
非接触光栅系统安装与使用指南
RGS20-S 、RGS40-S 光栅安装
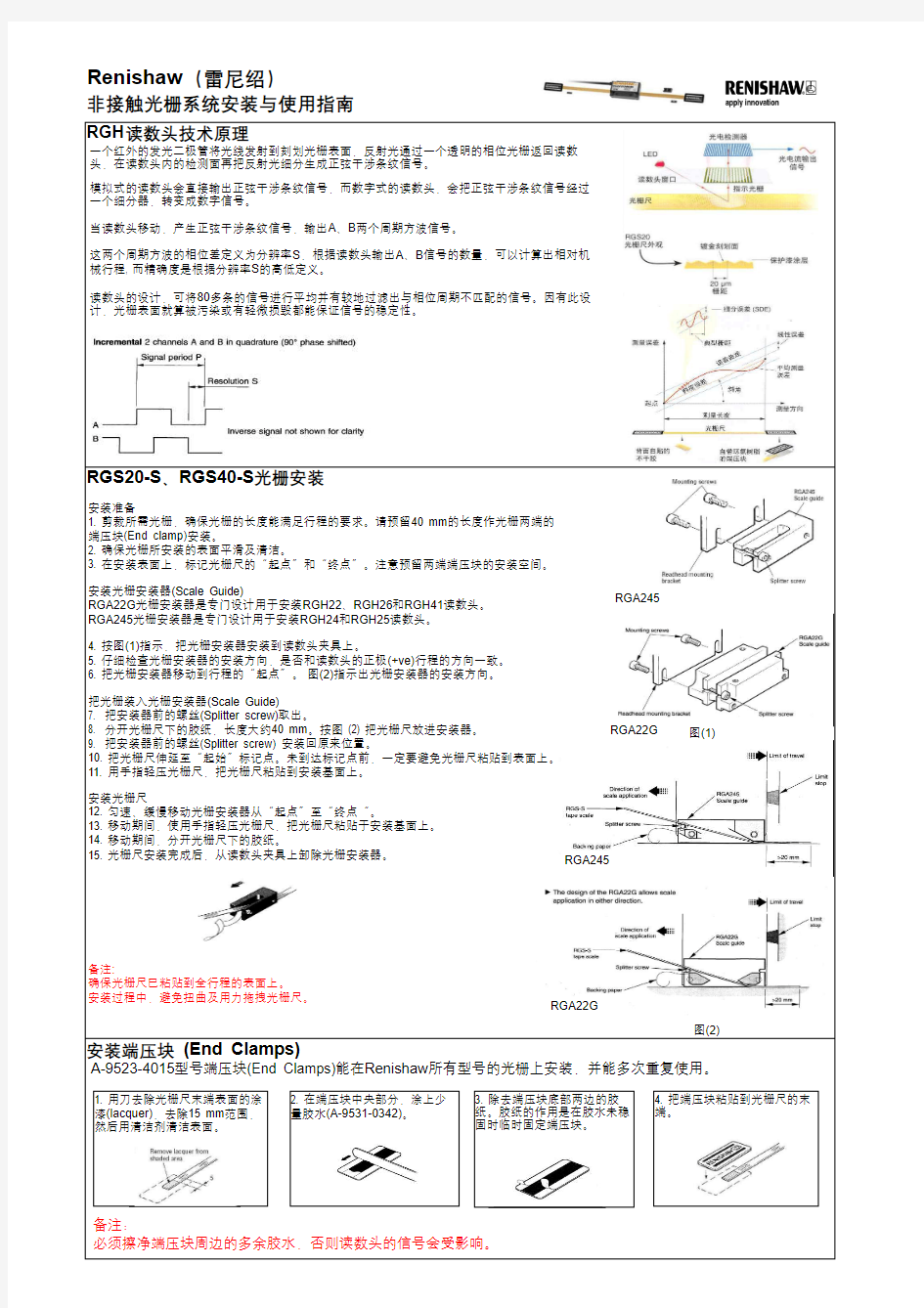
(End Clamps)
Renishaw (雷尼绍)
安装准备
1. 剪裁所需光栅,确保光栅的长度能满足行程的要求。请预留把光栅尺伸延至“起始”标记点。未到达标记点前,一定要避免光栅尺粘贴到表面上。确保光栅尺已粘贴到全行程的表面上。
安装过程中,避免扭曲及用力拖拽光栅尺。
图(1)
图(2)
除去端压块底部两边的胶纸。胶纸的作用是在胶水未稳固时临时固定端压块。
4. 把端压块粘贴到光栅尺的末端。
备注:
必须擦净端压块周边的多余胶水,否则读数头的信号会受影响。
型号端压块(End Clamps)所有型号的光栅上安装,并能多次重复使用。
RGA22G
RGA245
RGA245
RGA22G
读数头安装
读数头设定
图(3)
图(3)是一个简单安装支架设计。螺丝(A) ---- 夹紧读数头,设定Pitch 参数螺丝(B) ---- 设定Yaw 参数和偏移螺丝(C) ---- 可设定Roll 参数
安装支架设定
固定读数头的托架,必须有平坦表面,能满足读数头安装上的机械公差。其次必须能调节读数头高度并有足够的稳定性,以预防在读数头工作期间所受到的所有外界影响。为了减少光栅的安装问题,在未使用光栅安装器(Scale Guide)粘贴光栅前,请先把机械托架的Roll 参数和Yaw 参数调节到读数头的误差范围内,可使用clock gauge 或precision square 完成设定。
对于RGH22、RGH26和RGH41,设定读数头的高度,可透过蓝色和或橙色的校准胶片放置于读数头和光栅尺之间,读数头的LED 安装指示灯显示绿色,表示安装正确。
橙色的校准胶片还可以帮助设定读数头相对于光栅尺的偏移和Yaw 参数 。
对于RGH24和RGH25读数头,设定只可透过蓝色校准胶片放置于读数头和光栅尺之间, 读数头的LED 安装指示灯显示绿色,表示安装正确。
读数头高度设定完成后,以缓慢的速度移动读数头,确保读数头的指示灯在光栅尺的整个行程内都保持绿色。RGB25和RGH41提供外置设定信号 (X 或Vx),当LED 指示灯失效时,可提供另一个安装参考。外置设定信号是一个5 V 电源,信号为5 V 表示设定正确,当信号为0 V 时,表示需重新设定。
备注:
安装读数头的螺丝力矩大约在0.5 Nm 至0.7 Nm 之间。光栅尺、读数头的信号窗口和托架表面都必须保持清洁。
RGH22、RGH26和RGH41
设定读数头简介图
外置设定信号
RGH24和RGH25设定读数头简介图
LED 安装指示灯显示强度比例
警报信号:读数头接收信号低于15%
限位开关(Limit switch)
参考零位 ( Reference mark )
参考零位(Reference mark)和限位开关(Limit switch)的安装方法
参考零位(Reference mark)的同步方法
限位开关(Limit switch)是一个磁性开关, 当读数头通过限位开关,读数头内的磁力感应器会发出一个输出信号(Q)。
附加双限位开关(Dual Limitswitch)
可在轴向运动到两端停止点时给出各自独立的信号(P 、Q)。一个是正极上限的输出信号(P),另一个是负极下限的输出信号(Q)。
没有“白点”记号的限位开关发出(P)信号有“白点”记号的会发出(Q)信号
双限位开关
限位开关信号图
参考零位(Reference mark)是一个磁性开关,提供一个可重复定位的参考原点或零点。当读数头通过时,读数头内的磁力感应器会发出一个准确的输出信号(Z) 。
读数头的正反轴向运动都会产生参考零位信号(Z) , 信号(Z)的产生没有轴向的要求,但光栅系统的重复性是单向的,因此只有在参考零位和读数头同步的方向光栅系统的重复性才能得到保证。
为了达到无方向条件的重复性光栅系统要求,参考零位的信号必须与光栅测量信号(A 、 B )同步。
橙色的校准胶片提供参考零位(Reference mark)和限位开关(Limit switch)的标准安装粘贴位置。可选用胶水(A-9531-0342)。
根据机器回归零位的动作方向移动读数头。当参考零位和读数头测量信号(A 、B )同步时,读数头的LED 安装指示灯会闪亮红色0.25秒,表示同步正确。
如果读数头的LED 安装指示灯闪亮橙色或没有灯光,安装人员应当逆时针方向转动参考零位上的设定螺丝,转动1/8转,如果读数头的LED 安装指示灯转为红色,则表示读数头和参考零位(Reference mark)已同步。
同步设定螺丝
同步信号图
请使用以下公式,检查机器控制器的读数频率能否与读数头匹配。
不能用手指直接接触读数头的读数窗口。
(Acetone )、苯(Benzene)和酒精清洁光栅尺。
最好用洁净、柔软的无绒干布轻擦,无需使用任何清洗剂。如果尺面太脏,只能用软布沾少许庚烷 (Propan-2-ol)擦拭,不得用力。切勿使钢带长时间浸入任何液体中。
QC20-W无线球杆仪系统 硬件 软件
QC20-W 球杆仪及球杆仪组件 QC20-W 球杆仪包括一个雷尼绍自主设计的精密位移传感器(已申请专利)。它用于测量球杆仪在绕一个固定点旋转时的半径变化。该数据用于根据 ISO 230-4、ASME B5.54/57和GB17421.4等国际标准计算定位精度的总体测量值(圆度、圆度偏差)。在采用雷尼绍独特的诊断报告格式分析该数据时,还可提供单个误差源的详细诊断。数据以图形和数字的格式显示,用以帮助故障诊断。 信号处理在球杆仪内部进行,数据传输使用Bluetooth ?(蓝牙)二类模块输送至匹配的个人计算机中。传感器壳体上有一个LED 状态指示灯,对通讯、电池和故障状态进行指示。 每套系统随机配备一只标准(非充电型)CR2锂电池,不过系统的电子装置和组件也允许使用可充电CR2电池。 Zerodur ?校准规 每套QC20-W 组件 (A-8014-1510) 均随附一个Zerodur ?校准规,用于校准球杆仪的长度。它是由零温度膨胀系数的材料制成的。 当与Zerodur ?校准规配合使用时,QC20-W 球杆仪可以计算绝对(而不是相对)误差,来决定各轴比例匹配关系和径向偏差值,满足ISO 230-4和ASME B5.54/57分析所需。 此外,此软件还会自动计算待测机器的位置公差。(位置公差值是在球杆仪测试区域、在无负载条件下对机器在某一平面内双向定位精度好坏的一个估计) Zerodur ?校准规可以校准100 mm 、150 mm 及300 mm 的长度。小圆组件包含一个50 mm Zerodur ?校准规。 QC20-W 球杆仪组件 组件包括 ? QC20-W 无线球杆仪(和一只CR2电池)? 中心座 ? 工具杯 ? 50、150和300 mm 加长杆? Zerodur ?校准规? 系统软件(含手册)? 中心设定球? 机器验证卡 ? 校准证书 ? 系统便携箱(便携箱组件包括用于存放小圆组件和VTL 适配器的带槽口的海绵块) Zerodur ?为Schott Glass T echnologies Inc.公司的商标。 2 QC20-W 球杆仪 Bluetooth 文字商标和标识归Bluetooth SIG, Inc.所有,Renishaw plc 使用的所有此类商标均已获得授权。其他商标和商品名为各自所有者拥有。
南开大学 硅光电子学与储能实验室 Four-Point Probe Operation | 2011 四探针操作手册
四探针操作说明书 Four-Point Probe Operation 第1章引言 (1) 1. 目的 (1) 2. 应用范围 (1) 3. 测试设备 (1) 四探针 (1) 数字电压源表 (2) 第2章原理简述 (3) 1. 薄膜(厚度≤4mm)电阻率: (3) 2. 薄膜方块电阻 (3) 第3章操作方法 (5) 1. 引言 (5) 2. 测试线连接方式 (5) 3. KEITHLEY 2400高压源表设置指南 (6) 4. 探针接触方式 (8) 5. 数据测试指南 (8) 第4章注意事项 (10) 附表 ................................................................................................................................................... I
第1章引言 1.目的 本说明书主要介绍用四探针法测试薄膜方块电阻及电阻率的原理及具体操作方法。 2.应用范围 测量参数:方块电阻,电阻率 测量样品:均匀薄膜,均匀薄片 方块电阻测试范围:0.01?~500M? 电阻率测试范围:10-5??cm~103??cm 样品大小:直径>1cm 精度:<±5% 3.测试设备 四探针 生产厂商: 广州四探针有限公司RTS-2型 基本指标: 间距:1±0.01mm; 针间绝缘电阻: ≥1000MΩ; 机械游移率: ≤0.3%; 探针:碳化钨或高速钢材质,探针直径Ф0.5mm; 探针压力:5~16 牛顿(总力); 使用环境: 温度::23±2℃; 相对湿度:≤65%; 无高频干扰; 无强光直射; 基本参数: Fsp=0.1 探针间距:1.0mm
L-9517-9399-01-D RESA is a one-piece stain l ess steel ring with a single track, true absolute scale marked di r ect l y onto the periphery. Read by Renishaw’s revolutionary new absolute ? ne pitch encoder sys t em, , it has high tol e r a nce to dirt, scratch e s and greasy ? n g erprints that can cause other en c od e r sys t ems to mis c ount.The RESA offers impressive accuracy with resolution to 0.00030 arc second, suiting the most demanding precision applications. The low pro? le RESA, with large internal di a m e t er, is easy to design into most in s tal l a t ions. Equally important, its low mass, low inertia design does not compromise system per f or m ance. RESA is available in a wide range of sizes and line counts, providing compatibility with industry standard controllers. System features ? Compatible with the revolutionary new true absolute encoder, ? Angular resolution to 0.00030 arc second ? System repeatability to 0.0075 arc second ? 36 000 rev/min maximum speed for all resolutions ? Patented taper mount sim p li ? es integration and minimises installation errors ? Large internal diameter for ease of integration ? Available in sizes from ?52 mm to ?550 mm ? Custom sizes also available ? Low mass and low inertia ? Ultra-low inertia versions also available ? Integral set-up LED on readhead for quick set-up and instant ‘health check’ at any time ? 30 μm scale pitch ensures exceptional motion control performance ? Resolutions to 27 bit with FANUC or 32 bit with BiSS RESA absolute angle encoder
实验七四探针法测量材料的电阻率 一、实验目的 (1)熟悉四探针法测量半导体或金属材料电阻率的原理 (2)掌握四探针法测量半导体或金属材料电阻率的方法 二、实验原理 半导体材料是现代高新技术中的重要材料之一,已在微电子器件和光电子器件中得到了广泛应用。半导体材料的电阻率是半导体材料的的一个重要特性,是研究开发与实际生产应用中经常需要测量的物理参数之一,对半导体或金属材料电阻率的测量具有重要的实际意义。 直流四探针法主要用于半导体材料或金属材料等低电阻率的测量。所用的仪器示意图以及与样品的接线图如图1所示。由图1(a)可见,测试过程中四根金属探针与样品表面接触,外侧1和4两根为通电流探针,内侧2和3两根是测电压探针。由恒流源经1和4两根探针输入小电流使样品内部产生压降,同时用高阻抗的静电计、电子毫伏计或数字电压表测出其它两根探针(探针2和探针3)之间的电压V23。 a b 图1 四探针法电阻率测量原理示意图 若一块电阻率为 的均匀半导体样品,其几何尺寸相对探针间距来说可以看
作半无限大。当探针引入的点电流源的电流为I ,由于均匀导体内恒定电场的等位面为球面,则在半径为r 处等位面的面积为22r π,电流密度为 2/2j I r π= (1) 根据电流密度与电导率的关系j E σ=可得 22 22j I I E r r ρ σ πσπ= = = (2) 距离点电荷r 处的电势为 2I V r ρ π= (3) 半导体内各点的电势应为四个探针在该点所形成电势的矢量和。通过数学推导,四探针法测量电阻率的公式可表示为 123 231224133411112( )V V C r r r r I I ρπ-=--+?=? (4) 式中,1 12241334 11112( )C r r r r π-=--+为探针系数,与探针间距有关,单位为cm 。 若四探针在同一直线上,如图1(a)所示,当其探针间距均为S 时,则被测样品的电阻率为 123 2311112()222V V S S S S S I I ρππ-=- -+?=? (5) 此即常见的直流等间距四探针法测电阻率的公式。 有时为了缩小测量区域,以观察不同区域电阻率的变化,即电阻率的不均匀性,四根探针不一定都排成一直线,而可排成正方形或矩形,如图1(b)所示,此时只需改变电阻率计算公式中的探针系数C 即可。 四探针法的优点是探针与半导体样品之间不要求制备接触电极,极大地方便了对样品电阻率的测量。四探针法可测量样品沿径向分布的断面电阻率,从而可以观察电阻率的不均匀性。由于这种方法允许快速、方便、无损地测试任意形状样品的电阻率,适合于实际生产中的大批量样品测试。但由于该方法受到探针间距的限制,很难区别间距小于0.5mm 两点间电阻率的变化。 根据样品在不同电流(I )下的电压值(V 23),还可以计算出所测样品的电阻率。
一、线性光栅尺选型 (1)准确度等级的选择数控机床配置线性光栅尺是了提 高线性坐标轴的定值精度、再复定位精度,所以光栅尺的准确度等级是首先要考虑的,光栅尺准确度等级有±0.01mm、±0.005mm、±0.003mm、±0.02mm。而我们在设计数控机床时根据设计精度要求来选择准确度等级,值得注意的是在选用高精度光栅尺时要考虑光栅尺的热性能,它是机床工作精确度的关键环节,即要求光栅尺的刻线载体的热膨胀系数与机床光栅尺安装基体的热膨胀系数相一致,以克服由于温度引起的热变形。 另外光栅尺最大移动速度可达120m/min,目前可完全满足数控机床设计要求;单个光栅尺最大长度为3040mm,如控制线性坐标轴大于3040mm时可采用光栅尺对接的方式达到所需长度。 (2)测量方式的选择光栅尺的测量方式分增量式光栅尺 和绝对式光栅尺两种,所谓增量式光栅尺就是光栅扫描头通过读出到初始点的相对运动距离而获得位置信息,为了获得绝对位置,这个初始点就要刻到光栅尺的标尺上作为参考标记,所以机床开机时必须回参考点才能进行位置控
制。
而绝对式光栅尺以不同宽度、不同问距的闪现栅线将绝对位置数据以编码形式直接制作到光栅上,在光栅尺通电的同时后续电子设备即可获得位置信息,不需要移动坐标轴找参考点位置,绝对位置值从光栅刻线上直接获得。 绝对式光栅尺比增量式光栅尺成本高20%左右,机床设计师因考虑数控机床的性价比,一般选用增量式光栅尺,既能保证机床运动精度又能降低机床成本。但是绝对式光栅尺开机后不需回参考点的优点是增量式光栅尺无法比拟的,机床在停机或故障断电后开机可直接从中断处执行加工程序,不但缩短非加工时间提高生产效率,而且减小零件废品率。因此在生产节拍要求格或由多台数控机床构成的自动生产线上选用绝对式光栅尺是最为理想的。 (3)输出信号的选择光栅尺的输出信号分电流正弦波信号、电压正弦波信号、TTL矩形波信号和TTL差动矩形波信号四种,虽然光栅尺输出信号的波形不同对数控机床线性坐标轴的定位精度、重复定位精度没有影响,但必须与数控机床系统相匹配,如果输出信号的波形与数控机床系统不匹配,导致机床系统无法处理光栅尺的输出信号,反馈信息、补偿误差对机床线性坐标轴全闭环控制无从谈起。在实践中确有输出信号的波形与数控机床系统不匹配
QR011-02-09-01 (AMP) (光学尺接口) 1 2 3 4
QR011-02-09-0
此表仅供试车异常时量测使用。 注意事项: 原装线已由海德汉公司 所提供非必要时请勿自 行焊接以免发生接触不 良。 工 时 准备工时 1.0H 备 注 作业工时 1.0H 月29日 修 订日期年月日 核 准 审 查 承 办 第一版次数第次 QR011-02-09-01 台中精机厂股份有限公司编号WQU-MV-P4-71B LC-191F绝对式光学尺组立作业标准书页次4/8
轴光学尺读写头连接信号线走线方式与X 轴极限开关电线相同,必须穿越护罩到电气箱光学尺接口JF101。 轴光学尺连接读写头信号线走线方式,经由X 轴底座穿越 护罩到电气箱光学尺接口JF102。 轴光学尺吹气部分使用6mm 风管长度约4.0M 接到立柱后。 轴光学尺吹气部分使用6mm 风管长度约3.5M 接到立柱后。 注意事项:请注意走线方式。 六角板手*1 工准备工时 1.0H 备 QR011-02-09-01 1. 2. 3. 44..
工作说明: 1:风压源由三点组合中间8mm 快速接头输出。 2:.输出的5*8mm 风管经过三通接头1(HDKF0800T0)一边插空气帘幕风管,另一边插另一三通接头2。 3:.由三通接头2一边插气枪风管,另一边插电磁阀(HDSVPU22002)输入端。 4:电磁阀电源线接(L01,L02),机台开机时将风压源送到输出端。 5.由电磁阀输出端接到调压器 (HDAR300003) 过滤器(HDAFD3003BD)8mm 快速接头。 6.:气压由过滤调压器输出一6mm 风管接头(HDKF0603L0),接到一6mm 三通接头(HDKF0600T0) 一边插X 轴光学尺风压,另一边插Y 轴光学尺风压侧。 注意事项: 1.请按照图示装配。 2. 过滤调压器试车时请将风压元调到1.5KG 。 量具 模具工具 1.十字起*1 2.剪刀*1 工 时 准备工时 1.0H 备 注 作业工时 1.0H 日期 93年07月29日 修 订日期 年 月 日 核 准 审 查 承 办 林 焕 森 版次 第一版 次数 第 次 QR011-02-09-01 1 3 2 4 5 6
光栅尺的应用与原理 光栅尺的结构是由有刻有窄的等间距的线纹标尺光栅和读数头组成,读数头是由刻有与标尺光栅光刻密度相同好的指示光栅、光学系统和光路原件等组成。标尺光栅与尺度光栅与一定间距平行放置,并且他们的刻度线相互倾斜一定角度@,标尺光栅固定不动,指示光栅沿着垂直线条纹方向运动,光线照在标尺光栅上放射或者投射在指示光栅并发生光的衍射,产生明暗相间的莫尔条纹,光电探测器检测莫尔条纹的宽度变化并将其转换成电信号输出给控制装置。 莫尔条纹的特点: 1.莫尔条纹的移动与光栅栅距之间的移动关系,光栅移动一个条纹,莫尔条纹正好移动一 个条纹。 2.莫尔条纹的放大作用:B=W/(2SIN2/2)=W/2 主要的元件:发光LED, 标尺光栅,指示光栅,光电探测器。 光栅的选用:选用光栅要综合考虑一下几个要素: 1.考虑被测物理量的性质,要根据呗测量的行程和精度要求选择量程和精度,根据被测量 的最大速度确定光栅尺的最大移动速度以及是否需要基准标记和相位开关传感器,要什么形式的光栅。 2.根据控制器可以控制的信号的类型选择光栅输出类型,还要考虑接口的硬件匹配。 3.根据工作条件确定光栅尺应具备在何种环境下工作的能力 4.根据被测的物体考虑安装方案。考虑到空间,方向等问题。 5.设计电缆的长度 6.价格和服务 7.市场的方便,型号的选择。 光栅的主要技术参数: 分辨率:表征的测量精度,有5.0um ,1.0um ,0.5um ,0.1um 输出波形:方波和正弦波两种。 按控制的形式:数字量和模拟量,要与控制器匹配。 测量周期:没测一次所需的时间 测量长度:可以应许的测量范围 测量方式:绝对值和识字增量坐标 使用温度:5----45度 供电电源:一般为+5+5%,电流大小为120mA 最大移动速度:要大于要求值 最小时钟频率:要保证控制器的频率高于要求值。 安装: 把光栅尺贴在平台的固定部分上。安装要用专用工具,保证光栅的安装合付要求(水平度、垂直度)。 读数头要安装在平台的移动部分上。在安装光栅尺时要先安装光栅尺,然后根据光栅尺安装读数头。保证读头与光栅尺的距离2—3mm,
电机采用绝对编码器时参数的配置 在选择电机型号的时候,注意选择编码器的类型为绝对编码器。MD30240[0]=4 反馈编码器类型 MD34200[0]=0 回参考点模式 3:光栅距离码回零
1:零脉冲,如编码器 0:不回参考点,如绝对编码器 2.第二测量系统采用绝对编码器参数的配置 MD30240[1]=4 反馈编码器类型 MD34200[1]=0 回参考点模式 3.绝对编码器回参考点的步骤: (1)设MD34210=1 (2)将机床切换到JOG-FEF(手动回参考点方式),按一下机床面板上的RESET 键,然后按住轴移动方向键“+”(当MD34010=1时按“+”,若MD34010=0时按“-”),此时机床不移动,并将侧位置设为机床零点,即坐标显示为零并出现回参考点完成的标志,数控系统会自动将偏置写到MD34090中,回完参考点后MD34210变为2,回参考点成功。 机床采用绝对编码器作为测量系统能在断电之后记住机床的坐标,不需要每次上电后回参考点,这就是采用绝对编码器的好处,但是注意同样容量的电机采用绝对编码器时会比采用普通的增量编码器的容量要降10%,这是选用带绝对编码器电机时需要注意的。绝对编码器分为多圈和单圈的,如过用绝对编码器作为直线轴的测量系统的话,必须采用多圈,常用的为4096圈,注意在机床轴的整个行程中,编码器旋转的圈数不能超过4096圈,否则会造成断电后无法记忆机床的坐标。 1.电机采用绝对编码器时参数的配置 在选择电机型号的时候,注意选择编码器的类型为绝对编码器。 MD30240[0]=4 反馈编码器类型 MD34200[0]=0 回参考点模式 2.第二测量系统采用绝对编码器参数的配置 MD30240[1]=4 反馈编码器类型 MD34200[1]=0 回参考点模式 3.绝对编码器回参考点的步骤: (1)设MD34210=1 (2)将机床切换到JOG-FEF(手动回参考点方式),按一下机床面板上的RESET 键,然后按住轴移动方向键“+”(当MD34010=1时按“+”,若MD34010=0时按“-”),此时机床不移动,并将侧位置设为机床零点,即坐标显示为零并出现
南开大学硅光电子学与储能实验室四探针操作手册 Four-Point Probe Operation | 2011
四探针操作说明书 Four-Point Probe Operation 第1章引言................................................错误!未定义书签。 1. 目的..................................................错误!未定义书签。 2. 应用范围..............................................错误!未定义书签。 3. 测试设备..............................................错误!未定义书签。 四探针............................................错误!未定义书签。 数字电压源表......................................错误!未定义书签。第2章原理简述............................................错误!未定义书签。 1. 薄膜(厚度≤4mm)电阻率:...............................错误!未定义书签。 2. 薄膜方块电阻..........................................错误!未定义书签。第3章操作方法............................................错误!未定义书签。 1. 引言..................................................错误!未定义书签。 2. 测试线连接方式........................................错误!未定义书签。 3. KEITHLEY 2400高压源表设置指南........................错误!未定义书签。 4. 探针接触方式..........................................错误!未定义书签。 5. 数据测试指南..........................................错误!未定义书签。第4章注意事项............................................错误!未定义书签。附表 .........................................................错误!未定义书签。
非接触光栅系统安装与使用指南 RGS20-S 、RGS40-S 光栅安装 (End Clamps) Renishaw (雷尼绍) 安装准备 1. 剪裁所需光栅,确保光栅的长度能满足行程的要求。请预留把光栅尺伸延至“起始”标记点。未到达标记点前,一定要避免光栅尺粘贴到表面上。确保光栅尺已粘贴到全行程的表面上。 安装过程中,避免扭曲及用力拖拽光栅尺。 图(1) 图(2) 除去端压块底部两边的胶纸。胶纸的作用是在胶水未稳固时临时固定端压块。 4. 把端压块粘贴到光栅尺的末端。 备注: 必须擦净端压块周边的多余胶水,否则读数头的信号会受影响。 型号端压块(End Clamps)所有型号的光栅上安装,并能多次重复使用。 RGA22G RGA245 RGA245 RGA22G
读数头安装 读数头设定 图(3) 图(3)是一个简单安装支架设计。螺丝(A) ---- 夹紧读数头,设定Pitch 参数螺丝(B) ---- 设定Yaw 参数和偏移螺丝(C) ---- 可设定Roll 参数 安装支架设定 固定读数头的托架,必须有平坦表面,能满足读数头安装上的机械公差。其次必须能调节读数头高度并有足够的稳定性,以预防在读数头工作期间所受到的所有外界影响。为了减少光栅的安装问题,在未使用光栅安装器(Scale Guide)粘贴光栅前,请先把机械托架的Roll 参数和Yaw 参数调节到读数头的误差范围内,可使用clock gauge 或precision square 完成设定。 对于RGH22、RGH26和RGH41,设定读数头的高度,可透过蓝色和或橙色的校准胶片放置于读数头和光栅尺之间,读数头的LED 安装指示灯显示绿色,表示安装正确。 橙色的校准胶片还可以帮助设定读数头相对于光栅尺的偏移和Yaw 参数 。 对于RGH24和RGH25读数头,设定只可透过蓝色校准胶片放置于读数头和光栅尺之间, 读数头的LED 安装指示灯显示绿色,表示安装正确。 读数头高度设定完成后,以缓慢的速度移动读数头,确保读数头的指示灯在光栅尺的整个行程内都保持绿色。RGB25和RGH41提供外置设定信号 (X 或Vx),当LED 指示灯失效时,可提供另一个安装参考。外置设定信号是一个5 V 电源,信号为5 V 表示设定正确,当信号为0 V 时,表示需重新设定。 备注: 安装读数头的螺丝力矩大约在0.5 Nm 至0.7 Nm 之间。光栅尺、读数头的信号窗口和托架表面都必须保持清洁。 RGH22、RGH26和RGH41 设定读数头简介图 外置设定信号 RGH24和RGH25设定读数头简介图 LED 安装指示灯显示强度比例 警报信号:读数头接收信号低于15%
海德汉光栅尺: 分类:海德汉光栅尺分为敞开式和封闭式两类:其中敞开式为高精度型。输出波形为正弦波,主要用于精密仪器的数字化改造。最高分辨率可达0.1μm;封闭式则主要用于普通机床,仪器的数字化改造,输出波形为方波。敞开式传感器由光栅尺和光栅读数头两部分组成。封闭式传感器由光栅尺、光栅读数头及壳体三部分整装部件。海德汉光栅尺按外型分类为小型尺,标准型尺、大型尺三类。海德汉光栅尺型号为GBC2-B30型(小型)、GBC2-B10型(标准型)、GBC2-B20型(大型),大型尺最长可做到3000mm。 特点: 1、最先进可靠的光学测量系统,采用可靠耐用的高精度五轴承系统设计,保证光学机械系统的稳定性,优异的重复定位性和高等级测量精度。 2、传感器采用密封式结构,性能可靠,安装方便。 3、采用特殊的耐油、耐蚀、高弹性及抗老化塑胶防水,防尘优异,使用寿命长。 4、具体高水平的抗干扰能力,稳定可靠。 5、光源采用红外发光二极管,体积小寿命长。 6、采用先进的光栅制作技术,能制作各规格的高精度光栅玻璃尺(最长可做到3000mm)。 应用领域:海德汉光栅尺广泛应用于:数控加工中心,机床,磨床,铣床,自动卸货机,金属板压制和焊接机,机器人和自动化科技,生产过程测量机器,线性产品, 直线马达, 直线导轨定位等领域。 注意事项: (1)海德汉光栅尺传感器与数显表插头座插拔时应关闭电源后进行。 (2)尽可能外加保护罩,并及时清理溅落在尺上的切屑和油液,严格防止任何异物进入光栅尺传感器壳体内部。 (3)定期检查各安装联接螺钉是否松动。 (4)为延长防尘密封条的寿命,可在密封条上均匀涂上一薄层硅油,注意勿溅落在玻璃光栅刻划面上。 (5) 为保证光栅尺传感器使用的可靠性,可每隔一定时间用乙醇混合液(各50%)清洗擦拭光栅尺面及指示光栅面,保持玻璃光栅尺面清洁。 (6) 海德汉光栅尺传感器严禁剧烈震动及摔打,以免破坏光栅尺,如光栅尺断裂,光栅尺传感器即失效了。 (7) 不要自行拆开光栅尺传感器,更不能任意改动主栅尺与副栅尺的相对间距,否则一方面可能破坏光栅尺传感器的精度;另一方面还可能造成主栅尺与副栅尺的相对摩擦,损坏铬层也就损坏了栅线,以而造成光栅尺报废。 (8) 应注意防止油污及水污染光栅尺面,以免破坏光栅尺线条纹分布,引起测量误差。 (9) 海德汉光栅尺传感器应尽量避免在有严重腐蚀作用的环境中工作,以免腐蚀光栅铬层及光栅尺表面,破坏光栅尺质量。
SZT-2A四探针测试仪 使用说明书 一概述 SZT-2A型数字式四探针测试仪是运用四线法测量原理的多用途综合测量装置,配上专用的四探针测试架,即可以测量片状,块状或柱状半导体材料的径向和轴向电阻率,测量扩散层的薄层电阻(亦称方块电阻)。四探针测试架有电动,手动,手持三种可以选配,另外还配有四个夹子的四线输入插头用来作为测量线状或片状电阻的中,低阻阻值。 仪器由主机,测试架等部份组成,测试结果由液晶显示器显示,同时,液晶显示器还显示测量类型(电阻率,方块电阻和电阻)以及探头修正系数, 主机由开关电源,DC/DC变换器,高灵敏度电压测量部份,高稳定度恒流源,和微电脑控制系统组成。由於采用大规模集成电路,所以仪器可靠性高,测量稳定性好。 测试探头采用宝石导向轴套和高硬度钢针,定位准确,游移率小,使用寿命长。 仪器适用於半导体材料厂,半导体器件厂,科研单位,高等院校对半导体材料电阻性能的测试。 本仪器工作条件为: 温度:23℃±3℃ 相对湿度:50%~70%
工作室内应无强磁场干扰,不与高频设备共用电源。 二,技术参数 1,测量范围 电阻率: 10??-105?-cm 方块电阻 10??- 105?/□ 电阻 10-?- 105? 2,可测半导体材尺寸 直径:Ф15-100mm 长(或高)度:≤400mm 3,测量方位 轴向,径向均可 4,数字电压表: (1)量程:20mV,200mV,2V (2)误差:±0.5%读数±2字 (3)输入阻抗:>10?? (4)最大分辨率:10μV (5)点阵液晶显示,过载显示。 5,恒流源: (1)电流输出:共分10μA,100uA,1mA,10mA,100mA五挡可通过按键选择,各挡均为定值不可调节,电阻率探头 修正系和扩散层方块电阻修正系数均由机内CPU运算 后,直接显示修正后的结果。
光栅传感器的工作原理 光栅数字传感器,通常由光源5(聚光镜4)、计量光栅、光电器件3及测量电路等部分组成,如图12.1.2所示。计量光栅由标尺光栅1(主光栅)和指示光栅2组成,因此计量光栅又称光栅副,它决定了整个系统的测量精度。一般主光栅和指示光栅的刻线密度相同,但主光栅要比指示光栅长得多。测量时主光栅与被测对象连在一起,并随其运动,指示光栅固定不动,因此主光栅的有效长度决定了传感器的测量范围。 1.莫尔条纹 将主光栅与标尺光栅重叠放置,两者之间保持很小的间隙,并使两块光栅的刻线之间有一个微小的夹角θ,如图12.1.3所示。当有光源照射时,由于挡光效应(对刻线密度≤50条/mm的光栅)或光的衍射作用(对刻线密度≥100条/mm的光栅),与光栅刻线大致垂直的方向上形成明暗相间的条纹。在两光栅的刻线重合处,光从缝隙透过,形成亮带;在两光栅刻线的错开的地方,形成暗带;这些明暗相间的条纹称为莫尔条纹。 莫尔条纹有如下几个重要特性: (1)莫尔条纹的运动与光栅的运动一一对应 当指示光栅不动,主光栅的刻线与指示光栅刻线之间始终保持夹角θ,而使主光栅沿刻线的垂直方向作相对移动时,莫尔条纹将沿光栅刻线方向移动;光栅反向移动,莫尔条纹也反向移动。主光栅每移动一个栅距W,莫尔条纹也相应移动一个间距S。因此通过测量莫尔条纹的移动,就能测量光栅移动的大小和方向,这要比直接对光栅进行测量容易得多。 (2)莫尔条纹具有位移放大作用 当主光栅沿与刻线垂直方向移动一个栅距W时,莫尔条纹移动一个条纹间距。当两个光栅刻线夹角θ较小时,由式(12.1.1)可知,W一定时,θ愈小,则B愈大,相当于把栅距W放大了1/ θ倍。例如,对50条/mm的光栅,W=0.02mm,若取,则莫尔条纹间距,K=573,相当于将栅距放大了573倍。因此,莫尔条纹的放大倍数相当大,可以实现高灵敏度的位移测量。(3)莫尔条纹具有误差平均效应 莫尔条纹是由光栅的许多刻线共同形成的,对刻线误差具有平均效应,能在很大程度上消除由于刻线误差所引起的局部和短周期误差影响,可以达到比光栅本身刻线精度更高的测量精度。因此,计量光栅特别适合于小位移、高精度位移测量。 (4)莫尔条纹的间距S随光栅刻线夹角θ变化 由于光栅刻线夹角θ可以调节,因此可以根据需要改变θ的大小来调节莫尔条纹的间距,这给实际应用带来了方便。 当两光栅的相对移动方向不变时,改变θ的方向,则莫尔条纹的移动方向改变。 2.光电转换 主光栅和指示光栅的相对位移产生了莫尔条纹,为了测量莫尔条纹的位移,必须通过光电器件(如硅光电池等)将光信号转换成电信号。 在光栅的适当位置放置光电器件,当两光栅作相对移动时,光电器件上的光强随莫尔条纹移动,光强变化为正弦曲线,如图12.1.4所示。在a位置,两个光栅刻线重叠,透过的光强最大,光电器件输出的电信号也最大;在c位置由于光被遮去一半,光强减小;位置d的光被完全遮去而成全黑,光强最小;若光栅继续移动,透射到光电器件上的光强又逐渐增大。光电器件上的光强变化近似于正弦曲线,光栅移动一个栅距W,光强变化一个周期。光电器件的输出电压 通过整形电路,将正弦信号转变成方波脉冲信号,则每经过一个周期输出一个方波脉冲,这样脉冲总数N就与光栅移动的栅距数相对应,因此光栅的位移为
摘要 随着数控机床在机床制造领域的普及,现代机床在加工速度、加工精度和可靠性方面都有了很大的提高。机床用光栅测量元件和数控系统是数控机床的两大核心部件,清楚地了解他们的发展趋势,对机床制造商和最终用户都有非常重要的意义。本文依据对海德汉光栅尺拆解后测绘的尺寸,利用solidworks2009对其进行了实体建模,并对光栅尺加工及安装工艺进行了研究和探讨。同时,本文阐述了光栅尺的概况,分类及工作原理,介绍了典型的海德汉光栅尺及海德汉公司的发展,提出了能提高光栅尺的测量精度的方法。 第1章绪论 1.1引言 在经济危机席卷全球的形式下,中国光栅尺制造商面临产品升级,寻求新发展的重要时期,制造出高性能光栅尺是光栅尺制造商共同的目标。实现该目标与很多因素都相关,本文仅从高性能机床所需的两个关键部件人手,介绍其最新发展供大家参考。结合HEIDENHAIN公司的在测量技术方面的深人研究,着重强调了光栅尺精度和测量技术的最新发展,包括:(1)单场扫描技术;(2) 光栅测量技术;(3)光栅尺位移传感器的概念及工作原理;(4 )光栅尺的加工工艺等。结合HEIDENHAIN数控系统,介绍了适合于高性能数控机床的最新数控技术,包括(1)高速加工;(2)五轴加工;(3)智能化;(4)友好人机界面。 1.2光栅测量系统的发展趋势及水平 光栅数字测量系统是数显机床、数控机床和测量机的重要组成部分,是由光栅传感器和光栅倍频器(插补和数字化电子装置)组成。光栅传感器是作为位移测量元件,光栅倍频器是对光栅信号进行电子细分和数字化处理。光栅编码器是利用刻划在各种各样载体(如玻璃、玻璃陶瓷、固态钢或钢带)上的光栅作为测量标准,并通过光电扫描进行分度,编码器的精度和温度特性可以通过刻划和选择载体来优化。光栅编码器又分为直线编码器(光栅尺)和圆编码器,而圆编码器又分为旋转编码器(作为旋转轴的反馈部件)和角度编码器(作为转台的角度测量部件)。对于编码器的结构又分为开启式的和封闭式的。它是以测量各个坐标的位移来实现对设备的数显和数控,因此测量系统的精度就决定了设备的精度。目前光栅数字测量系统的精度已有微米级、亚微米级和纳米级三个档次。 光栅测量系统的长处是性能稳定、可靠性好、精度高、测量范围大、使用方便、价格适中,和其他测量系统相比有着明显的优势,在当今国际市场上光栅测量系统要占到80%以上。目前光栅测量系统的侧量步距已达
四探针法测电阻率
实验四探针法测电阻率 1.实验目的: 学习用四探针法测量半导体材料的体电阻率和扩散薄层的电阻率及方块电阻。 2.实验内容 ①硅单晶片电阻率的测量:选不同电阻率及不同厚度的大单晶圆片,改变 条件(光照与否),对测量结果进行比较。 ②薄层电阻率的测量:对不同尺寸的单面扩散片和双面扩散片的薄层电阻 率进行测量。改变条件进行测量(与①相同),对结果进行比较。 3.实验原理:
在半导体器件的研制和生产过程中常常要对半导体单晶材料的原始电阻率和经过扩散、外延等工艺处理后的薄层电阻进行测量。测量电阻率的方法很多,有两探针法,四探针法,单探针扩展电阻法,范德堡法等,我们这里介绍的是四探针法。因为这种方法简便可行,适于批量生产,所以目前得到了广泛应用。 所谓四探针法,就是用针间距约1毫米的四根金属探针同时压在被测样品的平整表面上如图1a 所示。利用恒流源给1、4两个探针通以小电流,然后在2、3两个探针上用高输入阻抗的静电计、电位差计、电子毫伏计或数字电压表测量电压,最后根 据理论公式计算出样品的电阻率[1] I V C 23 =ρ 式中,C 为四探针的修正系数,单位为厘米,C 的大小取决于四探针的排列方法和针距,探针的位置和间距确定以后,探针系数C 就是一个常数;V 23为2、3两探针之间的电压,单位为伏特;I 为通过样品的电流,单位为安培。 半导体材料的体电阻率和薄层电阻率的测量结果往往与式样的形状和尺寸密切相关,下面我们分两种情况来进行讨论。 ⑴ 半无限大样品情形 图1给出了四探针法测半无穷大样品电阻率的原理图,图中(a)为四探针测量电阻率的装置;(b)为半无穷大样品上探针电流的分布及等势面图形;(c)和(d)分别为正方形排列及直线排列的四探针图形。因为四探针对半导体表面的接触均为点接触,所以,对图1(b )所示的半无穷大样品,电流I 是以探针尖为圆心呈径向放射状流入体内的。因而电流在体内所形成的等位面为图中虚线所示的半球面。于是,样品电阻率为ρ,半径为r ,间距为dr 的两个半球等位面间的电阻为 dr r dR 2 2πρ = , 它们之间的电位差为 dr r I IdR dV 2 2πρ= =。
光栅尺的选型安装与 调试D E M O
一、线性光栅尺选型 二、 三、(1)准确度等级的选择数控机床配置线性光栅尺是了 提高线性坐标轴的定值精度、再复定位精度,所以光栅尺的准确度等级是首先要考虑的,光栅尺准确度等级有±0.01mm、±0.005mm、±0.003mm、±0.02mm。而我们在设计数控机床时根据设计精度要求来选择准确度等 级,值得注意的是在选用高精度光栅尺时要考虑光栅尺的热性能,它是机床工作精确度的关键环节,即要求光栅尺的刻线载体的热膨胀系数与机床光栅尺安装基体的热膨胀系数相一致,以克服由于温度引起的热变形。四、 五、另外光栅尺最大移动速度可达120m/min,目前可完全 满足数控机床设计要求;单个光栅尺最大长度为 3040mm,如控制线性坐标轴大于3040mm时可采用光栅尺对接的方式达到所需长度。 六、 七、(2)测量方式的选择光栅尺的测量方式分增量式光栅 尺和绝对式光栅尺两种,所谓增量式光栅尺就是光栅扫描头通过读出到初始点的相对运动距离而获得位置信 息,为了获得绝对位置,这个初始点就要刻到光栅尺的标尺上作为参考标记,所以机床开机时必须回参考点才
能进行位置控制。而绝对式光栅尺以不同宽度、不同问距的闪现栅线将绝对位置数据以编码形式直接制作到光栅上,在光栅尺通电的同时后续电子设备即可获得位置信息,不需要移动坐标轴找参考点位置,绝对位置值从光栅刻线上直接获得。 八、 九、绝对式光栅尺比增量式光栅尺成本高20%左右,机床 设计师因考虑数控机床的性价比,一般选用增量式光栅尺,既能保证机床运动精度又能降低机床成本。但是绝对式光栅尺开机后不需回参考点的优点是增量式光栅尺无法比拟的,机床在停机或故障断电后开机可直接从中断处执行加工程序,不但缩短非加工时间提高生产效 率,而且减小零件废品率。因此在生产节拍要求格或由多台数控机床构成的自动生产线上选用绝对式光栅尺是最为理想的。 十、 十一、(3)输出信号的选择光栅尺的输出信号分电流正弦波信号、电压正弦波信号、TTL矩形波信号和TTL差动矩形波信号四种,虽然光栅尺输出信号的波形不同对数控机床线性坐标轴的定位精度、重复定位精度没有影 响,但必须与数控机床系统相匹配,如果输出信号的波形与数控机床系统不匹配,导致机床系统无法处理光栅
多轴加工技术工作室建设内容一览表 重点 设备 设备名称 技术要求 数量 四轴加工中心 1、行程 X = 1035 mm, Y = 560 mm, Z = 510 mm *2、快移速度 25 m/min *3、转速范围 20 – 8,000 rpm 4、交流主机,功率 13/9 kW / 17,43/12,06 hp *5、三维控制系统Siemens 840D SL 带ShopMill 硬件: SINUMERIK 840D SL 功能包括CNC ,HMI ,PLC ,闭环 控制环和通信系统,全部集成在一个NCU (数字数控单元)模 块中。操作,编程和显示软件全部集成在CNC 软件中,运行在 高负荷,多处理器的NCU 模块中。控制面板:带TCU (客户端)。 数控单元:NCU710.3 PN.内存系统:1 GB DRAM, 1MB SRAM. PLC :PLC317-3 DP/PN. PLC 存储器:768 kB. 全新驱动系统Sinamics S120 Combi 提高动态性能和工作效率。 数控系统中包括安全功能 –带安全功能 控制面板: SlimLine SINUMERIK Operate SMART key :用于控制机床和数控系统访问权限的设备。 *显示器: 15" TFT 平板显示器768 x 1024像素的分辨率 键盘:全功能CNC 键盘。预读功能:数控系统提前99个NC 程序段检查方向变化(参数设置)。进给速度根据机床动态特性自动调整。轴数: 3轴直线插补,数字。2轴圆弧插补,螺旋线插补 用户存储器: 9 Mbyte 。程序存储扩展: 2 GB (C/F 存储卡) 操作界面:全新和改进的操作和编程界面SINUMERIK Operate 带ShopMill ,可切换DIN/ISO 。象形软键,图形化刀具显示,精确零点偏移显示。加工循环:钻孔和铣削循环,几何特性计算,带或不带补偿夹套攻丝,铰孔,阵列孔镗孔,槽,矩形和圆弧型腔铣削,测量循环。参数:数学函数: =,+,-,, /, sin α, cos α 编程:逻辑函数: (=,<>,>,>=,<,<=)。括号函数, tan α, arcus sin, arcus cos, tan, an, en, In, log, 数的绝对值,圆周率,取反,取整数,取小数,计算参数,全局用户参数(GUD ), 局部用户参数(LUD )。程序结构化:子程序,程序块重复,条 件跳转到标记位置,程序分组。坐标系统:直角坐标,极坐标。 坐标变换:平移,缩放,镜像,旋转。位置详细信息:所需值/ 实际值,直角坐标系中直线和圆弧待移动距离,绝对尺寸,毫 米或英寸显示和输入单位。轮廓接近和直线,切线或垂直于圆, 离开: 螺旋线 刀具表: 99把刀,刀具表数量由数据存储器容量限制 恒路径速度:相对刀具中心路径、相对切削刃 自由轮廓编程:自由图编程。方便操作:用菜单形式创建和设 置原点。手动操作: 通过将位置转到ShopMill 系统中,方便 3
Installation guide M-9572-0057-02-A
SR, Si encoder system
EMC compliance
Storage and handling (continued)
The encoder system conforms to the relevant harmonised European standards for electromagnetic compatibility as detailed below.
BS EN 61326
Patents N-heptane Acetone Benzene
Features of Renishaw’s encoder systems and similar products are the subjects of the following patents and patent applications: EP 0274491 US 4,974,962 US 5,088,209 JP 248,895,1993 JP 506,211/1999
CH3(CH2)5CH3 CH3COCH3
EP 0207121 JP 2,963,926 EP 0543513 EP 826138 B US 6,588,333 B1
JP 1549396
US 4959542
EP 0274492
US 4926566
EP 0383901
EP 0514081
JP 3,202,316
US 5,241,173
US 5,302,820
EP 0748436
US 5,861,953
US 6,051,971
EP 1147377
JP 2003-515,611
Further patent applications pending.
Further information Propan-2-ol
Further information relating to the installation of the encoder range can be found in the Data sheet (L-9517-9155), Software user guide (M-9572-0058) and the RESM Installation guide (M-9590-0010). These can be downloaded from our website https://www.doczj.com/doc/23655740.html,/encoder and are also available from your local representative. ? Renishaw plc 2004. All rights reserved. Renishaw ? is a registered trademark of Renishaw plc. This document may not be copied or reproduced in whole or in part, or transferred to any other media or language, by any means without the written prior permission of Renishaw. The publication of material within this document does not imply freedom from the patent rights of Renishaw plc.
CH3CHOHCH3
Methylated Spirits
Chlorinated Solvents
Disclaimer
Considerable effort has been made to ensure that the contents of this document are free from inaccuracies and omissions. However, Renishaw makes no warranties with respect to the contents of this document and specifically disclaims any implied warranties. Renishaw reserves the right to make changes to this document and to the product described herein without obligation to notify any person of such changes.
Storage and handling
Readhead +85 °C 0 °C
+70 °C -20 °C System
Interface +70°C 0 °C
Storage <95% RH Operating <80% RH (BS EN 61010-1: 2001) System