
自动控制原理实验报告
课程编号: ME3121023
专业自动化
班级
姓名
学号
实验时间: 2014年12月
一、实验目的和要求:
通过自动控制原理实验牢固地掌握《自动控制原理》课的基本分析方法和实验测试手段。能应用运算放大器建立各种控制系统的数学模型,掌握系统校正的常用方法,掌握系统性能指标同系统结构和参数之间的基本关系。通过大量实验,提高动手、动脑、理论结合实际的能力,提高从事数据采集与调试的能力,为构建系统打下坚实的基础。
二、实验仪器、设备(软、硬件)及仪器使用说明
自动控制实验系统一套
计算机(已安装虚拟测量软件---LABACT)一台
椎体连接线18根
实验一线性典型环节实验
(一)、实验目的:
1、了解相似性原理的基本概念。
2、掌握用运算放大器构成各种常用的典型环节的方法。
3、掌握各类典型环节的输入和输出时域关系及相应传递函数的表达形式,熟悉各典型环
节的参数(K、T)。
4、学会时域法测量典型环节参数的方法。
(二)、实验内容:
1、用运算放大器构成比例环节、惯性环节、积分环节、比例积分环节、比例微分环节和
比例积分微分环节。
2、在阶跃输入信号作用下,记录各环节的输出波形,写出输入输出之间的时域数学关系。
3、在运算放大器上实现各环节的参数变化。
(三)、实验要求:
1、仔细阅读自动控制实验装置布局图和计算机虚拟测量软件的使用说明书。
2、做好预习,根据实验内容中的原理图及相应参数,写出其传递函数的表达式,并计算
各典型环节的时域输出响应和相应参数(K、T)。
3、分别画出各典型环节的理论波形。
5、输入阶跃信号,测量各典型环节的输入和输出波形及相关参数。
(四)、实验原理:
实验原理及实验设计:
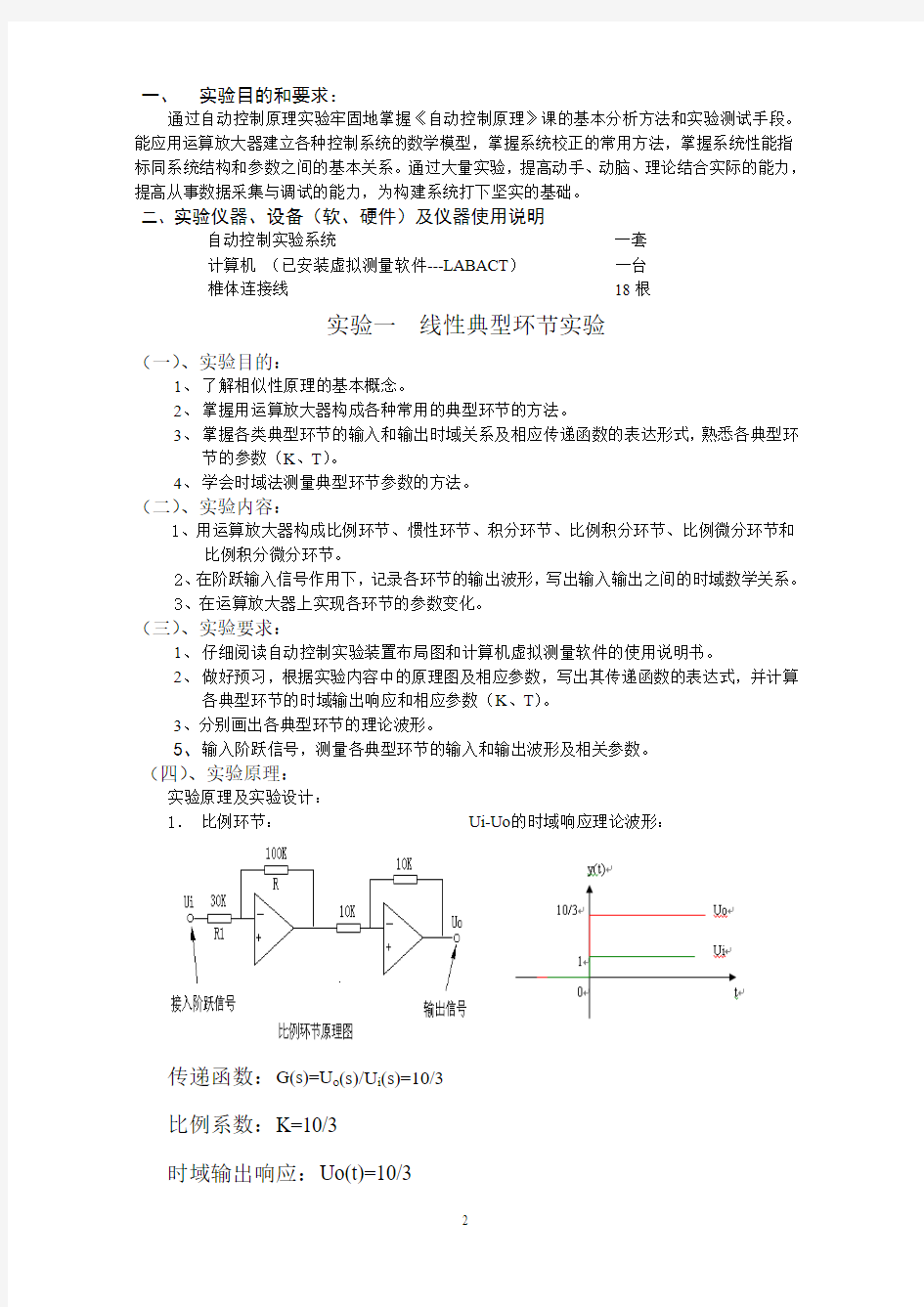
1.比例环节:Ui-Uo的时域响应理论波形:
传递函数:G(s)=U o(s)/U i(s)=10/3
比例系数:K=10/3
时域输出响应:Uo(t)=10/3
2.惯性环节:Ui-Uo的时域响应理论波形:
传递函数:G(s)=U o(s)/U i(s)=1/(0.1s+1)
比例系数:k=1
时常数:T=RC=0.1
时域输出响应:U o(t)=(1-错误!未找到引用源。
3.积分环节:Ui-Uo的时域响应理论波形:
传递函数:G(s)=U o(s)/U i(s)=1/0.1s
时常数:T=0.1
时域输出响应:U o(t)=10t
4.比例积分环节:Ui-Uo的时域响应理论波形:
传递函数:G(s)=U o (s)/U i (s)=s
s 10
+ 比例系数:k=5 时常数:T=1/k=0.2
时域输出响应:U o (t)=(1+10t)错误!未找到引用源。
5.比例微分环节: Ui-Uo 的时域响应理论波形:
传递函数:G(s)=U o (s)/U i (s)= 1.62s+28.8 比例系数:k=3.6 时常数:T=0.05
时域输出响应:U o (t)= 28.8+1.62δ(t)
6.比例积分微分环节: Ui-Uo 的时域响应理论波形:
传递函数:G(s)=U o (s)/U i (s)= s
s s 90
91.02++
比例系数:k=2
时常数:T=0.01
时域输出响应:U0(t)=(90t+9)错误!未找到引用源。+0.1)(t
δ(五)、实验方法与步骤
1、根据原理图构造实验电路。
2、测量输入和输出波形图。
3、将所测得的数据填入实验数据表中。
(六)、讨论与思考
1、写出各典型环节的微分方程(建立数学模型)。
比例环节:
()() y t Kr t
=
惯性环节:
()
()() dy t
T y t Kr t dt
+=
积分环节: y(t)=k错误!未找到引用源。
2、根据所描述的各典型环节的微分方程,你能否用电学、力学、热力学和机械学等学科
中的知识设计出相应的系统?请举例说明,并画出原理图。
机械位移系统,物体在外力F(t)作用下产生位移y(t),
写出运动方程.
m错误!未找到引用源。+f错误!未找到引用
源。+ky(t)=F(t)
3、利用MATLAB仿真,与实验中实测数据和波形相比较,分析其误差及产生的原因。
原因:实验箱中电阻值和电容值得与标准值存在误差、外界电磁的干扰和信息传输时间的延迟滞后,都使得理论值与实测数据与波形存在误差。
比例环节
惯性环节
积分环节
比例积分
比例微分
比例积分微分
实验二二阶系统的性能研究
(一)、实验目的:
通过实验加深理解二阶系统的性能指标同系统参数的关系。
(二)、实验内容:
1、二阶系统的时域动态性能研究;
(三)、实验要求:
1、做好预习,根据实验原理图所示相应参数,写出系统的开环,闭环传递函数。计算ξ、
ωn、t r、t s、t p、σ%、等理论值,并绘制单位阶跃信号下的输出响应理论波形。
2、自己设计实验参数。
(四)、实验原理:
实验原理及实验设计:
预习内容:(1) 二阶系统时域实验参数计算:
传递函数:G(s)=U o(s)/U i(s)=错误!未找到引用源。/(0.1R错误!未找到引用源。+RS+错误!未找到引用源。)错误!未找到引用源。
超调量错误!未找到引用源。
上升时间 tr=错误!未找到引用源。或tr=错误!未找到引用源。
峰值时间 tp=错误!未找到引用源。
调整时间 ts=错误!未找到引用源。
(五)、实验方法与步骤
1、根据原理图构造实验电路。
2、测量时域响应波形和数据。
3、将所测得的数据填入实验数据表中。
1、R=70k时
上升时间
调节时间
2、R=40k时上升时间
调节时间
3、R=20k时
超调量+峰值时间
上升时间
调整时间
4、R=10k时超调量
上升时间
峰值时间
调整时间
5、R=5k时
超调量+峰值时间
上升时间
调节时间
(八)、思考题:
1、在本实验中,系统能否出现不稳定的情况,此时电阻值R的取值范围?
答:此次实验中不可能出现不稳定的情况,因为闭环传递函数的极点一直在s 左半平面,满足劳斯判据。
2、在系统不稳定的情况,你能否通过改变其它元器件参数,使系统变得稳定?改哪些参
数?如何改?请分别列出,并加以分析。
答:增加比例微分控制环节和速度反馈控制环节,减少原系统的震荡性和参数的改变。
3、利用MATLAB仿真,与实验中实测数据和波形相比较,分析其误差及产生的原因。
答:matlab仿真得到的数据与实测数据与波形相比较大致相同,但是存在误差;可能是因为实验中电子线路元件的值有误差。,仪器的不精确,以及人为读数选点上的一点误差。
实验三 系统时域分析实验
(一)、实验目的:
1、 深入掌握二阶系统的性能指标同系统闭环极点位置的关系。
2、 掌握高阶系统性能指标的估算方法及开环零、极点同闭环零、极点的关系。
3、能运用根轨迹分析法由开环零极点的位置确定闭环零极点的位置。
(二)、实验内容:
1、运用根轨迹法对控制系统进行分析;明确闭环零、极点的分布和系统阶跃响应的定性关系。
(三)、实验要求:
1、做好预习,根据原理图所示相应参数,计算理论值并绘制根轨图,用试探法确定主导
极点的大致位置。
2、用Routh 稳定判据,求出系统稳定、临界稳定和不稳定时的K 值范围和R 的取值。
3、画出输入输出的理论波形(单位阶跃信号作用下)。
(四)、实验原理:
1、根轨迹:当K 由0→∞变化时,闭环特征根在S 平面上移动的轨迹城根轨迹,不仅直观的表示了K 变化时间闭环特征根的变化,还给出了参数时闭环特征根在S 平面上分布的影响。可判定系统的稳定性,确定系统的品质。
稳定性:根轨迹若越过虚轴进入s 右半平面,与虚轴交点的k 即为临界增益。
稳态性能:根据坐标原点的根数,确定系统的型别,同时可以确定对应的静态误差系数。
预习内容:(1) 三阶系统时域实验参数计算和根轨迹图:
7
10()(2)(10)
G S RS S S =++
选取R=340K 的根轨迹图
(五)、实验方法与步骤
1、根据原理图构造实验电路。
2、测量时域响应波形和相应参数。
3、将所测得的数据填入实验数据表中。
(七)、记录实验实测波形:
计组实验十 老师:包健 一、源代码测试模块代码: module Top( inputinclk, inputmem_clk, inputrst, outputreg[7:0] LED, input [3:0] SW ); wireclk; MyButtonmb( .clk_100MHz(mem_clk), .BTN(inclk), .BTN_Out(clk) ); wire [31:0] ALU_F; wire [31:0] M_R_Data; wire ZF; wire OF; wire [31:0]PC; My_I_CPUmy_i_cpu( .clk(clk), .mem_clk(mem_clk), .rst(rst), .ALU_F(ALU_F), .M_R_Data(M_R_Data), .ZFF(ZF), .OF(OF), .PC_out(PC) ); always@(*) begin case(SW) 4'd0:LED=ALU_F[7:0]; 4'd1:LED=ALU_F[15:8]; 4'd2:LED=ALU_F[23:16]; 4'd3:LED=ALU_F[31:24]; 4'd4:LED=M_R_Data[7:0];
4'd5:LED=M_R_Data[15:8]; 4'd6:LED=M_R_Data[23:16]; 4'd7:LED=M_R_Data[31:24]; 4'd8:LED={ZF,6'd0,OF}; 4'd12:LED=PC[7:0]; 4'd13:LED=PC[15:8]; 4'd14:LED=PC[23:16]; 4'd15:LED=PC[31:24]; default:LED=8'b0000_0000; endcase end endmodule 顶层模块代码: moduleMy_I_CPU( inputclk, inputmem_clk, inputrst, output [31:0] ALU_F, output [31:0] M_R_Data, output ZFF, output OF, output [31:0]PC_out ); //wire clk_n = ~clk; wire[31:0] codes; wire [31:0]PC_new; reg [31:0]PC; Inst_Fetch1 inst_fetch( .PC(PC), .rst(rst), .clk(clk), .Inst_codes(codes), .PC_new(PC_new) ); wire[5:0] OP; wire[5:0] func;
《自动控制原理》 实验报告 姓名: 学号: 专业: 班级: 时段: 成绩: 工学院自动化系
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、实验原理 1.比例环节的传递函数为 K R K R R R Z Z s G 200,1002)(211 212==-=-=- = 其对应的模拟电路及SIMULINK 图形如图1-3所示。 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G ; ② 惯性环节11)(1+= s s G 和1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节s s G =)(1 ⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G ⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+= 四、实验结果及分析 图1-3 比例环节的模拟电路及SIMULINK 图形
① 仿真模型及波形图1)(1=s G 和2)(1=s G ② 仿真模型及波形图11)(1+= s s G 和1 5.01)(2+=s s G 11)(1+= s s G 1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节
A . 阶跃 函数 斜坡函数 抛物线函数 脉冲函数 正弦函数 B.典型环节的传递函数 比例环节 惯性环节(非周期环节 ) 积分环节 微分环节 二阶振荡环节(二阶惯性环节) 延迟环节 C.环节间的连接 串联 并联 反馈开环传递函数= 前向通道传递函数= 负反馈闭环传递函数 正反馈闭环传递函数 D.梅逊增益公式 E.劳斯判据 劳斯表中第一列所有元素均大于零 s n a 0a 2a 4a 6…… s n-1a 1a 3a 5a 7…… s n-2b 1b 2b 3b 4…… s n-3c 1c 2c 3c 4…… ……… s 2f 1f 2 s 1g 1 s 0h 1 劳斯表中某一行的第一个元素为零而该行其它元素不为零,ε→0; 劳斯表中某一行的元素全为零。P(s)=2s 4+6s 2-8。 F.赫尔维茨判据 特征方程式的所有系数均大于零。 G. 误差传递函数 扰动信号的误差传递函数 I.二阶系统的时域响应: 其闭环传递函数为 或 系统的特征方程为0 2)(22=++=n n s s s D ωζω 特征根为1 ,221`-±-=ζωζωn n s 上升时间t r 其中 峰值时间t p 最大超调量M p 调整时间t s a.误差带范围为±5% b.误差带范围为±2% 振荡次数N J.频率特性: 还可表示为:G (jω)=p (ω)+jθ(ω) p (ω)——为G (jω)的实部,称为实频特性; θ(ω)——为G (jω)的虚部,称为虚频特性。 显然有: K.典型环节频率特性: 1.积分环节 ???? ???? ? =+===)()()()()()()(sin )()()(cos )()(2 2ωωθω?ωθωωω?ωωθω?ωωp arctg p A A A p s s G 1(=???≥<=000)(t A t t r K s R s C s G ==)()()(222 2)(n n n s s K s G ωζωω++=)()(1)()() ()(s H s G s G s R s C s -= =Φ22 22)() (n n n s s s R s C ωζωω++=1 21)()(22++= Ts s T s R s C ζ2 1ζωβ πωβπ--=-= n d r t n s t ζω3 =
科目:微机原理与系统设计授课老师:李明、何学辉 学院:电子工程学院 专业:电子信息工程 学生姓名: 学号:
微机原理硬件设计综合作业 基于8086最小方式系统总线完成电路设计及编程: 1、扩展16K字节的ROM存储器,起始地址为:0x10000; Intel 2764的存储容量为8KB,因此用两片Intel 2764构成连续的RAM存储区域的总容量为2 8KB=16KB=04000H,鉴于起始地址为10000H,故最高地址为 10000H+04000H-1=13FFFH 电路如图
2、扩展16K 字节的RAM 存储器,起始地址为:0xF0000; Intel 6264的存储容量为8KB ,因此用两片Intel 6264构成连续的RAM 存储区域的总容量为2 8KB=16KB=04000H ,鉴于起始地址为F0000H ,故最高地址为 F0000H+04000H-1=F3FFFH 片内地址总线有13根,接地址总线的131~A A ,0A 和BHE 用于区分奇偶片,用74LS155作译码电路,如图所示 3、设计一片8259中断控制器,端口地址分别为:0x300,0x302; 鉴于端口地址分别是300H 和302H ,可将82590A 接到80861A ,其他作译码。电路如图:
4、设计一片8253定时控制器,端口地址分别为:0x320,0x322,x324,0x326; 根据端口地址可知,825301,A A 应该分别接到8086的12,A A ,其余参与译码。电路如图:
5、设计一片8255并行接口,端口地址分别为:0x221,0x223,x225,0x227; 由于端口地址为奇地址,8086数据总线应该接158~D D ,且BHE 参与译码。根据端口地址可得825501,A A 应该分别接到8086的12,A A ,其余参与译码。电路如图:
计算机组成原理实验报告 实验1:VERILOG 设计基础 专业班级:14级计算机二班 学号:14048001 姓名:杨娜 学号:14048003 姓名:周蓉 实验地点:理工楼901 实验时间:2016年5月14日
实验十VGA显示控制器的设计 一、实验目的 1、学习VERILOG的基本语法和编程规则 2、掌握通用寄存器等常用基本数字模块的VERILOG描述和基本设计方法 3、理解带使能控制和异步清零的8位寄存器的设计原理 4、掌握使用VERILOG设计和验证带使能控制和异步清零的8位寄存器的方法 5、掌握移位寄存器的设计方法 二、实验任务 1、设计一个带使能控制和异步清零的8位寄存器REG8X,实现8位输入的锁存,在时钟的上升沿处得到一个8位的输出和一个8位的反向输出,将结果显示在发光二极管。 模块的端口描述如下: 模块的参考物理结构如下: R7 R6 R i R 0 7 6 i 0 带使能控制和异步清零的8位寄存器 模块的使用注意事项
1.数据源D(7..0)一直加在寄存器的数据输入端; 2.周期性的时钟信号Clock一直加在寄存器的时钟输入端 3.使能信号Enable控制寄存器是否接受数据。当Enable = '0'时,寄存器不 接受数据,保持原来的状态不变;当Enable = '1'时,在时钟信号Clock正 跳变时,寄存器接受并保存当时D(7..0)的数据; 4.本寄存器其它方面的功能与上述的寄存器相同。 完成的参考电路图如下:dout=q 2、设计一个有左、右移位功能的8位寄存器REGSHIFT8,并仿真验证。
三、实验内容 1、通过输入数据先进行计算,并通过实验进行验证REG8X。 (1)、将清零信号Resetn(sw17)设为0,将输入信号D(sw7~sw0)设为10101010,观察输出信号Q(ledr7~ledr0)和Qb(ledg7~ledg0),观察并记录输出。 (2)、将清零信号Resetn(sw17)设为1,在时钟信号处输入一个上升沿(按下key0),观察并记录输出。 (3)、将输入信号D(sw7~sw0)设为01010101,观察并记录输出。 (4)、在时钟信号处输入一个上升沿(按下key0),观察并记录输出。 (5)、自行完善设计表格,观察并记录测试输出。 实验数据表 2、通过输入数据先进行计算,并通过实验进行验证REGSHIFT8。 (1)、测试清零信号Resetn (2)、测试移位功能 (3)、测试寄存功能 (4)、自行设计表格观察并记录测试输出。 实验数据表
实验报告 课程名称:自动控制原理 实验项目:典型环节的时域相应 实验地点:自动控制实验室 实验日期:2017 年 3 月22 日 指导教师:乔学工 实验一典型环节的时域特性 一、实验目的 1.熟悉并掌握TDN-ACC+设备的使用方法及各典型环节模拟电路的构成方法。
2.熟悉各种典型环节的理想阶跃相应曲线和实际阶跃响应曲线。对比差异,分析原因。 3.了解参数变化对典型环节动态特性的影响。 二、实验设备 PC 机一台,TD-ACC+(或TD-ACS)实验系统一套。 三、实验原理及内容 下面列出各典型环节的方框图、传递函数、模拟电路图、阶跃响应,实验前应熟悉了解。 1.比例环节 (P) (1)方框图 (2)传递函数: K S Ui S Uo =) () ( (3)阶跃响应:) 0()(≥=t K t U O 其中 01/R R K = (4)模拟电路图: (5) 理想与实际阶跃响应对照曲线: ① 取R0 = 200K ;R1 = 100K 。 ② 取R0 = 200K ;R1 = 200K 。
2.积分环节 (I) (1)方框图 (2)传递函数: TS S Ui S Uo 1 )()(= (3)阶跃响应: ) 0(1)(≥= t t T t Uo 其中 C R T 0= (4)模拟电路图 (5) 理想与实际阶跃响应曲线对照: ① 取R0 = 200K ;C = 1uF 。 ② 取R0 = 200K ;C = 2uF 。
1 Uo 0t Ui(t) Uo(t) 理想阶跃响应曲线 0.4s 1 Uo 0t Ui(t) Uo(t) 实测阶跃响应曲线 0.4s 10V 无穷 3.比例积分环节 (PI) (1)方框图: (2)传递函数: (3)阶跃响应: (4)模拟电路图: (5)理想与实际阶跃响应曲线对照: ①取 R0 = R1 = 200K;C = 1uF。 理想阶跃响应曲线实测阶跃响应曲线 ②取 R0=R1=200K;C=2uF。 K 1 + U i(S)+ U o(S) + Uo 10V U o(t) 2 U i(t ) 0 0 .2s t Uo 无穷 U o(t) 2 U i(t ) 0 0 .2s t
西安电子科技大学微机原理试题 姓名学号总分 一.填空题(每空1分,共30分) 1)15的8位二进制补码为,-15的8位二进制补码为。 2)某8位二进制补码为80H,其十进制表示为。 3)字符B的ASCII码为,字符0的ASCII码为。 4)8086CPU总线按功能可分为数据总线,总线和总线。 5)8086CPU数据总线包含条数据线,最多可寻址的存储器容量为。 6)CPU内部用于计算的部分为,用于保存下一条要执行的指令地址的 为。 A) 程序状态字B) 程序计数器C) ALU D) 工作寄存器 7)经常用作循环次数的寄存器是,用于I/O端口寻址的寄存器是。 A) AX B) BX C) CX D) DX 8)指令MOV CX, 1000的结果是CH= 。 9)将0D787H和4321H相加后,标志位CF= ,SF= ,ZF= , OF= ,AF= ,PF= 。 10)寄存器SI中能够表示的最大有符号数为,最小有符号数为。 11)设(DS)=4000H,(BX)=0100H,(DI)=0002H,(4002)=0A0AH,(40100)=1234H,(40102) =5678H,求以下指令分别执行后AX寄存器的值。 MOV AX , [2] (AX)= 。 MOV AX , [BX] (AX)= 。 MOV AX , [BX][DI] (AX)= 。 MOV AX , 1[BX] (AX)= 。 12)用一条指令将AX寄存器低四位清零,其余位不变:。 13)用一条指令将AX寄存器高四位取反,其余位不变:。 14)用一条指令将AX高8位与低8位交换:。 15)用一条指令将AL中的大写字母变成相应的小写:。 二.判断题(每题1分,共10分) 以下语句是语法正确的打√,语法错误打×,其中TABLE和TAB为两个字节类型的变量。 1)MOV DS , 1000H 2)MOV DS , TABLE 3)MOV [1200H] , [1300H] 4)ADD AX , BX , CX 5)XCHG AL , CL 6)CALL AL 7)MUL AX , BX 8)JU L1 9)SHR CL , CL
半加器、全加器、串行进位加法器以及超前进位加法器 一、实验原理 1.一位半加器 A和B异或产生和Sum,与产生进位C 2.一位全加器 将一位半加器集成封装为halfadder元件,使用两个半加器构成一位的全加器 3.4位串行进位加法器 将一位全加器集成封装为Fulladder元件,使用四个构成串行进位加法器
4.超前进位加法器(4位) ⑴AddBlock 产生并行进位链中的ti(即Cthis)和di(即Cpass),以及本位结果Sum ⑵进位链(Cmaker) 四位一组并行进位链,假设与或非门的级延迟时间为1.5ty,与非门的延迟时间为1ty,在di和ti产生之后,只需2.5ty就可产生所有全部进位
⑶超前进位加法器 将以上二者结合起来即可完成,A和B各位作为各个AddBlock的输入,低一位的进位Ci-1作为本位AddBlock的C-1的输入。各个AddBlock输出的C_this和C_pass作为对应的Cmaker的thisi和passi的输入。
二、实验器材 QuartusII仿真软件,实验箱 三、实验结果 1.串行进位加法器结果 2.超前进位加法器结果
四、实验结果分析 1.实验仿真结果显示串行加法器比超前进位加法器快,部分原因应该是电路结构优化 不到位。另外由于计算的位数比较少,超前进位加法链结构较复杂,所以优势没体现出来,反倒运作的更慢一点。当位数增加的时候,超前进位加法器会比串行的更快。 2.波形稳定之前出现上下波动,应该与“竞争冒险”出现的情况类似,门的延迟和路径 的不同导致了信号变化时到达的时间有先有后,因此在最终结果形成前出现了脉冲尖峰和低谷;另外也可能部分原因由于电路结构优化的不到位所致
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
微机系统实验报告 班级:031214 学号:03121370 姓名:孔玲玲 地点:E-II-312 时间:第二批
实验一汇编语言编程实验 一、实验目的 (1)掌握汇编语言的编程方法 (2)掌握DOS功能调用的使用方法 (3)掌握汇编语言程序的调试运行过程 二、实验设备 PC机一台。 三、实验内容 (1)将指定数据区的字符串数据以ASCII码形式显示在屏幕上,并通过DOS功能 调用完成必要提示信息的显示。 (2) 在屏幕上显示自己的学号姓名信息。 (3)循环从键盘读入字符并回显在屏幕上,然后显示出对应字符的ASCII码,直到 输入“Q”或“q”时结束。 (4)自主设计输入显示信息,完成编程与调试,演示实验结果。 考核方式:完成实验内容(1)(2)(3)通过, 完成实验内容(4)优秀。 实验中使用的DOS功能调用:INT 21H 表3-1-1 显示实验中可使用DOS功能调用 AH 值功能调用参数结果 1 键盘输入并回显AL=输出字符 2 显示单个字符(带Ctrl+Break检查) DL=输出字符光标在字符后面 6 显示单个字符(无Ctrl+Break检查) DL=输出字符光标在字符后面 8 从键盘上读一个字符AL=字符的ASCII码 9 显示字符串DS:DX=串地址,‘$’为结束字符光标跟在串后面 4CH 返回DOS系统AL=返回码
四、实验步骤 (1)运行QTHPCI软件,根据实验内容编写程序,参考程序流程如图3-1-1所示。 (2)使用“项目”菜单中的“编译”或“编译连接”命令对实验程序进行编译、连接。 (3)“调试”菜单中的“进行调试”命令进入Debug调试,观察调试过程中数据传输指令执行后各寄存器及数据区的内容。按F9连续运行。 (4)更改数据区的数据,考察程序的正确性。 五、实验程序 DATA SEGMENT BUFFER DB '03121370konglingling:',0AH,0DH,'$' BUFFER2 DB 'aAbBcC','$' BUFFER3 DB 0AH,0DH,'$' DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DA TA START: MOV AX,DA TA MOV DS,AX mov ah,09h mov DX,OFFSET BUFFER int 21h
《计算机组成原理与系统结构》课程设计 实 验 报 告 课题:两个16位二进制数加法计算 班级: 成员: 完成日期:2013年10月11日
一:课程设计步骤 1.确定设计目标 综合考虑实验条件及自身能力水平,以及设计功能的可靠性和实用性,我们小组决定将设计目标定为“两个16位二进制数相加”。分两次分别输入两个加数的低八位和高八位,输出两个16位二进制数相加的结果。 2.确定指令系统 (1)数据格式 模型机规定数据采用定点整数补码表示,字长为8位,其格式如下: 7 6 5 4 3 2 1 0 符号尾数 (2)指令格式 模型机设计四大类指令共16条,其中包括算术逻辑指令、I/O指令、访问及转移指令和停机指令。 ①算术逻辑指令 设计九条算术逻辑指令并用单字节表示,寻址方式采用寄存器直接寻址,其格式如下: 7 6 5 4 3 2 1 0 OP-CODE RS RD 其中,OP-CODE为操作码,RS为源寄存器,RD为目的寄存器,并规定: RS或RD 选定的寄存器 00 01 10 R0 R1 R2 ②I/O指令 输入(1N)和输入(OUT)指令采用单字节指令,其格式如下: 7 6 5 4 3 2 1 0 OP-CODE addr RD 其中,addr=01时,选中“INPUT DEVICE”中的开关组作为输入设备,addr=10时,选中“INPUT DEVICE”中的数码块作为输入设备。 ③访问指令及转移指令 模型机设计两条访问指令,即存数(STA)、取数(LDA),两条颛臾指令,即无条件转移(JMP)、结果为零或有进位转移(BZC),指令格式如下: 7 6 5 4 3 2 1 0 00 M OP-CODE RD D 其中,OP-CODE为操作码,rd为目的寄存器地址(LDA、STA指令使用)。D为位移量(正负均可),M为寻址模式,其定义如下: 寻址模式有效地址E 说明 00 E=D 直接寻址
自动控制原理实验报告 一、实验名称:一、二阶系统的电子模拟及时域响应的动态测试 二、实验目的 1、了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系 2、学习在电子模拟机上建立典型环节系统模型的方法 3、学习阶跃响应的测试方法 三、实验内容 1、建立一阶系统的电子模型,观测并记录在不同时间常数T时的响应曲线,测定过渡过程时间T s 2、建立二阶系统电子模型,观测并记录不同阻尼比的响应曲线,并测定超调量及过渡过程时间T s 四、实验原理及实验数据 一阶系统 系统传递函数: 由电路图可得,取则K=1,T分别取:0.25, 0.5, 1 T 0.25 0.50 1.00 R2 0.25MΩ0.5M Ω1MΩ C 1μ1μ1μ T S 实测0.7930 1.5160 3.1050 T S 理论0.7473 1.4962 2.9927 阶跃响应曲线图1.1 图1.2 图1.3 误差计算与分析 (1)当T=0.25时,误差==6.12%; (2)当T=0.5时,误差==1.32%; (3)当T=1时,误差==3.58% 误差分析:由于T决定响应参数,而,在实验中R、C的取值上可能存在一定误差,另外,导线的连接上也存在一些误差以及干扰,使实验结果与理论值之间存在一定误差。但是本实验误差在较小范围内,响应曲线也反映了预期要求,所以本实验基本得到了预期结果。 实验结果说明 由本实验结果可看出,一阶系统阶跃响应是单调上升的指数曲线,特征有T确定,T越小,过度过程进行得越快,系统的快速性越好。 二阶系统 图1.1 图1.2 图1.3
系统传递函数: 令 二阶系统模拟线路 0.25 0.50 1.00 R4 210.5 C2 111 实测45.8% 16.9% 0.6% 理论44.5% 16.3% 0% T S实测13.9860 5.4895 4.8480 T S理论14.0065 5.3066 4.8243 阶跃响应曲线图2.1 图2.2 图2.3 注:T s理论根据matlab命令[os,ts,tr]=stepspecs(time,output,output(end),5)得出,否则误差较大。 误差计算及分析 1)当ξ=0.25时,超调量的相对误差= 调节时间的相对误差= 2)当ξ=0.5时,超调量的相对误差==3.7% 调节时间的相对误差==3.4% 4)当ξ=1时,超调量的绝对误差= 调节时间的相对误差==3.46% 误差分析:由于本试验中,用的参量比较多,有R1,R2,R3,R4;C1,C2;在它们的取值的实际调节中不免出现一些误差,误差再累加,导致最终结果出现了比较大的误差,另外,此实验用的导线要多一点,干扰和导线的传到误差也给实验结果造成了一定误差。但是在观察响应曲线方面,这些误差并不影响,这些曲线仍旧体现了它们本身应具有的特点,通过比较它们完全能够了解阶跃响应及其性能指标与系统参数之间的关系,不影响预期的效果。 实验结果说明 由本实验可以看出,当ωn一定时,超调量随着ξ的增加而减小,直到ξ达到某个值时没有了超调;而调节时间随ξ的增大,先减小,直到ξ达到某个值后又增大了。 经理论计算可知,当ξ=0.707时,调节时间最短,而此时的超调量也小于5%,此时的ξ为最佳阻尼比。此实验的ξ分布在0.707两侧,体现了超调量和调节时间随ξ的变化而变化的过程,达到了预期的效果。 图2.2 图2.1 图2.3
三.名词解释 47、传递函数:传递函数是指在零初始条件下,系统输出量的拉式变换与系统输入量的拉式变换之比。 48、系统校正:为了使系统达到我们的要求,给系统加入特定的环节,使系统达到我们的要求,这个过程叫系统校正。 49、主导极点:如果系统闭环极点中有一个极点或一对复数极点据虚轴最近且附近没有其他闭环零点,则它在响应中起主导作用称为主导极点。 50、香农定理:要求离散频谱各分量不出现重叠,即要求采样角频率满足如下关系: ωs ≥2ωmax 。 51、状态转移矩阵:()At t e φ=,描述系统从某一初始时刻向任一时刻的转移。 52、峰值时间:系统输出超过稳态值达到第一个峰值所需的时间为峰值时间。 53、动态结构图:把系统中所有环节或元件的传递函数填在系统原理方块图的方块中,并把相应的输入、输出信号分别以拉氏变换来表示,从而得到的传递函数方块图就称为动态结构图。 54、根轨迹的渐近线:当开环极点数 n 大于开环零点数 m 时,系统有n-m 条根轨迹终止于 S 平面的无穷远处,且它们交于实轴上的一点,这 n-m 条根轨迹变化趋向的直线叫做根轨迹的渐近线。 55、脉冲传递函数:零初始条件下,输出离散时间信号的z 变换()C z 与输入离散信号的z 变换()R z 之比,即()()() C z G z R z =。 56、Nyquist 判据(或奈氏判据):当ω由-∞变化到+∞时, Nyquist 曲线(极坐标图)逆时针包围(-1,j0)点的圈数N ,等于系统G(s)H(s)位于s 右半平面的极点数P ,即N=P ,则闭环系统稳定;否则(N ≠P )闭环系统不稳定,且闭环系统位于s 右半平面的极点数Z 为:Z=∣P-N ∣ 57、程序控制系统: 输入信号是一个已知的函数,系统的控制过程按预定的程序进行,要求被控量能迅速准确地复现输入,这样的自动控制系统称为程序控制系统。 58、稳态误差:对单位负反馈系统,当时间t 趋于无穷大时,系统对输入信号响应的实际值与期望值(即输入量)之差的极限值,称为稳态误差,它反映系统复现输入信号的(稳态)精度。 59、尼柯尔斯图(Nichocls 图):将对数幅频特性和对数相频特性画在一个图上,即以(度)为线性分度的横轴,以 l(ω)=20lgA(ω)(db )为线性分度的纵轴,以ω为参变量绘制的φ(ω) 曲线,称为对数幅相频率特性,或称作尼柯尔斯图(Nichols 图) 60、零阶保持器:零阶保持器是将离散信号恢复到相应的连续信号的环节,它把采样时刻的采样值恒定不变地保持(或外推)到下一采样时刻。 61、状态反馈设系统方程为,x Ax Bu y cx =+=&,若对状态方程的输入量u 取u r Kx =-,则称状态反馈控制。 四.简答题
4.37 (上机题)编写程序实现,将缓冲区BUFFER中的100个字按递增排序,并按下列格式顺 序显示: 数据1 <原序号> 数据2 <原序号> …… 算法流程图: 调试问题、心得体会: 通过这道题,熟悉了流程图画法,掌握了产生随机数,“冒泡法”排序,子函数编写调用等的基本过程,尤其对于中断调用,并利用ASCII码回显和对课本字节型数据“冒泡法”排序改进为字形排序的过程,是我受益匪浅。并且亲身实践了源程序的汇编、调试也连接。 问题:将字节型冒泡法直接应用于该题,导致出错,该题存储的是字型数据!
原因在于只是排列的AL中的数值,并不是产生的随机数! 同时对于字型与字节型在运算类指令中的应用还是有误,以及其他的一些小错误,应加以改善! 运行结果: 程序代码: STACK SEGMENT STACK 'STACK' DW 100H DUP(?) TOP LABEL WORD STACK ENDS DATA SEGMENT BUFFER LABEL WORD
X=17 REPT 100 X=(X+80)mod 43 DW X ENDM BUF DW 100 DUP(?) DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA,ES:DATA,SS:STACK START: MOV AX,DATA MOV DS,AX MOV ES,AX MOV AX,STACK MOV SS,AX LEA SP,TOP MOV CX,100 LEA SI,BUFFER LEA DI,BUF L1: MOV AX,[SI] INC SI INC SI MOV [DI],AX INC DI INC DI LOOP L1 MOV CX,100 DEC CX LEA SI,BUFFER PUSH CX ADD CX,CX ADD SI,CX POP CX L2: PUSH CX PUSH SI L3: MOV AX,[SI] CMP AX,[SI-2] JAE NOXCHG XCHG AX,[SI-2] MOV [SI],AX NOXCHG:
武汉大学计算机学院计算机科学与技术专业 CPU设计实验报告 实验名称:开放式实验CPU设计课题名称: 计算机组成原理 班级: 指导教师:徐爱萍 组长: 组员: 二零一五年三月
目录 目录 (1) 1 实验环境 (2) 1.1 Quartus Ⅱ介绍 (2) 1.2 硬件描述语言(VHDL) (3) 1.3实验的主要成果 (3) 2 实验要求 (5) 2. 1 指令格式要求 (5) 2. 2 指令流程及微信号序列分析 (6) 2.2.1 ADD指令分析 (6) 2.2.2 ADC指令分析 (7) 2.2.3 SUB指令分析 (7) 2.2.4 SBC指令分析 (7) 2.2.5 INC指令分析 (7) 2.2.6 DEC指令分析 (8) 2.2.7 SHL指令分析 (8) 2.2.8 SHR指令分析 (8) 2.2.9 MOVR指令分析 (8) 2.2.10 MOVD指令分析 (9) 2.2.11 LDRR指令分析 (9) 2.2.12 STRR指令分析 (10) 2.2.13 JMP指令分析 (10) 2.2.14 JRC指令分析 (11) 2.2.15 JRZ指令分析 (11) 2.2.16 JRS指令分析 (11) 2.2.17 CLC指令分析 (11) 2.2.18 STC指令分析 (11) 3.部件仿真实验 (11) 3.1 八个通用寄存器设计与仿真 (11) 3.1.1 设计代码 (11) 3.1.2 RTL连接图 (17) 3.1.3 仿真过程 (17) 3.2算术逻辑单元设计与仿真 (18) 3.2.1 设计代码 (18) 3.2.2 RTL连接图 (21) 3.2.3 仿真过程 (22) 4. CPU设计 (23) 4.1取指设计 (23) 4.2指令译码的设计 (25) 4.3执行部分设计 (28) 4.4存储器部分设计 (31) 4.5通用寄存器组设计 (32)
汇编语言上机题 姓名:学号:成绩: 实验一、上机过程及DEBUG应用 编写程序,建立数据段DATA,将你的姓名(汉语拼音)及学号存入DATA数据段的BUFFER1区域,然后利用程序将BUFFER1区域中的字符串(姓名及学号)依次传送到从BUFFER2开始的内存区域中去。 上机过程与要求 1.建立原程序: 源程序文件名为,源程序清单如下: data segment buffer1 db 'hepan04105038' buffer2 db 13 dup() data ends code segment ASSUME CS:CODE,DS:DATA START: mov ax,data mov ds,ax mov es,ax lea si,buffer1 lea di,buffer2 mov cx,0d cld rep movsb mov ah,4ch int 21h code ends end start 2.汇编后生成的obj文件名为buffer .OBJ 3.连接后生成的目标文件名为buffer .EXE 4.DEBUG调试:在DEBUG下,利用U、D、G、R等命令对EXE文件进行调试后,相关信息如下: (1)表1-1 反汇编清单中所反映的相关信息 *注:最后一条指令是对应于代码段中最后一条指令 (2)在未执行程序之前,用D命令显示内存区域BUFFER1及BUFFER2中的内容, 其相关信息如表1-2所示。 表1-2 未执行程序之前的数据区内容
(3)执行程序以后用D命令显示内存区域的相关信息,如表1-3。 表1-3 执行程序之后的数据区内容 (4)用R命令检查寄存器的内容如表1-4所示。 回答问题 a)宏汇编命令MASM的作用是什么 答:产生OBJ文件。 b)连接命令LINK的作用是什么连接后生成什么文件 答:产生EXE文件,生成EXE文件。 c)DEBUG下U命令的作用是什么 答:反汇编被调试命令。 d)DEBUG下D命令的作用是什么 答:显示内存单元的内容。 e) 在DEBUG下如何执行.EXE文件,写出执行命令的常用格式。 答:DEBUG 。 实验二、寻址方式练习 掌握8086/8088的寻址方式是学习汇编语言的基础,因此,我们以数据传送指令为例编写了下面的程序,通过该程序对主要的几种寻址方式进行练习。 DATA1 SEGMENT M1 DB 0A0H,0A1H,0A2H,0A3H,0A4H,0A5H M2 DB 0A6H,0A7H,0A8H,0A9H,0AAH,0ABH,0ACH,0ADH,0AEH,0AFH DATA1 ENDS DATA2 SEGMENT N1 DB 0B0H,0B1H,0B2H,0B3H, 0B4H,0B5H N2 DB 0B6H,0B7H, 0B8H,0B9H,0BAH,0BBH, 0BCH,0BDH,0BEH,0BFH DATA2 ENDS STACK SEGMENT PARA STACK ‘STACK’ DB 0C0H,0C1H,0C2H,0C3H, 0C4H,0C5H DB 0C6H,0C7H, 0C8H,0C9H,0CAH,0CBH, 0CCH,0CDH,0CEH,0CFH
计算机组成原理实验报告 课程名称计算机组成原理实验 学院计算机学院 专业班级 学号 学生姓名 指导教师 2015年 06 月20 日
计算机学院( 学号: 姓名教师评定 实验题目基础汇编语言程序设计实验 实验一:基础汇编语言程序设计实验 一、实验目的: (1)学习和了解TEC-XP+教学实验系统监控命令的用法; (2)学习和了解TEC-XP+教学实验系统的指令系统; (3)学习简单的TEC-XP+教学实验系统汇编语言程序。 二、实验设备与器材: TEC-XP+教学实验系统,仿真终端软件。 三、实验内容: 1、学习联机使用TEC-XP+教学实验系统和仿真终端软件PCEC; 2、学习使用WINDOWS界面的串口通讯软件; 3、使用监控程序的R命令显示/修改寄存器内容、D命令显示存储器内容、E命令修改存储器内容;
4、使用A命令编写一小段汇编程序,U命令反汇编刚输入的程序,用G命令连续运行改程序,用T、P命令单步运行并观察程序单步执行的情况。 四、实验步骤: 一、实验具体操作步骤: 1、准备一台串口工作良好的PC机; 2、将TEC-XP放在实验台上,打开实验箱的盖子,确定电源处于断开状态; 3、将黑色电源线一端接220V交流电源,另一端插在TEC--XP试验箱电源插座上; 4、取出通讯线,将通信线的9芯插头接在试验箱的串口“COM1”或“COM2”上,另一端接到PC机的串口上; 5、将TEC-XP实验系统左下方的6个黑色控制器开关置为001100,,控制开关的功能在开关上、下方有标识;开关拨向上方表示“1”,拨向下方表示“0”,“x”表示任意,其他实验相同; 6、打开电源,船形开关和5v电源指示灯亮。 7、在PC机上运行PCEC16.EXE文件,直接回车。 8、按一下“RESET”按键,再按一下“START”按键在主机上显示: TEC—2000 CRT MONITOR Version 1.0 April 2001 Computer Architectur Lab,Tsinghua University Programmed by He Jia > 二、实验注意事项: 几种常见的工作方式(开关拨到上方表示为1,拨到下方为0)
微机上机作业三 容: 编写如下程序,并在机器上调试成功。程序采用菜单式选择,可以接收用户从键盘输入的五个命令(1-5),各命令功能分别为: (1)按下“1”键,完成字符串小写字母变成大写字母。 (2)按下“2”键,完成找最大值(二选一)。 (3)按下“3”键,完成排序(二选一)。 (4)按下“4”键,显示时间。 (5)按下“5”键,结束程序运行,返回系统提示符。 汇编程序: STACK SEGMENT STACK DB 256 DUP(?) TOP LABEL WORD STACK ENDS DATA SEGMENT TABLE DW G1, G2, G3, G4, G5 STRING0 DB' Form the school ID is 02111460 Li Cheng',0DH,0AH,'$' STRING1 DB '1. Change small letters into capital letters of string;', 0DH, 0AH, '$' STRING2 DB '2. Find the maximum of string;', 0DH, 0AH, '$' STRING3 DB '3. Sort for datas;', 0DH, 0AH, '$' STRING4 DB '4. Show Time;', 0DH, 0AH, '$' STRING5 DB '5. Exit.', 0DH, 0AH, '$' STRINGN DB 'Input the number you select (1-5) : $' IN_STR DB 'Input the string (including letters & numbers, less than 60 letters) :', 0DH, 0AH, '$' PRESTR DB 'Original string : $' NEWSTR DB 'New string : $' OUT_STR DB 'The string is $' MAXCHR DB 'The maximum is $' IN_NUM DB 'Input the numbers (0 - 255, no more than 20 numbers) : ', 0DH, 0AH, '$' OUT_NUM DB 'Sorted numbers : ', 0DH, 0AH, '$' IN_TIM DB 'Correct the time (HH:MM:SS) : $' HINTSTR DB 'Press ESC, go back to the menu; or press any key to play again!$' KEYBUF DB 61 DB ? DB 61 DUP (?) NUMBUF DB ? DB 20 DUP (?) DATA ENDS
2、设计报告 2、1实验方法 本实验要完成的工作主要包括: 1、指令系统的设计 2、利用VHDL语言完成实验CPU的设计,包括通用寄存器的设计、取值部分设计、指令译 码设计、执行设计、存储器设计、程序包设计和顶层设计设计 3、在Quatus II 平台上进行仿真,并下载到TEC-CA教学实验箱上进行调试。 这三大部分为并行关系,只有在完成上一部分的基础上才能继续进行下一步,而第二大部分可以同时并行进行。 实验的主要流程图为图2.1所示。 图2.1
在指令系统和CPU逻辑设计时,主要的方法是先根据老师给的指令要求,确定CPU所要实现的功能,根据寄存器等的情况划分指令格式,然后根据功能写出指令,根据不同指令的特点将它们分组并确定操作码;接下来设想每条指令的执行过程,需要哪些硬件支持,最后确定整个CPU的逻辑结构图。 2、2总体说明 2.2.1 CPU组成部件 实验CPU由5部分组成:取指部分instru_fetch、指令译码部分decoder_unit、执行部分exe_unit、存储器部分memory_unit和通用寄存器组fegile.另外,还有一个程序包exe_cpu_components,将各底层设计实体作为元件存储,供各设计实体使用。顶层设计实体exe_cpu完成5个组成部分的链接。 GR(8位,4个寄存器),ALU(8位),时序节拍发生器timer,AR(8位),IR(8位),PC(8位)、PC(8位),RAM(8位),组合期间T1,T2,T3。逻辑控制器件controller,地址总线(8位),数据总线(8位)。 2、2、2整机原理实验图
图2.2.1 图2.2.2