1.1 引言
我们知道,对于任何一个机器人系统来说,机构是它的“躯体”,控制系统则是它的“大脑”和“神经系统”,一个设计合理的机器人机构加上一个有效的控制系统,机器人才能成为一个名副其实的、“活生生”的机器人,控制系统的性能直接决定着机器人整体功能的实现和性能的高低。机构和控制系统是机器人不可分割的两个部分,在机器人设计过程中,它们始终相互影响,一个合理的机构才能将控制系统的性能完全发挥出来,同时,一个能与机构相匹配的良好合理的控制系统才能充分发挥机器人机构的特点,模块化可重组移动机器人是一种机制特点非常鲜明的机器人,它由多个一样的模块连接而成,每个模块都是完整的功能单元,能通过模块重组改变自身形态按照不同的步态进行移动。因此,控制系统的设计将要体现模块化机器人模块化、可重组的特点,这样才能发挥模块化机器人的性能。本文基于国家高科技研究发展计划(863)计划课题“模块化可重组机器人技术研究”,其任务就是为模块化机器人设计一个合乎机器人特点的控制系统。
本文将在分析模块化可重组移动机器人特点的基础上,将提出一个“模块化分布式控制系统”(MDCS:Modular Distributed Control System)的概念,并完成机器人控制系统的设计。
1.2 模块化机器人
模块化可重组移动机器人(Modular Reconfigurable Robot)(在下文中简称为模块化机器人)是指能够改变外形和运动方式的机器人系统。模块化机器人的基本思想就是:一个机器人由若干个相同的简单模块组成,它能根据任务的需要或外界环境的变化而对模块进行重组,从而改变自身的形状和运动姿态以适应不同的任务或不同的环境。
1.2.1 模块化机器人的提出
从机器人诞生到本世纪80年代初,机器人技术经历了一个漫长缓慢的发展过程,到了90年代,随着计算机技术、微电子技术、网络技术等的快速发展,机器人技术得到了飞速发展。除了工业机器人水平不断提高之外,各种用于非制造业的先进机器人系统也有了长足的进展。机器人技术已成为高科技应用领域中的重要组成部分,它正向着具有行走能力、对环境自主性强的智能机器人发展方向。作为新一代的智能机器人,不仅要有感知、推理、判断等能力,还要有强健的“四肢”——运动执行机构。现在的移动机器人大都是借助轮子或者机械腿作为运动执行机构,它们的共同缺点是运动方式比较单一,对地形(特别是未知环境)的适应性不强。例如,机械腿式机器人行走时,当碰到比较松软的地形(如沙地)时,它就无法很好地进行移动。模块化可重组移动机器人就是为了克服这些传统机器人的固有缺点而被提出的,它是一种高度模块化、可重构变形的移动机器人。
1.2.2 模块化机器人的特点
模块化可重组移动机器人,顾名思义,其最大的两个特点就是:模块化和可重组性。
模块化——即模块化机器人设计的中心思想。机器人由若干个相同的模块组成,每个模块都是一个相对独立完整的单元实体,模块由电源、传感、控制、动力、通信等几个单元组成,能独立实现一些简单的功能并能和其他模块进行通信。
可重组性——机器人根据地形环境的改变或任务的需要而对自身的若干模块进行重组从而改变自身形态和运动方式。
除了模块化和可重组特点以外,模块化机器人还有着系统设计简单化、造价低、可替代性、开放性、可自动修复以及强健性和高稳定性等特点。
系统设计简单化、造价低。由于组成机器人的模块数量较多(几十个到几百甚至成千上万),整个机器人所要实现的功能被分离到众多的模块上,只要求每个模块实现有限的简单功能,因此,模块的结构就可以相当简化,其造价也相当低廉。而整个机器人系统由这些标准模块
按一定的拓扑结构简单拼接而成,降低了整个机器人系统的复杂性和造价。
可替代性。每个模块都被设计成相同的结构,任意两个模块之间都可以相互替代。虽然机器人在按特定的步态进行移动时,每个模块在整个机器人系统中扮演着不同的角色,但是它们功能都相同,即都可以被放在整体机构的任意位置进行工作。当机器人系统中某个模块发生故障时,可以适应另一个模块代替它以保证整个系统的正常工作。
开放性强。模块化机器人系统是一个开放的系统,可以根据任务的不同选择不同数量的模块构成机器人整体。每个模块的性能都拥有一定的升级空间,机器人的整体性能可以通过模块性能的升级而得到改善。
功能冗余性大。每个模块具有的功能都是一样的,它们之间可以相互替代,而每个模块在系统中实现的功能可能各不一样,因此每个模块在功能上都具有相当的冗余。
可自动修复性。由于每个模块的功能都相同,如果一个模块出了问题,就可以用另一个模块来代替,并且丢弃故障模块,这就大大增强了机器人的自我修复能力。
强健性、稳定性。冗余性和可修复功能的组合就增强了系统的强健性。另外,由于每个单元模块都被设计的非常简单,单元模块本身就有相当高的稳定性,而且每个模块在整个系统中都只实现非常有限的功能,对整个系统性能的影响也非常有限,这样即使少数模块出了问题,也不会对整个系统产生太大的影响,系统仍然可以正常的工作。相比而言,传统机器人各个环节耦合的比较紧凑,如果哪个环节出现问题,即使很小,对整个系统来说也可能是灾难性的。
1.2.3 模块化机器人的发展状况
国外对模块化机器人系统已经进行了大量的研究,目前已经开发的模块化机器人系统或可重组机器人系统主要有两类:一类是静态可重组机器人系统,另一类是动态可重组机器人系统。静态可重组就是在工作之前装配好机器人,而动态可重组就是系统在工作时能动态根据需要进行重组自身。在本文以下部分提到的手动可重组移动机器人属于前者,而自动可重组移动机器人则属于后者。静态可重组机器人系统大都适用于工业机器人,如Queenslan大学的Gordon Wyeth, James Kennedy等人设计一个由有规则几何形状独立模块组成的工业机械手PUMA 560,可以任意改变机械手的形状以适应不用的装备任务。动态可重组机器人系统有:Pamecha和Chirikjia的构形变化机器人系统(Metamorphic Robotic System),它是由一套独立的机电模块组成的,每个模块都有连接、脱开及越过相邻的功能,每个模块没有动力,但允许动力和信息输入且可通过它输到相邻模块,构形改变是通过每个模块在相邻模块上的移动来实现的,这种系统具有动态自动重组的能力;英国Darthmouth学院的Keith Kotay和Daniela Rus在1998年提出了分子(Molecule)的概念,自重构机器人的模块称为分子,分子是建立自重组机器人的基础,分子和其他分子相连且分子能够在其它分子上运动形成任意的三维结构。对于模块化机器人的研究,现在还大都没有进入实用化,特别对于模块化动态自动可重组机器人来说,收到诸多条件限制,现在还停留在理论和运用计算机进行仿真阶段。1994年,Xerox公司帕洛阿尔托研究中心(PARC:Palo Alto Research Center)Yim等人对模块化可自动重组移动机器人概念进行研究,从1997年到现在它们研究了PloyBot G1、G2,现在在进行G3的研究。其中G2具有典型意义,系统采用主从结构,由一个主控模块和若干(十几~二十多个)标准功能模块组成简单的链状外形结构,实现了链式到四足的自动重组。虽然它的系统远比Pamecha、Keith Kotay等人提出的模块化机器人系统简单,但其意义在于推动了模块化自动可重组移动机器人的实用研究,为模块化机器人研究开拓了新的领域。
1.2.4 模块化机器人研究的意义、发展方向和应用前景
模块化机器人的模块化机构是它的一大特点,它可以由几个到几百甚至成千上万个模块组成,模块可以被设计成多种多样,可以是圆形、方形、多面形及其它形状,模块间的连接方式也可以是多种多样的,可以通过连杆连接、面面对接等等。虽然每个模块的结构和功能都有限,
但众多的模块连接在一起,就可以组成各种各样简单或复杂的形态,所构成机器人的运动方式也可以是各种各样的。因此,对模块化机器人的研究将会推动机器人机构设计、运动规划、动力学分析、运动控制等方面的发展。模块化机器人要实现自动重构,最基本的就是要实现模块的自动对接,这包含有模块件电气接口(包括自动闭锁装置)设计、多传感器信息融合、对接路径规划等方面的技术,通过研究也将大大推动这些方面的发展。再则,由于机构上和传统机器人的不一样,这也将大大推动机器人控制系统的更变发展。另外,模块化机器人的运动大都是效仿生物的运动,这也将推动仿生机器人研究的进行。
由于模块化机器人具有形变和变化运动方式以及能自我修复等优越的特点,能很好地适应复杂和未知的地形环境,使得它具有非常广泛的应用前景。在科学探索方面,它可以被应用于人类无法到达或者危险环境中的探索,如星球探索、深海作业、管道作业等;在日常生活方面,该技术可以被用于玩具、家用机器人制造等。
虽然模块化机器人的应用前景非常美好,但在现阶段,它的研究尚处于开拓和探索阶段,很多方面都还处于理论探讨阶段。目前还需要在以下几个方面进行进一步的研究:①单个模块的结构和功能分析以及设计实现;②机器人整体机构表达描述方法的研究;③机器人重构过程、运动学和动力学的研究;④模块化机器人的控制系统和搞笑的可重构实时控制软件的研究。
1.3 本文内容
本文的相关研究是基于“863计划”课题“模块化可重组机器人的研究”而展开的。它的基本任务是设计一个适用于模块化机器人的控制系统。
课题“模块化可重组机器人的研究”的目标是完成多模块构成的、具有三维空间可重组能力的模块化机器人的设计,以及实现蛇形、履带形和四足形等经典构形之间的相互变化。根据实验室的具体实情,研究工作从横向上分为机器人模块设计、机器人控制系统设计、机器人运动步态规划以及模块自动对接设计实现等四个部分。
由于目前模块化机器人研究在国内外都还刚开始,尚处于理论探索和初步研制设计阶段,又出于理论和实践探索、节约研制成本和降低研究风险等目的,我们从纵向上将模块化可重组机器人的研究分成手动可重组机器人和自动可重组机器人两个阶段进行。与自动可重组机器人相比,手动可重组机器人少了自动重组功能,则它在模块机构设计、加工精度、控制系统的复杂程度和性能等方面的要求相比都要低的多,因此在设计时可以采用比较低廉、运用简单器件,不仅使设计成本大大降低,而且开发的周期也将缩短很多,开发的成功率也会提高。除此之外,手动可重组机器人系统在模块结构、电源方案、控制系统、通信系统设计和步态规划等方面和前者相比都是大同小异,所以第一阶段手动可重组机器人的研制除了为自动可重组机器人的研究及设计开拓思路和提供必要的可行性论证以外,还可以在模块结构、电源方案、控制系统、通信系统设计和步态规划等方面为下阶段的研究积累经验。另外,第一阶段的研究也是一个完整的过程,其成果——模块化手动可重组机器人也可以作为独立完整的成果来看待。
1.3.2 本文的研究任务
本文中对控制系统的设计也是伴随着模块化机器人研究设计的过程而展开的,所以从纵向上也分为两个阶段,即手动可重组机器人控制系统的设计和自动可重组机器人控制系统的设计。模块化机器人作为一种新型的机器人,它在结构模块化特点鲜明,具有许多传统移动机器人所不具备的优点。控制系统是一个机器人系统的核心部分,它性能的优劣、结构合理与否直接决定着机器人能否发挥应有的性能。因此,模块化机器人也要拥有一个与之结构匹配、能最大限度发挥它性能特点的控制系统。本文所研究的主要任务是根据模块化机器人对控制系统的要求,建立符合模块化机器人机构、性能特点的控制系统模型,然后结合手动可重组机器人和自动可重组机器人各自的特点,完成各自控制系统的设计。
1.3.3 本文的结构
本论文将分成五章:
●第一章介绍模块化可重组机器人的特点以及发展状况,以及本文研究工作的基本状况。
●第二章在介绍机器人控制系统发展状况的基础上,集合传统主从和分布式控制系统的特点,提出适用于模块化机器人的控制系统——模块化分布式控制系统的概念,并对该系统的设计进行详细分析。
●第三章详细介绍模块化手动可重组机器人控制系统的硬件和软件的设计,以及机器人系统的实现状况。
●第四章详细介绍模块化自动可重组机器人控制系统的硬件设计。
●第五章对整个研究工作进行总结对未来工作进行展望。
可重构模块化机器人现状和发展 摘要:由于市场垒球化的竞争,机器人的应用范围要求越来越广.而每种机器人的构形仅船适应一定的有限范围,因此机器人的柔性不船满足市场变化的要求.解决这一问题的方法就是开发可重构机器人系统.本文介绍了可重构机器人的发展状况,分析了可重构机器人的研究内容和发展方向. 关键词:重构性、机器人、摸块 1 引言 从理论上来讲,机器人是一种柔性设备,它能通过编程来适应新的工作,然而实际应用中很少使用这种情况.但传统的机器人都是根据特定的应用范围来开发的,虽然对那些任务明确的工业应用来讲,这种机器人已经足够满足实际需要了,然而由于市场全球化的竞争,机器人的应用范围要求越来越广,而每种机器人的构形仅能适应一定的有限范围,因此机器人的柔性不能满足市场变化的要求,解决这一问题的方法就是开发可重构机器人系统,它是由一套具有各种尺寸和性能特征的可交换的模块组成,能够被装配成各种不同构形的机器人,以适应不同的工作.因此可重构机器人系统的研究已引起越来越多的研究者和工业应用的兴趣,本文在分析了可重构模块化机器人的发展状况后提出了今后需要研究的方向。 2 国内外研究状况 国外对可重构机器人系统已经进行了大量的研究,目前已经开发的模块化机器人系统或可重构机器人系统主要有两类:一类是动态可重构机器人系统,另一类是静态可重构机器人系统.动态可重构机器人系统有:Pamecha 和Chirikjian~“的构形变化机器人系统(MetamorphicRobotic System).它是由一套独立的机电模块组成的,每个模块都有连接.脱开及越过相邻模块的功能,每个模块设有动力,但允许动力和信息输入且可 通过它输到相邻模块,构形改变是通过每个模块在相邻模块上的移动来实现的,这种系统具有动态自重构的能力.KotayC21]等人提出了分子(Mo[ecu[e)的概念,自重构机器人的模块称为分子,分子是建立自重构机器人的基础,分子和其它分子相连接且分子 能够在其它分子上运动形成任意的三维结构,是一种动态的自重构系统.YimE 研究了一种动态可重构移动机器人,不用轮子和履带.而是通过称为多边形杆结构的
北京大学工学院课程报告专用纸 2011 -2012学年第2 学期 姓名:雷博学号: 1100011099 课程名称:机器人竞赛实践主讲教师:谢广明 题目: 教师评语: 成绩:教师签名:
机器人的模块化机器人竞赛实践课程期末论文 雷博 2012 06 04
机器人的模块化 关键字:机器人,模块化,协调与整合; 背景:随着科学和技术的进步,机器人的类人化仿真已经取得了一些比较重要的成果。比如机器人的类人化双足行走○1和机器人人机互动手臂○2基本已经实现,还有机器人对于人面部表情的模拟和识别○3也已经取得了突破性的进展。总体上看,机器人的某一模块以在功能,作用方面的实现为方向的研发已经突飞猛进。 需要注意的是,这些“成熟”的机器人没有学习和记忆能力,也没有多少分析决策能力:因而没有人的指令预设它就不会动,就算能动也只是做一些又预设程序决定了的重复性活动;它也没法“新陈代谢”○4,永远存在着硬件方面的机械性老化和磨损便会一直进行,即是一个机器人没法长期性的自动更新,只能越来越破,越来越旧;它也没有感情○5,更不可能懂的什么是爱○6;······于是,我们就能发现,目前机器人的研究和开发还只是一个模拟性阶段过程,那么纵然自动执行指令的能力有多么好,它们逃不出“ROBOT”这个单词背后暗指“奴隶”的诅咒○7。 和人完善和成熟的生理功能相比,机器人的化还有很长的路要走。 由此,在机器人的研究和开发领域,一定程度上地分析和借鉴人类生理上的精妙系统化构造和各个系统搭配工作的过程将具有很重要的启发意义。并且,相应地将机器人模块化分析和研究将有助于“隔离法”局部性研究。且不提机器人高度智能化和自主化的负面后果,能够做出智能化和自主化的便已经是一种价值的伟大创造,而且我们也不应该因噎废食,仅仅因为潜在的风险而停下探索的脚步。 人类,作为万物之灵,是生物进化史上的一个奇迹。在生理上神经系统、运动系统、消化系统、呼吸系统、免疫系统、泌尿系统、脉管系统、生殖系统、内分泌系统和感觉器官○8一起协调合作,稳定搭配,借助新陈代谢这一核心过程,实现人了自主思考,学习与推理,运动和语言等重要特征性生理功能。 机器人的模块化 机器人模块化的定义:机器人的模块化,就是将机器人某些要素组合在一起,构成一个具有特定功能的子系统;再将这个子系统作为通用性的模块与其他子系统进行组合,构成一个完整的机器人,甚至产生多种不同功能或相同功能、不同性能的效果。 机器人模块化的意义:
第一次实验:MultiFLEX控制卡编程实验 蜂鸣器实验 #include
{ write_gpio(~((uint16)io_out)); delay(5);//延时5×20MS=0.1s io_out<<=1; write_gpio(~((uint16)io_out)); delay(5); } } else write_gpio(0xFF00); } } 第二次实验:多自由度串联式机械手 #include "Public.h" #include "Usertask.h" void u ser_task(void) { uint8 array_rc[23]={0};//舵机控制数组长度为24,可控制12路舵机,舵机运动函数要求array_rc[偶数]为舵机目标角度值,array_rc[奇数]为舵机运动速度值 array_rc[0]=90; //舵机1,中位为0度(对应数值90),目标角度+20度。取值范围0-180,超过此范围程序会丢弃此数据 array_rc[1]=170;//舵机1,速度为170。取值范围0-255,超过范围程序会丢弃此数据 array_rc[2]=90;//舵机2目标角度设置 array_rc[3]=170;//舵机2转动速度设置 array_rc[4]=90+90;//舵机3 array_rc[5]=170; rc_moto_control(array_rc);//将舵机运动信息交给舵机运动函数,实现舵机运动 delay(50);//延时50*20MS= 1S,给舵机提供反应时间,此反应时间应大于舵机实际运动所需时间 array_rc[0]=90-90; array_rc[1]=170; array_rc[2]=90-90; array_rc[3]=170; array_rc[4]=90+90; array_rc[5]=170; rc_moto_control(array_rc); delay(50); array_rc[0]=90; array_rc[1]=170; array_rc[2]=90;
1.1 引言 我们知道,对于任何一个机器人系统来说,机构是它的“躯体”,控制系统则是它的“大脑”和“神经系统”,一个设计合理的机器人机构加上一个有效的控制系统,机器人才能成为一个名副其实的、“活生生”的机器人,控制系统的性能直接决定着机器人整体功能的实现和性能的高低。机构和控制系统是机器人不可分割的两个部分,在机器人设计过程中,它们始终相互影响,一个合理的机构才能将控制系统的性能完全发挥出来,同时,一个能与机构相匹配的良好合理的控制系统才能充分发挥机器人机构的特点,模块化可重组移动机器人是一种机制特点非常鲜明的机器人,它由多个一样的模块连接而成,每个模块都是完整的功能单元,能通过模块重组改变自身形态按照不同的步态进行移动。因此,控制系统的设计将要体现模块化机器人模块化、可重组的特点,这样才能发挥模块化机器人的性能。本文基于国家高科技研究发展计划(863)计划课题“模块化可重组机器人技术研究”,其任务就是为模块化机器人设计一个合乎机器人特点的控制系统。 本文将在分析模块化可重组移动机器人特点的基础上,将提出一个“模块化分布式控制系统”(MDCS:Modular Distributed Control System)的概念,并完成机器人控制系统的设计。 1.2 模块化机器人 模块化可重组移动机器人(Modular Reconfigurable Robot)(在下文中简称为模块化机器人)是指能够改变外形和运动方式的机器人系统。模块化机器人的基本思想就是:一个机器人由若干个相同的简单模块组成,它能根据任务的需要或外界环境的变化而对模块进行重组,从而改变自身的形状和运动姿态以适应不同的任务或不同的环境。 1.2.1 模块化机器人的提出 从机器人诞生到本世纪80年代初,机器人技术经历了一个漫长缓慢的发展过程,到了90年代,随着计算机技术、微电子技术、网络技术等的快速发展,机器人技术得到了飞速发展。除了工业机器人水平不断提高之外,各种用于非制造业的先进机器人系统也有了长足的进展。机器人技术已成为高科技应用领域中的重要组成部分,它正向着具有行走能力、对环境自主性强的智能机器人发展方向。作为新一代的智能机器人,不仅要有感知、推理、判断等能力,还要有强健的“四肢”——运动执行机构。现在的移动机器人大都是借助轮子或者机械腿作为运动执行机构,它们的共同缺点是运动方式比较单一,对地形(特别是未知环境)的适应性不强。例如,机械腿式机器人行走时,当碰到比较松软的地形(如沙地)时,它就无法很好地进行移动。模块化可重组移动机器人就是为了克服这些传统机器人的固有缺点而被提出的,它是一种高度模块化、可重构变形的移动机器人。 1.2.2 模块化机器人的特点 模块化可重组移动机器人,顾名思义,其最大的两个特点就是:模块化和可重组性。 模块化——即模块化机器人设计的中心思想。机器人由若干个相同的模块组成,每个模块都是一个相对独立完整的单元实体,模块由电源、传感、控制、动力、通信等几个单元组成,能独立实现一些简单的功能并能和其他模块进行通信。 可重组性——机器人根据地形环境的改变或任务的需要而对自身的若干模块进行重组从而改变自身形态和运动方式。 除了模块化和可重组特点以外,模块化机器人还有着系统设计简单化、造价低、可替代性、开放性、可自动修复以及强健性和高稳定性等特点。 系统设计简单化、造价低。由于组成机器人的模块数量较多(几十个到几百甚至成千上万),整个机器人所要实现的功能被分离到众多的模块上,只要求每个模块实现有限的简单功能,因此,模块的结构就可以相当简化,其造价也相当低廉。而整个机器人系统由这些标准模块
大学 专业实践课题:四足追光机器人 姓名: 学院:机械工程学院 专业:机械设计制造及其自动化 班级: 学号: 指导教师:
四足追光机器人 一、实验目的 用“创意之星”机器人套件组装可以进行追光行走的四足机器人; 二、实验套件(创意之星) 1.机械结构:基本结构件、舵机动力关节、可转向轮子、机械爪等; 2.控制系统:控制卡、舵机、直流电机、各类传感器、电源等; 3.控制软件:NorthSTAR 图形化开发环境 三、实验步骤 1、确定其基本功能 基本功能: a.在平地上通过步态设计,可以正常迈步行走。同时头部传感器检测前方光源,便于及时调整运行动作,追光行走。 b.当左侧红外线传感器检测到光源强于右侧红外线传感器检测到的光源时,机器人运行步态会改变,控制机器人左转。右侧的光源强于左侧的光源时用同样的原理控制机器人右转。 c.当两侧均检测到光源亮度相等时,调整步态,追光机器人会向前走。直至检测不到光源停止,再控制向后退。
2、机构设计 整个巡视机器人由大致三个模块组成: a.由8个舵机组成四足机器人的4条腿模块; b.由2个舵机组成四足机器人尾部部分; c.由2个红外接近传感器和1个舵机组成的感应模块。 3、机构的装配 整个四足避障机器人由1个控制板,1个舵机和两个红外接近传感器组成可转动头部,8个舵机组成主要的4条机械腿,由两个舵机构成尾部部分。整个四足机器人共由11个舵机、两个红外接近传感器及“创意之星”机器人零部件组成。 安装可分为零件的安装,部件的组装以及最后的总装过程。根据预先设计好的机器人结构方案,组装四条腿的部件、头部、尾部以及机器人主体部分,最后组装到一块,形成完整的整体结构。 4、连接电线 由于我们此次使用的是创意之星的标准套件,舵机接线、传感器模拟与数字端口的连接都及其方便简单。 5、设置各个舵机的限制参数 一方面保护所使用器件的性能,防止过载或错误操作而将其损坏;另一方面
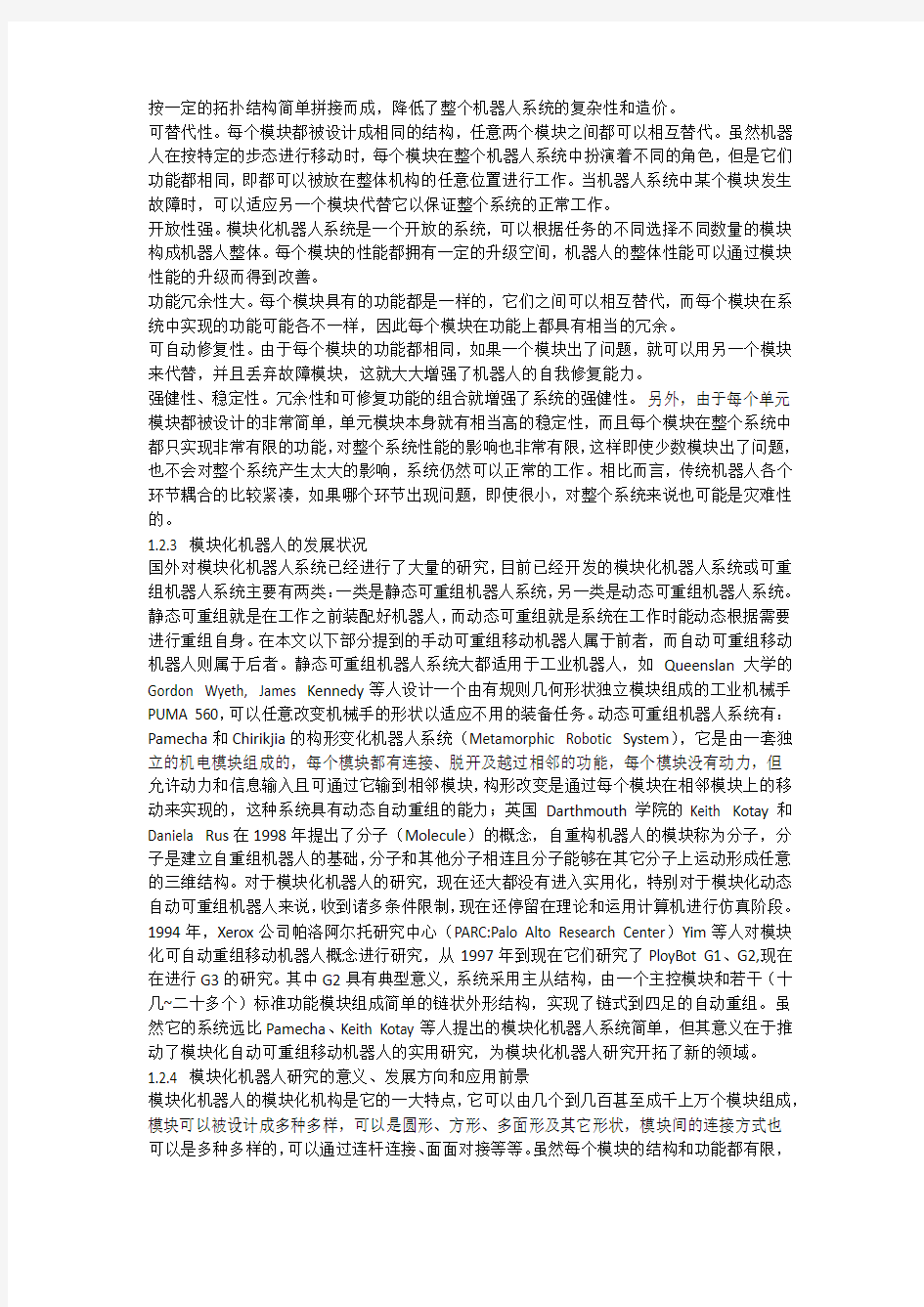
工业机器人机械结构模块化设计 发表时间:2019-08-05T15:48:34.500Z 来源:《基层建设》2019年第15期作者:林积新 [导读] 摘要:本文在对市场上常见的各种工业机器人进行功能分析前提下,根据其结构不同进行模块化划分,将工业机器人按通用模块的不同划分为六种模块,分别是终端执行器、绕z轴旋转臂、绕x(y)轴俯摆臂、沿X轴平移、平移转动、升降底座、AGV移动平台六种模块。 身份证号码:44098219890928XXXX 摘要:本文在对市场上常见的各种工业机器人进行功能分析前提下,根据其结构不同进行模块化划分,将工业机器人按通用模块的不同划分为六种模块,分别是终端执行器、绕z轴旋转臂、绕x(y)轴俯摆臂、沿X轴平移、平移转动、升降底座、AGV移动平台六种模块。当客户提出不同的机器人设计需求时,仅需按照其实际工况和技术要求来对接合适的模块种类,然后按照相关的技术标准完成模块装配,可以迅速完成客户所需的工业机器人设计。本文结合实际应用例子,论述了工业机器人模块化设计在提升设计效率的作用,为以后的工业机器人在生产应用中提供了一定的借鉴和参考价值。 关键词:工业机器人;模块化设计;效率 引言 随着中国的“中国制造2025”目标的提出,很多研发企业都围绕工业机器人的实际应用需求,在开发新的复合市场需要的工业机器人产品加大投入。随着设计技术的进步,设计机器人时标准化、模块化也是必不可少的内容,为机器人快速响应多样化需求打下基础。同时,也有利于进一步扩大机器人的实际应用市场。根据现今工业机器人的发展推测,将来的30年工业机器人技术都将是一个高速增长时期,任何一个企业只要能够设计制造出符合当今社会迅速变化的工业机器人,将占领大量的未来市场,赢得丰厚的市场回报。但是就目前而言,工业机器人的设计周期长、投资成本太高,其对应的应用范围局限性较大,以上这些限制因素都使的它们难以适应当今速变化的市场需求。所以工业机器人模块化设计在未来提供设计效率上尤为重要。 一工业机器人模块化划分 (一)模块划分的方法和理论 本文在讲过长期的市场调查以及工业机器人的功能分析过程中,通过大数据分析以及总结,将机器人产品详细的划分成了具有特定作用的但又相对通用的功能模块,同时也根据相关的标准确定了其对应的定义模块接口和要求。因此模块化划分工业机器人,需要考虑到以下三点因素:第一,模块划分的基本原则就是用最少的模块组合最多的产品;第二,所划分的模块其结构和功能都是独立以及完整的;第三,为了使同功能的模块可以互换以及不同的模块可以组合,所以所划分的模块其组合性以及互换性都要较高。 (二)模块划分及其功能 本文这次就以关节型机器人为例,进行相关的论述和分析,关节型机器人其主要的工作原理就是连杆利用关节交替连接而成。通过大数据对其的总结分析,可以将其分成六个模块,所划分的各模块以及其对应的解析如下图1所示。通过图一中的解析,可以确定其和机器人连杆平行的轴是z轴,而对应的垂直于机器人连杆的轴则是z、y轴。 图1 机器人模块 图1中的AGV智能移动模块(序号),已经成熟应用到工业生产和物流业中,能自主导向运载机器人移动特定区域;升降平台模块(序号2)则安装在AGV模块上,支撑机器人增大其在垂直方向的工作空间;绕Z轴旋转模块(序号3)则提供机器人在水平方向的圆周运动;平移模块(序号4)增加机器人在同一垂直面上的运动空间;绕X、Y以及在X轴的平移模块(序号5、6、7)增加了机器人在微小空间的自由度,更好地满足工作需求。终端执行器(序号8)可以分为吸附式、机械夹持式、其他三种类型,可以执行直接作业的功能。通过分析可以得出,工业机器人不同功能均可分解为以上若干模块的组合,为模块化设计提供依据。 二、如何实现模块化设计 (一)模块化设计流程 想要进行工业机器人的模块化、数字化、参数化设计,那么就要先有足够的符合用户需求的并且根据实际工况来划分完美的模块种类、数量和装配方式,这样才可以根据客户的需要来逐项确定各模块的尺寸和布置形式,而其尺寸和布置形式确定后,工业机器人的机械本体结构也就是设计完成了。本文提供如图3图示模块化工业机器人的设计流程。
百度文库 大连大学 本科毕业论文(设计)开题报告 李洋流 论 文 题 目: 学 院: 专 业、 班 级: 学 生 姓 名: 基于博创创新平台的家用清洁机器人设计 机械工程学院 机械设计制造及自动化机英 092班 卫斌乐
2013年3月20日填 、选题依据 1 .论文(设计)题目: 基于博创创新平台的家用清洁机器人设计 2.研究领域: 单片机及传感器系统设计 3.论文(设计)工作的理论意义和应用价值 当代科学技术发展的特点之一就是机械技术,电子技术和信息技术的结合,机器人就是这种结合的产物之一。现代机器人都是由机械发展而来。与传统的机器的区别在于,机器人有计算机控制系统,因而有一定的智能,人类可以编制动作程序,使它们完成各种不同的动作。随着计算机技术和智能技术的发展,极大地促进了机器人研究水平的提高。现在机器人已成为一个庞大的家族,科学家们为了满足不同用途和不同环境下作业的需要,把机器人设计成不同的 结构和外形,以便让他们在特殊条件下出色地完成任务。机器人成了人类最忠实可靠的朋友,在生产建设和科研工作中发挥着越来越大的作用。 家庭清洁机器人不但能够代替人乏味的体力劳动,还有其他人们所不具备的优点,可以 24小时甚至更长时间连续重复运转,还可以承受各种恶劣环境。因此,家庭清洁机器人是人 体局部功能的延长和发展。21世纪是敏捷制造的时代,家庭清洁机器必将在敏捷制造系统中 应用广泛。 4?目前研究的概况和发展趋势 随着现代化生产技术的提高,机器人设计生产能力进一步得到加强,尤其当机器人的生产与柔性化制造系统和柔性制造单元相结合,从而改变目前机械制造的人工操作状态,提高了生产效率。就目前来看,总的来说现代机器人有以下几个发展趋势: 1)提高运动速度和运动精度,减少重量和占用空间,加速机器人功能部件的标准化和模块化,将机器人的各个机械模块、控制模块、检测模块组成结构不同的机器人; 2)开发各种新型结构用于不同类型的场合,如开发微动机构用以保证精度;开发多关节多 自由度的手臂和手指;开发各类行走机器人,以适应不同的场合; 3)研制各类传感器及检测元器件,如,触觉、视觉、听觉、味觉、和测距传感器等,用传感器获得工作 对象周围的外界环境信息、位置信息、状态信息以完成模式识别、状态检测。并采用专家系统进行问题求解、 动作规划,同时,越来越多的系统采用微机进行控制。 、论文(设计)研究的内容
电子科技大学 “创意之星”模块化机 器人实验 机械电子工程学院 2010 年3 月
目录 实验一MULTIFLEX控制卡编程实验 (1) 实验二多自由度串联式机械手 (10) 实验三简易四足机器人 (15) 实验四轮式机器人运动控制实验 (19) 实验五机器人传感系统实验 (24) 实验六自主避障机器人实验 (27) 实验七追光的机器爬虫 (37) 实验八开放性实验:设计自己的机器人 (48)
实验一MultiFLEX 控制卡编程实验 实验目的 (1)了解MultiFLEX控制卡的基本结构; (2)了解WinAVR+AVRStudio编译环境的使用; (3)了解C 语言环境下编写控制程序,并编译、下载到MultiFLEX 控制器中执行的流程 (4)熟悉关于AVR 单片机的io 口有关的寄存器的概念、作用 (5)理解函数gpio_mode_set(),write_gpio(),read_gpio()的定义,掌握其用法 (6)熟悉并掌握利用2 中的3 个函数控制MultiFLEX 控制卡的16 路IO 口实验环境: UP-MRcommander 控制软件 实验器材: 计算机1台 MultiFLEX 控制卡1块 控制卡电源线1根 串口下载线1根 232电缆1根 USB转232电缆1根 舵机4个 舵机延长线4根 实验步骤 1 WinAVR 以及AVRStudio 软件的安装 首先大家打开实验指导书配套光盘,在“MultiFLEX 控制卡\AVR MCU 开发资料”目录下,打开“WinAVR”文件夹,双击 “WinAVR-20060421-install.exe”完成WinAVR 的安装;然后打开“AVR Studio”文件夹,根据文件夹里面的安装说明进行AVRstudio 的安装,并将其升级到最新版本。 注意:请先安装WinAVR 再安装AVRStudio,这样WinAVR 才能自动嵌入到AVRStudio 中。 2 用3AVRStudio 建立一个工程 首先打开我们刚刚安装好的AVRStudio,会出现如下窗口:
创客中心建设方案 1.创客教学背景 “创客”源于英文单词Maker,在中文里“创”的含义是:创造、首创、开创、创立,它体现了一种通过行动和实践去发现问题、解决问题的做事原则。“创客”就是坚守创新,持续实践,乐于分享的一群人。 2015年1月28日,********、国务院总理**主持召开国务院常务会议,确定了支持发展“众创空间”的多项政策措施,明确要求“打造良好创业创新生态环境。培育创客文化,让创业创新蔚然成风”。 2015年3月2日,科技部“发展众创空间推进大众创新创业电视电话会议”中进一步强调,推进大众创新创业是新时期科技工作的重要任务,要按照党**、国务院决策部署,努力营造良好的创新创业生态环境,帮助大众创新创业者应用新技术、开发新产品、创造新需求、培育新市场、打造新经济。 要培育创客文化、广泛推广创客教学并不是中国特色的新事物。在过去几年内,美国高校中的学术性创客空间和制造类实验室迅速多了起来。而一些K12(美国基础教育的通称)学校也纷纷尝试在图书馆设立创客空间,或者改装教室以适应基于项目和实践的学**。 其实,对学校而言,开展“创客”教学更像是传统实践教育在数字时代的“升级版”,其精髓是将学生训练成为能独当一面的工程师,提高学生应对复杂应用需求的综合应对能力,加深学生的专业技能。这种人才培养模式陆续在德国、美国的工程院校、技术院校和科技院校中推进,取得了很好的效果。它把教学与实践、教室与工作室、知识获取和能力锻炼、教育文化和企业文化多方面融合,开创一种新型的人才培养模式。可以想象,如果每个科技类专业学生都具有创客精神,将会产生多大的价值空间。
2. 建设创客中心的构想 学生是创客的主体,在学生中间,有少数的创客,一部分很向往,绝大多数表示支持。让创客们继续坚持,让大多数人参与进来,如果没有大力组织推动,就不太可能。简单讲,对学生而言不缺乏积极性和钻研兴趣,缺乏的是氛围和场地。因此,创客中心应该满足学生群体的基本需求。 对于教师日常教学而言,创客可以激发学生的学**主动性,带着项目任务和实践中的目标去学**,能让教学过程体现出更大的趣味性、深度和价值。通过创客中心的建设,产生一种新型的教学方式或文化并延续下来,也是教学改革创新的需求。 对学校而言,创客没有专业的隔阂,创客文化的传播是一个学校整体性的活动。如果将创客教育作为一种人才培养的模式,创客精神就会逐渐发展为学校的一种学**氛围,产生这种氛围就应该是创客中心建设的意义。 从学生、教师、学校三个层次的需求出发,构建一个创客中心的平台,这个平台能给入门级的学生提供一个训练场所,通过项目推动,引导学生动手实践,实现想法,项目可由老师的研究课题延伸,或自由命题,重在领入门和培养兴趣,对于大部分学生,通过开课做普及性的培训,对于拔尖学生,有一个固定的活动场所和团队组织。 3. 建设的目标 第一,明确一个方向:广义的创客没有学科的限制,增加了建设的难度。根据高等理工科类院校的实际情况,机电一体化、机器人技术涵盖了机械、电子、计算机信息等学科技术,覆盖面广、综合性强,具有一定的技术深度,适合全面推广。 第二,确定两个目标:实际创客中心针对的是两个群体,一个是没有创客概念、但有兴趣愿意尝试的,对于这一群体,重点是“领进来”进行“培养基础”,培养之后,有一部分人能坚持,掌握了一定的技能,并已经融入创客文化的,成为另外一个群体,对这个群体的培养应该是着重引导创新。因此,创客中心建设的核心目标应该是“培养基础”和“引导创新”。简称“培养”、“创新”。
SolidSnake-II ——模块化机器蛇概述一、应用背景: 近几年来,仿生机器人学正在机器人领域占有越来越重要的位置,蛇形机器人由于其结构的特殊性,已成为仿生领域的研究热点。蛇形机器人在战场上的扫雷,爆破,矿井和废墟中探测营救,管道维修以及外行星地表探测等条件恶劣,且要求有高可靠性的领域有着广阔的应用前景。模块化设计和高冗余度设计等新思路的提出和逐步完善,使蛇形机器人成为研究的亮点。 二、SolidSnake II 实验样机概述: SolidSnake II 结合了国内外蛇形机器人的发展现状,充分考虑了蛇类生物的运动特点,从仿生学的角度,结合机器人动力学和摩擦学等的相关理论,建立了基于行为控制理论的蛇类运动学模型,把蛇类生物的复杂运动形式化解为局部的、简单的行波状态,并以固定的相位差沿蛇体进行传播。采用中央处理机(即蛇的大脑)集中控制的方式把各种运动方式进行合成,实现了机器蛇的蠕动、游动、侧移、侧滚、抬头、翻越障碍物等运动形式。在对蛇类运动机理深入研究的基础上,得出了利用杆状结构的角度变化和运动时延,相位差去控制机器蛇运动的速率和运动方向的规律,并在实验中得到了验证。 三、solid snake – II 创新点详述 一)、模块化的机构设计: 采用模块化的机构设计,可以很快的 组装一条新蛇,而且结合电路系统,可以 实现任意节数的组合,以适应不同的应用 场合。单元体模块组成部件有:两节壳体, 两个伺服电机,一块从机控制板。 机械对接接口非常简单,只需要五个螺钉 即可对接一个单元体。 一个模块化单元体为一个正交 的关节,有两个正交方向的自由度, 在机械结构与控制结构上均自成一 体,通过总线与其他从机及主机通 讯。 标准配置的SolidSnake-II 带有 外接电池。但用户可以自行加装电池 到每个单元关节,以便无缆运行。
创意之星机器人说明书
目录 1结构套件简介 (3) 1.1 结构件概述 (3) 1.2 ConnFLEX连接结构 (3) 1.3 不同版本......................................................................................................... .. (4) 1.4 使用零件3D模型 (6) 2控制器及电源 (7) 2.1 MultiFLEX?2-A VR控制器 (8) 2.2 MultiFLEX?2-PXA270控制器 (9) 2.3 电池和直流电源 (12) 3传感器 (12) 3.1传感器的信号类型及电气规范 (13) 3.2“创意之星”传感器接口 (14) 3.1接近传感器 ...................................................................................................... (16) 3.2 测距传感器 (19) 3.3 声音传感器 (24) 3.4 碰撞传感器 (26) 3.5 倾覆传感器 (26) 3.6 温度传感器 (27) 3.7 光强传感器 (27) 3.8 灰度传感器 (28) 3.9 视觉和语音传感器 (28) 4执行器 (29) 4.1 CDS5516机器人舵机 (29) 4.2 CDS5401大扭矩R/C舵机 (32) 4.3 BDMC1203电机驱动模块 (33) 4.4 Faulhaber大功率减速电机 (34) 5 NorthSTAR 图形化开发环境 (35) 5.1 安装及使用介绍 (35) 5.2 使用流程图开发 (39) 5.3 手写代码开发 (46) 5.4 调试与在线监控 (47) 6 其它部件 (54) 6.1 UP-Debugger 下载调试器 (54) 6.2 WiFi 无线网卡或以太网线缆 (55) 6.3 ZigBee无线模组 (56)
Inspire your Imagination 创意之星?模块化机器人套件 完全介绍 目录 目录 (1) 1 产品介绍 (2) 1.1 概述和主要特点 (2) 1.2 适用领域 (2) 1.3 创意之星可以构成这些机器人,并且更多! (3) 1.4 产品照片 (6) 2 适合不同用户的三个版本 (7) 2.1 创意之星?机器人套件标准版 (7) 2.2 创意之星?机器人套件入门版 (9) 2.3 创意之星?机器人套件高级版 (11) 3 关键技术介绍 (14) 3.1 创新的结构连接方式 (14) 3.2 MultiFLEX2控制器 (15) 3.3 NorthSTAR软件开发环境 (17) 3.4 机器人舵机 (19) 4 “创意之星”机器人套件组装实例图片 (21)
1 产品介绍 1.1 概述和主要特点 博创科技刚刚推出了最新的UP-InnoSTAR?创意之星?机器人套件产品,以替换上一代“创意之星”产品。该套件是一套用于开展机器人创新实验的模块化机器人套件。分为入门版、标准版和高级版,并有多种配件可选购。 “创意之星?”机器人套件的总体特点类似LEGO Mindstorms?NXT套件,都是具备多种基本“积木”构件的模块化零件套装,包括多种数百个结构零件,一个控制器,多个电机、舵机执行器,多种传感器,以及电池、电缆等附件。用这些“积木”可以搭建出各种发挥想象力的机器人模型来。 所不同的是,“创意之星?”机器人套件主要为创作机器人而设计。具备32位520MHz 的处理器,可处理视频、语音、大容量存储;支持最多254个CDS5500总线式舵机(也可作减速电机使用,指令兼容Robotis的Dynamixel AX12+),并同时具备多个I/O和A/D转换器,以及USB、Wi-Fi等端口。另外,机器人的结构件和创新的连接方式专为创作机器人而设计,连接刚度和结构强度不逊色于铝合金构件,并且连接非常方便。 这样的一套机器人套件可以搭建出无数种机器人构型! “创意之星?”机器人套件配有《构型搭建指南》和《机器人编程实验指导书》等文档,并提供所有构件的3D模型,以及20多种典型构型的装配体3D模型,便于用户学习,并可用于搭建虚拟样机。通过多种典型的机器人构型及其控制系统搭建范例,由浅入深的指引学生搭建机器人结构并学习传感、执行、控制原理和应用,学习机器人控制算法,并发挥创造力,搭建出独特的机器人样机。 “创意之星?”机器人套件具有多种开发方式。初学者可以使用流程图编程软件来给机器人编程;高级用户则可以使用C语言来编程,并可以使用软示波器、3D仿真工具来设计机器人行为,具有极高的透明度和灵活性。 在标准版和高级版两个版本中,还提供MultiFLEX?2控制卡的电路图和参考源程序,以便学生用C语言编写复杂的机器人程序,也可制作自己的机器人控制器。用户可以根据我们提供的技术资料搭建3D虚拟样机、开发自己的机器人控制卡、传感器等等,经由模仿,走向自主创新! 1.2 适用领域 l适合作为大学工科学生的创新实训课程教具和实验器材。 l适合作为大学工科学生的课程设计或者毕业设计平台。 l适合机器人研究者在用于验证理论算法、验证学术论文的结论。 l适合机器人研究者在开发新的机器人之前搭建快速原型,验证原理和可行性。 l适合机器人发烧友用于创作独特的、自己的机器人样机。 l适合初中、高中学生的机器人创作和机器人相关实践活动。
模块化机器人竞技 一、参赛范围 1.参赛组别:小学组、初中组、高中组(含中职)。 2.参赛人数:1~2人/团队。 3.指导教师:1人(可空缺)。 4.每人限参加1个赛项、1支队伍。 二、竞赛流程 1.报名:参赛选手按地方组委会规定的方式和时间进行报名,报名成功的选手有参加地方选拔赛的资格。 2.地方选拔:依据全国组委会给定名额,确定地方入围选手,并按规定时间报送全国组委会。 3.全国决赛:入围选手现场确定一等奖、二等奖、三等奖,入围但未能到达决赛现场参赛的选手视为弃权,不予评奖。 三、竞赛环境 1.编程系统:CellRobot EDU电脑端程序等能够完成竞赛的编程软件。 2.编程电脑:参赛选手自带竞赛用笔记本电脑(Windows 7及以上操作系统),并保证比赛时笔记本电脑电量充足(可自备移动充电设备)。 3.移动设备:参赛选手自带装有CellRobot软件的手机或iPad,仅为比赛时操控机器人使用,不得用于信息传递或存储。
4.禁带设备:U盘、对讲机。 5.禁止携带资料、笔记及任何可以复制文件的工具进入竞赛现场;可以携带空白A4纸2张、签字笔或铅笔进入竞赛现场。 四、竞赛场地
1.场地尺寸:总长3000mm,总宽2000mm。 2.场地区域:比赛场地一共分为两个区域:自动任务区和手动任务区。自动任务区的任务:巡线任务、车库停车任务;手动任务区的任务:翻越障碍、物资搬运任务、折返任务。比赛固定任务是自动任务区的巡线任务和车库停车任务,非固定任务是手动任务区的任务,具体任务选择由裁判在现场比赛开始前,根据选手组别临时抽取。 3.各场地区域具体设置如下: (1)巡线任务区为平面,长和宽均为2000mm,平面上有黑色S 型轨迹线,线宽60mm,轨迹线两侧10cm处(无确定地点)会出现“陷阱旗子”,机器人在巡线过程中如果撞倒旗子,会减掉相应的分数。 (2)车库停车任务区,单个车库长和宽约为330mm,车库区整体长和宽均为1000mm;车库区最右侧,每个车库正前方约600mm处都有1块挡板,作为车库指示牌。 (3)翻越障碍任务区:障碍区由一块长1000mm、宽500mm、高60mm的木板构成。 (4)物资搬运任务区:该区域长和宽均为1000mm,区域中心位置为仓库,用来存放货物,仓库直径为300mm;区域四个直角方向分别有4个物资,物资区域直径为100mm。 (5)折返任务区:该区域长和宽均为1000mm。 4.起点与得分区: 起点位于比赛场地巡线任务的起点,得分区详见下文的“七、评分标准”。
万方数据
万方数据
万方数据
工业机器人模块化设计研究 作者:陈航, 殷国富, 赵伟, 周晓军, CHEN Hang, YIN Guo-fu, ZHAO Wei, ZHOU Xiao-jun 作者单位:陈航,殷国富,赵伟,CHEN Hang,YIN Guo-fu,ZHAO Wei(四川大学,制造科学与工程学院,四川,成都,610065), 周晓军,ZHOU Xiao-jun(成都广泰实业有限公司,四川,成都,610165) 刊名: 机械 英文刊名:MACHINERY 年,卷(期):2009,36(3) 被引用次数:2次 参考文献(6条) 1.郭洪红工业机器人技术 2006 2.贾庆轩;杨磊;孙汉旭;马国伟 郐永涛机器人模块化关节的设计与实现[期刊论文]-机电产品开发与创新 2005(06) 3.费燕琼;赵锡芳;徐卫良机器人模块化的结构设计研究[期刊论文]-机器人 1999(05) 4.吴振彪工业机器人 1997 5.张兴国;刘明工业机器人组合式模块化结构设计研究[期刊论文]-制造业自动化 2008(07) 6.单以才机器人机械操作臂的模块化设计及其控制的研究[学位论文] 2003 本文读者也读过(5条) 1.张兴国.刘明.ZHANG Xing-guo.LIU Ming工业机器人组合式模块化结构设计研究[期刊论文]-制造业自动化2008,30(7) 2.焦恩璋经济型模块化工业机器人的前期研究[期刊论文]-制造业自动化2002,24(2) 3.赵亮.闫华晓.俞剑江.ZHAO Liang.AN Hua-xiao.YU Jian-jiang基于关节模块的模块化工业机器人[期刊论文]-组合机床与自动化加工技术2008(9) 4.杨彦涛.孟令启.吴晓铃.YANG Yan-tao.MENG Ling-qi.WU Xiao-ling输灰管道清洗机器人系统的模块化设计[期刊论文]-郑州大学学报(理学版)2008,40(1) 5.梁飞华.邓宇.曾亚森.邢镇容AutoCAD.VBA与MATLAB环境下工业机器人仿真系统[期刊论文]-茂名学院学报2005,15(3) 引证文献(2条) 1.刘爽.殷国富.李雪琴.周晓军可重构模块化工业机器人构形及其静力学分析[期刊论文]-机械设计与制造 2011(11) 2.舒畅.熊蓉.傅周东基于模块化设计方法的服务机器人结构设计[期刊论文]-机电工程 2010(2) 本文链接:https://www.doczj.com/doc/2c17391004.html,/Periodical_jx200903020.aspx
一、“创意之星机器人套件”课程体系介绍 以“创意之星模块化机器人套件”为依托。展开相关实验教学。 1.1 一般性实验 以机器人形态为载体,激发学习兴趣和动手参与能力。 1.2.基础课程、专业课程实验教学课程体系参考 实训室可以为工科专业的很大一部分课程提供实验环境。 1、在开始理论教学之前,先展示有趣味、有吸引力的机器人构型,比如机器狗、六足爬虫、巡线小车等。这个过程让学生明白此门课程的实际运用价值,了解实际运用方式,调动学生学习积极性。 2、开课的过程,穿插合适的实验课程,阶段性的进行知识巩固和加深。 3、在课程末期,以实验为重要的成绩考核方式,通过实际动手操作来考核学生的实际掌握程度。
1.3.以实践为核心的项目式教学模式 项目式教学法将传统课程中的系统、完整的知识体系转化为若干个“教学项目”,围绕着这些项目来组织教学,使学生参与项目完成的全过程来进行学习。项目式教学强调以教案为重点过渡到以完成项目为重点,其主要特点在于避开传统的学科体系教学知识的完整性和系统性。始终围绕着项目是否能够完成而进行,对知识结构的要求本着“够用”的原则,重点在于培养学生的动手的能力、独立获取信息的能力和自主构建知识的能力。 项目式教学模式面向工程项目、面向真实应用,注重实践能力、团队能力的培养,将培养优秀设计师、工程师的思想贯穿整个课程体系和教学过程。在课程设置上体现了电子、信息、计算机、系统软硬件设计、单片机、嵌入式系统等方面的知识运用,使学生能够融会贯通本科所学知识,同时具有较强的实践能力与工程应用能力。 项目式教学模式所强调的动手实践及创新能力的培养尤为重要,提高社会对学生的认可度及学生就业率起到至关重要的作用。
目录 1.无差别擂台机器人 2.双轮平衡小车 3.能够识别并捡起乒乓球的机器人
1.无差别擂台机器人 综述: 老师要求我们搭建一台擂台机器人,具体要求如下: 搭建的机器人长度不超过40厘米,宽度不超过20厘米,高度不超过30厘米。 在黑胶带围成的指定区域里活动,不能出胶带区域,否则失败;需要能够推动对方,将对方推出黑胶带围成的区域即获胜。 要尽量避免自己被推出指定区域,采取一些必要方法。 根据要求,做出以下设计: 要在黑胶带围成的制定区域里活动不超出范围,就需要有传感器进行活动范围边缘的检测。当机器人发现已经靠近边缘时立刻采取行动(停止、掉头或转弯)。黑胶带贴成的区域边缘是与普通地面相比是有灰度变化的,我们可以在机器人底部装上灰度传感器,探头向下,来判读机器人覆盖区域的灰度变化,从而判读机器人相对场地的方向。可以通过整体灰度值来判读机器人位置是不是靠近边缘,如果机器人靠近边缘就马上做出相应动作。 要能够发现对方。能够发现对方的实现方法很多,这里我们采用红外接近传感器来发现对手。 要能够将对方推下擂台。首先考虑推到对方机器人要进行的过程:首先要发现对方,其次贴上去推动对方。要推动对方必须要有足够的动力。增加动力,可以考虑:1.增加驱动轮(由四个增加为六个甚至更多);2.增加摩擦力(用胎面宽的轮胎,增加轮子数量,增加机器人重量)。如果动力不足,我们的机器人很可能被对方的机器人推着倒着走,如果摩擦力不够,机器人在推对方的时候轮子会打滑,轮子一直在转,但小车就不能往前走。 需要避免自己被推出指定区域。如果我方机器人在前进过程中北对方机器人从后方推挤,那么对方可以很轻松的把我方机器人推出指定区域。所以要设置相关程序,在察觉到被推挤时能够采取相关手段避开推挤。此外,适当增大机器人与地面摩擦力也对防止自己被推出标定区域以外很有作用。
模块化机器人设计 摘要 如今,机器人的发展突飞猛进,机器人服务已经覆盖了人们生活、工作、娱乐的方方方面。随着人类的需求的不断增加,对机器人领域的探索也越走越远,机器人模块化技术已在各个领域的产品研究和开发中广泛应用。于传统机器人相对比,模块化机器人柔性更好,自修复能力强柔性高,且容错性强、成本较低。模块化结构较简单,便于加工,各模块能互相替换,组装快捷简便。由于模块化机器人结构和功能的可重组性,对任务和环境有很强的适应能力。采用模块化技术,有利于机器人的维护和保养,缩短了机器人设计的时间。因此,本文将采用模块化的方法开发一种新机器人系统,希望有利于改善目前机器人控制复杂、通用性差和操作繁琐等问题。本文一共分为六个部分,第一部分绪论主要概括模块化机器人的研究背景、意义和国内外模块化机器人研究现状,第二部分探讨了机器人模块化的设计原理和方法,第三部分主要讨论了机器人控制系统设计,第四部分分析机器人主从控制策略。第五部分概述了机器人构型,最后进行了小结。 关键词:机器人;模块化;系统设计;构型
Nowadays, the development of robots is advancing by leaps and bounds. Robot service has covered all aspects of people's life, work and entertainment. With the increasing demand of human beings, the exploration of robot field is more and more far away. Robot modularization technology has been widely used in product research and development in various fields. Compared with the traditional robot, modular robot is more flexible, self repairing ability, high flexibility, and good fault tolerance and low cost. The modular structure is simple, easy to process, each module can replace each other, and the assembly is quick and easy. Because of the reconfiguration of modular robot structure and function, it has a strong adaptability to task and environment. Modular technology is beneficial to the maintenance and maintenance of robots, and shortens the time of robot design. Therefore, this paper will use modular method to develop a new robot system, in the hope of improving the complexity of robot control, low universality and tedious operation. This paper is divided into six parts, the first part is the introduction mainly summarizes the modular robot research background, significance and research status quo of inside and outside of the modular robot, the second part discusses the design principle and method of modular robot, the third part mainly discusses the design of robot control system, the fourth part of the analysis of the master-slave robot control strategy. In the fifth part, the configuration of robot is summarized, and finally a brief summary is made. Key words: robot; modularization; system design; configuration