实验 等截面悬臂梁模态测试实验
一、 实验目的
1. 熟悉模态分析原理;
2. 掌握悬臂梁的测试过程。
二、 实验原理
1. 模态分析基本原理
理论上,连续弹性体梁有无限多个自由度,因此需要无限多个连续模型才能描述,但是在实际操作中可以将连续弹性体梁分为n 个集中质量来研究。简化之后的模型中有n 个集中质量,一般就有n 个自由度,系统的运动方程是n 个二阶互相耦合(联立)的常微分方程。这就是说梁可以用一种“模态模型”来描述其动态响应。
模态分析的实质,是一种坐标转换。其目的在于把原在物理坐标系统中描述的响应向量,放到所谓“模态坐标系统”中来描述。这一坐标系统的每一个基向量恰是振动系统的一个特征向量。也就是说在这个坐标下,振动方程是一组互无耦合的方程,分别描述振动系统的各阶振动形式,每个坐标均可单独求解,得到系统的某阶结构参数。
多次锤击各点,通过仪器记录传感器与力锤的信号,计算得到第i个激励点与定响应点(例如点2)之间的传递函数 ω ,从而得到频率响应函数矩阵中的一行
频响函数的任一行包含所有模态参数,而该行的r 阶模态的频响函数 的比值,即为r 阶模态的振型。 2. 激励方法
为进行模态分析,首先要测得激振力及相应的响应信号,进行传递函数分析。传递函数分析实质上就是机械导纳,i 和j 两点之间的传递函数表示
[]
∑==N
r iN r
i r
i r H H H 1
21
...
[]
Nr r r N
r r
r r ir
k c j m ???ωω? (2112)
∑
=++-=[]{}[]
T
r ir N
r r iN i i Y H H H ??∑==1
21
...
在j点作用单位力时,在i点所引起的响应。要得到i和j点之间的传递导纳,只要在j点加一个频率为ω的正弦的力信号激振,而在i点测量其引起的响应,就可得到计算传递函数曲线上的一个点。如果ω是连续变化的,分别测得其相应的响应,就可以得到传递函数曲线。
根据模态分析的原理,我们要测得传递函数矩阵中的任一行或任一列,由此可采用不同的测试方法。要得到矩阵中的任一行,要求采用各点轮流激励,一点响应的方法;要得到矩阵中任一列,采用一点激励,多点测量响应的方法。实际应用时,单点响应法,常用锤击法激振,用于结构较为轻小,阻尼不大的情况。对于笨重、大型以及阻尼较大的系统,则常用固定点激振的方法,用激振器激励,以提供足够的能量。
3.变时基方法的应用
在进行瞬态激励信号与响应信号采样时,激励与响应之间,特征时间与特征频率的差异太大,激励是mS级的,响应是几百mS级到秒级。如果采用等时基传递函数做瞬态激励传函分析时,就存在频率分辨力(采样频率越低,分辨力越高)和时域波形精度(采样频率越高,时域波形精度越高)这一对无法克服的矛盾。由于脉冲激励信号作用时间较短,为了确保频率分辨力,采样频率不能太高,从而导致以下几种情况:⑴采到的激励信号偏大;⑵采到的激励信号偏小;⑶激励信号没有采上。计算出来的导纳值重复性差,相位不准。因此在变时基提出之前,大型结构无法用锤击法测出模态,只能使用火箭激励,因为火箭激励时加长了激励时间,且它可以产生方波激励信号。
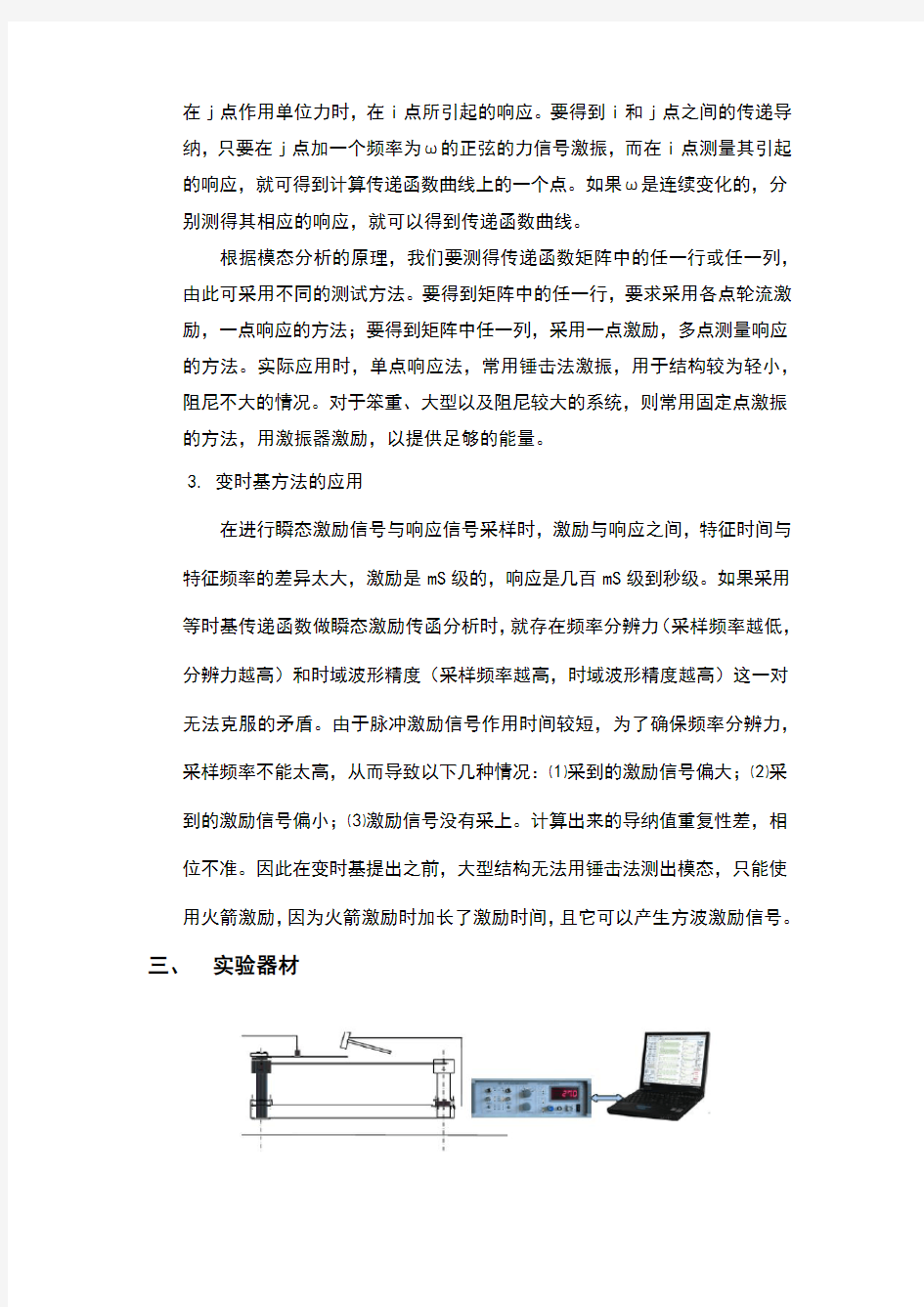
三、实验器材
图1 振动测试试验台的组成及连接示意图
本次实验设备如上图1所示,其中使用的器材主要包括四部分,具体如下。
1.振动测试试验台;
2.加速度传感器,要求绝缘,防止电荷流动;
3.力锤,装有压力传感器,测量输入的激励;
4.INV1601型振动与控制教学实验系统软件。
四、实验内容及步骤
1.测点确定
此梁在y、z方向尺寸和x方向(尺寸)相差较大,可以简化为杆件,所以只需在x方向顺序布置若干敲击点即可(本例采用多点移步敲击、单点响应方法),敲击点的数目视要得到的模态的阶数而定,敲击点数目要多于所要求的阶数,得出的高阶模态结果才可信。本次试验中在x方向把梁分成十等份,即可以布十一个测点。本次试验只求解了前四阶模态,因此敲击点足够。
2.结构生成
按照图1安装仪器设备,仪器连接好之后,启动DASP2006标准版软件,选择教学模态实验模式。在左侧信息窗口中选择结构并设置结构参数。本实验中梁长230mm、宽40mm、厚3mm,在长方向上等分10份,在宽和厚两方向上不划分。设置完成后生成悬臂梁模型如下图2。其中1点是约束位置。
图2 悬臂梁结点分布示意图
3.参数设置与采样
在左侧信息窗口中选择采样,设置采样参数。其中具体如下:选择加速
度传感器类型;总测点数11个;每个测点采样3次;触发电平200mv;变时基倍数4;采样频率120000Hz;采样长度2k;程控倍数为1。
因为本实验中梁振动集中在低频,所以选择塑料头来敲击。用力敲击各个测点,观察有无波形,如果有一个或两个通道无波形或波形不正常,就要检查仪器连接是否正确、导线是否接通、传感器、仪器的工作是否正常等等,直至示波波形正确为止。正式测试时应该适当调整放大倍数并使用适当的力来激励,防止激励过载或过小。标定之后就可以进行测试了。INV1601B型振动教学试验仪的输出增益值。
参数设置完后,选择自动增加测点号,按左窗下面的开始采样按钮,进入触发变时基采样状态,等待触发,并提示当前采样的点号和触发次数。根据提示从第一点按设定的触发次数测试到最后一个测点。自动记录下每次测试结果。测试过程中尽量避免连击现象,如果有连击现象,按中止采样按钮,改变测点号重新开始采样,将覆盖原来数据。
4.分析
由于直接使用软件自动计算的模态误差太大,本实验中为了减小误差,每一个测点都采用手动分析,本文只是简述过程并介绍关键步骤的工作。
1)调整采样数据
要选择正确的测点编号,并在指数窗口调整对力信号处理的区间,使力信号完全处于该区间内。
2)传函分析
直接点击“进行传函计算”按钮,进行分析。
3)模态拟合
选取峰值作为模态,注意区间应该包括峰值,如下图3所示。
图3 手动选取模态示意图
4)振型编辑
选择质量归一法。
5)动画显示
五、实验结果
1.各阶模态参数记录
表1 等截面悬臂梁各阶模态参数
2.各阶模态振型投影图
(a)第一阶振型投影图 (b) 第二阶振型投影图
(c) 第三阶振型投影图 (d)第四阶振型投影图
(e)前四阶振型投影图
图4 等截面悬臂梁各阶模态振型投影图
六、分析与讨论
本实验中误差相对较大,个人认为可能的原因如下两点。其他更深入的原因还需要进一步的学习研究。
1.由于梁的刚度不够,自由端受重力影响,已经产生了较大的挠度,影
响实验结果;
2.由于使用锤击法激励,激励的效果不是非常理想,特别是在自由端非
常难实现合理的激励。
附:
模态分析报告工程信息:
名称: ABC2# 日期:2016-10-20 时间:15:42:14 拟合方法: 复模态单自由度响应类型:加速度
几何结构和节点设置
图(1) 模态几何结构和节点分布图模态频率和阻尼
留数
第1阶:
第2阶:
第3阶:
表4: RESIDUES
第4阶:
表5: RESIDUES
第5阶:
表6: RESIDUES
第6阶:
模态质量、刚度和阻尼比
振型
第1阶:
表9: 振型
第2阶:
第3阶:
表11: 振型
第4阶:
表12: 振型
第5阶:
表13: 振型
第6阶:
表14: 振型
----------------------------------------------------------------------
单位: 报告人:
1.复习模态分析理论 1.1单自由度系统频响函数(幅频、相频、实频与虚频、品质因子等) 系统的脉冲响应函数h(t)与系统的频响函数H(ω)是一对傅里叶变换对,与系统的传递函数H(s)是一对拉普拉斯变换对。即有: i ()()e d t H h t t ωω-∞ =? -∞ 1i () ( )e d 2π t h t H ωωω -∞ =?-∞ ()()e d 0 st H s h t t -∞ =? 1 i () ( )e d i 2πi st h t H s σωσ+∞=? -∞ 复频率响应的实部 2 1(/)R e [()]22 2 [1(/) ](2/)n H n n ωωωωω ξωω-= -+ 复频率响应的虚部 2/Im [()]22 2 [1(/)](2/) n H n n ξωω ωωω ξωω =- -+ 单自由度系统频响函数的各种表达式及其特征1 (w )2H k m w j k η=-+,对频响函数特征的描述 采用的几种表达式 1)幅频图:幅值与频率之间的关系曲线 2)相频图:相位与频率之间的关系曲线 3)实频图:实部与频率之间的关系曲线 4)虚频图:虚部与频率之间的关系曲线 5)矢端轨迹图(Nyquist 图) 1.2单自由度结构阻尼系统频响函数的各种表达形式 频响函数的基本表达式:11111 ()22222100 H m k k m j k j j ωω ηωωηωη = = ?=? -+-+-Ω+ 频响函数的极坐标表达式:()|()|j H H e ?ωω=,w H () —幅频特性, a rc ta n 21η?? ? -= ? ? ?-Ω? —相频特性。 频响函数的直角坐标表达式: ()()() R I H H jH ωωω=+, ()() 211()222 1R H k ωη -Ω= ? -Ω+—实频特性, () 1()22 2 1I H k η ωη -=? -Ω+—虚频特性 频响函数的矢量表达式:()()()R I H H ωωω=+H i j 1.3单自由度结构阻尼系统频响函数各种表达式图形及数字特征 幅频特性:1|()|0H k ωη = 固有频率:0D ωω= 阻尼比:00 B A ω ωω ηω ω -?== 相频特性
篇一:模态分析实验报告 模态分析实验报告 姓名:学号:任课教师:实验时间:指导老师:实验地点: 实验1传递函数的测量 一、实验内容 用锤击激振法测量传递函数。 二、实验目的 1) 掌握锤击激振法测量传递函数的方法; 2) 测量激励力和加速度响应的时间记录曲线、力的自功率谱和传递函数; 3) 分析传递函数的各种显示形式(实部、虚部、幅值、对数、相位)及相干函 数; 4) 比较原点传递函数和跨点传递函数的特征; 5) 考察激励点和响应点互换对传递函数的影响; 6) 比较不同材料的力锤锤帽对激励信号的影响; 三、实验仪器和测试系统 1、实验仪器 主要用到的实验仪器有:冲击力锤、加速度传感器,lms lms-scadas ⅲ测试系统,具体型号和参数见表1-1。 仪器名称 型号 序列号 3164 灵敏度 2.25 mv/n 100 mv/g 备注比利时 丹麦 b&k 数据采集和分析系统 lms-scadas ⅲ 2302-10 力锤 加速度传感器 表1-1 实验仪器 2 、测试系统 利用试验测量的激励信号(力锤激励信号)和响应的时间历程信号,运用数字 信号处理技术获得频率响应函数(frequency response function, frf),得到系统的非参数模型。然后利用参数识别方法得到系统的模态参数。测试系统主要完成力锤激励信号及各点响应信号时间历程的同步采集,完成数字信号的处理和参数的识别。 测量分析系统的框图如图1-1所示。测量系统由振动加速度传感器、力锤和比利时lms公司scadas采集前端及modal impact测量分析软件组成。力锤及加速度传感器通过信号线与scadas采集前端相连,振动传感器及力锤为icp型传感器,需要scadas采集前端对其供电。scadas采集相应的信号和进行信号处理(如抗混滤波,a/d转换等),所测信号通过电缆与电脑完成数据通讯。图1-1 测试分析系统框图 四、实验数据采集 1、振动测试实验台架 实验测量的是一段轴,在轴上安装了3个加速度传感器,如图1-2所示,轴由四根弹簧悬挂起来,使得整个测试统的频率很低,基本上不会影响到最终的测试结果。整个测试系统如下图所示:a1 a 测点2测点3测点4 图1-2 测试系统图
《机械系统设计》 实验报告 姓名:马睿聪 班级:机械Z1317 学号:2013000384
实验一:采煤机的主功能及辅助功能 采煤机是一个集机械、电气和液压为一体的大型复杂系统,工作环境恶劣,如果出现故障将会导致整个采煤工作的中断,造成巨大的经济损失. 采煤机是实现煤矿生产机械化和现代化的重要设备之一.机械化采煤可以减轻体力劳动、提高安全性,达到高产量、高效率、低消耗的目的. 采煤机分锯削式、刨削式、钻削式和铣削式四种:采煤机是一个集机械、电气和液压为一体的大型复杂系统,工作环境恶劣,如果出现故障将会导致整个采煤工作的中断,造成巨大的经济损失.随着煤炭工业的发展,采煤机的功能越来越多,其自身的结构、组成愈加复杂,因而发生故障的原因也随之复杂.双滚筒采煤机综合了国内外薄煤层采煤机的成功经验,是针对我国具体国情而设计的新型大功率薄煤层采煤机. 采煤机的主要组成部分: 采煤机的类型很多,但基本上以双滚筒采煤机为主,其基本组成部分也大体相同。各种类型的采煤机一般都由下列部分组成。 (1)截割部 截割部的主要功能是完成采煤工作面的截煤和装煤,由左、右截割电机,左、右摇臂减速箱,左、右滚筒,冷却系统,内喷雾系统和弧形挡板等组成。截割部耗能占采煤机装机总功率的80%-90%,
因此,研制生产效率高和比能耗低的采煤机主要体现在截割部。 传动装置: 截割部传动装置的作用是将采煤机电动机的动力传递到滚筒上,以满足滚筒转速及转矩的要求;同时,还应具有调高功能,以适应不同煤层厚度的变化。 截割部的传动方式主要有一下几种: a)、电动机-摇臂减速箱-行星齿轮减速箱-滚筒 b)、电动机-固定减速箱-摇臂减速箱-滚筒 c)、电动机-固定减速箱-摇臂减速箱-行星齿轮减速箱-滚筒 d)、电动机-摇臂减速箱-滚筒螺旋滚筒: 螺旋滚筒是采煤机落煤和装煤的工作机构,对采煤机工作起决定性作用,消耗总装功机率的80%-90%。早期的螺旋滚筒为鼓型滚筒,现代采煤机都采用螺旋滚筒。螺旋滚筒能适应煤层的地质条件和先进的采煤方法及采煤工艺的要求,具有落煤、装煤、自开切口的功能。近些年来出现了一些新的截割滚筒,诸如滚刀式滚筒、直
目录 第1章测试的目的 (1) 第 2 章高层建筑结构现场动力特性测试方法 (3) 2.1概述 (3) 2.2 影响高层建筑动力测试的环境因素 (3) 2.3高层建筑结构脉动测试测点分类 (3) 2.3.1水平振动测点 (3) 2.3.2扭转振动测点 (4) 2.4测点及测站布置原则 (4) 2.4.1找好中心位置布置平移振动测点。 (4) 2.4.2在建筑物的两侧布置扭转测点 (4) 2.5 传感器布置的方法 (5) 第3章西安建筑科技大学XX大楼现场动力测试 (6) 3.1 结构概况 (6) 3.2 测试目的 (6) 3.4 测试仪器设备 (6) 3.5 测试方案 (6) 3.6 脉动过程记录 (7) 3.7结果分析 (9) 3.8 结论 (11) 参考文献 (12)
第1章测试的目的 高层建筑结构的动力特性指它的自振频率、振型及阻尼比.虽然这些动力特性可以通过理论计算求得,但通过测试所得的动力特性仍然具有重要意义。主要表现在以下几个方面: ①.检验理论计算 理论计算方法求结构的自振频率时存在误差。于在理论计算过程中,要先确定计算简图和结构刚度,而实际结构往往是比较复杂的,计算简图都要经过简化,常填充墙等非结构构件并不记入结构刚度,而且结构的质量分布、材料实际性能、施工质量等都不能很准确的计算。因此,计算周期与实测周期相比,往往相差很多,据统计,大约前者为后者的1.5--3倍。这样,如果直接采用理论计算的自振周期计算等效地震荷载,往往使内力及位移偏小,设计的结构不够安全。因此,理论周期要用修正系数加以修正。现场实测可以得到建筑物建成后实际的动力特性,因此是准确可靠的。所得数据可以与理论计算数据进行对照比较,验证理论计算,也可为设计类似的对于超高层建筑提供经验及依据。 ②.验证经验公式 通过实测手段对各种不同类型的建筑物进行测试以后,可归纳总结出结构周期的规律,得到计算结构振动周期的经验公式。在估算结构动力特性及估算地震作用时采用经验公式可快速得到结果,方便实用。由于实测周期大都采用脉动试验的方法得到,是反映结构在微小变形下的动力特性,得的周期都比较短,如果激振力加大,结构周期会加长。在地震作用下,随着地震烈度不同,房屋会有不同程度的开裂破坏,刚度降低,自振周期会变长。因此,完全按照脉动测试的周期来确定同类型结构的周期,将使计算等效地震力加大,设计偏于保守。所以由脉动方法得到的实测周期需要乘以修正系数,再计算等效地震力。在大量测试工作和积累了丰富资料的基础上,这个修正系数的大小视结构类型、填充墙的多少而定,大约在1.1-1.5之间。在给出经验公式时,计入这一修正系数,这样既可以简化计算,又与实际周期较为接近。 ③.为结构安全性评估及损伤识别提供依据 建筑结构的质量问题不容忽视,它是直接关系着千家万户的生命财产安全和安居乐业的大事,建筑结构的质量状态评估日益受到人们的重视。传统的经验性的评估方法存在许多缺陷和不足,静力检测结构的缺陷也有许多局限性。动力检测应用于整体结构的质量评估受到国内外学者的广泛关注。近10年来,国内外学者一直在寻找一种能适用于复杂结构整体质量评估的方法。目前,到
《机械结构实验模态分析》实验报告 开课实验室:汽车结构实验室 2019年月日 学院 姓名 成绩 课程 名称 机械结构实验模态分析 实验项目 名 称 机械结构实验模态分析 指导教师 教师评语 教师签名: 年 月 日 机械结构实验模态分析实验报告 一、实验目的和意义 模态分析技术是近年来在国内外得到迅速发展的一门新兴科学技术,广泛应用于航空、航天、机械制造、建筑、汽车等许多领域,在识别系统的动力学参数、动态优化设计、设备故障诊断等许多方面发挥了日益重要的作用。 本实验采用CCDS-1模态分析微机系统,对图1所示的框架结构进行分析。通过该实验达到如下目的: 212019 1817 16 1514 13121110 987 6 5 4 3 222120 20 202090 9090 90 90909090113 113 113 113 113 113 115 115 115 115 图1 框架结构图 详细了解CCDAS-1模态分析微机系统,并熟练掌握使用本系统的全过程,包括 了解测量点和激振点的选择。 了解模态分析实验采用的仪器,实验的连接、安装和调整。 1、 激励振时各测点力信号和响应信号的测量及利用这些测量信号求取传递函数,并分析影响传递 函数精度的因素。 2、 SSDAS-1系统由各测点识别出系统的模态参数的步骤。 3、 动画显示。 4、 灵敏度分析及含义。 通过CCDAS-1模态分析的全部过程及有关学习,能祥述实验模态的一般步骤。 通过实验和分析,大大提高综合分析能力和动手能力。
CCDAS-1系统模态分析的优缺点讨论并提出改进实验的意见。 二、测试及数据处理框图 加速度传感器 力传感器 脉冲锤 四个点由橡胶绳悬挂 1724 打印机 IBM PC 微型计算机 含AD板 CCMAS-1模态分析软件 双通道低 通滤波器 电荷放大器 电荷放大器 图2 测量及数据处理系统框图 三、实验模态分析的基本原理 对于一个机构系统,其动态特性可用系统的固有频率、阻尼和振型来描述,与模态质量和模态刚度一起通称为机械系统的模态参数。模态参数既可以用有限元的方法对结构进行简化得到,也可以通过激振实验对采集的振动数据进行处理识别得到。通过实验数据求取模态参数的方法就是实验模态分析。只要保证测试仪器的精度、实验条件和数据分析处理的精度就能获得高质量的模态参数。 一个线性系统,若在某一点j 施加激振力j F ,系统各点的振动响应为i X 1,2,...,i n =,系统任意两点的传递函数ij h 之间的关系可用矩阵表示如下: 11112122122212()... 0()...()...()...0n n j n n n nn x h h h x h h h F x h h h ωωωω?????? ???????????? =??? ??????????????? ??????M M M O M (1-1) 可记为:{}{}[]X H F = []H 称为传递函数矩阵。其中的任意元素ij h 可以通过激振实验得到 () () i ij j X h F ωω= ()i X ω,()j F ω分别表示响应i X 与激振力j F 的傅立叶变换。 测量方法是给系统施加一有限带宽频率的激振力(冲击也是一有限带宽激振力),同时测量系统的响应,将力和响应信号进行滤波,A/D 转换并离散采样,进行双通道FFT 变换,计算出激振力j F 与响应i X 之间的传递函数ij h 。 对测量的传递函数进行曲线拟和得到模态参数,一个多自由度系统曲线拟和传递函数的解析式为:* * 1 ()[]n ijk ijk ij k k k r r h S S P S P == - --∑ (1-3)
武汉理工大学 学生实验报告书 实验课程名称机械中的有限单元分析 开课学院机电工程学院 指导老师姓名 学生姓名 学生专业班级机电研 1502班 2015—2016 学年第2学期
实验一方形截面悬臂梁的弯曲的应力与变形分析 钢制方形悬臂梁左端固联在墙壁,另一端悬空。工作时对梁右端施加垂直向下的30KN的载荷与60kN的载荷,分析两种集中力作用下该悬臂梁的应力与应变,其中梁的尺寸为10mmX10mmX100mm的方形梁。 1.1方形截面悬臂梁模型建立 建模环境:DesignModeler 15.0。 定义计算类型:选择为结构分析。 定义材料属性:弹性模量为2.1Gpa,泊松比为0.3。 建立悬臂式连接环模型。 (1)绘制方形截面草图:在DesignModeler中定义XY平面为视图平面,并正视改平面,点击sketching下的矩形图标,在视图中绘制10mmX10mm的矩形。(2)拉伸:沿着Z方向将上一步得到的矩阵拉伸100mm,即可得到梁的三维模型,建模完毕,模型如下图1.1所示。 图1.1 方形截面梁模型 1.2 定义单元类型: 选用6面体20节点186号结构单元。 网格划分:通过选定边界和整体结构,在边界单元划分数量不变的情况下,通过分别改变节点数和载荷大小,对同一结构进行分析,划分网格如下图1.2所示:
图1.2 网格划分 1.21 定义边界条件并求解 本次实验中,讲梁的左端固定,将载荷施加在右端,施以垂直向下的集中力,集中力的大小为30kN观察变形情况,再将力改为50kN,观察变形情况,给出应力应变云图,并分析。 (1)给左端施加固定约束; (2)给悬臂梁右端施加垂直向下的集中力; 1.22定义边界条件如图1.3所示: 图1.3 定义边界条件 1.23 应力分布如下图1.4所示: 定义完边界条件之后进行求解。
《机械振动基础》实验报告 (2015年春季学期) 姓名 学号 班级 专业机械设计制造及其自动化报告提交日期2015.05.07 哈尔滨工业大学
报告要求 1.实验报告统一用该模板撰写,必须包含以下内容: (1)实验名称 (2)实验器材 (3)实验原理 (4)实验过程 (5)实验结果及分析 (6)认识体会、意见与建议等 2.正文格式:四号字体,行距为1.25倍行距; 3.用A4纸单面打印;左侧装订; 4.报告需同时提交打印稿和电子文档进行存档,电子文档由班长收 齐,统一发送至:liuyingxiang868@https://www.doczj.com/doc/2d9794417.html,。 5.此页不得删除。 评语: 教师签名: 年月日
实验一报告正文 一、实验名称:机械振动的压电传感器测量及分析 二、实验器材 1、机械振动综台实验装置(压电悬臂梁) 一套 2、激振器一套 3、加速度传感器一只 4、电荷放大器一台 5、信号发生器一台 6、示波器一台 7、电脑一台 8、NI9215数据采集测试软件一套 9、NI9215数据采集卡一套 三、实验原理 信号发生器发出简谐振动信号,经过功率放大器放大,将简谐激励信号施加到电磁激振器上,电磁激振器振动杆以简谐振动激励安装在激振器上的压电悬臂梁。压电悬臂梁弯曲产生电流显示在示波器上,可以观测悬臂梁的振动情况;另一方面,加速度传感器安装在电磁激振器振动杆上,将加速度传感器与电荷放大器连接,将电荷放大器与数据采集系统连接,并将数据采集系统连接到计算机(PC机)上,操作NI9215数据采集测试软件,得到机械系统的振动响应变化曲线,可以观测电磁激振器的振动信号,并与信号发生器的激励信号作对比。实验中的YD64-310型压电式加速度计测得的加速度信号由DHF-2型电荷放大器后转变为一个电压信号。电荷放大器的内部等效电路如图1所示。 q
模态分析与振动测试技术 固体力学 S0902015 李鹏飞
模态分析与振动测试技术 模态分析的理论基础是在机械阻抗与导纳的概念上发展起来的。近二十多年来,模态分析理论吸取了振动理论、信号分析、数据处理数理统计以及自动控制理论中的有关“营养”,结合自身内容的发展,形成了一套独特的理论,为模态分析及参数识别技术的发展奠定了理论基础。 一、单自由度模态分析 单自由度系统是最基本的振动系统。虽然实际结构均为多自由度系统,但单自由度系统的分析能揭示振动系统很多基本的特性。由于他简单,因此常常作为振动分析的基础。从单自由度系统的分析出发分析系统的频响函数,将使我们便于分析和深刻理解他的基本特性。对于线性的多自由度系统常常可以看成为许多单自由度系统特性的线性叠加。 二、多自由度系统模态分析 对于多自由度系统频响函数数学表达式有很多种,一般可以根据一个实际系统来讨论,给出一种形式;也可根据问题的要求来讨论,给出其他不同的形式。为了课程的紧凑,直接联系本课程的模态分析问题,我们就直接讨论多自由度系统通过频响函数表达形式的模态参数和模态分析。即多自由度系统模态参数与模态分析。 多自由度系统模态分析将主要用矩阵分析方法来进行。 我们以N个自由度的比例阻尼系统作为讨论的对象。然后将所分析的结果推广到其他阻尼形式的系统。 设所研究的系统为N个自由度的定常系统。其运动微分方程为: (2—1) ++= M X CX KX F ?)阶式中M,C,K分别为系统的质量、阻尼及刚度矩阵。均为(N N 矩阵。并且M及K矩阵为实系数对称矩阵,而其中质量矩阵M是正定矩阵,刚度矩阵K对于无刚体运动的约束系统是正定的;对于有刚体运动的自由系统则是半正定的。当阻尼为比例阻尼时,阻尼矩阵C为对称矩阵(上述是解耦条件)。 N?阶矩阵。即 X及F分别为系统的位移响应向量及激励力向量,均为1
ANSYS ——有限元分析 弹性平面问题、振动模态分析 1、弹性平面问题 1、1.题目一:(见图一所示) 图1 已知条件: 1.5a m =,0.4c m =,0.5d m =,6/q kN m =,5F kN =; 1、1.1解题的总体思路 由于单元体是一个300×140的,为了方便计算,采用直接建模法,先创建一个30×14的单元体结构,在挖去15×4的单元,建立如下模型(见图二所示) 图2 并且对模型进行加载和约束,左边为固定端约束,右下角为端约束。荷载分别为均布荷载和一个集中力荷载。 1、1.2运行结果 此节只显示运行的结果和简单的解释,详细的命令见1、1.3节命令流中各个命令的注解。 1、各个节点的位移和扭矩 主要列举了具有代表意义的节点,由于节点有15×31个,所以只列出约束处的
节点的位移和扭矩。 只列出了31节点的位移,其他约束处的位移都为0 结果显示出:Ux=0.017236mm Uy=0mm 2、受力后与受力前变形图(放大)【见图3所示】 图3 3、X方向的变形图【见图4所示】 图4 4、Y方向的变形图【见图5所示】
图5 5、内力图【见图6所示】 图6 结论: 节点31处是最容易收到破坏的,因此再设计时应注意此处的设计。 1、1.3命令流 /PREP7 N,1,0,0!确定第一个节点 N,31,300,0!确定第31个节点 FILL,1,31!在1到31节点中插入节点 NGEN,15,31,1,31,1,0,10!复制上述节点15行,每行间距为10 ET,1,PLANE42!常量的设置 MP,EX,1,200E9 MP,NUXY,1,0.3 E,1,2,33,32 !创建第一个单元 EGEN,30,1,1 !复制1到31个单元的建立 EGEN,14,31,1,30 !所有的单元创建 EDELE,151,165 !下面都是挖去中间的面 EDELE,181,195 EDELE,211,225 EDELE,241,255
研究生学院 机械工程专业硕士结课作业 课程题目:机械结构模态分析实验 指导老师: 姓名: 学号: 2015年08月23日
一、概述 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模态分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。 振动模态是弹性结构固有的、整体的特性。通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内的各阶主要模态的特性,就可以预言结构在此频段内在外部或内部各种振源作用下产生的实际振动响应。因此,模态分析是结构动态设计及设备故障诊断的重要方法。 机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动模态各不相同。模态分析提供了研究各类振动特性的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构物的模态参数,从而建立起结构物的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物的实际振动的响应历程或响应谱。 模态分析的经典定义:将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。坐标变换的变换矩阵为模态矩阵,其每列为模态振型。模态分析的最终目标是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。 模态分析技术的应用可归结为以下几个方面: 1) 评价现有结构系统的动态特性; 2) 在新产品设计中进行结构动态特性的预估和优化设计; 3) 诊断及预报结构系统的故障; 4) 控制结构的辐射噪声; 5) 识别结构系统的载荷 二、实验的基本过程 1、动态数据的采集及频响函数或脉冲响应函数分析 (1)激励方法。试验模态分析是人为地对结构物施加一定动态激励,采集各点的振动响应信号及激振力信号,根据力及响应信号,用各种参数识别方法获取模态参数。激励方法不同,相应识别方法也不同。目前主要由单输入单输出(SISO)、单输入多输出(SIMO)多输入多输出(MIMO)三种方法。以输入力的信号特征还可分为正弦慢扫描、正弦快扫描、稳态随机(包括白噪声、宽带噪声或伪随机)、瞬态激励(包括随机脉冲激励)等。 (2)数据采集。SISO方法要求同时高速采集输入与输出两个点的信号,用不断移动激励点位置或响应点位置的办法取得振形数据。SIMO及MIMO的方法则要求大量通道数据的高速并行采集,因此要求大量的振动测量传感器或激振器,试验成本较高。 (3)时域或频域信号处理。例如谱分析、传递函数估计、脉冲响应测量以及滤波、相关分析等。
机械原理实验心得体会 机械原理实验心得体会 机械原理课程设计心得体会 十几天的机械原理课程设计结束了,在这次实践的过程中学到了一些除技能以外的其他东西,领略到了别人在处理专业技能问题时显示出的优秀品质,更深切的体会到人与人之间的那种相互协调合作的机制,最重要的还是自己对一些问题的看法产生了良性的变化. 在社会这样一个大群体里面,沟通自然是为人处世的基本,如何协调彼此的关系值得我们去深思和体会.在实习设计当中依靠与被依靠对我的触及很大,有些人很有责任感,把这样一种事情当成是自己的重要任务,并为之付出了很大的努力,不断的思考自己所遇到的问题.而有些人则不以为然,总觉得自己的弱势…..其实在生活中这样的事情也是很多的,当我们面对很多问题的时候所采取的具体行动也是不同的,这当然也会影响我们的结果.很多时候问题的出现所期待我们的是一种解决问题的心态,而不是看我们过去的能力到底有多强,那是一种态度的端正和目的的明确,只有这样把自己身置于具体的问题之中,我们才能更好的解决问题. 在这种相互协调合作的过程中,口角的斗争在所难免,关键是我们如何的处理遇到的分歧,而不是一味的计较和埋怨.这不仅仅是在类似于这样的协调当中,生活中的很多事情都需要我们有这样的处理能力,面对分歧大家要消除误解,相互理解,增进了解,达到谅解…..也许很多问题没有想象中的那么复杂,关键还是看我们的心态,那种处理和解决分歧
的心态,因为毕竟我们的出发点都是很好的.课程设计也是一种学习同事优秀品质的过程,比如我组的纪超同学,人家的确有种耐得住寂寞的心态.确实他在学习上取得了很多傲人的成绩,但是我所赞赏的还是他追求的过程,当遇到问题的时候,那种斟酌的态度就值得我们每一位学习,人家是在用心造就自己的任务,而且孜孜不倦,追求卓越.我们过去有位老师说得好,有有些事情的产生只是有原因的,别人能在诸如学习上取得了不一般的成绩,那绝对不是侥幸或者巧合,那是自己付出劳动的成果的彰显,那是自己辛苦过程的体现.这种不断上进,认真一致的心态也必将导致一个人在生活和学习的各个方面做的很完美,有位那种追求的锲而不舍的过程是相同的,这就是一种优良的品质,它将指引着一个人意气风发,更好走好自己的每一步. 在今后的学习中,一定要戒骄戒躁,态度端正,虚心认真….要永远的记住一句话:态度决定一切. 一、温故而知新。课程设计发端之始,思绪全无,举步维艰,对于理论知识学习不够扎实的我深感“书到用时方恨少”,于是想起圣人之言“温故而知新”,便重拾教材与实验手册,对知识系统而全面进行了梳理,遇到难处先是苦思冥想再向同学请教,终于熟练掌握了基本理论知识,而且领悟诸多平时学 习难以理解掌握的较难知识,学会了如何思考的思维方式,找到了设计的灵感。二、思路即出路。当初没有思路,诚如举步维艰,茫茫大地,不见道路。在对理论知识梳理掌握之后,茅塞顿开,柳暗花明,思路如泉涌,高歌“条条大路通罗马”。顿悟,没有思路便无出路,
振动与波动题库 一、选择题(每题3分) 1、当质点以频率ν 作简谐振动时,它的动能的变化频率为( ) (A ) 2v (B )v (C )v 2 (D )v 4 2、一质点沿x 轴作简谐振动,振幅为cm 12,周期为s 2。当0=t 时, 位移为cm 6,且向x 轴正方向运动。则振动表达式为( ) (A) )(3 cos 12.0π π-=t x (B ) )(3 cos 12.0π π+=t x (C ) )(3 2cos 12.0π π-=t x (D ) ) (32cos 12.0π π+=t x 3、 有一弹簧振子,总能量为E ,如果简谐振动的振幅增加为原来的两倍,重物的质量增加为原来的四倍,则它的总能量变为 ( ) (A )2E (B )4E (C )E /2 (D )E /4 4、机械波的表达式为()()m π06.0π6cos 05.0x t y +=,则 ( ) (A) 波长为100 m (B) 波速为10 m·s-1 (C) 周期为1/3 s (D) 波沿x 轴正方向传播 5、两分振动方程分别为x 1=3cos (50πt+π/4) ㎝ 和x 2=4cos (50πt+3π/4)㎝,则它们的合振动的振幅为( ) (A) 1㎝ (B )3㎝ (C )5 ㎝ (D )7 ㎝ 6、一平面简谐波,波速为μ=5 cm/s ,设t= 3 s 时刻的波形如图所示,则x=0处的质点的振动方程为 ( ) (A) y=2×10- 2cos (πt/2-π/2) (m) (B) y=2×10- 2cos (πt + π) (m) (C) y=2×10- 2cos(πt/2+π/2) (m) (D) y=2×10- 2cos (πt -3π/2) (m) 7、一平面简谐波,沿X 轴负方向 传播。x=0处的质点 的振动曲线如图所示,若波函数用余弦函数表示,则该波的初位相为( ) (A )0 (B )π (C) π /2 (D) - π /2 8、有一单摆,摆长m 0.1=l ,小球质量g 100=m 。设小球的运动可看作筒谐振动,则该振动的周期为( ) (A) 2π (B )32π (C )102π (D )52π 9、一弹簧振子在光滑的水平面上做简谐振动时,弹性力在半个周期内所做的功为 [ ] (A) kA 2 (B )kA 2 /2 (C )kA 2 /4 (D )0
模态分析实验报告 姓名: 学号: 任课教师: 实验时间: 指导老师: 实验地点:能源与动力工程学院 柴油机拆装实习一楼振动测试实验室
实验1 传递函数的测量 一、实验内容 用锤击激振法测量传递函数。 二、实验目的 1)掌握锤击激振法测量传递函数的方法; 2)测量激励力和加速度响应的时间记录曲线、力的自功率谱和传递函数; 3)分析传递函数的各种显示形式(实部、虚部、幅值、对数、相位)及相干函 数; 4)比较原点传递函数和跨点传递函数的特征; 5)考察激励点和响应点互换对传递函数的影响; 6)比较不同材料的力锤锤帽对激励信号的影响; 三、实验仪器和测试系统 1、实验仪器 主要用到的实验仪器有:冲击力锤、加速度传感器,LMS LMS-SCADAS Ⅲ测试系统,具体型号和参数见表1-1。 仪器名称型号序列号灵敏度备注 数据采集和分析系统LMS-SCADAS Ⅲ比利时力锤LC 3164 4 mV/N 加速度传感器100 mV/g 丹麦B&K 表1-1 实验仪器 2 、测试系统 利用试验测量的激励信号(力锤激励信号)和响应的时间历程信号,运用数字信号处理技术获得频率响应函数(Frequency Response Function, FRF),得到系统的非参数模型。然后利用参数识别方法得到系统的模态参数。测试系统主要完成力锤激励信号及各点响应信号时间历程的同步采集,完成数字信号的处理和参数的识别。 测量分析系统的框图如图1-1所示。测量系统由振动加速度传感器、力锤和比利时LMS公司SCADAS采集前端及Modal Impact测量分析软件组成。力锤及加速度传感器通过信号线与SCADAS采集前端相连,振动传感器及力锤为ICP
学生学号1049721501301实验课成绩 武汉理工大学 学生实验报告书 实验课程名称机械中的有限单元分析机电工程学院开课学院 指导老师姓名
学生姓名 学生专业班级机电研1502班 学年第学期2016—20152 实验一方形截面悬臂梁的弯曲的应力与变形分析 钢制方形悬臂梁左端固联在墙壁,另一端悬空。工作时对梁右端施加垂直 向下的30KN的载荷与60kN的载荷,分析两种集中力作用下该悬臂梁的应力与应变,其中梁的尺寸为10mmX10mmX100mm的方形梁。 方形截面悬臂梁模型建立1.1 建模环境:DesignModeler15.0。 定义计算类型:选择为结构分析。 定义材料属性:弹性模量为 2.1Gpa,泊松比为0.3。 建立悬臂式连接环模型。 (1)绘制方形截面草图:在DesignModeler中定义XY平面为视图平面,并正 视改平面,点击sketching下的矩形图标,在视图中绘制10mmX10mm的矩形。 (2)拉伸:沿着Z方向将上一步得到的矩阵拉伸100mm,即可得到梁的三维模型,建模完毕,模型如下图 1.1所示。
图1.1方形截面梁模型 :定义单元类型1.2 选用6面体20节点186号结构单元。 网格划分:通过选定边界和整体结构,在边界单元划分数量不变的情况下,通过分别改变节点数和载荷大小,对同一结构进行分析,划分网格如下图 1.2
所示: 图1.2网格划分 1.21定义边界条件并求解 本次实验中,讲梁的左端固定,将载荷施加在右端,施以垂直向下的集中 力,集中力的大小为30kN观察变形情况,再将力改为50kN,观察变形情况,给出应力应变云图,并分析。 (1)给左端施加固定约束; (2)给悬臂梁右端施加垂直向下的集中力; 1.22定义边界条件如图1.3所示:
随机振动试验报告 高等桥梁结构试验报告 讲课老师: 张启伟(教授) 姓名: 史先飞 学号: 1232627 试验报告 1 试验目的 1.过试验进一步加深对结构模态分析理论知识的理解; 2.熟悉随机振动试验常用仪器的性能与操作方法; 3.复习和巩固随机振动数据测量和分析中有关基本概念; 4.掌握通过多点激振、单点拾振的方法,利用DASP2005软件进行模态分析的基本操作步骤。
2 试验仪器和设备 1. ZJY-601振动与控制教学实验仪系统(ZJY-601A型振动教学实验仪、激励锤、YJ9-A型压电型加速度传感器等)。 2. DASP 16通道接口箱。 3. 装有“DASP2005智能数据采集和信号分析系统”软件的PC机。 4. 有关设备之间的联接电缆。 3 试验原理 3.1模态叠加原理 N自由度线性振动系统的运动微分方程是一组耦合的方程组: 引入模态矩阵Φ和模态坐标(广义坐标或主坐标)q,使X= Φq。 如果阻尼矩阵能对角化,方程组即可解耦: 解耦后的第i个方程为: 可见,采用固有振型描述振动的模态坐标后,N自由度线性振动系统的振动响应可以表示为N阶模态响应的叠加。 3.2实模态理论 实模态理论建立在无阻尼的假设基础上。在实模态理论中,模态频率就是系统的无阻 ,尼模态固有频率错误~未找到引用源。;而固有振型矩阵中的各元素都是实数,它们之间i 的相位差是0?或180?。 系统在P点激励,l点测量的频响函数为:
K,,式中,称为频率比,,为模态固有频率。当,则: ,,,,,/,,,iiiiiMi 取频响函数矩阵的一列或一行,如第P列,就可确定振动系统的全部动力特性(模态参数)。 3.3伪实模态理论 某些有阻尼振动系统有时会出现与实模态一样的实数振型,而非复数振型,但其模态 2,,,,,1固有频率为,具有这种性质的振动系统的模态称为伪实模态。伪实模态理diii 论仅适应于阻尼矩阵可解耦,即可采用固有振型矩阵正交化模态称为伪实模态。在伪实模态下,各测点的相位差都是0?或180?。 伪实模态理论仅适应于阻尼矩阵可解耦,即可采用固有振型矩阵正交化的情况。一般情况下,阻尼矩阵对角化的充要条件为: 上式也是有阻尼振动系统方程解耦的充要条件。 总之,H(ω)建立了模态参数与频响函数的关系。因此,利用实验测出的H(ω) 值,即可计算出系统的模态参数。根据频响函数的互易定理及模态理论,只需 H(ω)矩阵的一列(或一行)即可求出全部模态参数。
机设1305 彭鹏程1310140521 一个简化的飞机机翼模型如图所示,该机翼沿延翼方向为等厚度。有关的几何尺寸见下图,机翼材料的常数为:弹性模量E=0.26GPa,泊松比m=0.3,密度r =886 kg/m。对该结构进行振动模态的分析。 (a) 飞机机翼模型 (b) 翼形的几何坐标点 振动模态分析计算模型示意图 解答这里体单元SOLID45 进行建模,并计算机翼模型的振动模态。 建模的要点: ⑴首先根据机翼横截面的关键点,采用连接直线以及样条函数< BSPLIN >进行连接以形成一个由封闭线围成的面; ⑵在生成的面上采用自由网格划分生成面单元(PLANE42); ⑶设置体单元SOLID45,采用
机械设计学实验心得体会 机械设计学实验心得体会 《机械设计学》实践教学机械创新设计实验报告 学生姓名:学号:班级: 题目: 小组组长: 年月日 机械创新设计实验 一、 实验目的 通过实验使学生能够以系统的观点去发掘机械产品设计的规律和特点,并培养学生的创新意识,使学生的综合素质得到提高。二、实验原理 系统设计方法。三、实验要求 分组(最好4~6人)或个人完成实验,独立完成实验报告。四、实验仪器设备 机械系统设计手册及相关参考书。五、实验类型、性质与学时 类型:综合、创新学时:6课时六、实验步骤 根据所学知识,提出一机械设备总体设计方案(参考题目附后),要求包含物料 流系统、能量流系统及信息流系统;分小组讨论并确定方案。七、实验报告
实验报告必须包含的内容: 1、引言:对所选课题进行资料收集,简单介绍类似系统或技术的国内外研究与应用现状; 2、描述系统的总功能、分功能; 3、分功能实现方案;3、绘制系统的功能结构图; 4、绘制系统的运动循环图; 5、绘制系统的总体设计草图; 题目一(适用于一组):载重车装载系统的开发 见教材P362《课外作业1》 题目二(适用于二组):讲义自动发放机见教材P363《课外作业3》题目四(适用于四组):比萨饼成形机见教材P365《课外作业7》 题目六(适用于六组):移动车载升降系统设计设计一个安装在一台卡车上的升降平台,要求如下: 1.收缩范围:距离车厢底部2米到8米; 2.收缩至2米时不影响卡车正常行驶; 3.升高至8米时能够保证在不大于10km/h的行使速度,加速度不大于0.5m/s2 的情况下安全作业; 4.平台顶部能承受30kg负荷。 要求设计移动平台(含驱动、制动、控制系统)题目八(适用于七组):布线装置见教材P364《课外作业4》 分组情况 1题目一魏绍超吴昊张健马耀军许晓蒙贺建博2题目二齐相宇杨荣耀
研究生课程论文(2016-2017学年第二学期) 振动测试技术 研究生:
模态试验大作业 0 模态试验概述 模态试验(modal test)又称试验模态分析。为确定线性振动系统的模态参数所进行的振动试验。模态参数是在频率域中对振动系统固有特性的一种描述,一般指的是系统的固有频率、阻尼比、振型和模态质量等。 模态试验中通过对给定激励的系统进行测量,得到响应信号,再应用模态参数辨识方法得到系统的模态参数。由于振动在机械中的应用非常普遍。振动信号中包含着机械及结构的内在特性和运行状况的信息。振动的性质体现着机械运行的品质,如车辆、航空航天设备等运载工具的安全性与舒适性;也反映出诸如桥梁、水坝以及其它大型结构的承载情况、寿命等。同时,振动信号的发生和提取也相对容易因此,振动测试与分析已成为最常用、最基本的试验手段之一。 模态分析及参数识别是研究复杂机械和工程结构振动的重要方法,通常需要通过模态实验获得结构的模态参数即固有频率、阻尼比和振型。模态实验的方法可以分为两大类:一类是经典的纯模态实验方法,该方法是通过多个激振器对结构进行激励,当激振频率等于结构的某阶固有频率,激振力抵消机构内部阻尼力时,结构处于共振状态,这是一种物理分离模态的方法。这种技术要求配备复杂昂贵的仪器设备,测试周期也比较长;另一类是数学上分离模态的方法,最常见的方法是对结构施加激励,测量系统频率响应函数矩阵,然后再进行模态参数的识别。 为获得系统动态特性,常需要测量系统频响函数。目前频响函数测试技术可以分为单点激励单点测量( SISO)、单点激励多点测量( SIMO) 、多点激励多点测量( MIMO)等。单点激励一般适用于较小结构的频响函数测量,多点激励适用于大型复杂机构,如机体、船体或大型车辆机构等。按激励力性质的不同,频响函数测试分为稳态正弦激励、随机激励及瞬态激励三类,其中随机激励又有纯随机、伪随机、周期随机之分。瞬态激励则有快速正弦扫描激励、脉冲激励和阶跃激励等几种方式。按激励力性质的不同,频响函数测试分为稳态正弦激励、随机激励及瞬态激励三类,其中随机激励又有纯随机、伪随机、周期随机之分,瞬态激励则有快速正弦扫描激励、脉冲激励和阶跃激励等几种方式。 振动信号的分析和处理技术一般可分为时域分析、频域分析、时频域分析和时间序列建模分析等。这些分析处理技术从不同的角度对信号进行观察和分析,为提取与设备运行状态有关的特征信息提供了不同的手段。信号的时域分析包括时域统计分析、时域波形分析和时域相关分析。对评价设备运行状态和
大学物理1复习题答案 一、单选题(在本题的每一小题备选答案中,只有一个答案是正确的,请把你认为正确答案的题号,填入题干的括号内) 1.一个弹簧振子和一个单摆(只考虑小幅度摆动),在地面上的固有振动周期分别为T 1和 T 2。将它们拿到月球上去,相应的周期分别为'T 1和'T 2。则有 ( B ) A .'T T >11且 'T T >22 B .'T T =11且 'T T >22 C .'T T <11且 'T T <22 D .'T T =11且 'T T =22 2.一物体作简谐振动,振动方程为cos 4x A t ?? =+ ?? ? πω,在4 T t = (T 为周期)时刻,物体的加速度为 ( B ) A. 2ω 2ω C. 2ω 2ω 3.一质点作简谐振动,振幅为A ,在起始时刻质点的位移为/2A -,且向x 轴的正方向 运动,代表此简谐振动的旋转矢量图为 ( D ) A A A A A A C) A x x A A x A B C D 4. 两个质点各自作简谐振动,它们的振幅相同、周期相同.第一个质点的振动方程为 )cos(1αω+=t A x .当第一个质点从相对于其平衡位置的正位移处回到平衡位置时,第二 个质点正在最大正位移处.则第二个质点的振动方程为 ( B ) A. )π21cos( 2++=αωt A x B. )π21 cos(2-+=αωt A x . C. )π2 3 cos( 2-+=αωt A x D. )cos(2π++=αωt A x .
5.波源作简谐运动,其运动方程为t y π240cos 10 0.43 -?=,式中y 的单位为m ,t 的单 位为s ,它所形成的波形以s m /30的速度沿一直线传播,则该波的波长为 ( A ) A .m 25.0 B .m 60.0 C .m 50.0 D .m 32.0 6.已知某简谐振动的振动曲线如图所示,位移的单位为厘米,时间单位为秒。则此简谐振动的振动方程为: ( B ) A .cos x t ππ??=+ ???2 2233 B .cos x t ππ??=+ ??? 42233 C .cos x t ππ??=- ???22233 D .cos x t ππ??=- ??? 42233 二. 填空题(每空2分) 1. 简谐运动方程为)4 20cos(1.0π π+ =t y (t 以s 计,y 以m 计) ,则其振幅为 0.1 m,周期为 0.1 s ;当t=2s 时位移的大小为205.0m. 2.一简谐振动的旋转矢量图如图所示,振幅矢量长2cm ,则该简谐振动 的初相为4 0π ?=,振动方程为_)4 cos(2π π+ =t y 。 3. 平面简谐波的波动方程为()x t y ππ24cos 08.0-=,式中y 和x 的单位为m ,t 的单位为s ,则该波的振幅A= 0.08 ,波长=λ 1 ,离波源0.80m 及0.30m 两处的相位差=?? -Л 。 4. 一简谐振动曲线如图所示,则由图可确定在t = 2s 时刻质点的位移为___0 ___,速度为:πω3=A . t