第四章 喷绘机伺服驱动系统设计
4.1 喷绘机伺服驱动系统原理
4.1.1 喷绘机原理概述
电脑雕刻机和喷绘机都是大型喷墨打印机。喷绘机按工作原理可分为固体喷墨和液体喷墨两种,当今主流的喷墨打印机为液体喷绘机打印机。电脑雕刻 喷墨方式可分为雕刻机气泡式与液体压电式。气泡技术是通过加热喷嘴,使墨水产生气泡,喷到打印介质上的。墨水在高温下易发生化学变化,性质不稳定,所以打出的色彩真实性就会受到一定程度的影响;另一方面由于印花机墨水是通过气泡喷出的,刻字机墨水微粒的方向性与体积大小不好掌握,写真机打印线条边缘容易参差不齐,一定程度的影响了打印质量。压电式喷墨技术,墨水是由一个和热感应式喷墨技术类似的喷嘴所喷出,但是墨滴的形成方式是藉由缩小墨水喷出的电脑雕刻机区域来形成。而喷出区域的缩小,是藉由施加电压到喷出区内一个或多个压电板来控制的。由于微压电打印头技术是利用晶体加压时放电的特性,在常温状态下稳定的将墨水喷出。它有着对墨滴控制能力强的特点,容易实现1440dpi 的高精度打印质量,且微压电喷墨时无需加热,喷绘机墨水就不会因受热而发生化学变化,故大大降低了对墨水的要求。
4.1.2 喷绘机原理框图
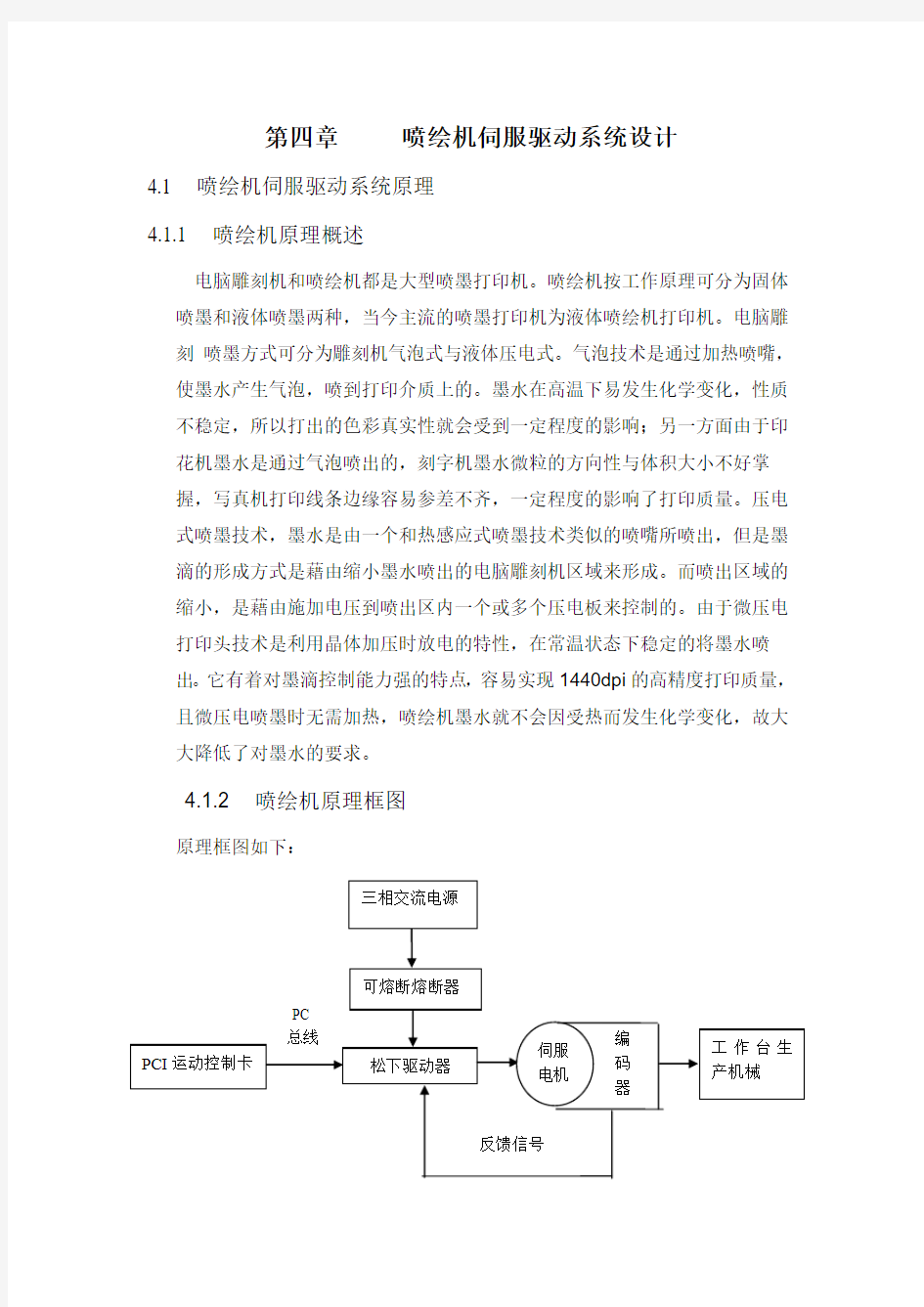
原理框图如下:
三相交流电源 可熔断熔断器 松下驱动器 PCI 运动控制卡 伺服 电机 PC 总线 编 码
器 工作台生产机械 反馈信号
4.1.3 喷绘机原理单元介绍
(1)熔断器
熔断器是根据电流超过规定值一定时间后,以其自身产生的热量使熔体熔化,从而使电路断开的原理制成的一种电流保护器。熔断器广泛应用于低压配电系统和控制系统及用电设备中,作为短路和过流保护是应用最普遍的保护器件之一。
熔断器是一种过电流保护电器。熔断器主要由熔体和熔管两个部分及外加填料等组成。使用时,将熔断器串联于被保护电路中,当被保护电路的电流超过规定值,并经过一定时间后,由熔体自身产生的热量熔断熔体,使电路断开,起到保护的作用。
(2)运动控制卡
运动控制卡是一种上位控制单元,可以控制伺服电机,是基于PC总线,利用高性能微处理器(如DSP )及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于语限位、原点开关等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能。这些功能能通过计算机方便地调用。
运动控制卡不仅要发送脉冲给电机驱动器,同时接受伺服电机编码器反馈的脉冲数,还接受光栅尺反馈信号,进而控制伺服电机的转速。伺服驱动器既要与运动控制卡有数据线连接,其本身还要连接插座电源。
如果你的运动控制卡时比较好的卡,伺服刷新率可以达到要求,可以把编码器反馈直接接到运动控制卡,形成一个整体的闭环。若对对精度有很高的要求可以用双闭环,运动控制卡就是根据要求x-y平台运行的位置,控制电机运动到准确的位置。
(3)PC总线
现有的放开式数控系统实现方案主要采用PC机和数控系统结合的方法,PC 机作为上位机实现较为复杂的网络通信,人机交互等功能,数控系统作为下位机将上位机输入的运行参数经过处理交给执行部件执行,同时将检测系统的反馈信息上传给上位机实现实时监控,各个模块之间协调工作互不干扰,给系统升级带来了方便。
放开式系统动态控制器的核心是DSP,它具有运算速度快,支持复杂运动算法的特点,可以满足高精度运动控制的要求,因此,以DSP为核心的多轴动态控制卡越来越广泛地应用在运动控制系统中,将多轴动态控制卡插在PC机扩展槽上,就可以组成高精度运动控制系统,位置反馈信号的采集、闭环控制计算及控制量的输出均由动态控制卡完成,极大的提高了运算速度和控制响应速度,将工控机的资源从烦琐的数据采集和计算中解决出来,从而可以更好的实施整个控制系统的管理。
(4)驱动器
1)驱动器概念
伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达。目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,I PM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。
伺服驱动器一般可以采用位置、速度和力矩三种控制方式,主要应用于高精度的定位系统,目前是传动技术的高端。
编码器(encoder)是将信号或数据进行编制、转换为可用以通讯、传输和
存储的信号形式的设备。
驱动器是一个驱动放大元件,只是把上位机(如运动控制卡)发来的一些信号进行放大,以致使电机可以运转起来。MAC系列运动控制卡是基于总线的电机运动控制卡。采用专用控制芯片为核心器件,输入输出信号均为光电隔离,可与各种类型的步进电机驱动器连接,驱动步进电机,构成高精度位置控制系统或调速系统。可与PC机构成主从式控制结构:PC机负责人机界面的管理和其它管理工作;而控制卡负责运动控制方面的所有细节。用户通过我们提供的动态链接库可方便快速的开发出自己需要的运动控制功能。
2) 驱动器结构
(5)编码器
1)编码器介绍
编码器把角位移或直线位移转换成电信号,前者成为码盘,后者称码尺.按照读出方式编码器可以分为接触式和非接触式两种.接触式采用电刷输出,一电刷接触导电区或绝缘区来表示代码的状态是“1”还是“0”;非接触式的接受敏感元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是“1”还是“0”,通过“1”和“0”的二进制编码来将采集来的物理信号转换为机器码可读取的电信号用以通讯、传输和储存。
按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
(REP)
2)编码器优点
工业控制中的定位,接近开关、光电开关的应用已经相当成熟了,而且很好用。可是,随着工控的不断发展,又有了新的要求,这样,选用旋转编码器的应用优点就突出了:
信息化:除了定位,控制室还可知道其具体位置;
柔性化:定位可以在控制室柔性调整;
现场安装的方便和安全、长寿:拳头大小的一个旋转编码器,可以测量从几个μ到几十几百米的距离,n个工位,只要解决一个旋转编码器的安全安装问题,可以避免诸多接近开关、光电开关在现场机械安装麻烦,容易被撞坏和遭高温、水气困扰等问题。由于是光电码盘,无机械损耗,只要安装位置准确,其使用寿命往往很长。
多功能化:除了定位,还可以远传当前位置,换算运动速度,对于变频器,步进电机等的应用尤为重要。
经济化:对于多个控制工位,只需一个旋转编码器的成本,以及更主要的安装、维护、损耗成本降低,使用寿命增长,其经济化逐渐突显出来。
如上所述优点,旋转编码器已经越来越广泛地被应用于各种工控场合。4)编码器工作原理
由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(P NP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-; Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。
信号连接—编码器的脉冲信号一般连接计数器PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。如单相联接,用于单方向计数,单方向测速。 A.B两相联接,用于正反向计数、判断正反向和测速。A、B、Z三相联接,用于带参考位修正的位置测量。
A、A-,
B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。对于TTL 的带有对称负信号输出的编码器,信号传输距离可达150米。对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
自动控制原理课程设计题目速度伺服控制系统设计 专业电气工程及其自动化 姓名 班级 学号 指引教师 机电工程学院 12月
目录一课程设计设计目 二设计任务 三设计思想 四设计过程 五应用simulink进行动态仿真六设计总结 七参照文献
一、课程设计目: 通过课程设计,在掌握自动控制理论基本原理、普通电学系统自动控制办法基本上,用MATLAB实现系统仿真与调试。 二、设计任务: 速度伺服控制系统设计。 控制系统如图所示,规定运用根轨迹法拟定测速反馈系数' k,以 t 使系统阻尼比等于0.5,并估算校正后系统性能指标。 三、设计思想: 反馈校正: 在控制工程实践中,为改进控制系统性能,除可选用串联校正方式外,经常采用反馈校正方式。常用有被控量速度,加速度反馈,执行机构输出及其速度反馈,以及复杂系统中间变量反馈等。反馈校正采用局部反馈包围系统前向通道中一某些环节以实现校正,。从控制观点来看,采用反馈校正不但可以得到与串联校正同样校正效果,并且尚有许多串联校正不具备突出长处:第一,反馈校正能有效地变化
被包围环节动态构造和参数;第二,在一定条件下,反馈校正装置特性可以完全取代被包围环节特性,反馈校正系数方框图从而可大大削弱这某些环节由于特性参数变化及各种干扰带给系统不利影响。 该设计应用是微分负反馈校正: 如下图所示,微分负反馈校正包围振荡环节。其闭环传递函数为 B G s ()=00t G s 1G (s)K s +()=22t 1T s T K s ζ+(2+)+1 =22'1T s 21Ts ζ++ 试中,'ζ=ζ+t K 2T ,表白微分负反馈不变化被包围环节性质,但由于阻尼比增大,使得系统动态响应超调量减小,振荡次数减小,改进了系统平稳性。 微分负反馈校正系统方框图
机电伺服系统设计
基于PLC 的交流伺服系统设计 1.设计要求 以教材P133页机械传动系统为例,试根据给定参数(必须改变Z2:Z1)选择松下或者安川交流伺服系统并进行校核。 确定伺服系统的电子齿轮参数,并在此基础上以plc 作为控制器,采用位置模式(或者速度模式)对伺服系统进行控制,试设计实验系统并调试运行,完成设计报告。给出电路图,plc 程序以及电机参数设计。 伺服系统的结构如教材P133图6-18所示,参数如下: 齿数比:4/5/12=Z Z ; 指令脉冲当量:脉冲/01.0mm l g =?; 编码器每转反馈脉冲数:r p f /12000脉冲= ; 丝杠螺距:mm d B 10=; 快进速度:min /12000mm v F =; 丝杠飞轮惯量:22 2 10 94.2m N GD B ??=-; 齿轮2飞轮惯量:22 221064.17m N GD ??=-; 齿轮1飞轮惯量:22 2 11045.2m N GD ??=-; 每次进给长度:l =150mm ; 每次进给时间:s t 10≤; 每次进给次数:N =20; 工作台轴向运动力:m N Fc ?=1960; 驱动效率:9.0=η; 摩擦系数:1.0=μ。 2.设计过程 1) 电动机每转位移量mm Z Z d S B 85 4 1021=?==?; 2) 脉冲当量(位置分辨率)l ?,反馈脉冲当量l ?=pulse mm P s l f /00067.012000 8 ==?= ?,脉冲当量为0.01mm/pulse,两者不符,故使用电子齿轮。
pulse mm pulse mm B A B A l l g /01.0/120008=?=?=?, 所以 158 1200001.0=?=B A ,100,1500==B A ; 3) 电动机转速 因快进速度min /12000mm v F =,mm d B 10=,4/5/21=Z Z ,所以电动机应有的最高转速为min /15004 5 1012000r n =?= ; 4) 指令脉冲频率 s l v f g F g 脉冲3102060 1 01.012000601?=?=??= 每次进给位置信息存储地址数1500001 .0150 ==?=g l m ; 5) 负载转矩 ()m N S W F S F M c L ?=?????+= ??+=???= 05.38109.028.92001.020******** 33ππημπ 6) 负载飞轮惯量2 GD ,工作台换算到电动机轴上 22 32320127.01028196041024m N S W GD T ?=? ? ? ?????=??? ????=ππ 换算到电动机轴上的负载总飞轮惯量 () ()2 2 2 22222122168912.025 16 0294.01764.00245.00127.054m N GD GD GD GD GD GD B T L ?=?+++=? ?? ???++++= 7) 选定伺服电动机 电动机的额定转矩N M 应大于或等于m N M L ?=1.62, ??-=?? ? ??-=222 )02852.00095.0(311m N G GD L m 额定转速m in /1500r , 选择预选松下伺服伺服电动机MSMA202A1G ,小惯量20W 带键槽200V 的无制动器的伺服电机。选用的是r p /2500五线制增量式编码器(分辨率为10000)额定功率200V ,额定转速 m in /3000r 。驱动器选择与之配套的松下MINAS-A4系列MSDA203A1A ,所选电机及驱动器满足 要求。
辽宁工程技术大学《电力拖动自动控制系统》课程设计 目录 1、前言 (1) 1.1设计目的 (1) 1.2设计内容 (1) 2、伺服系统的基本组成原理及电路设计 (2) 2.1伺服系统基本原理及系统框图 (2) 2.2 伺服系统的模拟PD+数字前馈控制 (4) 2.3 伺服系统的程序 (6) 3、仿真波形图 (9) 结论 (12) 心得与体会 (13) 参考文献 (14)
1、前言 1.1设计目的 1、使学生进一步掌握电力拖动自动控制系统的理论知识,培养学生工程设计能力和综合分析问题、解决问题的能力; 2、使学生基本掌握常用电子电路的一般设计方法,提高电子电路的设计和实验能力; 3、熟悉并学会选用电子元器件,为以后从事生产和科研工作打下一定的基础。 1.2设计内容 1、分析和设计具有三环结构的伺服系统,用绘图软件(matlab)画原理图还有波形图; 2、分析并理解具有三环结构的伺服系统原理。
2、伺服系统的基本组成原理及电路设计 2.1伺服系统基本原理及系统框图 伺服系统三环的PID控制原理: 以转台伺服系统为例,其控制结构如图2-1所示,其中r为框架参考角位置输入信号, 为输出角位置信号. 图2-1 转台伺服系统框图 伺服系统执行机构为典型的直流电动驱动机构,电机输出轴直接与负载-转动轴相连,为使系统具有较好的速度和加速度性能,引入测速机信号作为系统的速度反馈,直接构成模拟式速度回路.由高精度圆感应同步器与数字变换装置构成数字式角位置伺服回路. 转台伺服系统单框的位置环,速度环和电流环框图如图2-2,图2-3和图2-4所示. 图2-2 伺服系统位置环框图 图2-3 伺服系统速度环框图
伺服驱动系统设计方案 伺服电机的原理: 伺服的基本概念是准确、精确、快速定位。与普通电机一样,交流伺服电机也由定子和转子构成。定子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差90°电角度。伺服电机内部的转子是永磁铁,驱动控制的u/V/W三相电形成电磁场转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度{线数)。 伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降作用:伺服电机,可使控制速度,位置精度非常准确。 交流伺服电机的工作原理和单相感应电动机无本质上的差异。但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 图3 伺服电动机的转矩特性
第一章伺服系统概述 伺服系统是以机械参数为控制对象的自动控制系统。在伺服系统中,输出量能够自动、快速、准确地跟随输入量的变化,因此又称之为随动系统或自动跟踪系统。机械参数主要包括位移、角度、力、转矩、速度和加速度。 近年来,随着微电子技术、电力电子技术、计算机技术、现代控制技术、材料技术的快速发展以及电机制造工艺水平的逐步提高,伺服技术已迎来了新的发展机遇,伺服系统由传统的步进伺服、直流伺服发展到以永磁同步电机、感应电机为伺服电机的新一代交流伺服系统。 目前,伺服控制系统不仅在工农业生产以及日常生活中得到了广泛的应用,而且在许多高科技领域,如激光加工、机器人、数控机床、大规模集成电路制造、办公自动化设备、卫星姿态控制、雷达和各种军用武器随动系统、柔性制造系统以及自动化生产线等领域中的应用也迅速发展。 1.1伺服系统的基本概念 1.1.1伺服系统的定义 “伺服系统”是指执行机构按照控制信号的要求而动作,即控制信号到来之前,被控对象时静止不动的;接收到控制信号后,被控对象则按要求动作;控制信号消失之后,被控对象应自行停止。 伺服系统的主要任务是按照控制命令要求,对信号进行变换、调控和功率放大等处理,使驱动装置输出的转矩、速度及位置都能灵活方便的控制。
1.1.2伺服系统的组成 伺服系统是具有反馈的闭环自动控制系统。它由检测部分、误差放大部分、部分及被控对象组成。 1.1.3伺服系统性能的基本要求 1)精度高。伺服系统的精度是指输出量能复现出输入量的精确程度。 2)稳定性好。稳定是指系统在给定输入或外界干扰的作用下,能在短暂的调节过程后,达到新的或者恢复到原来的平衡状态。 3)快速响应。响应速度是伺服系统动态品质的重要指标,它反映了系统的跟踪精度。 4)调速范围宽。调速范围是指生产机械要求电机能提供的最高转速和最低转速之比。 5)低速大转矩。在伺服控制系统中,通常要求在低速时为恒转矩控制,电机能够提供较大的输出转矩;在高速时为恒功率控制,具有足够大的输出功率。 6)能够频繁的启动、制动以及正反转切换。 1.1.4 伺服系统的种类 伺服系统按照伺服驱动机的不同可分为电气式、液压式和气动式三种;按照功能的不同可分为计量伺服和功率伺服系统,模拟伺服和功率伺服系统,位置
自动控制理论课程设计 设计题目雷达天线伺服控制系统 姓名 学号 专业 班级 指导教师 设计时间
目录 第一章绪论 (1) 1.1课题背景及意义 (1) 1.2课题研究的目的 (1) 1.3课题研究的主要内容 (2) 第二章系统的总体设计 (3) 2.1系统的组成图 (3) 2.2控制系统的结构图 (3) 2.3系统的简化方框图及简单计算 (4) 2.4系统的动态分析 (6) 第三章系统的根轨迹和伯德图 (7) 3.1系统的根轨迹图及分析 (7) 3.2系统的Bode图及分析 (8) 第四章校正设计 (10) 4.2校正后的根轨迹图及分析 (12) 4.2校正后的Bode图及分析 (13) 第五章总结 (15) 参考文献 (16)
第一章绪论 1.1课题背景及意义 雷达天线伺服控制系统是用来控制天线,使之准确地自动跟踪空中目标的方向,也就是要使目标总是处于天线轴线的方向上的,用来精确地跟随或复现某个过程的反馈控制系统,又称随动系统,主要解决位置跟随系统的控制问题。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度,加速度的反馈控制系统,并要求具有足够的控制精度。其作用是使输出的机械位移(或转角)准确地跟踪输入地位移(或转角)。伺服系统的结构组成和其他形式反馈控制系统没有原则上的区别,它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。 雷达天线伺服控制系统,可以准确确定障碍物的位置。利用雷达天线伺服控制系统可以探测飞机、舰艇、导弹以及其他军事目标,信息处理、数字处理,收集、综合地面运动目标和固定目标的情报及图像,还可以探测低空飞行的威胁,为用户提供包含面广的威胁画面。对空搜索、边搜索边测距、空地测距、自动检测;除了军事用途外,雷达在交通运输上可以用来为飞机、船只导航;在天文学上可以用来研究星体;在气象上可以用来探测台风,雷雨,乌云等等。雷达天线伺服控制系统的优点是白天黑夜均能探测远距离的目标,且不受雾、云和雨的阻挡,具有全天候、全天时的特点,并有一定的穿透能力。然而雷达天线伺服控制系统在洪水监测、海冰监测、土壤湿度调查、森林资源清查、地质调查等方面显示了很好的应用潜力。 1.2课题研究的目的 雷达天线伺服控制系统的设计目的是通过采取各种控制策略,快速,准确,稳定,可靠地跟踪目标,使天线伺服系统的天线座驾的机械轴随控制指令运动,并能使天线的电轴始终对准目标,完成各项任务,并确保天线伺服系统安全,可靠,长期,稳定地工作。利用电磁波探测目标的电子设备,发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。而在我们设计的伺服控制系统中,天线的转动要求
陀螺转台的伺服系统设计 院系自动化学院 专业自动化 班级4407202 学号200403072045 姓名杨林 指导教师张红梅 负责教师 沈阳航空工业学院 2008年6月
摘要 陀螺仪表试验转台是一种航空仪表地面现场测试的专用设备,主要由高精度转台和控制系统组成。本文主要设计了转台的控制系统。首先介绍了陀螺转台的结构及工作原理,然后基于陀螺转台的工作原理设计出转台控制系统的原理图,再根据转台控制系统的原理图,对系统的各组成环节进行建模,最后得出各环节的数学模型。经过分析得出转台控制系统共由五部分组成,分别是:比较环节、校正环节、检测环节、晶闸管整流装置和直流力矩电机。转台控制系统主要完成对角位置信号的跟踪。本次设计的主要目的是提高转台的控制精度,改善系统的动态品质。基于MATLAB/SIMULINK对系统进行仿真研究,并完成软件的调试。仿真结果表明本设计能够完成转台的角位置跟踪。 关键词:陀螺转台;控制系统;SIMULINK仿真
Abstract Gyro testing turntable is the appropriation equipment used to test the special ground aviation equipment, it is made of high accuracy turntable and the control system. The design is mainly about turntable control system. First, it introduces structure and working principle of gyro turntable, then, based on the principle gyro turntable, design a schematic of turntable control system, according to the schematic of turntable control system’s principle, set up the model of system's parts, at last, got the math modeling of each part. After analysis, turntable control system is from a total of five parts. namely: comparing links, links correction, testing links, SCR devices and DC torque motor. The turntable control system to complete the main diagonal position signal tracking. The design of the main purpose is to improve the accuracy of the control table and improve the quality of the dynamic. The system is imitated by the soft ware MATLAB/ SIMULINK and completed software debugging. The simulation results show that the designed system to complete the corner location tracking. Keywords: Gyro platform; control system; SIMULINK simulation
概述 用来精确地跟随或复现某个过程的反馈控制系统。又称随动系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。位置指令与被控量可以是直线位移或角位移。随着工程技术的发展,出现了各种类型的位置随动系统。由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。伺服系统的精度主要决定于所用的测量元件的精度。此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理 图1-1 雷达天线伺服控制系统原理图 系统的结构组成 从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。 现在对系统的组成进行分析: 1、受控对象:雷达天线 2、被控量:角位置m θ。 3、干扰:主要是负载变化(f 及L T )。 4、给定值:指令转角*m θ。 5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。 6、比较计算:两电位器按电桥连接,完成减法运算*U U e -=(偏差)。 7、控制器:放大器,比例控制。 8、执行器:直流电动机及减速箱。
?、伸缩缝损坏现状 伺服驱动系统设计方案 伺服电机的原理: 伺服的基本概念是准确、精确.快速定位。与普通电机一样,交流伺服电机也由定子和转子构成。;^^子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间柑差90°电角度。 伺服电机内部的转子是永磁铁,驱动控制的U/V/W三相电形成电磁场转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反惯值与目标值进行比较,调整转子转动的角度0伺服电机的精度决世于编码器的精度{线数)。 伺服电动机又称执行电动机?在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出.其主要特点是,当信号电压为零时无自转现彖.转速随着转矩的增加而匀速下降作用:伺服电机/可使控制速度,位置精度非常准确。 交流伺服电机的工作原理和单相感应电动机无本质上的差异。但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓“自转"现象,即无控制信号时,它不应转动,特别是当它已在转动时.如果控制信号消失,它应能立即停止转动。而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: lx起动转矩大 由于转子电阻大,苴转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2 相比,有明显的区别。它可使临界转差率so>r这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩0因此,当;^子一有控制电压,转子立即转动,即具有起动快、灵敏度髙的特点。
。 电液伺服控制系统的设计与仿真 引言 电液伺服系统具有响应速度快、输出功率大、控制精确性高等突出优点,因而在航空航天、军事、冶金、交通、工程机械等领域得到广泛应用。随着电液伺服阀的诞生,使液压伺服技术进入了电液伺服时代,其应用领域也得到广泛的扩展。随着液压系统逐渐趋于复杂和对液压系统仿真要求的不断提高,传统的利用微分方程和差分方程建模进行动态特性仿真的方法已经不能满足需要。因此,利用AMESim、Matlab/Simulink等仿真软件对电液伺服控制系统进行动态仿真,对于改进系统的设计以及提高液压系统的可靠性都具有重要意义。 1 液压系统动态特性研究概述 随着液压技术的不断发展与进步和应用领域与范围的不断扩大,系统柔性化与各种性能要求更高,采用传统的以完成执行机构预定动作循环和限于系统静态性能的系统设计远远不能满足要求。因此,现代液压系统设计研究人员对系统动态特性进行研究,了解和掌握液压系统动态工作特性与参数变化,以提高系统的响应特性、控制精度以及工作可靠性,是非常必要的。 液压系统动态特性简述 … 液压系统动态特性是其在失去原来平衡状态到达新的平衡状态过程中所表现出来的特性,原因主要是由传动与控制系统的过程变化以及外界干扰引起的。在此过程中,系统各参变量随时间变化性能的好坏,决定系统动态特性的优劣。系统动态特性主要表现为稳定性(系统中压力瞬间峰值与波动情况)以及过渡过程品质(执行、控制机构的响应品质和响应速度)问题。 液压系统动态特性的研究方法主要有传递函数分析法、模拟仿真法、实验研究法和数字仿真法等。数字仿真法是利用计算机技术研究液压系统动态特性的一种方法。先是建立液压系统动态过程的数字模型——状态方程,然后在计算机上求出系统中主要变量在动态过程的时域解。该方法适用于线性与非线性系统,可以模拟出输入函数作用下系统各参变量的变化情况,从而获得对系统动态过程直接、全面的了解,使研究人员在设计阶段就可预测液压系统动态性能,以便及时对设计结果进行验证与改进,保证系统的工作性能和可靠性,具有精确、适应性强、周期短以及费用低等优点。 仿真环境简介 基于Matlab平台的Simulink是动态系统仿真领域中著名的仿真集成环境,它在众多领域得到广泛应用。Simulink借助Matlab的计算功能,可方便地建立各种模型、改变仿真参数,有效解决了仿真技术中的问题。Simulink提供了交互的仿真环境,既可通过下拉菜单进行仿真,也可通过命令进行仿真。虽然Simulink提供了丰富的模块库,但是在Matlab/Simulink下对液压系统进行建模及仿真需要做很多简化工作,而模型的简化使得仿真结果往往出现一定的误差。AMESim (Advanced Modeling Environment for Simulation of Engineering Systems)是法国IMAGINE公司开发的一套高级仿真软件。它是一个图形化的开发环境,用于工程系统的建模、仿真和动态性能分析。AMESim的特点是面向工程应用从而使其成为
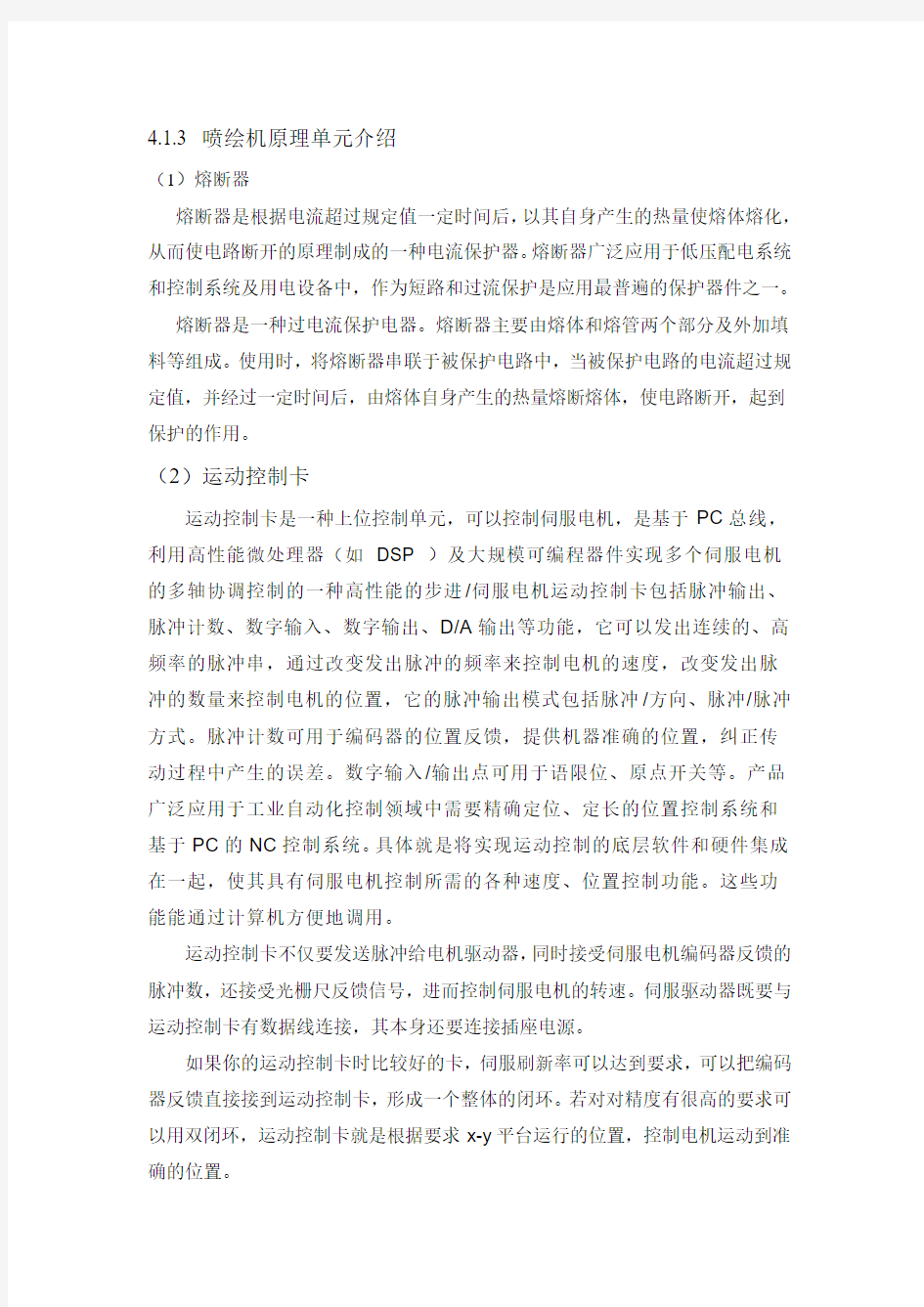
第四章 喷绘机伺服驱动系统设计 4.1 喷绘机伺服驱动系统原理 4.1.1 喷绘机原理概述 电脑雕刻机和喷绘机都是大型喷墨打印机。喷绘机按工作原理可分为固体喷墨和液体喷墨两种,当今主流的喷墨打印机为液体喷绘机打印机。电脑雕刻 喷墨方式可分为雕刻机气泡式与液体压电式。气泡技术是通过加热喷嘴,使墨水产生气泡,喷到打印介质上的。墨水在高温下易发生化学变化,性质不稳定,所以打出的色彩真实性就会受到一定程度的影响;另一方面由于印花机墨水是通过气泡喷出的,刻字机墨水微粒的方向性与体积大小不好掌握,写真机打印线条边缘容易参差不齐,一定程度的影响了打印质量。压电式喷墨技术,墨水是由一个和热感应式喷墨技术类似的喷嘴所喷出,但是墨滴的形成方式是藉由缩小墨水喷出的电脑雕刻机区域来形成。而喷出区域的缩小,是藉由施加电压到喷出区内一个或多个压电板来控制的。由于微压电打印头技术是利用晶体加压时放电的特性,在常温状态下稳定的将墨水喷出。它有着对墨滴控制能力强的特点,容易实现1440dpi 的高精度打印质量,且微压电喷墨时无需加热,喷绘机墨水就不会因受热而发生化学变化,故大大降低了对墨水的要求。 4.1.2 喷绘机原理框图 原理框图如下: 三相交流电源 可熔断熔断器 松下驱动器 PCI 运动控制卡 伺服 电机 PC 总线 编 码 器 工作台生产机械 反馈信号
4.1.3 喷绘机原理单元介绍 (1)熔断器 熔断器是根据电流超过规定值一定时间后,以其自身产生的热量使熔体熔化,从而使电路断开的原理制成的一种电流保护器。熔断器广泛应用于低压配电系统和控制系统及用电设备中,作为短路和过流保护是应用最普遍的保护器件之一。 熔断器是一种过电流保护电器。熔断器主要由熔体和熔管两个部分及外加填料等组成。使用时,将熔断器串联于被保护电路中,当被保护电路的电流超过规定值,并经过一定时间后,由熔体自身产生的热量熔断熔体,使电路断开,起到保护的作用。 (2)运动控制卡 运动控制卡是一种上位控制单元,可以控制伺服电机,是基于PC总线,利用高性能微处理器(如DSP )及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于语限位、原点开关等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能。这些功能能通过计算机方便地调用。 运动控制卡不仅要发送脉冲给电机驱动器,同时接受伺服电机编码器反馈的脉冲数,还接受光栅尺反馈信号,进而控制伺服电机的转速。伺服驱动器既要与运动控制卡有数据线连接,其本身还要连接插座电源。 如果你的运动控制卡时比较好的卡,伺服刷新率可以达到要求,可以把编码器反馈直接接到运动控制卡,形成一个整体的闭环。若对对精度有很高的要求可以用双闭环,运动控制卡就是根据要求x-y平台运行的位置,控制电机运动到准确的位置。
测试转台伺服分系统方案 1.概述: 本伺服分系统根据转台系统技术要求,主要完成控制和驱动转台方位连续可调的运动,并能定位在任意方位角。 2.主要技术指标: 转台运动范围:0~360° 转台定位精度:≤0.2° 转台运动速度:0~5°/sec 转台运动加速度:0~5°/sec2 3.系统的主要功能 系统的工作方式有待机、手动、连续转动、遥控、外控。可完成转台的连续转动和定位,手动方式是用机箱面板上的手轮控制转台转动,外控方式是在室外用一个控制盒控制转台转动,遥控方式是其它计算机通过串口控制转台转动。 4.伺服分系统组成 伺服分系统由控制单元(ACU)、驱动单元(ADU)、轴角编码单元及安装在转台上的执行元件、测量元件和控保元件组成,如下图1所示。
图1 伺服分系统组成框图 伺服分系统可作成一个4U的全密闭机箱。机箱面板上有操作开关、方位角度显示等。 控制单元ACU是转台控制中心。它完成转台运动的各种控制,各种控制策略的实时实施。 轴角编码器单元将自整角同步机测到的转台转轴的角度转化为数字量,用于转台的位置显示和位置控制。 驱动单元(ADU)由功率放大、环路控制等组成,主要完成对转台转轴的执行电机进行驱动。 转台转轴的执行电机采用交流伺服电机,因其无电刷磨损问题,可靠性高,寿命长,免维护。 4.1 控制单元 控制单元是以单片机为基础,集控制、监视、计算、通讯于一体,对转台实现安全可靠的操控的控制器,它与终端的通讯采用串口通讯。
根据不同的工作方式,ACU产生相应的控制信号,通过驱动单元驱动转台运动,从而使转台转向指定角度。 ACU是操作人员进行操作的中心,具有丰富而简洁的显示和友好的操控界面。 ACU的主要工作方式为:待机,手动,连续转动,遥控,外控等。4.2 轴角编码器 轴角的测量元件采用自整角同步机,这种角度敏感元件较之光电码盘有更高的可靠性和高低温适应能力。 轴角编码器的核心芯片采用大规模集成专用芯片RDC。RDC主要由输入缓冲器、比例乘法器、误差比较器、相敏检波器、积分器、压控振荡器、可逆计数器、三态输出锁存器和控制逻辑等构成。RDC 转换器集成度高、精度高、能够闭环工作,直接将来自测角元件自整角同步机的被角度调制的角度信号转换成二进制数字角度值。轴角编码器与控制单元可集成在一个印制板上,如上图中的印制板就已包括轴角编码器。 4.3 驱动单元 驱动单元ADU将来自ACU的代表速度的信号转换成三相交流电压加给电动机。驱动电机选用交流伺服电动机,电机轴上带有制动器。交流伺服电动机的优点是无碳刷,无换向火花,可靠性高,寿命长。驱动单元还包括控保电路,进行故障联锁保护。 5.工作原理 伺服分系统采用交流伺服电机驱动转台的转轴。ACU输出模拟电
《伺服控制系统课程设计》 指导书 ?动化与电??程学院 ?零??年??
?、伺服控制系统课程设计的意义、?标和程序 (3) ?、伺服控制系统课程设计内容及要求 (5) 三、考核?式和报告要求 (11)
?、伺服控制系统课程设计的意义、?标和程序 (?)伺服控制系统程设计的意义 伺服控制系统课程设计是?动化专业?才培养计划的重要组成部分,是实现培养?标的重要教学环节,是?才培养质量的重要体现。通过伺服控制系统课程设计,可以培养考??所学基础课及专业课知识和相关技能,解决具体的?程问题的综合能?。本次课程设计要求考?在指导教师的指导下,独?地完成伺服控制系统的设计和仿真,解决与之相关的问题,熟悉伺服控制系统中控制器设计与整定、电机建模和仿真和其他检测装置的选型以及?程实践中常?的设计?法,具有实践性、综合性强的显著特点。因?对培养考?的综合素质、增强?程意识和创新能?具有?常重要的作?。 伺服控制系统课程设计是考?在课程学习结束后的实践性教学环节;是学习、深化、拓宽、综合所学知识的重要过程;是考?学习、研究与实践成果的全?总结;是考?综合素质与?程实践能?培养效果的全?检验;也是?向?程教育认证?作的重要评价内容。 (?)课程设计的?标 课程设计基本教学?标是培养考?综合运?所学知识和技能,分析与解决?程实际问题,在实践中实现知识与能?的深化与升华,同时培养考?严肃认真的科学态度和严谨求实的?作作风。使考?通过综合课程设计在具备?程师素质??更快地得到提?。对本次课程设计有以下???的要求: 1.主要任务 本次任务在教师指导下,独?完成给定的设计任务,考?在完成任务后应编写提交课程设计报告。 2.专业知识
机电一体化 一维转台设计说明书 目录 课程设计的目的1 《机电一体化》设计任务及设计参数1 一、系统总体改造方案的确定2 二、工作台旋转机械部分的改进2 三、工作台升降机械部分改进6 四、最佳方案8 五、其他机械部分改进8 六、控制部分方案设计11 小结14 参考文献14 设计过程 课程设计的目的 1)学习机电一体化系统总体设计方案拟定、分析与比较的方法。 2)通过对机械系统的设计掌握几种典型传动元件与导向元件的工作原理、设计计算方法与选用原则。齿轮同步带减速装置、蜗杆副、滚珠丝杠螺母副、直线滚动导轨副等。 3)通过对进给伺服系统的设计,掌握常用伺服电动机的工作原理、计算选择方法与控制驱动方式,学会选用典型的位移速度传感器;如交流、步进伺服进给系统,增量式旋转编码器,直线光栅等。 4)通过对控制系统的设计,掌握一些典型硬件电路的设计方法和控制软件的设计思路;如控制系统选用原则、选择、存储器扩展、接口扩展、与配置、键盘与显示电路设计等,以及控制系统的管理软件、伺服电机的控制软件等。 5)培养学生独立分析问题和解决问题的能力,学习并初步树立“系统设计”的思路。 6)锻炼提高学生应用手册和标准、查阅文献资料以及撰写科技论文的能力。 设计参数 设计名称 转台的机电一体化设计。 设计任务 机械部分 说明该机构的工作原理、传动支撑方式、导向方式、预紧方式等;若有必要,可在提供的图中按自己认为合理的方式进行修改。 设计限位装置(如接近开关的安装支座) 控制部分 该装置由两台异步电动机驱动,其中一台电机控制工作台在90度范围内往复旋转,另一台电机控制工作台上的托辊转动,完成工件输入、停止和输出的动作。要求用继电器接触器控制系统、或、或单片机完成上述动作的控制。 提交的设计文件 设计说明书(A4)。
毕业论文设计 题目:数控机床交流伺服控制系统设计 姓名: 所在系部: 班级名称: 学号: 指导老师: 2011年12月
毕业设计(论文)任务书 设计(论文)题目:数控机床交流伺服控制系统设计 指导教师:职称:类别:毕业论文 学生:学号:设计(论文)类型:论文 专业:机电一体化班级:是否隶属科研项目:否 1、设计(论文)的主要任务及目标 毕业设计/论文是本专业教学计划中重要的、最后的一个综合性的教学环节,其主要目标是:培养和提高学生综合运用所学的专业基础知识、专业理论知识和专业基本技能来分析、解决实际问题以及动手操作的能力,使得学生对数控机床交流伺服控制系统的设计有相当的认识深度;并学会查阅专业资料,能正确阅读外文相关科技文献,对设计研究的课题进行深入分析;也使学生在思想作风、学习毅力和工作作风上受到一次良好的锻炼。通过本课题的研究,使同学们能够领会交流伺服系统的原理和伺服驱动器的应用,进一步掌握交流伺服电机的工程应用、系统设计方法和调试实现过程,为毕业后能尽快适应机电一体化专业的相关工作打下良好的基础。 2、论文的主要内容 (1)交流伺服系统现状与发展、应用介绍; (2)交流伺服系统的组成、分类、结构等; (3)交流伺服电机及交流伺服驱动器技术基本介绍、电机及伺服驱动器选型; (4)数控机床交流伺服系统设计与调试。 3、论文的基本要求 (1)完成数控系统功能设定; (2)完成交流伺服电机及伺服驱动器的选型; (3)完成数控机床交流伺服系统总体设计; (4)完成数控机床交流伺服系统电气连接图、电气回路设计; (5)完成数控机床交流伺服控制系统参数整定与调试; (6)具有运用电气控制技术、交流伺服技术、仿真技术等理论知识进行研究和系统设计(论文)的能力; (7)具有收集参考资料加以消化、归纳的能力; (8)具有调研、收集、查阅资料、分析判断确定设计/论文方案的能力; (9)具有归纳、整理技术资料,撰写技术文件的能力;
转台计算机伺服控制系统设计 飞行仿真转台为高精度的复杂控制系统, 是地面半实物仿真的关键设备, 用以模拟飞行器在空中的各种动作和姿态, 包括偏航、滚转和俯仰, 实际上是一种电信号到机械运动的转换设备。把高精度传感器如陀螺仪、导引头等安装于转台之上, 将飞行器在空中的各种姿态的电信号转化为转台的三轴机械转动, 以使陀螺仪、导引头等敏感飞机的姿态角运动。 ”高频响、超低速、宽调速、高精度”成为仿真转台的主要性能指标和发展方向。其中, ”高频响”反映转台跟踪高频信号的能力强; ”超低速”反映系统的低速平稳性好; ”宽调速”可提供很宽的调速范围; ”高精度”指系统跟踪指令信号的准确程度高。 1 转台系统介绍 图1是国产某型号三轴转台, 除外框为音叉式结构外, 内、中框均为闭合式结构, 三框可连续旋转, 驱动均采用电动机。被测陀螺安装于内框上, 其输入输出电信号经过导电环从外框底座引出。三框的物理定义是: 内框代表滚转、中框代表俯仰、外框代表偏航, 三框同时动作便能够模拟陀螺仪在三维空间的真实动作和姿态。
图1 三轴模拟转台及其示意图 系统的驱动部分为: 外框采用一个直流力矩电动机; 中框采用两个电气并联同轴连接的直流力矩电动机; 内框采用一个直流力矩电动机。这些电动机由各自的脉冲调宽放大器( PWM) 提供可控直流电源。三框各有一个测速发电机和一个感应同步器, 用以实时检测框架的旋转角速度和角位置。 不同用途的测试转台的对性能指标的要求也不同。一般转台的主要技术指标包含: 静态精度( 达到千分之几度) 、角速度范围( 从千分之几度/秒到几百度/秒) 、频率响应要求较宽, 并具有一定的负载能力要求, 且三个框架都具有最大速率的限制。 2 三轴测试转台的总体控制结构 转台三个框架的控制是相互独立的, 因此转台的控制系统能够采用如图2所示的原理方案。该系统为上下位机结构的计算机控制系统。以一台工控机作上位机, 实现对伺服系统的监控、检测和管理。上位机提供操作者的人机界面, 实现对整个转台系统的在线检测、安全保护、性能检测和系统的运动管理以及数据处理。下位
第27卷 第4期2010年12月河 北 省 科 学 院 学 报Jo urnal o f the H ebei A cademy o f Sciences V o l.27N o.4Dec.2010 收稿日期:2010-08-30 作者简介:乔建江(1974-),男,硕士,工程师,主要从事天线伺服控制系统的设计与研究. 文章编号:1001-9383(2010)04-0038-05 天气雷达天线伺服控制系统研究 乔建江 (中国电子科技集团公司第54所,河北石家庄 050081) 摘要:介绍了某天气雷达天线伺服控制系统的设计,提出了解决伺服带宽的方法:伺服系统环路设计中采 用凹口滤波器技术、串联滞后补偿网络、加速度负反馈技术和复合控制技术来抑制伺服系统结构谐振频率进而提高伺服系统带宽;采用Bang Bang 控制技术加快系统快速性,较好的解决了伺服控制系统设计中系统快速性和系统稳定性的问题;实际应用表明,该天线伺服控制系统设计方案是合理的成功的。关键词:凹口滤波器;Bang Bang 控制;复合控制;加速度负反馈中图分类号:T N820.3 文献标识码:A The research on weather radar antenna servo control system QIAO Jian jian g (T he 54th Resear ch Institud e of CET C ,Shij iaz huang H ebei 050081,China) Abstract:The desig n for one kind of w eather r adar antenna servo contr ol sy stem w as presented.And som e so lutions for the servo bandw idth are provided here:Notch filer technique,Serial lag com pensa to ry netw o rk,Acceleration Negativ e Feedback and Compound Contr ol w ere adopted in loop cir cuit de sign to restrain the m achinery reso nance of servo control system and then improv e the servo sy stem bandw idth.T he Bang Bang control w as applied here to improve the dynam ic perform ance.This kind of design solv ed the pro blems for system speediness and stability.In practical applicatio ns,this design w as also prov ed to be r easo nable and successful. Keywords:Notch filer;Bang Bang Control com pound control;Acceleratio n negative feedback 0 引言 一般的高精度天线伺服控制系统要求有定位和等速跟踪功能,定位控制精度高,响应快,等速跟踪平稳。而在我们设计的伺服控制系统中,天线的转动要求伺服控制系统快速无超调进行大角度调转、定位精度高,而且伺服系统要具有多种快速扫描方式:水平扫描、垂直扫描以及快速定位等。这些都将对伺服系统的环路设计提出更高的要求。本文主要就是对该天线伺服控制系统环路中的几个关键部分方案进行探讨和分析。 1 伺服带宽分析 伺服带宽是天线伺服控制系统中很重要的一项指标,它反映了天线跟随目标的能力。对于大型天线伺服系统来说,伺服带宽及其稳定裕度主要受天线座结构谐振频率及其阻尼系数所制约。可见,提高天线座结构谐振频率和阻尼系数就能提高伺服系统的带宽及其稳定裕度。 天线座的结构谐振频率计算公式[1]为: f L = 12 K J (1)
液压伺服系统设计 液压伺服系统设计 在液压伺服系统中采用液压伺服阀作为输入信号的转换与放大元件。液压伺服系统能以小功率的电信号输入,控制大功率的液压能(流量与压力)输出,并能获得很高的控制精度和很快的响应速度。位置控制、速度控制、力控制三类液压伺服系统一般的设计步骤如下: 1)明确设计要求:充分了解设计任务提出的工艺、结构及时系统各项性能的要求,并应详细分析负载条件。 2)拟定控制方案,画出系统原理图。 3)静态计算:确定动力元件参数,选择反馈元件及其它电气元件。 4)动态计算:确定系统的传递函数,绘制开环波德图,分析稳定性,计算动态性能指标。 5)校核精度和性能指标,选择校正方式和设计校正元件。 6)选择液压能源及相应的附属元件。 7)完成执行元件及液压能源施工设计。 本章的内容主要是依照上述设计步骤,进一步说明液压伺服系统的设计原则和介绍具体设计计算方法。由于位置控制系统是最基本和应用最广的系统,所以介绍将以阀控液压缸位置系统为主。 4.1 全面理解设计要求 4.1.1 全面了解被控对象 液压伺服控制系统是被控对象—主机的一个组成部分,它必须满足主机在工艺上和结构上对其提出的要求。例如轧钢机液压压下位置控制系统,除了应能够承受最大轧制负载,满足轧钢机轧辊辊缝调节最大行程,调节速度和控制精度等要求外,执行机构—压下液压缸在外形尺寸上还受轧钢机牌坊窗口尺寸的约束,结构上还必须保证满足更换轧辊方便等要求。要设计一个好的控制系统,必须充分重视这些问题的解决。所以设计师应全面了解被控对象的工况,并综合运用电气、机械、液压、工艺等方面的理论知识,使设计的控制系统满足被控对象的各项要求。 4.1.2 明角设计系统的性能要求 1)被控对象的物理量:位置、速度或是力。 2)静态极限:最大行程、最大速度、最大力或力矩、最大功率。 3)要求的控制精度:由给定信号、负载力、干扰信号、伺服阀及电控系统零飘、非线性环节(如摩擦力、死区等)以及传感器引起的系统误差,定位精度,分辨率以及允许的飘移量等。 4)动态特性:相对稳定性可用相位裕量和增益裕量、谐振峰值和超调量等来规定,响应的快速性可用载止频率或阶跃响应的上升时间和调整时间来规定; 5)工作环境:主机的工作温度、工作介质的冷却、振动与冲击、电气的噪声干扰以及相应的耐高温、防水防腐蚀、防振等要求; 6)特殊要求;设备重量、安全保护、工作的可靠性以及其它工艺要求。 4.1.3 负载特性分析 正确确定系统的外负载是设计控制系统的一个基本问题。它直接影响系统的组成和动力元件参数的选择,所以分析负载特性应尽量反映客观实际。液压伺服系统的负载类型有