
Influence of the Motion Errors to Airborne BiSAR
Geolocation Accuracy
Ya Li Yong Li
College of Electronic and Information Engineering, Nanjing University of Astronautics and Aeronautics
No.29 Yudao Street, Nanjing, 210016 China
limack@https://www.doczj.com/doc/181354687.html,
Abstract—The image based geolocation accuracy is important in evaluating the performance of the bistatic synthetic aperture radar (BiSAR) system. Most of the errors are originated from the insufficient measurement accuracy of the motion parameters. In this paper, given the BiSAR geometric model, the influence on geolocation accuracy caused by the transmitter's motion errors from the viewpoints of imaging is mainly analyzed. The Newton iteration method is a method used to solve the nonlinear equations.Mathematic expressions can be derived using the Newton iteration method .Using the derived mathematic expressions in the text, the simulation results are provided to show the quantitative impact of motion errors on the image and target positioning.
Keywords-bistatic synthetic aperture radar (BiSAR); geolocation; parameter error
I. INTRODUCTION
Geolocation accuracy is one of the key terms applied to evaluate performance of synthetic aperture radar (SAR) systems, whose definition is the degree of closeness between the spatial entity's coordinate-dates and the real position of the entity. Those evaluated performance by the location-error is significant to SAR application: in the military reconnaissance, deci sion-makers have to strictly positioning targets on the ground; in the ocean surveillance, vessel monitoring and sea rescues have to accurate positioning the ships.
Bistatic synthetic aperture radar (BiSA R) has separated transmitter and receiver[1].Compared with the monostatic SAR, BiSAR has many advantages such as longer detection range, access to more abundant information, higher mobility and higher elu-sivness, better ECCM capability and anti-intercept capability, hence BiSA R has stronger living ability. These advantages make BiSAR be promising in military application[6].
The factors that can influence positioning accuracy of the airborne SAR include motion errors of the transmitter and receiver, the height errors,etc. In this paper, the influence to the positioning accuracy because of the motion errors caused by the transmitter is mainly analyzed from geometrical model of the BiSA R [2][3].
II. GEOMETRICAL MODEL OF BISA R
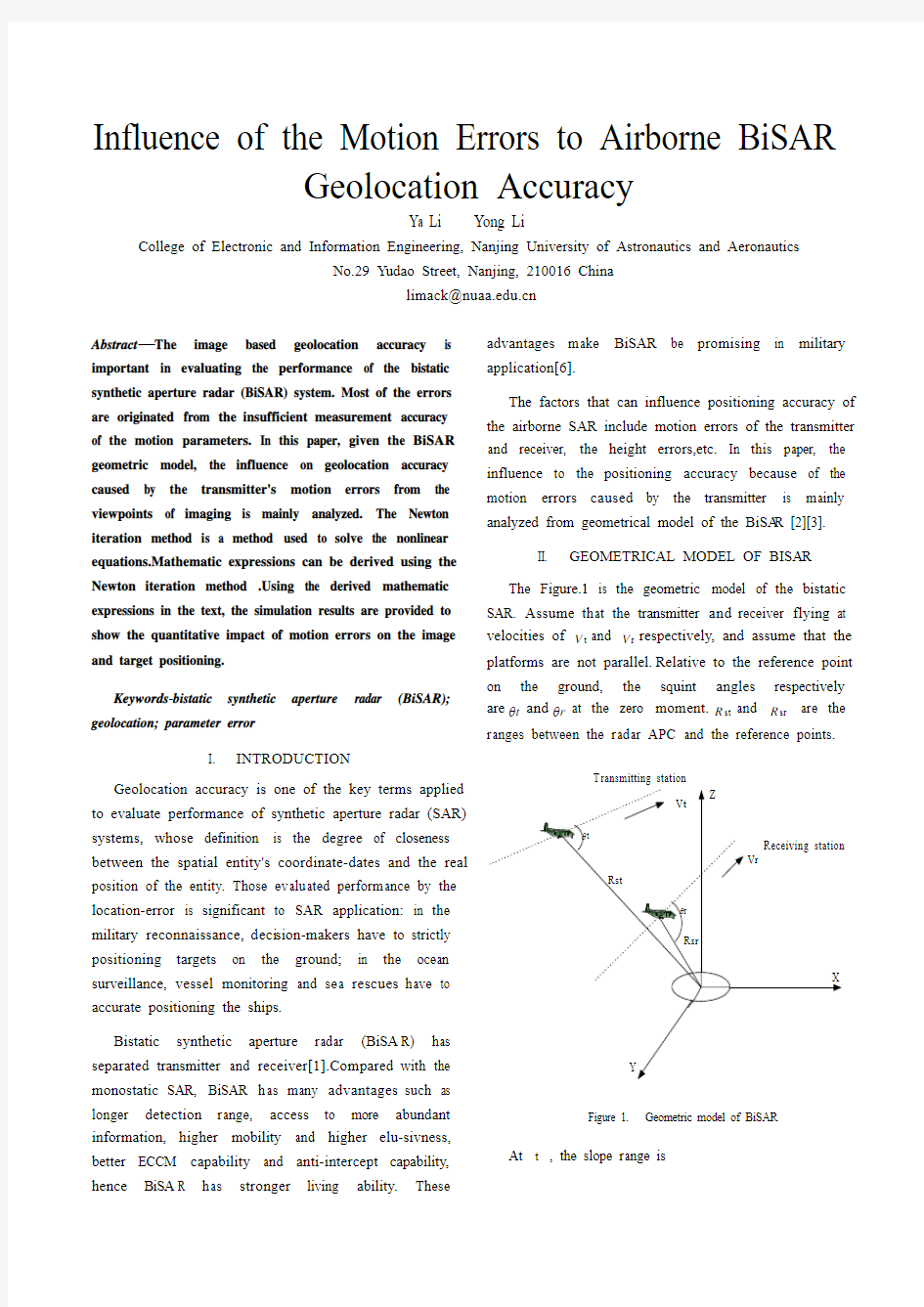
The Figure.1 is the geometric model of the bistatic SAR. Assume that the transmitter and receiver flying at velocities of
t
V and r V respectively, and assume that the platforms are not parallel. Relative to the reference point on the ground, the squint angles respectively
are tθand rθat the zero moment.
st
R and sr
R are the ranges between the radar APC and the reference points.
Receiving station
T ransmitting station
Vt
Vr
Rst
Rsr
X
Y
Z
rθ
tθ
Figure 1. Geometric model of BiSAR At t, the slope range is
(t)R (t)R R(t) t r +=
(1)
where
??
??
??+θ????=?+θ????=2)t V ()(sin R t V 2-2R (t)R 2)
t V ()(sin R t V 2-2R (t)R r r sr r sr r t t st t st t (2) III.
FORMULA DEDUCTION
The imaging area will not be changed though there are errors, still in the effect of the wave. However, the position of the reference point will be changed because of the motion errors[2].
A. Influence caused by the motion errors to the imaging Linear Range-Doppler(LRD) algorithm will be applied in the imaging processing[7], the motion errors will change the ranges and the Doppler-frequency, so the position of the reference point will be changed, hence, the position of the targets on the ground also be changed. The variation of the ranges will cause distance-drift, and the variation of the Doppler-frequency will cause
azimuth-drift.
Distance variation caused by the motion errors can be expressed as follows:
2
r
2
o r 2
o r 2
t 2
o t 2
o t 2
r
2
o r 2
o r 2
t
2o t 2o t H )'Y Y ()'X X (H )'Y Y ()'X X (H )Y Y ()X X (H )Y Y ()X X (r +-+--
+-+--+-+-++-+-=
? (3)
Where
)(0,,O O Y X is the coordinate of the reference point before introducing errors, and
),(0','O O Y X is the coordinates after introducing errors. We can obtain the
drift units at the range-direction:pr Nr /r ?=?,where pr is resolution in slant range . Doppler-frequency variations caused by the motion errors can be expressed as follows:
22
2
22
2
22
2
1()()()()1()()()()1()(')()(')(')(')1(')('-
tx o t ty o t tz t
d o t o t t
rx o r ry o r rz r
o r o r r
tx ex o t ty ey o t tz ez t
o t o t t
rx ex o V X X V X X V H
f X X y Y H
V X X V Y Y V H
X X Y Y H
V V X X V V Y Y V V H
X X Y Y H
V V X X λ
λ
λ
λ
-+--??=
-+-+-+--?+
-+-++-++--+?-
-+-++-()22
2
)(')(')'(')(')r ry ey o r rz ez r
o r o r r
V V Y Y V V H
X X Y Y H
++--+?-+-+() (4) Where )(tz ty V V V ,,tx and )(rz ry V V V ,,rx are the velocities of the transmitter and the receiver at X,Y ,Z directions. )(ez ey V V V ,,ex , )(‘’‘ez ey V V V ,,ex are the velocity-error of
the
transmitter and the receiver.Na
PRF
fd N ?=
?a , where PRF is the pulse
repeat frequency. Na PRF / is resolution in azimuth. B. Influence to the positioning
The motion errors cause the image drift, hence there must be positioning errors.
(/2)/(/2)p dc a a a ref r r r
f f m N N PRF N R R n N N p =+-?-???=+-?-?? (5) where,
2
)
Z Z (2
)
Y Y (2
)
X X (2
)
Z Z (2)Y Y (2X X R o r o r o r o t o t o t ref -+-+-+
-+-+-=)( (6)
Where,m and n are coordinates of the corresponding
point in simulated imaging .Using the Newton iteration
method[8],new coordinate of the target
)(',','p p p Z Y X can be deduced.If there are no errors, the coordinate of the target is )(P P P Z Y X ,,. So the positioning error is :
??
?-=?-=?p
p p p
p p Y 'Y Y X 'X X (7)
2
p
2p Y X E ?+?=? (8)
IV SIMULATION RESUL TS
According to the relative theory about imaging and targets positioning[4][7][9][10][11]. As is showed in figure 1 the reference point O is located at the origin of coordinate system, parameters are setted as table1. To deduce the influence caused by velocity errors of the transmitter at X-direction or Y-direction. The error-band is(-1.0m,1.0m) at regular interval, such as 0.1m.
TABLE 1
SIMULA TION PAR AMETERS
parameters
Transmitter values
Receiver values
V elocity in X direction
140.9m/sec
76.6m/sec
V elocity in Y direction 51.3m/sec 65.0m/sec
V elocity in Z direction
0m/sec
Altitude 8000m 500m
Center frequency X Band Range bandwidth 80MHZ Doppler bandwidth
2500HZ
Slope ranges 50000m 9000m
Squint angles 35.5° 40.0°
velocity 150m 100m
The influence caused by motion errors when the velocity of the transmitter is 150m/s is analyzed, the figure following is E ?when the band of x V e and
ey V is (-1.0m,1.0m),at regular intervals, such as
0.1m.Figure 3 as following shows the different position-errors with different velocities in X-direction.
Figure 2. Positioning-error
Figure 3.Position-errors with different velocities
Table 2 shows the geolocation-error caused by velocity error of transmitter at X-direction :
TABLE 2
POSITIONING-ERROR CAUSED B Y MOTION-ERROR
IN X-DIREC TION
V elocity-errors(m/s) -1.0 -0.5 0.5 1.0
Positioning-errors(m) 113.247 56.445 56.093 111.837
Table 3 shows the influence caused by velocity error
of transmitter at Y-direction :
TABLE 3 POSITIONING-ERROR CAUSED BY MOTION-ERROR
IN Y-DIREC TION
V elocity-errors(m/s) -1.0 -0.5 0.5 1.0
Positioning-errors(m) 308.488 154.77 154.421 308.898
Next, the influence in positioning-errors caused by detection range will be considered. That the influence will be analyzed when the detection range is either 40km or 60km.Table 4 shows the different positioning-errors with different detection-ranges, positioning-errors(1) shows the errors when the detection-range is 40km and (2) shows the errors when the detection-range is 60km.
TABLE 4 DIFFER ENT POSITIONING-ERROR WITH
DIFFER ENT RANGES
V elocity-errors(m/s) -1.0 -0.5 0.5 1.0 Positioning-errors(1)(m) 89.925 44.821 44.541 88.806
Positioning-errors(2)(m) 136.441 68.006 67.581 134.742
According to table 2 and 4 ,we know that the positioning-error will increase with the increasement of the detection ranges .Also,that the positioning-error decrease as the velocity increase can be seen under the same parameters, as following table 5.Table 5 shows the different influence when the velocity at X-direction is either 140m/s or 160m/s.(1) shows the influence when the velocity is 140m/s, and (2) shows the influence when the velocity is 160m/s.
TABLE 5 DIFFER ENT POSITIONING-ERROR WITH
DIFFER ENT VELOCITIES
V elocity-errors(m/s) -1.0 -0.5 0.5 1.0 Positioning-errors(1)(m) 121.391 60.491 60.0865 119.772 Positioning-errors(2)(m) 106.127 52.907 52.597 104.888
V CONCLUSION
In this paper,the LRD algorithm and the Newton iteration method were used in research of the influences of the motion errors in airborne BiSA R geolocation accuracy .The relationship between velocity difference and position-error was deduced. Al so, the relationship between the detection-range difference and the position-error was deduced. As the simulation results show that the relative theories introduced and analyzed in section III are reasonable .In later study, we'll consider the influence of other parameters.
REFERENCE
[1]Y.Neo,F.Wang,andI.G.Cumming,"A two-dimensional specturm
for bistaticSAR processing using series reversion," vol.4,no.1, pp.93-96,Jan.2007.
[2]I.Walterscheid,A.B renner,andJ.Ender,"Geometry and system
aspects for a bistatic airborne SAR-experiment,"in Proc.EUSAR Conf.,Ulm,Germany,May 2004,pp.567-570.
[3]K.Natroshvili,O.Loffeld,H.Nies,A.Ort iz,"Fist steps to bistaitc
focusing", Proc. IGARSS,2005,Seoul,Korea.Jun,2005
[4]Qiu X L,Hu D H,Ding C B.An improved NLCS algorithm
withcapability analysis for one-stationary BISAR.IEEETrans Geosci Remote Sens, 2008,46:3179-3186.
[5] D.D'Aria,A.Monti Guarnieri,and F.Rocca,"Focusing bistatic
synthetic aperture radar using dip move out,"IEEE.Trans.Geosci.Remotesens.,vol,42,no.7,pp.1362-1376,ju l.2004.
[6]Geng X P,Yan H H,Wang Y F.A two-dimensional spectru m model
for general bistatic SAR.IEEE Trans Geosci Remote Sens,2008,46:2216-2223
[7]Li Yong,Zhu Dai-yin,Zhu Zhao-da "Study on High Resolu tion
Overlapped Subaperture Imaging Algorithm for Hig h Squint Airborne SAR Processing",Journal of Electronics and Information technolog y,Vol.28 No.9 Sept.2006.
[8]L.Bar and G.Sapiro,"Generalized Newton method for energ y
formulations in image processing",IMA preprint Series 2195,university of Minnesota.
[9]Adilb Y N,Fawwaz T U.Bistatic SAR imaging:a novel approach
using stationary receiver.In:IEEE I nternational Geosci and Renote Sens Symposium. Barcelona: IEEE,2005.1056-1059.
[10]Krieger G,Moreira A. Spaceborne Bi-and
MultistaticSAR:Potential sand Challenges[J]. IEE Proc,Radar Sonar Navig,2006,153(3):184-198.
[11]L.Bar and G.Sapiro,"Generalized Newton method for energ y
formulations in image processing,"IMA Preprint Series 2195,University of Minnesota.
张小只智能机械工业网 张小只机械知识库工业机器人的重复定位精度是如何测量的 重复定位精度是工业机器人最重要的性能指标之一。位置重复性是工业机器人制造商指定的唯一的定位性能指标,在他们的宣传册上有0.010 毫米和0.100 毫米之间变化。然而,计量从此发生了改变,到底如何测量位置重复性的大小? 如果你幸运的话,像我们先进的计量设备有很多,你可以使用激光干涉仪。后者是非常准确的(0.001 毫米测量不确定度),但价格昂贵(约50000美元),难以建立措施在同一时间只有一个坐标。你也可以使用CMM,但这显然是不现实的。你可以 使用各种类型的三维测量设备,但某些工业机器人制造商使用激光跟踪仪因为他们已经使用一些机器人标定激光跟踪仪。所以我们到底应不应该应该相信工业机器人厂商提供的重复数据? 一个基本的方法在ISO/TR 13309:1995提出依托三个正交使用位置传感器的安装。我最近买了一个这样的装置:三一探针IBS精密工程。后者是无线的,轻便小巧,而且不贵(约15000美元)。其测量不确定度约为0.001 mm,其测量范围是3.5 毫米。不幸的是,它采用电涡流传感器需要特殊基准球,成本超过500美元每安装在纤细的茎而且很容易打破。 一个非常重要的,我们的三维探测新的组件标定板。后者本质上是以三球的原理在三V形槽的运动平台。在测试我们的三维探头在发那科LR伴侣200iC的工业机器人(借给我们的通用航空)和ABB IRB 120机器人时,我们使用一个定制的枢接座三0.5″基准球,每一对分开约300毫米。使用非常简单的matlab代码,我们可以从每一个数字指标获取位置数据并发送到机器人控制器通过以太网。每个机器人的控制器,然后运行一个程序,执行自动测试。这个测试程序如下。
机械类常用英语词汇大全 一字螺丝批 slot type screwdriver 一点透视 one-point perspective 二画 二合一黏合剂 epoxy resin adhesive 二合胶;混合胶 epoxy glue 二维的;平面的 two-dimensional 二进制 binary 二极管;整流子 diode 二号螺丝攻 second tap 二路开关 two-way switch 十进制的;公制的 metric 人工制品 artefact 人造板 man-made board 人体工程学 ergonomics; human engineering 人体尺寸 human dimension 人体测量学 anthropometry; anthropometrics 刀片 blade 刀身 blade 刀具 tool 刀具溜座 carriage 刀柱 tool post 刀架 tool rest 刀架底座 tool rest bracket 刀座帷;床鞍 apron 刀座鞍;溜板座 saddle 力 force 力三角形 triangle of force 力平行四边形 parallelogram of force 力多边形;多边形力学 polygon of force 力的分解 force resolution 力架;亮漆 lacquer 力矩 moment 力偶 couple 力矩定律 law of moment 力-距离图表 force-distance graph 力图 force diagram 力线 line of force 力点 effort 十字榫 cross halving joint 十字螺丝 Philip s head screw 十字螺丝批 Philip s type screwdriver 丁字尺;T 尺 tee square 三画 三爪夹头 three-jaw chuck 三角尺 set square 三角形结构系杆 triangulation tie 三角锉 triangular file 三维的;立体的 three-dimensional 三氯甲烷;哥罗芳 chloroform 三聚氰胺;蜜胺 melamine 三点透视 three-point perspective 上油漆 painting 上釉 enamelling 凡立水 varnish 叉形顶尖 fork centre 口罩 mask 士力;虫漆 shellac 士巴拿;扳手 spanner 大芯夹板;宽条芯夹板 blockboard; solid corestock-laminated board 大量制造 mass production
高一物理牛顿运动定律单元测试 试卷满分100分,时间90分钟 一、本题共10小题,每小题4分,共40分.在每小题给出的四个选项中,有的小题只有一 个选项正确,有的小题有多个选项正确.全部选对的得4分,选不全的得2分,有选错或不答的得0分. 1.下述力、加速度、速度三者的关系中,正确的是()A.合外力发生改变的一瞬间,物体的加速度立即发生改变 B.合外力一旦变小,物体的速度一定也立即变小 C.合外力逐渐变小,物体的速度可能变小,也可能变大 D.多个力作用在物体上,只改变其中一个力,则物体的加速度一定改变 2.在谷物的收割和脱粒过程中,小石子、草屑等杂物很容 易和谷物混在一起,另外谷有瘪粒,为了将它们分离, 农村的农民常用一种叫“风谷”的农具即扬场机分选,如 图所示,它的分选原理是() A.小石子质量最大,空气阻力最小,飞的最远 B.空气阻力对质量不同的物体影响不同 C.瘪谷粒和草屑质量最小,在空气阻力作用下,反向加速度最大,飞的最远 D.空气阻力使它们的速度变化不同 3.跳伞运动员从静止在空中的直升飞机上下落,在打开降落伞之前做自由落体运动,打开降落伞之后做匀速直线运动。则描述跳伞运动员的v-t图象是下图中的()
4.为了节省能量,某商场安装了智能化的电动扶梯。无人乘行时,扶梯运转得很慢;有人站上扶梯时,它会先慢慢加速,再匀速运转。一顾客乘扶梯上楼,恰好经历了这两个过程,如图所示。那么下列说法中正确的是 ( ) A .顾客始终受到三个力的作用 B .顾客始终处于超重状态 C .顾客对扶梯作用力的方向先指向左下方,再竖直向下 D .顾客对扶梯作用的方向先指向右下方,再竖直向下 5.如图所示,一条不可伸长的轻绳跨过质量可忽略不计的光滑定滑轮, 绳的一端系一质量m =15㎏的重物,重物静止于地面上,有一质量 m =10㎏的猴子,从绳子的另一端沿绳子向上爬.在重物不离开地 面条件下,猴子向上爬的最大加速度为(g =10m/s 2) ( ) A .25m/s 2 B .5m/s 2 C .10m/s 2 D .15m/s 2 6.物块A 1、A 2、B 1和B 2的质量均为m ,A 1、A 2用刚性轻杆连接,B 1、B 2用轻质弹簧连结。两个装置都放在水平的支托物上,处于平衡状态,如图所示。今突然迅速地撤去支托物,让物块下落。在除去支托物的瞬间,A 1、A 2受到的合力分别为f 1和f 2,B 1、B 2受到的合 v o t v o t v o t v o A B D C
第二章 误差和分析数据处理 第一节 概 述 定量分析的任务是要准确地解决“量”的问题,但是定量分析中的误差是客观存在的,因此,必须寻找产生误差的原因并设法减免,从而提高分析结果的可靠程度,另外还要对实验数据进行科学的处理,写出合乎要求的分析报告。 第二节 测量误差 一、绝对误差和相对误差 1. 绝对误差 测量值与真实值之差称为绝对误差。δ = x - μ 2. 相对误差 绝对误差与真值的比值称为相对误差。 %100%100?-=?μ μμδ x 若真实值未知,但δ 已知,也可表示为 %100?x δ 3. 真值与标准参考物质 理论真值:如某化合物的理论组成等。 约定真值:如国际计量大会上确定的长度、质量、物质的量单位等。 相对真值:如标准参考物质的含量。 标准参考物质:经权威机构鉴定并给予证书的,又称标准试样。 实际工作中,常把最有经验的人用最可靠的方法对标准试样进行多次测定所得结 果的平均值作为真值的替代值。 二、系统误差和偶然误差 1. 系统误差(可定误差) 由某种确定的原因引起,一般有固定的方向,大小在试样间是恒定的,重复测定 时重复出现。
按系统误差的来源分类:方法误差、仪器或试剂误差、操作误差。 方法误差:滴定分析反应进行不完全、干扰离子的影响、滴定终点与化学计量点 不符、副反应的发生、沉淀的溶解、共沉淀现象、灼烧时沉淀的分解或挥发。 仪器或试剂误差:砝码、容量器皿刻度不准、试剂中含有被测物质或干扰物质。 操作误差:称样时未注意防止吸湿、洗涤沉淀过分或不充分、辨别颜色偏深(浅)、 读数偏高(低)。 按系统误差的数值变化规律分类:恒定误差、比例误差。 系统误差可用加校正值的方法予以消除。 2. 偶然误差(随机误差、不可定误差) 由于偶然的原因如温度、湿度波动、仪器的微小变化、对各份试样处理时的微小 差别等引起,其大小和正负都不固定。 偶然误差服从统计规律,可用增加平行测定次数加以减免。 三、准确度和精密度 1. 准确度与误差 准确度表示分析结果与真实值接近的程度。准确度的大小用绝对误差或相对误差 表示。评价一个分析方法的准确度常用加样回收率衡量。 2. 精密度与偏差 精密度表示平行测量的各测量值之间互相接近的程度。精密度的大小可用偏差、 相对平均偏差、标准偏差和相对标准偏差表示。重复性与再现性是精密度的常见别名。 偏差:d = x i - x 平均偏差: n x x d n i i ∑=-=1 相对平均偏差: %100/)(%1001?-=?∑=x n x x x d n i i 标准偏差(标准差): 1 )(1 2 --= ∑=n x x S n i i
《第四章牛顿运动定律》单元检测 一.选择题(本题共10小题,每小题5分,共50分.在每小题给出的四个选项中,有的只有一个选项正确,有的有多个选项正确,全部选对的得5分,选对但不全的得3分,有选错或不答的得0分) 1.如图所示,木块放在表面光滑的小车上并随小车一起沿桌面向左做匀速直线运动.当小车遇障碍物而突然停止运动时,车上的木块将() A.立即停下来 B.立即向前倒下 C.立即向后倒下 D.仍继续向左做匀速直线运动 2.一个铅球和一个皮球相互挤压的时候,以下叙述正确的是() A.铅球对皮球的压力大于皮球对铅球的压力 B.铅球的形变小于皮球的形变 C.皮球对铅球的压力和铅球对皮球的压力一定同时产生 D.铅球对皮球的压力与皮球对铅球的压力是一对平衡力 3.(2009·山东)某物体做直线运动的v-t图象如图(a)所示,据此判断图2(b)(F表示物体所受合力,t表示物体运动的时间)四个选项中正确的是() 4.如图所示,在热气球下方开口处燃烧液化气,使热气球内部气体温度升高,热气球开始离地,徐徐升空.分析这一过程,下列表述正确的是() ①气球内的气体密度变小,所受重力也变小 ②气球内的气体密度不变,所受重力也不变 ③气球所受浮力变大 ④气球所受浮力不变 A.①③B.①④C.②③D.②④
5.质量为m 的滑块,以一定的初速度沿粗糙的斜面体向上滑,然后又返回地面,斜面与地面之间没有滑动。那么,在这个过程中,下面的说法正确的是:() A .斜面与地面的摩擦力大小改变,方向不变 B .斜面与地面的摩擦力大小和方向都变化 C .斜面与地面的摩擦力大小不变,方向变化 D .斜面与地面的摩擦力大小和方向都不变 6.如图所示,有两个相同材料物体组成的连接体在斜面上运动,当作用力F 一 定时,m 2所受绳的拉力() A .与θ有关 B .与斜面动摩擦因数有关 C .与系统运动状态有关 D .F T = m 2F m 1+m 2 ,仅与两物体质量有关 7.如图,一个盛水的容器底部有一小孔.静止时用手指堵住小孔不让它漏水,假设容器在下述几种运动过程中始终保持平动,且忽略空气阻力,则() A .容器自由下落时,小孔向下漏水 B .将容器竖直向上抛出,容器向上运动时,小孔向下漏水;容器向下运动时,小孔不向下漏水 C .将容器水平抛出,容器在运动中小孔向下漏水 D .将容器斜向上抛出,容器在运动中小孔不向下漏水 8.如图中a 、b 是两个位于固定斜面上的正方形物块,它们的质量相等.F 是沿水平方向作用于a 上的外力.已知a 、b 的接触面,a 、b 与斜面的接触面都是光滑的.正确的说法是() A .a 、b 一定沿斜面向上运动 B .a 对b 的作用力沿水平方向 C .a 、b 对斜面的正压力相等 D .a 受到的合力沿水平方向的分力等于b 受到的合力沿水平方向的分力 9.物体A 、B 、C 均静止在同一水平面上,它们的质量分别为m A 、m B 、m C ,与水平面的动摩擦因数分别为μA 、μB 、μC ,用平行于水平面的拉力F 分别拉物体A 、B 、C ,所得加速度 a 与拉力F 的关系如图所示,A 、B 两直线平行,则以下关系正确的是() A .m A 基本概念题 1.误差的定义是什么?它有什么性质?为什么测量误差不可避免? 答:误差=测得值-真值。 误差的性质有: (1)误差永远不等于零; (2)误差具有随机性; (3)误差具有不确定性; (4)误差是未知的。 由于实验方法和实验设备的不完善,周围环境的影响,受人们认识能力所限,测量或实 验所得数据和被测量真值之间不可避免地存在差异,因此误差是不可避免的。 2.什么叫真值?什么叫修正值?修正后能否得到真值?为什么? 答:真值:在观测一个量时,该量本身所具有的真实大小。 修正值:为消除系统误差用代数法加到测量结果上的值,它等于负的误差值。 修正后一般情况下难以得到真值。因为修正值本身也有误差,修正后只能得到较测得值更为准确的结果。 3.测量误差有几种常见的表示方法?它们各用于何种场合? 答:绝对误差、相对误差、引用误差 绝对误差——对于相同的被测量,用绝对误差评定其测量精度的高低。 相对误差——对于不同的被测俩量以及不同的物理量,采用相对误差来评定其测量精度的高低。 引用误差——简化和实用的仪器仪表示值的相对误差(常用在多档和连续分度的仪表中)。4.测量误差分哪几类?它们各有什么特点? 答:随机误差、系统误差、粗大误差 随机误差:在同一测量条件下,多次测量同一量值时,绝对值和符号以不可预定方式变化着的误差。 系统误差:在同一条件下,多次测量同一量值时,绝对值和符号保持不变,或在条件改变时,按一定规律变化的误差。 粗大误差:超出在规定条件下预期的误差。误差值较大,明显歪曲测量结果。 5.准确度、精密度、精确度的涵义分别是什么?它们分别反映了什么? 答:准确度:反映测量结果中系统误差的影响程度。 精密度:反映测量结果中随机误差的影响程度。 精确度:反映测量结果中系统误差和随机误差综合的影响程度。 《牛顿运动定律》单元检测A 一、选择题(在每小题给出的四个选项中,至少有一个选项是正确的) 1.下面说法中正确的是()A.力是物体产生加速度的原因 B.物体运动状态发生变化,一定有力作用在该物体上 C.物体运动速度的方向与它受到的合外力的方向总是一致的 D.物体受外力恒定,它的速度也恒定 2.有关惯性大小的下列叙述中,正确的是()A.物体跟接触面间的摩擦力越小,其惯性就越大 B.物体所受的合力越大,其惯性就越大 C.物体的质量越大,其惯性就越大 D.物体的速度越大,其惯性就越大 3.下列说法中正确的是()A.物体在速度为零的瞬间,它所受合外力一定为零 B.物体所受合外力为零时,它一定处于静止状态 C.物体处于匀速直线运动状态时,它所受的合外力可能是零,也可能不是零 D.物体所受合外力为零时,它可能做匀速直线运动,也可能是静止 4.马拉车由静止开始作直线运动,以下说法正确的是()A.加速前进时,马向前拉车的力,大于车向后拉马的力 B .只有匀速前进时,马向前拉车和车向后拉马的力大小才相等 C .无论加速或匀速前进,马向前拉车与车向后拉马的力大小都是相等的 D .车或马是匀速前进还是加速前进,取决于马拉车和车拉马这一对力 5.如图1所示,物体A 静止于水平地面上,下列说法中正确的是 () A .物体对地面的压力和重力是一对平衡力 B .物体对地面的压力和地面对物体的支持力是一对平衡力 C .物体受到的重力和地面对物体的支持力是一对平衡力 D .物体受到的重力和地面支持力是一对作用力和反作用力 6.物体在合外力F 作用下,产生加速度a ,下面说法中正确的是 () A .在匀减速直线运动中,a 与F 反向 B .只有在匀加速直线运动中,a 才与F 同向 C .不论在什么运动中,a 与F 的方向总是一致的 D .以上说法都不对 7.在光滑水平面上运动的木块,在运动方向受到一个方向不变,大小从某一数值逐渐变小的外 力作用时,木块将作() A .匀减速直线运动 B .匀加速直线运动 C .速度逐渐减小的变加速运动 D .速度逐渐增大的变加速运动 8.火车在平直轨道上匀速行驶,门窗紧闭的车厢内有一人向上跳起,发现仍落回车上原处,这 是因为 () A .人跳起后,车厢内空气给他以向前的力,带着他随同火车一起向前运动 B .人跳起的瞬间,车厢地板给他一个向前的力,推动他随同火车一起向前运动 C .人跳起后,车在继续向前运动,所以人落下后必定偏后一些,只是由于时间很短, 偏后距离太小,不明显而已 D .人跳起后直到落地,在水平方向上人和车始终有相同的速度 9.人站在地面上,先将两腿弯曲,再用力蹬地,就能跳离地面,人能跳起离开地面的原因是 () A .人对地球的作用力大于地球对人的引力 B .地面对人的作用力大于人对地面的作用力 图1 第一章实验数据误差分析与数据处理 第一节实验数据误差分析 一、概述 由于实验方法和实验设备的不完善,周围环境的影响,以及人的观察力,测量程序等限制,实验测量值和真值之间,总是存在一定的差异,在数值上即表现为误差。为了提高实验的精度,缩小实验观测值和真值之间的差值,需要对实验数据误差进行分析和讨论。 实验数据误差分析并不是即成事实的消极措施,而是给研究人员提供参与科学实验的积极武器,通过误差分析,可以认清误差的来源及影响,使我们有可能预先确定导致实验总误差的最大组成因素,并设法排除数据中所包含的无效成分,进一步改进实验方案。实验误差分析也提醒我们注意主要误差来源,精心操作,使研究的准确度得以提高。 二、实验误差的来源 实验误差从总体上讲有实验装置(包括标准器具、仪器仪表等)、实验方法、实验环境、实验人员和被测量五个来源。 1.实验装置误差 测量装置是标准器具、仪器仪表和辅助设备的总体。实验装置误差是指由测量装置产生的测量误差。它来源于: (1)标准器具误差 标准器具是指用以复现量值的计量器具。由于加工的限制,标准器复现的量值单位是有误差的。例如,标准刻线米尺的0刻线和1 000 mm刻线之间的实际长度与1 000 mm单位是有差异的。又如,标称值为 1kg的砝码的实际质量(真值)并不等于1kg等等。 (2)仪器仪表误差 凡是用于被测量和复现计量单位的标准量进行比较的设备,称为仪器或仪表.它们将被测量转换成可直接观察的指示值。例如,温度计、电流表、压力表、干涉仪、天平,等等。 由于仪器仪表在加工、装配和调试中,不可避免地存在误差,以致仪器仪表的指示值不等于被测量的真值,造成测量误差。例如,天平的两臂不可能加工、调整到绝对相等,称量时,按天平工作原理,天平平衡被认为两边的质量相等。但是,由于天平的不等臂,虽然天平达到平衡,但两边的质量并不等,即造成测量误差。 (3)附件误差 为测量创造必要条件或使测量方便地进行而采用的各种辅助设备或附件,均属测量附件。如电测量中的转换开关及移动测点、电源、热源和连接导线等均为测量附件,且均产生测量误差。又如,热工计量用的水槽,作为温度测量附件,提供测量水银温度计所需要的温场,由于水槽内各处温度的不均匀,便引起测量误差,等等。 按装置误差具体形成原因,可分为结构性的装置误差、调整性的装置误差和变化性的装置误差。结构性的装置误差如:天平的不等臂,线纹尺刻线不均匀,量块工作面的不平行性,光学零件的光学性能缺陷,等等。这些误差大部分是由于制造工艺不完善和长期使用磨损引起的。调整性的装置误差如投影仪物镜放大倍数调整不准确,水平仪的零位调整不准确,千分尺的零位调整不准确,等等。这些误差是由于仪器仪表在使用时,未调整到理想状态引起的。变化性的装置误差如:激光波长的长期不稳定性,电阻等元器件的老化,晶体振荡器频率的长期漂移,等等。这些误差是由于仪器仪表随时间的不稳定性和随空间位置变化的不均匀性造成的。 2.环境误差 环境误差系指测量中由于各种环境因素造成的测量误差。 被测量在不同的环境中测量,其结果是不同的。这一客观事实说明,环境对测量是有影响的,是测量的误差来源之一。环境造成测量误差的主要原因是测量装置包括标准器具、仪器仪表、测量附件同被测对象随着环境的变化而变化着。 测量环境除了偏离标准环境产生测量误差以外,从而引起测量环境微观变化的测量误差。 3.方法误差 《误差理论与数据处理》 第一章绪论 1-1.研究误差的意义是什么?简述误差理论的主要内容。 答:研究误差的意义为: (1)正确认识误差的性质,分析误差产生的原因,以消除或减小误差; (2)正确处理测量和实验数据,合理计算所得结果,以便在一定条件下得到更接近于 真值的数据; (3)正确组织实验过程,合理设计仪器或选用仪器和测量方法,以便在最经济条件下, 得到理想的结果。 误差理论的主要内容:误差定义、误差来源及误差分类等。 1-2.试述测量误差的定义及分类,不同种类误差的特点是什么? 答:测量误差就是测的值与被测量的真值之间的差;按照误差的特点和性质,可分为系统误差、随机误差、粗大误差。 系统误差的特点是在所处测量条件下,误差的绝对值和符号保持恒定,或遵循一定的规律变化(大小和符号都按一定规律变化); 随机误差的特点是在所处测量条件下,误差的绝对值和符号以不可预定方式变化; 粗大误差的特点是可取性。 1-3.试述误差的绝对值和绝对误差有何异同,并举例说明。 答:(1)误差的绝对值都是正数,只是说实际尺寸和标准尺寸差别的大小数量,不反映是“大了”还是“小了”,只是差别量; 绝对误差即可能是正值也可能是负值,指的是实际尺寸和标准尺寸的差值。+多少表明大了多少,-多少表示小了多少。 (2)就测量而言,前者是指系统的误差未定但标准值确定的,后者是指系统本身标准值未定 1-5 测得某三角块的三个角度之和为180o 00’02”,试求测量的绝对误差和相对误差 解: 绝对误差等于: 相对误差等于: 1-6.在万能测长仪上,测量某一被测件的长度为 50mm ,已知其最大绝对误差为 1μm ,试问该被测件的真实长度为多少? 解: 绝对误差=测得值-真值,即: △L =L -L 0 已知:L =50,△L =1μm =0.001mm , 测件的真实长度L0=L -△L =50-0.001=49.999(mm ) 1-7.用二等标准活塞压力计测量某压力得 100.2Pa ,该压力用更准确的办法测得为100.5Pa ,问二等标准活塞压力计测量值的误差为多少? 21802000180''=-'''o o %000031.010*********.00 648002066018021802≈=''''''??''=''=o 牛顿运动定律单元练习题2 一、选择题:(不定项) 1、关于作用力与反作用力,下面说法中正确的是( D ) A .物体相互作用时,先有作用力,后有反作用力 B .作用力与反作用力大小相等,方向相反,作用在同一直线上,因此这二力平衡 C .作用力与反作用力可以是不同性质的力,例如作用力是重力,它的反作用力可能是弹力 D .作用力和反作用力总是同时分别作用在相互作用的两个物体上 2、用弹簧拉着木块在水平面上做匀速直线运动,弹簧拉木块的力与木块拉弹簧的力是( AC ) A .一对作用力和反作用力 B .一对平衡力 C .大小相等,方向相反,作用在一条直线上 D .大小相等,方向相反,作用在同一物体上 3、如图所示,一个大人(甲)跟一个小孩(乙)站在水平地面上手拉手比力气,结果大人把小孩拉过来了.对这个过程中作用于双方的力的关系,不正确的说法是(AD ) A.大人拉小孩的力一定比小孩拉大人的力大 B.大人与小孩间的拉力是一对作用力与反作用力 C.大人拉小孩的力与小孩拉大人的力大小一定相等 D.只有在大人把小孩拉动的过程中,大人的力才比小孩的力大,在可能出现的短暂相持过程中,两人的拉力一样大 4、一质点当分别受到下列几组大小已知的共点力作用时,一定能使质点产生加速度的是(C ) A .25N ,15N ,40N B .10N ,15N ,20N C .10N ,20N ,40N D .2N ,4N ,6N 5、放在粗糙水平桌面上的物体质量为 m ,在水平推力F 作用下产生的加速度为 a ,若将水平推力增大为2F ,物体产生的加速度应是( C ) A 、a B 、等于2a C 、大于 2 a D 、 小于2 a 6、如图所示,在水平粗糙的桌面上,有两个长方体A 、B ,F 是推力( CD ) A 、A 、、 B 静止时,A 、B 间一定存在弹力 B 、A 、B 静止时,A 、B 间一定不存在弹力 C 、A 、B 一起向右匀速运动时,A 、B 间一定存在弹力 D 、A 、B 一起向右加速运动时,A 、B 间一定存在弹力 7、如图所示,两物体A 和B ,质量分别为m 1和m 2,互相接触放在光滑的水平面上,对物体A 施以水平的推力F ,则物体A 对物体B 的作用力等于(B ) A .F m m m 211 + B .F m m m 212+ C .F D .F m m 12 8、一物体受绳的拉力作用由静止开始前进,先做加速运动,然后改为匀速运动;再改为做减速运动,则下列说法中正确的是(D ) A.加速前进时,绳拉物体的力大于物体拉绳的力 B.减速前进时,绳拉物体的力小于物体拉绳的力 C.只有匀速前进时,绳拉物体的力与物体拉绳的力大小才相等 D.不管物体如何前进,绳拉物体的力与物体拉绳的力大小总相等 误差和分析数据处理 1 数据的准确度和精度 在任何一项分析工作中,我们都可以看到用同一个分析方法,测定同一个样品,虽然经过多少次测定,但是测 定结果总不会是完全一样。这说明在测定中有误差。为此 我们必须了解误差产生的原因及其表示方法,尽可能将误 差减到最小,以提高分析结果的准确度。 1.1 真实值、平均值与中位数 (一)真实值 真值是指某物理量客观存在的确定值。通常一个物理量的真值是不知道的,是我们努力要求测到的。严格来讲,由于测量仪器,测定方法、环境、人的观察力、测量的程 序等,都不可能是完善无缺的,故真值是无法测得的,是 一个理想值。科学实验中真值的定义是:设在测量中观察 的次数为无限多,则根据误差分布定律正负误差出现的机 率相等,故将各观察值相加,加以平均,在无系统误差情 况下,可能获得极近于真值的数值。故“真值”在现实中 是指观察次数无限多时,所求得的平均值(或是写入文献 手册中所谓的“公认值”)。 (二)平均值 然而对我们工程实验而言,观察的次数都是有限的, 故用有限观察次数求出的平均值,只能是近似真值,或称 为最佳值。一般我们称这一最佳值为平均值。常用的平均 值有下列几种: (1)算术平均值 这种平均值最常用。凡测量值的分布服从正态分布 时,用最小二乘法原理可以证明:在一组等精度的测量中, 算术平均值为最佳值或最可信赖值。 n x n x x x x n i i n ∑=++==121 式中: n x x x 21、——各次观测值;n ――观察的次数。 (2)均方根平均值 n x n x x x x n i i n ∑=++==1222221 均 (3)加权平均值 设对同一物理量用不同方法去测定,或对同一物理量 由不同人去测定,计算平均值时,常对比较可靠的数值予 以加重平均,称为加权平均。 ∑∑=++++++===n i i n i i i n n n w x w w w w x w x w x w w 11212211 式中;n x x x 21、——各次观测值; n w w w 21、——各测量值的对应权重。各观测值的 机械类常用英语词汇大全一字螺丝批slot type screwdriver 一点透视one-point perspective 二画 二合一黏合剂epoxy resin adhesive 二合胶;混合胶epoxy glue 二维的;平面的two-dimensional 二进制binary 二极管;整流子diode 二号螺丝攻second tap 二路开关two-way switch 十进制的;公制的metric 人工制品artefact 人造板man-made board 人体工程学ergonomics; human engineering 人体尺寸human dimension 人体测量学anthropometry; anthropometrics 刀片blade 刀身blade 刀具tool 刀具溜座carriage 刀柱tool post 刀架tool rest 刀架底座tool rest bracket 刀座帷;床鞍apron 刀座鞍;溜板座saddle 力force 力三角形triangle of force 力平行四边形parallelogram of force 力多边形;多边形力学polygon of force 力的分解force resolution 力架;亮漆lacquer 力矩moment 力偶couple 力矩定律law of moment 力-距离图表force-distance graph 力图force diagram 力线line of force 力点effort 十字榫cross halving joint 十字螺丝Philip's head screw 十字螺丝批Philip's type screwdriver 丁字尺;T 尺tee square 三画 三爪夹头three-jaw chuck 三角尺set square 三角形结构系杆triangulation tie 三角锉triangular file 三维的;立体的three-dimensional 三氯甲烷;哥罗芳chloroform 三聚氰 胺;蜜胺melamine 三点透视three-point perspective 上油漆painting 上釉enamelling 凡立水varnish 叉形顶尖fork centre 口罩mask 士力;虫漆shellac 士巴拿;扳手spanner 大芯夹板;宽条芯夹板blockboard; solid corestock-laminated board 大量制造mass production 子口刨;槽口刨;边刨rebate plane 小型平槽刨miniature router plane 小型线料弯曲器small wire bender 小型弯折机mini bender 小型电路断路器;跳菲miniature circuit breaker (MCB) 小齿轮pinion 山樟San Cheong 工件workpiece 工字梁I beam 工作面working surface 工作图;制作图working drawing 工作台bench; working table 工具tool 工具贮存室tool storage 工具槽well 工具钢tool steel 工场workshop 工场安全workshop safety 工程字书写技巧lettering 工程系统engineering system 误差分析与数据处理 一.填空题 1. ______(3S或莱以特)准则是最常用也是最简单的判别粗大误差的准则。 2. 随机误差的合成可按标准差和______(极限误差)两种方式进行。 3. 在相同测量条件下,对同一被测量进行连续多次测量所得结果之间的一致性称为 ______(重复)性。 4. 在改变了的测量条件下,同一被测量的测量结果之间的一致性称为______(重现)性。 5. 测量准确度是指测量结果与被测量______(真值)之间的一致程度。 6. 根据测量条件是否发生变化分类,可分为等权测量和______(不等权)测量。 7. 根据被测量对象在测量过程中所处的状态分分类,可分为静态测量和_____(动态) 测量。 8. 根据对测量结果的要求分类,可分为工程测量和_____(精密)测量。 9. 真值可分为理论真值和____(约定)真值。 10. 反正弦分布的特点是该随机误差与某一角度成_____(正弦)关系。 11. 在相同条件下,对同一物理量进行多次测量时,误差的大小和正负总保持不变,或按一定的规律变化,或是有规律地重复。这种误差称为______(系统误差)。 12. 在相同条件下,对某一物理量进行多次测量时,每次测量的结果有差异,其差异的大小和符号以不可预定的方式变化着。这种误差称为______(偶然误差或随机误差)。 13. 系统误差主要来自仪器误差、________(方法误差)、人员误差三方面。 14. 仪器误差主要包括_________(示值误差)、零值误差、仪器机构和附件误差。 15. 方法误差是由于实验理论、实验方法或_________(实验条件)不合要求而引起的误差。 16. 精密度高是指在多次测量中,数据的离散性小,_________(随机)误差小。 17. 准确度高是指多次测量中,数据的平均值偏离真值的程度小,_________(系统)误差小。 18. 精确度高是指在多次测量中,数据比较集中,且逼近真值,即测量结果中的 _________(系统)误差和_________(随机)误差都比较小。 19. 用代数方法与未修正测量结果相加,以补偿其系统误差的值称为_____(修正值)。 20. 标准偏差的大小表征了随机误差的_____(分散)程度。 21. 偏态系数描述了测量总体及其误差分布的_____(非对称)程度。 22. 协方差表示了两变量间的_____(相关)程度。 23. 超出在规定条件下预期的误差称为_____(粗大)误差。 24. +=_____() 25. ++=_____() 26. () 28. pH=的有效数字是____(2)位。 29. 保留三位有效数字,结果为____。 30. 为补偿系统误差而与未修正测量结果相乘的数字因子称为______(修正因子)。 一、检定一只5mA、级电流表的误差。按规定,要求所使用的标准仪器产生的误差不大于受检仪器允许误差的1/3。现有下列3 只标准电流表,问选用哪一只最为合适,为什么? (本题10 分) (1)15mA级(2)10mA级(3)15mA级 C单元牛顿运动定律 C1 牛顿第一定律、牛顿第三定律 14.C1[2012·课标全国卷] 伽利略根据小球在斜面上运动的实验和理想实验,提出了惯性的概念,从而奠定了牛顿力学的基础.早期物理学家关于惯性有下列说法,其中正确的是() A.物体抵抗运动状态变化的性质是惯性 B.没有力的作用,物体只能处于静止状态 C.行星在圆周轨道上保持匀速率运动的性质是惯性 D.运动物体如果没有受到力的作用,将继续以同一速度沿同一直线运动 14.AD[解析] 惯性是物体抵抗运动状态变化而保持静止或匀速直线运动状态的性质,A正确;没有力的作用,物体将处于静止或匀速直线运动状态,B错误;行星在圆形轨道上保持匀速率运动的原因是行星受到地球的万有引力作用,不是由于惯性,C错误;运动物体如果没有受到力的作用,将一直匀速直线运动下去,D正确. C2 牛顿第二定律单位制 21.C2、D1、E2[2012·福建卷] 如图,用跨过光滑定滑轮的缆绳将海面上一艘失去动力的小船沿直线拖向岸边.已知拖动缆绳的电动机功率恒为P,小船的质量为m,小船受到的阻力大小恒为f,经过A点时的速度大小为v0,小船从A点沿直线加速运动到B点经历时间为t1,A、B两点间距离为d (1)小船从A点运动到B f (2)小船经过B点时的速度大小v1; (3)小船经过B点时的加速度大小a. 21.[解析] (1)小船从A点运动到B点克服阻力做功 W f=fd① (2)小船从A点运动到B点,电动机牵引绳对小船做功 W=Pt1② 由动能定理有 W-W f=1 2m v21- 1 2m v20③ 由①②③式解得v1=v20+2 m(Pt1-fd)④ (3)设小船经过B点时绳的拉力大小为F,绳与水平方向夹角为θ,电动机牵引绳的速度大小为u,则 P=Fu⑤ u=v1cosθ⑥ 由牛顿第二定律有 F cosθ-f=ma⑦ 由④⑤⑥⑦式解得 a= P m2v20+2m(Pt1-fd) - f m 17.C2[2012·安徽卷] 如图4a沿斜面匀加速下 滑,若在物块上再施加一个竖直向下的恒力F 图4 则() 误差分析和数据处理 误差和分析数据处理 1 数据的准确度和精度 在任何一项分析工作中,我们都可以看到用同一个分析方法,测定同一个样品,虽然经过多 少次测定,但是测定结果总不会是完全一样。这 说明在测定中有误差。为此我们必须了解误差产 生的原因及其表示方法,尽可能将误差减到最 小,以提高分析结果的准确度。 1.1 真实值、平均值与中位数 (一)真实值 真值是指某物理量客观存在的确定值。通常一个物理量的真值是不知道的,是我们努力要求 测到的。严格来讲,由于测量仪器,测定方法、 环境、人的观察力、测量的程序等,都不可能是 完善无缺的,故真值是无法测得的,是一个理想 值。科学实验中真值的定义是:设在测量中观察 的次数为无限多,则根据误差分布定律正负误差 出现的机率相等,故将各观察值相加,加以平均, 在无系统误差情况下,可能获得极近于真值的数 值。故“真值”在现实中是指观察次数无限多时, 所求得的平均值(或是写入文献手册中所谓的 “公认值”)。 (二)平均值 然而对我们工程实验而言,观察的次数都是 有限的,故用有限观察次数求出的平均值,只能 是近似真值,或称为最佳值。一般我们称这一最 佳值为平均值。常用的平均值有下列几种: (1)算术平均值 这种平均值最常用。凡测量值的分布服从正 态分布时,用最小二乘法原理可以证明:在一组 等精度的测量中,算术平均值为最佳值或最可信 赖值。 n x n x x x x n i i n ∑=++==121 式中: n x x x 21、——各次观测值;n ――观察 的次数。 (2)均方根平均值 n x n x x x x n i i n ∑=++==12 22221 均 (3)加权平均值 设对同一物理量用不同方法去测定,或对同 一物理量由不同人去测定,计算平均值时,常对 比较可靠的数值予以加重平均,称为加权平均。 2014航班讲义牛顿运动定律(一) 1、如图所示,C为一放在固定的粗糙水平桌面上的斜面,其质量m C=6.5kg,顶端有一定滑轮,滑轮的质量及轴处的摩擦皆可不计。A和B是两个滑块,质量分别为m A=3.0kg,m B= 0,5kg,由跨过定滑轮的不可伸长的轻绳相连,开始时设法抓住A,B和C,使它们都处于静止状态,且滑轮两边的轻绳恰好伸直,今用一大小等于26.5N的水平推力F作用于C,并同时释放A,B和C.若C沿桌面向左滑行,其加速度 a=3.0m/s2,B相对桌面无水平方向位移(绳子是一直绷紧的).试求与桌面的摩擦系数μ (图中α = 37°,β = 53°,重力加速度 g = 10m/s2) 2.如图所示,一个长为2l的竖硬滑槽AB,沿竖直面滑下,在滑槽的中点安放 一个相对滑槽固定不动的小球C,其质量为m,B端向右以速度v匀速运动. 试求当α = 45°角时,小球对滑动槽的作用力. 3.如图所示,一个圆柱体和一个楔子,互相触及地沿着两个与地面成 相等夹角α的固定斜面作无摩擦的移动.圆柱体质量为m1,楔子的质 量为m2 .试求楔子对圆柱体的压力. 4.如图所示,质量为M的劈和质量为m的杆,在施加于劈上的水平力 F作用下,分别以加速度a1和a2做无摩擦运动,劈的倾角为α.求加 速度a1和a2以及劈与杆的作用力N. 5.如图, 一三角形楔ABC置于光滑水平面上,两斜边与平面夹角分别为 300,600,在斜边上有两物体m1,m2,用不可伸长的细绳联接并跨在楔顶点A上的一定滑轮上,m1,m2可在斜面上无摩擦地滑动.令楔的质量为M,已知三物体的质量之比为 m1:m2:M= 4:1: 1 6.滑轮光滑且质量可忽略.求(1)楔的加速度a及m1对于M的加速度a'. (2)若m1从静止开始沿斜面移动20cm,楔沿水平面移动的距离. 6. 在火车车厢内有一长l,倾角为θ的斜面,当车厢以恒定加速度 a0从静止幵始运动时,物体自倾角为θ的斜面顶部A点由静止开始下 滑,已知斜面的静摩擦因数为μ。求物体滑至斜面底部B点时,物体 相对于车厢的速度,并讨论当a0与μ一定时,倾角θ为多少时,物体 可静止于A点? 《误差理论与数据处理》 第一章 绪论 1-1.研究误差的意义是什么简述误差理论的主要内容。 答: 研究误差的意义为: (1)正确认识误差的性质,分析误差产生的原因,以消除或减小误差; (2)正确处理测量和实验数据,合理计算所得结果,以便在一定条件下得到更接近于真值的数据; (3)正确组织实验过程,合理设计仪器或选用仪器和测量方法,以便在最经济条件下,得到理想的结果。 误差理论的主要内容:误差定义、误差来源及误差分类等。 1-2.试述测量误差的定义及分类,不同种类误差的特点是什么 答:测量误差就是测的值与被测量的真值之间的差;按照误差的特点和性质,可分为系统误差、随机误差、粗大误差。 系统误差的特点是在所处测量条件下,误差的绝对值和符号保持恒定,或遵循一定的规律变化(大小和符号都按一定规律变化); 随机误差的特点是在所处测量条件下,误差的绝对值和符号以不可预定方式变化; 粗大误差的特点是可取性。 1-3.试述误差的绝对值和绝对误差有何异同,并举例说明。 答:(1)误差的绝对值都是正数,只是说实际尺寸和标准尺寸差别的大小数量,不反映是“大了”还是“小了”,只是差别量; 绝对误差即可能是正值也可能是负值,指的是实际尺寸和标准尺寸的差值。+多少表明大了多少,-多少表示小了多少。 (2)就测量而言,前者是指系统的误差未定但标准值确定的,后者是指系统本身标准值未定 1-5 测得某三角块的三个角度之和为180o 00’02”,试求测量的绝对误差和相对误差 解: 绝对误差等于: 相对误差等于: 1-6.在万能测长仪上,测量某一被测件的长度为 50mm ,已知其最大绝对误差为 1μm ,试问该被测件的真实长度为多少 解: 绝对误差=测得值-真值,即: △L =L -L 0 已知:L =50,△L =1μm =0.001mm , 测件的真实长度L0=L -△L =50-0.001=49.999(mm ) 1-7.用二等标准活塞压力计测量某压力得 100.2Pa ,该压力用更准确的办法测得为100.5Pa ,问二等标准活塞压力计测量值的误差为多少 解:在实际检定中,常把高一等级精度的仪器所测得的量值当作实际值。 故二等标准活塞压力计测量值的误差=测得值-实际值, 即: 100.2-100.5=-0.3( Pa ) 1-8在测量某一长度时,读数值为2.31m ,其最大绝对误差为20m μ,试求其最大相对误差。 1-9、解: 由2122 4()h h g T π+=,得 21802000180''=-'''o o %000031.010*********.00648002066018021802≈=' '' '''??''=''=o误差理论与数据处理简答题及答案
人教版物理必修一试题《牛顿运动定律》单元检测A
实验大数据误差分析报告与大数据处理
误差理论与数据处理答案
第四章 牛顿运动定律单元练习题2(新课标必修一)
误差分析和数据处理
机械五金类常用英语词汇大全
误差理论与数据处理试题范文
C单元 牛顿运动定律
误差分析和数据处理
牛顿运动定律(竞赛学生版)
误差理论与数据处理》答案
相关主题
文本预览