文献综述
电气工程及自动化
无刷直流电机控制器的综述
摘要:实现由专用集成芯片及外围电路构成的一种体积小、结构紧凑、调试方便的无刷
直流电机控制器,实现电机的正反转,并分析了各部分的电路结构。
关键词: MC33035; MC33039;无刷直流电机;控制器;
1引言
无刷直流电机是随着大功率开关器件、专用集成电路、稀有永磁材料、微机、新型控制理论及电机理论的发展而迅速发展起来的一种新型电动机,它比交流电动机的结构简单、运行可靠、维护方便等优点,又具备直流电动机运行效率高、无励磁损耗、调速性能好等特点,因此在当今国民经济的各个领域(如医疗器械、仪器仪表、化工、轻纺以及家用电器等方面) 的应用日益普及。
2无刷电机的控制结构及原理
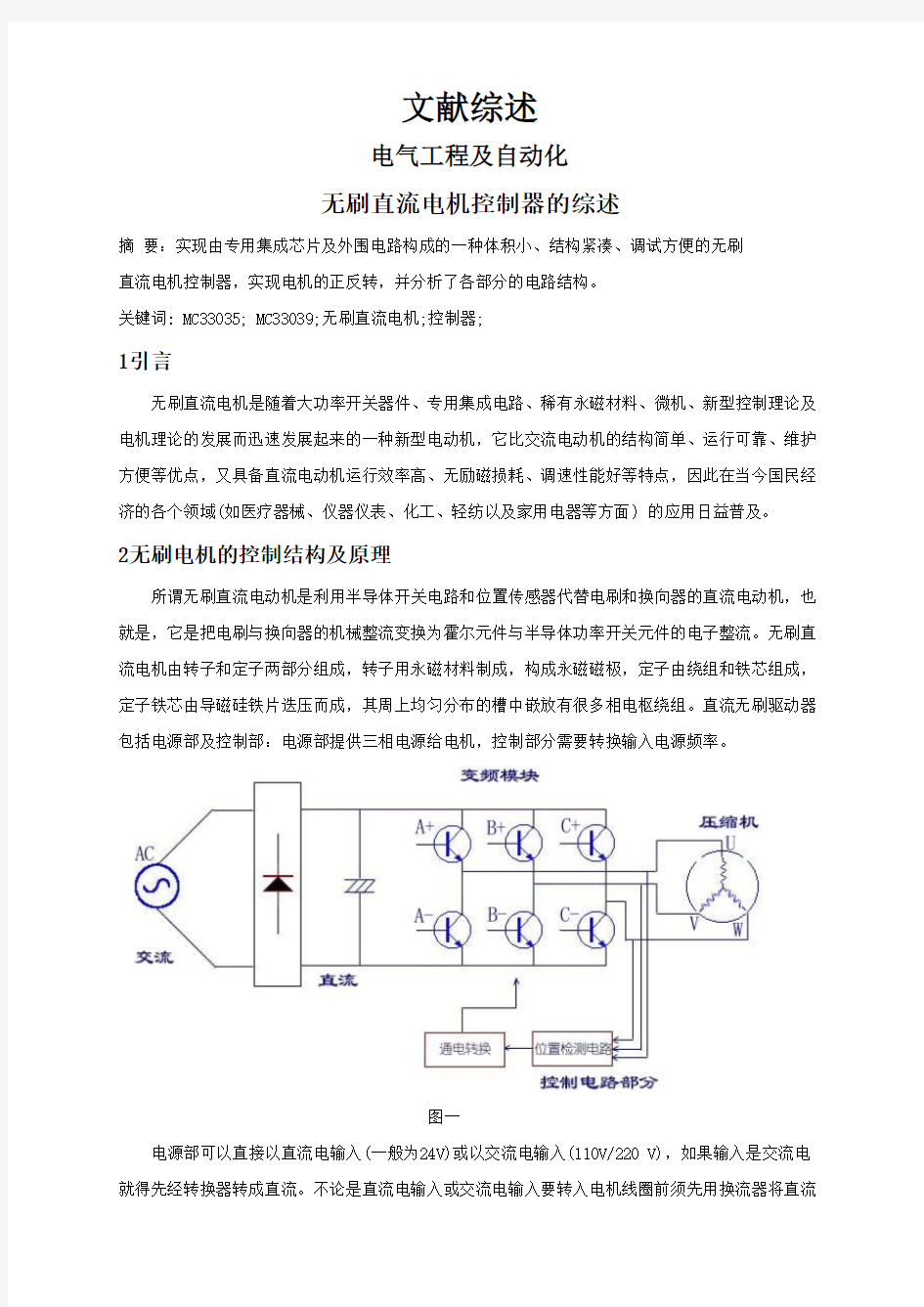
所谓无刷直流电动机是利用半导体开关电路和位置传感器代替电刷和换向器的直流电动机,也就是,它是把电刷与换向器的机械整流变换为霍尔元件与半导体功率开关元件的电子整流。无刷直流电机由转子和定子两部分组成,转子用永磁材料制成,构成永磁磁极,定子由绕组和铁芯组成,定子铁芯由导磁硅铁片迭压而成,其周上均匀分布的槽中嵌放有很多相电枢绕组。直流无刷驱动器包括电源部及控制部:电源部提供三相电源给电机,控制部分需要转换输入电源频率。
图一
电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先用换流器将直流
电压转换成3 相电压来驱动电机,换流器一般由6个功率晶体管分为上臂(A+、B+、C+)臂(A-、B-、C-)连接电机作为控制流经电机线圈的开关。控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器作为之闭回路控制,同时也作为相序控制的依据。
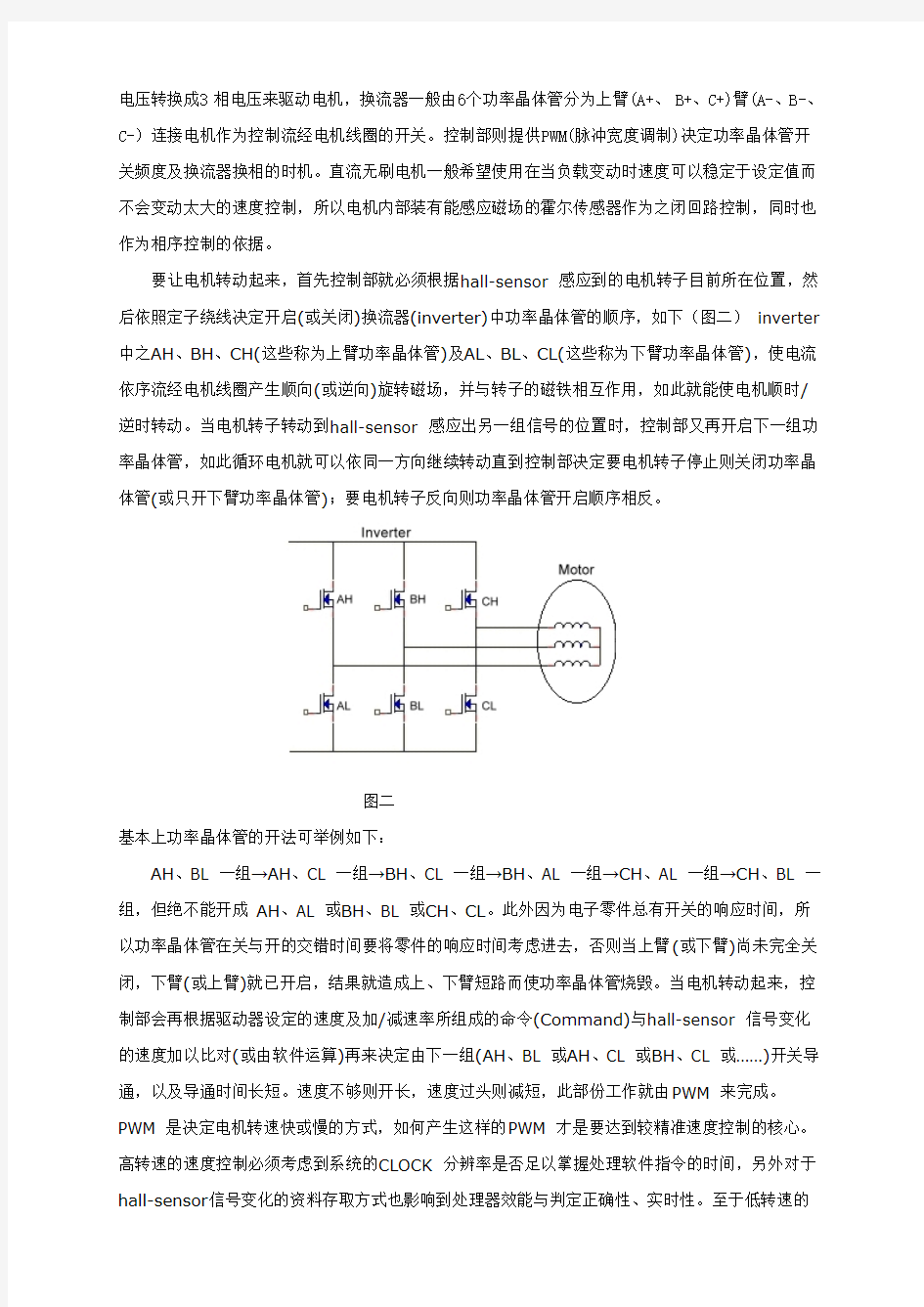
要让电机转动起来,首先控制部就必须根据hall-sensor 感应到的电机转子目前所在位置,然后依照定子绕线决定开启(或关闭)换流器(inverter)中功率晶体管的顺序,如下(图二)inverter 中之AH、BH、CH(这些称为上臂功率晶体管)及AL、BL、CL(这些称为下臂功率晶体管),使电流依序流经电机线圈产生顺向(或逆向)旋转磁场,并与转子的磁铁相互作用,如此就能使电机顺时/
逆时转动。当电机转子转动到hall-sensor 感应出另一组信号的位置时,控制部又再开启下一组功率晶体管,如此循环电机就可以依同一方向继续转动直到控制部决定要电机转子停止则关闭功率晶体管(或只开下臂功率晶体管);要电机转子反向则功率晶体管开启顺序相反。
图二
基本上功率晶体管的开法可举例如下:
AH、BL 一组→AH、CL 一组→BH、CL 一组→BH、AL 一组→CH、AL 一组→CH、BL 一组,但绝不能开成AH、AL 或BH、BL 或CH、CL。此外因为电子零件总有开关的响应时间,所以功率晶体管在关与开的交错时间要将零件的响应时间考虑进去,否则当上臂(或下臂)尚未完全关闭,下臂(或上臂)就已开启,结果就造成上、下臂短路而使功率晶体管烧毁。当电机转动起来,控制部会再根据驱动器设定的速度及加/减速率所组成的命令(Command)与hall-sensor 信号变化的速度加以比对(或由软件运算)再来决定由下一组(AH、BL 或AH、CL 或BH、CL 或……)开关导通,以及导通时间长短。速度不够则开长,速度过头则减短,此部份工作就由PWM 来完成。PWM 是决定电机转速快或慢的方式,如何产生这样的PWM 才是要达到较精准速度控制的核心。高转速的速度控制必须考虑到系统的CLOCK 分辨率是否足以掌握处理软件指令的时间,另外对于hall-sensor信号变化的资料存取方式也影响到处理器效能与判定正确性、实时性。至于低转速的
速度控制尤其是低速起动则因为回传的hall-sensor 信号变化变得更慢,怎样撷取信号方式、处理时机以及根据电机特性适当配置控制参数值就显得非常重要。或者速度回传改变以encoder 变化为参考,使信号分辨率增加以期得到更佳的控制。电机能够运转顺畅而且响应良好,P.I.D.控制的恰当与否也无法忽视。之前提到直流无刷电机是闭回路控制,因此回授信号就等于是告诉控制部现在电机转速距离目标速度还差多少,这就是误差(Error)。知道了误差自然就要补偿,方式有传统的工程控制如P.I.D.控制。但控制的状态及环境其实是复杂多变的,若要控制的坚固耐用则要考虑的因素恐怕不是传统的工程控制能完全掌握,所以模糊控制、专家系统及神经网络也将被纳入成为智能型P.I.D.控制的重要理论。
3 专用控制芯片简介
MC33035是一个采用24脚封装的双列直插式集成电路,是高性能的单片直流无刷电机控制系列芯片之一,它内部具备实现一个有限特征、开环、三相或四相电动机控制系统所需要的全部功能,采用双极性模拟工艺制造,可在任何恶劣的工业环境条件下保证高品质和高稳定性。
图三
用3个霍尔集成电路作为转子位置传感器, 信号经4、5、6 脚输入MC33035, 由译码电路转换为6路驱动输出, 3路上侧驱动输出为1、2、24 脚, 下侧驱动输出为19、20、21引脚。另外, 用8脚参考电压作为它们的电源, 由3脚逻辑电平来确定电动机转向, 电机的起动停止是由7 脚使能端实现, 23 脚为高电平时,电机进行制动操作, 由22脚进行传感相位差的选择。
电子测速器件MC33039
MC33039是一个8脚双列直插窄式集成电路块,是为无刷直流电动机闭环速度控制专门设计的集
成电路,采用MC33039,系统不必再使用较高价格的电磁式或光电式测速机,就可实现精确的调速控制,直接利用三相无刷直流电动机转子位置传感器的三个输出信号,并经F/V将其变换成正比于电动机转速的电压。1、2、3脚直接利用电机转子位置传感器3个输出信号, 经变换后形成与电机转速相关的信号从5脚输出。
图四
三相逆变桥功率模块MPM3003
MPM3003是一种三相逆变桥功率模块,包括三个P沟道和三个N沟道功率MOSFET。MPM3003采用12脚塑料封装,其内部集成了6个MOSFET。
4 电机正反转功能的实现
无刷直流电机不能简单地通过改变绕组连接或逻辑输出信号的相序来实现电动机的反转,当电动机需要正反转时,应采用可逆换相控制,即控制电路中包括正、反向两组换相逻辑。在正向逻辑中,每相位置传感器超前该相绕组的电角度60°,开通角θ为30°电角度,即霍尔信号滞后相反电动势过零点30°电角度开关动作。当转子反转时,霍尔信号滞后变为了超前相反电动势过零点30°电角度,同时三组霍尔信号的相序也发生了变化,上桥臂功率管的驱动信号与正向逻辑时的下桥臂功率管的驱动信号相一致;而下桥臂功率管的驱动信号与正向逻辑时上桥臂功率管的驱动信号相一
致。
两相导通状态图
5结论
MC33035 可方便地用来控制无刷直流电动机,其外围电路简单,控制功能强,保护功能完善;易于调试,通用性好且成本低。它不仅可控制无刷直流电动机,也可以用于有刷直流电动机的控制驱动,并保持全面的控制功能。对于更高电压的功率驱动,可通过电平转换驱动电路实现。特别是MC33035 还具有工业级应用温度范围,用于工作环境恶劣,对控制器体积、性价比要求较高的场合,已广泛用于各种调速驱动场合,毫无疑问,其应用前景将是十分广阔的!
参考文献
[1] 林瑞光电机与拖动基础[M] 浙江:浙江大学出版社 2002年
[2] 廖晓钟刘向东自动控制系统[M] 北京北京理工大学出版社 2005年
[3] Gui-Jia Su and John W. McKeeve Low-Cost Sensorless Control of Brushless dc Motors
with Improved Speed Range [D] Oak Ridge National Laboratory National Transportation Research Center 2005
[4] 潘建无刷直流电机控制器MC33035 的原理及应用[J] 《国外电子元器件》 2003年第8期
39-41
[5] 程众悦季小尹基于专用集成电路的无刷直流电机控制器设计[J]《微电机》2007年第40
卷第1期:90-91
[6] 何希才姜余祥电动机控制电路应用实例[M] 北京:中国电力出版社2005年
[7] 陈伯时阮毅电力拖动自动控制系统[M] 北京: 机械出版社 2010年
[8] 谭建成电机控制专用集成电路[M ] 北京: 机械工业出版社 2003年
[9] 王淑芳电机驱动技术[M] 北京:科学出版社 2008年
[10] 孙建忠,白凤仙特种电机及其控制[M] 北京:中国水利水电出版社 2005年
[11] 孙立志 PWM与数字化电动机控制技术应用[M] 北京中国电力出版社2008年
XX职业技术学院 毕业项目 2011 届 项目类别:毕业设计_________ _ _____ 项目名称:单片机直流电机调速系统的设计 专业名称:机电一体化 姓名:XXX 班级:08机电3班 指导教师:XX 2011年X月X日 目录 摘要 (3) Abstract (4) 一、总体设计概述 (5) (一)总体硬件电路设计 (5) (二)系统总体设计框图 (5) (三)8051单片机简介 (6) 二、PWM信号发生电路设计 (8) (一)PWM的基本原理 (8) (二)PWM信号发生电路设计 (8) (三)PWM发生电路主要芯片的工作原理 (10) 三、功率放大驱动电路设计..................................................................,11 (一)芯片IR2110性能及特点 (11) (二)IR2110的引脚图以及功能 (11)
四、主电路设计 (12) (一)延时保护电路 (12) (二)主电路 (12) (三)输出电压波形 (13) (四)系统总体电路图 (14) 五、测速发电机 (16) 六、滤波电路 (17) 七、A/D转换 (18) (一)芯片选型 (18) (二)ADC0809的引脚及其功能 (18) 八、系统软件部分的设计 (19) (一)PI 转速调节器原理图及参数计算...............................................................,. (19) (二)系统中的部分程序设计 (19) (三)主程序设计 (19) (四)PI控制算法子程序设计 (20) 九、系统调试 (22) (一)软件调试 (22) (二)系统仿真 (22) 十、论 (23) 致谢 (24) 参考文献 (25) 摘要 本文主要研究了利用MCS-51系列单片机控制PWM信号从而实现对直流电机转速进行控制的方法。文章中采用了专门的芯片组成了PWM信号的发生系统,并且对PWM信号的原理、产生方法以及如何通过软件编程对PWM信号占空比进行调节,从而控制其输入信号波形等均作了详细的阐述。此外,本文中还采用了芯片IR2110作为直流电机正转调速功率放大电路的驱动模块,并且把它与延时电路相结合完成了在主电路中对直流电机的控制。另外,本系统中使用了测速发电机对直流电机的转速进行测量,经过滤波电路后,将测量值送到A/D转换器,并且最终作为反馈值输入到单片机进行PI运算,从而实现了对直流电机速度的控制。在软件方面,文章中详细介绍了PI运算程序,初始化程序等的编写思路和具体的程序实现。 关键词:PWM信号;测速发电机;PI运算 Abstract
直流无刷和有刷电机优缺点对比 直流无刷电机的原理是在有刷电机的基础上开发和演变的。在未来的一段时间里将是有刷的替代品随着世界各地发起的保护地球的口号有刷终终究会被无刷所取代。无刷直流电机的基本原理去掉了碳刷用电子元器件代替。用电子元器件的开关特性取代机械碳刷使换向变得无机械接触。无刷相对有刷的电机来说有如下优点一、运行声音小这将是我们这个文明社会必将行进的方向。另何工具它都要求降低噪声来保护我们的声音环境。现在最关键的是用在一些需要安静的地方如医院、银行、机场学校等等安静的场所。二、无火花在一些场合就可以大显身手了有一些易燃易爆的地方。三、寿命长因为它用控制器代替了换向器和碳刷是有刷电机的几倍甚至十几倍。碳刷的寿命是有一定的限度的比如一千个小时碳刷就会磨损殆尽只能更换电刷可是更换电机。四、速度高因为采用了磁场感应没有实质的接触速度可以做的更快。有了这么多的优点但是也有不好的地方一、造价高控制器的成本增加至少百元拿微电机来说。原来的换向器和碳刷的成本要低的多。二、如果使用的环境是在高磁场的地方或曾经接触或和高磁场很近电机将失去作用。因为电机本身的转子部件是磁体所作是经过充磁才有磁性的经过高磁场将改变转子的磁场或是消掉了部分的磁性电机都将不能正常工作。再给你补全一点 1 有位置传感器控制方式优点①因为有霍尔位置传感器所以电机换相准确转子位置检测的准确度不受电机转速的影响②不需要外加的转子位置检测电路硬件电路简单③电机换相控制编程简单不需要处理滤波延迟等问
题。缺点①增大了电机的体积。安装了位置传感器后一方面电机结构变复杂了另一方面电机的体积相对来说变大了妨碍了电机的小型化②增加了电机成本。容量在数百瓦以下的小容量方波型无刷直流电机常用的霍尔位置传感器的成本相对于电机本体来说所占比例比较大③传感器的输出信号易受到干扰。传感器的输出信号都是弱电信号在高温、冷冻、湿度大、有腐蚀物质、空气污浊等工作环境及振动、高速运行等工作条件下都会降低传感器的可靠性。若传感器损坏还可能连锁反应引起逆变器等器件的损坏④传感器的安装精度对电机的运行性能影响很大相对增加了生产工艺的难度。2 无位置传感器控制方式优点①降低成本减小电机的体积②抗干扰能力强能在高温、湿度大、有腐蚀物质、空气污浊的环境中工作③无传感器安装的问题减小电机的生产难度。缺点①如反电势法等转子位置检测方法在低速时检测准确度都不高需要其他方法辅助电机起动②由于各种滤波、比较电路引起的相位延迟必须在算法中加以补偿所以算法编程难度较大③由于架构了转子位置检测电路所以增加了硬件的复杂性。
无刷直流电机驱动器说 明书 -CAL-FENGHAI.-(YICAI)-Company One1
无刷驱动器DBLS-02 一概述: 本控制驱动器为闭环速度型控制器,采用最近型IGBT和MOS功率器,利用直流无刷电机的霍尔信号进行倍频后进行闭环速度控制,控制环节设有PID速度调节器,系统控制稳定可靠,尤其是在低速下总能达到最大转矩,速度控制范围150~10000rpm。 二产品特征: 1、 PID速度、电流双环调节器 2、高性能低价格 3、 20KHZ斩波频率 4、电气刹车功能,使电机反应迅速 5、过载倍数大于2,在低速下转矩总能达到最大 6、具有过压、欠压、过流、过温、霍尔信号非法等故障报警功能 三电气指标 标准输入电压:24VDC~48VDC,最大电压不超过60VDC。 最大输入过载保护电流:15A、30A两款 连续输出电流:15A加速时间常数出厂值:秒其他可定制 四端子接口说明 : 1、电源输入端: 引角序号引角名中文定义 1V+直流+24~48VDC输入 2GND GND输入 引角序号引角名中文定义 1MA电机A相
2MB电机B相 3MC电机C相 4GND地线 5HA霍尔信号A相输入端 6HB霍尔信号B相输入端 7HC霍尔信号C相输入端 8+5V霍尔信号的电源线 GND:信号地F/R:正、反转控制,接GND反转,不接正转,正反转切换时,应先关断ENEN:使能控制:EN接地,电机转(联机状态),EN不接,电机不转(脱机状态)BK:刹车控制:当不接地正常工作,当接地时,电机电气刹车,当负载惯量较大时,应采用脉宽信号方式,通过调整脉宽幅值来控制刹车效果。SV ADJ:外部速度衰减:可以衰减从0~100%,当外部速度指令接时,通过该电位器可以调速试机PG:电机速度脉冲输出:当极对数为P时,每转输出6P个脉冲(OC门输入)ALM:报警输出:当电路处于报警状态时,输出低电平(OC门输出)+5V:调速电压输出,可用电位器在SV和GND形成连续可调内置电位器:调节电机速度增益,可以从0~100%范围内调速。 五驱动器与无刷电机接线图
目录 1前言 (3) 1.1电动机技术发展及现状 (3) 2电动机工作原理 (4) 3电动机的运行维护 (6) 3.1电动机启动前的准备 (6) 3.2起动时注意的问题 (7) 3.3电动机运行中的监视 (7) 3.3.1监视电动机的温度 (7) 3.3.2 监视电动机的电流 (8) 3.3.3 监视电动机的电压 (8) 3.4电动机运行中的注意事项 (8) 4 电动机的定期检查和保养 (9) 5 对电动机轴电流的分析及防范 (10) 小结 (12) 参考文献 (13) 致谢 (14)
摘要 近几十年来,随着电力电子技术、微电子技术及现代控制理论的发展,中、小功率电动机在工农业生产及人们的日常生活中都有极其广泛的的应用。特别是乡镇企业及家用电器的迅速,更需要大量的中小功率电动机。由于这种电动机的发展及广泛的应用,它的使用、保养和维护工作也越来越重要。本文主要介绍了电动机技术发展及现状、工作原理、电动机的运行维护。 关键词:技术现状工作原理运行维护
1前言 1.1电动机技术发展及现状 电机是利用电磁感应原理工作的机械。随着生产的发展而发展的,反过来,电机的发展又促进了社会生产力的不断提高。从19世纪末期起,电动机就逐渐代替蒸汽机作为拖动生产机械的原动机,一个多世纪以来,虽然电机的基本结构变化不大,但是电机的类型增加了许多,在运行性能,经济指标等方面也都有了很大的改进和提高,而且随着自动控制系统和计算机技术的发展,在一般旋转电机的理论基础上又发展出许多种类的控制电机,控制电机具有高可靠性﹑好精确度﹑快速响应的特点,已成为电机学科的一个独立分支。 它应用广泛,种类繁多。性能各异,分类方法也很多。电机常用的分类方法主要有两种:一种是按功能用途分,可分为发电机﹑电动机,变压器和控制电机四大类。电动机的功能是将电能转换成机械能,它可以作为拖动各种生产机械的动力,是国民经济各部门应用最多的动力机械,也是最主要的用电设备,各种电动机消耗的电能占全国总发电量的60%~70%。另一种分类方法是按照电机的结构或转速分类,可分为变压器和旋转电机.根据电源电流的不同旋转电机又分为直流电机和交流电机两大类.交流电机又分为同步电机和异步电机。 在现代化工业生产过程中,为了实现各种生产工艺过程,需要各种各样的生产机械。拖动各种生产机械运转,可以采用气动,液压传动和电力拖动。由于电力拖动具有控制简单﹑调节性能好﹑耗损小﹑经济,能实现远距离控制和自动控制等一系列优点,因此大多数生产机械都采用电力拖动。 按照电动机的种类不同,电力拖动系统分为直流电力拖动系统和交流电力拖动系统两大类。 纵观电力拖动的发展过程,交,直流两种拖动方式并存于各个生产领域。在交流电出现以前,直流电力拖动是唯一的一种电力拖动方式,19世纪末期,由于研制出了经济实用的交流电动机,致使交流电力拖动在工业中得到了广泛的应
PES331 3-Phase Brushless DC Motor Controller 10F-2, No. 1, Sec. 2, Dong-Da Road, Hsin-Chu 300, Taiwan, R.O.C. TEL: 886-3-532-7598 + https://www.doczj.com/doc/3018139224.html, Key Features: Support 3-Phase Brushless DC motor with hall IC interface Applications for electric screwdriver, electric drill and electric tooling Programmable motor phase sequence Automatically stop after lockup Re-lockup protection Over current protection 5V operating voltage Pin Diagram and Pin Description PWM_BH DIR_IN PWM_AL PWM_CL AVDD VDD HALL_A HALL_C NC2 PWM_CH PWM_BL PWM_AL START_IN GND VBus AGND CUR_SEN T_CMD NC1 HALL_B PES331(SSOP20-150mil) Pin No. Pin Name I/O Description 1 PWM_CH Output C output signal to control the high side of motor driver 2 PWM_AL Output A output signal to control the low side of motor driver 3 PWM_BL Output B output signal to control the low side of motor driver 4 START_IN Input Start to operate 5 GND - Ground 6 AGND - Analog Ground 7 T_CMD Input Clutch signal Input to set the required torque 8 CUR_SEN Input Analog input to sense motor current
直流无刷电机驱动技术的研究 摘要 随着现代电力电子技术的发展和永磁材料性能的不断提高,无刷直流电动机的系统在高性能运动控制领域越来越受到重视。无刷直流电动机既具有直流电动机运行效率高、调速性能好、无励磁损耗等诸多特点,又具备交流电动机的运行可靠、结构简单、维护方便等一系列优点,在国民经济各个领域的应用日益普及。 本文在对无刷直流电动机控制系统的发展及应用综述的基础上,详细的介绍了无刷直流电动机的基本结构、工作原理和运行特性,并给出了其数学模型。简述了无刷直流电动机的控制策略,并分析了无位置传感器控制技术的原理和方法。然后对无刷直流电动机双闭环控制系统的硬、软件设计作了详细论述。系统以 TI 公司的 TMS320LF2407 芯片为控制核心,分析了 PWM 信号的产生分配情况,给出反电动势过零点、速度及电流等检测电路设计,并以 IR2130 作为驱动芯片设计了无刷直流电动机的驱动电路,采用三段式起动方式来起动电动机。系统的软件采用模块化设计方法,主要包括初始化程序、起动子程序、换相子程序、ADC 中断服务程序等。最后运用 SIMULINK 建立了无刷直流电动机控制系统的仿真模型,并对给定实例进行仿真。 本论文所述无刷直流电动机控制系统的设计方案,可以获得良好的速度控制性能,而且 DSP 技术不仅使系统获得了高精度,高可靠性,还简化了系统结构。: 关键词:无刷直流电动机 PWM 控制无位置传感器仿真
Abstract With the development of power electronics technology and ceaseless advance of permanent magnet material, Brushless DC motor (BLDCM) is more and more attention in the field of control. BLDCM widely used in the various fields of the national economy because this motor not only loss etc. but also motor for reliable operation, simple structure and easy maintenance etc. On the basis of the summary for developments and applications of BLDCM control system,the thesis introduces the structure, running principle, operational characteristics and mathematical model of BLDCM. It outlines BLDCM control strategy, and discusses the principles and methods of the control technology with no position sensor detection. Then the of the double closed loop control system is dissertated in detail.The controller of the of PWM signals and designs the circuit of BEMF-zero-crossing, velocity and current detection. This system chooses syllogism jump-start motor. Besides, the drive circuit of the BLDCM is designed with IR2130. System software is modular in design methods, Including initialization, starting, commutation subroutine, ADC interrupt service procedures. Finally, it established a BLDCM control system simulation model by SIMULINK, and simulate to the case model.
电机数学模型 以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。为了便于分析,假定: a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。 则三相绕组的电压平衡方程可表示为: 错误!未找到引用源。(1) 式中:错误!未找到引用源。为定子相绕组电压(V);错误!未找到引用源。为定子相绕组电流(A);错误!未找到引用源。为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。 三相绕组为星形连接,且没有中线,则有 错误!未找到引用源。(2) 错误!未找到引用源。(3) 得到最终电压方程: 错误!未找到引用源。(4) e c c 图.无刷直流电机的等效电路 无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比 错误!未找到引用源。(5) 所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°
电角度,两者应严格同步。由于在任何时刻,定子只有两相导通,则:电磁功率可表示为: 错误!未找到引用源。(6) 电磁转矩又可表示为: 错误!未找到引用源。(7) 无刷直流电机的运动方程为: 错误!未找到引用源。(8) 其中错误!未找到引用源。为电磁转矩;错误!未找到引用源。为负载转矩;B为阻尼系数;错误!未找到引用源。为电机机械转速;J为电机的转动惯量。 传递函数: 无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示: 图2.无刷直流电机动态结构图 由无刷直流电机动态结构图可求得其传递函数为: 式中: K1为电动势传递系数,错误!未找到引用源。,Ce 为电动势系数; K2为转矩传递函数,错误!未找到引用源。,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,错误!未找到引用源。,G 为转子重量,D 为转子直径。基于MATLAB的BLDC系统模型的建立 在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,
无刷直流电机驱动 James P. Johnson, Caterpiller公司 本章的题目是无刷直流电动机及其驱动。无刷直流电动机(BLDC)的运行仿效了有刷并励直流电动机或是永磁直流电动机的运行。通过将原直流电动机的定子、转子内外对调—变成采用包含电枢绕组的交流定子和产生磁场的转子使得该仿效得以可能。正如本章中要进一步讨论的,输入到BLDC定子绕组中的交流电流必须与转子位置同步更变,以便保持磁场定向,或优化定子电流与转子磁通的相互作用,类似于有刷直流电动机中换向器、电刷对绕组的作用。该原理的实际运用只能在开关电子学新发展的今天方可出现。BLDC电机控制是今天世界上发展最快的运动控制技术。可以预见,随着BLDC的优点愈益被大家所熟知且燃油成本持续增加,BLDC必然会进一步广泛运用。 2011-01-30 23.1 BLDC基本原理 在众文献中无刷直流电动机有许多定义。NEMA标准《运动/定位控制电动机和控制》中对“无刷直流电动机”的定义是:“无刷直流电动机是具有永久磁铁转子并具有转轴位置监测来实施电子换向的旋转自同步电机。不论其驱动电子装置是否与电动机集成在一起还是彼此分离,只要满足这一定义均为所指。”
图23.1 无刷直流电机构形 2011-01-31 若干类型的电机和驱动被归类于无刷直流电机,它们包括: 1 永磁同步电机(PMSMs); 2 梯形反电势(back - EMF)表面安装磁铁无刷直流电机; 3 正弦形表面安装磁铁无刷直流电机; 4 内嵌式磁铁无刷直流电机; 5 电机与驱动装置组合式无刷直流电机; 6 轴向磁通无刷直流电机。 图23.1给出了几种较常见的无刷直流电机的构形图。永磁同步电机反电势是正弦形的,其绕组如同其他交流电机一样通常不是满距,或是接近满距的集中式绕组。许多无刷直流电
直流电机控制电路 摘要: 随着时代的发展,数字电子技术已经普及到我们生活,工作,科研,各个领域,此文将介绍一种直流电机,详细阐述了用单片机输出口所给占空比的不同实现电机的调速的设计方法;着重讨论L298用于电机驱动时特有的优势。直流电机调速具有相当的实际意义。依据其调速的基本理论,本电路由模拟电源、控制电路、显示电路、驱动电路四部分组成。准确说就是模拟电源提供各个芯片电源、数码管、驱动L298所需电压;显示电路用于显示电动机转动时的速度大小及正反转所表示的代码。与传统的电动机调速相比具有操作方便,以及其输出速度大小采用数码显示的特点。文章中介绍了Protel 99发展及特点。直流电动机的工作原理、基本组成环节,电路分析、特殊元器件简介,设计方案的提出,更进一步说明了这类电机的好处。着重利用软件Protel绘制出电路原理图。讨论了目前研究工作中存在的问题,并对其发展的方向进行了展望,给出了一些个人的观点。 关键词: 单片机AT89C51 ;驱动L298;555定时器;直流电机; DC motor control circuits Abstract: Along with the development of the ages, the numerical electronics technique has already make widely available to our life, work, research, each realm, this text will introduce a kind of DC motor control circuits。Elaborated with a microcontroller outputs are different to the duty cycle of the motor speed control circuit design; Focus on L298 for motor drive at the unique advantage,and DC Motor Speed Control has considerable practical significance. According to its governor's basic theory, the power supply circuit from analog control circuits, display circuit, the driving circuit four components. Is that accurate simulation of power supply for each chip, digital control, drives L298 required voltage; Show circuit for the motor rotation speed and size reversion expressed by the code. With the traditional motor speed compared with convenient operation and the size of the output speed digital display features. DC motor principle, the basic components, circuit analysis, special briefings components, design program, is further illustrated by the benefits of these motors. Protel software focused on the use of mapping circuit schematics. Discussion of the current research work is the problem and the direction of its development of the prospect, give some personal views.
文献综述 电气工程及自动化 无刷直流电机控制器的综述 摘要:实现由专用集成芯片及外围电路构成的一种体积小、结构紧凑、调试方便的无刷 直流电机控制器,实现电机的正反转,并分析了各部分的电路结构。 关键词: MC33035; MC33039;无刷直流电机;控制器; 1引言 无刷直流电机是随着大功率开关器件、专用集成电路、稀有永磁材料、微机、新型控制理论及电机理论的发展而迅速发展起来的一种新型电动机,它比交流电动机的结构简单、运行可靠、维护方便等优点,又具备直流电动机运行效率高、无励磁损耗、调速性能好等特点,因此在当今国民经济的各个领域(如医疗器械、仪器仪表、化工、轻纺以及家用电器等方面) 的应用日益普及。 2无刷电机的控制结构及原理 所谓无刷直流电动机是利用半导体开关电路和位置传感器代替电刷和换向器的直流电动机,也就是,它是把电刷与换向器的机械整流变换为霍尔元件与半导体功率开关元件的电子整流。无刷直流电机由转子和定子两部分组成,转子用永磁材料制成,构成永磁磁极,定子由绕组和铁芯组成,定子铁芯由导磁硅铁片迭压而成,其周上均匀分布的槽中嵌放有很多相电枢绕组。直流无刷驱动器包括电源部及控制部:电源部提供三相电源给电机,控制部分需要转换输入电源频率。 图一 电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先用换流器将直流
电压转换成3 相电压来驱动电机,换流器一般由6个功率晶体管分为上臂(A+、B+、C+)臂(A-、B-、C-)连接电机作为控制流经电机线圈的开关。控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器作为之闭回路控制,同时也作为相序控制的依据。 要让电机转动起来,首先控制部就必须根据hall-sensor 感应到的电机转子目前所在位置,然后依照定子绕线决定开启(或关闭)换流器(inverter)中功率晶体管的顺序,如下(图二)inverter 中之AH、BH、CH(这些称为上臂功率晶体管)及AL、BL、CL(这些称为下臂功率晶体管),使电流依序流经电机线圈产生顺向(或逆向)旋转磁场,并与转子的磁铁相互作用,如此就能使电机顺时/ 逆时转动。当电机转子转动到hall-sensor 感应出另一组信号的位置时,控制部又再开启下一组功率晶体管,如此循环电机就可以依同一方向继续转动直到控制部决定要电机转子停止则关闭功率晶体管(或只开下臂功率晶体管);要电机转子反向则功率晶体管开启顺序相反。 图二 基本上功率晶体管的开法可举例如下: AH、BL 一组→AH、CL 一组→BH、CL 一组→BH、AL 一组→CH、AL 一组→CH、BL 一组,但绝不能开成AH、AL 或BH、BL 或CH、CL。此外因为电子零件总有开关的响应时间,所以功率晶体管在关与开的交错时间要将零件的响应时间考虑进去,否则当上臂(或下臂)尚未完全关闭,下臂(或上臂)就已开启,结果就造成上、下臂短路而使功率晶体管烧毁。当电机转动起来,控制部会再根据驱动器设定的速度及加/减速率所组成的命令(Command)与hall-sensor 信号变化的速度加以比对(或由软件运算)再来决定由下一组(AH、BL 或AH、CL 或BH、CL 或……)开关导通,以及导通时间长短。速度不够则开长,速度过头则减短,此部份工作就由PWM 来完成。PWM 是决定电机转速快或慢的方式,如何产生这样的PWM 才是要达到较精准速度控制的核心。高转速的速度控制必须考虑到系统的CLOCK 分辨率是否足以掌握处理软件指令的时间,另外对于hall-sensor信号变化的资料存取方式也影响到处理器效能与判定正确性、实时性。至于低转速的
电机与拖动基础 课程设计报告 设计题目: 学号: 指导教师: 信息与电气工程学院 二零一六年七月
直流无刷电机本体设计 1. 设计任务 (1) 额定功率 80N P W = (2) 额定电压310N U V ≤ (3) 电动机运行时额定转速 1000/min N n r = (4) 发电机运行时空载转速max 6000/min n r = (5) 最大允许过载倍数 2.5λ= (6) 耐冲击能力21500/m a m s = (7) 机壳外径42D mm ≤ 设计内容: 1. 根据给定的技术指标,计算电机基本尺寸,包括:定子铁心外径、定子 铁心内径、铁心长度等。 2. 磁路计算,包括极对选择、磁钢选型、磁钢厚度、气隙长度等方面计算。 3. 定子绕组计算,包括定子绕组形式、定子槽数、绕组节距等计算。 2. 理论与计算过程 2.1 直流无刷电机的基本组成环节 直流无刷电动机的结构原理如图2-1-1所示。它主要由电机本体、位置传 感器和电子开关线路三部分组成。电机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,……)组成。图中的电机本体为三相电机。三相定子绕组分别与电子开关线路中相应的功率开关器件连接,位置
传感器的跟踪转子与电动机转轴相连接。 当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相 互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。 因此,所谓直流无刷电机,就其基本结构而言,可以认为是一台由电子开关 线路、永磁式同步电机以及位置传感器三者组成的“电动机系统”。其原理框图如图2-1-2所示。 图2-1-1 直流电动机的工作原理图 图2-1-2 直流无刷电机的原理框图 直流电源 电动机 位置传感器 开关电路
1、绪论 1.1课题背景 直流电动机分为有换向器和无换向器两大类。直流电动机调速系统最早采用恒定直流电压给直流电动机供电,通过改变电枢回路中的电阻来实现调速。这种方法简单易行、设备制造方便、价格低廉;但缺点是效率低、机械特性软,不能得到较宽和平滑的调速性能。该法只适用在一些小功率且调速范围要求不的场合。30年代末期,发电机、电动机系统的出现才使调速性能优异的直流电动机得到广泛应用。这种控制方法可获得较宽的调速范围、较小的转速变化率和平滑的调速性能。但此方法的主要缺点是系统重量大、占地多、效率低及维修困难。近年来,随着电力电子技术的迅速发展,由晶闸管变流器供电的直流电动机调速系统已取代了发电机、电动机调速系统,它的调速性能也远远地超过了发电机、电动机调速系统。特别是大规模集成电路技术以及计算机技术的飞速发展,使直流电动机调速系统的精度、动态性能、可靠性有了更大的提高。电力电子技术中IGBT等大功率器件的发展正在取代晶闸管,出现了性能更好的直流调速系统。 长期以来,仿真领域的研究重点是仿真模型的建立这一环节上,即在系统模型建立以后要设计一种算法,以使系统模型等为计算机所接受,然后再编制成计算机程序,并在计算机上运行。因此,各种仿真算法和仿真软件相继诞生了。 由于对模型建立和仿真实验研究较少,因此建模通常需要很长时间,同时仿真结果的分析也必须依赖有关专家,而对决策者缺乏直接的指导,这样就大大阻碍了仿真技术的推广应用。 MATLAB提供的动态系统仿真工具Simulink,则是众多仿真软件中最强大、最优秀、最容易使用的一种。它有效的解决了以上仿真技术中的问题。在Simulink 中,对系统进行建模将变的非常简单,而且仿真过程是交互的,因此可以很随意的改变仿真参数,并且立即可以得到修改后的结果。另外,使用MATLAB中的各种分析工具,还可以对仿真结果进行分析和可视化。 Simulink可以超越理想的线性模型去探索更为现实的非线性问题的模型,
无刷电机之无感方案控制难点解析 无刷无感控制在实际应用中极为广泛,人们对它的研究也尤为以久,它的控制难点主要有两点:第一,电机的启动;第二,转子位置的检测。 对于高压无感方案来讲,除了软件上的难点之外,硬件设计也不容忽视,如硬件设计稍有不当,会导致整个控制板的干扰很大,从而加大了整个方案成功的难度。 以下我们主要针对低压的无感方案进行讨论,对于低压的无感方案来讲,市面上的硬件设计都大同小异,检测转子的位置的方式也都几乎都采用反电动势检测法。 1、为什么无感方案电机的启动如此困难? 对于无刷电机来讲,电机的运转是靠电子开关控制换相,那么想要电机正常高效的运转,就必须要知道转子的位置之后,才能正常换相,问题来了,电机没有传感器,也没有转起来,所以转子的位置就不得而知了,所以无感的启动就要自转启动,先让电机以一定的速率自转,在电机自动的过程中,我们通过检测反电动势来得知转子的位置,从而得到正确的换相的相位。 电机的自启动说起来简单做起来难,本人在调试众多无感方案的过程中,总结出以下几点经验供参考: (1)、首先是自转,自转一定要让电机运转顺畅,不能打抖,同时也不能造成大电流。这是启动成功的非常关键的一步。具体如何达到这个效果,就要各位在调试的过程中调节PWM占空比以及换相时间的长短了。 (2)、启动步数不能太少,也不要过多,一般十来步就够了,等电机运行十来步后开始检测反电动势,当检测到正确的反电动势后这时候电机就正常运转起来了。 2、如何检测反电动势 检测反电动势的方法有两种,第一是用单片机内部AD采样反电动势信号来进行比较,第二是用比较器直接比较。这两种方法思路都是一样,但依个人的经验来看,用比较器的方案更可靠,性能更好,特别是电机转速要求非常高时,用AD采样方法几乎是行不通的。 虽然用比较器方案更有优势,可为何在市面上用AD采样的方式也非常常见?这个主要是因为产品成本的问题。用比较器方案做,要不在外部加一个比较器IC,不仅增加成本,同时也增大PCB 的布板空间,其二就是找一个内部带AD的单片机,而这种单片机相对来讲通常价格偏高一些。下图为检测反电动势的电路参考图:
直流无刷电动机研发设计毕业论文 目录 中文摘要 (Ⅰ) Abstract (Ⅱ) 第一章绪论 (1) 1.1 课题的背景及研究意义 (1) 1.2 直流无刷电机控制系统的研究 (3) 1.3 PCI总线的应用 (7) 1.4 课题研究的主要容 (9) 1.5 论文的组织结构 (10) 第二章直流无刷电机控制原理 (11) 2.1 无刷直流电机的结构 (11) 2.2 无刷直流电机工作原理 (13) 2.3 无刷直流电机PID调速原理 (17) 第三章系统硬件设计 (21) 3.1 PCI运动卡控制电机的实现方法 (21) 3.2 硬件总体设计思想 (22) 3.3 数据采集卡及接线端子板 (23) 3.4 直流电机及其驱动器 (25)
3.4硬件连线示意图 (27) 第四章系统软件设计 (28) 4.1 软件总体设计思想 (28) 4.2 图形化编程软件LabVIEW简介 (29) 4.3 PCI控制卡的各子程序设计 (30) 4.3.1 转速控制程序 (30) 4.3.2 转速检测程序 (36) 4.3.3 PID控制程序 (40) 4.4 总程序框图 (41) 第五章实验与结论 (43) 5.1 硬件的安装与测试 (43) 5.2 软件测试 (45) 5.2.1 转速控制程序测试 (45) 5.2.2 转速检测程序测试 (46) 5.2.3 PID程序测试 (48) 5.3 结果分析 (50) 第六章总结与展望 (52) 6.1本文工作总结 (52) 6.2 研究展望 (52) 致谢 (54) 参考文献 (55)
附录一中文翻译 (57) 附录二外文原文 (67)
图1 第2章 无刷直流电机的驱动原理 2.1 驱动方式的理论分析 一、主要器件MOSFET MOSFET 又称金属-氧化物半导体场效应晶体管,可分为N 型和P 型两种,又被称为 NMOSFET 与PMOSFET 。 如图1所示,一块P 型硅 半导体材料作衬底, 在其面上扩散了两个N 型区,再在上面覆盖一层二氧 化硅(SiO2)绝缘层,最后在N 区上方用腐蚀的方法 做成两个孔,用金属化的方法分别在绝缘层上及两个 孔内做成三个电极:G(栅极)、S (源极)及D (漏极), 如图所示。在驱动器上用到的MOSFET 是在其上反并 联一个二极管,该二极管通常被称为寄生二极管。由 于添加了二极管的缘故,从而使其没有了反向电压阻 断的能力。一般使用时在栅源极间施加一个-5V 的反向偏执电压,目的是为了保证是器件导通,噪声电压必须阈值门控(栅 极)电压和负偏置电压之和。 MOSFET 的使用方法和三极管的使用方法几乎类似,都是采用小电 流的方式来控制大电流,这在模拟电路中经常用到。如图2所示,在 无刷电机驱动器中使用MOSFET 主要是在MOSFET 的栅源极施加一个寄 生二极管。 二、单相半波逆变器原理 如图3所示是单相半波逆变器的原理图。对其工 作状态分析如下: 第一个工作状态,v1导通,负载电压等于Ud/2,从而 使负载电流与电压同向。 第二个工作状态,v2关短后,负载电流流向vd2,使 得负载上的电压变为-Ud/2。但随着时间的推移会使 负载的电流最终变为0。 第三个工作状态,v2导通,使得负载中出现了负电 压和负电流。 第四个工作状态,v2关断造成vd2正向偏置,得负 载电压变为Ud/2。 如果电压为横坐标u ,电流为竖坐标i 的话,那 么通过上面四个状态就可以是电流和电压在四个象限内轮流工作。因此,采用一定的方法通过控制v1 和v2的导通时间就可以达到控制负载上电流和电压按照一定的频率来轮换着工作。 但是上面的变换有一些缺点。例如,在任何时刻加载在负载上的电压都是全部电压的一半。假如咋某个时刻对于功率额定的器件,电压减半后会使电流变为原来的两倍,同时又欧姆定律可知这时的发热会变为原来的次方倍。这对于器件来说会造成更大的风险。另外电压只能在最大电压的一半,没办法为0V ,那就会是器件造成更大的波纹度。 图2 图3 图2
毕业设计/论文 开题报告 课题名称基于PROTEUS的直流电机调速系 统仿真设计 类别毕业设计 系别机电与自动化学院 专业班电气工程及其自动化0706班 姓名加珣 评分 指导教师吴雯 华中科技大学武昌分校
华中科技大学武昌分校学生毕业设计开题报告学生姓名加珣学号20071131259专业班级电气0706 系别机电与自动化 学院 指导教师吴雯职称工程师 课题名称基于PROTEUS的直流电机调速系统仿真设计 1课题设计的目的和意义 1.1课题设计的目的 Proteus软件是英国Labcenter electronics公司出版的EDA工具软件,从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PCB设计,真正实现了从概念到产品的完整设计。 直流电机虽不需要其它的设备来帮助调速,但自身的结构复杂,制造成本高;在大功率可控晶闸管大批量使用之前,直流电动机用于大多的调速场合。直流调速系统具有较大的起动转矩和良好的起、制动性能以及易于在宽范围内实现平滑调速,至今都是自动调制系统的主要形式。电机的控制部分已经由模拟控制逐渐让位于以单片机为主的微处理器控制。 采用微处理器控制,使整个调速系统的数字化程度,智能化程度有很大改观;采用微处理器控制,使调速系统在结构上简单化,可靠性提高,操作维护变得简捷,电机稳态运行时转速精度等方面达到较高水平。简单的微处理器控制电机,只需利用微处理器控制继电器、电子开关元器件,使电路开通或关断就可实现对电机的控制。对于复杂的微处理器控制电机,则要利用微处理器控制电机的电压、电流、转矩、转速、转角等,使电机按给定的指令准确工作。 1.2课题设计的意义 直流调速系统的发展得力于微电子技术、电力电子技术、传感器技术、永磁材料技术、自动控制技术和微机应用技术的最新发展成就。功率器件控制条件的变化和微电子技术的使用也使新型的电动机控制方法能够得到实现。随着单片机的发展,数字化直流PWM调速系统在工业上得到了广泛的应用,控制方法也日益成熟。 它对单片机的要求是:具有足够快的速度;有PWM口,用于自动产生PWM波;有捕捉功能,用于测频;有A/D转换器、用来对电动机的输出转速、输出电压和电流的模拟量进行模/数转换;有各种同步串行接口、足够的内部ROM和RAM,以减小控制系统的无力尺寸;有看门狗、电源管理功能等。因此该实验中选用单片机AT89C51。通过设计基于AT89C51单片机的直流PWM调速系统并调试得出结论,在掌握
南阳理工学院 本科生毕业设计(论文) 学院:电子与电气工程学院 专业:电子信息工程 学生: 指导教师:薛晓 完成日期2014 年 5 月
南阳理工学院本科生毕业设计(论文) 直流无刷电机的控制系统设计与实现Design of Brushless DC Motor Controller and Implementation 总计: 21 页 表格: 2 个 插图: 27 幅
南阳理工学院本科毕业设计(论文) 直流无刷电机控制系统设计与实现 Design of Brushless DC Motor Controller and Implementation 学院(系):电子与电气工程学院 专业:电子信息工程 学生姓名: 学号: 指导教师(职称):薛晓(讲师) 评阅教师: 完成日期: 南阳理工学院 Nanyang Institute of Technology
直流无刷电机控制系统设计与实现 电子信息工程专业 [摘要]直流无刷无感直流电机具有体积小、调速性能好、重量轻、效率高等优点,目前在很多领域得到了的应用。本课题设计的是无刷无感直流电机的控制,包括无刷直流电机无位置传感器控制系统和无刷无感直流电机的基本结构、工作原理、数学模型等理论进行了分析和论述,为直流电机的控制提供理论依据。用matlab guide设计了上位机界面来进行PID参数的整定。 本课题设计了直流无刷电机的控制系统并进行了调试。用STM32进行控制。实验结果表明设计的转子位置检测可以很好的检测电机的反电势过零点信号,进而保证电机的正确换相和稳定运行。整个系统可以控制无刷无感直流电机顺利启动,并通过滑动变阻器实现电机的调速。 [关键词] 无刷直流电机;电机驱动;换相;反电势 Design of Brushless DC Motor Controller and Implementation Electronic Information Engineering Specialty Abstract:The brushless DC motors have the advantage of small,good debugging performance,low weight,and high efficiency. So it has been widely used now. And this restricts the industrial drive applications,After the attachment with sensorless control. This paper mainly reserches the sensorless control technology for BLDCM,designs and control BLDCM without position sensor. I use MATLAB guide to debug PID parameter. designing a controller of brushless DC motor and do some experiments for this control system. I use the STM32 MCU as the core microprocessor of hardware system.The results of the experiment show that the rotor position detection system can perfectly detect the location of back-EMF zero-crossing signal,and ensuring the correct motor commutation and stable operation.The whole control system can control the brushless DC motor stating smoothly,and use the Sliding rheostat to achieve speed control. Key words:Brushless dc motor;motor drive;commutation; back-emf