
?
?技术规格
?外形尺寸
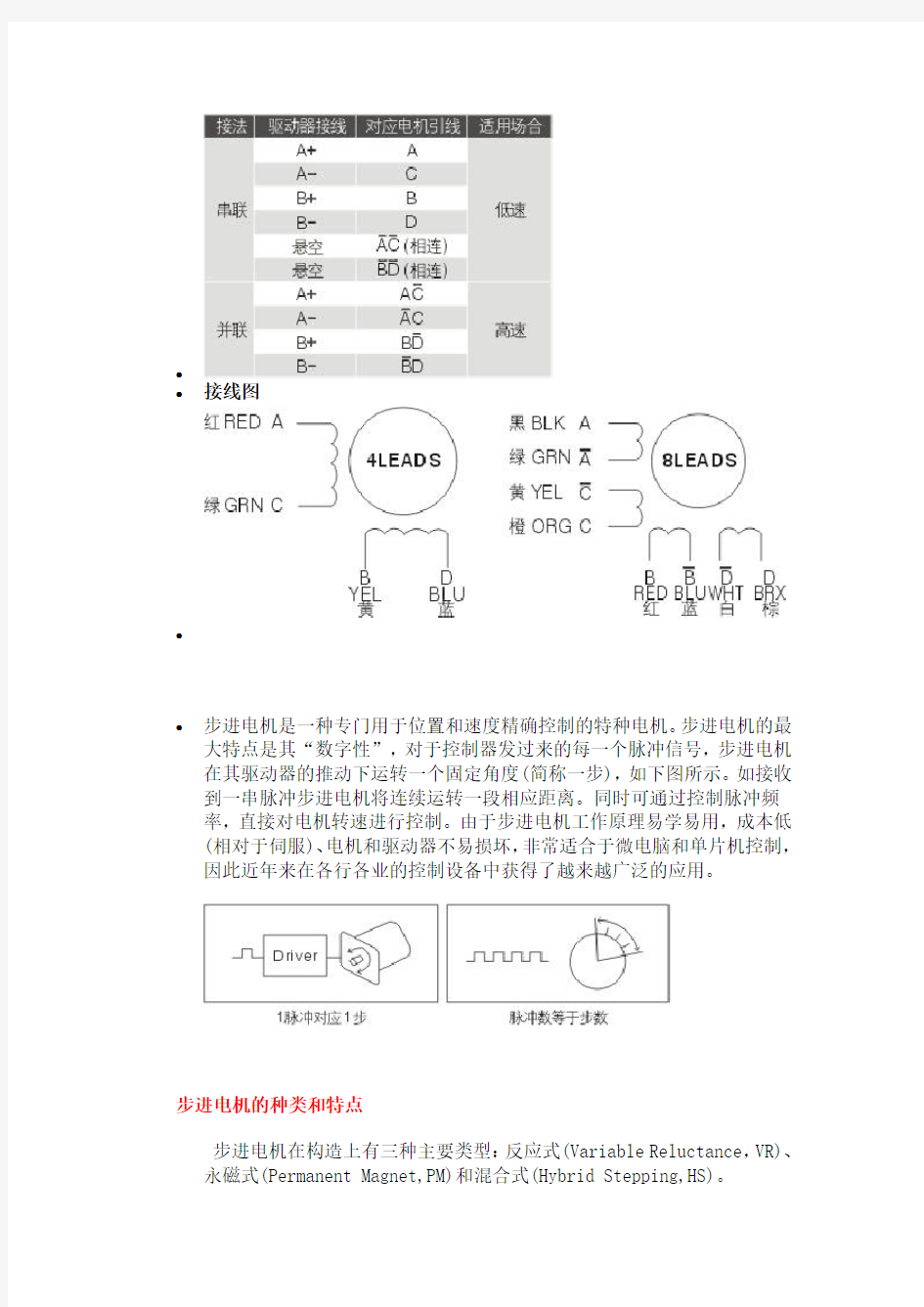
引线接法
?
?接线图
?
?步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点
步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
* 混合式
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进电机可配不同细分的驱动器以改变精度和效果。
雷赛步进电机系列
雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。
雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。
两相步进电机命名规则
<>
上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。
三相步进电机命名规则
<>
上例表示机座号为57mm,三相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。
两相步进电机选型列表
三相步进电机选型列表
什么是步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。仅仅处于一种盲目的仿制阶段。这就给用户在产品选型、使用中造成许多麻烦。签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。望能对广大用户在选型、使用、及整机改进时有所帮助。 二、感应子式步进电机工作原理 (一)反应式步 进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。 0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图: 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。 如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。 如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て 这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。 由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。
ULN2003 步进电机驱动板使用说明 一、主要技术参数 1、工作电压DC 4-12V 2、工作电流≤500mA 3、适用于2 相5 线步进电机 4、带工作指示灯,方便客户观察工作状态。同时也可以用于板子自测,5-12V 处 通上电源后,将电源的正极分别去接IN1-IN4 对应的指示灯会亮,表明板子是好的。 5、ULN2003 最高工作电压可以达到DC30V,如果客户需要接24V 等步进电机,需 要将板子上的限流电阻加大,以免烧坏工作指示灯。 二、ULN2003 简介 三、驱动板接5V 和12V 电机与单片机系统板的连接图
四、步进电机工作方式 电机可以使用单四拍、双四拍和八拍方式驱动 4.1 单四拍: A-B-C-D(0001、0010、0100、1000) #include
} main() { unsigned char i; while(1) { for(i=0;i<4;i++) //4 相 { P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格 Delay(500); //改变这个参数可以调整电机转速 } } } 4.2 双四拍:AB-BC-CD-DA(0011、0110、1100、1001) #include
如何选择合适的步进电机 1. 负载分类: (1)Tf力矩负载: Tf = G·r G 重物重量 r 半径 (2)TJ惯性负载: J = M(R12+R22)/ 32 (Kg·cm) M:质量 R1:外径 R2:内径 TJ = J·dw/dt dw/dt 为角加速度 2.力矩曲线图的说明 力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
说明: 1. 工作频率点:表示步进电机在该点的转速值。单位:Hz n=Θ*Hz / (360*D) n 转/秒 Hz 该点的频率值 D 电路的细分值, Θ步进电机的步距角 例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒 2. 起动区域:步进电机可以直接起动或停止的区域。 3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。 4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。 5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。 6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。 7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。由于运动惯性的原因,所以,运行力矩要比起动力矩大。 3 加速和减速运动的控制 当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
步进电机接线图标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
接线图 适配驱动器 电机型号 适配驱动器 57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H850/ND556/ND882/M415B/M325 57HS06 57HS09 57HSM09 57HS13 DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88 2 57HS22 步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近 年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达°、但动态 性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好, 步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为°/步,配上半步驱动器后,步距角减少为°,配上细分驱动器后其步距角可细分达256倍°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进 电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35 -130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。
如何选择合适的步进电机 2004年3月14日 1. 负载分类: (1)Tf力矩负载: Tf = G·r G 重物重量 r 半径 (2)TJ惯性负载: J = M(R12+R22)/ 32 (Kg·c m) M:质量 R1:外径 R2:内径 TJ = J·dw/dt dw/dt 为角加速度 2.力矩曲线图的说明 力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
说明: 1. 工作频率点:表示步进电机在该点的转速值。单位:Hz n=Θ*Hz / (360*D) n 转/秒 Hz 该点的频率值 D 电路的细分值, Θ步进电机的步距角 例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒 2. 起动区域:步进电机可以直接起动或停止的区域。 3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。 4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。 5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。 6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。 7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。由于运动惯性的原因,所以,运行力矩要比起动力矩大。 3 加速和减速运动的控制 当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
? ?技术规格 ?外形尺寸 引线接法
? ?接线图 ? ?步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。 其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。 同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <>
? 步距精度 +5%(整步、空载) 温升80°CMax 环境温度-10°C -- +50°C 绝缘电阻100MΩmin.500VDC 耐压500VAC for one minute 径向跳动0.06 Max.(450g-load) 轴向跳动0.08 max.(450g-load) ?技术规格 Model No.相 数 步距 角 保持转 矩 额定电 流 相电 感 相电 阻 引线数 量 转子惯 量 定位转 矩 电机重 量 机身 长(°)N.M A mH Ohm g.cm2 Kg.cm Kg mm 42HS02 2 1.8 0.22 0.4 21 12.5 4 57 0.15 0.24 40 42HSM02 2 0.9 0.24 0.87 7.5 3.1 4 38 0.15 0.23 34 42HS03 2 1.8 0.34 1 4 4.6 8 0.2 200 0.34 48 ?外形尺寸 引线接法
? ?接线图 ? ?步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍 (0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变 精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <> 上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。 三相步进电机命名规则 <> 上例表示机座号为57mm,三相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。
电气控制技术 课程设计 题目: 步进电机的控制 院系名称:电气工程学院 成绩: 指导老师签名:
目录 1 系统概述 (1) 1.1 对被控对象步进电机控制的分析 (1) 1.2 设计的目的及工作内容 (1) 2 方案论证 (2) 2.1 开环控制系统 (2) 2.2 闭环控制系统 (2) 3 硬件设计 (3) 3.1 系统的原理方框图 (3) 3.2 I/O分配 (3) 3.3 主电路及I/O接线图 (4) 3.4 元器件选型 (4) 3.4.1 步进电机选型 (4) 3.4.2 PLC选型 (5) 3.4.3 按钮选型 (6) 3.4.4 熔断器选型 (6) 3.5 元件清单 (7) 4 软件设计 (4) 4.1 主流程 (8) 4.1.1 转速控制 (8) 4.1.2 正反转控制 (9) 4.1.3 步数控制 (9) 4.1.4 程序流程图 (9) 4.2 梯形图及其功能注释 (10) 5 系统调试 (14) 5.1 软件调试 (14) 5.2 硬件调试 (14) 5.2.1 转速控制过程 (14) 5.2.2 正反转控制过程 (14) 5.2.3 单步执行控制过程 (14) 5.3 调试结果分析 (14) 设计心得 (15) 参考文献 (16)
1 系统概述 1.1 对被控对象步进电机控制的分析 三相步进电动机是一种将电脉冲信号转换成直线位移或角位移的执行元件。步进电机的输出位移量与输入脉冲个数成正比,其转速与单位时间内输入的脉冲数(脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。所以只要控制指令脉冲的数量、频率及电机绕组通电相序,便可控制步进电机的输出位移量、速度和转向。步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式改变,都在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。典型步进电机外观如图1-1。 图1-1典型步进机 1.2 设计的目的及工作内容 本设计的主要研究内容是以三菱FX2N系列PLC(可编程逻辑控制器)为核心控制步进电机,及其相关外围电路组成的控制电路设计。可以通过对几个开关按钮的控制来实现对步进电机转动的方向、速度和步数的控制。 用PLC控制三相六拍步进电机实现如下操作,其控制要求如下: 三相步进电动机有三个绕组:A、B、C,正转的顺利为:A-AB-B-BC-C-CA-A;反转的顺利为:A-CA-C-BC-B-AB-A。 1.要求能实现正、反转控制,而且正、反转切换无须经过停车步骤。 2.具有两种转速: (1)开关闭合,则转过一个步距角需0.5s。
雷赛控制产品与伺服驱动配套应用小技巧 作者:李军 对于一些初次使用雷赛运动控制卡的客户来说,常常会在控制伺服电机时出现一些小问题,以致拖迟客户的发开进度,下面简单介绍一下常出现的3个问题,结合DMC5480控制卡实测的曲线为例,给出解决办法: 1、脉冲模式匹配问题 伺服驱动器的脉冲模式要与控制卡的脉冲模式保持一致,否则可能导致 A.伺服电机只能朝一个方向运动; B.做往返运动时会出现一个方向有累计 误差。 DMC5480卡的脉冲模式有6种,其中单脉冲模式(即方向+脉冲模式)4种,如图1所示;双脉冲模式2种,如图2所示。 A.出现伺服电机只往一个方向运动时,排除接线错误后,就有可能是控 制卡设置单脉冲模式(双脉冲模式),而伺服驱动器设置成双脉冲模式 (单脉冲模式)了,把伺服驱动器和控制卡设置成对应的脉冲模式即 可解决该问题。 B.做往返运动时会出现一个方向有累计误差时,是脉冲信号的上升沿或 下降沿选择错误,从而导致电机在换向时丢一个脉冲,随着往返次数 增加,产生的累计偏差也会越来越大。比如脉冲模式0是上升沿有效, 脉冲模式1是下降沿有效,控制卡设置脉冲模式0,而伺服电机的脉冲 信号实际上是下降沿有效,从图1可以看出来,换向后控制卡发出的 第一个脉冲信号将丢失,因为伺服驱动器接收的脉冲信号是下降沿有 效,所以脉冲换向都会丢失一个脉冲信号。双脉冲模式与单脉冲模式 的类似,在这不在重复了。 图1 单脉冲模式
图2 双脉冲模式 2、正确使用伺服使能SEVON信号 伺服上电后如果SEVON信号无效,伺服电机不会锁死,控制卡发脉冲给伺服,伺服也不会运动,所以伺服电机运动前一定要使能。许多客户可能认为伺服使能信号不重要,因此在实际应用中对该信号不予处理,直接导致设备在开机和关机时的异常响应,从而认为整个控制系统出现问题,通过下面的分析可以帮助大家解惑,希望能让大家对SEVON信号有效的帮助到设备的控制有更好的认识。 由于控制卡是插在PC的PCI插槽上的,由PC供给控制卡一个5V的电源,所以PC在开机和关机时,会有一个0-5V的电压变化的,也就是PC在开机和关机时会有一个等同于脉冲信号的电压变化信号发出来,如下述:a, 脉冲输出模式1时,脉冲结束时脉冲口电平状态如下图3: 图3 脉冲输出波形图
制造业自动化话术 Hessen was revised in January 2021
制造行业(自动化)话术脚本 自动化设备行业客户的业务模式及业务痛点 业务模式: 1,针对特定细分行业,面向仓库/工厂/物业等客户,有新客户和老客户新项目开发两种情况;渠道; 2,(1)直销,外勤为主,新客户和老客户新项目的销售过程,都是标准的项目型销售;对销售过程跟进有一定需求; (2)一般在合同签订后,会有一个施工/现场安装过程管理;分设备和机械; (3)此行业客户对售后服务管理有一定需求; (4)对费用管理关联项目有需求; (5)和ERP对接的需求; 业务痛点: 1,面向工业品的项目型销售周期一般3-12个月,客户跟单过程比较长,需要以客户为中心,站在客户的角度,帮助客户定义需求,形成项目采购目标,并帮助客户启动项目;所以需要一个销售推进的过程管理 2,在项目型销售执行上,更加强调客户关系、对销售流程的管理和销售团队的管理:在对销售流程管理和控制要求更加细致,一般最完整可视为八个阶段,分别是:a)项目立项;b)初步接触;c)方案设计;d)业绩展示;e)方案确认;f)项目评估;g)商务谈判;h)签约成交。 3,一般在合同签订后,会把合同需求传递至生产部门、仓管部门、实施/安装部门,依次进行备货、生产、入库、发货、现场准备、派工、安装、调试、验收、回款等步奏。其中备货、生产、入库、发货在ERP中进行管理。由于施工/安装团队需要在客户现场工作,因此有使用移动端软件对过程进行及时录入,及时监控,工作协同等需求。 4,此类型客户的销售过程为标准的项目型销售,销售员的工作量体现在拜访客户数量、电话/邮件/面谈等的次数、开拓线索/客户/商机的数量等,销售员业绩体现为成单及回款上(成单金额可细分至客户、产品)。 5,此类型客户对售后服务管理有迫切需求。 6.审批流关联业务对象 7.销售预测;客户公海池; 8.竞争对手管理;分析;
运动系统控制产品
使用手册
上海昀研自动化科技有限公司
二〇〇九年七月第三版
三相步进电机
返回目录
■ 42mmHB 系列三相步进电机
步 距 角(Step Angle) 步距精度(Step Accuracy) 温 升(Temperature Rise) 环境温度(Ambient Temperature Range) 绝缘等级(Insulation Class) 绝缘电阻(Insulation Resistance) 绝缘强度(Dielectric Strength) 径向跳动(radial runout) 轴向间隙(axial clearance) 1.2° ±5% 75℃ Max -20℃~+50℃ B 500VDC 100MΩ Min 500VAC 50Hz 1Ma Minute 0.02mmMax(450g 负载) 0.08mmMax(450g 负载)
技术参数(Specifications) 技术参数
型号 Model 步距角 机身长 额定电流 驱动器电源输入 保持转矩 Holding torque (N.m) 0.16 0.22 0.32 Step Angle Length Current Power Supply O () L(mm) (A/phase) (A) DC24V 1A DC24V 2A DC24V 1A 重量 转动惯量 适配驱动器 Rotor inertia Weight Matched driver 2 (g.cm ) (kg) 100 220 380 0.23 0.28 0.35 YK3605MA YK3605MA YK3605MA
423HB35-153 1.2 35 1.5 423HB40-153 1.2 40 1.5 423HB50-153 1.2 50 1.5 ▲以上仅为代表性产品,可按要求另行制作.
外形尺寸(Dimension) 外形尺寸(Dimension)
力矩测试数据(仅供参考) 力矩测试数据(仅供参考)
注意: ▲ 注意:
电机特性数据和技术数据都是在匹配我公司驱动器驱动的情况下测得,测试电压为 28VDC. 电机安装时务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度. 电机与驱动器连接时,请勿接错相.
1
SMC6480锁螺丝机控制系统的应用介绍 深圳市雷赛智能控制股份有限公司刘玉平赵向前 摘要: 编程是自动化设备开发过程中非常重要的一部分,目前有很多种流行的自动化设备开发语言,各种语言的编程难易程度、功能特点均不尽相同,而G代码因其易学易用、编程方便等优点已被广泛应用与数控机床以及其他自动化设备中。 SMC6480运动控制器与传统PLC运动控制系统相比在编程灵活性、插补性能及成本控制方面具有极大优势,不但具有PLC的I/O逻辑控制功能,而且不需要任何扩展模块即可实现高精度高速度直线插补、圆弧插补、螺旋插补等轨迹控制。本文通过一个自动锁螺丝机运动控制系统的案例,详细介绍了使用SMC6480运动控制器通过G代码编程控制锁螺丝动作并自动检测各种IO信号的方法。 关键词:运动控制器、G代码、锁螺丝 一、运动控制器简介 SMC6480运动控制器是雷赛智能自主研发的基于10/100M以太网的通用型独立式运动控制器,可支持多个控制器和PC机组成运动控制系统;也可脱机独立运行,应用于各种需要独立运行的场合。 本控制器基于嵌入式处理器和FPGA的硬件结构,插补算法、脉冲信号的产生及加速和减速控制、I/O信号的检测处理,均由硬件和固件实现,确保了运动控制高速、高精度及系统稳定。该系列控制器可控制4个步进或伺服电机,具有最高5MHz脉冲频率、四轴直线插补、两轴圆弧插补、连续曲线插补、S形曲线速度控制等高级功能。通过简单的编程即可开发出稳定可靠的高性能连续轨迹运动控制系统。 二、全自动锁螺丝机 图1、图2是某公司开发的两款全自动锁螺丝机,核心控制单元均采用SMC6480控制器,使用G代码编程控制整个锁螺丝的过程,其单轴锁螺丝的动作流程如图3所示。
产品详情 价格:180元最小采购量:不限品牌/型号:Leadshine雷赛/863S22、863S42、863S68H 额定转矩: 2.26/4.26/6.78(NM) 产品介绍 Leadshine雷赛86系列三相步进电机:863S22、863S42、863S68H的详细信息 ?品牌/型号:Leadshine雷赛/863S22、863S42、863S68H ?额定转矩:2.26/4.26/6.78(NM) ?产品类型:三相混和式步进电机 ?额定功率:22-50(W)W ?额定电压:24-48(V)V ?额定电流:5.0/5.0/3.5(A)A ?额定转速:1600(rpm)r/min ?外形尺寸:73/105/127(mm)mm ?产品认证:CE ?适用范围:3DM683/3ND583/3ND883/3ND1183/3ND2283 ?效率:98(%)% ? Leadshine雷赛86系列三相步进电机:863S22、863S42、863S68H ? o86系列三相步进电机 *以上仅为代表性产品 外形尺寸
接线图 步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。 如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控
制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩孝起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <> 上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。三相步进电机命名规则
三张接线图搞定步进电机接线问题很多小伙伴刚接触步进电机,步进电机驱动器,很有可能对于步进电机接线方法和步进电机接线图弄不明白,所以可能无从下手。下面这篇文章让您快速掌握步进电机的接线方法,三张实用的步进电机接线图教你快速解决。 首先,我们来看看连接步进电机接线方法。 第二步,连接步进电机驱动器的电源,如果在我们的步进电机使用直流24V供电可以与表控共用一个开关电源来供电。 第三步,来看一下连接步进电机驱动器与表控的控制接线: 1、将步进电机驱动器脉冲输入信号和方向输入信号的正极连接到表控的5V端子。 2、将步进电机驱动器脉冲输入信号的负端连接到表控的Y1输出端子上。 3、将步进电机驱动器方向输入信号的负端连接到表控的Y2输出端子上。
4、接下来就是设置步进电机驱动器的细分,一般可以放在8(1600)左右,通过初步调试后设置实际需要的细分。 5、设置步进电机的正转设置,参考设置,一行实现正转。X1是正转的启动开关。 6、步进电机反转的设置:X2是反向启动开关,Y1输出脉冲,Y2输出方向信号。两行实现反转动作。 好了,小编描述了步进电机接线和最基本的设置方法就到这里告一段落了,一般情况保证接线正确,但是要特别注意的是电源的极性,设置正确就可以正常运行。 看到这里,相信很多小伙伴对此已经非常熟悉了。步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲电机转轴步进一个步距角增量。电机总的回转角与输入脉冲
数成正比例,相应的转速取决于输入脉冲频率。步进电机通常被用作定位控制和定速控制。 下面为大家分享三张最实用的步进电机接线图! 二相混合式步进电机+三相混合式步进电机+五相混合式步进电机接线图 空心杯无刷电机接线图 工业级无刷电机接线图
ProU 软件应用心得1:运动控制卡与人机界面 深圳 Lipton 2018.08.16. 一. ProU软件简介 优易控ProU是应用与工业控制领域的软件。其硬件平台是基于Window系统的工控机,其软件可对运动控制卡、IO控制卡、EtherCAT总线伺服电机及模块、网络相机进行编程及控制。其系统结构如图1.1所示。 图1.1 ProU软件及硬件结构 ProU软件可在Windows XP、Win7、Win8、Win10操作系统(x86、x64)下运行,用于程序开发、调试以及监控。支持梯形图、工艺块、C语言三种编程方式。 在ProU软件之下还有一个ProH软件,它在目标机器上运行,负责程序执行及调度、数据管理、线程管理、通讯管理等。 1. ProU软件的特点 ●采用梯形图编程,与三菱PLC的梯形图兼容; ●人机界面美观、设计方便; ●集成了机器视觉功能,不需要编程,调用简单、方便。 ●集成了CAD图形设计、编辑功能,可将复杂的轨迹转换为G代码,并能在梯形图 中运行。 ProU软件特别适合熟悉PLC编程语言的工程师开发基于运动控制卡、EtherCAT总线产品的自动化设备的应用程序,而且使用机器视觉功能、CAD图形设计也十分方便、简单。 2. ProU软件的安装 直接运行ProU3.8.6.exe、ProH3.8.6.exe即可。 二. 运动控制卡的安装、配置与基本指令 一)运动控制卡的安装、配置 1. 以雷赛DMC1380运动控制卡为例:首先在计算机中安装好运动控制卡;然后按照运动控制卡的手册指引安装驱动软件;并用其测试软件检测硬件,确保电机、IO器件工作正常。硬件接线图如图 2.1所示。
五相步进马达的接线
让我来告诉你吧,先来看一下你的10根线,它应该有10种不同的颜色: 10线五相应该是 A相:兰--红 B相:白--黄 C相:棕--紫 D相:黑--灰 E相:橙--绿 你用万用表测量一下是不是如此先,如果是这样的话就对了。 然后要怎么改你应该知道了吧。 我的问题解决了,告诉大家方法啊,先分相成五组,然后用指针式万用表电压档找出五相的同名端,具体就是旋转电机每相都正偏的就是同名端,然后分清采用星型接法还是五边形接法如果星型接法,将五条同名端并到一起短接,然后就是相序的排列了,这个很难啊,如果你有时间一定能试出来,最好找到同品牌产品的说明书,我的电机一共搞了两天才好用,引用了一篇文章 判断步进电机的相序及首尾端 妙判断 步进电机的应用越来越普遍。在使用过程中,电机的相序主要靠引出线的颜色、长度来区分。若找不到说明书
或标记不清,则步进电机的接线将十分麻烦。笔者通过对步进电机工作原理的分析、得出步进电机相序及首尾端的判别方法。下面以五相步进电机为例(要准备一节9伏电池和一个万用表)。 1. 用万用表电阻挡找出步进电机的五相绕组:Al—A2、B1-B2、C1-C2、 D1-D2、El-E2,如附图所示。” 2,把万用表拨到直流微安挡。将万用表的表笔接到其中一相,如B相上,红表笔接B1,黑表笔接B2。 3.将电池分别接步进电机其余四相,在接通瞬间记下万用表指针摆动幅度。如果指针反转,则要调换电池极性。在四次接通的瞬间,指针有两次摆动幅度最大,说明这两次电池所接的是万用表所接B相旁边的两相,即A 相和C相。 4.将万用表接A相或C相中的一相,如接C相。用上述方法可找出C相旁边的两相:B相和D相。依此类推,可按顺序找出A、B、C,D、E五相相序。 5. 如附图所示,电池接A相,万用表接B相,在电池接通的瞬间,万用表指针正转(如指针反转,应调换电池极性),则电池正极所接的Al端和万用表红表笔所接的B1端为首端。依此方法,可以确定其余三相的首端C1,D1、E1。(肖正光)
序号英纳仕型号雷赛型号适配电机主要差别 1EZM322DM422/DM422C/DM 320C/M325/M415B 35/39/42 两相步进电机 接口完全兼容,但EZM322最低工作电压为12~36VDC,控制 频率可达250Khz,雷赛最低18VDC,控制最高100Khz 2EZM442DM442/DM432C /M542 42/57 两相步进电机 接口与DM442完全兼容,可互换 3EZM552DM556/M542 /ND556 57/86 两相步进电机 接口可与DM556互换,但EZM552另配PLC控制接口,与PLC 配合应用时无需接限流电阻 4EZM852M752 57/86 两相步进电机 EZM852另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有低振动和低噪声优势 5EZM872AM882/M860 /ND882 86 两相步进电机 EZM872另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有低振动和低噪声优势 6EZM872A MA860 86 两相步进电机 EZM872A另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 7EZM872H MA860H 86 两相步进电机 EZM872H另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 8EZM1172DM1182/ND1182 110 两相步进电机 EZM1172另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 9EZM2272DM2282/ND2282 130 两相步进电机 EZM2272另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 103EZM580DM856/ND583 57 三相步进电机 3EZM580另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 113EZM780DM856/ND583 57 三相步进电机 3EZM780另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 123EZM8803ND883 86 三相步进电机 3EZM880另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 133EZM880A空缺 86 三相步进电机 3EZM880A另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势,最高48VAC交流输入 143EZM880H空缺 86 三相步进电机 3EZM880H另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势,最高60VAC交流输入 153EZM1180 3DM1183 /3ND1183 110 三相步进电机 3EZM1183另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 163EZM2280 3DM2283 /3ND2283 130 三相步进电机 3EZM2280另配PLC控制接口,与PLC配合应用时无需接限流 电阻,具有低振动和低噪声优势 17EZD552空缺 42/57 两相步进电机 内置控制脉冲发生器,无需配部控制脉冲,通过IO控制, 实现电机位置和速度控制 18EZN552空缺 42/57 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 19EZN872空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 20EZN872A空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 21EZN872H空缺 86 两相步进电机 通过RS485总线和运动控制指令实现对步进电机速度和位置 控制,最多可接127节点 22EZS57HBS57 57 两相步进电机 EZS57另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有高速、低振动和低噪声优势 23EZS86HBS86 86 两相步进电机 EZS86另配PLC控制接口,与PLC配合应用时无需接限流电 阻,具有高速、低振动和低噪声优势 英纳仕步进驱动产品与雷赛步进驱动产品对照表
2相四线,四相五线,四相六线步进电机接线及驱动方法 分类:单片机2010-07-18 09:24 5085人阅读评论(9) 收藏举报 步进电机原理 按照常理来说,步进电机接线要根据线的颜色来区分接线。但是不同公司生产的步进电机,线的颜色不一样。特别是国外的步进电机。 那么,步进电机接线应该用万用表打表。 步进电机内部构造如下图:
通过上图可知,A,~A是联通的,B和~B是联通。那么,A和~A是一组a,B和~B是一组b。 不管是两相四相,四相五线,四相六线步进电机。内部构造都是如此。至于究竟是四线,五线,还是六线。就要看A和~A之间,B和B~之间有没有公共端com抽线。如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。 所以,要弄清步进电机如何接线,只需把a组和b组分开。用万用表打。 四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。所以,用万用表测,不连通的是一组。 五线:由于五线中,a和b组的公共端是连接在一起的。用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。 六线:a和b组的公共抽线com端是不连通的。同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。 步进电机相关概念 相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。 拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的) 静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积(几何尺寸)的标准,与驱动电压及驱动电源等无关。 步进电机驱动 驱动步进电机,无非是给电机a和b组先轮流给连续的脉冲,步进电机就可以驱动了。 步进电机驱动码: