
零点、极点和偶极子对系统性能的影响
我们知道在系统之中,适当的加入零点,极点还有偶极子,可以在某些方面提升系统的性能。但是加入某项时候,到底是如何提升的呢?为此,我们用matlab 软件来帮助我们分析,以方便我们进行比较。为了方便我们的比较,我们还将零点,极点还有偶极子对系统性能的影响分开来进行一个一个的讨论。这样我们可以更加直观的感受到他们的影响。(在分析的时候选择稳定的原始系统)
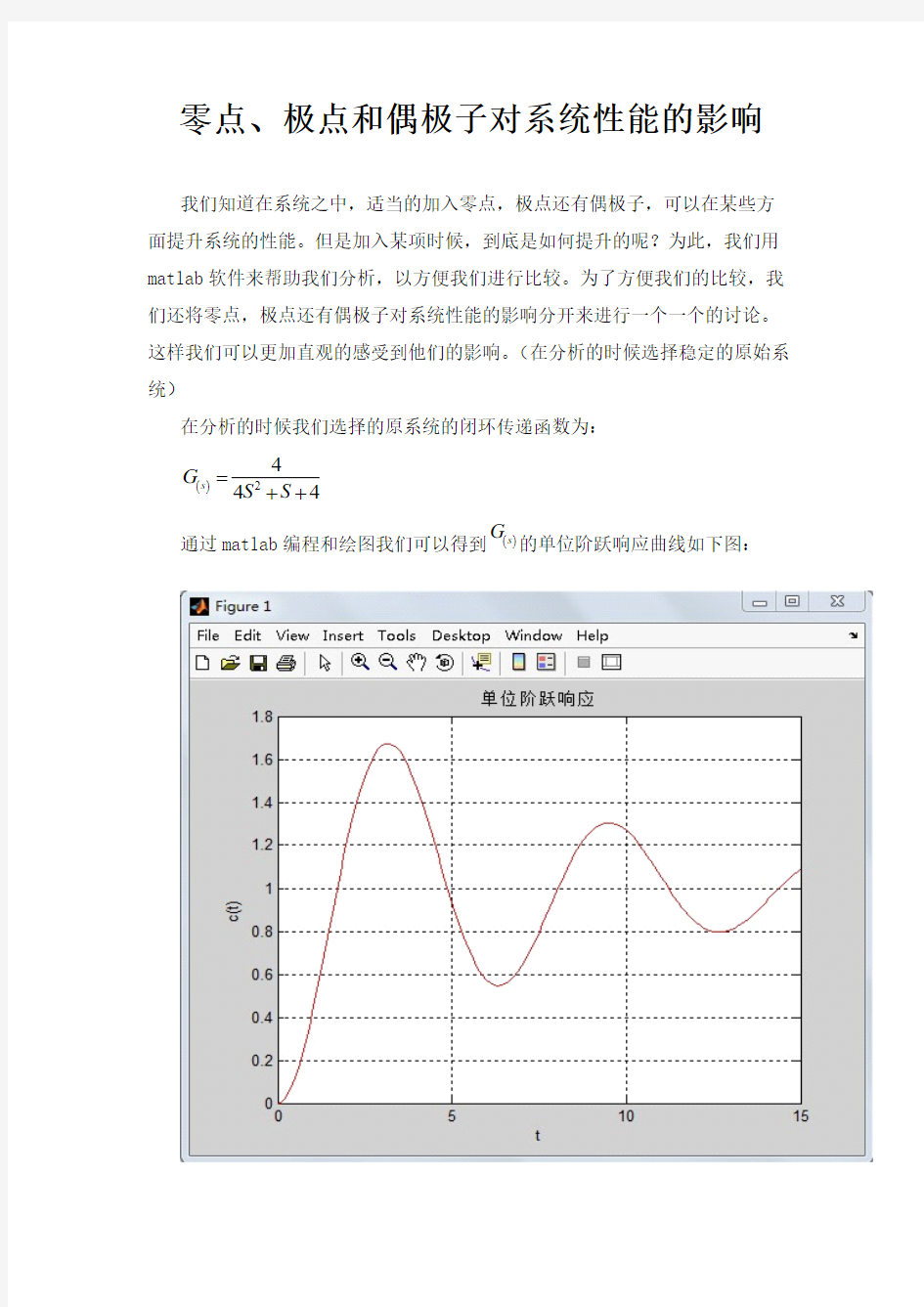
在分析的时候我们选择的原系统的闭环传递函数为:
通过matlab 编程和绘图我们可以得到()s G
的单位阶跃响应曲线如下图:
现在我们开始分析加入零点,极点和偶极子对系统性能的影响!
一、零点
为了在方程之中添加一个零点,我们将系统的闭环传递函数变为:
我们可以通过matlab 编程,绘出
()
1s G 和()s G
的响应曲线,通过分析相应的
响应曲线,我们就可以得出相应的结论!
matlab 的编程为: n=4; d=[4,1,4]; t1=0:0.1:15; y1=step(n,d,t1); n1=[3,4]; y2=step(n1,d,t1);
plot(t1,y1,'-r',t1,y2,'-g'),grid xlabel('t'),ylabel('c(t)'); title('单位阶跃响应')
两者的响应曲线为:
通过对两条响应曲线的分析我们不难得出以下的结论: (1)系统的稳定性没变,还是稳定系统; (2)系统的上升时间r t
减小; (3)系统的超调时间p
t 减小; (4)系统的超调量
%
p 变长;
(5)系统的调节时间
s t 变长;
但是在某些情况下,我们增加零点,会带来某些我们所不希望带来的结
线和原始闭环函数的响应曲线的异同点。
通过matlab绘制的响应曲线如下:
可以看出如果添加的零点正好与原点重合的时候,系统虽然最后还是稳态系统,但是系统最后的稳态值为0,这显然不合实际的要求。所以在实际应用中,我们添加不能零点的时候一定要注意,添加的零点不能原点重合。
二、极点
为了在方程之中添加一个零点,我们将系统的闭环传递函数变为:
我们可以通过matlab 编程,绘出
()
2s G 和()s G
的响应曲线,通过分析相应的
响应曲线,我们就可以得出相应的结论!
matlab 的编程为: n=4; d=[4,1,4]; t1=0:0.1:15; y1=step(n,d,t1); n1=20;
d2=[4,21,9,20]; y2=step(n1,d2,t1);
plot(t1,y1,'-r',t1,y2,'-g'),grid xlabel('t'),ylabel('c(t)'); title('单位阶跃响应')
两者的响应曲线为:
通过对两条响应曲线的分析我们不难得出以下的结论: (1)系统的稳定性没变,还是稳定系统; (2)系统的上升时间r t
变长; (3)系统的超调时间p
t 变长; (4)系统的超调量
%
p 减小;
(5)系统的调节时间
s t 减小;
通过以上分析,我们不难发现:在系统中增加零点和极点的作用是相反
的。
三、偶极子
偶极子还可以根据距离虚轴的距离分为两种情况:距离虚轴远的和距离虚轴近的。所以分两种情况进行分析。
1)在方程之中添加一对离虚轴较远的偶极子,我们将系统的闭环传递函数变为:
我们可以通过matlab 编程,绘出
()
3s G 和()s G
的响应曲线,通过分析相应的
响应曲线,我们就可以得出相应的结论!
matlab 的编程为: n=4; d=[4,1,4]; t1=0:0.1:15; y1=step(n,d,t1); n1=[4,32];
d2=[4,33.04,12.01,32.04]; y2=step(n1,d2,t1);
plot(t1,y1,'-r',t1,y2,'-g'),grid xlabel('t'),ylabel('c(t)'); title('单位阶跃响应')
两者的响应曲线为:
局部放大效果图见下图局部放大的效果图:
在添加距离远点较远的偶极子的时候,我们可以发现:添加偶极子后的系统与原来的系统一样,都是稳定的系统。并且添加偶极子以后的系统的闭环传递函数的响应曲线与原始的闭环传递函数的响应曲线几乎是重合的,差别非常小。通过局部放大以后,更是证明了我们的想法。在t=3.765s 的这一时刻,二者的差距不到0.2%,几乎是相等的。所以我们有理由认为,在添加距离虚轴较远的偶极子后的系统与对于原始系统的上升时间r t
,超调时间
p
t ,超调量
%
p ,调节时间
s t 没有影响。
2)在方程之中添加一对离虚轴较近的偶极子,我们将系统的闭环传递函数变为:
我们可以通过matlab 编程,绘出
()
3s G 和()s G
的响应曲线,通过分析相应的
响应曲线,我们就可以得出相应的结论!
matlab 的编程为: n=4; d=[4,1,4]; t1=0:0.1:15; y1=step(n,d,t1);
n1=[4,0.4];
d2=[4,1.44,4.11,0.44];
y2=step(n1,d2,t1);
plot(t1,y1,'-r',t1,y2,'-g'),grid xlabel('t'),ylabel('c(t)');
title('单位阶跃响应')
两者的响应曲线为:
在添加距离远点较近的偶极子的时候,我们可以发现:添加偶极子后的系统与原来的系统虽然都是稳定的系统。但是在添加距离虚轴较近的偶极子后的系统相对于原来的系统的系统的上升时间r t
我们可以通过放大局部图形的方法发现,两者的上升时间只是相差0.008s ,几乎没有任何差别。超调时间p
t 也可
以用相同的方法,发现也几乎是相同的。超调量%
p 减小了,调节时间
s t 增大
了。
这也说明了偶极子在位置上的区别而对系统的影响有所区别。
将所有系统的单位阶跃响应曲线画到一张图纸上可以更加清楚地看到他们
之间的关系:
用matlab编程的程序为:
n=4;d=[4,1,4];
t1=0:0.1:15;
y1=step(n,d,t1);% 原始系统
n1=[3,4];
y2=step(n1,d,t1); %加了非原点的零点的系统
n2=20;
d2=[4,21,9,20];
y3=step(n2,d2,t1); %加了原点的系统
n3=[4,32];
d3=[4,33.04,12.01,32.04];
y4=step(n3,d3,t1); %离虚轴远的偶极子
n4=[4,0.4];
d3=[4,1.44,4.11,0.44];
y5=step(n4,d3,t1); %离虚轴近的偶极子
n6=[4,0];
y6=step(n6,d,t1); %加了原点的系统
plot(t1,y1,'-r',t1,y2,'-g',t1,y3,t1,y4,'b',t1,y5,t1,y6),grid xlabel('t'),ylabel('c(t)');
title('单位阶跃响应')
所有的响应曲线之间相互对比:
局部放大效果图见下图
局部放大效果见下图局部放大效果图:
【转】关于零点和极点的讨论 2011-08-13 19:46 转载自wycswycs 最终编辑hyleon023 一、传递函数中的零点和极点的物理意义: 零点:当系统输入幅度不为零且输入频率使系统输出为零时,此输入频率值即为零点。极点:当系统输入幅度不为零且输入频率使系统输出为无穷大(系统稳定破坏,发生振荡)时,此频率值即为极点。举例:有时你家音响或电视机壳发出一阵阵尖厉嘶嘶声,此时聪明的你定会知道机壳螺丝松了,拧紧螺丝噪声问题就解决了。其实,你所做的就是极点补偿,拧紧螺丝——你大大降低了系统极点频率。当然此处系统是指机械振动系统不是电路系统,但原理一样。抛砖引玉尔,希望更多答案。(这一段有待讨论) 二、每一个极点之处,增益衰减-3db, 并移相-45度。极点之后每十倍频,增益下降20db.零点与极点相反;每一个零点之处,增益增加3db,并移相45度。零点之后,每十倍频,增益增加20db。波特图如下: 以下是极点图,零点图与极点图相反。极点零点一般用于环路的稳定性分析。 附上一个零点图
1、由于在CMOS里面一般栅端到地的电容较大,所以一般人们就去取这个极点,也就是说输入信号频率使得节点到地的阻抗无穷大(也就是所谓的1/RC)R为到地电阻,C为到地电容(并联产生极点)零点在CMOS中往往是由于信号通路上的电容产生的,即使得信号到地的阻抗为0,在密勒补偿中,不只是将主极点向里推,将次极点向外推(增大了电容),同时还产生了一个零点(与第三极点频率接近),只不过人们一般只关心前者。 2、经验上来讲,放大器电路中高阻抗的节点都要注意,即使这点上电容很小,都会产生一个很大的极点。零点一般就不那么直观了,通常如果两路out of phase的信号相交就会产生零点,但这不能解释所有的零点。 3、个人觉得零点、极点只是电路分析中抽象出来的辅助方法,可以通过零极点分析电路动作特征,然而既然有抽象肯定有它的物理表现,极点从波特图上看两个作用:延时和降低增益,在反馈系统中作用就是降低反馈信号幅度以及反馈回去的时间,所以如果某个节点存在对地电容,必然会对电容充电,同时电容和前级输出电阻还存在分压,所以这个电容会产生极点!而要保持稳定,则要看在激励情况下反馈信号会不会持续增加?而这就需要分析信号在通过电路的过程中的衰减或增加和加快或者减慢,零极点这就表征了电路的这种特性,所以可能某个节点会产生极点,也可能整个系统不同信号通路相互作用产生零极点。 俺也谈谈我的看法: 1。零/极点的产生与反馈与否似乎没有直接联系。一个电路的小信号模型中存在某一个节点,这个节点有两条通路与其
零极点对系统性能的影响分析 1任务步骤 1.分析原开环传递函数G0(s)的性能,绘制系统的阶跃响应曲线得到系 统的暂态性能(包括上升时间,超调时间,超调量,调节时间); 2.在G0(s)上增加零点,使开环传递函数为G1(s),绘制系统的根轨迹, 分析系统的稳定性; 3.取不同的开环传递函数G1(s)零点的值,绘制系统的阶跃响应曲线得 到系统的暂态性能(包括上升时间,超调时间,超调量,调节时间); 4.综合数据,分析零点对系统性能的影响 5.在G0(s)上增加极点,使开环传递函数为G2(s),绘制系统的根轨迹, 分析系统的稳定性; 6.取不同的开环传递函数G2(s)极点的值,绘制系统的阶跃响应曲线得 到系统的暂态性能(包括上升时间,超调时间,超调量,调节时间); 7.综合数据,分析极点对系统性能的影响。 8.增加一对离原点近的偶极子和一对距离原点远的偶极子来验证偶极子 对消的规律。
2原开环传递函数G0(s)的性能分析 2.1 G0(s)的根轨迹 取原开环传递函数为: Matlab指令: num=[1]; den=[1,0.8,0.15]; rlocus(num,den); 得到图形: 图1 原函数G0(s)的根轨迹 根据原函数的根轨迹可得:系统的两个极点分别是-0.5和-0.3,分离点为-0.4,零点在无限远处,系统是稳定的。 2.2 G0(s)的阶跃响应 Matlab指令: G=zpk([],[-0.3,-0.5],[1]) sys=feedback(G,1) step(sys) 得到图形:
图2 原函数的阶跃响应曲线 由阶跃响应曲线分析系统暂态性能: 曲线最大峰值为1.12,稳态值为0.87, 上升时间tr=1.97s 超调时间tp=3.15s 调节时间ts=9.95s ,2=? 超调量% p σ=28.3%
关于放大器极、零点与频率响应的初步实验 1.极零点的复杂性与必要性 一个简单单级共源差分对就包含四个极点和四个零点,如下图所示: 图1 简单单级共源全差分运放极零点及频率、相位响应示意图 上图为简单共源全差分运放的极零点以及频率响应的示意图,可以看到,运放共有四个极点,均为负实极点,共有四个零点,其中三个为负实零点,一个为正实零点。后面将要详细讨论各个极零点对运放的频率响应的影响。 正在设计中的折叠共源共栅运算放大器的整体极零点方针则包括了更多的极零点(有量级上的增长),如下图所示:
图2 folded-cascode with gain-boosting and bandgap all-poles details
图3 folded-cascode with gain-boosting and bandgap all-zeros details 从上述两张图可以看到,面对这样数量的极零点数量(各有46个),精确的计算是不可能的,只能依靠计算机仿真。但是手算可以估计几个主要极零点的大致位置,从而预期放大器的频率特性。同时从以上图中也可以看到,详细分析极零点情况也是很有必要的。可以看到46个极点中基本都为左半平面极点(负极
点)而仿真器特别标出有一个正极点(RHP )。由于一般放大器的极点均应为LHP ,于是可以预期这个右半平面极点可能是一个设计上的缺陷所在。(具体原因现在还不明,可能存在问题的方面:1。推测是主放大器的CMFB 的补偿或者频率响应不合适。 2。推测是两个辅助放大器的带宽或频率响应或补偿电容值不合适)其次可以从极零点的对应中看到存在众多的极零点对(一般是由电流镜产生),这些极零点对产生极零相消效应,减少了所需要考虑的极零点的个数。另外可以看到46个零点中45个为负零点,一个为正零点,这个正零点即是需要考虑的对放大器稳定性产生直接影响的零点。 以上只是根据仿真结果进行的一些粗略的分析,进一步的学习和研究还需要进行一系列实验。 1. 单极点传输函数——RC 低通电路 首先看一个最简单的单极点系统——RC 低通电 路,其中阻值为1k ,电容为1p ,传输函数为: sRC s H +=11)( 则预计极点p0=1/(2πRC )=1.592e8 Hz ,仿真得 到结果与此相同。 而从输出点的频率响应图中可以得到以下几个结 论: 图4 一阶RC 积分电路 1)-3dB 带宽点(截止频率)就是传输函数极点,此极点对应相位约为-45°。 2)相位响应从0°移向高频时的90°,即单极点产生+90°相移。 3)在高于极点频率时,幅度响应呈现-20dB/十倍频程的特性。 图5 一阶RC 电路极点与频率响应(R=1k C=1p )
绘制离散系统零极点图:zplane() 滤波器 绘制离散系统零极点图:zplane() zplane(Z,P) 以单位圆为基准绘制零极点图,在图中以'o'表示零点,以'x'表示极点,如果存在重零极点,则在它们的右上方显示其数目。如果零极点是用矩阵来表示,在不同行内的零极点用不同的颜 色来表示。 zplane(B, A) 输入的是传递函数模型,则函数将首先调用root 函数以求出它们的零极点。 [H1, H2, H3]=zplane(Z,P) 函数返回图形对象的句柄。其中,H1返回的是零点线的句柄;H2返回的是极点线的句柄;H3返回的是轴和单位圆线条句柄。如果有重零极点,它还包括显示在其右上方 的文本句柄。 例:设计一个数字椭圆带阻滤波器,具体要求是:通带截止频率是 wp1=1500Hz,wp2=2500Hz,阻带截止频率是ws1=1000Hz,ws2=3000Hz,在通带内的最大衰减为0.5dB,在阻带内的最小衰减 为60dB 程序设计如下: wp1=1500; wp2=2500; ws1=1000; ws2=3000; Fs=100 00Hz; rp=0.5; rs=60; wp=[wp1,wp2]; ws=[ws1,ws2]; [n,wn]=ellipord(wp/(Fs/2), ws/(Fs/2), rp, rs); [num,den]=ellip(n, rp, rs, wn, 'stop'); [H, W]=freqz(num, den); figure; plot(W*Fs/(2*pi), abs(H)); grid; xlabel('频率/Hz'); ylabel('幅值'); figure; impz(num, den); figure; grpdelay(num, den); figure; zplane(num, den); FREQZ 是计算数字滤波器的频率响应的函数
实验四连续时间系统复频域分析和离散时间系统z域分析 一.实验目的: 1.掌握连续信号拉氏变换和拉氏反变换的基本实现方法。 2.熟悉laplace函数求拉普拉斯变换,ilaplace函数求拉氏反变换 的使用。 3.掌握用ztrans函数,iztrans函数求离散时间信号z变换和逆z 变换的基本实现方法。 4.掌握用freqs函数,freqz函数由连续时间系统和离散时间系统 系统函数求频率响应。 5.掌握zplane零极点绘图函数的使用并了解使用零极点图判断系 统稳定性的原理。 二、实验原理: 1.拉氏变换和逆变换 原函数()() ?象函数 f t F s 记作:[()]() =→拉氏变换 L f t F s 1[()]() -=→拉氏反变换 L F s f t 涉及函数:laplace,ilapace. 例如:
syms t;laplace(cos(2*t)) 结果为:ans =s/(s^2+4) syms s;ilaplace(1./(s+1)) 结果为:ans = exp(-t) 2. 系统传递函数H(s)或H(z)。 12121212...()()()...m m m n n n b s b s b B s H s A s a s a s a ----+++==+++ 112112...()()()...m m m n n n b z b z b B z H z A z a z a z a --+--++++==+++ 其中,B 为分子多项式系数,A 为分母多项式系数。 涉及函数:freqz,freqs. 3. 系统零极点分布与稳定性的判定。 对于连续时间系统,系统极点位于s 域左半平面,系统稳定。 对于离散时间系统,系统极点位于z 域单位圆内部,系统稳定。 涉及函数:zplane. 三、 实验内容 1. 验证性实验 a) 系统零极点的求解和作图
增加零极点以及零极点分布对系统的影响一般说来,系统的极点决定系统的固有特性,而零点对于系统的暂态响应 和频率响应会造成很大影响。以下对于零极点的分布研究均是对于开环传递函 数。 零点一般是使得稳定性增加,但是会使调节时间变长,极点会使调节时间变短,是系统反应更快,但是也会使系统的稳定性变差。在波特图上反应为,增加一个零点会在幅频特性曲线上增加一个+20db/10倍频的曲线,幅频曲线上移,增加一个极点,会在幅频特性曲线上增加一个-20db/10倍频的曲线,幅频曲线下移。 在s左半平面增加零点时,会增加系统响应的超调量,带宽增大,能够减小系统的调节时间,增快反应速度,当零点离虚轴越近,对系统影响越大,当零点实部远大于原二阶系统阻尼系数ξ时,附加零点对系统的影响减小,所以当零点远离虚轴时,可以忽略零点对系统的影响。从波特图上来看,增加一个零点相当于增加一个+20db/10倍频的斜率,可以使的系统的相角裕度变大,增强系统的稳定性。 在s右半平面增加零点,也就是非最小相位系统,非最小相位系统的相位变化范围较大,其过大的相位滞后使得输出响应变得缓慢。因此,若控制对象是非最小相位系统,其控制效果特别是快速性一般比较差,而且校正也困难。对于非最小相位系统而言,当频率从零变化到无穷大时,相位角的便变化范围总是大于最小相位系统的相角范围,当ω等于无穷大时,其相位角不等于-(n-m)×90o。非最小相位系统存在着过大的相位滞后,影响系统的稳定性和响应的快速性。 在s左半平面增加极点时,系统超调量%pσ减小,调整时间st(s)增大,从波特图上看,s左半平面增加一个极点时,会在幅频特性曲线上增加一个-20db/10倍频的曲线,也就意味着幅频特性曲线会整体下移,导致相角域度减小,从而使得稳定性下降。当极点离原点越近,就会增大系统的过渡时间,使得调节时间增加,稳定性下降,当系统影响越大当极点实部远大于原二阶系统阻尼系数ξ时,附加极点对系统的影响减小,所以当极点远离虚轴时可以忽略极点对系统的影响。 在s右半平面增加极点会导致系统不稳定。 最小相位系统 从传递函数角度看,如果说一个环节的传递函数的极点和零点的实部全都小于或等于零,则称这个环节是最小相位环节.如果传递函数中具有正实部的零点或极点,或有延迟环节,这个环节就是非最小相位环节. 对于闭环系统,如果它的开环传递函数极点或零点的实部小于或等于零,则称它是最小相位系统.如果开环传递函中有正实部的零点或极点,或有延迟环节,则称系统是非最小相位系统.因为若把延迟环节用零点和极点的形式近似表达时(泰勒级数展开),会发现它具有正实部零点. 最小相位系统具有如下性质: 1,最小相位系统传递函数可由其对应的开环对数频率特性唯一确定;反之亦然. 2,最小相位系统的相频特性可由其对应的开环频率特性唯返航一确定;反之亦然. 3,在具有相同幅频特性的系统中,最小相位系统的相角范围最小.
实验七、系统极零点及其稳定性 三、已知下列传递函数H(s)或H(z),求其极零点,并画出极零图。 1. b=[3 -9 6]; a=[1 3 2]; zplane(b,a) 2. b=[1]; a=[1 0]; zplane(b,a)
3. b=[1 0 1]; a=[1 2 5]; zplane(b,a)
4. b=[1.8 1.2 1.2 3]; a=[1 3 2 1]; zplane(b,a) 五、求出系统的极零点,判断系统的稳定性。 5、先求出分子分母多项式系数 >> syms s >> zs=100*s*(s+2)^2*(s^2+3*s+2)^2; >> expand(zs) ans = 100*s^7+1000*s^6+4100*s^5+8800*s^4+10400*s^3+6400*s^2+1600*s >> syms s >> ps=(s+1)*(s-1)*(s^3+3*s^2+5*s+2)*((s^2+1)^2+3)^2; >> expand(ps) ans = -32-80*s-48*s^2+8*s^4-16*s^3+28*s^6+20*s^5+44*s^7+30*s^8+s^13+8*s^11+23*s^9+3*s^12 +11*s^10 再求出极零点 b=[100 1000 4100 8800 10400 6400 1600 0]; a=[1 3 8 11 23 30 44 28 20 8 -16 -48 -80 -32];
[z,p]=tf2zp(b,a) 求解结果: z = -2.0005 + 0.0005i -2.0005 - 0.0005i -1.9995 + 0.0005i -1.9995 - 0.0005i -1.0000 + 0.0000i -1.0000 - 0.0000i p = 1.0000 0.7071 + 1.2247i 0.7071 - 1.2247i 0.7071 + 1.2247i 0.7071 - 1.2247i -1.2267 + 1.4677i -1.2267 - 1.4677i -0.7071 + 1.2247i -0.7071 - 1.2247i -0.7071 + 1.2247i -0.7071 - 1.2247i -1.0000 -0.5466 极点不是都在左半平面,因此系统不稳定。 6、clear all; clc; num=conv([1 -1.414 1],[1 1]); den=conv([1 0.9 0.81],[1 -0.3]); [z,p]=tf2zp(num,den) zplane(z,p); z = -1.0000 0.7070 + 0.7072i 0.7070 - 0.7072i
零点、极点和偶极子对系统性能的影响 我们知道在系统之中,适当的加入零点,极点还有偶极子,可以在某些方面提升系统的性能。但是加入某项时候,到底是如何提升的呢?为此,我们用matlab 软件来帮助我们分析,以方便我们进行比较。为了方便我们的比较,我们还将零点,极点还有偶极子对系统性能的影响分开来进行一个一个的讨论。这样我们可以更加直观的感受到他们的影响。(在分析的时候选择稳定的原始系统) 在分析的时候我们选择的原系统的闭环传递函数为: 通过matlab 编程和绘图我们可以得到()s G 的单位阶跃响应曲线如下图:
现在我们开始分析加入零点,极点和偶极子对系统性能的影响! 一、零点 为了在方程之中添加一个零点,我们将系统的闭环传递函数变为: 我们可以通过matlab 编程,绘出 () 1s G 和()s G 的响应曲线,通过分析相应的 响应曲线,我们就可以得出相应的结论! matlab 的编程为: n=4; d=[4,1,4]; t1=0:0.1:15; y1=step(n,d,t1); n1=[3,4]; y2=step(n1,d,t1); plot(t1,y1,'-r',t1,y2,'-g'),grid xlabel('t'),ylabel('c(t)'); title('单位阶跃响应')
两者的响应曲线为: 通过对两条响应曲线的分析我们不难得出以下的结论: (1)系统的稳定性没变,还是稳定系统; (2)系统的上升时间r t 减小; (3)系统的超调时间p t 减小; (4)系统的超调量 % p 变长; (5)系统的调节时间 s t 变长;
自觉浪费了很多时间在学校里,在我那一直延续到三十多岁的求学生涯中,仅有两门课可说修正了我的思维习惯。这两门课都发生在加州理工学院。一门是CarverMead教授的模拟IC设计,课程的内容已不再重要,只记得Mead 教授的课本开首的一句话:“我每多写一个公式,就知道这本书的读者会减少一半。”整个课本讲述一个实习生去水坝工作的所见所闻。半导体的势垒当然就是那水坝,载流子的移动是他感受到的从水坝上“飘过来”的水气。整个课本几乎没有一个公式!对知识真正的理解往往可以化作一种感觉。如果您能感觉到零点和极点的移动,普通的控制理论就不再是什么深奥的学说。另一门课是Middlebrook教授的控制理论。Middlebrook和Cuk教授是开关电源控制理论的奠基者,他们的贡献后来被我的大师兄Ericsson (虽然理论上我可以这样叫他,但与他的水平实在相差太远)写在了《Fun dame ntals of Power Electro nic》,至今我仍然认为那是一本该行业最好的教科书。上Middlebrook 的课是一种享受。记得第一堂课他让大家计算一个并不复杂的电路的传递函数,大家几乎都“做对了”。 但当他指着我们延绵了三四行的算式问我们应当调整哪些参数时,大家终于明白:一个工程师所面对的未知量几乎从来都比已知量多。我们从小做的作业和试题让我们相信多数问题都可以列出和未知数一样多的方程。那门课就是教人如何抛弃不重要的量,或假设某些量可以抛弃,再验证其合理性。最后剩下极少数可以清晰控制的未知量。计算机可以代人验证,却大多不能代替人思考。 开关电源的控制理论是个十分抽象的、有时令人望而生畏的东西。系统不稳定却是个常常会遇到的问题,如何调整?为何调好的系统大批量生产时又出问题?讲理论的材料很多,大多数人还是觉得Unitrode 的那几篇最早的应用手册最有用。 这里只想讲讲俺一些不完全需要通过上半身就能感受到的东西。哈!开个玩笑。 有了感觉再看Ericsson那几百页应当不那么困难。因是讲感觉,不周密之处难免,还望谅解。 先说极点,简单的例子是一个RC滤波。对直流C是开路,对无限高频C是短路,所以波特图的幅值在极点前是平的,极点后开始以-20dB/dec 下降。俺对极点的感觉就是一个男人。男人通常开始热情高涨,但多半经不起时间的考验。无论是对爱情,还是日渐稀松的头发,男人大抵都是如此。
现代工程控制理论实验报告学生:任课老师: 学号:班级:
实验三:传递函数零极点对系统性能的影响 一、实验容及目的 实验容: 通过增加、减少和改变高阶线性系统 21.05 (s+s+1)(0.5s+1)(0.125s+1) 的零极点,分析系统品质的变化,从中推导出零极点和系统各项品质之间的关系,进而总结出高阶线性系统的频率特性。 实验目的: (1)通过实验研究零极点对系统品质的影响,寻找高阶线性系统的降阶方法,总结高阶系统的时域特性。 (2)练习使用MATLAB语言的绘图功能,提高科技论文写作能力,培养自主学习意识。 二、实验方案及步骤 首先建立MATLAB脚本文件,使其能够绘出在阶跃输入下特征多项式能够变化的高阶线性系统的响应曲线。之后在以下六种情况下绘出响应曲线,分别分析其对系统输出的影响。 (1)改变主导极点,增减、改变非主导极点,加入非负极点,绘出多组线性系统在阶跃信号下的响应曲线。 (2)在不引入对偶奇子的前提下,加入非负极点,绘出多组线性系统在阶跃信号下的响应曲线。
(3)引入对偶奇子,绘出多组线性系统在阶跃信号下的响应曲线。 (4)探究系统稳定条件下单调曲线、振荡曲线的形成与零极点之间的关系。 三、实验结果分析 1、研究极点对系统品质的影响 (1)改变主导极点,得到的输出曲线如下: 将系统品质以表格方式列于下方。
从两图片中不难发现,在极点都是负数的条件下,当主导极点出现较小变动时,整条输出曲线会出现很大的变化。 从表格中可以发现当主导极点由负半轴向原点靠近时,超调量、稳定时间逐渐增大,而且这两项指标的变化速率随着主导极点离原点的距离减小而增大。衰减率则出现轻微的先增大后减小的趋势,猜测在主导极点由负半轴向原点靠近的过程中,衰减率存在极值。 将两幅图片中发现的规律总结如下: (1)主导极点对系统品质有很大影响。 (2)在极点都小于零的条件下,主导极点的代数值越小,系统的准确性越好、快速性也越好。 (2)增减、改变非主导极点,得到的输出曲线如下:
请问电路中极点与零点的产生与影响 一、电路中经常要对零极点进行补偿,想问,零点是由于前馈产生的吗? 它产生后会对电路造成什么样的影响?是说如果在该频率下,信号通过 这两条之路后可以互相抵消还是什么?? 极点又是怎么产生的呢?是由于反馈吗?那极点对电路的影响又是什么? 产生振荡还是什么?? 请大家指教一下。 1.(不能这么简单的理解 其实电路的每个node都有一个极点 只是大部分的极点相对与所关心的频率范围太大而忽略了 运放中我们一般关心开环的0dB带宽那么>10*带宽频率的极点我们就不管了 因为它们对相位裕度贡献太小而被忽略; 只要输入和输出之间有两条通路就会产生一个零点: 同样的高于所关心频率范围的零点也不用管 一个在所关心频率范围内的零点需要看是左半平面还是右半平面的 左半平面的零点有利于环路稳定右半平面的则不利 具体的看拉扎维的书吧写的还是蛮详细的看不懂就多看几遍 自己做个电路仿下) 2.好问题,希望彻底了解的人仔细解答。我也同样疑惑。
但是我总觉得极点,零点并不能单单的说是由于前馈,反馈,或者串联并联一个电容产生的。 产生的原因还是和具体的电路结构相关联的。 比如一个H(s)的系统和一个电容并联或串联在输入输出之间,谁能说他一定产生一个极点或零点呢?这因该和H(s)的具体形式有关。 大多书上说的应该大多针对的是运放结构,它的结构具有特殊性。具有以点盖全的嫌疑。 还请达人细说。 3.一般的说,零点用于增强增益(幅度及相位),极点用于减少增益(幅度及相位),电路中一般零点极点是电容倒数的函数(如1/C)。 当C变大时,比如对极点来说,会向原点方向变化,造成增益减少加快(幅度及相位)~一般运放电路的米勒效应电容就是这个原理,当增益迅速下降倒-3dB时,其他的零点极点都还没对系统增益起到啥作用(或作用很小,忽略了),电路就算七窍通了六窍半了~你就可以根据自己的需要补上带宽,多少多大的裕度就KO了 极点是由于结点和地之间有寄生电容造成的,零点是由于输入和输出之间有寄生电容造成的,一般输入和输出之间的零极点考虑多一点,主要是因为输入输出有较大的电阻,造成了极点偏向原点. 4.个人的一点理解 极点决定的是系统的自然响应频率,通常在电路中就是对地电容所看进去的R和对地电容C共同决定的。 零点是由于在输入输出间存在两条信号路径,两个信号路径强度相消即可,通常在电路中表现为反馈或前馈通路。 5.一个电路中有多少个极点和多少个零点取决你的器件模型,
在复平面(s=σ+jω)上,使传递函数G(s)→∞的点,称为G(s)的极点;使G(s)=0的点,称为G(s)的零点。零点或极点为复数时,为复零点或复极点。实零点或实极点为实数,位于实轴(α轴)上。位于s右半平面(RHP-Right Half Plane)的正零点或正极点,称为RHP零点或RHP极点;位于s左半平面(LHP-Left Half Plane)的负零点或负极点,称为LHP零点或LHP极点。只要含有一个RI-IP极点,系统就是不稳定的;系统的全部极点都是LHP极点时,系统才是稳定的。极点和零点为虚数时,位于虚轴(J 轴)上;有虚极点的系统属于不稳定系统。 一阶系统的几种零、极点特性的比较见表 表一阶系统的几种零、极点特性的比较 以图1所示的二阶滤波电路为例来分析二阶系统的零、极点特性。其传递函数也可以写成 图1 二阶低通滤波器电路 它有两个LHP极点:-1/T1,和-1/T2。 图2所示为举例给出的某个Buck-Boost转换器控制一输出传递函数的零、极点分布。它有两个LHP极点(pole)P1、P2,P1,2=(-1,1±j2,2)×103,还有一个RHP零点(zero)Z,z=+6.1×103,Bode图上,相位总滞后为270°。 开关转换器的传递函数中,有时出现所谓ESR零点,它是指由于滤波电容有等效串联电阻(ESR),使传递函数包含一个ESR零点。例如式(13-9)所示二阶低通输出滤波器,设电
图2 Buck Boost转换器的零、极点分布 容C的ESR为Rc,则其传递函数为 G(s)有一个LHP零点:z=-1/RcC,称为滤波电容的ESR零点。(本文转自家居建材网:https://www.doczj.com/doc/3214733606.html,)
现代工程控制理论实验报告 学生姓名:任课老师: 学号:班级:
实验三:传递函数零极点对系统性能的影响 一、实验内容及目的 实验内容: 通过增加、减少和改变高阶线性系统 21.05 (s+s+1)(0.5s+1)(0.125s+1) 的零极点,分析系统品质的变化,从中推导出零极点和系统各项品质之间的关系,进而总结出高阶线性系统的频率特性。 实验目的: (1)通过实验研究零极点对系统品质的影响,寻找高阶线性系统的降阶方法,总结高阶系统的时域特性。 (2)练习使用MATLAB语言的绘图功能,提高科技论文写作能力,培养自主学习意识。 二、实验方案及步骤 首先建立MATLAB脚本文件,使其能够绘出在阶跃输入下特征多项式能够变化的高阶线性系统的响应曲线。之后在以下六种情况下绘出响应曲线,分别分析其对系统输出的影响。 (1)改变主导极点,增减、改变非主导极点,加入非负极点,绘出多组线性系统在阶跃信号下的响应曲线。 (2)在不引入对偶奇子的前提下,加入非负极点,绘出多组线性系统在阶跃信号下的响应曲线。 (3)引入对偶奇子,绘出多组线性系统在阶跃信号下的响应曲
线。 (4)探究系统稳定条件下单调曲线、振荡曲线的形成与零极点之间的关系。 三、实验结果分析 1、研究极点对系统品质的影响 (1)改变主导极点,得到的输出曲线如下: 将系统品质以表格方式列于下方。
从两张图片中不难发现,在极点都是负数的条件下,当主导极点出现较小变动时,整条输出曲线会出现很大的变化。 从表格中可以发现当主导极点由负半轴向原点靠近时,超调量、稳定时间逐渐增大,而且这两项指标的变化速率随着主导极点离原点的距离减小而增大。衰减率则出现轻微的先增大后减小的趋势,猜测在主导极点由负半轴向原点靠近的过程中,衰减率存在极值。 将两幅图片中发现的规律总结如下: (1)主导极点对系统品质有很大影响。 (2)在极点都小于零的条件下,主导极点的代数值越小,系统的准确性越好、快速性也越好。 (2)增减、改变非主导极点,得到的输出曲线如下:
关于零点和极点的讨论 一、传递函数中的零点和极点的物理意义:零点:当系统输入幅度不为零且输入频率使系统输出为零时,此输入频率值即为零点。极点:当系统输入幅度不为零且输入频率使系统输出为无穷大(系统稳定破坏,发生振荡)时,此频率值即为极点。举例:有时你家音响或电视机壳发出一阵阵尖厉嘶嘶声,此时聪明的你定会知道机壳螺丝松了,拧紧螺丝噪声问题就解决了。其实,你所做的就是极点补偿,拧紧螺丝——你大大降低了系统极点频率。当然此处系统是指机械振动系统不是电路系统,但系统原理一样。抛砖引玉尔。希望更多答案。(这一段有待讨论) 二、,每一个极点之处,增益衰减-3db, 并移相-45度。极点之后每十倍频,增益下降20db.零点与极点相反,在零点之处,增益增加3db,并移相45度。零点之后,每十倍频,增益增加20db.波德图如下: 零点图找不到合适的,不过是与极点图相反的。以下是极点图。极点零点一般用于环路的稳定性分析 附上一个零点的图,并附上一点心得
1.由于在CMOS里面一般栅端到地的电容较大,所以一般人们就去取这个极点,也就是说 输入信号频率使得节点到地的阻抗无穷大(也就是所谓的1/RC)R为到的电阻,C为到地的电容(并联产生极点) 零点在CMOS中往往是由于信号通路上的电容产生的,即使的信号到地的阻抗为0, 在密勒补偿中,不只是将主极点向里推,将次极点向外推(增大了电容),同时还产生了一个零点(与第三极点频率接近), 只不过人们一般只关心前者。 2.经验上来讲,放大器电路中高阻抗的节点都要注意,即使这点上电容很小,都会产生一个很大的极点。零点一般就不那么直观了,通常如果两路out of phase的信号相交就会产生零点,但这不能解释所有的零点。 3.个人觉得零点、极点只是电路分析中抽象出来的辅助方法,可以通过零极点分析电路动作
不可少的,因为没有ESR 的LC 滤波器相位滞后大。 6.4.12. Ⅲ型误差放大器电路、传递函数和零点、极点位置 具有图6.41(b)的幅频特性电路如图6.42所示。可以用第6.4.6节Ⅱ 型误差放大器的方法推导它的传递函数。反馈和输入臂阻抗用复变量s 表示,并且传递函数简化为)(/)()(12s Z s Z s G =。传递函数经代数处理得到 )] /((1)[1)((])(1)[1()()()(212123321133112C C C C sR C sR C C sR C R R s C sR s U s U s G in o +++++++== (6-69) 可以看到,此传递函数具有 (a ) 一个原极点,频率为 ) (212110C C R f p +=π (6-70) 在此频率R 1的阻抗与电容(C 1+C 2)的阻抗相等且与其并联。 (b ) 第一个零点,在频率 1 2121C R f z π= (6-71) 在此频率,R 2的阻抗与电容C 1的阻抗相等。 (c ) 第二个零点,在频率 31331221)(21C R C R R f z ππ≈+= (6-72) 在此频率,R 1+R 3的阻抗与电容C 3的阻抗相等。 (d ) 第一个极点,在频率 2 221212121)]/([21C R C C C C R f p ππ≈+= (6-73) 在此频率,R 2的阻抗与电容C 2和C 1串联的阻抗相等。 (e ) 第二个极点,在频率 33221C R f p π= (6-74) 在此频率R 3的阻抗与电容C 3阻抗相等。 为画出图6.41(b)的幅频特性,以f z 1=f z 2,f p 1=f p 2选择RC 乘积。双零点和双极点频率的位置由k 来决定。根据k 获得希望的相位裕度。图6.41(b)中误差放大器在希望的f c 0处以斜率+20dB/dec 处的增益(图6.41(a))令其等于LC 滤波器的衰减量,但符号相反。 从表6.3和传递函数式(6-69),可以设置希望的零点和极点频率,设计例子如下。 6.13. 设计举例-具有3型反馈环路的正激变换器稳定性 设计一个正激变换器反馈环路,正激变换器具有如下的参数: U 0=5.0V; I o =10A; I o min =1.0A; 开关频率f s =50kHz; 输出纹波(p-p )<20mV 。并假定输出电容按广告说的没有ESR 。 首先,计算输出LC 滤波器和它的转折频率。在6.4.9节中得到 66 103010 1020533--?=???==o o o I T V L H 假定输出电容的ESR 为零,所以由于ESR 的纹波也为零,但有小的电容纹波分量。通常很小,因此所用的电容比2型误差放大器例子中应用的2600μF 要小得多。但保守些本设计电容仍采用2600μF ,且其ESR 为零,于是 570102600103021216 6=???==--ππo o c C L f Hz C 2 o 图6.42 具有式(22)的Ⅲ型误差放大器
请问电路中极点与零点的产生与影响 电路中经常要对零极点进行补偿,想问,零点是由于前馈产生的吗? 它产生后会对电路造成什么样的影响?是说如果在该频率下,信号通过 这两条之路后可以互相抵消还是什么?? 极点又是怎么产生的呢?是由于反馈吗?那极点对电路的影响又是什么? 产生振荡还是什么?? 请大家指教一下。 (不能这么简单的理解 其实电路的每个node都有一个极点 只是大部分的极点相对与所关心的频率范围太大而忽略了 运放中我们一般关心开环的0dB带宽那么>10*带宽频率的极点我们就不管了 因为它们对相位裕度贡献太小而被忽略; 只要输入和输出之间有两条通路就会产生一个零点: 同样的高于所关心频率范围的零点也不用管 一个在所关心频率范围内的零点需要看是左半平面还是右半平面的 左半平面的零点有利于环路稳定右半平面的则不利 具体的看拉扎维的书吧写的还是蛮详细的看不懂就多看几遍 自己做个电路仿下) 好问题,希望彻底了解的人仔细解答。我也同样疑惑。 但是我总觉得极点,零点并不能单单的说是由于前馈,反馈,或者串联并联一个电容产生的。产生的原因还是和具体的电路结构相关联的。 比如一个H(s)的系统和一个电容并联或串联在输入输出之间,谁能说他一定产生一个极点或零点呢?这因该和H(s)的具体形式有关。 3大书上说的应该大多针对的是运放结构,它的结构具有特殊性。具有以点盖全的嫌疑。 还请达人细说。 一般的说,零点用于增强增益(幅度及相位),极点用于减少增益(幅度及相位),电路中一般零点极点是电容倒数的函数(如1/C)。 当C变大时,比如对极点来说,会向原点方向变化,造成增益减少加快(幅度及相位)~一般运放电路的米勒效应电容就时这个原理,当增益迅速下降倒-3dB时,其他的零点极点都还没对系统增益起到啥作用(或作用很小,忽略了),电路就算七窍通了六窍半了~你就可以根据自己的需要补上带宽,多少多大的裕度就KO了 极点是由于结点和地之间有寄生电容造成的,零点是由于输入和输出之间有寄生电容造成的,一般输入和输出之间的零极点考虑多一点,主要是因为输入输出有较大的电阻,造成了极点偏向原点. 个人的一点理解 极点决定的是系统的自然响应频率,通常在电路中就是对地电容所看进去的R和对地电容C共同决定的。 零点是由于在输入输出间存在两条信号路径,两个信号路径强度相消即可,通常在电路中表现为反馈或前馈通路。 一个电路中有多少个极点和多少个零点取决你的器件模型, 因为一般人们只观点几个低频极点(最多到3吧),所以将高频极点忽略了,