时,0s 所对的圆心角仅5'多一点),故可认为PC 近似垂直于OM ,即认为 90≈PCM ,这样PCM ?可视为直角三角形。则(5-54)式中的MC 为 2,10tan αs MC = 将各项代入(5-54)式,则B A 、两地面点的高差为 2 12 02,1022 01202,102,121tan 221tan v i s R K s v s R K i s R s h -+-+=--++ =αα 令式中 C C R K ,21=-一般称为球气差系数,则上式可写成
固体表面动态接触角的测定 一.目的与要求 1.了解固体表面接触角的测量及表面能的计算原理。 2.掌握润湿周长、接触角、表面能的实验测试方法及实验操作。 二.仪器与药品 DCA-150界面分析仪 正己烷(A.R.);无水乙醇(A.R.);二次蒸馏水;聚苯乙烯(Pst)样品 三.基本原理 接触角是表征固体物质润湿性最基本的参数之一,据测量的原理的不同,接触角又可分成平衡接触角和动态接触角(dynamic contact angle),动态接触角(包括前进接触角(advancing contact angle)和后退接触角(receding contact angle)两种。 早在20世纪初期,Wilhelmy测试液体表面张力及接触角的方法:将一定的待测液体装在特定容器中,尽可能垂直固定悬挂的铂金板,升起液面至刚好与铂金板的下边缘相接触,此时铂金板受到液面向下的拉力即为液体的表面张力r r = F w / (L·cosθ) (1) r-液体表面张力(Dyn /cm);F w —吊片所受的力(Dyn);L—润湿周长(cm);θ—接触角(°); 由于绝大多数的液体对于°铂金是完全润湿的,即接触角θ为0°,所以只要知道润湿周长,就可从(1)式很方便计算得到液体的表面张力 1.平衡接触角 又叫静态接触角,根据Wilhelmy理论,只要将待测固体加工成规定尺寸的片状样品,然后垂直悬挂与已知表面张力的液面接触,同样可以依据(1)计算得到液体在固体表面的平衡接触角。 2.动态接触角 Wilhelmy法:如图2依据Wilhelmy理论,把样品板插入到液体中然后抽出来,通过测量样品板受力变化计算得到液体在固体表面的动态接触角的大小。
Unit 6 Methods of Elevation Determination(高程测量方法) An elevation is a vertical distance above or below a reference datum.(高程是高于或低于一个参考基准的一个垂直距离。) Although vertical distance can be referenced to any datum, in surveying, the reference datum that is universally employed is that of mean sea level (MSL).(虽然垂直距离可以参考任何一个基准,但是在测量上,这个参考基准一般使用【employ使用、雇佣】的是平均海平面(MSL)) MSL is assigned a vertical value (elevation) of 0.000 ft or 0.000 m.(MSL被赋予【assign】一个0.000英尺或0.000米的高程) All other points on the earth can be described by the elevations above or below zero.(地球上所有其它点可以用高于或低于0的高程来描述) Permanent points whose elevations have been precisely determined (benchmarks) are available in most areas for survey use.(高程精确测出的永久点(水准点)被用于【available可利用、可用到的】大多数区域的测量工作) In China, 7 years of observations at tidal stations in Qingdao from 1950 to 1956 were reduced and adjusted to provide the Huanghai vertical datum of 1956.(在中国,利用青岛验潮站【tidal stations in Qingdao】从1950年到1956年7年的观测数据处理【reduce处理、分析、减少】和平差,建立了56黄海高程系统) In the 1987, this datum was further refined to reflect long periodical ocean tide change to provide a new national vertical datum of 1985, according to the observations at tidal stations from 1952 to 1979.(1987年,在依照了【according to】验潮站1952到1979年的观测资料后,这个基准【56基准】被进一步精确【refine精确、精制v.】——反映长时期海潮变化的85国家高程基准建立起来。) Although, strictly speaking, the national vertical datum may not precisely agree with the MSL at specific points on the earth’s surface, the term MSL is generally used to describe the datum.(虽然,严格说来【strictly speaking】,国家高程基准在特殊的【specific特定的、特殊的】点上与MSL并不恰好【precisely】吻合,术语MSL一般【generally】还是用来描述它【国家高程基准】) MSL is assigned a vertical value (elevation) of 0.000 ft or 0.000 m.(MSL高程的赋值为0.000英尺或米)Difference in elevation may be measured by the following methods:(James M. Anderson and Edward M. Mikhail. 1998)(高程的差异【高差】可以由下列方法测得(詹姆斯.安德森和爱德华.???)) 1. Direct or spirit leveling, by measuring vertical distances directly.(水准测量【Direct leveling、spirit leveling都是水准测量的意思】,直接测得垂直距离【高程】) Direct leveling is most precise method of determining elevations and the one commonly used.(水准测量是高程测量方法中精度最高、使用最普遍的方法) 2. Indirect or trigonometric leveling, by measuring vertical angles and horizontal or slope distances.(三角高程测量,利用测量竖直角和水平或斜距来测高程) 3. Stadia leveling, in which vertical distances are determined by tacheometry using engineer’s transit and level rod; plane-table and alidade and level rod; or self-reducing tacheometer and level rod.(视距高程测量,利用视距测量【tacheometry】,使用工程经纬仪和水准尺;平板仪和照准仪和水准尺;或者自处理视距仪【tacheometer视距仪、准距仪】和水准尺测得垂直距离【高程】) 4. Barometric leveling, by measuring the differences in atmospheric pressure at various stations by means of a barometer.(气压水准测量【Barometric大气压力】,通过使用气压计【barometer】测量不同站点大气压力的差值来测高程) 5. Gravimetric leveling, by measuring the differences in gravity at various stations by means of a gravimeter for geodetic purposes.(重力水准测量,通过使用【by means of】重力计测量不同站点的重力值差值来测高程,用于大地测量学的目的) 6. Inertial positioning system, in which an inertial platform has tree mutually perpendicular axes, one of which is “up”, so that the system yields elevation as one of the outputs.(惯性定位系统,含有一个惯性平台,具有三个互相【mutually 相互地】垂直【perpendicular垂直的】轴,其中一个是“向上”的,所以这个系统产生【yield产生v.】的输出【output 输出n.】其中一个就是高程。) Vertical accuracies from 15 to 50 cm in distances of 60 and 100 km, respectively, have been reported.(各自地
一、 RTK的作业过程 1.启动基准站 将基准站架设在空旷的控制点上,正确连接各仪器电缆,打开仪器,把基准站设置为动态测量模式。 2、建立新工程,定义坐标系统 新建一个文件夹,设置好测量参数,如椭球参数、投影参数等。这个文件夹中包括许多小文件,它们分别就是测量的成果文件与各种参数设置文件,如*、dat、*、cot、*、rtk、*、ini 等 打开手簿到主页面,点击设置—单位设置 第一项,设置坐标显示格式设置,即中央经线设置 1)在“中央经线”项里输入您当地的中央子午线经度,在“尺度比 (Scale)”里输入1、0000000 2)在“横坐标平移量(False Easting)”里输入+500000,在“纵坐标平 移量(False Northing)”输入0、0。 这几个参数输入后把光标移到下面的Save(保存),这时,位置显示格式设置好了,即以投影坐标形式显示,单位就是“米”,选这种格式显示的好处就就是:显示的结果与地形图上的坐标一致,在实际工作中便于定位。 第二项,“坐标系统(Map Datum)”, 点击它,在出现的列表项里选择“用户(User)”,点击后出现“用户参数(User Datum)” 参数项包括:DX,DY,DZ,DA,DF,这组参数各地的值都不一样, 要到当地测绘部门获取,设置好参数后,同样点击“保存”。 第三项,“距离与速度”单位,我们选择“米制(Metric)
第四项,高度单位选择“米(Meters)”; 第五项,“压力单位”,选择“毫巴(Millibars)”,至此,您的手持GPS 机已经根据您的需要设置好了,点击页面切换键返回到主菜单3、坐标转换即点校正 GPS测量的为WGS-84系坐标,而我们通常需要的就是在流动站上实时显示国家坐标系或当地独立坐标系下的坐标,因此要进行转换。点校正可以通过两种方式进行。 (1)在已知转换参数的情况下。如果有当地坐标系统与W CS84坐标系统的转换七参数,则可以在测量控制器中直接输入,建立坐标转换关系。如果上作就是在国家大地坐标系统下进行,而且知道椭球参数与投影方式以及基准点坐标,则可以直接定义坐标系统,建议在RTK测量中最好加入1-2个点校正,避免投影变形过大,提高数据可靠性。 (2)在不知道转换参数的情况下。如果在局域坐标系统中工作或任何坐标系统进行测量与放样工作,可以直接采用点校正方式建立坐标转换方式,平面至少3个点,如果进行高程拟合则至少要有4个水准点参与点校正。 4、流动站开始测量 (1)单点测量:在主菜单上选择“测量”图标打开,测量方式选择“RTK”,再选择“测量点”选项,即可进行单点测量。注意要在“固定解”状态下,才开始测量。 (2)放样测量:在进行放样之前,根据需要“键入”放样的点。当初始化完成后,在主菜单上选择“测量”图标打开,测量方式选择“RTK”,再选择“放样”选项,即可进行放样测量作业。在作业时,在手薄控制器上显示箭头及目前位置到放样点的方位与水平距离,观测值只需根据箭头的指示放
透析动态几何问题思考角度与分析方法 【摘要】以运动的观点来探索几何图形部分规律的问题称之为动态几何问题,本文主要通过动点问题和动线问题来分析解决动态几何存在的问题。 【关键词】几何问题;几何图形;动态几何;动点问题;动线问题;动图问题 以运动的观点来探索几何图形部分规律的问题称之为动态几何 问题,其特点是图形中的某个元素(点、线段、角等)或整个几何图形按某种规律运动,图形的各个元素在运动变化的过程中互相依存、和谐统一,体现了数学中的“变”与“不变”及由简单到复杂、由特殊到一般的辩证思想,它集代数与几何、概率统计等众多知识于一体,渗透了分类讨论、转化、数形结合、函数、方程等重要数学思想方法,问题具有开放性、综合性,近几年来,从中考考题上看,以动点问题、平面图形的平移、翻折、旋转、剪拼问题等为代表的动态几何题频频出现在填空、选择、解答等各种题型中,考查同学们对图形的直觉能力以及从变化中看到不变实质的数学洞察力,更重要的是考查探索创新能力。 解决动态几何题的策略是:把握运动规律,寻求运动中的特殊位置;在“动”中求“静”,在“静”中探求“动”的一般规律。通过探索、归纳、猜想,获得图形在运动过程中是否保留或具有某种性质。
有关动态问题主要要有三类:动点问题、动线问题、动图问题。题型一:点动型 点动型就是在三角形、矩形、梯形等一些几何图形上,设计一个或几个动点,并对这些点在运动变化的过程中产生的等量关系、变量关系、图形的特殊状态、图形间的特殊关系等进行研究。 解决此类动点几何问题常常用的是“类比发现法”,也就是通过对两个或几个相类似的数学研究对象的异同进行观察和比较,从一个容易探索的研究对象所具有的性质入手,去猜想另一个或几个类似图形所具有的类似性质,从而获得相关结论。类比发现法大致可遵循如下步骤:①根据已知条件,先从动态的角度去分析观察可能出现的情况。②结合某一相应图形,以静制动,运用所学知识(常见的有三角形全等、三角形相似等)得出相关结论。③类比猜想出其他情况中的图形所具有的性质。 例1:(1)如图①,当点m在点b左侧时,请你判断en与mf有怎样的数量关系?点f是否在直线ne上?都请直接写出结论,不必证明或说明理由; (2)如图②,当点m在bc上时,其它条件不变,(1)的结论中en与mf的数量关系是否仍然成立?若成立,请利用图②证明;若不成立,请说明理由; (3)若点m在点c右侧时,请你在图③中画出相应的图形,并判断(1)的结论中en与mf的数量关系是否仍然成立?若成立?请
首都师范大学本科毕业论文 车载GPS定位系统与地图匹配 —路径规划 Vehicle GPS positioning system and map-matching ----- Path Planning 论文作者_____________ 院系信息工程学院 专业计算机科学与技术 学号___________ 指导老师 完成日期_
中文提要 车辆作为人类活动的工具,它在人们的日常生活中起着越来越重要的作用,其发展速度也越来越快。如何有效地指挥和管理各种车辆调配问题已成为交通运输和安全管理部门面临的一个重要问题。本设计使用Visual C++开发工具以及 GIS控件MapX开发了GPS路径规划及其图形化显示的模块,在此平台上实现绘制地图以及GPS路径规划等功能。最短路径分析是地理信息系统(GIS)网络分 析的基础,拓扑关系是最短路径分析的关键。由于MapX不支持空间数据的拓扑 结构,因此对于采用MapX进行二次开发的用户来说,最短路径分析就成为一个难点。为此讨论了基于MapX的Dijkstra 算法,并在此基础上实现了基于MapX 的局部最短路径搜索方法。 关键词:GPS定位,MapX路径规划
Abstract Vehicles as a tool of huma n activities in people's daily life play an in creas in gly importa nt role, and its speed of developme nt is in creas in gly rapid. How to effectively comma nd and man ageme nt of vehicles deployme nt has become a major problem faced with the transport and safety management departments. This design using Visual C + + developme nt tools and GIS con trol MapX develops a GPS path pla nning and graphical display modules, and achieve mapp ing and GPS route pla nning in this platform. The shortest path of geographic information system (GIS) is the foundation of the network analysis ;The topology is the key of the analysis of the shortest path. Because MapX do not support the topology of spatial data, the shortest path an alysis has become a difficult questi on for MapX users who develop system sec on dly. This desig n discusses and realizes the algorithm based on the MapX Dijkstra. Key words: GPS positioning, MapX, path planning
简述系统动态特性及其测定方法 系统的特性可分为静态特性和动态特性。其中动态特性是指检测系统在被测量随时间变化的条件下输入输出关系。一般地,在所考虑的测量范围内,测试系统都可以认为是线性系统,因此就可以用一定常线性系统微分方程来描述测试系统以及和输入x (t)、输出y (t)之间的关系。 1) 微分方程:根据相应的物理定律(如牛顿定律、能量守恒定律、基尔霍夫电 路定律等),用线性常系数微分方程表示系统的输入x 与输出y 关系的数字方程式。 a i 、 b i (i=0,1,…):系统结构特性参数,常数,系统的阶次由输出量最高微分阶次决定。 2) 通过拉普拉斯变换建立其相应的“传递函数”,该传递函数就能描述测试装 置的固有动态特性,通过傅里叶变换建立其相应的“频率响应函数”,以此来描述测试系统的特性。 定义系统传递函数H(S)为输出量与输入量的拉普拉斯变换之比,即 式中S 为复变量,即ωαj s += 传递函数是一种对系统特性的解析描述。它包含了瞬态、稳态时间响应和频率响应的全部信息。传递函数有一下几个特点: (1)H(s)描述系统本身的动态特性,而与输入量x (t)及系统的初始状态无关。 (2)H(S)是对物理系统特性的一种数学描述,而与系统的具体物理结构无关。H(S)是通过对实际的物理系统抽象成数学模型后,经过拉普拉斯变换后所得出的,所以同一传递函数可以表征具有相同传输特性的不同物理系统。 (3)H(S)中的分母取决于系统的结构,而分子则表示系统同外界之间的联系,如输入点的位置、输入方式、被测量以及测点布置情况等。分母中s 的幂次n 代表系统微分方程的阶数,如当n =1或n =2 时,分别称为一阶系统或二阶系统。 一般测试系统都是稳定系统,其分母中s 的幂次总是高于分子中s 的幂次(n>m)。
给排水管道高程测量计算方式 一、主管、主井: 1、原地面高程:施工图纸上有,没有的由施工员提供。 2、基底高程:管内底标高-垫层-管壁厚。检查井基底=设计给的井底标高-垫层-底板。 3、垫层高程:参照图集,看多大的管子是多厚的垫层,再在基底高程上加上垫层的厚度。 4、管道基础:看设计图纸要求的是多少度的基础。比如180°砂砾石基础,D800的管子,就需要在垫层的高程上加上480mm(管子的一半加壁厚)。 5、管道铺设就抄管内底标高,图纸上有。 6、管道回填:看回填到哪个位置,一般设计要求管顶50cm填砂砾石,做一次回填。以上至结构层下填素土,做一次回填资料。如都是填砂砾石,就做一次回填就好。填筑顶面:管顶50cm就需在垫层的高程基础上+管子大小+两个壁厚+50cm。填到结构层下的填筑顶面:路中设计顶标高-结构层厚度。回填深度:填筑顶面标高-基底高程。 7、检查井回填:看设计要求井室周围用什么土质的材料填多宽。填筑顶面标高:设计给的井底标高+埋深深度-结构层厚度。回填深度:填筑顶面标高-基底高程。 二、支管、支井: 1、原地面高程:由施工员提供。 2、基底高程:=支管管内底标高-垫层-壁厚(设计图纸上给的支管管
内底标高是指接入主井内支管的管内底标高),接入支井内的支管管内底标高=设计图纸上给的支管管内底标高+支管长度*坡度(支井向主井流水的加,主井向支井流水的减)。管内底标高-垫层-管壁厚=基底高程。检查井基底=设计给的井底标高-垫层-底板。 3、垫层高程:参照图集,看多大的管子是多厚的垫层,再在基底高程上加上垫层的厚度。 4、管道基础:看设计图纸要求的是多少度的基础。比如180°砂砾石基础,D800的管子,就需要在垫层的高程上加上480mm(管子的一半加壁厚)。 5、管道铺设就抄管内底标高,图纸上有。 6、管道回填:看回填到哪个位置,一般设计要求管顶50cm填砂砾石,做一次回填。以上至结构层下填素土,做一次回填资料。如都是填砂砾石,就做一次回填就好。填筑顶面:管顶50cm就需在垫层的高程基础上+管子大小+两个壁厚+50cm。填到结构层下的填筑顶面:路中设计顶标高-结构层厚度。 7、检查井回填:看设计要求井室周围用什么土质的材料填多宽。填筑顶面标高:设计给的井底标高+埋深深度-结构层厚度(若支井在道路外面,不存在结构层就不需要减结构层厚度)。回填深度:填筑顶面标高-基底高程。
第30卷 第3期测 绘 学 报 Vol .30,No .3 2001年8月 ACT A GEODAET ICA et CAR TOGR AP HICA SI NI CA Aug .,2001 文章编号:1001-1595(2001)03-0252-05中图分类号:P228.4 文献标识码:A GPS 车辆导航中的实时地图匹配算法 苏 洁,周东方,岳春生 (解放军信息工程大学,河南郑州450002) Real -time Map -matching Algorithm in GPS Navigation System for Vehicles SU Jie,ZHOU Dong-fang,YU E Chun-sheng (I nf or ma tion Eng ineer ing Univer sity o f P LA ,Zhenz hou 450002,China ) Abstr act :According to t he given sour ce and mathemat ic model of matching er r or ,a algor ithm for real -t ime matching of GPS posit ioning r esults and digita l ma ps is put forwar d .The algor ithm is improved so t hat the precision of vehicle navigation is much higher with the basic har dwar e platforms available.F inally the stat is-tic r esults of r oad test ar e given. Key wor ds :vehicle navigation;GPS;GIS;pat tern r ecognition;err or r ect ify;fuzzy logic 摘 要:通过误差来源的分析和误差模型的建立,提出了一种车辆导航中GPS 定位测量与数字地图实时配准的地图匹配算法。这使得在现有的基本硬件配置条件下,车辆导航定位精度更高。最后对算法进行了分析,并给出了统计结果。 收稿日期:2000-08-16;修回日期:2000-12-30 作者简介:苏洁(1978-),女,湖南邵阳人,工学硕士,现从事汽车导航系统的研究。 关键词:车辆导航;GPS ;GIS ;模式识别;误差矫正;模糊逻辑 1 引 言 GPS 技术的成熟与发展,为各类运动载体的精密实时定位提供了有力保障。特别是在智能交通系统(Intelligent Tr ansportation Systems,ITS)中,基于GPS 的车辆自动定位/导航与监控系统的开发与应用正日益受到国内外各部门的重视,并显示出巨大的技术、经济和社会效益。在发达国家,由于经济实力雄厚,通讯基础设施完善,GPS /GIS 集成技术支持下的车辆导航与监控应用已经非常普及。目前国内车辆自主导航系统随着GIS 技术的提高和应用普及也已经有很大的 发展。 对于车载导航系统,获得车辆的精确定位是 最基本的要求。目前国外的车载导航系统采用了 航位推算(Dead Reckoning,DR),差分GPS 技 术,无线电信标,用高精度的载波相位接收机等提 高定位精度的方法等等。但这些方法要求成本较 高,技术实现复杂,且不太适合中国国土辽阔、地 形复杂的国情,所以实际系统中通常采用地图匹配算法来提高车辆导航系统的定位精度。 地图匹配方法是借助GIS 电子地图库中的高精度道路信息作为分类模板来进行模式识别, 根据识别结果来矫正GPS 接收数据的定位误差。
动态接触角及接触角滞后性的测量 用座滴法测量动态接触角有二种基本的方法: 1) 加液/减液法 就是在形成液滴后,再继续以很低的速度往液滴加入液体,使其体积不断增大。开始时,液滴与固体表面的接触面积并不发生变化,但接触角渐渐增大。当液滴的体积增大到某一临街值时,液滴在固体表面的三相接触线发生往外移动,而在发生移动前瞬间的接触角,被称为前进角。在此之后,接触角基本保持不变。 反之如果从一形成的液滴不断地以很低的速度把液体移走,使其体积减小。开始时,液滴与固体表面的接触面积也并不发生变化,但接触角渐渐减小。当液滴的体积减小到一定值时,液滴在固体表面的固/液/气三相接触线开始往里移动。在发生这一移动前夕的 接触角,就是后退角。在此之后,接触角也应基本保持不变。 1)加液/减液法测量前进/后退接触角 在运用这一方法时,必须注意以下几点: ?体积变化的速度应足够低,尽量保证液滴在整个过程有足够的时间来松弛,使得测量能在准平衡下进行。 ?由于这一过程中一般都有针头/毛细管的卷入以加入/移走液体,针头/毛细管的直径一定要(与液滴相比)足够小,使液体在针管/毛细管外壁上的润湿不会对液滴在固体表面的接触角产生影响。这一点尤其是对后退角的测量更为突出,否则测得的值将严重偏离真实值。 ?同样由于过程中针头/毛细管的卷入,使得液滴一般不再呈现中心轴对称,也不再能被看作是圆或椭圆的一部分,所以基于Young-Laplace或圆或椭圆方程式的计算方法都将遇到困难,带来较大误差。此时一般使用广义切线法,但此方法往往对少量的背景噪音较敏感。
2) 倾斜板(tilting plate)法 将一足够大体积的液滴置于待测的样品表面后,把样品表面朝一方缓慢、不断地倾 斜。当开始时液滴不发生移动,而只是其中的液体由后方向前方转移,使得前方的接触角不断增大,而后方的不断缩小。当倾斜到一定角度时,液滴开始发生滑动。发生滑动 前夕液滴的前角就是前进角,后角则为后退角。 2)倾斜板(tilting plate)测量前进/后退/起始滚动角 倾斜板法有二种实现方法: ?整体倾斜法:将整套测量仪置于摇篮状的倾斜架上,让包括摄像机,光学镜头,样品台,样品和光源等组件的整套仪器同时倾斜。这种构造和操作的主要优点在于:液滴相对于摄像机和光学镜头在整个过程中保持相对不倾斜,这样软件开发上就不必特殊处理,计算比较容易。而其缺点也很为明显:仪器越大、样品越大/越重,所需要的倾斜架也越大,显得很笨重;由于仪器上的所有东西都跟着一起倾斜,使得有些液体会倒出来,同时使得在倾斜作态无法加液产生液滴,也即液滴必须在倾斜前已经被置于样品表面。 ?局部倾斜法:只倾斜样品台和其上面的样品包括可能已放置上去的液滴,其它的所有部件均不倾向,保持不动。这样做法的优点显而易见,可以避免上面提到的所有缺点,使得仪器精巧,硬件制造成本降低,也能容许在任何倾斜角度下加液形成新液滴,或往已经形成的液滴加入液体。但其也对软件的开发提出了新的挑战,增加了不少难度和复杂性。
< <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<