三大主流开源硬件对比分析
- 格式:doc
- 大小:2.71 MB
- 文档页数:12
主流四大虚拟化架构对比分析云计算平台需要有资源池为其提供能力输出,这种能力包括计算能力、存储能力和网络能力,为了将这些能力调度到其所需要的地方,云计算平台还需要对能力进行调度管理,这些能力均是由虚拟化资源池提供的。
云计算离不开底层的虚拟化技术支持。
维基百科列举的虚拟化技术有超过60种,基于X86(CISC)体系的超过50种,也有基于RISC体系的,其中有4 种虚拟化技术是当前最为成熟而且应用最为广泛的,分别是:VMWARE的ESX、微软的Hyper—V、开源的XEN和KVM。
云计算平台选用何种虚拟化技术将是云计算建设所要面临的问题,文章就4种主流虚拟化技术的架构层面进行了对比分析。
形成资源池计算能力的物理设备,可能有两种,一种是基于RISC的大/小型机,另一种是基于CISC的 X86服务器。
大/小型机通常意味着高性能、高可靠性和高价格,而X86服务器与之相比有些差距,但随着Inter和AMD等处理器厂商技术的不断发展,原本只在小型机上才有的技术已经出现在了X86处理器上,如64位技术、虚拟化技术、多核心技术等等,使得X86服务器在性能上突飞猛进。
通过TPC组织在2011年3月份所公布的单机计算机性能排名中可以看出,4路32核的X86服务器性能已经位列前10名,更重要的是X86服务器的性价比相对小型机有约5倍的优势.因此,选择X86服务器作为云计算资源池,更能凸显出云计算的低成本优势。
由于单机计算机的处理能力越来越大,以单机资源为调度单位的颗粒度就太大了,因此需要有一种技术让资源的调度颗粒更细小,使资源得到更有效和充分的利用,这就引入了虚拟化技术。
当前虚拟化技术中主流和成熟的有4种:VMWARE的ESX、微软的Hyper—V、开源的XEN和KVM,下面将针对这4种虚拟化技术的架构进行分析1虚拟化架构分析从虚拟化的实现方式来看,虚拟化架构主要有两种形式:宿主架构和裸金属架构。
在宿主架构中的虚拟机作为主机操作系统的一个进程来调度和管理,裸金属架构下则不存在主机操作系统,它是以Hypervisor直接运行在物理硬件之上,即使是有类似主机操作系统的父分区或Domain 0,也是作为裸金属架构下的虚拟机存在的。
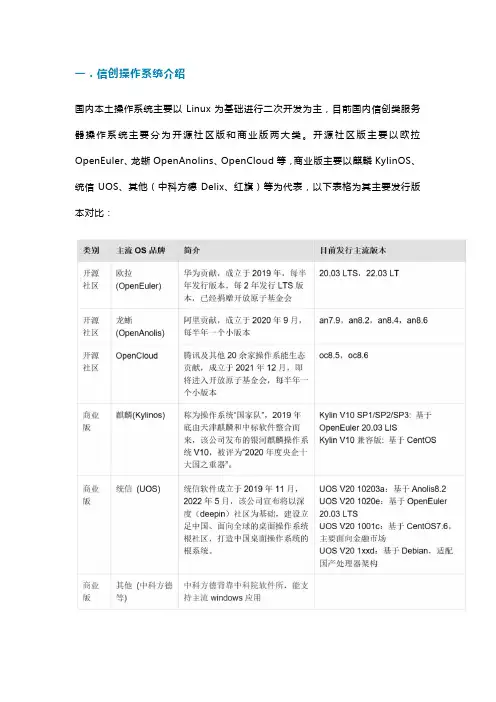
一.信创操作系统介绍国内本土操作系统主要以Linux为基础进行二次开发为主,目前国内信创类服务器操作系统主要分为开源社区版和商业版两大类。
开源社区版主要以欧拉OpenEuler、龙蜥OpenAnolins、OpenCloud等,商业版主要以麒麟KylinOS、统信UOS、其他(中科方德Delix、红旗)等为代表,以下表格为其主要发行版本对比:二.信创主流操作系统对比1. 当前国产操作系统发行周期对比2. 各信创操作系统功能对比3. 各信创操作系统性能对比基于Intel x86测试测试主机为浪潮NF5270M4 ,CPU 为Intel(R) Xeon(R) CPU E5-2650 v4 @ 2.20GHz 24 核,内存为DDR4-2400 MT/s Samsung 256G ,系统盘为rpm源替换->包替换->内核重引导->重启->验证5)迁移后观测通过监控工具观测主机负载、运行状态等,以对比迁移前后异常。
5. 麒麟、统信OS生态对比6. 影响操作系统的因素分享一下当前主流信创操作系统的特性情况:▪业务连续性统信、麒麟、龙晰、欧拉都具备较为活跃的社区、技术实力,均具备支撑业务系统使用及演进的能力。
▪场景适配度当前麒麟、欧拉在鲲鹏ARM生态支持较优,在多核生态软件方面性能表现好,选型时可以在不同的场景下开展更多针对自身业务场景的测试对比。
▪信创要求现阶段欧拉、麒麟自主可控性更高,但生态尚未成熟,迁移难度较大;统信、龙晰的自主可控稍弱,但迁移更方便,从长远考量,逐渐应过渡至原生国产信创的开源/商业OS。
▪稳定性、安全性、成熟度商业OS公司在安全修复能力、响应支撑成熟度方面要强于开源社区,但整体均具备24小时感知上游CVE,高危漏洞7日修复能力。
商业OS经大规模验证,开源版本验证较少。
▪成本因素开源OS 能够显著降低IT系统成本,推荐非核心业务系统优先选用成熟版本开源系统,如欧拉和龙晰。
三大主流框架的优缺点目前,三大主流框架是Angular、React和Vue.js。
它们在前端开发中广泛应用,各有优缺点。
1. Angular(优点):- 强大的功能:Angular 是一个完整的框架,内置了众多功能,包括组件化、依赖注入、模块化、数据绑定等。
这使得开发者可以更高效地开发复杂的应用程序。
- 强大的团队支持:Angular 是由 Google 开发和维护的,拥有庞大的开发团队和活跃的社区。
这意味着开发者可以获取到及时的技术支持,以及丰富的文档和资源。
- 全面的工具生态系统:Angular 提供了完整的工具生态系统,包括Angular CLI、Angular Material、Angular Universal等。
这些工具可以帮助开发者更方便地构建和部署应用程序。
- 跨平台开发:Angular 可以用于构建 Web 应用程序、移动应用程序和桌面应用程序。
它支持使用 NativeScript 和 Ionic等工具进行跨平台开发,从而帮助开发者节省时间和精力。
Angular(缺点):- 复杂度高:相比于 React 和 Vue.js,Angular 的学习曲线更陡峭,需要投入更多的时间和精力来学习和理解其概念和用法。
- 性能问题:由于 Angular 的庞大和复杂性,它的性能可能会受到影响。
特别是在处理大量数据或复杂的 UI 动画时,应用程序可能会变慢。
- 过于依赖框架:Angular 强调使用其提供的特定方式来开发应用程序,这意味着开发者可能需要按照 Angular 的规范和约束来开发,对于一些特殊的需求可能不太灵活。
2. React(优点):- 高性能:React 通过使用虚拟 DOM 和 diff 算法来提高性能。
它可以有效地处理大量的数据更新,并且只更新需要更新的部分,从而提供更好的性能和用户体验。
- 灵活性:React 是一个轻量级的库,它只专注于视图层。
这使得开发者可以更灵活地选择和集成其他库或解决方案,从而满足不同的需求。
服务器性能监测工具比较ZabbixNagios和Prometheus服务器性能监测工具比较:Zabbix、Nagios和Prometheus随着互联网技术的发展,服务器扮演着越来越重要的角色。
为了确保服务器的正常运行和高效性能,服务器性能监测工具变得至关重要。
在众多的服务器性能监测工具中,Zabbix、Nagios和Prometheus是备受关注的三个工具。
本文将比较这三个工具的特点和适用场景,帮助您选择最合适的服务器性能监测工具。
一、ZabbixZabbix是一款开源的企业级监控解决方案。
它提供了广泛的监控功能,包括网络、服务器、数据库、应用等方面的性能监测,并且具有强大的告警功能。
Zabbix的特点如下:1. 多样化的监控方式:Zabbix支持多种监控方式,包括主动监控和被动监控。
主动监控通过由Zabbix代理程序收集数据,而被动监控则是由被监控对象主动向Zabbix服务器发送数据。
2. 灵活的告警通知:Zabbix可以通过多种途径进行告警通知,比如电子邮件、短信、微信等,用户可以自定义告警规则和通知方式。
3. 可扩展性强:Zabbix的设计非常灵活,支持插件机制,可以方便地集成其他工具和扩展功能。
二、NagiosNagios是另一款广泛使用的服务器性能监测工具,同样也是开源的。
Nagios的特点如下:1. 高度可定制:Nagios提供了一个强大的配置文件,可以对监控项进行高度定制化的配置,并可以通过插件来扩展功能。
2. 强大的报警功能:Nagios可以通过电子邮件、短信、手机应用等多种方式进行报警,同时可以根据不同的情况设定不同的报警级别。
3. 高度稳定:Nagios经过多年的发展和完善,已经非常成熟和稳定,被广泛应用于各种规模的网络和服务器监控。
三、PrometheusPrometheus是一款新兴的开源监控工具,由SoundCloud开发。
Prometheus的特点如下:1. 多维度的数据模型:Prometheus采用了一种特殊的数据模型,可以灵活地进行数据查询和分析,并提供了强大的数据可视化功能。
4大主流CPU处理器技术架构分析1.x86架构:x86架构是由英特尔和AMD共同推出的一种处理器架构。
它是32位和64位处理器的主流架构,广泛用于个人电脑和服务器。
x86架构采用复杂指令集计算机(CISC)的设计思想,通过提供大量的指令集,能够直接执行复杂的操作,从而提高性能。
不过,由于复杂的指令集和多级流水线设计,x86架构的处理器功耗较高,且难以优化。
2.ARM架构:ARM架构是一种低功耗架构,广泛用于移动设备和嵌入式系统。
它采用精简指令集计算机(RISC)的设计思想,通过简化指令集和流水线设计,减少了功耗和芯片面积。
ARM架构具有高效能和低功耗的优势,在移动设备上取得了巨大成功。
它还采用了模块化的设计,可以根据需求选择不同的组件来构建处理器。
3. Power架构:Power架构由IBM开发,广泛应用于大型服务器和超级计算机。
Power架构采用RISC设计思想,通过减少指令数量和复杂度,提高了性能和效率。
Power架构也支持多线程和多处理器技术,可以实现高度的并行计算。
Power架构的处理器主要被用于高性能计算场景,如大数据分析、科学计算等。
4.RISC-V架构:RISC-V架构是一个开源的指令集架构,于2024年由加州大学伯克利分校开发。
RISC-V架构采用RISC设计思想,通过精简指令集和模块化设计,提供了灵活性和可扩展性。
RISC-V架构的指令集规范是公开的,可以任意修改和扩展,使得硬件开发者可以根据需求进行定制。
RISC-V架构对于嵌入式系统和物联网设备具有较大的潜力,也得到了学术界和开源社区的广泛支持。
这四种主流的CPU处理器技术架构各有优势和应用场景,选择合适的架构需要根据具体需求和应用来决定。
无论是个人电脑、服务器还是移动设备,处理器架构的选择都直接影响着性能、功耗和功能扩展性。
随着技术的不断发展,未来的处理器架构可能会进行更多的创新和突破,满足日益增长的计算需求。
三大主流框架的优缺点现在,JavaScript已经成为了前端开发的事实标准,而各种前端框架也应运而生,大大提高了前端开发的效率和质量。
而其中被广泛认可的三大主流框架分别是Angular、React和Vue。
它们都有各自的优点和缺点。
下面将分别对这三个框架的优缺点进行详细的分析。
1. Angular:优点:- 完整的解决方案:Angular是一套完整的解决方案,包含了很多有用的功能,如模板语法、依赖注入和路由等。
这使得开发者可以更容易地构建复杂的应用程序。
- 单向数据流:Angular采用了单向数据流的模式,提供了强大的数据绑定和组件化功能,开发者可以很方便地管理和跟踪数据的变化,减少了出现错误的可能性。
- 组件化开发:Angular采用了组件化的开发模式,将应用程序拆分为多个可组合和可重用的组件。
这使得开发更容易组织、测试和维护。
缺点:- 学习曲线较陡峭:Angular的学习曲线相对较陡峭,因为它有自己的一套复杂的概念和术语,需要投入一定的时间和精力去学习和理解。
- 性能问题:由于Angular的复杂性,一些性能问题也被提出来。
特别是在处理大型应用程序时,Angular可能会出现性能问题,需要开发者进行优化。
2. React:优点:- 轻量级和高效:相比于Angular和Vue,React是一个很轻量级的框架,可以更快地加载和渲染页面,同时提供了高效的虚拟DOM技术,使页面的更新更加快速和高效。
- 强大的生态系统:React具有非常丰富和强大的生态系统,有许多优秀的第三方库和插件可以供开发者使用。
同时,React也有完善的文档和社区支持,开发者可以快速获取到需要的资源和帮助。
- 可重用的组件:React采用了组件化的开发模式,组件是React的核心。
开发者可以将组件进行复用,提高开发效率和代码的可维护性。
缺点:- 学习曲线较陡峭:与Angular类似,React也有自己的一套概念和术语,需要学习和掌握。
三种常见服务器的对比目前市场上常见的服务器有三种类型:物理服务器、虚拟私有服务器(VPS)和云服务器。
这三种服务器在性能、可扩展性、成本和管理等方面有着不同的特点。
下面将详细比较这三种服务器的优缺点。
物理服务器是一种硬件设备,它由硬件和操作系统组成。
它是一台独立的服务器,具有卓越的性能和稳定性。
物理服务器的主要优点是可配置性高、性能稳定、对于大规模资源需求的应用程序来说效果最好。
然而,物理服务器的成本高、可扩展性差,并需要相对较长的时间来设置和部署。
虚拟私有服务器(VPS)是在一台物理服务器上分割出多个虚拟服务器的技术。
它提供了更高的资源利用率,可以为用户提供独立的操作系统和应用程序环境,但实际上是共享的硬件和网络资源。
VPS的主要优点是成本相对较低、部署迅速、维护和管理相对简单。
然而,VPS的性能与物理服务器相比稍差,并且仍受到硬件资源的限制。
云服务器是以云计算技术为基础的一种服务器形式。
它将计算、存储和网络资源进行了虚拟化,用户可以按需购买和使用所需资源,并随时进行扩展和缩减。
云服务器的主要优点是灵活性高、可扩展性强、成本相对低廉。
它可以动态地适应应用程序的需求,并且具有自动备份和恢复的特性。
然而,云服务器的性能可能受到其他租户使用资源的影响,而且对于一些涉及大量数据存储的应用程序来说,云服务器可能不是最佳选择。
总结起来,物理服务器适用于对性能和稳定性要求较高的应用程序,但成本相对较高且可扩展性差。
VPS适用于个人用户和小型企业,具有较低的成本和较高的管理简易性。
而云服务器则适用于需要弹性扩展和灵活性的应用程序,但对于一些特定需求的应用程序来说,性能可能会受到其他租户使用资源的影响。
总体来说,选择服务器类型需要根据实际需求和预算来决定。
不同类型的服务器都有各自的优缺点,用户应该根据自己的情况进行权衡和选择。
主流操作系统的特性与优劣比较随着科技的高速发展和信息技术的广泛应用,操作系统成为计算机领域中不可或缺的组成部分。
目前,主流操作系统包括Windows、macOS和Linux。
本文将对这三个操作系统的特性与优劣进行比较。
一、Windows操作系统Windows操作系统是由微软公司开发的一种广泛应用的商业操作系统,具有以下特点:1. 用户友好:Windows提供了直观的用户界面和易于操作的图形化界面,使得用户可以方便地进行各种操作,适合大多数家庭用户和普通办公人员使用。
2. 大量软件支持:由于Windows在个人电脑市场占有率较高,因此可以获得各种各样的软件和应用程序的支持,满足不同用户的需求。
3. 兼容性强:Windows支持各种硬件设备和外部设备的连接,并且支持多种文件格式,使得用户可以轻松进行数据交流和共享。
然而,Windows操作系统也存在一些缺点:1. 安全性不高:由于Windows在全球范围内使用广泛,因此成为了黑客和恶意软件的攻击目标,用户需要时刻保持警惕,定期更新安全补丁来保护系统安全。
2. 稳定性一般:Windows操作系统的稳定性相对较差,长时间运行后可能出现系统崩溃或死机的情况,需要经常重启以维持系统正常运行。
二、macOS操作系统macOS是苹果公司开发的一种基于Unix的操作系统,主要用于苹果电脑和笔记本电脑上。
以下是macOS的主要特点:1. 稳定性高:macOS操作系统基于Unix,具有良好的稳定性和可靠性,长时间运行不易出现系统崩溃的情况。
2. 安全性较好:相对于Windows操作系统,macOS的安全性较高,较少受到病毒和恶意软件的攻击,可以更好地保护用户的个人和敏感信息。
3. 优化的硬件与软件整合:由于苹果公司控制硬件和软件的整个生态系统,macOS与苹果设备的硬件紧密结合,能够实现更好的性能和用户体验。
尽管macOS有许多优势,但也存在一些限制:1. 昂贵的硬件:苹果设备和配件通常比其他品牌的设备价格更高,使得使用macOS系统的成本相对较高。
三种H264开源编码的比较Outline1、三大开源编码器介绍2、实验条件3、实验结果4、实验结论plus:增加t264 high quality mode的实验结果note: 新增内容设置为黄色底纹,以示区别;文中t264表示t264 fast mode,t264表示t264 high quality mode。
一、三大开源编码器介绍1、JMH.264的官方测试源码,由德国hhi研究所负责开发。
特点:实现了264所有的特性,由于是官方的测试源码,所以学术研究的算法都是在JM基础上实现并和JM进行比较。
但其程序结构冗长,只考虑引入各种新特性以提高编码性能,忽视了编码复杂度,其编码复杂度极高,不宜实用。
开发起始时间:2002.22、X264网上自由组织联合开发的兼容264标准码流的编码器,创始人是一个法国人。
X264在网上的口碑极佳。
特点:注重实用。
和JM相比,在不明显降低编码性能的前提下,努力降低编码的计算复杂度,故X264摈弃了264中一些对编码性能贡献微笑但计算复杂度极高的新特性,如多参考帧、帧间预测中不必要的块模式、CABAC等。
开发起始时间:2004.63、T264中国视频编码自由组织联合开发的264编解码器,编码器编码输出标准的264码流,解码器只能解T264编码器生成的码流。
特点:和X264的出发点相似,并吸收了JM、X264、XVID的优点。
开发起始时间:2004.10二、实验条件1、测试序列选用原则:a、不同分辨率qcif和cifb、不同纹理复杂程度c、不同运动剧烈程度选用的测试序列:格式序列名称特点编码帧数Foreman纹理复杂度一般运动剧烈:画面人物和镜头均运动,并涉及到场景切换350Silent背景纹理复杂度极高头肩序列150QcifMiss_am背景纹理不明显头肩序列150Foreman如前述350CifMobile纹理复杂度极高运动形式丰富——画面有多个运动物体,但各运动物体运动方向规则且平缓,镜头也在移动250Mother and daughter背景简单画面人物运动幅度不大150Note: 编码帧数的选取原则:采用的帧数和运动剧烈程度成正比关系,因为对于运动不大剧烈的序列,较少的帧数就可以反映该序列的特点。
主流的四大虚拟化架构对比分析虚拟化技术是一种将物理计算资源划分为多个逻辑资源的技术,它可以提高硬件资源的利用率,降低成本,简化管理。
对于企业来说,选择适合自己需求的虚拟化架构非常重要。
本文将对主流的四大虚拟化架构进行对比分析,包括VMware vSphere、Microsoft Hyper-V、Citrix XenServer和KVM。
首先,我们来看一下VMware vSphere。
vSphere是目前最为流行和被广泛使用的虚拟化平台之一、它提供了丰富的功能和高度稳定性,支持多种操作系统和应用程序。
vSphere有一个成熟的生态系统,有大量的第三方软件和工具可以与之集成,可以满足不同的需求。
此外,vSphere还提供了高级的管理和监控工具,可以帮助管理员更轻松地管理虚拟化环境。
然而,vSphere需要付费许可证,这对一些小型企业来说可能是一个问题。
第二个是Microsoft Hyper-V。
作为微软的虚拟化平台,Hyper-V具有良好的集成性,可以与Windows Server和System Center等微软产品无缝配合。
Hyper-V支持广泛的操作系统和应用程序,并提供了丰富的功能。
与此同时,Hyper-V有一个庞大的用户社区,可以获取到大量的支持和资源。
另外,Hyper-V无需额外的许可证费用,对于使用Windows Server的企业来说,这是一个显著的优势。
然而,与vSphere相比,Hyper-V在一些高级功能和管理工具方面可能稍显不足。
第三个是Citrix XenServer。
XenServer是开源的虚拟化平台,它基于Xen虚拟化技术。
XenServer具有开放性和灵活性,可以与多种操作系统和应用程序兼容。
它提供了一些高级的功能,如高可用性、负载均衡和快速迁移等。
此外,XenServer还可以与Citrix的其他产品集成,如Citrix Workspace和Citrix ADC等,可以为企业提供全面的解决方案。
三大主流开源硬件对比(一)三大主流开源硬件对比:Arduino vs BeagleBone vs Raspberry Pi发表于21小时前| 3025次阅读| 来源CSDN| 14条评论| 作者翟方庆开源硬件ArduinoRaspberry PiBeagleBoneGo Mobile摘要:本文对比了三款比较流行的,也是比较具代表意义的开源硬件平台Arduino Uno、BeagleBone和Raspberry Pi。
从性能以及可扩展性等方面对它们进行对比,帮助开发者了解如何选择适合自己的开源硬件平台。
软硬件整合是今年一再被提及的话题,如今我们也可以看到不少硬件创业的成功案例,比如Jawbone Up、Pebble手表等可穿戴设备,它们可与用户的手机同步,实现软件与硬件的结合。
通过硬件创新与软件整合的概念还有许多。
但是如何将创意变为现实,是一个难题。
许多大公司均选择硬件闭源,从而形成的技术壁垒与专利版权,阻碍着小规模创新者的发展。
而开源硬件,让创业者可以更轻松地将创意转化为现实。
这篇文章由Roger Meike撰写,并在发布于Digital Dinner上。
文中对比了三款最流行的,也是最具代表意义的开源硬件平台Arduino Uno、BeagleBone和Raspberry Pi。
Roger从性能以及可扩展性等方面对它们进行对比,帮助开发者了解如何选择适合自己的开源硬件平台。
以下是译文:从左到右: Arduino Uno, BeagleBone, Raspberry Pi我们喜欢在Digital Dinner制作一些新奇玩意。
这里总是时刻进行着各种项目。
这些天以来,我们大部分的项目都包含了一种电子零件——微控制器。
如果你还没被“创客”(Maker)灵魂附体,我们强烈建议你动起手来试一试,它会让你非常有成就感!如果本身在编程方面有一定基础,那么一些网站、平台和工具可以帮助你获得硬件开发的所需知识,逐步让你可以使用按钮、旋钮和从动系统,做出实际可用的产品。
在了解开源硬件有哪些之前我们先来看下什么是开源硬件?开源硬件,即OpenSource Hardware,是一个指有形的造物:“机器、设备或者其它物理东西的术语——其设计向公众发布,任何人可以制造、修改、分发并使用那些造物。
”开源硬件并不仅仅是硬件设计方法的开放,而更多地是体现了一种创新理念的开放。
这种理念坚信从分享中所获多于自身付出。
当开发者不再受专利授权所困,越来越多地公开分享他们的创新时,他们便能借此获得越来越多的免费帮助,进而改进自己的发明。
开源硬件工具有哪些?ArduinoArduino是最常见的一款开源平台,硬件包含各种型号的Arduino官方板(较常用的型号是Arduino UNO),和驱动各种硬件、传感器的扩展板(Shields),软件开发工具是 Arduino IDE。
硬件方面我们可以看到Arduino实物图,是以ATmega328单片机为核心控制板,包括一些稳压电路,USB转串口电路,晶振,还有LED和下载口,电源口,和拓展IO。
软件方面Arduino提供了专门的程序开发环境Arduino IDE,其界面设计简洁,集成了常用的函数库,用户可以直接调用功能函数,基本的功能模块里面都有,比如舵机控制、PID调速、A/D转换等。
用户可以不必拘泥于基本功能函数的编写,可以把更多的精力投入到功能设计上。
并且Arduino中文社区也非常活跃,用户在上面可以找到参考应用,有问题也可以提出,让其他创客们帮忙解答。
树莓派树莓派由英国树莓派基金会开发,项目发起人是埃本·厄普顿。
其价格适中,兼容性强,接口丰富,并且有巨大的用户基数。
Raspberry Pi4B具备1.5Ghz运行的64位四核处理器,最高支持以60fps速度刷新的4K分辨率的双显示屏,高达4GB RAM(可根据型号选择1GB、2GB、4GB),2.4/5.0Ghz双频无线LAN,蓝牙5.0/BLE,千兆以太网,USB3.0,和PoE功能。
软件有开源,硬件也有?——开源硬件大综述开源硬件(Open Source Hardware)指与自由及开源软件相同方式设计的计算机和电子硬件。
开源硬件也是开源文化的一部分,并且将这一概念延伸到更多样的领域中。
通常开源硬件会公布详细的硬件设计信息(包括机械图、电路图、BOM清单、PCB版图、HDL源码和IC版图)以及与开源软件相关的驱动软件。
1.开源硬件的由来软件通常指源代码和执行文件,而开源软件运动的目的就是开发者开放软件的源代码,使用者可以免费的拷贝、学习和开发利用。
硬件的包括范围更广,可以指产品,也可以指产品的设计信息。
因此硬件开源并不是免费使用,你不可能免费的拷贝硬件。
开源硬件运动的目的是开发者公开硬件的所有设计信息,使得使用者能够学习和进一步开发。
为什么硬件要开源?Richard Stallman 在他的经典文章“Why Software Should be Free”中指出的限制软件拷贝所带来的3个层面的损害:1)越来越少的人使用程序;2)没有人能够改编或者修正程序;3)其他开发者不能够从中学习并运用到新的程序中。
同样的这几个方面在某种程度上对硬件也是同样适用的。
1)硬件开源,其他的制造商能进行二次开发,这在有些时候对于打破垄断是非常好的办法。
比如SUN公司的SPARC开源微处理器。
2)硬件开源这样使用者可能对产品进行维修,而爱好者们可以在此基础上改编出自己喜欢的东西。
如果这样社会和环境资源的节约也是影响很大的。
3)这也是最重要的硬件开源使得其他开发者能够从中学习,加快知识的传播和积累。
2.开源硬件的历史开源硬件的概念是受开源软件的启发而来,但是硬件开放确是可以追溯到很久之前。
随着集成电路的发展硬件的开放也经过了3个时期的发展:1)第一波浪潮出现在60到70年代,出现了大批的无线电爱好者,主要目的就是为了社区交流,传播思想。
而此时中等规模甚至大规模TTL集成电路的出现,使得搭建电路变得简单而且便宜。
无线路由器主流开源系统比较与分析汝金星;葛良全【摘要】由于通信网络的大力发展和应用,追求高性能和良好易用性的路由器系统已成为当前无线传输行业关注的焦点.针对目前国内主流第三方无线开源路由器系统OpenWrt、DD-Wrt、Tomato和M0N0wall进行了研究,以原厂无线路由器固件为测试参照,从系统性能、功能特点、可用性、对象性等方面对四种固件的性能和特点进行了量化的比较和分析.得出第三方无线路由器固件的优势不在于本身性能强弱而在于固件功能强大的结果,并根据分析结果和功能特点指出了各自的适用领域和人群.【期刊名称】《电子世界》【年(卷),期】2016(000)017【总页数】2页(P43,45)【关键词】路由器系统;开源固件;无线传输;MW310R【作者】汝金星;葛良全【作者单位】成都理工大学信息科学与技术学院;成都理工大学信息科学与技术学院【正文语种】中文路由器是互联网最重要的节点设备,处于ISO/OSI模型的网络层。
自Linksys于2003年底推出第一个无线路由器固件的产品WRT54G后,基于Linux操作系统内核的WRT54G使得Cisco公司迫于GNU通用公共许可证和外界共同的压力公布了WRT54G的源代码[1]。
至此以后,用户们根据自己的需求,在原有的固件上面修改和开发新的固件,继而一大批功能丰富、性能独特的路由器第三方固件及众多衍生版本纷纷出现。
此后十多年的快速发展使得无线通信设备走向了一次次的高峰。
目前在众多无线路由器固件中,主流的开源系统主要有四种:DD-WRT、OpenWrt、Tomato和M0N0wall。
2014年初OpenWrt固件项目开始实施,开发的第一个版本是基于buildroot项目的“stable”版。
自此衍生版本的层出不穷使得OpenWrt固件风靡一时[2]。
OpenWrt的高度模块化和高度自动化的特性使其发展稳步向前,OpenWrt固件提供SSH隧道、锐捷认证、网络及流量整形监控[3]、U盘支持等多样化功能。
三大主流开源硬件对比:Arduino vs BeagleBone vs Raspberry Pi发表于2013-05-02 14:07| 71688次阅读| 来源CSDN| 58条评论| 作者翟方庆开源硬件ArduinoRaspberry PiBeagleBoneGo Mobile摘要:本文对比了三款比较流行的,也是比较具代表意义的开源硬件平台Arduino Uno、BeagleBone和Raspberry Pi。
从性能以及可扩展性等方面对它们进行对比,帮助开发者了解如何选择适合自己的开源硬件平台。
软硬件整合是今年一再被提及的话题,如今我们也可以看到不少硬件创业的成功案例,比如Jawbone Up、Pebble手表等可穿戴设备,它们可与用户的手机同步,实现软件与硬件的结合。
通过硬件创新与软件整合的概念还有许多。
但是如何将创意变为现实,是一个难题。
许多大公司均选择硬件闭源,从而形成的技术壁垒与专利版权,阻碍着小规模创新者的发展。
而开源硬件,让创业者可以更轻松地将创意转化为现实。
这篇文章由Roger Meike撰写,并在发布于Digital Dinner上。
文中对比了三款最流行的,也是最具代表意义的开源硬件平台Arduino Uno、BeagleBone和Raspberry Pi。
Roger从性能以及可扩展性等方面对它们进行对比,帮助开发者了解如何选择适合自己的开源硬件平台。
以下是译文:从左到右: Arduino Uno, BeagleBone, Raspberry Pi我们喜欢在Digital Dinner制作一些新奇玩意。
这里总是时刻进行着各种项目。
这些天以来,我们大部分的项目都包含了一种电子零件——微控制器。
如果你还没被“创客”(Maker)灵魂附体,我们强烈建议你动起手来试一试,它会让你非常有成就感!如果本身在编程方面有一定基础,那么一些网站、平台和工具可以帮助你获得硬件开发的所需知识,逐步让你可以使用按钮、旋钮和从动系统,做出实际可用的产品。
软件开发固然乐趣无穷,但如果能将你的创意变为实际产品就更赞了!然而,目前有许多优秀的平台可供创造数字设备,这让我们有些举棋不定。
举例来说,现在我们正在制作一个“水培花园”项目,需要一款控制器来驱动水泵、读取传感器数据。
但是,现在有许多种选择都可以实现这些功能。
而这对于初步接触开源硬件的开发者来说,可能会有些无所适从。
所以我们选择其中三款最流行的开源电子原型平台,加以对比,希望可以便于大家选择,当然,这三款平台都非常值得推荐。
三款开源平台分别是Arduino、BeagleBone和Raspberry Pi。
之所以选择他们,原因在于他们唾手可得,价格实惠,而且大小规格相似(大约2*3寸),更重要的是,他们可以广泛应用于电子产品开发工作中。
在比较前,我们先进行简单的介绍。
Arduino Uno在Maker的圈子里很常见。
Arduino有许多不同尺寸和特性,但是在此我们选择Arduino Uno作为其中的代表。
它是一个非常易于开发的平台,有很多开发者也都选择它作为开发环境,而且它的设计让它易于和其他设备相连。
与Arduino相比,Raspberry Pi是一个比较新的成员。
它实际上是一个嵌入式电脑。
它也是一个并不昂贵的全功能桌面电脑。
它是一个准系统,而作为$35的电脑,它在很多项目中都是一个很好的平台。
BeagleBone可能是三个平台中最鲜为人知的一种,但它有很好的兼容性,许多项目都可使用。
它是一款强大的Linux电脑,而且可以安装到Altoid’s的容器中。
Arduino背面Raspberry Pi背面BeagleBone背面这三款平台各有所长,对于爱好者来说都非常有价值。
下表是三款平台的规格与特色。
首先,Arduino和Raspberry Pi非常便宜,不到40美元,BeagleBone的价值几乎是Arduino Uno的三倍,而Arduino的每秒周转速率大约比另外两款慢40倍,RAM则是其他两款的1/128000。
从中你可以发现他们的差异逐渐产生了,Arduino和Raspberry Pi价格较低,而Rasphberry Pi与BeagleBone功能较强。
从这点来看的话Rasphberry Pi似乎是最好的选择,但事情没有这么简单。
首先它的价格并不如第一眼看到的那么美好,因为运行Raspberry Pi,你需要提供SD卡,而这额外增加了5%到10%的成本。
此外,抛开每秒运转速率的相似性能不谈,在我们的测试中,BeagleBone的运转速度几乎是Raspberry Pi的两倍。
也许有悖常理,对于初学者来说,Arduino也许性能更好。
这是因为Raspberry Pi和BeagleBone都是基于Linux系统。
这个系统让它们可以在小型电脑上,运行多个程序,并支持使用多语言编程。
Arduino的设计非常简单,它一次只能运行一个程序,而且只支持低阶的C++语言编程。
BeagleBone和Raspberry Pi还有一个有意思的特性,就是他们可以在Flash卡上运行(Raspberry Pi使用SD卡,BeagleBone使用microSD)。
这就意味着,你可以通过换存储卡来实现系统移植。
在不同的储存卡上,你可以储存不同的设定值,只要更换储存卡,你就可以继续之前正在开发的项目。
因为这两个板非常的复杂,这意味着你可以通过换卡而轻松的换操作系统。
那么,你如何从中选出一款适合你的平台呢?对于初学者来说,我们推荐Arduino。
它拥有庞大的社区用户、大量的示例项目和教程,并且可以轻松地与其他外部设备连接。
对于初学者来说,学习使用Arduino的方法有许多。
这块板的设计初衷,就是方便与不同的传感器进行交互,而且不需要设计其他电路,所以你不需要太多电路相关的支持,就能轻松上手。
如果还没有尝试过这玩意,不妨试一试(价格并不贵),相信可以得到有趣的经验。
Arduino Uno是一款令人赞赏的工具,除了拥有开源的微控制器,软件开发环境也是免费的。
Raspberry Pi只有信用卡大小,可以直接插入到电视中。
许多传统电脑上的功能,例如文字处理、电子表格和游戏,都可以在Raspberry Pi中运行。
价格低廉,硬件扩展性强,BeagleBone是为喜爱嵌入式Linux系统的玩家量身打造的产品。
BeagleBone还可以当做BeagleBoard或Beagleboard-xM的外接USB或网络扩展模块。
如果开发的产品需要保证尺寸较小,我们推荐Arduino。
这三款平台的尺寸相似,不过Raspberry Pi的SD储存卡会让它看起来更大。
Arduino的款式躲让,但让Arduino区别于其他平台的特性在于,它拥有特别的微处理器,以及一些软件。
它使用Atmel公司的一款微处理器嵌入式系统,体积小,价格实惠。
对于那些需要尺寸非常小巧的项目来说,你可以花费1到2美元购买Atmel的这些芯片,并使用Arduino Bootloader(一个赋予Arduino基本功能的程序),安装后,你就又拥有了一个Arduino。
各种尺寸的ArduinoBeagleBone旁边是它的大哥BeagleBoardBeagleBoard有一个更大,性能更强的版本——BeagleBoard。
如果你需要更强的扩展性,那么BeagleBoard是一个不错的选择。
Arduino Uno、BeagleBone 和Raspberry Pi,后两者都有网络接口如果你的项目需要连接网络,我们比较推荐BeagleBone或Raspberry Pi。
这两款都是真正的Linux电脑。
他们都内建以太网接口和USB,便于用来连接网络。
通过USB接口,你可以连接一个无线模块,那样就可以无需网线就能接入网络。
另外,Linux系统拥有很多内置组件,提供高级的网络特性。
只需将USB WiFi设备连接到BeagleBone或Raspberry Pi上,Linux系统即可支持这些外接设备Arduino支持外设,叫做“shields”,它虽然拥有连接网络的能力,但其网络功能十分有限。
如果花时间去购买扩展,其实与直接购买功能比较完善的高阶电路板一样。
如果你的项目需要接入外部感应设备,我们推荐Arduino和BeagleBone。
Arduino相对于其他设备,更容易连接外部感应器。
不同版本的Arduino使用的电压不同(3.3V 或者5V),这样就可以轻易的连接到不同的外部设备。
而BeagleBone只能连接3.3V的外部设备,并在某些情况下,还需要加入电阻或者其他外部电路才能连接外部设备。
Arduino和BeagleBone都有模拟数字信号接口,这让你轻松的连接输出不同电压的设备。
BeagleBone 拥有更高的模拟数字信号的分辨率,这对于某些项目来说是最好的选择。
就如上面所说的,你必须注意你将要连接的设备,包括小型的感应器,是否拥有叫做I2C或者SPI的数字接口。
这三款平台都支持这些外接设备,所以通信方面不成问题。
对于需要电池供电的项目,我们推荐Arduino。
Arduino功耗是最低地。
如果按照每瓦的性能来比较,BeagleBone的能耗是最高的。
但是Arduino拥有更广泛的空间,因为他可以和很多不同的输入电压的设备一起工作。
这样就要求Arduino需要使用不同型号的电池,并且就算电池没电也能继续运转。
如果需要支持用户界面,我推荐使用Raspberry Pi。
Raspberry Pi独树一帜,因为它拥有一个HDMI输出。
这意味着,你可以接入键鼠和直接接入到你的电视。
在这点看来,你拥有了一台功能全备的电脑,并且拥有用户操作界面。
这样使得Raspberry Pi可以用于在需要与用户交互的项目中,以低成本构建web浏览设备。
事实上,只是出于娱乐性质,我们把Arduino开发工具安装在Raspberry Pi上,并在Raspberry Pi写以一个简单程序并下载到Aruduino上。
它并非是一台高性能的电脑,但是它确实是一台电脑。
总结Arduino是一个扩展性很好的平台,便于与各种设备交互。
对于初学者来说,在进行一些小型项目时,它是绝佳的选择。
Raspberry Pi适合用于需要用户界面和需要网络支持的项目,其性价比较高。
BeagleBone拥有Arduino良好的可扩展性,兼具Raspberry Pi快速处理器和Linux灵活的开发环境。
所以,如果你想做与水培花园类似的项目,我们推荐BeagleBone。
因为它的输入输功能完善,并便于接入网络,所以我们可以通过Web端监测它回传的数据。
所有这3种设备是我们数字化项目的基石。
当然,还有其他平台可用,例如,我们使用Sun SPOTs监测我们的番茄花园,这三种设备已基本能满足我们所需,除非你需要更高级的功能。