第三章 平面问题的有限元法作业 1. 图示一个等腰三角形单元及其节点编码情况,设μ=0,单元厚度为t 。求 1)形函数矩阵[]N ;2)应变矩阵[]B ;3)应力矩阵[]S 。 4 第1题图 第2题图 2. 如题图所示,结构为边长等于a 的正方形,已知其节点位移分别为:11(,)u v 、 22(,)u v 、33(,)u v 、44(,)u v 。试求A 、B 、C 三点的位移。其中A 为正方形形心,B 为三角形形心。 3.直角边边长为l 的三角形单元,如题图所示。试计算单元等效节点载荷列阵(单元厚度为t ,不计自重)。 第3题图 第4题图 4. 如题图所示,各单元均为直角边边长等于l 的直角三角形。试计算(1)单元等效节点载荷列阵;(2)整体等效节点载荷列阵。已知单元厚度为t ,不计自重。
5.下列3个有限元模型网格,哪种节点编号更合理?为什么? 9 34 6 7912 11 34 6 12142 (a) (b) (c) 第5题图 6.将图示结构画出有限元模型;标出单元号和节点号;给出位移边界条件;并计算半带宽(结构厚度为t )。 2a (a) (b) 无限长圆筒 (c) 第6题图 7. 结构如图所示,已知结构材料常数E 和 ,单元厚度为t 。利用结构的对称性,采用一个单元,分别计算节点位移和单元应力。 第7题图
答案: 1. 1)形函数 i x N a = , j y N a = , 1m x y N a a =-- 2)应变矩阵 []1000101 000101011011B a -????=-??--???? 3)应力矩阵 []100010100 01 0111 110022 2 2S a ? ???-? ?=-????- -? ?? ? 2. A 点的位移为 ()2312A u u u = + , ()231 2A v v v =+ B 点的位移为 ()24313B u u u u = ++ , ()2431 3B v v v v =++ C 点的位移为 ()1223C a u u u = + , ()C 1223 a v v v =+ 3. 单元等效节点载荷列阵为 {}11 11 00003 663 T e i j i j R q q q q ?? =++?? ?? 4. (2)整体等效节点载荷向量为 {}111100006 322T R qlt P qlt P P qlt qlt ?? =-???? 7. (1) 减缩后的整体刚度方程 22 12 2 1222 22221110222021102(1)2 2102x x b b ab R b ab b P v Et ab a b ab ab R v b a μμμ μμμμμμ---??- - ??????????--?????? -??? ?=????---+ +? ???? ?????????-????+?? ? ? 节点位移
3 弹性力学平面问题的有限元法 本章包括以下的内容: 3.1弹性力学平面问题的基本方程 3.2单元位移函数 3.3单元载荷移置 3.4单元刚度矩阵 3.5单元刚度矩阵的性质与物理意义 3.6整体分析 3.7约束条件的处理 3.8整体刚度矩阵的特点与存储方法 3.9方程组解法 3.1弹性力学平面问题的基本方程 弹性力学是研究弹性体在约束和外载荷作用下应力和变形分布规律的一门学科。在弹性力学中针对微小的单元体建立基本方程,把复杂形状弹性体的受力和变形分析问题归结为偏微分方程组的边值问题。弹性力学的基本方程包括平衡方程、几何方程、物理方程。 弹性力学的基本假定如下: 1)完全弹性,2)连续,3)均匀,4)各向同性,5)小变形。 3.1.1基本变量 弹性力学中的基本变量为体力、面力、应力、位移、应变,各自的定义如下。 体力 体力是分布在物体体积内的力,例如重力和惯性力。 面力 面力是分布在物体表面上的力,例如接触压力、流体压力。 应力 物体受到约束和外力作用,其内部将产生内力。物体内某一点的内力就是应力。 图3.1
如图3.1假想用通过物体内任意一点p 的一个截面mn 将物理分为Ⅰ、Ⅱ两部分。将部分Ⅱ撇开,根据力的平衡原则,部分Ⅱ将在截面mn 上作用一定的内力。在mn 截面上取包含p 点的微小面积A ?,作用于A ?面积上的内力为Q ?。 令A ?无限减小而趋于p 点时,Q ?的极限S 就是物体在p 点的应力。 S A Q A =??→?0lim 应力S 在其作用截面上的法向分量称为正应力,用σ表示;在作用截面上的切向分量称为剪应力,用τ表示。 显然,点p 在不同截面上的应力是不同的。为分析点p 的应力状态,即通过p 点的各个截面上的应力的大小和方向,在p 点取出的一个平行六面体,六面体的各楞边平行于坐标轴。 图3.2 将每个上的应力分解为一个正应力和两个剪应力,分别与三个坐标轴平行。用六面体表面的应力分量来表示p 点的应力状态。应力分量的下标约定如下: 第一个下标表示应力的作用面,第二个下标表示应力的作用方向。 xy τ,第一个下标x 表示剪应力作用在垂直于X 轴的面上,第二个下标y 表示剪应力指 向Y 轴方向。 正应力由于作用表面与作用方向垂直,用一个下标。x σ表示正应力作用于垂直于X 轴的面上,指向X 轴方向。 应力分量的方向定义如下: 如果某截面上的外法线是沿坐标轴的正方向,这个截面上的应力分量以沿坐标轴正方向为正; 如果某截面上的外法线是沿坐标轴的负方向,这个截面上的应力分量以沿坐标轴负方向为正。 剪应力互等:xz zx zy yz yx xy ττττττ===,, 物体内任意一点的应力状态可以用六个独立的应力分量x σ、y σ、z σ、xy τ、yz τ、zx τ
第2章 弹性力学平面问题有限单元法 2.1 三角形单元(triangular Element) 三角形单元是有限元分析中的常见单元形式之一,它的优点是: ①对边界形状的适应性较好,②单刚形式及其推导比较简单,故首先介绍之。 一、结点位移和结点力列阵 设右图为从某一结构中取出的一典型三角形单元。 在平面应力问题中,单元的每个结点上有沿x 、y 两个方向的力和位移,单元的结点位移列阵规定为: 相应结点力列阵为: (式2-1-1) 二、单元位移函数和形状函数 前已述及,有限单元法是一种近似方法,在单元分析中,首先要求假定(构 造)一组在单元内有定义的位移函数作为近似计算的基础。即以结点位移为已知量,假定一个能表示单元内部(包括边界)任意点位移变化规律的函数。 构造位移函数的方法是:以结点(i,j,m)为定点。以位移(u i ,v i ,…u m v m )为定点上的函数值,利用普通的函数插值法构造出一个单元位移函数。 在平面应力问题中,有u,v 两个方向的位移,若假定单元位移函数是线性的,则可表示成: (,)123 u u x y x y ααα==++ 546(,)v v x y x y ααα==++ (2-1-2)a 式中的6个待定常数α1 ,…, α6 可由已知的6个结点位移分量(3个结点的坐标) {}??? ?? ?????=????? ???? ?????????????=m j i m e d d d d m j j i v u v u v u i {} i i j j m X Y X (2-1-1)Y X Y i e j m m F F F F ?? ?? ???? ???? ??==??????????????????
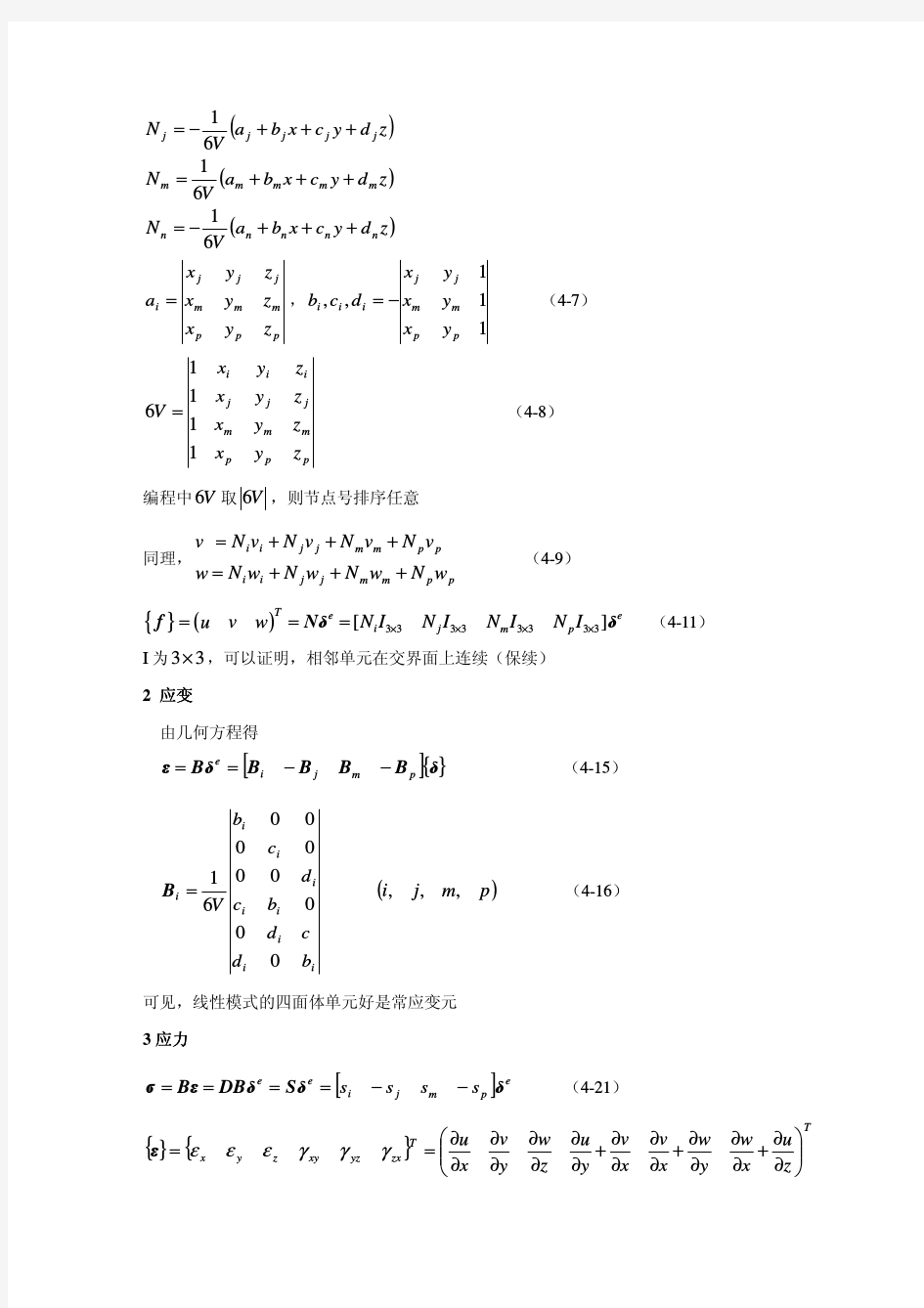
第三章 空间问题的有限元方法 引言 许多工程实际问题,属于空间问题,由于结构形状或受力的复杂性,用 经典弹性理论去求解它们的解析解是不可能的。 而有限元法处理此类问题, 原则 上不存在什么困难,本章将介绍一般空间问题的四面体单元。 一般空间问题的有限元列式 3.2.1 单元位移模式及插值函数 空间问题中,每个单元有四个结点,编码为 i,j,m,p 。每个结点有 3 个位移分量。每个结点 的位移可用位移矢量 i 表示,即 u i i v i (i , j ,m, p) w i 单元结点的位移向量可表示为 i e j u i v i w i u j v j w j u m v m w m u p v p w p T m p e 为单元结点位移列阵。 假设单元内的位移模式选取一次多项式 u 1 2 x 3 y 4 z v 5 6 x 7 y 8 z (3.2.1 ) w 9 10 x 11 y 12 z 由于四个结点也在单元内,满足位移模式,于是得 u i 12 x i 3 y i 4 z i u j 1 2 x j 3 y j 4 z j ( 3.2.2 ) u m 1 2 x m 3 y m 4 z m u p 1 2 x p 3 y p 4 z p 上式是关于 1 , 2, 3, 4 的线性方程组。 1, 2 , 3, 4 是待定常数,也称为广义坐
标。它可由( 3.2.2 )式求出。上式的系数行列式是 1x i y i z i 1x j y j z j 2V(3.2.3 ) D x m y m z m 1 1x p y p z p 上式中当 i,j,m,p 的编号顺序满足右手法则, V值为正,其大小为四面体体积,因此为了方便单元的编号一般满足右手法则。求得1 , 2 , 3 , 4后,回代入位移模式得 u N i u i N j u j N m u m N p u p(3.2.4) 式中 N i 1 (a i b i x c i y d i z)(i , j, m, p) (3.2.5) 6V x j y j z j a i x m y m z m x p y p z p 1y j z j b i1y m z m 1y p z p 1x j z j c i 1x m z m(i , j , m, p) (3.2.6) 1x p z p 1x j y j d i1x m y m 1x p y p 上式下标 (i ,j , m, p) 轮换,可得 a j , b j ,c j , d j, a m ,b m ,c m , d m及 a p , b p , c p ,d p。同理 , 也可得到其它两式 , 于是得 u N i u i N j u j N m u m N p u p v N i v i N j v j N m v m N p v p( 3.2.7)
Mmm 3 弹性力学平面问题的有限元法 本章包括以下的内容: 3.1弹性力学平面问题的基本方程 3.2单元位移函数 3.3单元载荷移置 3.4单元刚度矩阵 3.5单元刚度矩阵的性质与物理意义 3.6整体分析 3.7约束条件的处理 3.8整体刚度矩阵的特点与存储方法 3.9方程组解法 3.1弹性力学平面问题的基本方程 弹性力学是研究弹性体在约束和外载荷作用下应力和变形分布规律的一门学科。在弹性力学中针对微小的单元体建立基本方程,把复杂形状弹性体的受力和变形分析问题归结为偏微分方程组的边值问题。弹性力学的基本方程包括平衡方程、几何方程、物理方程。 弹性力学的基本假定如下: 1)完全弹性,2)连续,3)均匀,4)各向同性,5)小变形。 3.1.1基本变量 弹性力学中的基本变量为体力、面力、应力、位移、应变,各自的定义如下。 体力 体力是分布在物体体积内的力,例如重力和惯性力。 面力 面力是分布在物体表面上的力,例如接触压力、流体压力。 应力 物体受到约束和外力作用,其内部将产生内力。物体内某一点的内力就是应力。
图3.1 如图3.1假想用通过物体内任意一点p 的一个截面mn 将物理分为Ⅰ、Ⅱ两部分。将部分Ⅱ撇开,根据力的平衡原则,部分Ⅱ将在截面mn 上作用一定的内力。在mn 截面上取包含p 点的微小面积A ?,作用于A ?面积上的内力为Q ?。 令A ?无限减小而趋于p 点时,Q ?的极限S 就是物体在p 点的应力。 S A Q A =??→?0lim 应力S 在其作用截面上的法向分量称为正应力,用σ表示;在作用截面上的切向分量称为剪应力,用τ表示。 显然,点p 在不同截面上的应力是不同的。为分析点p 的应力状态,即通过p 点的各个截面上的应力的大小和方向,在p 点取出的一个平行六面体,六面体的各楞边平行于坐标轴。 图3.2 将每个上的应力分解为一个正应力和两个剪应力,分别与三个坐标轴平行。用六面体表面的应力分量来表示p 点的应力状态。应力分量的下标约定如下: 第一个下标表示应力的作用面,第二个下标表示应力的作用方向。 xy τ,第一个下标x 表示剪应力作用在垂直于X 轴的面上,第二个下标y 表示剪应力指 向Y 轴方向。
第四章 空间问题的有限元 在工程问题中,有些结构形状非常复杂,必须按照空间问题来求解。由于4节点四面体单元可以很好的模拟几何体的边界形状而被广泛使用。因此本章将介绍此种单元及8节点六面体单元。 §4.1 空间问题的离散化 在工程实际中,有些结构由于形体复杂,并且三个方向的尺寸同量级,必须按空间问题求解。空间问题有限元法的原理、思路和解题方法完全类同于平面问题的有限元法,所不同的是它具有三维特点。它所采用的离散化模型仍然是由若干单元在节点处连接而成的,而且节点仍为铰接,但是这些单元具有块体形状。它的基本未知量是节点位移,有3个分量:,,u v w 。它的分析方法仍然是先进行单元分析,再进行整体分析,最后求解整体平衡方程。但必须指出,由平面问题转换为空间问题给有限元分析带来了两个主要困难: 1、空间结构离散不像平面问题直观,当人工离散时很容易产生错误。 2、未知量的数量剧增,对于比较复杂的空间问题,计算机存储容量和计算机费用都会产生问题。 为解决上述两个问题,前者可通过寻找规律,建立网格自动生成前处理程序来克服,而后者则可采用高阶元以提高单元精度,达到减少未知量和节省机时的目的。 §4.2常应变四面体单元 §4.2.1位移函数 图4-1所示为四面体单元,以四个角点i ,j ,m ,l 为结点,每个结点有三个自 由度,因此由广义坐标给出的线性位移函数为 000000u ??β?β??? ??==?? ???? (4.2.1) 其中[]1x y z ?= 图4-1 四面体单元 []1212T ββββ=L 把四个节点坐标代入(4.2.1)式时,可得
{}000 000A q A A A ββ?? ??==?? ??? ? %%% (4.2.2) 其中{}T i i i j j j m m m l l l q u v w u v w u v w u v w ??=?? 1111i i i j j j m m m l l l x y z x y z A x y z x y z ??????=??? ??? % 由(4.2.2)式求出 {}1A q β-=% (4.2.3) 将(4.2.3)式代入(4.2.1)式后,则有 {}{}1i j m l u B A q N N N N q -??=Φ=Φ=I I I I ??&% (4.2.4) 其中100010001????I =?? ???? ()1 6i i i i i N a b x c y d z V = +++ ()1 6j j j j j N a b x c y d z V =- +++ ()1 6m m m m m N a b x c y d z V = +++ ()1 6l l l l l N a b x c y d z V =- +++ 称为形函数,它们的系数为 i j j i m m m l l l x y z a x y z x y z = 1 11j j i m m l l y z b y z y z = 111 j j i m m l l x z c x z x z = 111j j i m m l l x y d x y x y =
[] ()1 ,2 1 1112 1 =∴---++== i i i j k i j k i i k k j j i k k j j i i y x N y x y x y x y x y x y x y x y x y x A 即:()()()1,,,===k k k j j j i i i y x N y x N y x N (由i,j,k 轮换性知) 同理可证:()()0,,==k k i j j i y x N y x N (作业:证明:()()k j i j i y x N j j i ,,0,=≠=) 因此 ()()()()()()()()()()?? ??? ??===???≠===?======1 ,,0,,0,,1,00,,1,,0,0 ,,0,,1,k k k j j k i i k j i i k k j j j j i i j k k i j j i i i i y x N y x N y x N j i j i j N y x N y x N y x N y x N y x N y x N δ (2-12) 即形函数在自己节点上为1,在其余节点上为0。 2. 在单元上任意一点,三个形函数之和为1,即 ()()()1,,,=++y x N y x N y x N k j i 。 证明: ()()()()()()()[] y c c c x b b b a a a A y c x b a y c x b a y c x b a A y x N y x N y x N k j i k j i k j i k k k j j j i i i k j i ++++++++= ++++++++=++21 21 ,,,
3弹性力学平面问题的有限元法 本章包括以下的内容: 3.1弹性力学平面问题的基本方程 3.2单元位移函数 3.3单元载荷移置 3.4单元刚度矩阵 3.5单元刚度矩阵的性质与物理意义 3.6整体分析 3.7约束条件的处理 3.8整体刚度矩阵的特点与存储方法 3.9方程组解法 3.1弹性力学平面问题的基本方程 弹性力学是研究弹性体在约束和外载荷作用下应力和变形分布规律的一门学科。在弹性力学中针对微小的单元体建立基本方程,把复杂形状弹性体的受力和变形分析问题归结为偏 微分方程组的边值问题。弹性力学的基本方程包括平衡方程、几何方程、物理方程。 弹性力学的基本假定如下: 1)完全弹性,2)连续,3)均匀,4)各向同性,5)小变形。 3.1.1基本变量 弹性力学中的基本变量为体力、面力、应力、位移、应变,各自的定义如下。 体力 体力是分布在物体体积内的力,例如重力和惯性力。 面力 面力是分布在物体表面上的力,例如接触压力、流体压力。 应力 物体受到约束和外力作用,其内部将产生内力。物体内某一点的内力就是应力。
图3.1
如图3.1假想用通过物体内任意一点 p 的一个截面 mn 将物理分为I 、n 两部分。将部 分n 撇开,根据力的平衡原则, 部分n 将在截面 mn 上作用一定的内力。 在mn 截面上取包含 p 点的微小面积 A ,作用于:A 面积上的内力为:Q 。 令.\A 无限减小而趋于p 点时, Q 的极限S 就是物体在p 点的应力。 应力S 在其作用截面上的法向分量称为正应力,用 b 表示;在作用截面上的切向分量 称为剪应力,用T 表示。 显然,点p 在不同截面上的应力是不同的。 为分析点p 的应力状态,即通过p 点的各个 截面上的应力的大小和方向,在p 点取出的一个平行六面体,六面体的各楞边平行于坐标轴。 将每个上的应力分解为一个正应力和两个剪应力, 分别与三个坐标轴平行。用六面体表 面的应力分量来表示 p 点的应力状态。应力分量的下标约定如下: 第一个下标表示应力的作用面,第二个下标表示应力的作用方向。 xy ,第一个下标 x 表示剪应力作用在垂直于 X 轴的面上,第二个下标 y 表示剪应力指 向Y 轴方向。 正应力由于作用表面与作用方向垂直,用一个下标。 二x 表示正应力作用于垂直于 X 轴 的面上,指向X 轴方向。 应力分量的方向定义如下: 如果某截面上的外法线是沿坐标轴的正方向, 这个截面上的应力分量以沿坐标轴正方向 为正; 如果某截面上的外法线是沿坐标轴的负方向, 这个截面上的应力分量以沿坐标轴负方向 为正。 图3.2
一个受到集中力P 作用的结构,泊松比ν=61,m N P y 16=,t=1cm ,试按平面应力问题计算,采用三角形单元,求出节点位移。 解: 如图所示,划分三角形单元为四部分,并进行单元坐标编号,编程进行求解
单元①的刚度矩阵为: ???? ??????=333231232221 131211 1K K K K K K K K K K ()3,2,1===m j i 其中子矩阵表达式为: ???? ??????-+-+-+-+?-=s r s r s r s r s r s r s r s r rs b b v c c c b b c b c c b c c v b b Et K 21212121)1(42ννννν()m j i s r ,,,= E E E E E Et 2,,22210944.110944.121)611(401 .0)1(4--==?≈???? ??-??=? -ν 调用 Triangle2D3Node_Stiffness 函数,求出单元刚度矩阵: )3,2,1(0.2143 0 0 0.2143- 0.2143- 0.2143 0 0.5143 0.0857- 0 0.0857 0.5143- 0 0.0857- 0.5143 0 0.5143- 0.0857 0.2143- 0 0 0.2143 0.2143 0.2143- 0.2143- 0.0857 0.5143- 0.2143 0.7286 0.3000- 0.2143 0.5143- 0.0857 0.2143- 0.3000- 0.7286 '1===????????? ???????????=m j i E K
第三章 空间问题的有限元方法 引言 许多工程实际问题,属于空间问题,由于结构形状或受力的复杂性,用经典弹性理论去求解它们的解析解是不可能的。而有限元法处理此类问题,原则上不存在什么困难,本章将介绍一般空间问题的四面体单元。 一般空间问题的有限元列式 3.2.1 单元位移模式及插值函数 空间问题中,每个单元有四个结点,编码为i,j,m,p 。每个结点有3个位移分量。每个结点的位移可用位移矢量i α表示,即 ?? ?? ? ?????=i i i i w v u α ),,,(p m j i 单元结点的位移向量可表示为 [ ] T p p p m m m j j j i i i p m j i e w v u w v u w v u w v u =?????? ????????=ααααα ? e α为单元结点位移列阵。 假设单元内的位移模式选取一次多项式 z y x u 4321ββββ+++= z y x v 8765ββββ+++= (3.2.1) z y x w 1211109ββββ+++= 由于四个结点也在单元内,满足位移模式,于是得 i i i i z y x u 4321ββββ+++= j j j j z y x u 4321ββββ+++= (3.2.2) m m m m z y x u 4321ββββ+++= … p p p p z y x u 4321ββββ+++=
上式是关于4321,,,ββββ的线性方程组。4321,,,ββββ是待定常数,也称为广义坐标。它可由(3.2.2)式求出。上式的系数行列式是 V z y x z y x z y x z y x D p p p m m m j j j i i i 21111== (3.2.3) 上式中当i,j,m,p 的编号顺序满足右手法则,V 值为正,其大小为四面体体积,因此为了方便单元的编号一般满足右手法则。求得4321,,,ββββ后,回代入位移模式得 p p m m j j i i u N u N u N u N u +++= (3.2.4) 式中 )(61 z d y c x b a V N i i i i i +++= ),,,(p m j i (3.2.5) p p p m m m j j j i z y x z y x z y x a = - p p m m j j i z y z y z y b 111-= p p m m j j i z x z x z x c 111= ),,,(p m j i (3.2.6) p p m m j j i y x y x y x d 111-= 上式下标),,,(p m j i 轮换,可得j j j j d c b a ,,,,m m m m d c b a ,,,及p p p p d c b a ,,,。 同理,也可得到其它两式,于是得
计算力学(有限元方法部分) 程序设计 程序说明书 程序1:平面问题的有限元分析 文件名:h01.m 算例文本:h01.txt 输出文本:result1.txt 使用前请先将h01.txt放入默认的文本读取路径(我的要求与m文件在同一文件夹内)! 文本输入顺序: 材料信息(编号、弹性模量、泊松比) 注意:材料编号须按1、2、3、4……的顺序排列 节点信息(编号、x坐标、y坐标) 注意:节点编号须按1、2、3、4……的顺序排列 约束信息(约束节点号、x方向有无约束、y方向有无约束、x方向位移、y 方向位移)有约束处填一正数,无约束处填0。无约束处请勿输入位移。 单元信息(厚度、材料编号、节点编号,若为3节点单元,则第四个编号填0) 注意:单元编号须按1、2、3、4……的顺序排列 集中力(作用节点号、x方向力、y方向力) 线荷载(作用边上的两个节点号、x方向分布力、y方向分布力) 面荷载(作用单元号、x方向分布力、y方向分布力) 程序可调部分: 4-6行中可以指定输出哪些图像(按顺序依次为节点、单元图像,x、y方向位移图像,xx、yy、xy方向应力图像),第7行中可以指定输入的.txt文本名称。 文本输出内容: 结点位移信息(节点号、x方向位移、y方向位移) 单元形心处的应变信息(单元号、x方向正应变、y方向正应变、xy方向工程切应变)
单元形心处的应力信息(单元号、x方向正应力、y方向正应力、xy方向切应力) 本程序附有三角形单元自动加密前处理部分h01auto.m,其算例文本: h01coarse.txt,输出文本:h01new.txt。它可以适用于本题的要求,在已给定本题所需全部信息的情况下将已有的单元加密为三角形单元。其输出文本可直接作为上面程序的输入文本。 h01.m h01.txt h01auto.m h01coarse.txt 欢迎交流与提问!附上邮箱:x67891@https://www.doczj.com/doc/115230823.html,。祝力学学习顺利!
第三章作业 3-1:试证明平面三角形单元内任一点的形函数之和恒等于1。 证明1:设单元发生X 方向的刚体位移0u ,则单元内到处应有位移0u ,有 0u u u u m j i === ()00u u N N N u N u N u N u m j i m m j j i i =++=++= 1=++m j i N N N 若位移函数不满足此要求,则不能反映单元的刚体位移,不能得到正确的结果。# 证明2:设P 是三角形内任一点,可用面积坐标表示为() m j i L L L P 。由面积坐标的定义和性质知1=++m j i L L L ,且三节点三角形的一点的面积坐标即为其形函数,故平面三角形单元内任一点的形函数之和恒等于1。# 3-2:试证明三角形单元的任一边上的一点的三个形函数与第三个顶点的坐标无关。 证明1:设k 是三角形ij 边上的任一点,点k 面积坐标得 0==m m L N # 证明2:三角形单元是协调单元,必须在单元边界上保持连续性,所以在单元边界上的点的位移只能由边上两个节点的形函数来贡献,否则就会撕裂和重叠,即(如在ij 边上的点) j j i i j j i i v N v N v u N u N u +=+= 故三角形的三边上的点的形函数只与边上节点的坐标有关,而与第三点无关。# 3-3:证明三角形单元是常应变单元。 证明: y x u 321ααα++=,y x v 654ααα++= 2αε=??= x u x 6αε=??= y v y
53ααγ+=??+??= x v y u xy # 即三角形单元是常应变单元。 3-4:已知单元刚度矩阵[][][][]tdxdy B D B k T A e ??= ,试说明[][]D B ,分别是什么矩阵,与单 元的那些特性有关?若厚度为t 的平面三角形常应变单元ijm 的单元刚度矩阵记为: [][][] [][][] []??? ? ? ?? ???=mm jm jj im ij ii k k k k k k k 说明子块[] ij k 的物理意义,并证明[]k 为对称矩阵。 解:[]B 是应变矩阵又称几何矩阵,与单元节点坐标有关;[]D 为弹性矩阵,与材料的弹性常数E 、μ有关。 []ij k 表示当节点j 处产生单位位移,其余节点完全被约束时,在节点i 处引起的节点力。 利用矩阵的运算关系 [] [][][][] [][][] []tA B D B tA B D B k T T T T T T T == 由于[]D 是对称矩阵,[][]D D T = 所以[][][][][]k tA B D B k T T ==,即[]k 为对称矩阵。# 3-5:图示平面等腰三角形单元,若3.0=μ,弹性模量为E ,厚度为t ,求形函数矩阵[]N 、应变矩阵[]B 及单元刚度矩阵[]K 。(补充题意:平面应力情况) 解:对平面等腰直角三角形建立图示坐标系。 x y