跟踪与导航
P400测距和通讯模块既支持跟踪系统,也支持导航系统。P400测距和通讯模块是点对点的精确测距设备。在构建定位和导航同时工作的系统时,常常需要通过另外的无线电系统把位置信息从移动设备发送给控制中心或者把控制中心所知道的移动点的位置信息发送给移动设备,P400测距和通讯模块是一个带有综合数据通信能力的射频系统,因此本征上支持这些跟踪/导航综合系统。
参照和移动节点
典型的跟踪系统包含有“移动”和“参照”设备或者节点。参照节点的(x,y,z)坐标对于定位系统来说是已知的,移动节点相对于参照点的位置是计算出来的。当参照节点处于已知和静态的位置时,他们通常被叫做“锚”。
P400测距和通讯模块本身并不是一个跟踪系统,也不是一个导航系统。但是作为一个点对点集成有无线通讯能力(无线通信是用来协调测距交通和传播的参照点位置数据)的射频测距设备,它为各种不同定位架构的系统提供了最大的灵活性。测距和通讯模块用来测量以下节点之间的距离:
1. 移动点和移动点(用于传播参照或者协调相对行为,例如编队和跟随)
2. 移动点和参照点(用于精确定位或漂移校正)
3. 参照点和参照点 (用于在设置特设“锚”,也就是参照点时达到额外的高精确度)
4. 移动的参照点和移动的目标(用于自动车辆安全和态势感知 )
参照节点处于静止状态时较易理解,实际上任何一个具有准确瞬间动态位置的节点都可以用来作为参考节点。例如,GPS卫星就可以作为参照点,但是他们不是静态的。卫星的位置不断被动态更新并且通过无线方式传送给移动的GPS接收器,GPS接收器根据收到的GPS “锚”之间的位置和延时来进行定位。
同样,在一个由测距和通讯模块RCM辅助的定位系统中,任何具有瞬时精确位置的节点都可以作为一个相对于具有不太精确的已知位置的邻居节点的参照点。这种“传播参照点”技术可以扩展跟踪系统的监控范围,但是以传播位置误差为代价。一般来说,系统需要周期性地通过访问一个知道准确位置的临时静态节点来限制传播误差。
因而在一个采用测距和通讯模块的动态或者特设的跟踪系统中,坐标系统通常建立于
1)临时设置的室外GPS增强锚,
2)一个具有准确全局位置的中央车辆或者,
3)一个由精确测距和无线通信增强的移动GPS定位最优组合决定的系统。
在任何情况下,移动节点的位置都不会比参照点的位置更加精确。
测距精度和几何考量
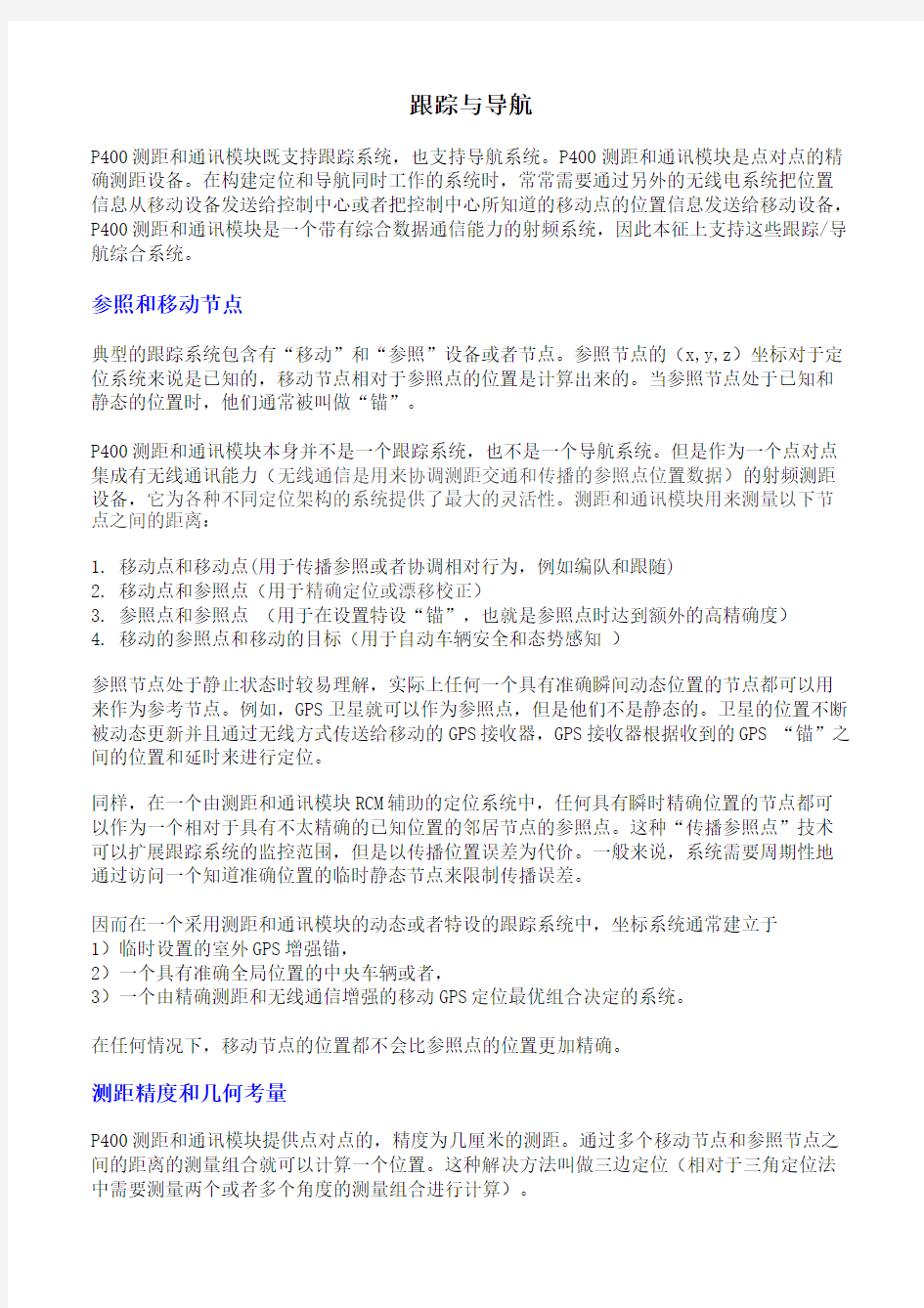
P400测距和通讯模块提供点对点的,精度为几厘米的测距。通过多个移动节点和参照节点之间的距离的测量组合就可以计算一个位置。这种解决方法叫做三边定位(相对于三角定位法中需要测量两个或者多个角度的测量组合进行计算)。
基本的想法就是在一个2D系统中多个圆的交点:
图1:通过移动节点M和参照节点R1,R2和R3之间的距离的组合就可以获得移动节点M的位
置
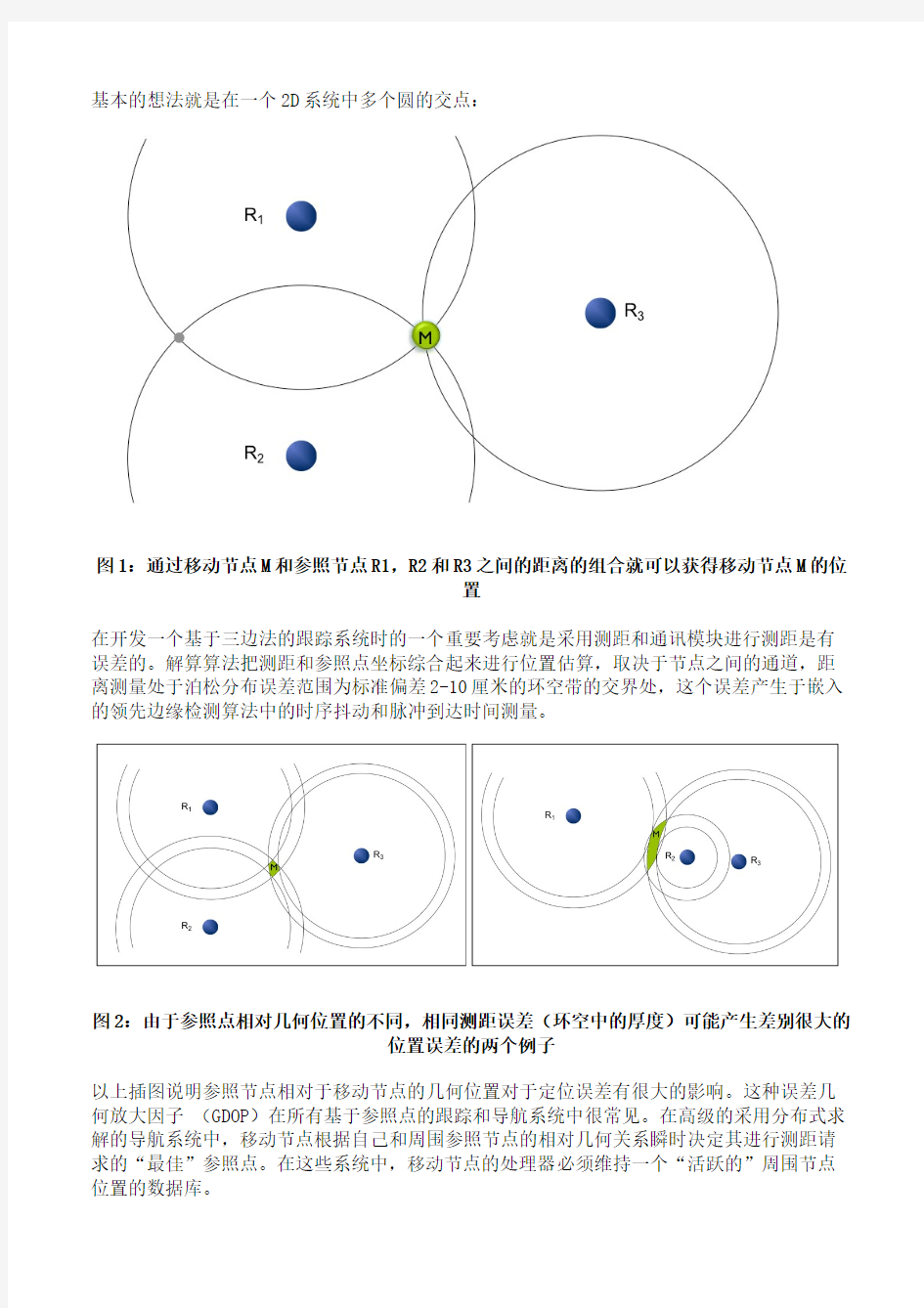
在开发一个基于三边法的跟踪系统时的一个重要考虑就是采用测距和通讯模块进行测距是有误差的。解算算法把测距和参照点坐标综合起来进行位置估算,取决于节点之间的通道,距离测量处于泊松分布误差范围为标准偏差2-10厘米的环空带的交界处,这个误差产生于嵌入的领先边缘检测算法中的时序抖动和脉冲到达时间测量。
图2:由于参照点相对几何位置的不同,相同测距误差(环空中的厚度)可能产生差别很大的
位置误差的两个例子
以上插图说明参照节点相对于移动节点的几何位置对于定位误差有很大的影响。这种误差几何放大因子 (G DO P)在所有基于参照点的跟踪和导航系统中很常见。在高级的采用分布式求解的导航系统中,移动节点根据自己和周围参照节点的相对几何关系瞬时决定其进行测距请求的“最佳”参照点。在这些系统中,移动节点的处理器必须维持一个“活跃的”周围节点位置的数据库。
三种类型的求解算法
规划求解算法既可以驻留在一个单一的基站计算机(集中式架构)中,也可以驻留在每个移
动节点(分布式体系结构)。在任何情况下,规划求解算法都必须考虑到这些圆不会只相交
在一个地方。例如,三个参照距离圆可以相交于6个不同的点(每个参照距离圆有2个交点)。
三种典型的求解方法包括:1)线性最小二乘解算法,2)几何求解法,或3)最优递推估算求解法。
典型的线性最小二乘求解法采用了高斯–牛顿法迭代最大限度地减少了共有移动点坐标和参
照点坐标之间的基于欧氏距离方程的系统误差。这种方法的优势在于可以使用N个参照距离。但是其缺点在于a)迭代算法导致计算时间不同,b)它是非线性的以至于在某些条件下会产
生误差较大的结果,c)需要一个位置种子开始迭代。这个种子位置越接近真实位置,算法会
收敛得越快。通常这个种子是之前的测量解算出的坐标位置。
该算法还需要3个或更多几乎同时测量的到多个参考节点的距离分组,这需要所有被跟踪移
动点具有足够的收敛性和更新速率。
典型的几何求解法找到所有圆的交点,舍弃每两个圆的处于外围的第二个交点,然后把交点
主群集的质心的位置估算为移动节点位置。在下图中,外围第二个交点被画成橙色而主交点
被画成绿色。由主交点(绿色)集群形成的形状的质心包含了解算结果。
图3:几何相交和交点集群
几何求解法的优点是不需要位置种子。这种算法在特定条件下还可以产生所有方法中最精确
的结果。它的缺点在于要求一个通常需要2*N阶运算的集群/关联算法,这里N是参照点的数量。几何求解法常常用于初始化最小二乘解算法或者基于最佳滤波器的系统的种子。
最优递推估算求解法通常由标准卡尔曼滤波器的导出。这种技术把一个简单的目标运动模型
和测距以及参照位置相结合来产生一种根据观察和模型估算把加速度误差和测距误差适当混
合的最优算法。由于欧氏距离公式的非线性性质,扩展卡尔曼滤波器是必要的。在大多数情
案例2 –急救人员(带有扩展范围的集中式架构)
图7:急救人员应用示例
案例3 –分布式传感器(分布式体系结构)
这一尝试的目标是在一个仓库内寻找放射性物质的迹象,并产生这个设施的一个地理定位传感器“热图”。典型的低成本辐射探测器是全方位定向的。当探测器通过仓库时,它的时间标记和地理标记传感器测量数据被记录下来。
在这个展示中,六个UWB无线测距仪作为锚分布在仓库内。移动辐射传感器装备有求解器和一个超宽带UWB无线测距仪。一个单个传感器通过手动移动经过建筑物,但系统可以很容易地扩展到支持多个移动传感器和自动车辆。
当传感器穿过仓库时,辐射指数被读出并且和时间标记与地理标记一同被记录下来。经过后处理的结果显示在图8中。在左边的是一个仓库的蓝图,锚被标记为红色,移动路径被标记
成绿色。在右侧是系统所产生的辐射热图。
图8:使用辐射传感器和超宽带(UWB)无线电测距跟踪系统来产生路径历史的分布式体系结构
图(左)和放射性热图(右)
《光电测量技术》课程读书 报告 院( 系 ) 名 称 : 电气工程及自动化学院 专业名 称 : 自动化测试与控制系 学生学 号: 学生姓 名: 指导教 师 : 哈尔滨工业大学 2016年11月
第1 章绪论. ............................................. 错误! 未定义书签。 1.1 课题背景及研究意义 0 1.2 国内外光电经纬仪技术的研究现状 0 1.3 光电经纬仪测速方法和应用现状 (2) 1.4 报告主要研究内容及结构安排 (2) 1.5 本章小结 (3) 第2 章跟踪测量理论基础. ..................................... 错误! 未定义书签。 2.1 常用坐标系及坐标转换 (4) 2.1.1 地心坐标系 (4) 2.1.2 跑道坐标系 (4) 2.1.3 测量坐标系 (5) 2.1.4 辅助坐标系 (5) 2.2 直角坐标系之间的转换 (5) 2.3 目标空间定位方法 (6)
2.3.1 单站定位 (6) 2.3.2 双站交会定位 (7) 2.3.3 纯测距信息定位 (7) 2.4 本章小结 (7) 第3 章光电跟踪测量. ...................................... 错误! 未定义书签。 3.1 激光测距仪 (9) 3.2 单站双站综合测量 (9) 3.3 本章小结 (10) 参考文献. ................................................ 错误!未定义书签。
第1 章绪论 1.1 课题背景及研究意义 现代化靶场上的武器控制系统、激光通讯设备或者是天文观测仪器中,为了迅速地发现并精确地跟踪目标,都需要安装光电捕获跟踪与瞄准装置。光电经纬仪作为既能记录目标的运动姿态,又能实现对目标高精度空间测量的靶场光电跟踪测量设备,具有测量精度高、事后可复现、直观性强等优点,因此,在靶场跟踪测量领域得到了广泛的应用[1]。 为了精确地跟踪运动目标,一旦确定运动目标之后,需要将目标的运动轨迹以及运动状态记录下来。而运动目标的外弹道测量数据主要包括两方面的内容:第一,运动姿态;第二,弹道数据:如目标在各跟踪测量时刻的空间位置坐标、速度、距离、航迹倾角、航迹偏角等等[2]。得到目标在当前时刻的速度,对于分析目标的空间运动特性、几何特性、物理特性以及后续跟踪测量时刻对目标的识别、运动过程的模拟仿真、航迹测量等具有非常重要的意义[3]。 在靶场试验中,光电经纬仪对运动目标进行跟踪测量时,只能测得目标在各跟踪时刻的方位角和俯仰角,不能直接输出目标的速度测量值。因此,本文主要针对光电经纬仪不能直接测得跟踪目标的速度值这一问题,开展了光电测量仪器的测速误差分析及提高精度方法这一研究。 利用光电经纬仪输出的方位角和俯仰角的角度值,以及加装激光距仪输出的目标距光电经纬仪的距离,采用相应的数学算法获取目标的速度、加速度与测量时间的函数关系,据此外推目标在下一时刻的空间位置坐标、速度和加速度等运动参数[4]。将目标的速度参数反馈给光电经纬仪自身的伺服控制系统,作为目标继续跟踪捕获的参考。这在光电跟踪测量领域中,对提高光电经纬仪的跟踪测量精度具有非常重要的现实意义,也是今后该领域研究的目标和方向。 1.2 国内外光电经纬仪技术的研究现状 光电经纬仪作为现代化靶场最基本的光电测量仪器,被广泛应用于航空航天以及武 器试验等军事科研领域。 从60 年代初期开始,国内的一些研究所和高校开始自己研制靶场试验专用光电经纬仪。其中,最具有代表性的研制单位是长春光机所和成都光电所,这两个研究所研制的靶场专用大型光
跟踪与导航 P400测距和通讯模块既支持跟踪系统,也支持导航系统。P400测距和通讯模块是点对点的精确测距设备。在构建定位和导航同时工作的系统时,常常需要通过另外的无线电系统把位置信息从移动设备发送给控制中心或者把控制中心所知道的移动点的位置信息发送给移动设备,P400测距和通讯模块是一个带有综合数据通信能力的射频系统,因此本征上支持这些跟踪/导航综合系统。 参照和移动节点 典型的跟踪系统包含有“移动”和“参照”设备或者节点。参照节点的(x,y,z)坐标对于定位系统来说是已知的,移动节点相对于参照点的位置是计算出来的。当参照节点处于已知和静态的位置时,他们通常被叫做“锚”。 P400测距和通讯模块本身并不是一个跟踪系统,也不是一个导航系统。但是作为一个点对点集成有无线通讯能力(无线通信是用来协调测距交通和传播的参照点位置数据)的射频测距设备,它为各种不同定位架构的系统提供了最大的灵活性。测距和通讯模块用来测量以下节点之间的距离: 1. 移动点和移动点(用于传播参照或者协调相对行为,例如编队和跟随) 2. 移动点和参照点(用于精确定位或漂移校正) 3. 参照点和参照点 (用于在设置特设“锚”,也就是参照点时达到额外的高精确度) 4. 移动的参照点和移动的目标(用于自动车辆安全和态势感知 ) 参照节点处于静止状态时较易理解,实际上任何一个具有准确瞬间动态位置的节点都可以用来作为参考节点。例如,GPS卫星就可以作为参照点,但是他们不是静态的。卫星的位置不断被动态更新并且通过无线方式传送给移动的GPS接收器,GPS接收器根据收到的GPS “锚”之间的位置和延时来进行定位。 同样,在一个由测距和通讯模块RCM辅助的定位系统中,任何具有瞬时精确位置的节点都可以作为一个相对于具有不太精确的已知位置的邻居节点的参照点。这种“传播参照点”技术可以扩展跟踪系统的监控范围,但是以传播位置误差为代价。一般来说,系统需要周期性地通过访问一个知道准确位置的临时静态节点来限制传播误差。 因而在一个采用测距和通讯模块的动态或者特设的跟踪系统中,坐标系统通常建立于 1)临时设置的室外GPS增强锚, 2)一个具有准确全局位置的中央车辆或者, 3)一个由精确测距和无线通信增强的移动GPS定位最优组合决定的系统。 在任何情况下,移动节点的位置都不会比参照点的位置更加精确。 测距精度和几何考量 P400测距和通讯模块提供点对点的,精度为几厘米的测距。通过多个移动节点和参照节点之间的距离的测量组合就可以计算一个位置。这种解决方法叫做三边定位(相对于三角定位法中需要测量两个或者多个角度的测量组合进行计算)。
地下管线跟踪测量技术服务合同 合同编号: (本合同适用范围包括对埋设于市政道路、郊县公路及规划道路内的电力、信息、给水、排水、燃气以及热力、气体、油料、化工物料等特种管线以及过路构筑物、综合管沟等的跟踪测量技术服务。本合同所指甲方为管线工程建设单位,乙方为具有地下管线测量业务范围的 测绘资质单位。) 甲方(委托方,管线工程建设单位) 乙方(受托方,具有地下管线测量业务范围的测绘资质单位) 根据《中华人民共和国合同法》、《中华人民共和国测绘法》以及其他有关法律法规的规定,遵循平等、自愿、公平和诚实信用的原则,甲、乙双方就地下管线跟踪测量技术服务事项协商一致,签订本合同。 第一条工程概况 工程编号:。 工程名称:。 建设单位:。 施工单位:。
工程执照编号:。 工程所属区县:。 第二条合同标的 1.跟踪测量技术服务范围: 。 2.跟踪测量技术服务内容: (1)管线类别(请在选择项中打“√”) □电力□信息□给水□排水□燃气□特种 □其他:。 (2)管线长度:米,根/孔数:。 第三条跟踪测量技术服务标准 双方约定跟踪测量技术服务的标准按下列第项执行。 1.1:500、l:1000、1:2000地形图图式(GB/T7929) 2.城市地下管线探测技术规程(CJJ61) 3.城市测量规范(CJJ/T8) 4.地下管线测绘规范(DG/TJ08-85) 5.1:500、1:1000、1:2000数字地形测量规范(DG/TJ08-86)6.《XX市地下管线跟踪测量质量监督检查实施办法》 7.其他:。 第四条跟踪测量技术服务期限 跟踪测量技术服务的期限:。 第五条费用核算 测量费用总计人民币(大写)为元(见附件1)。 第六条支付方式
《光电测量技术》课程读书报告 光电经纬仪跟踪测量的基本定位技术 院(系)名称:电气工程及自动化学院 专业名称:自动化测试与控制系 学生学号: 学生姓名: 指导教师: 哈尔滨工业大学 2016年11月
光电经纬仪跟踪测量的基本定位技术 目录 第1章绪论............................................................................................ 错误!未定义书签。 1.1课题背景及研究意义 (1) 1.2国内外光电经纬仪技术的研究现状 (1) 1.3光电经纬仪测速方法和应用现状 (3) 1.4报告主要研究内容及结构安排 (4) 1.5本章小结 (5) 第2章跟踪测量理论基础.................................................................... 错误!未定义书签。 2.1常用坐标系及坐标转换 (6) 2.1.1地心坐标系 (6) 2.1.2跑道坐标系 (7) 2.1.3测量坐标系 (7) 2.1.4辅助坐标系 (8) 2.2直角坐标系之间的转换 (8) 2.3目标空间定位方法 (9) 2.3.1单站定位 (9) 2.3.2双站交会定位 (10) 2.3.3纯测距信息定位 (11) 2.4本章小结 (11) 第3章光电跟踪测量............................................................................ 错误!未定义书签。 3.1激光测距仪 (12) 3.2单站双站综合测量 (13) 3.3本章小结 (14) 参考文献.................................................................................................. 错误!未定义书签。
概述 1.1 激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的大尺寸测量仪器。它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量。SMART310 是Leica 公司在1990年生产的第一台激光跟踪仪,1993年Leica公司又推出了SMART310 的第二代产品,其后,Leica 公司还推出了LT/LTD 系列的激光跟踪仪,以满足不同的工业生产需要。LTD 系列的激光跟踪仪采用了Leica 公司专利的绝对测距仪,测量速度快,精度高,配套的软件则在Leica统一的工业测量系统平台Axyz 下进行开发,包括经纬仪测量模块、全站仪测量模块、激光跟踪仪测量模[8] 。块 和数字摄影测量模块等 激光跟踪系统在我国的应用始于1996 年,上飞、沈飞集团在我国第一次引进了SMART310 激光跟踪系统;2005年上海盾构公司引进了Leica 公司的一套LTD600跟踪测量系统,应用于三维管模的检测。 [52] 激光跟踪测量系统的基本原理 1.2 近年来,激光跟踪测量系统的应用领域在不断扩大,很多公司都相继推出了各自品牌的激光跟踪仪,但所有的激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成的。在本文中,实验采用的是LTD600激光跟踪测量系统(图2.1 ),因此具体讨论的基本原理是基于LTD600 型的激光跟踪测量系统。 图 2.1 LTD600 激光跟踪测量系统系统的组成1.2.1 激光跟踪仪的实质是一台能激光干涉测距和自动跟踪测角测距的全站仪,区别之处在于它没有望远镜,跟踪头的激光束、旋转镜和旋转轴构成了激光跟踪仪的三个轴,三轴相交的中心是测量坐标系的原点。它的结构原理如图2.2 所示系统的硬件主要组成部分包括:传感器头、控制器、电动机和传感器电缆、带LAN 电缆的应用计算机以及反射器。 (1)传感器头:读取角度和距离测量值。激光跟踪器头围绕着两根正交轴旋转。每根轴具有一个编码器用于角度测量和一只直接供电的DC 电动机来进行遥控移动。传感器头的油缸包含了一个测量距离差的单频激光干涉测距仪(IFM ),还有一个绝对距离测量装置(ADM )。激光束通过安装在倾斜轴和旋转轴交叉处的一面镜子直指反射器。激光束也用作为仪器的平行瞄正轴。挨着激光干涉仪的光电探测器(PSD)接收部分反射光束,使跟踪器跟随反射器。 图 2.2 激光跟踪仪结构原理图 (2)控制器: 包含电源、编码器和干涉仪用计数器、电动机放大器、跟踪处理器和网卡(图2.3 )。跟踪处理器将跟踪器内的信号转化成角度和距离观测值,通过局域网卡将数据传送到应用计算机上,同理从计算机中发出的指令也可以通过跟踪处理器进行转换再传送给跟踪器,完成测量操作。
光电经纬仪跟踪测量的基本定位技术
《光电测量技术》课程读书报告 光电经纬仪跟踪测量的基本定位技术 院(系)名称:电气工程及自动化学院 专业名称:自动化测试与控制系 学生学号: 学生姓名: 指导教师: 哈尔滨工业大学 2016年11月
目录 第1章绪论 ................................................................................................ 错误!未定义书签。 1.1课题背景及研究意义 0 1.2国内外光电经纬仪技术的研究现状 0 1.3光电经纬仪测速方法和应用现状 (2) 1.4报告主要研究内容及结构安排 (3) 1.5本章小结 (4) 第2章跟踪测量理论基础 ........................................................................ 错误!未定义书签。 2.1常用坐标系及坐标转换 (5) 2.1.1地心坐标系 (5) 2.1.2跑道坐标系 (6) 2.1.3测量坐标系 (6) 2.1.4辅助坐标系 (7) 2.2直角坐标系之间的转换 (7) 2.3目标空间定位方法 (8) 2.3.1单站定位 (8) 2.3.2双站交会定位 (9) 2.3.3纯测距信息定位 (10) 2.4本章小结 (10) 第3章光电跟踪测量 ................................................................................ 错误!未定义书签。 3.1激光测距仪 (12) 3.2单站双站综合测量 (13) 3.3本章小结 (14) 参考文献..................................................................................................... 错误!未定义书签。
2021上海市地下管线跟踪测量技术服务合同示范文本 Signing a contract can protect the legitimate rights and interests of both parties in accordance with the law and avoid many unnecessary disputes ( 合同范本 ) 甲方:______________________ 乙方:______________________ 日期:_______年_____月_____日 编号:MZ-HT-007149
2021上海市地下管线跟踪测量技术服务合 同示范文本 示范文本 (2012版) 制定 上海市测绘管理办公室 二、本合同适用范围包括对埋设于市政道路、郊县公路及规划道路内的电力、信息、给水、排水、燃气以及热力、气体、油料、化工物料等特种管线以及过路构筑物、综合管沟等的跟踪测量技术服务。 三、本合同所指甲方为管线工程建设单位,乙方为具有地下管线测量业务范围的测绘资质单位。 四、委托代理人在签订本合同时,应出具授权委托书。 五、本合同中凡是当事人约定认为无需填写的条款,应在该填写的
空白处划(/)表示。 六、本合同文本自2012年10月27日起使用。今后在未制定新的版本前,本版本延续使用。 (2012版) 乙方(受托方) _________________________________________________ 工程编号:__________________________________________。 工程名称:__________________________________________。 建设单位:__________________________________________。 施工单位:__________________________________________。 工程执照编号:_________________________________________。 工程所属区县:_________________________________________。1.跟踪测量技术服务范围:___________________________________ __________________________________________________________。 2.跟踪测量技术服务内容:
附件 编号 上海市地下管线跟踪测量技术服务 合同 示范文本 (2012版)
上海市工商行政管理局 制定 上海市测绘管理办公室 使用说明 一、本合同文本是根据《中华人民共和国合同法》、《中华人民共和国测绘法》等有关法律法规制定的示范文本,供当事人约定采用。签订合同前,请仔细阅读。 二、本合同适用范围包括对埋设于市政道路、郊县公路及规划道路内的电力、信息、给水、排水、燃气以及热力、气体、油料、化工物料等特种管线以及过路构筑物、综合管沟等的跟踪测量技术服务。 三、本合同所指甲方为管线工程建设单位,乙方为具有地下管线测量业务范围的测绘资质单位。 四、委托代理人在签订本合同时,应出具授权委托书。 五、本合同中凡是当事人约定认为无需填写的条款,应在该填写的空白处划(/)表示。 六、本合同文本自2012年10月27日起使用。今后在未制定新的版本前,本版本延续使用。
合同编号: 上海市地下管线跟踪测量技术服务合同 (2012版) 甲方(委托方) 乙方(受托方) 根据《中华人民共和国合同法》、《中华人民共和国测绘法》以及其他有关法律法规的规定,遵循平等、自愿、公平和诚实信用的原则,甲、乙双方就地下管线跟踪测量技术服务事项协商一致,签订本合同。 第一条工程概况
工程编号:。工程名称:。建设单位:。施工单位:。工程执照编号:。工程所属区县:。第二条合同标的 1.跟踪测量技术服务范围: 。2.跟踪测量技术服务内容: (1)管线类别(请在选择项中打“√”) □电力□信息□给水□排水□燃气□特种 □其他:。(2)管线长度:米,根/孔数:。 第三条跟踪测量技术服务标准 双方约定跟踪测量技术服务的标准按下列第项执行。1.1:500、l:1000、1:2000地形图图式(GB/T7929) 2.城市地下管线探测技术规程(CJJ61) 3.城市测量规范(CJJ/T8) 4.地下管线测绘规范(DG/TJ08-85) 5.1:500、1:1000、1:2000数字地形测量规范(DG/TJ08-86)6.《上海市地下管线跟踪测量质量监督检查实施办法》 7.其他:。
跟踪测量技术管理制度 为了进一步搞好地质标准化工作,及时、准确地实测各级导线,给定巷道中、腰线,服务好生产队组,根据《煤矿测量规程》及实施细则、《地质防治水安全生产标准化检查标准及评分办法》等有关内容,制定本制度。 一、井下基本控制测量 1.井下基本控制导线按《作业规程》要求及时延长,在延长导线之前,必须对上次所测的最后一个水平角和边长按相应的测量精度进行检查,符合《作业规程》要求后方可接测。 2.井下基本控制点应设置成永久点,设置在碹顶或牢固的岩层上,编号用油漆标记清楚。 3.基本控制导线测量所用仪器、测量要求符合《煤矿测量规程》规定。 4.基本控制导线各项技术指标(相对误差,角度闭合差)应符合《煤矿测量规程》规定。 5.基本控制导线实测完毕应及时进行内业计算,并对测量结果及时归档。 二、施工测量 1.各类施工工程,设计单位应提前送交设计图纸,以便测量人员有时间进行审核、验算、查找资料,准备测量前的工作。 2.变更设计应有设计单位用书面形式通知。
3.测量人员接到设计后,应对设计图纸进行认真审查,验算与测量有关数据,当对设计图纸有疑问时,应及时与设计单位联系进行纠正。 4.准备工作结束后,应及时现场标定施工中、腰线,在标定前必须对起算点、边进行检查,无误后方可进行标定工作。 5.主要巷道中线用经纬仪或全站仪标定,腰线用水准仪、经纬仪或全站仪标定,次要巷道腰线也可用半圆仪标定。 6.新开口的巷道中、腰线应用全站仪,经纬仪标定,掘进到4—8m时,应检查或重新标定中腰线。 7.巷道中腰线应按《作业规程》规定及时延设,开拓巷、回采巷中线的延设每一组不能偏离2′,准备巷不能偏离4′。 8.测量人员标定中腰线后,现场交待清楚队组负责人,随后以书面形式下达到队组,并有负责人签字。 9.每次中腰线的延伸距离一般不超过50m,根据巷道掘进需要应及时用仪器校准延伸导线和激光指向仪。在延伸中腰线点时,必须对所使用的和新敷设的中腰线点进行检查,检查无误后方可延伸。 10.使用激光指向仪指示巷道掘进方向时,测量人员应做到: 10.1激光指向仪在下井前必须对其进行全面检查,确保其安全性能和技术指标符合要求,保证其下井后能够正常工作。 10.2激光指向仪的设置位置和光速方向,应根据仪器标定的中、腰线点确定,所用的中、腰线点一般不少于三个,点间距离以大于30m为宜。
STANDARD CONTRACT SAMPLE (合同范本) 甲方:____________________ 乙方:____________________ 签订日期:____________________ 编号:YB-HT-009494 上海市地下管线跟踪测量技
上海市地下管线跟踪测量技术服务合同示范文本(2020版) 示范文本 (2012版) 制定 上海市测绘管理办公室 二、本合同适用范围包括对埋设于市政道路、郊县公路及规划道路内的电力、信息、给水、排水、燃气以及热力、气体、油料、化工物料等特种管线以及过路构筑物、综合管沟等的跟踪测量技术服务。 三、本合同所指甲方为管线工程建设单位,乙方为具有地下管线测量业务范围的测绘资质单位。 四、委托代理人在签订本合同时,应出具授权委托书。 五、本合同中凡是当事人约定认为无需填写的条款,应在该填写的空白处划(/)表示。 六、本合同文本自2012年10月27日起使用。今后在未制定新的版本前,本版本延续使用。 (2012版)
乙方(受托方)_________________________________________________ 工程编号:__________________________________________。 工程名称:__________________________________________。 建设单位:__________________________________________。 施工单位:__________________________________________。 工程执照编号:_________________________________________。 工程所属区县:_________________________________________。 1.跟踪测量技术服务范围:___________________________________ __________________________________________________________。2.跟踪测量技术服务内容: (1)管线类别(请在选择项中打“√”) □电力□信息□给水□排水□燃气□特种 □其他:______________________________________________。 (2)管线长度:______米,根/孔数:______。 双方约定跟踪测量技术服务的标准按下列第____项执行。 1.1:500、l:1000、1:2000地形图图式(GB/T7929) 2.城市地下管线探测技术规程(CJJ61) 3.城市测量规范(CJJ/T8) 4.地下管线测绘规范(DG/TJ08-85) 5.1:500、1:1000、1:2000数字地形测量规范(DG/TJ08-86) 6.《上海市地下管线跟踪测量质量监督检查实施办法》 7.其他:_______________________________________________。
合同编号: 上海市地下管线跟踪测量技术服务合同 甲方(委托方): 乙方(受托方): 根据《中华人民共和国合同法》、《中华人民共和国测绘法》以及其他有关法律法规的规定,遵循平等、自愿、公平和诚实信用的原则,甲、乙双方就地下管线跟踪测量技术服务事项协商一致,签订本合同。 第一条工程概况 工程编号:。 工程名称:。 建设单位:。 施工单位:。 工程执照编号:。 工程所属区县:。 第二条合同标的 1. 跟踪测量技术服务范围:。 2. 跟踪测量技术服务内容: (1)管线类别(请在选择项中打“√”) □ 电力□ 信息□ 给水□ 排水□ 燃气□ 特种 □ 其他:。 (2)管线长度:米,根/孔数:。
第三条跟踪测量技术服务标准 双方约定跟踪测量技术服务的标准按下列第项执行。 1. 1:500、l:1000、1:2000地形图图式(GB/T7929) 2. 城市地下管线探测技术规程(CJJ61) 3. 城市测量规范(CJJ/T8) 4. 地下管线测绘规范(DG/TJ08-85) 5. 1:500、1:1000、1:2000数字地形测量规范(DG/TJ08-86) 6. 《上海市地下管线跟踪测量质量监督检查实施办法》 7. 其他:。 第四条跟踪测量技术服务期限 跟踪测量技术服务的期限:。 第五条费用核算 测量费用总计人民币(大写)为元(见附件1)。 第六条支付方式 1. 自本合同签订之日起工作日内,甲方向乙方预付本合同总费用的 %。 2. 剩余费用按以下第种方式支付。 (1)一次性支付。 (2)分期支付(请在选择项中打“√” ): □ 乙方将测量报告送检之日起工作日内,甲方支付合同费用的%。