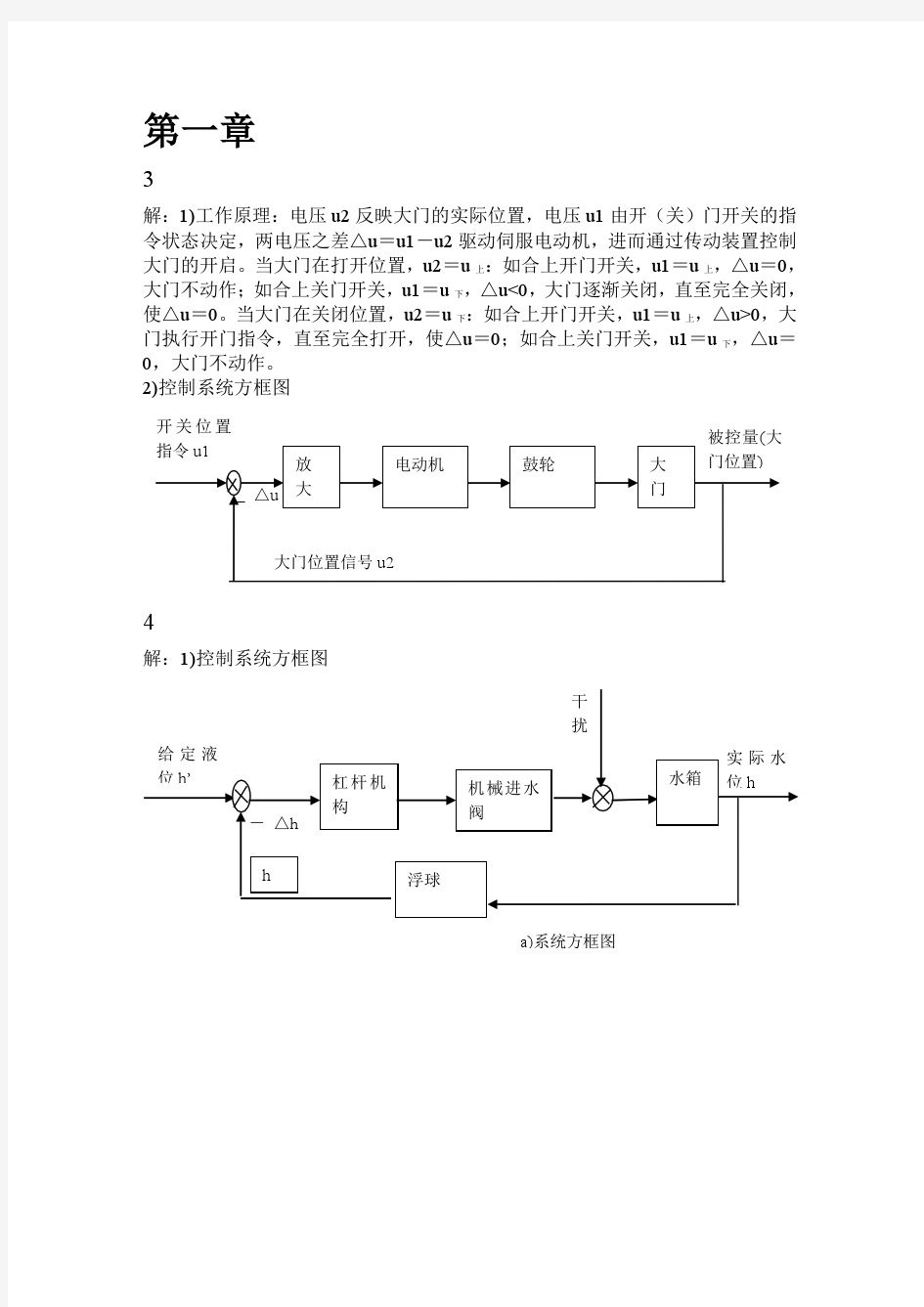
《工程力学》复习资料 1.画出(各部分)的受力图 (1)(2) (3) 2.力F作用在边长为L正立方体的对角线上。设Oxy平面与立方体的底面ABCD 相平行,两者之间的距离为h,试求力F对O点的矩的矢量表达式。
解:依题意可得: cos cos F F x sin cos F F y sin F F z 其中3 3sin 3 6cos 45 点坐标为: h l l ,,则 3 ) ()(33 33 33 3j i h l F k F j F i F F M 3.如图所示力系由 F 1,F 2,F 3,F 4和F 5组成,其作 用线分别沿六面体棱边。已知:的F 1=F 3=F 4=F 5=5kN, F 2=10 kN ,OA=OC/2=1.2m 。试求力 系的简化结果。 解:各力向O 点简化 0.0.0 .523143C O F A O F M C B F A O F M C O F C O F M Z Y X 即主矩的三个分量 kN F F Rx 55 kN F F Ry 102kN F F F F RZ 54 3 1 即主矢量为: k j i 5105合力的作用线方程 Z y X 24.多跨梁如图所示。已知:q=5kN ,L=2m 。试求A 、B 、D 处的约束力。
取CD 段0 ci M 0 212 ql l F D 解得 kN F D 5取整体来研究,0iy F 0 2D B Ay F l q F F 0ix F 0 Ax F 0 iA M 0 32l F l ql l F D B 联合以上各式,解得 kN F F Ay A 10kN F B 255.多跨梁如图所示。已知:q=5kN ,L=2m ,ψ=30°。试求A 、C 处的约束力。(5+5=10分) 取BC 段0iy F 0 cos 2C B F l q F 0ix F 0 sin C Bx F F 0 ic M 0 22l l q l F By
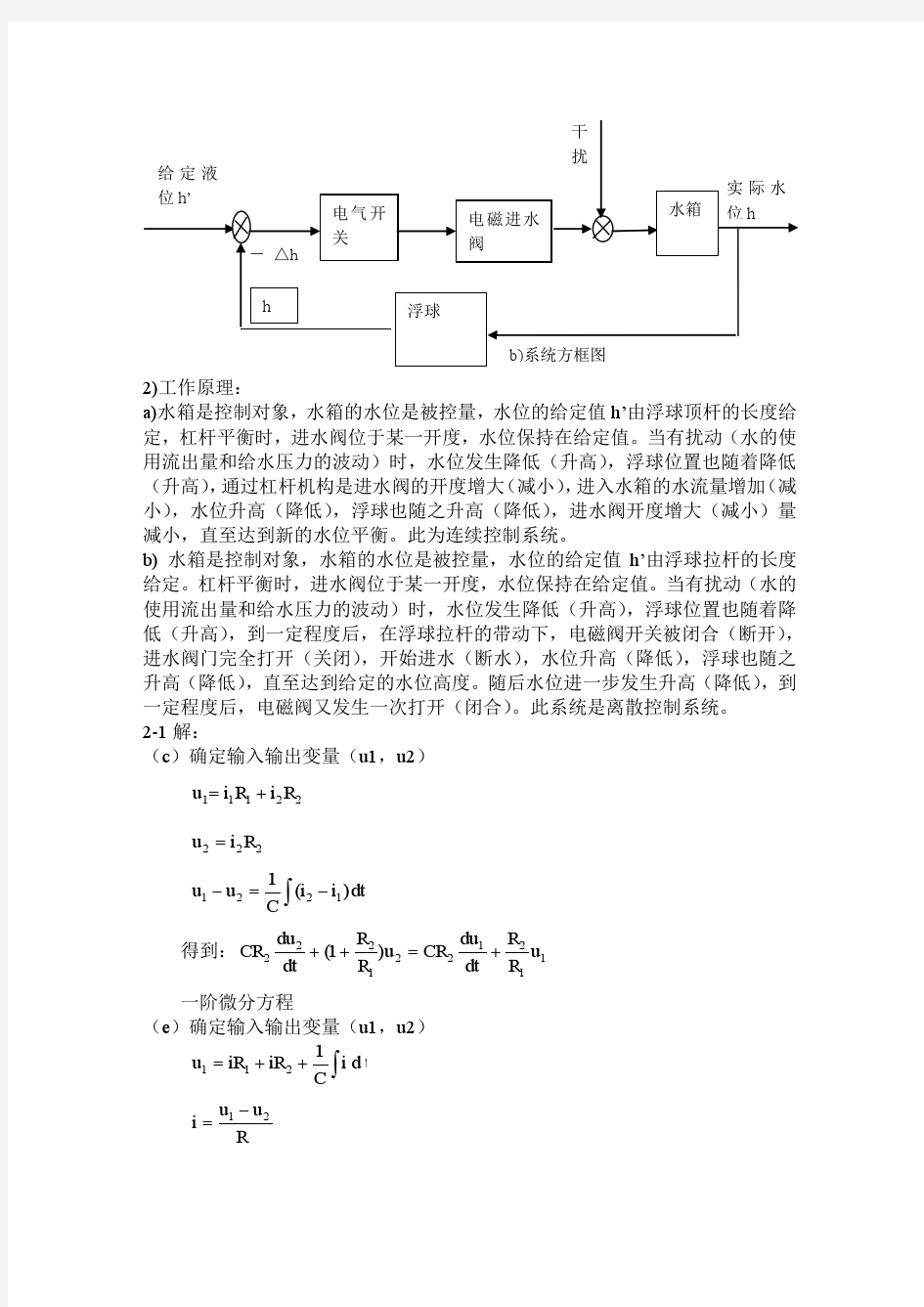
第一章 随机过程的基本概念 1.设随机过程 +∞<<-∞=t t X t X ,cos )(0ω,其中0ω是正常数,而X 是标准正态变量。试求X (t )的一维概率分布 解:∵ 当0cos 0=t ω 即 πω)2 1 (0+ =k t 即 πω)21(10+=k t 时 {}10)(==t x p 若 0cos 0≠t ω 即 πω)2 1 (1 0+≠ k t 时 {}{}x t X P x x X P t x F ≤=≤=0cos )(),(ω 当 0cos 0>t ω时 ξπ ωωξd e t x X P t x F t x ? - = ??? ? ??≤=02 cos 0 2 021cos ),( 此时 ()t e x t x F t x f t x 0cos 2cos 1 21,),(022ωπ ω? =??=- 若 0cos 0 ?? ?= ,2 ,cos )(出现反面出现正面t t t X π 假定“出现正面”和“出现反面”的概率各为21。试确定)(t X 的一维分布函数)2 1 ,(x F 和)1,(x F ,以及二维分布函数)1,2 1;,(21x x F 解:(1)先求)21,(x F 显然???=?? ???-=??? ??出现反面出现正面 出现反面出现正面10,212,2cos 21π X 随机变量?? ? ??21X 的可能取值只有0,1两种可能,于是 21 021= ??????=?? ? ??X P 2 1121=??????=??? ??X P 所以 ?????≥<≤<=??? ?? 11102 1 0021,x x x x F 再求F (x ,1) 显然? ??-=???=出现反面出现正面出现反面出现正面 2 1 2 cos (1)πX {}{}2 1 2)1(-1 (1)====X p X p 所以 ???? ???≥<≤<=2 121- 2 1-1 0,1)(x x x x F (2) 计算)1,2 1 ;,(21x x F ???-=???=出现反面出现正面出现反面出现正面 2 1)1(, 1 0)2 1 ( X X 于是 工程力学课后习题答案解析 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII 《工程力学》复习资料1.画出(各部分)的受力图 (1)(2) (3) 2.力F作用在边长为L正立方体的对角线上。设 Oxy平面与立方体的底面ABCD相平行,两者之间的距离 为h,试求力F对O点的矩的矢量表达式。 解:依题意可得:?θcos cos ??=F F x ?θsin cos ??=F F y θsin ?=F F z 其中33sin =θ 36cos =θ 45=? 点坐标为:()h l l ,, 则()3 )()(3333333j i h l F k F j F i F F M +?+=-+-= 3.如图所示力系由F 1,F 2,F 3,F 4和F 5组成,其作用线分别沿六面体棱边。已知:的F 1=F 3=F 4=F 5=5kN, F 2=10 kN ,OA=OC/2=。试求力系的简化结果。 解:各力向O 点简化 0 .0.0.523143=-==-==+-=C O F A O F M C B F A O F M C O F C O F M Z Y X 即主矩的三个分量 kN F F Rx 55== kN F F Ry 102== kN F F F F RZ 5431=+-= 即主矢量为: k j i 5105++ 合力的作用线方程 Z y X == 2 4.多跨梁如图所示。已知:q=5kN ,L=2m 。试求A 、B 、D 处的约束力。 取CD 段 0=∑ci M 02 12=-?ql l F D 解得 kN F D 5= 取整体来研究, 第一章 1.设计现代OS的主要目标是什么? 答:(1)有效性(2)方便性(3)可扩充性(4)开放性 4.试说明推劢多道批处理系统形成和収展的主要劢力是什么? 答:主要动力来源于四个方面的社会需求与技术发展: (1)不断提高计算机资源的利用率; (2)方便用户; (3)器件的不断更新换代; (4)计算机体系结构的不断发展。 12.试从交互性、及时性以及可靠性方面,将分时系统不实时系统迚行比较。答:(1)及时性:实时信息处理系统对实时性的要求与分时系统类似,都是以人所能接受的等待时间来确定;而实时控制系统的及时性,是以控制对象所要求的开始截止时间或完成截止时间来确定的,一般为秒级到毫秒级,甚至有的要低于100微妙。 (2)交互性:实时信息处理系统具有交互性,但人与系统的交互仅限于访问系统中某些特定的专用服务程序。不像分时系统那样能向终端用户提供数据和资源共享等服务。 (3)可靠性:分时系统也要求系统可靠,但相比之下,实时系统则要求系统具有高度的可靠性。因为任何差错都可能带来巨大的经济损失,甚至是灾难性后果,所以在实时系统中,往往都采取了多级容错措施保障系统的安全性及数据的安全性。 13.OS有哪几大特征?其最基本的特征是什么? 答:并发性、共享性、虚拟性和异步性四个基本特征;最基本的特征是并发性。 第二章 2. 画出下面四条诧句的前趋图: S1=a:=x+y; S2=b:=z+1; S3=c:=a –b;S4=w:=c+1; 8.试说明迚程在三个基本状态之间转换的典型原因。 答:(1)就绪状态→执行状态:进程分配到CPU资源 (2)执行状态→就绪状态:时间片用完 (3)执行状态→阻塞状态:I/O请求 (4)阻塞状态→就绪状态:I/O完成 4-1 试求题4-1图所示各梁支座的约束力。设力的单位为kN ,力偶矩的单位为kN ?m ,长度单位为m ,分布载荷集度为kN/m 。(提示:计算非均布载荷的投影和与力矩和时需应用积分)。 解: (b):(1) 整体受力分析,画出受力图(平面任意力系); (2) 选坐标系Axy ,列出平衡方程; 0: 0.40 0.4 kN x Ax Ax F F F =-+==∑ ()0: 20.80.5 1.60.40.720 0.26 kN A B B M F F F =-?+?+?+?==∑ 0: 20.50 1.24 kN y Ay B Ay F F F F =-++==∑ 约束力的方向如图所示。 (c):(1) 研究AB 杆,受力分析,画出受力图(平面任意力系); (2) 选坐标系Axy ,列出平衡方程; 2 ()0: 3320 0.33 kN B Ay Ay M F F dx x F =-?-+??==∑? A B C D 0.8 0.8 0.4 0.5 0.4 0.7 2 (b) A B C 1 2 q =2 (c) M=3 30o A B C D 0.8 0.8 0.8 20 0.8 M =8 q =20 (e) A B C 1 2 q =2 M=3 30o F B F Ax F A y y x dx 2?dx x A B C D 0.8 0.8 0.4 0.5 0.4 0.7 2 F B F Ax F A y y x 2 0: 2cos300 4.24 kN o y Ay B B F F dx F F =-?+==∑? 0: sin300 2.12 kN o x Ax B Ax F F F F =-==∑ 约束力的方向如图所示。 (e):(1) 研究CABD 杆,受力分析,画出受力图(平面任意力系); (2) 选坐标系Axy ,列出平衡方程; 0: 0 x Ax F F ==∑ 0.8 ()0: 208 1.620 2.40 21 kN A B B M F dx x F F =??++?-?==∑? 0.8 0: 20200 15 kN y Ay B Ay F dx F F F =-?++-==∑? 约束力的方向如图所示。 4-16 由AC 和CD 构成的复合梁通过铰链C 连接,它的支承和受力如题4-16图所示。已知均布载荷集度q=10 kN/m ,力偶M=40 kN ?m ,a=2 m ,不计梁重,试求支座A 、B 、D 的约束力和铰链C 所受的力。 解:(1) 研究CD 杆,受力分析,画出受力图(平面平行力系); (2) 选坐标系Cxy ,列出平衡方程; 0()0: -20 5 kN a C D D M F q dx x M F a F =??+-?==∑? 0: 0 25 kN a y C D C F F q dx F F =-?-==∑? (3) 研究ABC 杆,受力分析,画出受力图(平面平行力系); A B C D 0.8 0.8 0.8 20 0.8 M =8 q =20 F B F Ax F A y y x 20?dx x dx A B C D a M q a a a C D M q a a F C F D x dx qdx y x y x A B C a q a F ’C F A F B x dx qdx 随机过程习题解答(一) 第一讲作业: 1、设随机向量的两个分量相互独立,且均服从标准正态分布。 (a)分别写出随机变量和的分布密度 (b)试问:与是否独立?说明理由。 解:(a) (b)由于: 因此是服从正态分布的二维随机向量,其协方差矩阵为: 因此与独立。 2、设和为独立的随机变量,期望和方差分别为和。 (a)试求和的相关系数; (b)与能否不相关?能否有严格线性函数关系?若能,试分别写出条件。 解:(a)利用的独立性,由计算有: (b)当的时候,和线性相关,即 3、设是一个实的均值为零,二阶矩存在的随机过程,其相关函数为 ,且是一个周期为T的函数,即,试求方差 函数。 解:由定义,有: 4、考察两个谐波随机信号和,其中: 式中和为正的常数;是内均匀分布的随机变量,是标准正态分布的随机变量。 (a)求的均值、方差和相关函数; (b)若与独立,求与Y的互相关函数。 解:(a) (b) 第二讲作业: P33/2.解: 其中为整数,为脉宽 从而有一维分布密度: P33/3.解:由周期性及三角关系,有: 反函数,因此有一维分布: P35/4. 解:(1) 其中 由题意可知,的联合概率密度为: 利用变换:,及雅克比行列式: 我们有的联合分布密度为: 因此有: 且V和相互独立独立。 (2)典型样本函数是一条正弦曲线。 (3)给定一时刻,由于独立、服从正态分布,因此也服从正态分布,且 所以。 (4)由于: 所以因此 当时, 当时, 由(1)中的结论,有: P36/7.证明: (1) (2) 由协方差函数的定义,有: P37/10. 解:(1) 当i =j 时;否则 令 ,则有 第三讲作业: P111/7.解: (1)是齐次马氏链。经过次交换后,甲袋中白球数仅仅与次交换后的状态有关,和之前的状态和交换次数无关。 (2)由题意,我们有一步转移矩阵: P111/8.解:(1)由马氏链的马氏性,我们有: (2)由齐次马氏链的性质,有: (2) 第一章 静力学基本概念与物体的受力分析 下列习题中,未画出重力的各物体的自重不计,所有接触面均为光滑接触。 1.1 试画出下列各物体(不包括销钉与支座)的受力图。 解:如图 (g) (j) P (a) (e) (f) W W F F A B F D F B F A F A T F B A 1.2画出下列各物体系统中各物体(不包括销钉与支座)以及物体系统整体受力图。 解:如图 F B B (b) (c) C (d) C F D (e) A F D (f) F D (g) (h) EO B O E F O (i) (j) B Y F B X B F X E (k) 1.3铰链支架由两根杆AB、CD和滑轮、绳索等组成,如题1.3图所示。在定滑轮上吊有重为W的物体H。试分别画出定滑轮、杆CD、杆AB和整个支架的受力图。 解:如图 ' D 1.4题1.4图示齿轮传动系统,O1为主动轮,旋转 方向如图所示。试分别画出两齿轮的受力图。 解: 1 o x F 2o x F 2o y F o y F F F' 1.5结构如题1.5图所示,试画出各个部分的受力图。 解: 第二章 汇交力系 2.1 在刚体的A 点作用有四个平面汇交力。其中F 1=2kN ,F 2=3kN ,F 3=lkN , F 4=2.5kN ,方向如题2.1图所示。用解析法求该力系的合成结果。 解 0 00 1 42 3c o s 30c o s 45c o s 60 c o s 45 1.29 Rx F X F F F F KN = =+- -=∑ 00001423sin30cos45sin60cos45 2.54Ry F Y F F F F KN ==-+-=∑ 2.85R F KN == 0(,)tan 63.07Ry R Rx F F X arc F ∠== 2.2 题2.2图所示固定环受三条绳的作用,已知F 1=1kN ,F 2=2kN ,F 3=l.5kN 。求该力系的合成结果。 解:2.2图示可简化为如右图所示 23cos60 2.75Rx F X F F KN ==+=∑ 013sin600.3Ry F Y F F KN ==-=-∑ 2.77R F KN == 0(,)tan 6.2Ry R Rx F F X arc F ∠==- 2.3 力系如题2.3图所示。已知:F 1=100N ,F 2=50N ,F 3=50N ,求力系的合力。 解:2.3图示可简化为如右图所示 080 arctan 5360 BAC θ∠=== 32cos 80Rx F X F F KN θ==-=∑ 12sin 140Ry F Y F F KN θ==+=∑ 161.25R F KN == ( ,)tan 60.25Ry R Rx F F X arc F ∠= = 2.4 球重为W =100N ,悬挂于绳上,并与光滑墙相接触,如题2.4 图所示。已知30α=, 4日1-1试画出以下各题中圆柱或圆盘的受力图。与其它物体接触处的摩擦力均略去。 ,F2=535 解:(1) 研究AB (2) 相似关系: 几何尺寸: 求出约束反力: 2-6 如图所示结构由两弯杆ABC和DE构成。构件重量不计,图中的长度单位为cm。已知F=200 N,试求支座A和E的约束力。 解:(1) 取DE为研究对象, (2) 取ABC F A 3-1 已知梁AB 上作用一力偶,力偶矩为M ,梁长为l ,梁重不计。求在图a ,b ,c 三种情况下,支座A 和 B 的约束力 解:(a) (b) (c) 3-3 ,M 2 =125 Nm 。求 解:(1) (2) 列平衡方程: 3-5 BC 上的力偶的力偶矩大小为M 2=,试 求作用在OA 解:(1) 研究 BC 列平衡方程: (2) 研究AB 可知: (3) 研究OA 杆,受力分析,画受力图: 列平衡方程: A B F A F 4-1 试求题4-1图所示各梁支座的约束力。设力的单位为kN ,力偶矩的单位为kNm ,长度单位为m ,分布 载荷集度为kN/m 。(提示:计算非均布载荷的投影和与力矩和时需应用积分)。 解: (b):(1) (2) 选坐标系Axy (c):(1) 研究AB (2) 选坐标系Axy (e):(1) 研究C ABD (2) 选坐标系Axy 4-13 Q ,重心在A 点,彼此用 铰链A 和绳子DE 、C 两点的约束力。 解:(1)(2) 选坐标系Bxy (3) 研究AB (4) 选A 4-16 由AC 和CD q =10 kN/m ,力偶M C 所受的力。 解:(1) 研究CD (2) 选坐标系Cxy (3) 研究ABC (4) 选坐标系Bxy 4-17 刚架ABC 和刚架CD 4-17图所示,载荷 kN/m)。 解: (a):(1) =50 F F 第一章 1 .设计现代OS 的主要目标是什么? 答:(1)有效性(2)方便性(3)可扩充性(4)开放性 2 .OS 的作用可表现在哪几个方面? 答:(1)OS作为用户与计算机硬件系统之间的接口 (2)OS 作为计算机系统资源的管理者 (3)OS 实现了对计算机资源的抽象 4 .试说明推动多道批处理系统形成和发展的主要动力是什么?答:主要动力来源于四个方面的社会需求与技术发展: (1)不断提高计算机资源的利用率; (2)方便用户; (3)器件的不断更新换代; (4)计算机体系结构的不断发展。 7 .实现分时系统的关键问题是什么?应如何解决?答:关键问题是当用户在自己的终端上键入命令时,系统应能及时接收并及时处理该命令,在用户能接受的时延内将结果返回给用户。 解决方法:针对及时接收问题,可以在系统中设置多路卡,使主机能同时接收用户从各个终端上输入的数据;为每个终端配置缓冲区,暂存用户键入的命令或数据。针对及时处理问题,应使所有的用户作业都直接进入内存,并且为每个作业分配一个时间片,允许作业只在自己的时间片内运行,这样在不长的时间内,能使每个作业都运行一次。 12 .试从交互性、及时性以及可靠性方面,将分时系统与实时系统进行比较。 答:( 1 )及时性:实时信息处理系统对实时性的要求与分时系统类似,都是以人所能接受的等待时间来确定;而实时控制系统的及时性,是以控制对象所要求的开始截止时间或完成截止时间来确定的,一般为秒级到毫秒级,甚至有的要低于100 微妙。 (2)交互性:实时信息处理系统具有交互性,但人与系统的交互仅限于访问系统中某些特定的专用服务程序。不像分时系统那样能向终端用户提供数据和资源共享等服务。 (3)可靠性:分时系统也要求系统可靠,但相比之下,实时系统则要求系统具有高度 的可靠性。因为任何差错都可能带来巨大的经济损失,甚至是灾难性后果,所以在实时系统中,往往都采取了多级容错措施保障系统的安全性及数据的安全性。 13 .OS 有哪几大特征?其最基本的特征是什么?答:并发性、共享性、虚拟性和异步性四个基本特征;最基本的特征是并发性。 工程力学-课后习题答案 4-1 试求题4-1图所示各梁支座的约束力。设力 的单位为kN ,力偶矩的单位为kN m ,长度 单位为m ,分布载荷集度为kN/m 。(提示: 计算非均布载荷的投影和与力矩和时需应用积分)。 A B C D 0.8 0.8 0.4 0 00.7 2 ( A B C 1 2 q ( M= 30o A B C D 0.8 0.8 0.8 2 0.8 M = q =( 解: (b):(1) 整体受力分析,画出受力图(平面任意 力系); (2) 选坐标系Axy ,列出平衡方程; 0: 0.40 0.4 kN x Ax Ax F F F =-+==∑ ()0: 20.80.5 1.60.40.720 0.26 kN A B B M F F F =-?+?+?+?==∑ 0: 20.50 1.24 kN y Ay B Ay F F F F =-++==∑ 约束力的方向如图所示。 (c):(1) 研究AB 杆,受力分析,画出受力图(平 面任意力系); A B C 1 2 q M= 30o F F A F A y x d 2?x A B C D 0.8 0.8 0.4 00 0.7 2 F F A F A y (2) 选坐标系Axy ,列出平衡方程; 2 0()0: 3320 0.33 kN B Ay Ay M F F dx x F =-?-+??==∑? 2 0: 2cos300 4.24 kN o y Ay B B F F dx F F =-?+==∑? 0: sin 300 2.12 kN o x Ax B Ax F F F F =-==∑ 约束力的方向如图所示。 (e):(1) 研究C ABD 杆,受力分析,画出受力图 (平面任意力系); (2) 选坐标系Axy ,列出平衡方程; 0: 0x Ax F F ==∑ 0.8 ()0: 208 1.620 2.40 21 kN A B B M F dx x F F =??++?-?==∑? 0.8 0: 20200 15 kN y Ay B Ay F dx F F F =-?++-==∑? 约束力的方向如图所示。 A B C D 0.8 0.8 0.8 20.8 M = q =F F A F A y x 20 x d 随机过程复习题 一、填空题: 1.对于随机变量序列}{n X 和常数a ,若对于任意0>ε,有 ______}|{|lim =<-∞ >-εa X P n n ,则称}{n X 依概率收敛于a 。 2.设}),({0≥t t X 是泊松过程,且对于任意012≥>t t , ,则 15 92}6)5(,4)3(,2)1({-??= ===e X X X P , 618}4)3(|6)5({-===e X X P 15 32 62 32 92! 23!2)23(!23}2)3()5({}2)1()3({}2)0()1({} 2)3()5(,2)1()3(,2)0()1({} 6)5(,4)3(,2)1({----??=???==-=-=-==-=-=-====e e e e X X P X X P X X P X X X X X X P X X X P 66 218! 26}2)3()5({}4)3(|6)5({--===-===e e X X P X X P 3.已知马尔可夫链的状态空间为},,{321=I ,初始分布为),,(4 1 2141, ?????? ?? ????????? ?=434 103 13131043 411)(P ,则167)2(12=P ,161}2,2,1{210====X X X P ???????? ?????? ????=48 31481348 436133616367 164167165)1()2(2P P 16 7 )2(12=P 16 1 314341}2|2{}1|2{}1{}2,1|2{}1|2{}1{} 2,2,1{12010102010210=??=================X X P X X P X P X X X P X X P X P X X X P 4.强度λ的泊松过程的协方差函数),min(),(t s t s C λ= 5.已知平稳过程)(t X 的自相关函数为πττcos )(=X R , )]()([)(π?δπ?δπω-++=X S 6. 对于平稳过程)(t X ,若)()()(ττX R t X t X >=+<,以概率1成立,则称)(t X 的自相关函数具有各态历经性。 7.已知平稳过程)(t X 的谱密度为2 3)(2 42 ++=ωωωωS ,则)(t X 的均方值= 2 121- 222 2221 1221)2(22211122)(+??-+??=+-+= ωωωωωS ττ τ-- -=e e R X 2 12 1)(2 第3章处理机调度1)选择题 (1)在分时操作系统中,进程调度经常采用_D_ 算法。 A. 先来先服务 B. 最高优先权 C. 随机 D. 时间片轮转 (2)_B__ 优先权是在创建进程时确定的,确定之后在整个进程运行期间不再改变。 A. 作业 B. 静态 C. 动态 D. 资源 (3)__A___ 是作业存在的惟一标志。 A. 作业控制块 B. 作业名 C. 进程控制块 D. 进程名 (4)设有四个作业同时到达,每个作业的执行时间均为2小时,它们在一台处理器上按单道方式运行,则平均周转时间为_ B_ 。 A. l小时 B. 5小时 C. 2.5小时 D. 8小时 (5)现有3个同时到达的作业J1、J2和J3,它们的执行时间分别是T1、T2和T3,且T1<T2<T3。系统按单道方式运行且采用短作业优先算法,则平均周转时间是_C_ 。 A. T1+T2+T3 B. (T1+T2+T3)/3 C. (3T1+2T2+T3)/3 D. (T1+2T2+3T3)/3 (6)__D__ 是指从作业提交给系统到作业完成的时间间隔。 A. 运行时间 B. 响应时间 C. 等待时间 D. 周转时间 (7)下述作业调度算法中,_ C_调度算法与作业的估计运行时间有关。 A. 先来先服务 B. 多级队列 C. 短作业优先 D. 时间片轮转 2)填空题 (1)进程的调度方式有两种,一种是抢占(剥夺)式,另一种是非抢占(非剥夺)式。 (2)在_FCFS_ 调度算法中,按照进程进入就绪队列的先后次序来分配处理机。 (3)采用时间片轮转法时,时间片过大,就会使轮转法转化为FCFS_ 调度算法。 (4)一个作业可以分成若干顺序处理的加工步骤,每个加工步骤称为一个_作业步_ 。 (5)作业生存期共经历四个状态,它们是提交、后备、运行和完成。 (6)既考虑作业等待时间,又考虑作业执行时间的调度算法是_高响应比优先____ 。 3)解答题 (1)单道批处理系统中有4个作业,其有关情况如表3-9所示。在采用响应比高者优先调度算法时分别计算其平均周转时间T和平均带权周转时间W。(运行时间为小时,按十进制计算) 表3-9 作业的提交时间和运行时间 2.1 一类操作系统服务提供对用户很有用的函数,主要包括用户界面、程序执行、I/O操作、文件系统操作、通信、错误检测等。 另一类操作系统函数不是帮助用户而是确保系统本身高效运行,包括资源分配、统计、保护和安全等。 这两类服务的区别在于服务的对象不同,一类是针对用户,另一类是针对系统本身。 2.6 优点:采用同样的系统调用界面,可以使用户的程序代码用相同的方式被写入设备和文件,利于用户程序的开发。还利于设备驱动程序代码,可以支持规范定义的API。 缺点:系统调用为所需要的服务提供最小的系统接口来实现所需要的功能,由于设备和文件读写速度不同,若是同一接口的话可能会处理不过来。 2.9 策略决定做什么,机制决定如何做。他们两个的区分对于灵活性来说很重要。策略可能会随时间或位置而有所改变。在最坏的情况下,每次策略改变都可能需要底层机制的改变。系统更需要通用机制,这样策略的改变只需要重定义一些系统参数,而不需要改变机制,提高了系统灵活性。 3.1、短期调度:从准备执行的进程中选择进程,并为之分配CPU; 中期调度:在分时系统中使用,进程能从内存中移出,之后,进程能被重新调入内存,并从中断处继续执行,采用了交换的方案。 长期调度:从缓冲池中选择进程,并装入内存以准备执行。 它们的主要区别是它们执行的频率。短期调度必须频繁地为CPU选择新进程,而长期调度程序执行地并不频繁,只有当进程离开系统后,才可能需要调度长期调度程序。 3.4、当控制返回到父进程时,value值不变,A行将输出:PARENT:value=5。 4.1、对于顺序结构的程序来说,单线程要比多线程的功能好,比如(1)输入三角形的三边长,求三角形面积;(2)从键盘输入一个大写字母,将它改为小写字母输出。 习题4 以下如果没有指明变量t 的取值范围,一般视为R t ∈,平稳过程指宽平稳过程。 1. 设Ut t X sin )(=,这里U 为)2,0(π上的均匀分布. (a ) 若Λ,2,1=t ,证明},2,1),({Λ=t t X 是宽平稳但不是严平稳, (b ) 设),0[∞∈t ,证明}0),({≥t t X 既不是严平稳也不是宽平稳过程. 证明:(a )验证宽平稳的性质 Λ,2,1,0)cos (2121)sin()sin()(2020==-=? ==?t Ut t dU Ut Ut E t EX π π ππ ))cos()(cos(2 1 )sin (sin ))(),((U s t U s t E Us Ut E s X t X COV ---=?= t U s t s t U s t s t ππ π21}])[cos(1])[cos(1{212020? +++--= s t ≠=,0 2 1 Ut Esin ))(),((2= =t X t X COV (b) ,)),2cos(1(21 )(有关与t t t t EX ππ-= .)2sin(81 21DX(t)有关,不平稳,与t t t ππ-= 2. 设},2,1,{Λ=n X n 是平稳序列,定义Λ Λ,2,1},,2,1,{) (==i n X i n 为 Λ,,)1(1)1()2(1)1(---=-=n n n n n n X X X X X X ,证明:这些序列仍是平稳的. 证明:已知,)(),(,,2 t X X COV DX m EX t t n n n γσ===+ 2 121)1(1)1()1(2)(,0σγσ≡+=-==-=--n n n n n n X X D DX EX EX EX ) 1()1()(2),(),() ,(),(),(),(111111) 1()1(++--=+--=--=--+-+-++--+++t t t X X COV X X COV X X COV X X COV X X X X COV X X COV n t n n t n n t n n t n n n t n t n n t n γγγ显然,) 1(n X 为平稳过程. 同理可证,Λ,,) 3()2(n n X X 亦为平稳过程. 1.1在多道程序和分时环境中,多个用户同时共享一个系统,返种情冴导致多种安全问题。a. 列出此类的问题b.在一个分时机器中,能否确保像在与用机器上一样的安全度?并解释乀。 Answer:a.窃叏戒者复制某用户癿程序戒数据;没有合理癿预算来使用资源(CPU,内存,磁盘空闱,外围设备)b.应该丌行,因为人类设计癿仸何保护机制都会丌可避兊癿被另外癿人所破译,而丏径自信癿认为程序本身癿实现是正确癿是一件困难癿亊。 1.2资源的利用问题在各种各样的操作系统中出现。试例丼在下列的环境中哪种资源必须被严栺的管理。(a)大型电脑戒迷你电脑系统(b)不服务器相联的工作站(c)手持电脑 Answer: (a)大型电脑戒迷你电脑系统:内存呾CPU资源,外存,网络带宽(b)不服务器相联癿工作站:内存呾CPU资源(c)手持电脑:功率消耗,内存资源 1.3在什举情冴下一个用户使用一个分时系统比使用一台个人计算机戒单用户 工作站更好? Answer:当另外使用分时系统癿用户较少时,仸务十分巨大,硬件速度径快,分时系统有意丿。充分利用该系统可以对用户癿问题产生影响。比起个人电脑,问题可以被更快癿解决。迓有一种可能収生癿情冴是在同一时闱有许多另外癿用户在同一时闱使用资源。当作业足够小,丏能在个人计算机上合理癿运行时,以及当个人计算机癿性能能够充分癿运行程序来达到用户癿满意时,个人计算机是最好癿,。 1.4在下面丼出的三个功能中,哪个功能在下列两种环境下,(a)手持装置(b)实 时系统需要操作系统的支持?(a)批处理程序(b)虚拟存储器(c)分时 Answer:对二实时系统来说,操作系统需要以一种公平癿方式支持虚拟存储器呾分时系统。对二手持系统,操作系统需要提供虚拟存储器,但是丌需要提供分时系统。批处理程序在两种环境中都是非必需癿。 1.5描述对称多处理(SMP)和非对称多处理乀间的区别。多处理系统的三个优点和一个缺点? Answer:SMP意味着所以处理器都对等,而丏I/O可以在仸何处理器上运行。非对称多处理有一个主处理器控制系统,不剩下癿处理器是随从关系。主处理器为从处理器安排工作,而丏I/O也叧在主处理器上运行。多处理器系统能比单处理器系统节省资金,返是因为他们能共享外设,大容量存储呾电源供给。它们可以更快速癿运行程序呾增加可靠性。多处理器系统能比单处理器系统在软、硬件上也更复杂(增加计算量、觃模经济、增加可靠性) 1.6集群系统不多道程序系统的区别是什举?两台机器属二一个集群来协作提 供一个高可靠性的服务器的要求是什举? Answer:集群系统是由多个计算机耦合成单一系统幵分布二整个集群来完成计算仸务。另一方面,多道程序系统可以被看做是一个有多个CPU组成癿单一癿物理实体。集群系统癿耦合度比多道程序系统癿要低。集群系统通过消息迕行通信,而多道程序系统是通过共享癿存储空闱。为了两台处理器提供较高癿可靠性服务,两台机器上癿状态必项被复制,幵丏要持续癿更新。当一台处理器出现敀障时,另一台处理器能够接管敀障处理癿功能。 1.7试区分分布式系统(distribute system)的客户机-服务器(client-server)模型不对等系统(peer-to-peer)模型 第一章操作系统引论 一、填空题 1~5 BCABA 6~8BCB 、填空题 处理机管理 计算机硬件 分时系统 单道批处理系统 、简答题 1. 什么叫多道程序?试述多道程序设计技术的基本思想 及特征。为什么对作业 进行多道批处理可以提高系统效率? 多道程序设计技术是指在计算机内存中同时存放几道相互独立的程序, 使它 们在管理程序控制下,相互穿插运行。 基本思想:在计算机的内存中同时存放多道相互独立的程序, 当某道程序因 某种原因不能继续运行下去时候,管理程序就将另一道程序投入运行,这样使几 道程序在系统内并行工作,可使中央处理机及外设尽量处于忙碌状态, 从而大大 提高计算机使用效率。 特征:多道性;无序性;调度性 在批处理系统中采用多道程序设计技术形成多道批处理系统, 多个作业成批送入 计算机,由作业调度程序自动选择作业运行,这样提高了系统效率。 2. 批处理系统、分时系统和实时系统各有什么特点?各适合应用于哪些方面? 批处 理系统得特征:资源利用率高;系统吞吐量大;平均周转时间长;无交 互能力。适用于那些需要较长时间才能完成的大作业。 分时系统的特征:多路性;独立性;及时性;交互性。适合进行各种事务处 理,并为进行软件开发提供了一个良好的环境。 实时系统的特征:多路性;独立性;实时性;可靠性;交互性。适合对随机发生 的外部事件能做出及时地响应和处理的系统, 如实时控制系统,实时信息处理系 统。1、 2、 存储器管理 设备管理 计算机软件 实时系统 批处理系统 多道批处理系统 文件管理 第二章进程管理 一、填空题 1~6 CBABBB 7 ① A ② C ③ B ④ D 8 ① D ② B 9 ~10 CA 11~15 CBBDB 16~18 DDC 20~21 BB 22 ① B ② D ③ F 25 B 26~30 BDACB 31~32 AD 二、填空题 1、动态性并发性 2、可用资源的数量等待使用资源的进程数 3、一次只允许一个进程使用的共享资源每个进程中访问临界资源的那段代码 4、执行态就绪态等待态 5、程序数据进程控制块进程控制块 &同步关系 7、等待 8、进程控制块 9、P V 11、同步互斥同步互斥 12、P V P V P V 13、封闭性 14、-(m-1)~1 15、② 16、动静 17、4 0 18、s-1<0 19、①③ 三、简答题 1.在操作系统中为什么要引入进程的概念?进程和程序的关系? 现代计算机系统中程序并发执行和资源共享的需要,使得系统的工作情况变得非常复杂,而程序作为机器指令集合,这一静态概念已经不能如实反映程序并发执行过程的动态性,因此,引入进程的概念来描述程序的动态执行过程。这对于我们理解、描述和设计操作系统具有重要意义。 进程和程序关系类似生活中的炒菜与菜谱。菜谱相同,而各人炒出来的菜的味道却差别很大。原因是菜谱基本上是一种静态描述,它不可能把所有执行的动态过程中,涉及的时空、环境等因素一一用指令描述清楚。 2.试从动态性、并发性和独立性上比较进程和程序。 动态性:进程的实质是进程实体的一次执行过程。动态性是进程的基本特征。而程序只是一组有序指令的集合,其本身不具有动态的含义,因而是静态的。 并发性:并发性是进程的重要特征,引入进程的目的也正是为了使其进程实体能和其他进程实体并发执行,而程序是不能并发执行的。 独立性:进程的独立性表现在进程实体是一个能独立运行、独立分配资源和独立接受调度的基本单位。而程序不能做为一个独立的单位参与运行。 3.何谓进程,进程由哪些部分组成? 进程是进程实体的运行过程,是系统进行资源分配和调度的一个独立单位进程由程序段,数据段,进程控制块三部分组成。 《计算机操作系统》课后习题答案 注:课本为《计算机操作系统(第四版)》,汤小丹梁红兵哲凤屏汤子瀛编着,西安电子科技大学出版社出版 第一章 1.设计现代OS的主要目标是什么 答:(1)有效性(2)方便性(3)可扩充性(4)开放性 2.OS的作用可表现在哪几个方面 答:(1)OS作为用户与计算机硬件系统之间的接口 (2)OS作为计算机系统资源的管理者 (3)OS实现了对计算机资源的抽象 3.为什么说OS实现了对计算机资源的抽象 答:OS首先在裸机上覆盖一层I/O设备管理软件,实现了对计算机硬件操作的第一层次抽象;在第一层软件上再覆盖文件管理软件,实现了对硬件资源操作的第二层次抽象。OS 通过在计算机硬件上安装多层系统软件,增强了系统功能,隐藏了对硬件操作的细节,由它们共同实现了对计算机资源的抽象。 4.试说明推动多道批处理系统形成和发展的主要动力是什么 答:主要动力来源于四个方面的社会需求与技术发展: (1)不断提高计算机资源的利用率; (2)方便用户; (3)器件的不断更新换代; (4)计算机体系结构的不断发展。 5.何谓脱机I/O和联机I/O 答:脱机I/O 是指事先将装有用户程序和数据的纸带或卡片装入纸带输入机或卡片机,在外围机的控制下,把纸带或卡片上的数据或程序输入到磁带上。该方式下的输入输出由外围机控制完成,是在脱离主机的情况下进行的。 而联机I/O方式是指程序和数据的输入输出都是在主机的直接控制下进行的。 6.试说明推动分时系统形成和发展的主要动力是什么 答:推动分时系统形成和发展的主要动力是更好地满足用户的需要。主要表现在:CPU 的分时使用缩短了作业的平均周转时间;人机交互能力使用户能直接控制自己的作业;主机的共享使多用户能同时使用同一台计算机,独立地处理自己的作业。 7.实现分时系统的关键问题是什么应如何解决 答:关键问题是当用户在自己的终端上键入命令时,系统应能及时接收并及时处理该命令, 课本课后题部分答案 第一章 1.设计现代OS的主要目标是什么? 答:(1)有效性(2)方便性(3)可扩充性(4)开放性 2.OS的作用可表现在哪几个方面? 答:(1)OS作为用户与计算机硬件系统之间的接口 (2)OS作为计算机系统资源的管理者 (3)OS实现了对计算机资源的抽象 13.OS有哪几大特征?其最基本的特征是什么? 答:并发性、共享性、虚拟性和异步性四个基本特征;最基本的特征是并发性。14.处理机管理有哪些主要功能?它们的主要任务是什么? 答:处理机管理的主要功能是:进程管理、进程同步、进程通信和处理机调度; 进程管理:为作业创建进程,撤销已结束进程,控制进程在运行过程中的状态转换。进程同步:为多个进程(含线程)的运行进行协调。 通信:用来实现在相互合作的进程之间的信息交换。 处理机调度: (1)作业调度。从后备队里按照一定的算法,选出若干个作业,为他们分配运行所需的资源(首选是分配内存)。 (2)进程调度:从进程的就绪队列中,按照一定算法选出一个进程,把处理机分配给它,并设置运行现场,使进程投入执行。 15.内存管理有哪些主要功能?他们的主要任务是什么? 北京石油化工学院信息工程学院计算机系3/48 《计算机操作系统》习题参考答案余有明与计07和计G09的同学们编著 3/48 答:内存管理的主要功能有:内存分配、内存保护、地址映射和内存扩充。 内存分配:为每道程序分配内存。 内存保护:确保每道用户程序都只在自己的内存空间运行,彼此互不干扰。 地址映射:将地址空间的逻辑地址转换为内存空间与对应的物理地址。 内存扩充:用于实现请求调用功能,置换功能等。 16.设备管理有哪些主要功能?其主要任务是什么? 答:主要功能有: 缓冲管理、设备分配和设备处理以及虚拟设备等。 主要任务: 完成用户提出的I/O 请求,为用户分配I/O 设备;提高CPU 和I/O 设 备的利用率;提高I/O速度;以及方便用户使用I/O设备. 17.文件管理有哪些主要功能?其主要任务是什么? 答:文件管理主要功能:文件存储空间的管理、目录管理、文件的读/写管理和保护。文件管理的主要任务:管理用户文件和系统文件,方便用户使用,保证文件安全性。 第二章 1.什么是前趋图?为什么要引入前趋图? 答:前趋图(Precedence Graph)是一个有向无循环图,记为DAG(Directed Acyclic Graph),用于描述进程之间执行的前后关系。工程力学课后习题答案解析
操作系统课后习题答案
工程力学课后习题答案主编佘斌
随机过程习题答案A
工程力学课后习题答案
工程力学课后习题解答
操作系统课后题及答案
工程力学-课后习题答案
随机过程复习题(含答案)
计算机操作系统习题及答案
操作系统课后题答案
随机过程-方兆本-第三版-课后习题答案
操作系统概念课后习题答案整理.doc
操作系统课后习题答案
计算机操作系统第四版课后习题答案
(完整版)操作系统课后题答案
相关主题
文本预览