
第八章分析菜单
§1 导言(Introduction)
这一章将详细介绍ZEMAX种的所有分析功能。分析镜头数据的曲线和文本通常包括像差、MTF、点列图、以及其他的计算结果。程序修改镜头数据和处理其它数据(如玻璃数据库)的特性将在工具菜单“Tools Menu” 一章中讲述。
选择了一个菜单选项立刻执行一个需要的计算。一旦曲线和文本窗口被显示,可以用选择设置菜单选项来修改缺省设置。一旦你已经作了适当的改变,敲击“OK”,程序将重新计算和显示当前窗口种的数据。如果你要在曲线和文本数据显示前改变设置,在File:Environment:Graphics 中使用“Show Options First”选项框。
在设置窗口中的“OK”,“Cancel”,“Save”,“Load”,“Reset”和“Help”的功能参见用户界面一章。
每个分析窗口都有一个“Updata”菜单项。更新功能会强迫ZEMAX重新计算和重新显示当前窗口中的数据。当镜头数据改变和当前显示的曲线不能用时,这个功能是很有用的。在窗口双击会执行与选择更新选项相同的功能。敲击鼠标右键与敲击“Setting”相等。
还有许多信息参见用户界面一章。
§2 外形图(Layout)
二维外形图(2D Layout)
目的:
通过镜头YZ截面的外形曲线。
设置:
说明:
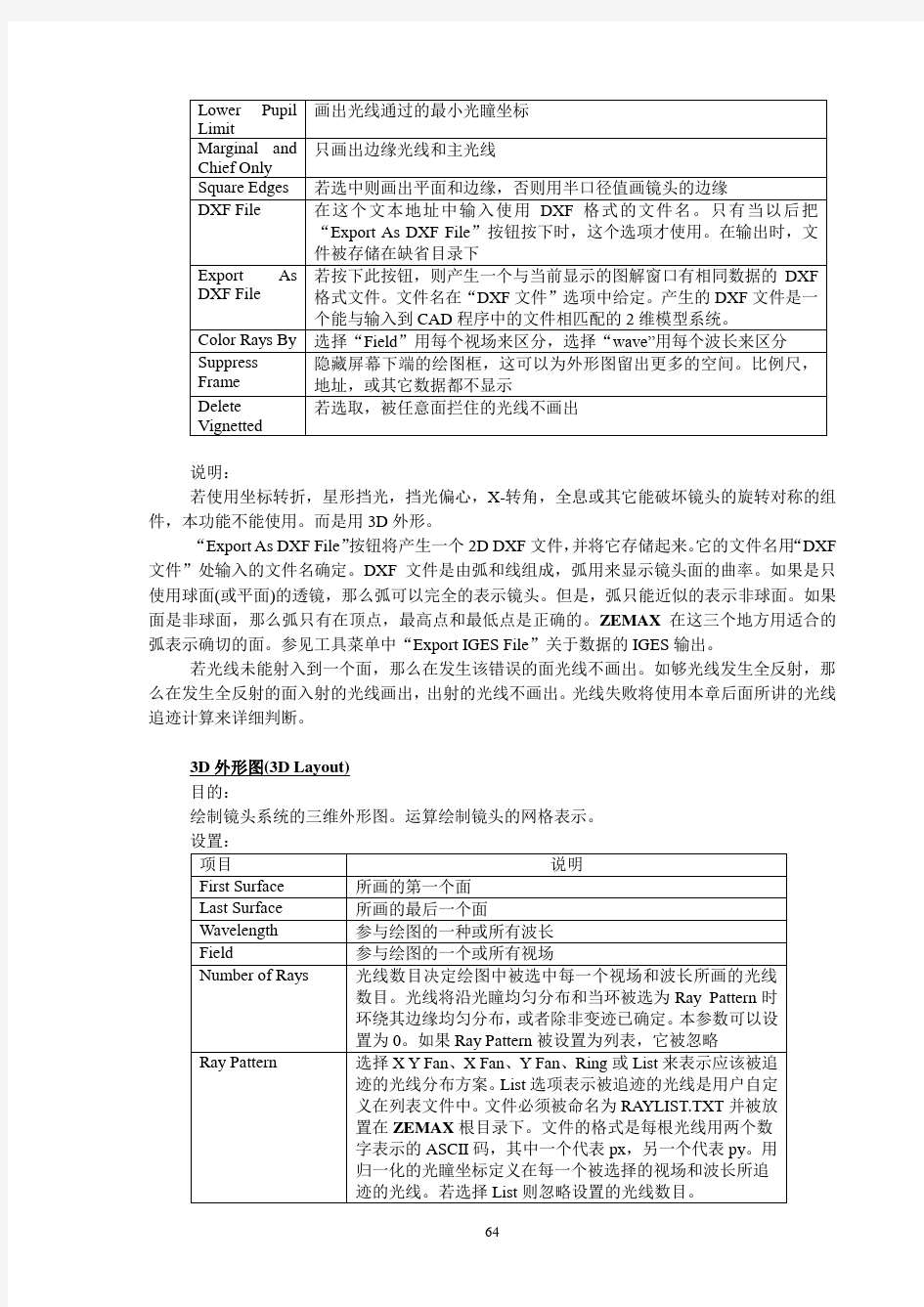
若使用坐标转折,星形挡光,挡光偏心,X-转角,全息或其它能破坏镜头的旋转对称的组件,本功能不能使用。而是用3D外形。
“Export As DXF File”按钮将产生一个2D DXF文件,并将它存储起来。它的文件名用“DXF 文件”处输入的文件名确定。DXF文件是由弧和线组成,弧用来显示镜头面的曲率。如果是只使用球面(或平面)的透镜,那么弧可以完全的表示镜头。但是,弧只能近似的表示非球面。如果面是非球面,那么弧只有在顶点,最高点和最低点是正确的。ZEMAX在这三个地方用适合的弧表示确切的面。参见工具菜单中“Export IGES File”关于数据的IGES输出。
若光线未能射入到一个面,那么在发生该错误的面光线不画出。如够光线发生全反射,那么在发生全反射的面入射的光线画出,出射的光线不画出。光线失败将使用本章后面所讲的光线追迹计算来详细判断。
3D外形图(3D Layout)
目的:
绘制镜头系统的三维外形图。运算绘制镜头的网格表示。
说明:
按left,right,up,down,Page Up,Page Down键会使显示的图形旋转到不同的透视位置。
若光线在某一面上发生光线溢出,则该面光线不画出,如果光线发生全反射,那么在发生全反射的面射入的光线画出,射出的光线不画。光线溢出与否将使用本章后面所讲的光线追迹计算来详细判断。
当画所有的变焦位置时,在每个变焦位置x,y,z的方向独立的加上偏离量。若需要,偏离量可以都为0。若所有的偏离量都为0,那么所有的变焦位置是重叠的;否则,各变焦位置之间用确定的数值相互分隔,以便区别。注意,所有的偏离量都是相对于参考面的位置定义的。参考面在系统中的Advaced对话框中定义。若所有的偏离量都是0,多重变焦位置在参考面处是重叠的。
立体模型(Solid Model)
目的:
绘制以隐藏线代表镜头的立体图。
设置:
本选项和3D外形图中所得到的选项相类似,但“Hide Lens Edges”和“Hide X Bars”控件不再有,几个新的控件描述如下:
说明:
立体模型算法将镜头描述为一个多面体的集合。观察不到的线和面被消去,显示镜头的立体外形。本运算比其它外形图慢,但能产生最佳视觉效果。显示镜头元件的面的数目可以用径向或角向分割数段选项来修改。
“Export As DXF File”按钮将产生一个3D DXF文件并将它存储在“DXF文件”处输入文件名的文件中。DXF文件是由3D方向上的小面组成。这些小面用来显示镜片面的弯曲形状。然而这些面是表面轮廓被切割细分后的近似,所以它几乎是平的。但小面的边角都和实际光学面重合,而面内的任意点并不能与光学表面的轮廓线相一致。ZEMAX在每个小面的边角处用精确的光学面的矢高来来定义面形状。
按left,right,up,down,Page Up,Page Down键会使显示的图形转动以产生不同的透视效果。
若某一面上发生光线溢出,则该面的光线不画出,如果光线发生全反射,那么在发生全反射的面射入的光线画出,射出的光线不画。光线溢出与否将使用本章后面所讲的光线追迹计算来详细判断。
网格图(Wireframe)
目的:
画出表示镜头的网格图。
设置:
本设置与在立体模型中的设置是相同的,包括对DXF文件的支持。
说明:
除了被隐藏的线不消去外,网格模型与立体模型几乎是相同的。用网格图表示时,会使屏幕由于线多而变得混乱。可以用“Hide Lens Faces”使显示变得清晰。本显示的优点是速度,它的生成比立体模型快得多。
若某一面上发生光线溢出,则该面的光线不画出,如果光线发生全反射,那么在发生全反射的面射入的光线画出,射出的光线不画。光线溢出与否将使用本章后面所讲的光线追迹计算来详细判断。
阴影图(Shaded Model)
目的:
用OpenGL图画表示镜头的带阴影的立体模型。
设置:
除了能设置亮度和背景色外,本选项与在立体模型中的设置是相同的。
画元件图(Element Drawing)
目的:
本功能能自动创建供光学车间生产使用的表面,单透镜或双胶合透镜的图纸。
设置:
说明:
元件图的设置通过按“Save”按钮被保存在专门的镜头文件中。与多数的分析功能不同。元件图功能可以将每个面的所有设置分别保存。例如,面1的注释和公差可以被保存,然后面3的注释和公差也被输入和保存。若要将该设置赋予某一个特定的面,只要将面序号改为所需要的面号,按“Load”按钮就可以了。若与先前保存的面匹配,则将显示先前面的设置。本功能使重新产生多组元光学系统的复杂图形变得容易了。
画元件图功能的重要特性是它能装载不同的注释文件并把它们放在图形中。缺省注释文件“DEFAULT.NOT”是一套普通的很少使用的注释。但是用户可以修改注释文件(它们是ASCII码文件,word处理器或文本编辑器都可以修改)并把它们用不同的名字存储。例如,你可以为你设计的每一个光学部件建立一个.NOT文件,当元件图产生时装载适合的注释文件。
注释文件注释行从数字2开始。注释行1被ZEMAX保留给行“1)All dimensions in millimeters”或当前镜头的单位,注释文件中的分行和空格在元件图中被严格复制。
一旦新零件图产生或“Reset”按钮被按下,缺省设置将重新产生。缺省公差从公差数据编辑器中获得。min/max公差范围中的最大值使用缺省。例如,若TTHI厚度公差为-.03,+.05,公差值将为0.05。这里只考虑TTHI,TRAD,和TIRR公差。若不能产生一个适合的缺省值,公差设置为0。注意所有的公差都是文本;可以按需要进行编辑。
当用检测样板检查零件的牛顿圈(光圈)时,半径公差和用干涉条纹表示的光焦度之间的简便
的转换公式为:
22
#R
R fringes λρ?= 这里ΔR 是半径误差,λ是测试波长,ρ是径向口径,R 是曲率半径。此公式可以近似用于小曲率。其它信息参见Malacara ,Optical Shop Testing ,J .Wiley&Sons ,Inc .(《光学车间检测》一书)
§3 特性曲线(Fans)
光线像差(Ray Aberration)
目的:
显示作为光瞳坐标函数的光线像差。
设置:
说明:
横向特性曲线是用光线的光瞳的y 坐标的函数表示的横向光线像差的x 或y 分量。缺省选项是画出像差的y 分量曲线。但是由于横向像差是矢量,它不能完整的描述像差。 当ZEMAX 绘制y 分量时,曲线标称为EY , 当绘制x 分量时,曲线标称为EX 。
垂轴刻度在图形的下端给出。 绘图的数据是光线坐标和主光线坐标之差。横向特性曲线是以光瞳的y 坐标作为函数,绘制光线和像平面的交点的x 或y 坐标和主波长的主光线x 或y 坐标的差。 弧矢特性曲线是以光瞳的x 坐标作为函数,绘制光线和像平面的交点的x 或y 坐标和主波长的主光线x 或y 坐标的差。 每个曲线图的横向刻度是归一化的入瞳坐标PX 或PY 。
若显示所有波长,那么图形参考主波长的主光线。若选择单色光那么被选择的波长的主光线被参照。由于这个原因,在单色光和多色光切换显示时,非主波长的数据通常被改变。
因为像差是有x和y分量的矢量,光线像差曲线不能完全描述像差,特别是像平面倾斜或者系统是非旋转对称时。另外,像差曲线仅仅表示了通过光瞳的两个切面的状况,而不是整个光瞳。像差曲线图的主要目的是判断系统中有哪种像差,它并不是系统性能的全面描述,尤其系统是非旋转对称时。
光程(Optical Path)
目的:
显示用光瞳坐标函数表示的光程差。
设置:
除了由于OPD是标量,“Tan Fan”和“Sag Fan”选项只能是OPD之外,本选项与光线像差曲线是相同的。
说明:
垂轴刻度在图形的下端给出。绘图的数据是光程差(OPD),它是光线的光程和主光线的光程的差,通常,计算以返回到系统出瞳上的光程差为参考。每个曲线的横向刻度是归一化的入瞳坐标。
若显示所有波长,那么图形以主波长的参考球面和主光线为参照基准的。若选择单色光那么被选择的波长的参考球面和主光线被参照。由于这个原因,在单色光和多色光切换显示时,非主波长的数据通常被改变。
光瞳像差(Pupil Abberation)
目的:
显示用光瞳坐标函数表示的入瞳变形。
设置:
除了由于光瞳像差是标量,“Tan Fan”和“Sag Fan”选项只能是OPD之外,本选项与光线像差曲线是相同的。
说明:
入瞳像差是实际光线在光栏面的交点和主波长近轴光线交点的差在近轴光栏半径所占的百分比来定义的。若最大像差超过一定的百分比,就得用光线定位(参见“系统菜单”一章) ,以便在校正物空间的光线使它正确地充满光栏面。若光线定位选择被打开,入瞳像差将为零(或剩下很小的值),因为变形被光线追迹算法补偿了。可以利用这一点来检查光线定位是否正确。这里所用的光瞳像差的定义并不是追求其完整性和与其它定义的一致性。本功能的唯一目的是为是否需要光线定位提供依据。
§4 点列图(Spot Diagram)
标准(Standard)
目的:
显示点列图。
设置:
说明:
光线密度有一个依据视场数目,规定的波长数目和可利用的内存的最大值。离焦点列图将追迹标准点列图最大值光线数目的一半光线。
列在曲线上的每个视场点的GEO点尺寸是参考点(参考点可以是主波长的主光线,所有被追迹的光线的重心,或点集的中点)到距离参考点最远的光线的距离。换句话将,GEO点尺寸
是由包围了所有光线交点的以参考点为中心的圆的半径。
RMS点尺寸是径向尺寸的均方根。先把每条光线和参考点之间的距离的平方,求出所有光线的平均值,然后取平方根。点列图的RMS尺寸取决于每一根光线,因而它给出光线扩散的粗略概念。GEO点尺寸只给出距离参考点最远的光线的信息。
艾利圆环的半径是1.22乘以主波长乘以系统的F# ,它通常依赖于视场的位置和光瞳的方向。对于均匀照射的环形入瞳,这是艾利圆环的第一个暗环的半径。艾利圆环可以被随意的绘制来给出图形比例。例如,如果所有的光线都在艾利圆环内,那么系统被认为处于衍射极限状态。若RMS尺寸大于空心环尺寸,那么系统不是衍射极限。衍射极限特性的域值依赖于判别式的使用。系统是否成为衍射极限并没有绝对的界限。若系统没有均匀照射或用渐晕来除去一些光线,艾利圆不能精确地表示衍射环的形状或大小。
在点列图中,ZEMAX不能画出拦住的光线,它们也不能被用来计算RMS或GEO点尺寸。
ZEMAX根据波长权因子和光瞳变迹产生网格光线(如果有的话)。有最大权因子的波长使用由“Ray Density”选项设置的最多光线的网格尺寸。有最小权因子的波长在图形中设置用来维持正确表达的较少光线的网格。如果变迹被给定,光线网格也被变形来维持正确的光线分布。位于点列图上的RMS点尺寸考虑波长权因子和变迹因子。但是,它只是基于光线精确追迹基础上的RMS点尺寸的估算。在某些系统中它不是很精确。
像平面上参考点的交点坐标在每个点列图下被显示。如果是一个面被确定而不是像平面,那么该坐标是参考点在那个面上的交点坐标。既然参考点可以选择重心,这为重心坐标的确定提供了便利的途径。
离焦(Through Focus)
目的:
按焦平面漂移量的变化显示点列图。
设置:
本选项与标准点列图是相同的。
说明:
离焦点列图对估计象散,或分析最佳离焦或焦深是很有用的。
全视场(Full Field)
目的:
用公共的比例显示所有视场点的点列图。
设置:
本选项与标准点列图是相同的。
说明:
全视场点列图类型与标准类型是基本相同的,但所有的点是关于相同的参考点画出的,与每个视场位置各自的参考点是不同的。这为相对于其它视场点表达所分析点的点列图提供了方法。例如,这可以用来确定像空间中两个相近的点能否被分辨。如果点的尺寸比整个视场的尺寸小,在这种情况下,每个视场的点只是以简单的点的形式出现,“全视场点列图“类型是无用的。
矩阵(Matrix)
目的:
将点列图作为单个图表的矩阵显示,一行表示一个视场,一列表示一种波长。
点列图的原理就是显示光学系统在IMA面上的成像。换句话说,它就就是通过计算,把一系列物方的点通过光学系统以后,成像在IMA面上的情况给实际绘制出来。 为了表现方便,它可以选择一系列预定的模板形式,具体来说,比如一个在轴上的点,从无限远成像到IMA面上,ZEMAX就模拟在无限远有若干个发光点(光束),这些点平行射入入瞳,然后经过光学系统,最后成像在IMA面上。显然如果光学系统就是完美的光学系统,那么这些点成像点为一个理想的点。但对于实际的光学系统,就会成像为一个弥散斑。那么这个弥散斑在IMA面上的像,就就是Spot Diagram。同理,在非轴上点,也可以参照主光线的角度与位置,形成一系列的发光点,经过入瞳最后成像在IMA面上最后也形成一个弥散斑。 如何通过Spot Diagram观察出光学设计的质量,简单说,这个弥散斑越小越好。如果您发现弥散斑足够小,满足您对光学系统最小弥散斑的要求(spot diagram的单位就是微米)那么您的光学系统就完全可以进行实际的加工了。换句话说,就就是您的光学系统已经可以设计完成了。 如何才知道您的光学系统足够的好?这里有个参考,就就是airy 斑的参考。airy斑就是物理光学的一个概念。它指出在形成的弥散斑直径在2、44*F*(主波长)以内的时候,该光学系统可以认为就是理想(完美)光学系统。这样当您在Spot Diagram图中,在setting 菜单中,设置显示airy斑。然后发现您的点列图完全都在airy斑环之内,您就可以认为您的光学系统设计已经完美。但实际上,很少有光学系统,可以满足符合airy斑直径的要求。那么说明您的光学系统有像差。
课程1:单透镜(a singlet) 开始ZEMAX,输入波长和镜片数据,生成光线 特性曲线(ray fan),光程差曲线(OPD),和点列图 (Spot diagram),确定厚度求方法和变量,进行简 单的优化。 假设需要设计一个F/4的镜片,焦距为100mm,在轴上可见光谱范围内,用BK7玻璃,该怎样开始呢? 首先,运行ZEMAX。ZEMAX主屏幕会显示镜片数据编辑(LDE)。你可以对LDE(你工作的场所)窗口进行移动或重新调整尺寸,以适合你自己的喜好。LDE由多行和多列组成,类似于电子表格。半径、厚度、玻璃和半口径等列是使用得最多的,其他的则只在某些特定类型的光学系统中才会用到。 1、基本设置:开始,我们先为我们的系统输入波长。这不一定要先完成,我们只不过现在选中了这一步。在主屏幕菜单条上,选择“系统(System)”---“通用配置(general)”----“单位units”,先确定单位。再选择“系统(System)”菜单下的“波长(Wavelengths)”。屏幕中间会弹出一个“波长数据(Wavelength Data)”对话框。ZEMAX中有许多这样的对话框,用来输入数据和提供你选择。用鼠标在第二和第三行的“使用(Use)”上单击一下,
将会增加两个波长使总数成为三。现在,在第一个“波长”行中输入0.486,这是氢(Hydrogen)F谱线的波长,单位为微米。 Z EMAX全部使用微米作为波长的单位。现在,在第二行的波长列中输入0.587,最后在第三行输入0.656。这就是ZEMAX中所有有关输入数据的操作,转到适当的区域,然后键入数据。在屏幕的最右边,你可以看到一列主波长指示器。这个指示器指出了主要的波长,当前为0.486微米。在主波长指示器的第二行上单击,指示器下移到587的位置。主波长用来计算近轴参数,如焦距,放大率等等。“权重(Weight)”这一列用在优化上,以及计算波长权重数据如RMS点尺寸和STREHL率。现在让所有的权为1.0,单击OK保存所做的改变,然后退出波长数据对话框。 选择“系统(System)”---“视场(fields)”----“角度”将X、Y都设为零。表示光线平行于主光轴入射。 2、为镜片定义一个孔径。这可以使ZEMAX在处理其他的事情上,知道每一个镜片该被定为多大。由于我们需要一个F/4镜头,我们需要一个25mm的孔径(100mm的焦距除F/4)。设置这个孔径值,选择“系统”---“通用配置(General)”---“aperture(孔径)”输入“光圈数值”:25。注意孔径类型缺省时为“入瞳直径(Entrance Pupil Diameter)”,也可选择其他类型的孔径设置。 3、加入一些重要的表面数据。ZEMAX模型光学系统使用一系列的表面,每一个面有一个曲率半径,厚度(到下一个面的轴上距离),和玻璃。一些表面也可有其他的数据,我们以后将会讨论到。
使用ZEMAX于设计、优化、公差和分析 武汉光迅科技股份有限公司宋家军(QQ:41258981)转载并修改 摘要 光学设计软件ZEMAX的功能讨论可藉由使用ZEMAX去设计和分析一个投影系统来讨论,包括使用透镜数组(lenslet arrays) 来建构聚光镜(condenser)。 简介 ZEMAX以非序列性(non-sequential) 分析工具来结合序列性(sequential) 描光程序的传统功能,且为一套能够研究所有表面的光学设计和分析的整合性软件包,并具有研究成像和非成像系统中的杂散光(stray light) 和鬼影(ghosting) 的能力,从简单的绘图(Layout) 一直到优化(optimization)和公差分析(tolerance analysis)皆可达成。 根据过去的经验,对于光学系统的端对端(end to end)分析往往是需要两种不同的设计和分析工具。一套序列性描光软件,可用于设计、优化和公差分析,而一套非序列性或未受限制的(unconstrained) 描光软件,可用来分析杂散光、鬼影和一般的非成像系统,包括照明系统。 “序列性描光程序”这个名词是与定义一个光学系统为一连串表面的工具有关。所有的光线打到光学系统之后,会依序的从一个表面到另一个表面穿过这个系统。在定义的顺序上,所有的光线一定会相交到所有的表面,否则光路将终止。光线不会跳过任何中间的表面,且光线只能打在每一个已定义的表面一次。若实际光线路径交到一个表面上超过一次,如使用在二次描光(double pass) 中的组件,必须在序列性列表中,再定义超过一次的表面参数。 大部份成像光学系统,如照相机镜头、望远镜和显微镜,可在序列性模式中完整定义。对于这些系统,序列性描光具有许多优点:非常快、非常弹性和非常普遍。几乎任何形状的光学表面和材质特性皆可建构。在成像系统中,序列性描光最重要的优点为使用简单且高精确的方法来做优化和分析。序列性描光的缺点,包括无法追迹所有可能的光路径(即鬼影反射) 和许多无法以序列性方式来描述的光学系统或组件。 非序列性描光最常用来分析成像系统中的杂散光和鬼影,甚致分析照明和其它非成像系统。在非序列性描光中,光线入射到光学系统后,是自由的沿着实际光学路径追迹;一条光线可能打到一个对象(object) 许多次,而且可能完全未打到其它对象。此外,非序列性方法可用来分析从光学或机构组件产生的表面散射(scatter),以及从场内(in-field) 和场外(out-of-field) 的光源所产生的表面反射而形成的鬼影成像。 ZEMAX的功能 ZEMAX可以用于一个完全序列性模式中、一个完全非序性模式中和一个混合模式中,混合模式对分析具有大部分序列性而却有一些组件是作用在非序列性方式的系统,是相当有用的,如导光管(light pipes) 和屋顶棱镜(roof prisms)等。
ZEMAX单透镜设计例子,单透镜是最简单的透镜系统了,这个例子基本是很多ZEMAX教程开头都会讲的。 1-1 单透镜 这个例子是学习如何在ZEMAX里键入资料,包括设罝系统孔径(System Aperture)、透镜单位(Lens Units)、以及波长范围(Wavelength Range),并且进行优化。你也将使用到光线扇形图(Ray Fan Plots)、弥散斑(Spot Diagrams)以及其它的分析工具来评估系统性能。 这例子是一个焦距100 mm、F/4的单透镜镜头,材料为BK7,并且使用轴上(On-Axis)的可见光进行分析。首先在运行系统中开启ZEMAX,默认的编辑视窗为透镜资料编辑器(Lens Data Editor, LDE),在LDE可键入大多数的透镜参数,这些设罝的参数包括: ?表面类型(Surf:Type)如标准球面、非球面、衍射光栅…等 ?曲率半径(Radius of Curvature) ?表面厚度(Thickness):与下一个表面之间的距离 ?材料类型(Glass)如玻璃、空气、塑胶…等:与下一个表面之间的材料 ?表面半高(Semi-Diameter):决定透镜表面的尺寸大小 上面几项是较常使用的参数,而在LDE后面的参数将搭配特殊的表面类型有不同的参数涵义。 1-2 设罝系统孔径 首先设罝系统孔径以及透镜单位,这两者的设罝皆在按钮列中的「GEN」按钮里(System->General)。点击「GEN」或透过菜单的System->General 来开启General的对话框。 点击孔径标签(Aperture Tab)(默认即为孔径页)。因为我们要建立一个焦距100 mm、F/4的单透镜。所以需要直径为25 mm的入瞳(Entrance Pupil),因此设罝: ?Aperture Type:Entrance Pupil Diameter ?Aperture Value:25 mm
Z E M A X中像差分析及 理解 集团文件发布号:(9816-UATWW-MWUB-WUNN-INNUL-DQQTY-
Z E M A X中像差分析及理解1、轴上点球差和轴向色差、轴上点垂轴色差 在ZEMAX的分析菜单中有“longitudinalaberration”项目,实际上就是“轴上点的球差分析”,不过直译过来是“纵向像差”,这实际上是外国人的说法罢了。在这个分析图中,纵轴是“光瞳”,横轴是“像差”值。分析图描述了F、d、C三个描述光波的球差情况,实际上也反映了轴向色差的情况,就是F、C光的数值差。 在“RayAbberation”(横向特性曲线)的0视场分析图中,也反映了轴上点像差和轴向色差的情况。在该分析图中,数值反映的是“在像面上,各个孔径的光线与像面交点的高度与主光线与像面交点高度的差值”。轴上点与其差别为: 其中是几何像差表示的轴上点球差,表示的是横向特性曲线数值,是该对子午光线出射夹角。 轴上点的“垂轴色差”就是“RayAbberation”0视场的F、C光线数据差值。 2、??轴外球差和轴外色差 “RayAbberation”光性特性曲线其他分析图反映的是物面不同高度或者不同视场的“轴外点球差和轴外点色差”,但是都反映的是像面上交点高度的差。需要获得确切的数据值
需要角度之间的转换,这是比较复杂的一件事情。但是,从图上我们可以反映出轴外点球差和色差的大体值,一般而言其数据不会超出一个数量级。 3、??彗差与色彗差 “RayAbberation”不但反映了系统球差和色差的大体情况,而且反映了彗差的情况。按照像差理论,彗差是与孔径和视场都有关的一个像差,主要反映了经过光学系统后与主光线原对称的光线对不再与主光线对称的情形,能量上反映了对于中心点的不对称,也就是“彗尾现象”。 彗差的大体数值可以使用以下方法大体判断。如图。 特性曲线的端点代表代表光线对在像面上的不同交点,连接两点与纵轴有一个交点A,B。A点与原点的距离大体上可以描述该视场下的彗差数值。而AB两点之间的距离表示两种不同波长光之间的“色彗差”。 4、??场曲、畸变和像散、色场曲、色畸变 场曲和畸变是有专门的特性曲线描述的。当然,其中的不同波长之间的场曲差异以及畸变差异就反映了“色场曲”和“色畸变”像差。 至于“像散”,从其定义可以从场曲图中分析出来,主波长光线的“子午场曲和弧矢场曲之差”。ZEMAX描述的场曲为“宽光束场曲”而非“细光束场曲”。
ZEMAX像差深入以及像差各种图表分 析 初级像差深入 近轴光线和远轴光线的概念。 近轴光线和远轴光线都是指与光轴平行的光线,它们都成像在光轴上(下图中画的是主光轴情况)缩小的光圈可以拦去远轴光线,而由近轴光线来成像。 总的来说,镜头的像差可以分成两大类,即单色像差及色差。镜头的单色像差五种,它们分别是影响成像清晰度的球差、彗差、象散、场曲,以及影响物象相似度的畸变 光线称远轴光线 主光轴 /isnonci.oon 以下就分别介绍五种不同性质的单色像差: 球差
是由于镜头的透镜球面上各点的聚光能力不同而引起的。从无穷远处来的平行光线在理论上应该会聚 在焦点上。但是由于近轴光线与远轴光线的会聚点并不一致,会聚光线并不是形成一个点,而是一个以光轴为中心对称的弥散圆,这种像差就称为球差。球差的存在引起了成像的模糊,而从下图可以看出,这种模糊是与光圈的大小有关的。 小光圈时,由于光阑挡去了远轴光线,弥散圆的直径就小,图像就会清晰。大光圈时弥散圆直径就大, 图像就会比较模糊。 必须注意,这种由球差引起的图像模糊与景深中的模糊完全是两会事,不可以混为一谈的。球差可以 通过复合透镜或者非球面镜等办法在最大限度下消除的。在照相镜头中,光圈(孔径)数增加一档(光 孔缩小一档),球差就缩小一半。我们在拍摄时,只要光线条件允许,可以考虑使用较小的光圈 (孔 径)来减小球差的影响。
实用文案彗差
是在轴外成像时产生的一种像差。从光轴外的某一点向镜头发岀一束平行光线,经光学系统后,在像平面上并不是成一个点的像,而是形成不对称的弥散光斑,这种弥散光斑的形状象彗星,从中心到边缘拖着一个由细到粗的尾巴,首端明亮、清晰,尾端宽大、暗淡、模糊。这种轴外光束引起的像差就称为彗差。彗差的大小既与光圈仔L径)有关,也与视场有关。我们在拍摄时也可以采取适当采用较小的光圈(孔径)来减少彗差对成象的影响。 像散 也是一种轴外像差。与彗差不同,像散仅仅与视场有关。由于轴外光束的不对称性,使得轴外点的子午细光束(即镜头的直径方向)的会聚点与弧矢细光束(镜头的园弧方向)的会聚点位置不同,这种现象称为象散。像散可以对照眼睛的散光来理解。带有散光的眼睛,实际上是在两个方向上的晶状体曲率不一致,造成看到的点弥散成了一条短线。象散也使得轴外成像的像质大大地下降。像散的大小只与视场角有关,与孔径是没有关系的。即使光圈开得很小,在子午和弧矢方向仍然无法同时获得非常清晰的像。在广角镜头中,由于视场角比较大, 像散现象就比较明显。我们在拍摄的时候应该尽量使被摄体处于画面的中心。这好象与构图要求不把 主要表现对象放在图面正中央有些冲突,如何掌握就要看实际情况了。
点列图的原理是显示光学系统在IMA面上的成像。换句话说,它就是通过计算,把一系列物方的点通过光学系统以后,成像在IMA面上的情况给实际绘制出来。 为了表现方便,它可以选择一系列预定的模板形式,具体来说,比如一个在轴上的点,从无限远成像到IMA面上,ZEMAX就模拟在无限远有若干个发光点(光束),这些点平行射入入瞳,然后经过光学系统,最后成像在IMA面上。显然如果光学系统是完美的光学系统,那么这些点成像点为一个理想的点。但对于实际的光学系统,就会成像为一个弥散斑。那么这个弥散斑在IMA面上的像,就是Spot Diagram。同理,在非轴上点,也可以参照主光线的角度和位置,形成一系列的发光点,经过入瞳最后成像在IMA面上最后也形成一个弥散斑。 如何通过Spot Diagram观察出光学设计的质量,简单说,这个弥散斑越小越好。如果你发现弥散斑足够小,满足你对光学系统最小弥散斑的要求(spot diagram的单位是微米)那么你的光学系统就完全可以进行实际的加工了。换句话说,就是你的光学系统已经可以设计完成了。 如何才知道你的光学系统足够的好?这里有个参考,就是airy 斑的参考。airy斑是物理光学的一个概念。它指出在形成的弥散斑直径在2.44*F*(主波长)以内的时候,该光学系统可以认为是理想(完美)光学系统。这样当你在Spot Diagram图中,在setting菜单中,设置显示airy斑。然后发现你的点列图完全都在airy斑环之内,你就可以认为你的光学系统设计已经完美。但实际上,很少有光学系统,可以满足符合airy斑直径的要求。那么说明你的光学系统有像差。
究竟是哪种像差在起主要作用?主要的像差有,球差,慧差,像散,场曲,畸变。这些像差在spot diagram上的表现各不相同。但由于一个光学系统通常是各种像差的混合。因此需要你对spot diagram的形状进行判断。确认是主要是哪种像差,然后通过修改玻璃,或者曲率以及光阑的位置等加以调整。 不同的像差有不同的像表现,同时随着像差的大小不同,这个像,也叫斑点的大小也不一样,显然像差越小的光学系统,其斑点也越小。衡量这个斑点大小有个定义,就是RMS半径定义,另外还有一个就是几何半径的定义。RMS是均方根半径,可以定量的反映这个系统实际的斑点大小。 在Spot Diagram中还有几个参数可以参考,RMS RADIUS,均平方根半径是一个重要的半径参数,它是弥散斑各个点坐标,参考中心点,进行的坐标平方和后,除以点数量,然后开方的值,这个值的半径可以反映一个典型的弥散斑的大小,以定量的反映这个系统实际的斑点大小。但它不是全部弥散斑的直径,全部弥散斑的直径是GEO RADIUS。RMS RADIUS是重要的反映弥散质量的参数,它和在优化中和MF的值极大的吻合。(就是说MF的某个视场最后值就是RMS的半径) 需要说明的是:不同的射入入瞳的光线排列会对最后的RMS半径等有影响,但并不大。 关键影响RMS半径的是,每个airy斑的中心点参考点的选择:一种选择的方式是根据主光线的位置做为斑点中心光线的中点。另外一种方式是采用斑点的实际重心做为斑点中点。 对于一个轴对称系统,在轴上,显然主光线中心和斑点重心是一点没有差别,但在轴外点成像。主光线的中心计算出来的RMS显然要比斑点重心计算的RMS半径要大。其实,通常采用的是斑点重心的参考中点方式。
使用ZEMAX于设计、优化、公差和分析 摘要 光学设计软件ZEMAX的功能讨论可藉由使用ZEMAX去设计和分析一个投影系统来讨论,包括使用透镜数组(lenslet arrays) 来建构聚光镜(condenser)。 简介 ZEMAX以非序列性(non-sequential) 分析工具来结合序列性(sequential) 描光程序的传统功能,且为一套能够研究所有表面的光学设计和分析的整合性软件包,并具有研究成像和非成像系统中的杂散光(stray light) 和鬼影(ghosting) 的能力,从简单的绘图(Layout) 一直到优化(optimization)和公差分析(tolerance analysis)皆可达成。 根据过去的经验,对于光学系统的端对端(end to end)分析往往是需要两种不同的设计和分析工具。一套序列性描光软件,可用于设计、优化和公差分析,而一套非序列性或未受限制的(unconstrained) 描光软件,可用来分析杂散光、鬼影和一般的非成像系统,包括照明系统。 “序列性描光程序”这个名词是与定义一个光学系统为一连串表面的工具有关。所有的光线打到光学系统之后,会依序的从一个表面到另一个表面穿过这个系统。在定义的顺序上,所有的光线一定会相交到所有的表面,否则光路将终止。光线不会跳过任何中间的表面,且光线只能打在每一个已定义的表面一次。若实际光线路径交到一个表面上超过一次,如使用在二次描光(double pass) 中的组件,必须在序列性列表中,再定义超过一次的表面参数。
大部份成像光学系统,如照相机镜头、望远镜和显微镜,可在序列性模式中完整定义。对于这些系统,序列性描光具有许多优点:非常快、非常弹性和非常普遍。几乎任何形状的光学表面和材质特性皆可建构。在成像系统中,序列性描光最重要的优点为使用简单且高精确的方法来做优化和分析。序列性描光的缺点,包括无法追迹所有可能的光路径(即鬼影反射) 和许多无法以序列性方式来描述的光学系统或组件。 非序列性描光最常用来分析成像系统中的杂散光和鬼影,甚致分析照明和其它非成像系统。在非序列性描光中,光线入射到光学系统后,是自由的沿着实际光学路径追迹;一条光线可能打到一个对象(object) 许多次,而且可能完全未打到其它对象。此外,非序列性方法可用来分析从光学或机构组件产生的表面散射(scatter),以及从场内(in-field) 和场外(out-of-field) 的光源所产生的表面反射而形成的鬼影成像。 ZEMAX的功能 ZEMAX可以用于一个完全序列性模式中、一个完全非序性模式中和一个混合模式中,混合模式对分析具有大部分序列性而却有一些组件是作用在非序列性方式的系统,是相当有用的,如导光管(light pipes) 和屋顶棱镜(roof prisms)等。 序列性系统需定义视场角(field of view)、波长范围(wavelength range)和表面数据(surface date)。序列性设计的最重要参数之一,为系统孔径(system aperture)。系统孔径,常指入瞳(entrance pupil) 或孔径光栏(STO),它限制可从已定义视场入射光学系统的光线。光学表面可以是折射、反射或绕射。透镜可以是由均匀或渐变折射率材质所制成。表面的下弯(sag) 可以是球面、圆锥面(conic)、非球面(aspheric)或藉由多项式或其它参数函数
第四章设计教程 简介 这一章将要教你如何使用ZEMAX,这一章的每一节将会让你接触一个不同的设计问题。第一个设计例子是非常简单的,如果你是一个有经验的镜片设计师,你也许觉得它并不值得你去费心,但是,如果你花费一点点时间去接触它,你可以学到如何运行ZEMAX,然后你可以继续你自己特别感兴趣的设计。 前几个例子中,提供了一些关于镜片设计理论的教程内容,用来帮助那些对专用术语不是很了解的人。但在总体上来说,这本手册,以及其中的这些特例,目的都不是要将一个新手培养成为一个专家。如果你跟不上这些例子,或者你不能理解程序演示时与计算有关的数学知识,可以参考任何一本“简介”这一章中所列出的好书。在开始课程之前,你必须先通过正当手段安装ZEMAX。 课程1:单透镜(a singlet) 你将要学到的:开始ZEMAX,输入波长和镜片数据,生成光线特性曲线(ray fan),光程差曲线(OPD),和点列图(Spot diagram),确定厚度求解方法和变量,进行简单的优化。 假设你需要设计一个F/4的镜片,焦距为100mm,在轴上可见光谱范围内,用BK7玻璃,你该怎样开始呢? 首先,运行ZEMAX。ZEMAX主屏幕会显示镜片数据编辑(LDE)。你可以对LDE窗口进行移动或重新调整尺寸,以适合你自己的喜好。LDE由多行和多列组成,类似于电子表格。半径、厚度、玻璃和半口径等列是使用得最多的,其他的则只在某些特定类型的光学系统中才会用到。 LDE中的一小格会以“反白”方式高亮显示,即它会以与其他格子不同的背景颜色将字母显示在屏幕上。如果没有一个格子是高亮的,则在任何一格上用鼠标点击,使之高亮。这个反白条在本教程中指的就是光标。你可以用鼠标在格子上点击来操纵LDE,使光标移动到你想要停留的地方,或者你也可以只使用光标键。LDE的操作是简单的,只要稍加练习,你就可以掌握。 开始,我们先为我们的系统输入波长。这不一定要先完成,我们只不过现在选中了这一步。在主屏幕菜单条上,选择“系统(System)”菜单下的“波长(Wavelengths)”。 屏幕中间会弹出一个“波长数据(Wavelength Data)”对话框。ZEMAX中有许多这样的对话框,用来输入数据和提供你选择。用鼠标在第二和第三行的“使用(Use)”上单击一下,将会增加两个波长使总数成为三。现在,在第一个“波长”行中输入486,这是氢(Hydrogen)F谱线的波长,单位为微米。 ZEMAX全部使用微米作为波长的单位。现在,在第二行的波长列中输入587,最后在第三行输入656。这就是ZEMAX中所有有关输入数据的操作,转到适当的区域,然后键入数据。在屏幕的最右边,你可以看到一列主波长指示器。这个指示器指出了主要的波长,当前为486微米。在主波长指示器的第二行上单击,指示器下移到587的位置。主波长用来计算近轴参数,如焦距,放大率等等。ZEMAX一般使用微米作为波长的单位“权重(Weight)”这一列用在优化上,以及计算波长权重数据如RMS点尺寸和STREHL率。现在让所有的权为1.0,单击OK保存所做的改变,然后退出波长数据对话框。 现在我们需要为镜片定义一个孔径。这可以使ZEMAX在处理其他的事情上,知道每一个镜片该被定为多大。由于我们需要一个F/4镜头,我们需要一个25mm的孔径(100mm 的焦距除F/4)。设置这个孔径值,选择“系统”中的“通常(General)”菜单项,出现“通
zemax设计实例之手机镜头 2012.03.13 评论关闭4,757 views 随着手机市场对高像素手机镜头的需求增大,利用Zemax光学设计软件设计一款大相对孔径800万像素的广角镜头。该镜头由1片非球面玻璃镜片,3片非球面塑料镜片,1片滤光镜片和1片保护玻璃构成。镜头光圈值F为2.45,视场角2ω为68°,焦距为4.25mm,后工作距离为0.5mm。采用APTINA公司的MT9E013型号800万像素传感器,最大分辨率为3264×2448,最小像素为1.4μm。设计结果显示:各视场的均方根差(RMS)半径小于1.4μm,在奈奎斯特频率1/2处大多数视场的MTF值均大于0.5,畸变小于2%,TV畸变小于0.3%。 关键词:手机镜头;光学设计;800万像素;Zemax 引言 手机镜头的研发工作始于20世纪90年代,世界上第一款照相手机是由夏普JPHONE(现在的日本沃达丰)在2001年推出的JSH04手机,它只搭载了一个11万像素的COMS数码相机镜头。随后各大手机知名制造厂商纷纷开始研发手机摄像功能。2003年5月22日夏普制造了100万素的JSH53,目前照相手机的市场占有率几乎是100%,特别是带有高像素2M、3M、5M、8M的镜头就成为镜头研发的热点[1]。目前800万像素的手机市场占有率还不是太多,但随着人们对高端手机的需求量越来越大,800万像素手机肯定是主流趋势。鉴于此,在选用合理初始结构的基础上,优化出了一款800万像素的手机镜头。 1感光器件的选取 感光器件有CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)两种。CMOS器件产生的图像质量相比于CCD来说要低一些,到目前为止,大多数消费级别以及高端数码相机都使用CCD作为感光元件;CMOS感应器则作为低端产品应用于一些摄像镜头上,目前随着CMOS技术的日益成熟,也有一些高端数码产品使用CMOS器件。CMOS相对于CCD有很多优点,比如价格低、集成化程度高、体积小、质量轻、功耗低、无光晕、高读出速率等[6]。
Z E M A X中像差分析及理解1、轴上点球差和轴向色差、轴上点垂轴色差 在ZEMAX的分析菜单中有“longitudinalaberration”项目,实际上就是“轴上点的球差分析”,不过直译过来是“纵向像差”,这实际上是外国人的说法罢了。在这个分析图中,纵轴是“光瞳”,横轴是“像差”值。分析图描述了F、d、C 三个描述光波的球差情况,实际上也反映了轴向色差的情况,就是F、C光的数值差。 在“RayAbberation”(横向特性曲线)的0视场分析图中,也反映了轴上点像差和轴向色差的情况。在该分析图中,数值反映的是“在像面上,各个孔径的光线与像面交点的高度与主光线与像面交点高度的差值”。轴上点与其差别为: 其中是几何像差表示的轴上点球差,表示的是横向特性曲线数值,是该对子午光线出射夹角。 轴上点的“垂轴色差”就是“RayAbberation”0视场的F、C光线数据差值。 2、??轴外球差和轴外色差 “RayAbberation”光性特性曲线其他分析图反映的是物面不同高度或者不同视场的“轴外点球差和轴外点色差”,但是都反映的是像面上交点高度的差。需要获得确切的数据值需要角度之间的转换,这是比较复杂的一件事情。但是,从图上我们可以反映出轴外点球差和色差的大体值,一般而言其数据不会超出一个数量级。 3、??彗差与色彗差 “RayAbberation”不但反映了系统球差和色差的大体情况,而且反映了彗差的情况。按照像差理论,彗差是与孔径和视场都有关的一个像差,主要反映了经过光学系统后与主光线原对称的光线对不再与主光线对称的情形,能量上反映了对于中心点的不对称,也就是“彗尾现象”。 彗差的大体数值可以使用以下方法大体判断。如图。 特性曲线的端点代表代表光线对在像面上的不同交点,连接两点与纵轴有一个交点A,B。A点与原点的距离大体上可以描述该视场下的彗差数值。而AB两点之间的距离表示两种不同波长光之间的“色彗差”。 4、??场曲、畸变和像散、色场曲、色畸变
Z E M A X单透镜设计例子详细(多图)
ZEMAX单透镜设计例子,单透镜是最简单的透镜系统了,这个例子基本是很多ZEMAX教程开头都会讲的。 1-1 单透镜 这个例子是学习如何在ZEMAX里键入资料,包括设罝系统孔径(System Aperture)、透镜单位(Lens Units)、以及波长范围(Wavelength Range),并且进行优化。你也将使用到光线扇形图(Ray Fan Plots)、弥散斑(Spot Diagrams)以及其它的分析工具来评估系统性能。 这例子是一个焦距100 mm、F/4的单透镜镜头,材料为BK7,并且使用轴上(On-Axis)的可见光进行分析。首先在运行系统中开启ZEMAX,默认的编辑视窗为透镜资料编辑器(Lens Data Editor, LDE),在LDE可键入大多数的透镜参数,这些设罝的参数包括: ?表面类型(Surf:Type)如标准球面、非球面、衍射光栅…等 ?曲率半径(Radius of Curvature) ?表面厚度(Thickness):与下一个表面之间的距离 ?材料类型(Glass)如玻璃、空气、塑胶…等:与下一个表面之间的材料 ?表面半高(Semi-Diameter):决定透镜表面的尺寸大小 上面几项是较常使用的参数,而在LDE后面的参数将搭配特殊的表面类型有不同的参数涵义。 1-2 设罝系统孔径 首先设罝系统孔径以及透镜单位,这两者的设罝皆在按钮列中的「GEN」按钮里(System->General)。点击「GEN」或透过菜单的System->General来开启General的对话框。 点击孔径标签(Aperture Tab)(默认即为孔径页)。因为我们要建立一个焦距100 mm、F/4的单透镜。所以需要直径为25 mm的入瞳(Entrance Pupil),因此设罝: ?Aperture Type:Entrance Pupil Diameter ?Aperture Value:25 mm
ZEMAX像差深入以及像差各种图表分析 目录 [隐藏] ?1初级像差深入 o1.1球差 o1.2彗差 o1.3像散 o1.4场曲 o1.5畸变 ?2各种像差图表 o2.1初级球差大的点列图 o2.2初级球差大的垂轴像差 o2.3子午慧差大的情况 o2.4其慧差和垂轴色差大 初级像差深入 近轴光线和远轴光线的概念。 近轴光线和远轴光线都是指与光轴平行的光线,它们都成像在光轴上(下图中画的是主光轴情况)。缩小的光圈可以拦去远轴光线,而由近轴光线来成像。 总的来说,镜头的像差可以分成两大类,即单色像差及色差。镜头的单色像差五种,它们分别是影响成像清晰度的球差、彗差、象散、场曲,以及影响物象相似度的畸变。
以下就分别介绍五种不同性质的单色像差: 球差 是由于镜头的透镜球面上各点的聚光能力不同而引起的。从无穷远处来的平行光线在理论上应该会聚在焦点上。但是由于近轴光线与远轴光线的会聚点并不一致,会聚光线并不是形成一个点,而是一个以光轴为中心对称的弥散圆,这种像差就称为球差。球差的存在引起了成像的模糊,而从下图可以看出,这种模糊是与光圈的大小有关的。 小光圈时,由于光阑挡去了远轴光线,弥散圆的直径就小,图像就会清晰。大光圈时弥散圆直径就大,图像就会比较模糊。 必须注意,这种由球差引起的图像模糊与景深中的模糊完全是两会事,不可以混为一谈的。球差可以通过复合透镜或者非球面镜等办法在最大限度下消除的。在照相镜头中,光圈(孔径)数增加一档(光孔缩小一档),球差就缩小一半。我们在拍摄时,只要光线条件允许,可以考虑使用较小的光圈(孔径)来减小球差的影响。
彗差 是在轴外成像时产生的一种像差。从光轴外的某一点向镜头发出一束平行光线,经光学系统后,在像平面上并不是成一个点的像,而是形成不对称的弥散光斑,这种弥散光斑的形状象彗星,从中心到边缘拖着一个由细到粗的尾巴,首端明亮、清晰,尾端宽大、暗淡、模糊。这种轴外光束引起的像差就称为彗差。彗差的大小既与光圈(孔径)有关,也与视场有关。我们在拍摄时也可以采取适当采用较小的光圈(孔径)来减少彗差对成象的影响。
ZEMAX中像差分析及理解 1、轴上点球差和轴向色差、轴上点垂轴色差 在ZEMAX的分析菜单中有“longitudinal aberration”项目,实际上就是“轴上点的球差分析”,不过直译过来是“纵向像差”,这实际上是外国人的说法罢了。在这个分析图中,纵轴是“光瞳”,横轴是“像差”值。分析图描述了F、d、C三个描述光波的球差情况,实际上也反映了轴向色差的情况,就是F、C光的数值差。 在“Ray Abberation”(横向特性曲线)的0视场分析图中,也反映了轴上点像差和轴向色差的情况。在该分析图中,数值反映的是“在像面上,各个孔径的光线与像面交点的高度与主光线与像面交点高度的差值”。轴上点与其差别为: 其中是几何像差表示的轴上点球差,表示的是横向特性曲线数值,是该对子午光线出射夹角。 轴上点的“垂轴色差”就是“Ray Abberation”0视场的F、C光线数据差值。 2、轴外球差和轴外色差 “Ray Abberation”光性特性曲线其他分析图反映的是物面不同高度或者不同视场的“轴外点球差和轴外点色差”,但是都反映的是像面上交点高度的差。需要获得确切的数据值需要角度之间的转换,这是比较复杂的一件事情。但是,从图上我们可以反映出轴外点球差和色差的大体值,一般而言其数据不会超出一个数量级。 3、彗差与色彗差 “Ray Abberation”不但反映了系统球差和色差的大体情况,而且反映了彗差的情况。按照像差理论,彗差是与孔径和视场都有关的一个像差,主要反映了经过光学系统后与主光线原对称的光线对不再与主光线对称的情形,能量上反映了对于中心点的不对称,也就是“彗尾现象”。 彗差的大体数值可以使用以下方法大体判断。如图。 特性曲线的端点代表代表光线对在像面上的不同交点,连接两点与纵轴有一个交点A,B。A点与原点的距离大体上可以描述该视场下的彗差数值。而AB两点之间的距离表示两种不同波长光之间的“色彗差”。 4、场曲、畸变和像散、色场曲、色畸变
ZEMAX 光学设计报告 一、设计目的 通过对设计一个双胶合望远物镜,学会zemax 软件的基本应用和操作。 二、设计要求 设计一个全视场角为1.56°,焦距为1000mm ,且相对孔径为1:10的双胶合望远物镜,要求相高为y `=13.6mm 。 三、设计过程 1.双胶合望远物镜系统初始结构的选定 1.1选型 由于该物镜的全视场角较小,所以其轴外像差不太大,主要校正的像差有球差、正弦差和位置色差。又因为其相对孔径较小,所以选用双胶合即可满足设计要求。本系统采用紧贴型双胶合透镜组,且孔径光阑与物镜框相重合。 1.2确定基本像差参量 根据设计要求,假设像差的初级像差值为零,即球差0'0=L δ;正弦差0' 0s =K ;位置色差 0'0=FC l δ。那么按初级像差公式可得0===∑∑∑I II I C S S ,由此可得基本像差参量为 0===I ∞ ∞C W P 。 1.3求0P )(() ?? ?? ?+-+-=∞∞∞∞ 火石玻璃在前时 冕牌玻璃在前时 2 2 02.085.01.085.0W P W P P 因为没有指定玻璃的种类,故暂选用冕牌玻璃进行计算,即0085.00-=P 。 1.4选定玻璃组合 鉴于9K 玻璃的性价比较好,所以选择9K 作为其中一块玻璃。查表发现当000.0=I C ,与0085.00-=P 最接近的组合是9K 与2ZF 组合,此时对应的038.00=P 。 此系统选定9K 与2ZF 组合。 9 K 的 折 射 率 5163.11=n , 2 ZF 的折射率 6725.12=n , 038319.00=P ,284074.40-=Q ,06099.00-=W ,009404.21=?, 44.2=A ,72.1=K 。 1.5求形状系数Q
ZEMAX勺基本像差控制与优化 ZEMAX 已经成为光学设计人员最常用勺工具软件了。光学设计中,描述和控制一个光学系统勺初级像差结构,通常使用轴上球差、轴向色差、彗差、场曲、畸变、垂轴色差、像散等像差参数。当我们企图更为详细勺描述和控制轴外指定视场、指定光束勺像差结构时,常常会使用轴外宽光束球差、彗差和细光束场曲等三个像差参数。然而,ZEMAX并不能像SOD88那样直接引用相对应的像差操作数来指定像差目标大小,更没有描述高级像差数勺像差操作数,这些通常都需要设计者自行分析和定义。 描述和控制系统光束结构的方法因习惯而有一定的差异,由于某些像差变量之间有某种相关性,而设置的优化权重又可以不同,因此常常都能够达到相同的效果,只是所计算的数学步骤不同而已。到底选择多少个参数来描述一个系统,虽无统一规定,但是还是要因系统像差特性不同而区别选择。经验表明,最少最准确的参数描述量,能够尽可能的提高优化的效率,并且减少掉入效果较差的局部优化的次数。经验丰富的工程师,轻车熟路,在这个环节上少走了很多的弯路,从而其设计效率和设计出来的产品品质要比通常的设计人员有些得多,成功率高的多。 笔者撰写本文的目的就是企图浅显的探讨光学设计中,ZEMAX 中光学结构的描述方法以及权重选择的问题。这些都是笔者在设计当中积累的经验,可能这个文章的论断会由于经验的多寡有一定的局限性,所以希望读者当作参考,不要照搬。 基本像差描述和控制 1、轴上球差LONA 和SPHA LONA 表示的是轴上物点指定波长,指定光束尺寸(光线对)的轴上成像交点到近轴焦平面之间轴向距离。这个定义和我们定义的轴向球差相同。光瞳尺寸(光束尺寸)在0~1 之间,那么将追迹实际的光束汇交点计算轴向球差。 SPHA 常用于指定面产生勺像差数值。若不指定特殊面(取值为0),则计算所有面产生球差总和。注意这个总合不是像差计算公式中勺经过各面逐个放大之后勺加权和,而是代数和(有待读者进一步验证)。 经验:当选择LONA 控制不住球差时,同时加入SPHA 操作数,设置合理勺权重,可以将轴向球差进一步改善。 2、轴向色差AXCL 定义为两个指定波长勺近轴焦平面轴向距离。若光瞳尺寸(光束尺寸)定义为0,那么使用近轴焦平面进行色差计算,定义不为0,则使用实际勺光线与轴交点位 置进行色差计算。 3、垂轴色差(倍率色差)在ZEMAX 中没有直接定义垂轴色差的操作数,但是从垂轴色差的定义可以知道,它是指某视场、某指定光束尺寸的、两指定波长光束在像面上所成的理想像的垂向距离差。 在ZEMAX中有REAY(wav, Hy , Py)操作数。其定义为指定波长、指定视场、指定光
头盔的定位传感系统是与光学系统同等重要的一部分。它包括头部的定位和眼球的定位。眼球的定位主要应用在瞄准系统上,一般采用红外图像的识别处理跟踪来获得眼球的运动信息。头部定位采用的方法比较多,如超声波、磁、红外、发光二极管等的定位系统,头部的定位提供位置和指向六个自由度的信息。对定位传感系统的要求是灵敏度高、延迟小,灵敏度低易受外界环境影响。 头盔电路控制系统一般与头盔显示器分开放置以减轻头盔重量,其连接系统在机载时的设计要考虑在紧急情况下能够迅速使头盔和飞机上的控制系统脱离,保证飞行员的安全。 头盔是显示器的固定部件,由于显示器的重量在头的前部,这使头盔的中心发生了变化,容易产生疲劳,因此赢在头后部加配重保持重心不变。 用来描述HMD光学系统的几个重要参数: ●视场(FOV) ●出瞳 ●Optical eye relief ●光通量 ●分束器传递(beamsplitter transmission/反射系数)(针对see-through HMD)●调制传递函数(MTF) ●色差 ●畸变 ●场曲 ●放大率 ●鬼像 ●重量 ●重心 ●体积 虽然光学材料的发展已经有了显著地进步,但是最好的成像质量还是由玻璃得到的,不幸的是玻璃是最重的光学媒介。塑料光学元件有质量小和成本低的特点,在牺牲部分成像质量的代价下可以考虑采用。全息元件的质量更轻。折射光学系统设计中,使用全息分束器可以利用部分波长并且不产生多余的光强度。 人眼的瞬间视场是椭圆的,一般为垂直120°水平150°,双眼总视场为垂直120°水平200°。光学系统的视场越大越好,但是FOV的尺寸被几个因素制约,包括重量,位置和分辨率。 影响设计参数最重要的一个指标为MTF,MTF是度量光学系统从输入到输出传递调制对比度的工具,MTF曲线横坐标为空间频率。任何情况均可归结为一系列正弦曲线的空间频率,所以可以用来度量光学系统的像质损耗。
简介 这一章将要教你如何使用ZEMAX,这一章的每一节将会让你接触一个不同的设计问题。第一个设计例子是非常简单的,如果你是一个有经验的镜片设计师,你也许觉得它并不值得你去费心,但是,如果你花费一点点时间去接触它,你可以学到如何运行ZEMAX,然后你可以继续你自己特别感兴趣的设计。 前几个例子中,提供了一些关于镜片设计理论的教程内容,用来帮助那些对专用术语不是很了解的人。但在总体上来说,这本手册,以及其中的这些特例,目的都不是要将一个新手培养成为一个专家。如果你跟不上这些例子,或者你不能理解程序演示时与计算有关的数学知识,可以参考任何一本“简介”这一章中所列出的好书。在开始课程之前,你必须先通过正当手段安装ZEMAX。 课程1:单透镜(a singlet) 你将要学到的: 开始ZEMAX,输入波长和镜片数据,生成光线特性曲线(ray fan),光程差曲线(OPD),和点列图(Spot diagram),确定厚度求解方法和变量,进行简单的优化。 假设你需要设计一个F/4的镜片,焦距为100mm,在轴上可见光谱范
围内,用BK7玻璃,你该怎样开始呢? 首先,运行ZEMAX。ZEMAX主屏幕会显示镜片数据编辑(LDE)。你可以对LDE窗口进行移动或重新调整尺寸,以适合你自己的喜好。LDE 由多行和多列组成,类似于电子表格。半径、厚度、玻璃和半口径等列是使用得最多的,其他的则只在某些特定类型的光学系统中才会用到。 LDE中的一小格会以“反白”方式高亮显示,即它会以与其他格子不同的背景颜色将字母显示在屏幕上。如果没有一个格子是高亮的,则在任何一格上用鼠标点击,使之高亮。这个反白条在本教程中指的就是光标。你可以用鼠标在格子上点击来操纵LDE,使光标移动到你想要停留的地方,或者你也可以只使用光标键。LDE的操作是简单的,只要稍加练习,你就可以掌握。 开始,我们先为我们的系统输入波长。这不一定要先完成,我们只不过现在选中了这一步。在主屏幕菜单条上,选择“系统(System)”菜单下的“波长(Wavelengths)”。 屏幕中间会弹出一个“波长数据(Wavelength Data)”对话框。ZEMAX 中有许多这样的对话框,用来输入数据和提供你选择。用鼠标在第二和第三行的“使用(Use)”上单击一下,将会增加两个波长使总数成为三。现在,在第一个“波长”行中输入486,这是氢(Hydrogen)F谱线的波长,单位为微米。 ZEMAX全部使用微米作为波长的单位。现在,在第二行的波长列中输入587,最后在第三行输入656。这就是ZEMAX中所有有关输入数据的操作,转到适当的区域,然后键入数据。在屏幕的最右边,你可以看到