EtherCAT网络及其运动控制系统研究
谢香林,李木国
大连理工大学电子信息工程学院,辽宁大连 (116024)
E-mail:xxlzdh204@https://www.doczj.com/doc/1714973772.html,
摘要:随着以太网技术的发展,特别是高速以太网的出现使得以太网进入工业通信领域,各种工业以太网技术也迅速发展和推广。本文介绍了一种高速的工业以太网-EtherCAT,该网络采用标准以太网技术,采用了独立的工业过程数据传输通道,提高了传输的实时性,并具有灵活的拓扑结构,简单的系统配置,高可靠性等特点。文章分析了EtherCAT网络的原理、技术特点及主从站关键技术。在此基础上设计了一种基于EtherCAT网络和DSP的双轴运动控制系统,给出了系统的总体框架及主从站实现的关键细节,最后给出了相应的实验结论。本设计充分发挥了EtherCAT工业以太网络实时数据传输的功能和TMS320F28335 DSP 芯片强大的运算处理能力,实现了运动系统高精度的位置控制。
关键词:EtherCAT;运动控制系统;实时以太网
1. 引言
目前基于以太网技术的现场控制网络被广泛应用于工业现场控制领域。由于传统的以太网不能满足工业控制实时性的要求,因此,如何在传统以太网的基础上加以实时性改进,使之符合工业传输标准是以太网用于工业领域的根本解决方法。德国倍福公司提出的EtherCAT工业以太网技术在数据链路层采用了实时调度的软件核,并采用了过程数据传输的独立通道,提高了系统的实时性;该网络还具有灵活的拓扑结构,简单的系统配置,较低的成本等特点,目前该网络得到了越来越多网络工业设备开发商的关注。把EtherCAT引入到运动控制系统,可以在上位控制器和驱动单元之间通过该网络实时的传递控制数据和状态数据,并且能够借助于该网络提供的分布时钟提供准确的多轴同步功能。本文设计的一套运动控制系统为双轴运动控制系统,实现了伺服电机精确的实时控制。
2. EtherCAT技术介绍
2.1 EtherCAT总体构架
EtherCAT采用主从式结构,主站PC机采用标准的以太网卡,从站采用专用芯片。EtherCAT支持包括线型、总线型和树型在内的几乎所有拓扑结构,整个网络可以连接65535台设备[1]。
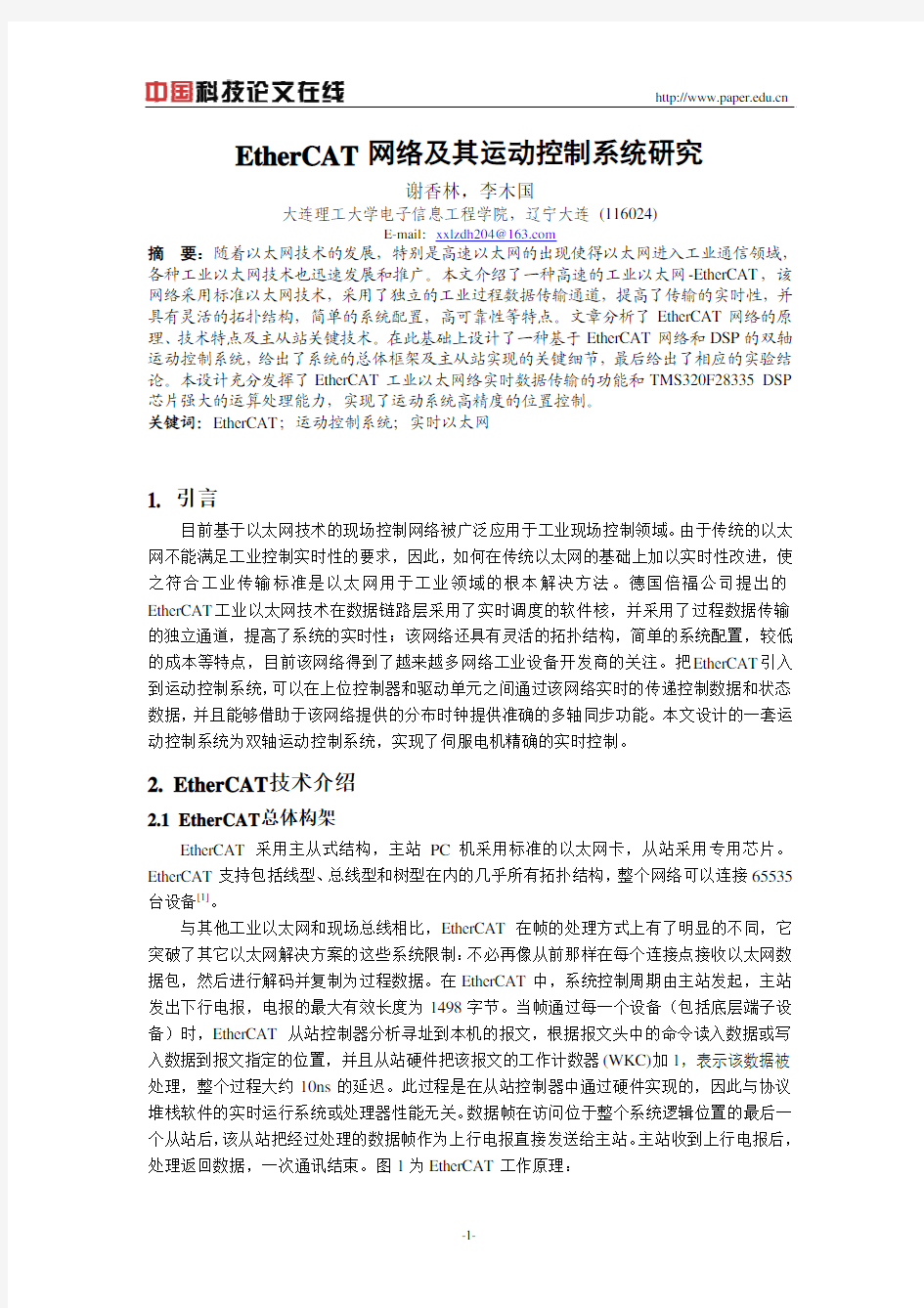
与其他工业以太网和现场总线相比,EtherCAT在帧的处理方式上有了明显的不同,它突破了其它以太网解决方案的这些系统限制:不必再像从前那样在每个连接点接收以太网数据包,然后进行解码并复制为过程数据。在EtherCAT中,系统控制周期由主站发起,主站发出下行电报,电报的最大有效长度为1498字节。当帧通过每一个设备(包括底层端子设备)时,EtherCAT从站控制器分析寻址到本机的报文,根据报文头中的命令读入数据或写入数据到报文指定的位置,并且从站硬件把该报文的工作计数器(WKC)加1,表示该数据被处理,整个过程大约10ns的延迟。此过程是在从站控制器中通过硬件实现的,因此与协议堆栈软件的实时运行系统或处理器性能无关。数据帧在访问位于整个系统逻辑位置的最后一个从站后,该从站把经过处理的数据帧作为上行电报直接发送给主站。主站收到上行电报后,处理返回数据,一次通讯结束。图1为EtherCAT工作原理:
Fig1 Diagram of EtherCA T working principle
2.2 EtherCAT数据帧
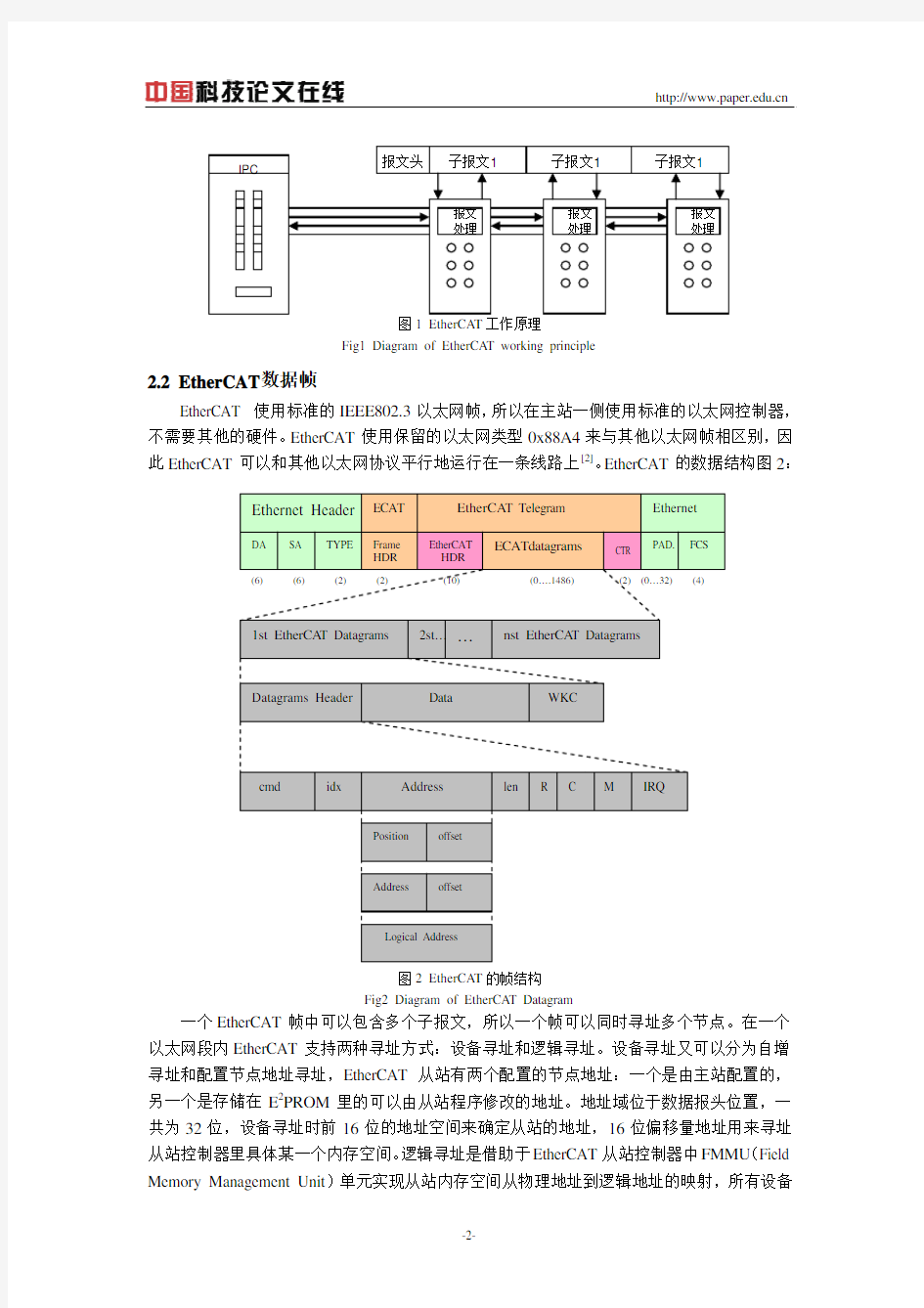
EtherCAT 使用标准的IEEE802.3以太网帧,所以在主站一侧使用标准的以太网控制器,不需要其他的硬件。EtherCAT使用保留的以太网类型0x88A4来与其他以太网帧相区别,因此EtherCAT可以和其他以太网协议平行地运行在一条线路上[2]。EtherCAT的数据结构图2:
图2 EtherCA T的帧结构
Fig2 Diagram of EtherCA T Datagram
一个EtherCAT帧中可以包含多个子报文,所以一个帧可以同时寻址多个节点。在一个以太网段内EtherCAT支持两种寻址方式:设备寻址和逻辑寻址。设备寻址又可以分为自增寻址和配置节点地址寻址,EtherCAT从站有两个配置的节点地址:一个是由主站配置的,另一个是存储在E2PROM里的可以由从站程序修改的地址。地址域位于数据报头位置,一共为32位,设备寻址时前16位的地址空间来确定从站的地址,16位偏移量地址用来寻址从站控制器里具体某一个内存空间。逻辑寻址是借助于EtherCAT从站控制器中FMMU(Field Memory Management Unit)单元实现从站内存空间从物理地址到逻辑地址的映射,所有设备
从4GByte空间中(EtherCAT报文里的32bit地址空间)读数据或者写数据。逻辑寻址方式不是按照从站的位置寻址而是逻辑地址,所以逻辑寻址可以对所有进行逻辑映射的从站进行同时寻址。逻辑寻址支持位映射,在过程数据通讯过程中逻辑寻址可以充分利用带宽降低网络的拥堵。
所有的EtherCAT报文都由16位的WKC结束,WKC用来标识由EtherCAT报文寻址到的设备数量。当报文在从站成功实现数据交换,EtherCAT从站控制器通过硬件增加WKC的值。在主站一侧,主站通过比较返回报文的WKC值和期望的WKC值来校验报文的正确性。
3. EtherCAT实现
3.1 主站实现
EtherCAT在主站方面只需一块标准的NIC网卡,主站功能完全由软件实现。EtherCAT 可以用一个以太网帧发送1486字节的有效数据,所以在通常情况下,每个通讯周期只需要一个或两个帧就能完成所有节点的全部通信。EtherCAT主站程序应该包含以下几个方面:
(1)解析根据配置工具生成的XML文件并且根据其内容配置网络;
(2)管理EtherCAT从站状态:发送配置文件中定义的初始化帧,初始化从站,为通信做准备;
(3)使用邮箱操作实现非周期性数据传输,配置系统参数,处理过程通信中某些偶然性事件;
(4)实现过程数据通信,完成主站与从站之间的实时数据交换,达到主站控制从站运行,并处理从站实时状态的功能。
主站代码结构如图3:
图3 EtherCA T主站程序流程图
Fig3 EtherCA T Master Program Datagram
3.2 从站实现
EtherCAT最多可以连接65535个从站节点,这些从站节点又可以分为简单节点和复杂
节点。简单从站节点即I/O 节点,只需要从站控制器(ESC )自身的I/O 资源就可以实现。复杂从站节点则需要从站应用程序控制器。在复杂节点中,从站控制器完成在EtherCAT 网络中存取数据,并通过PDI 接口和应用程序进行数据的交换;从站控制器完成EtherCAT 应用层的功能及具体的应用程序。图4为复杂从站节点原理结构图:
图4 EtherCA T 从站原理图 Fig4 EtherCA T Slave Node Diagram
从站控制器可以是ASIC 芯片或通过FPGA 实现,它通过三种接口方式(SPI/并行8位/并行16位)与应用程序控制器相连接,具体接口实现方式由配置寄存器决定。从站控制器内部最大有64K 的内存空间,其中前4K (0x0000-0x0FFF )作为寄存器空间,其余的60K 作为数据交换使用。从站控制器在EtherCAT 网络和应用程序控制器之间可以实现两种形式的数据交换:一种是周期性数据,一种是非周期性的数据。周期性数据传输可以采用缓冲区方式,任何一方在任何时间都可以访问此方定义的内存,得到最新的数据;非周期性数据的传输采用握手方式(邮箱方式)实现,一方写入数据到定义的内存,只有完成定义内存的最后一个字节的写入,另一方才能开始从定义内存中读取数据,而且只有在读出定义内存的最后一个字节数据后,才能重新写入数据。通过配置SyncManager 寄存器来分配内存单元实现数据的周期和非周期性传输。
从站应用程序控制器通过中断或查询的方式存取从站控制器里的数据,执行具体的应用程序。同时从站应用程序控制器维护EtherCAT 状态机,实现EtherCAT 主从站之间的状态同步与切换。从站应用程序控制器可以是单片机或DSP 等微控制器实现,通过串行或并行口和从站控制器相连接。
4. EtherCAT 控制系统设计
4.1 系统概述
系统的控制部分是由作为EtherCAT 主站的上位PC 机、作为从站的DSP 控制器以及他们之间的EtherCAT 网络构成;伺服系统选用松下MFDDTB3A2交流伺服驱动器和松下MSMA502PIG 永磁同步电机。其基本结构如图5:
从 站 控 制 器
应 用 程 序 控 制 器
图5 系统结构图 Fig5 System Structure Diagram
在本系统中在主站我们选用具有DMA 传输功能的网卡作为主站侧EtherCAT 接口;在从站侧选用倍福公司的ET1100芯片作为从站控制器,TI 公司的TMS320F28335型号DSP 作为应用程序控制器实现位置控制器功能,两者通过SPI 接口进行数据交换。TMS320F28335作为SPI 接口的主设备,ET1100作为SPI 的从设备。TMS320F28335和ET1100从站控制器构成一个从站节点,完成从网络接收和发送数据然后通过位置控制方式控制位置伺服电机的功能。
4.2 系统实施方案
在本系统中我们定义了自己的数据模块结构,通过应用层程序在网络中传送控制量和状态反馈量。我们定义了两种数据模块,一种是位置控制模块,主要是主站发送的位置控制信号,另一种是反馈模块,主要完成编码器反馈量的传输。其结构如图6:
图6 数据通信报文结构
Fig6 Datagram structure for data transmission
在数据报文结构中,电机号用来区分伺服电机而设置的;控制字部分用来标示位置控制、寻零、清除错误等控制应用;握手位提供了主从站之间可靠的数据传输;指令数据和反馈数据分别是主站发送的给定位置值和从站返回的实际位置值或错误信号。
当数据帧到达从站控制器时,从站控制器硬件自动进行数据交换,把控制数据写入从站控制器DPRAM 中,要发送的状态数据从DPRAM 插入到数据帧中。控制模块数据由DSP 进行解码后得到控制的具体值,进行电机的位置控制。反馈数据经DSP 的QEP 模块采样发送到从站控制器然后插入到数据帧中送到上位机。上述过程在程序的正常运行阶段周期性的执行。
4.3 系统具体实现
在上位机我们主要应用TwinCAT PLC 软件进行程序的编写。PLC 程序主要包括位置数据的生成模块和数据修正模块,在本设计中我们给定两轴的位置曲线为sin 函数曲线,在数据生成时,对sin 曲线按一个时间间隔进行采样(我们设定为20ms ),如周期为2s 的sin 函数可以离散为100个点。在线计算离散点的位置幅值,通过EtherCAT 发送到从站,然后根据反馈回来的实际位置信息进行下一个要发送时间间隔离散点的计算与纠正。TwinCAT 系统管理器作为EtherCAT 主站管理着数据帧的发送与接收,我们通过系统管理器进行PLC 数据变量与数据映像区数据的连接。由系统管理器实现EtherCAT 网络主站功能,PLC 实现具体应用程序。在系统运行前要进行从站初始化,包括从站物理地址、配置运行方式(周期性
握手位 (1bit)
控制字 (1Byte) 指令数据 res (7bit
电机号 (1Byte) 握手位 (1bit)
Res (7bit)
反馈数据 (6Byte )
状态字
电机号 (1Byte)
WKC
反馈数据 电机2
控制数据 电机2
反馈数据 电机1
控制数据 电机1
报文头
通讯、非周期性通讯)、逻辑地址寄存器映射等等。通过主站配置文件进行配置,由主站读取配置文件,构造初始化命令帧进行从站初始化,主站配置文件还包括过程数据循环命令帧的配置。主站配置文件循环发送帧的配置如下:
-
-
-
-
-
-
-
可以看到在一个通讯周期中通过一个数据帧就可以实现控制数据和反馈数据的交换。另外还需在从站描述文件中
在下位机,主要对DSP进行从站应用层程序的设计,主要分为数据的存取和具体的位置控制程序。在本设计中主要为周期性数据传输,我们采用中断的方式进行,DSP上电完成初始化之后,系统进入周期性运行状态,等待EtherCAT帧的到来。当数据帧到达ET1100从站控制器之后,向DSP发出中断,DSP相应中断读取从站控制器中的指令数据,并且把反馈状态数据写入到从站控制器中,完成一次数据的交互。DSP得到上位机指令数据之后,把解码得到的1号电机和2号电机的控制数据分别送到位置控制程序模块中去,控制程序根据位置信息生成相应的位置脉冲信号给伺服驱动器控制伺服电机运转。我们设置SyncManager2为主站到从站控制数据的写缓冲区配置寄存器,反馈数据读缓冲区由SyncManager3来配置。程序流程图如图7:
图7 程序中断流程图
Fig7 Interrupt program diagram
我们对系统进行了精确性测试,令两轴运行正弦曲线相位相差为90°,在某一时刻得到的20个正弦波周期(正弦波周期2s,按 20ms离散)反馈数据所绘得的曲线如图8:
图8 反馈数据曲线图
Fig8 Feedback data diagram
可以看到,系统运行中两个伺服轴运行的平滑性,基本没有发生传输过程中数据的丢失和数据的滞后传输,可得到EtherCAT网络传输的高可靠性。
5.总结
通过对EtherCAT网络的分析及其运动控制系统的设计,可以验证EtherCAT网络在原理上的先进性及其应用中数据传输的快速性与可靠性。由于EtherCAT网络的开放性,其应用产品开发具有很大的潜力,将会在工业控制领域发挥重大作用。
参考文献
[1] Beckhoff GmbH. EtherCA T-the Ethernet fieldbus. EtherCA T Technology Group. 2006.
[2] 国际电工委员会. EtherCA T数据链路层协议. IEC. 2007
[3] EtherCA T技术委员会. EtherCAT从站描述文件. EtherCA T Technology Group. 2007
Research on EtherCAT and it’s Motion Control System
Xie XiangLin, Li MuGuo
School of Electronic and Information Engineering, Dalian University of Technology,
Liaoning, Dalian, (116024)
Abstract
As the development of Ethernet especially the fast Ethernet appear,the Ethernet technology have been brought into the industry communication field, many industry Ethernet technologies are develop and spread rapidly. In this article we introduce a fast industry Ethernet-EtherCAT,which based on standard Ethernet and adopt sepatate transmit channels for industry process data, improving the real-time ability and Having the characteristics of flexible topology、simple configuration and high reliability.. In the article ,we analysis the theory, the characteristics , the master-slave station key technologies of EtherCAT. Based on these techniques we develop a two-axis motion control system based on EtherCAT and DSP,giving the system’s frame and master and slave’s key detail of implementation,at last giving the experiment conclusion. the design exert the real-time ability of EtherCAT and the powerful operation capacity of TMS320F28335 DSP sufficiently. and have achieved high precision position motion control.
Keywords: EtherCAT; Motiorn control system; real-time Ethernet
作者简介:谢香林,男,1983年生,硕士研究生,主要研究方向是网络运动控制。
现场总线控制系统的现状和发展前景 序言 随着计算机技术、通信技术和控制技术的发展,传统的控制领域正经历着一场前所未有的变革,开始向网络化方向发展。计算机控制系统的发展在经历了基地式气动仪表控制系统、电动单元组合式模拟仪表控制系统、集中式数字控制系统以及集散控制系统(DCS)后,今后将朝着现场总线控制系统的方向发展。 现场总线(Fieldbus)是指开放式、国际标准化、数字化、相互交换操作的双向传送、连接智能仪表和控制系统的通信网络。它作为工厂数字通信网络的基础,沟通了生产过程现场及控制设备之间及其与更高控制管理层次之间的联系。它不仅是一个基层网络,而且还是一种开放式、新型全分布控制系统。这是一项以智能传感、控制、计算机、数字通讯等技术为主要内容的综合技术,是信息化带动工业化和工业化推动信息化的适用技术,是能应用于各种计算机控制领域的工业总线,因现场总线潜在着巨大的商机,世界范围内的各大公司都投入相当大的人力、物力、财力来进行开发研究[1]。当今现场总线技术一直是国际上各大公司激烈竞争的领域,由于现场总线技术的不断创新,过程控制系统由第四代的DCS 发展至今的FCS(Fieldbus Control System)系统,已被称为第五代过程控制系统。而FCS和DCS的真正区别在于其现场总线技术。现场总线技术以数字信号取代模拟信号,在3C(Computer计算机、Control控制、Commcenication通信)技术的基础上,大量现场检测与控制信息就地采集、就地处理、就地使用,许多控制功能从控制室移至现场设备。由于国际上各大公司在现场总线技术这一领域的竞争,仍未形成一个统一的标准,目前现场总线网络互联都是遵守OSI参考模型。由于现场总线以计算机、微电子、网络通讯技术为基础,这一技术正在从根本上改变控制系统的理念和方法,将极大地推动整个工业领域的技术进步,对工业自动化系统的影响将是积极和深远的。 现场总线技术是当代工业数字通信的前沿技术,是计算机技术、通信技术和自动化控制技术的集成,也是信息技术、测量技术在信息时代的体现。现场总线技术经过10年的研发、试验和局部应用阶段,现已开始大量地在中小系统中应用,并开始在超大规模的自动化系统工程中应用。现场总线技术是工业数字通信时代的先驱,它的出现正在引起工业控领域的一次前所未有的技术革命。现场总线不仅仅是分散于最底层的控制系统,而且是建立于整个工业体系的通信系统,它的通信协议建立在控制策略之上,标准的编程语言(DDL)和强大的通信功能,使现场总线控制系统成为贯彻操作者意志的最得力的工具,由于其巨大的技术优势,被认为是工业控制发展的必然趋势,将逐步取代传统的控制方法。 进入二十一世纪以来,随着我国国民经济的高速发展,我国现场总线控制系统行业保持了多年高速增长,并随着我国加入WTO, 近年来,现场总线控制系统行业的出口也形势喜人,2008年,全球金融危机爆发,我国现场总线控制系统行业发展也遇到了一些困难,如国内需求下降,出口减少等,现场总线控制系统行业普遍出现了经营不景气和利润下降的局面,2009年,随着我国经济刺激计划出台和全球经济走出低谷,我国现场总线控制系统行业也逐渐从金融危机的打击中恢复,重新进入良性发展轨道。
计算机网络安全综述学生姓名:李嘉伟 学号:11209080279 院系:信息工程学院指导教师姓名:夏峰二零一三年十月
[摘要] 随着计算机网络技术的快速发展,网络安全日益成为人们关注的焦点。本文分析了影响网络安全的主要因素及攻击的主要方式,从管理和技术两方面就加强计算机网络安全提出了针对性的建议。 [关键词] 计算机网络;安全;管理;技术;加密;防火墙 一.引言 计算机网络是一个开放和自由的空间,但公开化的网络平台为非法入侵者提供了可乘之机,黑客和反黑客、破坏和反破坏的斗争愈演愈烈,不仅影响了网络稳定运行和用户的正常使用,造成重大经济损失,而且还可能威胁到国家安全。如何更有效地保护重要的信息数据、提高计算机网络的安全性已经成为影响一个国家的政治、经济、军事和人民生活的重大关键问题。本文通过深入分析网络安全面临的挑战及攻击的主要方式,从管理和技术两方面就加强计算机网络安全提出针对性建议。
二.正文 1.影响网络安全的主要因素[1] 计算机网络安全是指“为数据处理系统建立和采取的技术和管理的安全保护,保护计算机硬件、软件数据不因偶然和恶意的原因而遭到破坏、更改和泄漏”。计算机网络所面临的威胁是多方面的,既包括对网络中信息的威胁,也包括对网络中设备的威胁,但归结起来,主要有三点:一是人为的无意失误。如操作员安全配置不当造成系统存在安全漏洞,用户安全意识不强,口令选择不慎,将自己的帐号随意转借他人或与别人共享等都会给网络安全带来威胁。二是人为的恶意攻击。这也是目前计算机网络所面临的最大威胁,比如敌手的攻击和计算机犯罪都属于这种情况,此类攻击又可以分为两种:一种是主动攻击,它以各种方式有选择地破坏信息的有效性和完整性;另一类是被动攻击,它是在不影响网络正常工作的情况下,进行截获、窃取、破译以获得重要机密信息。这两种攻击均可对计算机网络造成极大的危害,并导致机密数据的泄漏。三是网络软件的漏洞和“后门”。任何一款软件都或多或少存在漏洞,这些缺陷和漏洞恰恰就是黑客进行攻击的首选目标。绝大部分网络入侵事件都是因为安全措施不完善,没有及时补上系统漏洞造成的。此外,软件公司的编程人员为便于维护而设置的软件“后门”也是不容忽视的巨大威胁,一旦“后门”洞开,别人就能随意进入系统,后果不堪设想。
电力拖动自动控制系统复习(14电气工程本) 一.题型 填空(20)、选择(10)、简答(30)、计算(40) 二.各章节内容提要 (一)绪论——基本概念 1.运动控制系统的组成(电动机、功率放大与变换装置、控制器、相应的传感器)【P1】【填空】 2.直流电机的数学模型简单,转矩易于控制。交流电机具有结构简单等优点,但其动态数学模 型具有非线性多变量强耦合的性质。【P3】【填空】 3.转矩控制是运动控制的根本问题,磁链控制与转矩控制同样重要。【P5】【填空】 4.典型的生产机械负载转矩特性主要包含恒转矩负载特性、恒功率负载特性、风机与泵类负载 特性。【P5】【填空】 (二)第2章 1.基本概念 (1)直流调速转速公式、方法。【P7】【填空】 公式:方法:1)调节电枢供电电压U; 2)减弱励磁磁通; 3)改变电枢回路电阻R (2)可控直流电源(G-M系统、V-M系统、PWM变换器)【P9】【填空】 (3)增设平波电抗器来抑制电流脉动,总电感量的计算。【P12】【选择题】 三相桥式 三相半波 单相桥式 (4)失控时间的选择【p15】【选择题】 整流电路形式最大失控时间 单相半波20 10 单相桥式(全波)10 5 三相半波 6.67 3.33 三相桥式 3.33 1.67 ★★★★(5)PWM调速系统的优越性表现【p16】【简答题】 ○1主电路简单,需要的电力电子器件少;
○2开关频率高,电路容易连续,谐波少,电动机损耗及发热都较小; ○3低速性能好,稳速精度高,调速范围宽; ○4若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强; ○5电力电子器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也不大,因而装置效率较高; ○6直流电源采用不控整流时,电网功率因数比相控整流器高 (6)不可逆PWM系统中,γ与ρ的关系。【P17】 γ=ρ (7)泵升电压【P20】【填空题】 对滤波电容充电的结果造成直流侧电压升高 (8)调速系统的稳态性能指标S与D及相互之间的关系。【P21-22】【填空题】 ○1——额定负载时的最高和最低转速 => ○2最低速 => 空载转速 ○3例: ★★★★(9)开环系统与闭环系统比较(4点结论)【P29-30】【简答题】 ○1闭环系统静特性可以比开环系统机械特性硬得多。 ○2闭环系统的静差率要比开环系统小得多。 ○3当要求的静差率一定时,闭环系统可以大大提高调速范围。 ○4要取得上述三项优势,闭环系统必须设置放大器。 ★★★★(10)闭环系统能减少稳态转速降的实质问题是什么?结合图形分析【P31】【简答题】闭环系统能够减少稳态速降的实质在于它的自动调节作用,在于它能随着负载的变化而相应地改变电枢电压,以补偿电枢回路电阻压降。 (11)反馈控制规律(3点)【P31】【简答题】 ○1比例控制的反馈控制系统是被调量有静差的控制系统 ○2反馈控制系统的作用是:抵抗扰动,服从给定 ○3系统的精度依赖于给定和反馈检测的精度
毕业设计开题报告 电子信息工程 基于无线传感网络的数据采集系统设计 1前言 传感器已被广泛应用于军事、工业以及家庭设施中。传统意义上传感器间通常电缆与计算机或显示器相连,有线连接虽然可靠性好但其制造工艺复杂且不易变动。传统有线数据采集系统多采用单点测量,无法给出被监测区域内准确数据,不能满足精确测量的要求。同时对于布线和电源供给困难的区域、人员不能到达的区域(如受到污染、环境恶劣的地区)和一些临时场合(如发生自然灾害时)等传统有线数据采集系统的数据采集变得难以实现[1]。 近年,微电子技术、计算机技术、无线通信和传感器技术的飞速发展和日益成熟,推动了低成本、低功耗无线传感器网络WSN(Wireless Sensor Network)的发展。无线传感器网络的优点在于低成本、结构改变快、操作灵活。无线传感器网络是一种全新的信息获取平台,能够实时监测和采集网络分布区域内的各种检测对象的信息,并将这些信息发送到网关节点,以实现复杂的指定范围内的目标检测与跟踪,具有快速展开、抗毁性强等特点,无线传感器网络的研究具有很广泛的应用前景:军事侦察、环境科学、医疗护理、工业自动化和商业应用等。传感器网络的研究是还有必要的。 2主题 2.1 无线传感器网络的概念 无线传感器网络(简称WSN,wireless sensor networks)是综合了传感器技术、微电子技术、现代网络及无线通信技、,嵌入式计算机技术、分布式信息处理技术等各种先进现代技术,通过各类集成化微型传感器协作能够实时监测、感知和采集各种环境和监测对象的信息,并将采集到的这些信息以无线自组多跳网络方式传输到用户终端的网络技术。WSN能以最低的成本、最大的灵活性连接任何有通讯需求的终端设备,进行数据采集和指令发送,具有一定的移动和动态
读书报告:总线技术 主要内容:计算机架构PCI总线I2C总线现场总线 一、计算机结构 1.冯·诺依曼计算机结构 冯·诺依曼计算机结构是根据冯·诺依曼提出的程序存储原理设计的,是一种将程序指令存储器和数据存储器人台并在一起存储的结构。程序指令存储地址和数据存储地址指向同一个存储器的不同物理位置,因此程序指令和数据的宽度相同。但是,这种指令和数据共享同一总线的结构,使得信息流的传输成为限制计算机性能的翘颈,影响了数据处理速度的提高。冯·诺依曼计算机结构如下图所示,目前很多处理器仍然使用冯·诺依曼结构,如英特尔公司的8086,英特尔公司的其他中央处理器,、ARM的ARM7、MIPS公司的MIPS处理器 2.哈佛计算机结构 为了改变冯·诺依曼计算机结构的取指令与数据的读写要从同一存储空间经由一条总线传输,进而影响计算机的性能这一和不足。人们又提出了哈佛计算机结构,哈佛机构是将程序和数据存储在两个相互独立的存储器中,这样在一个机器周期就允许同时获得指令字(来自程序存储器)和操作数(来自数据存储器),从而提高了执行速度,是数据的吞吐量提高了一倍。又由于程序和数据两个相互独立的存储空间,因此取指和执行能够重叠,中央处理器从程序存储空间读取指令内容,解码之后得到数据地址,再到数据存储空间读取相应的数据,并进行下一步的操作(通常是执行),程序存储空间和数据存储空间分开,采用不同的总线,可以使程序和获据具有不同的总线宽度,从而提供较大的存储器带宽,是数据传输效率更高,尤其提高了数字信和号处理的效率。目前使用哈佛结构的中央处理器和微控制器有很多,如Microchip 公司的FIC系列世片,还有摩托罗拉公司的MC68系列、Zilog公司的Z8系列、ATMEL公司的AVR系列和ARM公司的ARM9、ARM10和ARM11。哈佛结构如下图所示;
运动控制直流部分复习题 一、填空: 1. 调速系统的稳态性能指标主要是指和静差率。 2. 采用V-M系统,当系统处于深调速状态时,功率因数将较。 3. 直流调速系统中,晶闸管触发和整流装置的传递函数可近似成环节, 时间常数称为。 4. 晶闸管-电动机转速、电流双闭环调速系统中,环为内环,环为 外环。 5. 双惯性环节校正成典型Ⅰ型系统,引入的调节器是调节器。 6 直流调速的方法包括改变电枢回路电阻调速、调速和减弱磁通调速。7.闭环调速系统对于_ 的扰动具有抑制作用,而对于_ _的扰动则无能为力。 8.转速、电流双闭环调速系统中,调节_ _的限幅值可以调节系统最大电流;调节_ _的限幅值可以调节UPE的最大输出电压。 9.双极性直流PWM变换器的占空比,当时,输出平均电压为正,要使输出平均电压为负,应使。 二、选择题 1.下列说法正确的是() A 积分调节器的输出决定于输入偏差量的历史过程。 B 比例控制可以使系统在偏差电压为零时保持恒速运行。 C 比例调节器可以实现无静差。 D 采用积分调节器动态相应快。 2.双闭环调速系统中电流调节器具备的作用为() A 对负载变化起抗扰作用。 B 对电网电压波动起及时抗扰作用。 C 输出限幅决定允许的最大电流。 D 使转速跟随转速给定电压变化。 3.双闭环调速系统中转速调节器不具备的作用为() A 对负载变化起抗扰作用。 B 对电网电压波动起及时抗扰作用。 C 输出限幅决定允许的最大电流。 D 使转速跟随给定电压变化。 4.在工程设计中,如果将系统校正成典型Ⅰ型系统的过程,KT值取为()时为无超调。
A B C D 5. 采用工程设计法的双闭环直流调速系统中,电流环设计成典型()型系统,引入的电流调节器为()调节器。 A ⅠPI B ⅡPI C ⅠP D ⅡP 6. G-M直流调速系统中的G指的是哪一种直流电源()。 A 直流发电机; B 静止整流器; C 脉宽调制电源; D 以上情况均可能。 三、分析与简答 1.在调速系统中,为什么在开环系统中晶闸管整流装置的控制电压前面没有加放大器,而在闭环之后要添加放大器? 2. 双闭环调速系统中,电流调节器的作用各是什么? 3.采用双极型PWM变换器的调速系统,当电动机停止时,电枢电流是否等于零,为什么? 4. 假设某转速单闭环调速系统的电源电压突然降低,则该调速系统将如何进行 调节,请结合稳态结构图加以说明。 5. 转速、电流双闭环直流调速系统设计后,ASR限幅对应倍额定电流,但是在空 载额定励磁稳速运行时突加额定转矩负载,转速不能回到给定转速,请分析原因? 6. 在转速、电流双闭环直流调速系统中,两个调节器均采用PI调节器。当系统带 额定负载运行时,转速反馈线突然断线,试分析系统进入稳态后调节器、转速、电枢电流的情况。 7. 写出直流电动机反馈闭环调速系统的临界放大系数表达式,并请说明表达式中各个参数含义。 8. 请写出双闭环调速系统起动过程的三个特点。 9. 请简述H型双极式PWM变换器的缺点。 四、设计题 1、某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下: 直流电动机220V、136A、1460r/min,C e=r,允许过载倍数λ=。 晶闸管装置放大系数40。 电枢回路总电阻Ω。 时间常数T l=,T m=。 电流反馈系数β=A(≈10V/),转速反馈系数α=r(≈10V/n N)。 将电流环校正成典型Ⅰ型系统,取KT=;将转速环校正成典型Ⅱ型系统,取h=5。电流环滤波时间常数;转速环滤波时间常数。 请选择并设计各调节器参数。 2、有一转速、电流双闭环调速系统,已知电动机参数为:P N =,U N =220V, I N=28A,n N=1490 r/min,电枢回路电阻R=Ω,允许电流过载倍数λ=,电 磁时间常数T L=,机电时间常数T m=,主电路采用三相桥式整流电路,触 发整流环节的放大倍数Ks=35,整流电装置内阻R res=Ω,平均失控时间常
现场总线控制系统学习心得 班级:电技131 姓名:杨秋 学号:20XX301030103 六个星期的现场总线控制系统课程已经结束,通过这段时间的学习和老师的耐心讲解,我初步了解到了这门课程的基本内容。 目前,在连续型流程生产工业过程控制中,有三大控制系统,即PLC、DCS和FCS。我们已经在以往的学习中了解到了PLC和DCS这两大系统的基本知识,而FCS就是我们这段时间学习的现场总线控制系统。老师分别从以下几个方面详细地向我们讲解了这门课程。 1现场总线和现场总线控制系统的概念 根据国际电工委员会IEC61158标准的定义,现场总线是指应用在制造过程区域现场装置和控制室内自动控制装置之间的包括数字式、多点、串行通信的数据总线,即工业数据总线。是开放式、数字化、多点通信的底层通信网络。以现场总线为技术核心的工业控制系统,称为现场总线控制系统FCS,它是自20世纪80年代末发展起来的新型网络集成式全分布控制系统。 其中,现场总线系统一般被称为第五代控制系统。第一代控制系统为50年代前的气动信号控制系统PCS,第二代为
4~20mA等电动模拟信号控制系统,第三代为数字计算机集中式控制系统,第四代为70年代中期以来的集散式分布控制系统DCS。 2 现场总线技术现场总线技术将专用的微处理器置入了传统的测量控制仪表,使其各自都具有了多多少少的数字计算和数字通信能力,成为能独立承担某些控制、通信任务的网络节点。它们通过普通双绞线、光纤、同轴电缆等多种途径进行信息传输,这样就能够形成以多个测量控制仪表、计算机等作为节点连接成的网络系统。该网络系统按照规范和公开的通信协议,在位于生产现场的多个微机化自控设备之间,以及现场仪表与用作管理、监控的远程计算机之间,实现数据传输与信息共享,进一步构成了各种适应实际需要的自动控制系统 3 现场总线的分类 老师重点讲述了现场总线的几种类别,典型的现场总线技术包括了基金会现场总线FF,LonWork现场总线,Profibu 现场总线,CAN现场总线以及HART现场总线。其中FF总线尤为重要,按照基金会总线组织的定义,FF总线是一种全数字、串行、双向传输的通信系统,是一种能连接现场各种现场仪表的信号传输系统,其最根本的特点是专门针对工业过程自动化而开发的,在满足要求苛刻的使用环境、本质安全、总线供电等方面都有完善的措施。为此,有人称FF总线为
文献综述 前言 从20世纪40年代起,特别是第二次世界大战以来,自动化随着工业发展和军事技术需要而得到了迅速的发展和广泛的应用。如今,自动控制技术不仅广泛应 用于工业控制中,在军事、农业、航空、航海、核能利用等领域也发挥着重要的 作用。例如,电厂中锅炉的温度或压力能够自动恒定的不变,机械加工中数控 机床按预定程序自动地切削工件,军事上导弹能准确地击中目标,空间技术中人 造卫星能按预定轨道运行并能准确地回收等,都是应用了自动控制技术的结果。 自动控制,是指在没有人直接参与的情况下,利用控制装置对机器设备或生产过程进行控制,使之达到预期的状态或性能要求。 双容水箱液位控制系统就是自动控制技术在液位控制方面的应用。其在化工,能源(电厂)等工业工程控制中得到了广泛应用。 过程控制的发展历程 随着过程控制技术应用范围的扩大和应用层次的深入,以及控制理论与技术的进步和自动化仪表技术的发展,过程控制技术经历了一个由简单到复杂,从低 级到高级并日趋完善的过程。 1过程控制装置的发展 1.1基地式控制阶段(初级阶段) 20世纪50年代,生产过程自动化主要是凭借生产实践经验,局限于一般的控制元件及机电式控制仪表,采用比较笨重的基地式仪表(如自力式温度 控制器、就地式液位控制器等),实现生产设备就地分散的局部自动控制。在设 备与设备之间或同一设备中的不同控制系统之间,没有或很少有联系,其功能往 往限于单回路控制。其过程控制的主要目的是几种热工参数(温度、压力、流量 及液位)的定值控制,以保证产品质量和产量的稳定。 1.2单元组合仪表自动化阶段 20世纪60年代出现了单元组合仪表组成的控制系统,单元组合仪表有电动和气动两大类。所谓单元组合,就是把自动控制系统仪表按功能分成若干 单元,依据实际控制系统结构的需要进行适当的组合。单元组合仪表之间用标准 统一的信号联系,气动仪表(QDZ系列)信号为0.02~0.1MPa气压信号,电动 仪表信号为0~10mA直流电流信号(DDZ-II系列)和4~20mA直流电流信号 (DDZ-III系列)因此单元组合仪表使用方便、灵活。由于电流信号便于远距离 传送,因而实现了集中监控和集中操纵的控制系统,对于提高设备效率和强化生 产过程有所促进,适应了工业生产设备日益大型化于连续化发展的需要。
多线控制和总线控制的区别在火灾报警系统中的 各自作用? 多线控制和总线控制有相应的多线控制盘和总线控制盘。 多线控制也叫直接控制,就是利用多线模块直接放线至控制设备,一般的多线控制点控制的是消防泵、风机等等设备,多线控制模块不算编码点。 总线控制是通过接在回路里面的输入输出模块连接被控设备,主机上面有总线控制点,在软件里面可以设定控制点和相对应的设备,另外总线控制的设备,还可以参与自动联动,写进联动程序。 消防系统的总线制控制与多线制是什么意思 总线制是火灾自动报警系统信号传输线路与消防联动系统合二为一,即在一个回路中既有探测器、手动报警按钮,又有控制消防联动设施动作与接受动作回收信号的控制模块回路。也就是设备是并联在一根总线上的。采用总线制布线方式比较简单。一般情况下,如果消防联动设施数量比较多且集中,采用总线制比较经济合理。 多线制是对消防联动设施的控制是一对一、点对点的控制回路。多线控制是由主机控制室用于手动控制的!通常不受报警系统控制,由人为控制!(利用继电器,接触器完成) 多线控制是一个地址码就用一对线,直接接入中控室或控制器箱,布线量大,不好维修,但是地址故障好查找;总线控制是多点多个地址码公用一对线,每对线(或多对线)可以作为一个回路来接入
主机或控制器,施工方便,控制方便,节省材料,回路中所有点位上线以后出现故障易查找,但如果控制器读不出地址码的时候查故障可就困难了。现在大部分工程设计与产品都是总线制的,多线制已经淘汰。可以参考《电气消防》第二册 现在各厂家报警系统均采用两总线制布线方式,也就是两根线上可并联多个报警设备(烟感、温感、手报等),根据各厂家回路容量的不同可能这两根线所连接设备最大数量也不一样(例如:海湾回路容量242点,其他厂家有96点的,有256点的等)。 多线制是针对于总线制来说的,我们国家消防规范有规定,对于一些重要的设备(如:消火栓泵、喷淋泵、排烟机等)必须用多线制进行控制,也就是每台设备必须有单独的控制线与消防主机相连接,这样即使某个设备的线路出现了故障或被火烧断也不会影响其他设备的使用。 总线制布线方式的优点:布线简单,施工方便,工程造价低。缺点:一旦某处线路有问题可能会影响一段线路(也可能整个回路)上的设备不能正常工作 多线制优点:一处线路有问题不会影响其他设备的正常工作缺点:布线复杂,工程造价高 多线制控制:主要用于控制消防泵、喷淋泵、排烟风机等重要设备的启动和停止。容量:可以控制6路设备的启动和停止。Z1 Z2总线:Z1 Z2总线是一类信号线的集合,是模块间传输信息的公共通
交直流调速系统期末考试(运动控制系统)
一.判断题(正确的打√,错误的打×,答案填在题号的前面) 1. (dui )交 - 直 - 交电压型变频器采用电容滤波,输出交流电压波形是规则矩形波。 2. (错)变频调速效率高,调速范围大,但转速不能平滑调节,是有级调速。 3. (对)有静差调速系统是依靠偏差进行调节的,而无静差调速系统则是依靠偏差对作用时间的积累进行调节的 4. (错)电动机的机械特性愈硬,则静差度愈大,转速的相对稳定性就愈高。 5. (dui )转速负反馈调速系统能够有效抑制一切被包围在负反馈环内的扰动作用。 6. ( dui)SPWM 即正弦脉宽调制波形,是指与正弦波等效的一系列等幅不等宽的矩形脉冲列。 7. (cuo )在一些交流供电的场合,可以采用斩波器来实现交流电动机的调压调速。 8. (错)转速负反馈单闭环无静差调速系统采用比例调节器。 9. (dui ) PWM 型变频器中的逆变器件采用高频、大功率的半控器件。 10. (对)矢量变换控制的实质是利用数学变换把三相交流电动机的定子电流分解成两个分量,一个是用来产生旋转磁动势的励磁电流分量,一个是用来产生电磁转矩的转矩分量。 __________________________________________________
二.填空题 1. 根据公式,交流异步电动机有三种调速方法: ① _调压 __ 调速、②__ 串电阻 __ 调速、③ ___变励 磁磁通 _ 调速。 3. IGBT 全称为 __绝缘栅双极晶闸管__ ,GTO 全称为 _门极可关断晶体管__ , GTR 全称为 _电力晶体管 ______________ 。 4. 异步电动机的变频调速装置,其功能是将电网的恒压恒频交流电变换成变压变频的交流电,对交流电动机供电,实现交流无级调速。 三、选择题 1、变频调速中的变频电源是(C )之间的接口。 (A)市电电源(B)交流电机(C)市电电源与交流电机 (D)市电电源与交流电源 2、调速系统的调速范围和静差率这两个指标( B )。(A)互不相关(B)相互制约(C)相互补充(D)相互平等 3、电压型逆变器的直流端( D )。 (A)串联大感器(B)串联大电容 __________________________________________________
现场总线控制系统Newly compiled on November 23, 2020
南阳理工学院自动控制仪表课程报告 学院(系):机械与汽车工程学院 专业:测控技术与仪器(升)学生: *** 指导教师: * * 完成日期2015年 12 月
自动控制仪表课程报告 现场总线控制系统 Fieldbus control system 总计:自动控制仪表课程报告 20 页 插图: 14 幅
自动控制仪表课程报告 现场总线控制系统 Fieldbus control system 学院(系):机械与汽车工程学院 专业:测控技术与仪器(升) 学生姓名: *** 学号:1%%%%%%% 指导教师(职称):(高级工程师) 评阅教师: 完成日期: 2015年12月 南阳理工学院 Nan yang Institute of Technology
现场总线控制系统 测控技术与仪器(升) *** [摘要]技术自推广以来,已经在世界范围内应用于工业控制的各个领域。现场总线的技术推广有了三、四年的时间,已经或正在应用于冶金、汽车制造、烟草机械、环境保护、石油化工、电力能源、纺织机械等各个行业。应用的总线协议主要包括、、Foundation、、Interbus_S 等。在汽车行业,现场总线控制技术应用的非常普遍,近两年国内新的和旧的生产线的改造,大部分都采用了现场总线的控制技术。国外设计的现场总线控制系统已应用很广泛,从单机设备到整个生产线的输送系统,全部采用现场总线的控制方法。而国内的应用仍大多集中中生产线的输送系统、随着技术的不断发展和观念的更新必然会逐步扩展其应用领域。 [关键词] 现场总线;工业控制;应用广泛 Fieldbus control system Measurement & Control Technology and Instruments Major(l) *** Abstract:Field bus technology, since the promotion has been all over the world should be used in industrial control fields. Fieldbus technology popularization has three or four years, has been or are being used in metallurgy, automobile manufacturing, tobacco machinery, environmental protection, petrochemical, electric power, textile machinery and other industries. Application of bus protocol mainly includes the PROFIBUS, DeviceNet, Foundation, Fieldbus, Interbus_S, etc. In the automotive industry, the field bus control technology application is very common, in the past two years the domestic new and the old production line of auto production line transformation, mostly using the field bus control technology. Design of field bus control system has been applied abroad is very broad, from the single device to the transmission system of the whole production line, adopts the control method of the field bus. And domestic applications are mostly concentrated in the production line of
电力传动控制系统——运动控制系统 (习题解答) 第1章电力传动控制系统的基本结构与组成 (1) 第2章电力传动系统的模型 (13) 第3章直流传动控制系统 (18) 第4章交流传动控制系统 (30) 第5章电力传动控制系统的分析与设计* (38)
第1章电力传动控制系统的基本结构与组成 1. 根据电力传动控制系统的基本结构,简述电力传动控制系统的基本原理和共性问题。 答:电力传动是以电动机作为原动机拖动生产机械运动的一种传动方式,由于电力传输和变换的便利,使电力传动成为现代生产机械的主要动力装置。电力传动控制系统的基本结构如图1-1所示,一般由电源、变流器、电动机、控制器、传感器和生产机械(负载)组成。 图1-1 电力传动控制系统的基本结构 电力传动控制系统的基本工作原理是,根据输入的控制指令(比如:速度或位置指令),与传感器采集的系统检测信号(速度、位置、电流和电压等),经过一定的处理给出相应的反馈控制信号,控制器按一定的控制算法或策略输出相应的控制信号,控制变流器改变输入到电动机的电源电压、频率等,使电动机改变转速或位置,再由电动机驱动生产机械按照相应的控制要求运动,故又称为运动控制系统。 虽然电力传动控制系统种类繁多,但根据图1-1所示的系统基本结构,可以归纳出研发或应用电力传动控制系统所需解决的共性问题: 1)电动机的选择。电力传动系统能否经济可靠地运行,正确选择驱动生产机械运动的电动机至关重要。应根据生产工艺和设备对驱动的要求,选择合适的电动机的种类及额定参数、绝缘等级等,然后通过分析电动机的发热和冷却、工作制、过载能力等进行电动机容量的校验。 2)变流技术研究。电动机的控制是通过改变其供电电源来实现的,如直流电动机的正反转控制需要改变其电枢电压或励磁电压的方向,而调速需要改变电枢电压或励磁电流的大小;交流电动机的调速需要改变其电源的电压和频率等,因此,变流技术是实现电力传动系统的核心技术之一。 3)系统的状态检测方法。状态检测是构成系统反馈的关键,根据反馈控制原理,需要实时检测电力传动控制系统的各种状态,如电压、电流、频率、相位、磁链、转矩、转速或位置等。因此,研究系统状态检测和观测方法是提高其控制
https://www.doczj.com/doc/1714973772.html, 自动化控制系统论文参考文献 一、自动化控制系统论文期刊参考文献 [1].基于主动频率跟踪控制的发电机多点自动顺序同期方法. 《电力系统自动化》.被中信所《中国科技期刊引证报告》收录ISTIC.被EI收 录EI.被北京大学《中文核心期刊要目总览》收录PKU.2015年2期.张辉.胡钋. [2].浅析电气自动化控制系统的应用及发展趋势. 《民营科技》.2011年1期.李修伟.陈广文. [3].PLC的PID控制器在MPS自动化控制系统中的应用. 《液压与气动》.被中信所《中国科技期刊引证报告》收录ISTIC.被北京大学《中文核心期刊要目总览》收录PKU.2012年12期.王京.龚秋兰. [4].渠道自动化控制系统及其运行设计. 《水科学进展》.被中信所《中国科技期刊引证报告》收录ISTIC.被EI收录EI.被北京大学《中文核心期刊要目总览》收录PKU.2008年5期.吴保生.尚毅梓. 崔兴华.陈植元. [5].探析自动化控制系统的抗干扰设计. 《制造业自动化》.被中信所《中国科技期刊引证报告》收录ISTIC.被北京大 学《中文核心期刊要目总览》收录PKU.2012年4期.陶权. [6].基于PLC的自动化控制系统的配置及组态分析. 《制造业自动化》.被中信所《中国科技期刊引证报告》收录ISTIC.被北京大 学《中文核心期刊要目总览》收录PKU.2011年6期.何富其. [7].OPC在啤酒自动化控制系统中的应用. 《仪器仪表学报》.被中信所《中国科技期刊引证报告》收录ISTIC.被EI收录EI.被北京大学《中文核心期刊要目总览》收录PKU.2004年z3期.林晟.张光新. [8].海上油田注聚自动化控制系统设计与应用. 《中国海上油气》.被中信所《中国科技期刊引证报告》收录ISTIC.被北京大 学《中文核心期刊要目总览》收录PKU.2010年5期.邹万勤.谢祥恩.刘敏.张君.续伟.王瑶. [9].综采自动化控制系统在新元煤矿的应用. 《中国煤炭》.被北京大学《中文核心期刊要目总览》收录PKU.2014年9期.何勇华.
现场总线技术综述
2008-3-3 15:51:00 来源:中国自动化网
现场总线控制系统技术是 20 世纪 80 年代中期在国际上发展起来的一种崭新的 工业控制技术。现场总线控制系统(FCS)的出现引起了传统的 PLC 和 DCS 控制系 统基本结构的革命性变化。 现场总线系统技术极大地简化了传统控制系统繁琐且技术 含量较低的布线工作量,使其系统检测和控制单元的分布更趋合理。更重要的是从原 来的面向设备选择控制和通信设备转变成为基于网络选择设备。 尤其是 20 世纪 90 年 代现场总线控制系统技术逐渐进入中国以来,结合 Internet 和 Intranet 的迅猛发展, 现场总线控制系统技术越来越显示出其传统控制系统无可替代的优越性。 现场总线控 制系统技术已成为工业控制领域中的一个热点。
1 现场总线的发展
计算机控制系统的早期,采用一台小型机控制几十条控制回路,目的是降低每条 回路的成本。但由于计算机的故障将导致所有控制回路失效,所以后来发展成分布式 控制(DCS),即由多台微机进行数据采集和控制,微机间用局域网(LAN)连接起 来成为一个统一系统。DCS 沿用了二十多年,其优点和缺点均充分显露。最主要的 问题仍然是可靠性:一台微机坏了,该微机管辖下的所有功能都失效;一块 AD 板上 的模/数转换器坏了,该板上的所有通道(8 或 16 个)全部失效。曾有过采用双机双 I/O 等冗余设计,但这又增加了成本,增加了系统的复杂性。为了克服系统可靠性、 成本和复杂性之间的矛盾,更为了适应广大用户要求的系统开放性、互操作性要求, 实现控制系统的网络化,一种新型控制技术──现场总线控制系统(FCS)正迅速发 展起来。 1.1 什么是现场总线 从名词定义来讲,现场总线是用于现场电器、现场仪表及现场设备与控制室主机 系统之间的一种开放的、全数字化、双向、多站的通信系统。而现场总线标准规定某 个控制系统中一定数量的现场设备之间如何交换数据。 数据的传输介质可以是电线电 缆、光缆、电话线、无线电等等。 通俗地讲,现场总线是用在现场的总线技术。传统控制系统的接线方式是一种并 联接线方式,从 PLC 控制各个电器元件,对应每一个元件有一个 I/O 口,两者之间需 用两根线进行连接,作为控制和/或电源。当 PLC 所控制的电器元件数量达到数十个 甚至数百个时, 整个系统的接线就显得十分复杂, 容易搞错, 施工和维护都十分不便。 为此,人们考虑怎样把那么多的导线合并到一起,用一根导线来连接所有设备,所有 的数据和信号都在这根线上流通,同时设备之间的控制和通信可任意设置。因而这根 线自然而然地称为了总线,就如计算机内部的总线概念一样。由于控制对象都在工矿 现场, 不同于计算机通常用于室内, 所以这种总线被称为现场的总线, 简称现场总线。
智能家居的安防控制系统设计文献综述 摘要:随着我国经济的快速发展,生活水平的不断提高,人们对居家的概念已从最初满足简单的居住功能发展到注重对住宅的人性化需求。安全、舒适、快捷、方便的智能小区,已成为住宅发展的主流趋势,其中,安全性是首要目标。智能小区安全性的实现,除了人为的因素外,主要依靠小区的智能化安全防范系统。 关键词:智能小区/住宅/安防系统 为了完成本次毕业设计,我通过学校图书馆和网络资源查阅了大量的有关智能家居的安防控制系统设计方面的中外文献,这些文献为我本次毕业设计提供了很多帮助,以下这些文献就是我在本次毕业论文书写过程中所用到的参考文献,现将其列举如下: 文献[1]以保障安全为目的而建立起来的技术防范系统,称为安全防范系统。它包括以现代物理和电子技术及时发现侵入破坏行为、产生声光报警阻吓罪犯、实录事发现场图像和声音提供破案凭证,以及提醒值班人员采取适当的物理防范措施的各种设备。智能小区安全防范系统的设置应遵循以下原则: 应根据智能小区内保护对象的风险等级,确定相应的防护级别,满足小区全面防护和局部纵深防护的设计要求,以达到所要求的安全防范水平。 应根据智能小区的建设标准、使用功能及安全防范管理的需要,综合运用电子信息技术、计算机网络技术、传感检测技术、安全防范技术等,形成先进、可靠、经济、适用的安全防范技术体系。 文献[2]智能小区安全防范系统的系统设计及其各子系统的配置,须遵照国家相关安全防范技术规程及智能化居住小区的规范、标准,并坚持以人为本的原则。系统的集成应以结构化、模块化、规范化的方式来实现,应能适应工程建设发展和技术发展的需要。 文献[3]智能小区一般通过在小区周界、重点部位与住户室内安装安全防范装置,并由小区物业管理中心统一管理,来提高小区的安全防范水平。小区的智能化安全防范系统,主要由下列子系统构成。 住户室内安装家庭防盗或紧急求助报警装置,与小区物业管理中心计算机系统联
考试题型及分数分配 1 判断题(20分,10~20小题)范围广, 2 选择题(20分,10~20小题)内容深,细节区分 3 填空题(10分,10小题) 4 设计题(10分,2小题) 5 简述题(10分,2小题) 6 无传感器算法:磁链、转矩的计算算法 异步电动机转子磁链和定子磁链的估算、转矩的估算 7 分析计算题(20分,3小题) 直流调速系统 一判断题 1弱磁控制时电动机的电磁转矩属于恒功率性质只能拖动恒功率负载而不能拖动恒转矩负载。(Ⅹ) 2采用光电式旋转编码器的数字测速方法中,M法适用于测高速,T法适用于测低速。(√) 3只有一组桥式晶闸管变流器供电的直流电动机调速系统在位能式负载下能实现制动。(√) 4直流电动机变压调速和降磁调速都可做到无级调速。(√) 5静差率和机械特性硬度是一回事。(Ⅹ) 6带电流截止负反馈的转速闭环系统不是单闭环系统。(Ⅹ) 的大小并非仅取决于速度7电流—转速双闭环无静差可逆调速系统稳态时控制电压U k *的大小。(√) 定 U g 8双闭环调速系统在起动过程中,速度调节器总是处于饱和状态。(Ⅹ) 9逻辑无环流可逆调速系统任何时候都不会出现两组晶闸管同时封锁的情况。(Ⅹ) 10可逆脉宽调速系统中电动机的转动方向(正或反)由驱动脉冲的宽窄决定。(√)11双闭环可逆系统中,电流调节器的作用之一是对负载扰动起抗扰作用。(Ⅹ) 与开环系统相比,单闭环调速系统的稳态速降减小了。(Ⅹ) 12α=β配合工作制的可逆调速系统的制动过程分为本组逆变和它组制动两阶段(√)13转速电流双闭环速度控制系统中转速调节为PID调节器时转速总有超调。(Ⅹ) 14 电压闭环相当于电流变化率闭环。(√) 15 闭环系统可以改造控制对象。(√) 16闭环系统电动机转速与负载电流(或转矩)的稳态关系,即静特性,它在形
136.现代运动控制系统及其应用 内容来源网络,由深圳机械展收集整理! 运动是以为控制对象,以控制器为核心,以电力电子、功率变换装置为执行机构,在控制理论指导下组成的电气传动控制系统。运动控制系统多种多样,但从基本结构上看,一个典型的现代运动控制系统的硬件主要由上位计算机、运动控制器、功率驱动装置、电动机和反馈检测装置和被控对象等几部分组成,如图1所示。电动机及其功率驱动装置作为执行器主要为被控对象提供动力,特别设计应用于伺服系统的电机称之为伺服电机,通常内含位置反馈装置,如光电编码器。目前主要应用于工业界的伺服电机包括电机、永磁交流伺服电机与感应交流伺服电机,其中以永磁交流伺服电机占大多数。 运动控制器是以中央逻辑控制单元为核心、以传感器为信号敏感元件、以电机或动力装置和执行单元为控制对象的一种控制装置。其功能在于提供整个伺服系统的闭路控制,如位置控制、速度控制和转矩控制等。 运动控制器的分类 目前市场上的运动控制器根据不同的方法有不同的分类。 按被控对象分类: 根据应用场合被控对象的不同可分为步进电机运动控制器、伺服电机运动控制器和既可以对步进电机进行控制又可以对交流伺服电机进行控制的运动控制器。 按结构进行分类: 基于计算机标准的运动控制器 基于总线的运动控制器是利用计算机硬件和操作系统,并结合用户开发的运动控制应用
程序来实现的,具有高速的数据处理能力。总线形式上主要有isa接口、pci接口、vme接口、和usb接口等。这种运动控制器大都采用或微机芯片作为cpu,可完成运动规划、高速实时插补、伺服滤波控制和伺服驱动、外部i/o之间的标准化通用接口功能,同时随控制器还提供功能强大的运动控制软件库:c语言运动函数库、windows dll动态链接库等,可供用户根据不同的需求,在dos或windows等平台下自行开发应用软件,组成各种控制系统。 例如美国deltatau公司的pmac多轴运动控制器,采用motorola公司的高性能dsp5600x作为cpu,可以最多同时控制8根轴,与各种类型的主机、放大器、电机和传感器一起完成各种功能。英国阿沃德公司的trio运动控制卡、固高科技(深圳)有限公司的gt 系列运动控制器产品和美国ni公司的ni系列运动控制器等都是这类产品。 从用户使用的角度来看,这些基于的运动控制器之间的差异主要是硬件接口(输入/输出信号的种类、性能)和软件接口(运动控制函数库的功能函数)。 soft型开放式运动控制器 基于soft型开放式运动控制器[3>提供给用户很大的灵活性,它的运动控制软件全部装在计算机中,而硬件部分仅是计算机与伺服驱动和外部i/o之间的标准化通用接口,如同计算机中可以安装各种品牌的声卡、cdrom和相应的驱动程序一样。用户可以在windows 平台和其他操作系统的支持下,利用开放的运动控制内核,开发所需的控制功能,构成各种类型的高性能运动控制系统,从而提供给用户更多的选择和灵活性。 这种控制器的典型产品有美国mdsi公司的open cnc、德国pa(power automation)公司的pa8000nt,美国soft servo公司的基于网络的运动控制器和国内的固高科技有限公司的go系列运动控制器产品等。soft型开放式运动控制的特点是开发、制造成本相对较低,能够给予系统集成商和开发商更加个性化的开发平台。此类产品的价格国内产品普遍要低于国外产品,但在技术性能上也存在一定差距。