第31卷 第12期四川兵工学报2010年12月
收稿日期:2010-09-20
基金项目:陕西省自然科学基金(2007F 34)
作者简介:黄斌科(1974)),男,副教授,主要从事目标信号特征分析研究。
=自动化技术>
基于微多普勒特征的运动步态识别
黄斌科,李 飞
(西安交通大学电子与信息工程学院微波所,西安 710049)
摘要:人的肢体运动会产生微多普勒特征,利用这一特征可以进行人体步态识别。首先对人体进行建模,并利用运动捕捉数据模拟了人运动时的雷达回波。然后利用Ch irplet 变换对人体躯干的平动和肢体微动部分的回波进行了分离,从肢体部分回波中提取了人体运动的步频,并将其作为特征量进行人的运动步态识别。仿真结果表明了利用步频特征识别人体运动步态的有效性,且这一特征不受雷达视线方向与人体运动方向夹角的影响,可以应用于城市反恐等领域。
关键词:微多普勒;运动步态识别;步频;Chirplet 变换中图分类号:TN95
文献标识码:A
文章编号:1006-0707(2010)12-0056-03
运动目标不仅存在整体平动,目标或者目标部件还往往伴随有加速,振动,旋转等非刚体性质的微运动。目标微运动对于雷达散射信号会产生调制作用,在目标多普勒频率附近产生边带,这种现象称为微多普勒现象[1]。人体运动时由于肢体的摆动,具有明显的微运动特征。G eishe-i m er [2]应用运动捕捉证实了人运动回波可以用各个部位单独回波的合成进行模拟,并讨论了各部位的回波特点。L i ng 等[3]对于人的几种典型运动的回波进行模拟和分析,指出人体运动的微多普勒特征可以用于目标识别。J .L i [4]通过对目标雷达信号微多普勒分析和Ch i rplet 分解,分离了旋转部件的微多普勒特征,得到了飞机的IS AR 像和人行走时手臂摆动的周期。
在应用雷达对非合作目标进行探测时,目标运动方向与雷达视线方向往往存在夹角。在这种情况下利用直接测量的目标平动多普勒频率进行速度判断并不能获得准确的速度信息,导致利用这一速度信息进行的步态识别结果不够可靠。对于人群的统计数据表明,行走状态下步频约为118~210H z ,跑的情况下约为3H z ,而且运动步频只与运动类型相关,基本不随运动速度变化[5-6]。本研究利用运动步频作为运动步态的判别特征。
首先给出一个典型的人体模型,利用运动捕捉数据[7]
计算了不同时刻人体各部位的位置,然后仿真了人运动过程的雷达回波。利用Chirplet 自适应分解方法对回波进行分解,在Ch irplet 参数域内分离了躯干的平动和肢体运动,对后者进行自相关处理获得运动步频,通过步频参数进行运动步态识别。
1 人运动雷达回波合成
在计算人体运动的散射回波时,可将人体等效为多个部件组成,各部件散射信号由位于其几何中心散射点的散射信号的矢量合成来表示。因此合成回波的关键问题是计算人体运动中各散射中心的实时位置。基于运动捕捉数据可计算运动过程中不同时刻各散射点的位置,并仿真人运动的雷达回波。1.1 人体运动模型
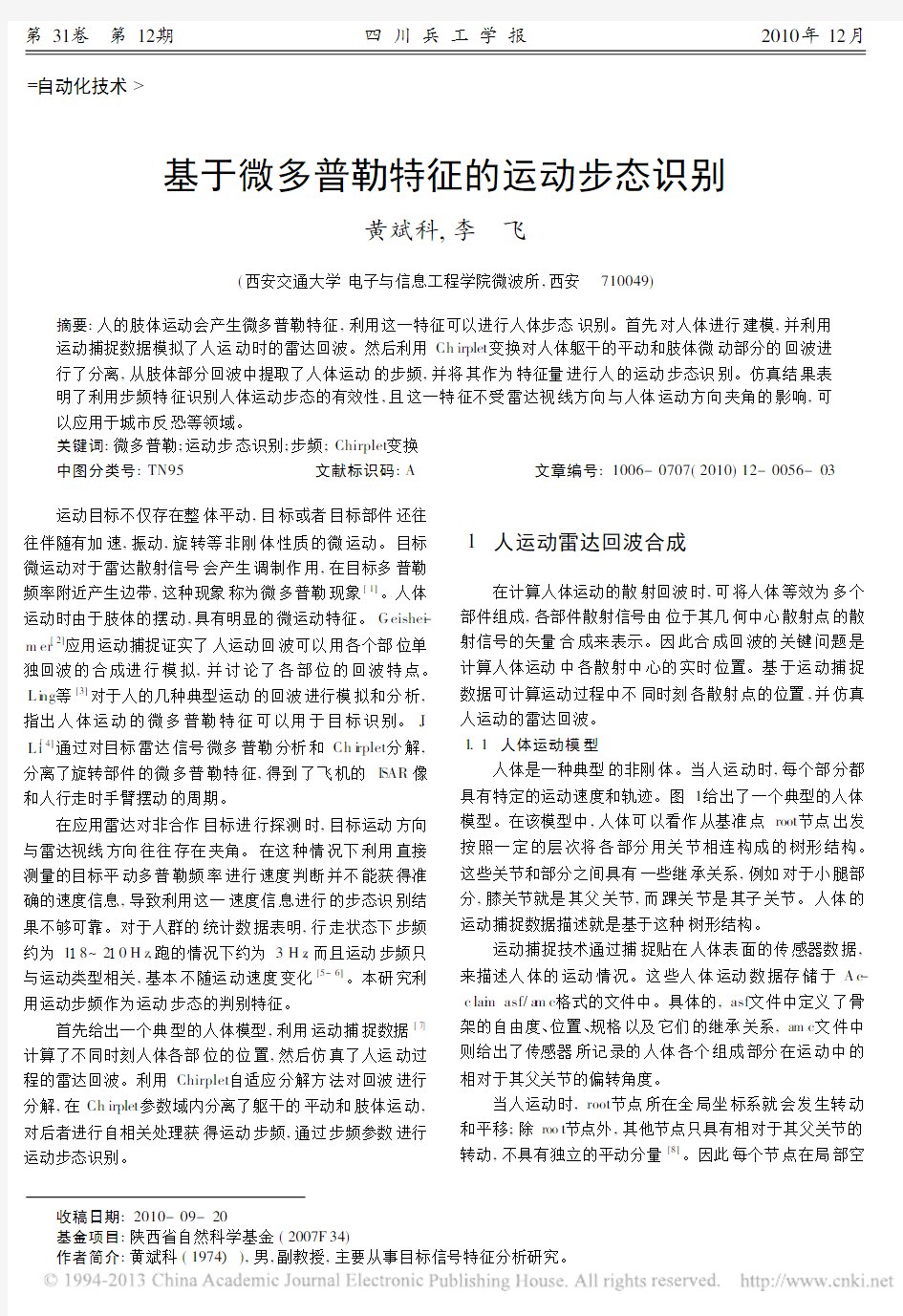
人体是一种典型的非刚体。当人运动时,每个部分都具有特定的运动速度和轨迹。图1给出了一个典型的人体模型。在该模型中,人体可以看作从基准点root 节点出发按照一定的层次将各部分用关节相连构成的树形结构。这些关节和部分之间具有一些继承关系,例如对于小腿部分,膝关节就是其父关节,而踝关节是其子关节。人体的运动捕捉数据描述就是基于这种树形结构。
运动捕捉技术通过捕捉贴在人体表面的传感器数据,来描述人体的运动情况。这些人体运动数据存储于A c -c lai m asf/a m c 格式的文件中。具体的,asf 文件中定义了骨架的自由度、位置、规格以及它们的继承关系,am c 文件中则给出了传感器所记录的人体各个组成部分在运动中的相对于其父关节的偏转角度。
当人运动时,root 节点所在全局坐标系就会发生转动和平移;除roo t 节点外,其他节点只具有相对于其父关节的转动,不具有独立的平动分量[8]。因此每个节点在局部空
间的位置及旋转都是从根节点roo t 直到该节点的一系列节点的状态所决定的。例如肩关节的旋转不仅要影响到上臂的位置和旋转,而且会顺着骨架一直传递到手。这样依次对各关节进行变换,就可以获得人体运动中各部分的实
时位置。
图1 12部件的人体模型
1.2 人运动回波合成
人体的散射信号可以等效为位于各部分几何中心的散射点单独散射信号的合成[2]
。当雷达频率为f 时,得到
的回波可以表示为
E =
E M
m =1
A
m
rect
t -t d,m
T
exp (-j 2P f t d,m )(1)
其中:t d,m =2r d,m /c 代表第m 个散射点的回波时延;r d,m 对应于该部分散射中心到雷达的距离;c 为光速;M =12为总的散射点数目;rect (#)为矩形函数。各散射点的散射强度A m (W )由雷达方程确定
A m =
G K
P t R m
(4P )1.5R 2
m L
(2)
其中:P t 是平均发射功率(W );G 是天线增益;K 是雷达工作波长(m );R m 是该部分的RCS (m 2
);R m 是该部分与雷达的距离(m );L 是系统损耗。
2 人运动回波信号分离
Chirp l e t 信号是是一段通过窄窗抽取或具有某种包络的线性调频波。由于G auss Ch irplet 的W i gner -V ill 分布具有良好的时频聚集性,无交叉项干扰,实际处理中,一般选用G auss Chirplet 作为分解的基函数
g k t =
PA 2
k -14
e
-
t-t k 22A 2k
#e
j 2P f k t
-t k e j B k
2
t-t k 2
(3)
其中:t k 、f k 分别是Chirplet 基函数g k (t )的时间和频率中心;B k 是频率调制斜率;A k 则是基函数在时间轴的伸缩参数。
Chirp l e t 分解是将信号s (t)表示成一系列线性调频基
函数g k (t)的线性和形式,如式(4)所示,即利用Ch irp l e t 在时频平面内的线性时频分解拟合实际信号的时频分布迹线。
s (t)=
E k
B k g
k
(t)(4)
由于人体躯干和肢体部分具有不同的运动特点,拟合人体不同部件运动回波的Ch i rplet 基函数的频率中心参数f k 和调频斜率参数B k 会出现差别,可以利用这些参数差异分离平动和微动部分回波。
1)躯干运动比较平稳,对应的谱图曲线斜率B k 较小,而频率f k 分布集中在平动多普勒频率附近;
2)人体肢体运动的时频谱图分布近似正弦形式,谱图曲线斜率B k 较大,而斜率较小的拐点处f k 则距多普勒频率中心很远。
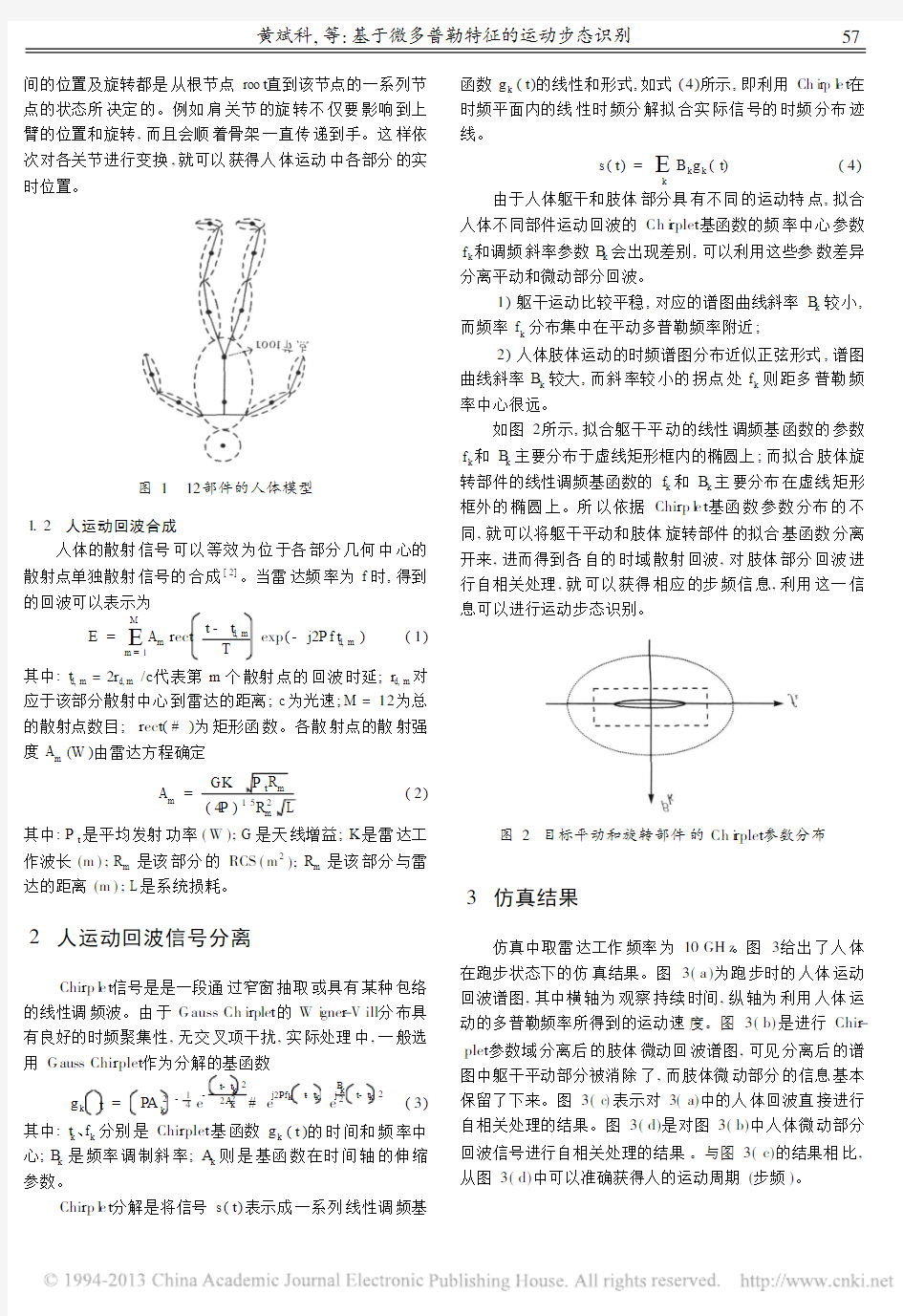
如图2所示,拟合躯干平动的线性调频基函数的参数f k 和B k 主要分布于虚线矩形框内的椭圆上;而拟合肢体旋
转部件的线性调频基函数的f k 和B k 主要分布在虚线矩形框外的椭圆上。所以依据Chirp l e t 基函数参数分布的不同,就可以将躯干平动和肢体旋转部件的拟合基函数分离开来,进而得到各自的时域散射回波
,对肢体部分回波进行自相关处理,就可以获得相应的步频信息,利用这一信息可以进行运动步态识别。
图2 目标平动和旋转部件的Ch i rplet 参数分布
3 仿真结果
仿真中取雷达工作频率为10GH z 。图3给出了人体在跑步状态下的仿真结果。图3(a )为跑步时的人体运动回波谱图,其中横轴为观察持续时间,纵轴为利用人体运动的多普勒频率所得到的运动速度。图3(b)是进行Chir -plet 参数域分离后的肢体微动回波谱图,可见分离后的谱图中躯干平动部分被消除了,而肢体微动部分的信息基本
保留了下来。图3(c)表示对3(a)中的人体回波直接进行自相关处理的结果。图3(d)是对图3(b)中人体微动部分回波信号进行自相关处理的结果。与图3(c)的结果相比,从图3(d)中可以准确获得人的运动周期(步频)。
57
黄斌科,等:基于微多普勒特征的运动步态识别
图3 人跑步状态下的仿真结果
对人行走情况的分析如图4所示,其中图4(a)给出了人体行走回波的谱图,图4(b)给出了对人体行走回波进行分离后,对肢体微动回波信号自相关处理结果,由此可以得到人行走时的运动周期(步频)。从仿真结果可见,对肢体微动所产生的微多普勒信号的自相关分析可得到步频特征,
进而进行步态识别。
图4 人行走状态下的仿真结果
为了说明采用该特征量进行运动步态识别的有效性,图5分别给出了走和跑两种步态各11个样本的特征量,可见其步频具有明显的不同。从这一结果中,可以设定215H z 作为一个参考门限,
利用步频来进行运动步态的识别。
图5 对一组运动步态的步频分析结果
4 结束语
本研究首先利用运动捕捉数据合成了人体在不同运动状态下的雷达回波。然后利用Ch irp l e t 变换对回波信号进行分离,并对分离出的微动目标回波进行自相关处理来获得运动步频,从而基于不同运动步态下步频的差异进行了步态识别。这一方法不受雷达视线方向与目标运动方向夹角影响,具有潜在优势。
(下转第72页)
3结束语
通过对箱体上按孔中心连线为正多边形、对称分布孔阵的电磁耦合规律进行了仿真计算。结果表明,无论孔数及相邻两孔中心间距如何变化都不会影响耦合进各个孔中心的场强大小,且孔中心场强的第一个极大值和极小值所对应的时间差值接近于上升时间的70%;箱体中心的最大场强与孔数不成线性关系,当孔数达到5时场强存在最大值;孔阵中孔排列得越紧密,耦合进箱体内的场强越大;当孔间距变大时,孔与孔之间的互耦效应减弱,耦合进箱体内的场强也变小。进一步分析表明,在箱体上设计孔阵时,应尽量使用孔中心连线为正多边形、对称分布的孔阵,考虑合理的开孔个数,并尽量加大它们之间的间距,以使耦合进箱体内的场强最小。
参考文献:
[1]M endez H A.Shie l d i ng theo ry of enc l osures w ith aper-
tures[J].I EEE T rans on E lectro m agn Co m pa t,1978,
20(2):296-303.
[2]L iM,N uebe l J,D rewn i ak J L,et a.l EM I from cav ity
m odes of shieldi ng enclosures-FDTD M ode li ng and
m easure m ents[J].I EEET ranson E l ec trom agn Co m pa t,
2000,42(1):29-38.
[3]M endez H A.Shie l ding theo ry of enc l osures w it h aper-
tures[J].IEEE T rans on E lectro m agn Compat,1978
(8):98-101.
[4]范颖鹏,杜正伟.不同形状孔阵屏蔽效应的分析[J].
强激光与粒子束,2004,24:1441-1444.
[5]孟萃,陈雨生,王建国.瞬态电磁场对多孔目标耦合
规律的数值研究[J].强激光与粒子束,2000(6):53
-58.
[6]倪光正.工程电磁场原理[M].北京:高等教育出版
社,2004.
[7]何宏.电磁兼容与电磁干扰[M].北京:国防工业出
版社,2007.
[8]邹鹏.电磁兼容原理、技术与应用[M].北京:清华大
学出版社,2007.
[9]周星,王书平,魏光辉.雷电电磁脉冲模拟及对数字
电路的辐照效应[J].兵工自动化,2006(6):79-81.
[10]李淦,代华,王维刚,等.电火工品电磁脉冲危害的测
试实验[J].兵工自动化,2006(11):79-80.
(责任编辑陈松)
(上接第58页)
参考文献:
[1]Chen V C,L i F,H o S,et a.l M icro-D oppler effect in
radar pheno m enon,model and si m u lati on study[J].
IEEE T rans.on AES,2006,42(1):2-21.
[2]Jonathan L.G e is he i m er,Eugene F.G reneker,W illi am
S.M ars ha.l A h i gh-reso l ution D oppler model of hu m an
gait[C]//Proceedi ngs o f SP IE,2002:8-18.
[3]S Ram,H ao L i ng.M i croDopp l er si gna t ure si m ulati on of
co mputer an i m ated hu man and an i m a l motions[C]//An-
tennas and P ropagation Society Internati onal Sy mposi u m,
2008:1-4.
[4]J.L,i H.L ing.A ppli cati on o f adapti ve chirp l et repre-
sentati on for ISAR feature extracti on from targets w ith ro-
tating parts[J].I EE P roc.-R ada r Sonar N av i g.,2003,
150(4):284-291.
[5]A i ka teri n i Pach,i T i anji an J.i F requency and velocity of
peop l e wa l k i ng[J].T he Structura l Eng i neer,2005,83
(3):36-40.
[6]P ete P fi tzi nger.L ab R epo rt:Essenti a l Ing redients V I:
I m prov i ng your str i de rate[EB/OL].[2006-05-28].
http://runni ngti m es.co m/A rtic l e.aspx?A rticleI D
=8732.
[7]C MU G raphics L ab M oti on Capture Da tabase[EB/OL].
[2005-02-12].htt p://mocap.cs.c m https://www.doczj.com/doc/0d4849632.html,.
[8]刘贤梅,李冰,吴琼.基于运动捕获数据的虚拟人动
画研究[J].计算机工程与应用,2008,44(8):113-
114,119.
(责任编辑周江川)
岩土力学与岩土工程学报 沿着Jonk,Rishikesh,India附近的58号高速公路的边坡质量评价及 边坡运动学分析 Tariq Siddique,M.Masroor Alam,M.E.A.Mondal,V.Vishal 关键词:岩体质量评价运动学分析滑坡稳定性分析滑坡的易滑性 摘要:那些位于喜马拉雅山脉中的、连接坐落于偏远的山谷中或山坡上的城镇的道路网,在印度社会经济发展中起着举足轻重的作用。在这种不稳定的地形中对道路和铁路网进行规划,施工甚至维护发展始终是一项具有挑战性的任务,因为这里的地形、地质构造、地层岩性和新构造很复杂。人口和道路建设的不断增加导致了斜坡的失稳,导致了岩体的破环和移动,从而进一步加剧了近期的火山爆发和山洪爆发。边坡易滑性分析是“滑坡灾害评估”和“边坡质量特征”的重要组成部分,指导设计者为道路的结构和其他工程结构预测、选择合适的方法。58号公路中从Rishikesh 到Devprayag段滑坡现象很是常见。对58号公路沿线的Jonk 到Rishikesh段边坡进行了调查,这一段经历了繁重的交通特别是从三月到八月的朝圣期。在边坡岩体质量分级的基础上的调查,表明该地区属于稳定类,并且滑坡敏感性得分值也表明这个地区的边坡不易滑动。我们应该更加关注公路沿线的边坡,以实现更安全和更经济。 1.概况 喜马拉雅造山运动是印度板块和欧亚板块碰撞的结果。该区岩层极度破碎,具有主要的逆冲断层的不连续性,如喜马拉雅正面推力(HFT),主边界断层(MBT)和主中央断层(MCT)。喜马拉雅山脉中的58号公路沿线的滑坡是非常普遍和频繁的自然灾害,并且造成了大量生命和财产的损失。沿着这条公路的边坡失稳了很多次在不同的位置并且变得更易滑动,这都是由于无计划的发展导致的,作为Uttarakhand灾害的见证。众所周知,小喜马拉雅山脉的山坡是不稳定边坡,是由于地貌、降雪、严重和持续的降雨,以及正在进行的新构造活动导致的。最近几年增加的人为活动似乎是一个额外的因素对于喜马拉雅山脉的不稳定边坡。有很多或大或小的山体滑坡发生在不同的地方(Sati等人,2011)。过去几年中在Badarinath 和Rishikesh附近的58号公路为了建造建筑物和进行道路拓宽而进行的无计划开挖和爆破震动降低来人滑坡的稳定性。对Rudraprayag地区的临界边坡进行数值模拟得出其安全系数小于1(Singh等人,2008)。为了更安全的施工和减少边坡的破坏,适当的调查和斜坡特征描述是必需的。边坡特征分析取决于边坡,岩体,气象等相关参数和数据(Pradhan等人,2011,2014;Trivedi 等人,2012)。对58号公路沿线的喜马拉雅山脉中嘉华附近的50个路堑边坡利用边坡岩体质量分级(RMR)和地质强度指标(GSI)分类系统进行稳定性研究来确定其易滑性(Sarkar等人,2012a)。Rishikesh的平均海拔高度是372米(1745英尺)。根据印度Skymet气象部更新最新天气预报,该地区的温度大约是20℃到22℃之间。根据Koppen-Geiger气候分类系统,Rishikesh处在潮湿的亚热带地区。Rishikesh的降雨在不同季节差异明显;最大降水发生从七月九月约490mm,而最小降水量在四月只有10mm。边坡岩体特征是岩土工程研究的必要项目,它的基础是岩石或岩体的不同参数,目的是对不同类型的边坡进行分类和分析其稳定性,从而提出相应的支护措施。所有的内在属性的量化岩体和外部因素作用于斜坡可以用来说明斜坡的现状和预测他们的发展趋势。58号公路是生活在Rishikesh,Devaprayag,Srinagar,Rudraprayag,Gochar,Chamoli 和Joshimath的人们的生命线。据报道,公路沿线的许多滑坡对旅客和朝圣者造成了很多困难。本研究确定了在58号公路沿线的Laxman Jhula和Jonkand Rishikesh附近安全区域和地区的地质灾害的影
触觉感觉统合 触觉感觉统合是指来自身体皮肤表面的感觉能力,它是外在的,以触摸、感觉和操作来反应。个体通过这个触觉系统,体验各种不同的感觉,促使人能更加了解周围环境。例如,触觉感觉统合会使个体区分潮湿和干燥、热和冷、软和硬、平滑和粗糙等特质与属性。 触觉感觉统合可以通过穿笼爬行、走平衡木、在跳床上上下跳跃、爬楼梯、摔跤、翻筋斗或打滚等运动来进行,也可让学生在地板上、草地或细麻布、沙滩、平衡木、球池中赤脚行走;或者爬绳、爬粗绳网等,这些活动均可促进学生的触觉感觉统合。 研究发现,大脑对前庭输入的信息会有过度反应或过低反应现象,过低反应(对前庭信息反应迟钝)的儿童,会减底正向旋转性眼球震颤的现象,结果儿童就难以用视觉追踪移动的物体,粗大动作显得迟缓,不能把外界的指令有效迅速地传人大脑,同时,容易摔跟头,不善于保持平衡。而过度反应前庭信息的儿童,会增加后向旋转性眼球震颤的现象,结果儿童对周围空间过于敏感,会时时担心跌倒,怕高,惧怕瞬间移动或运动,甚至头晕、恶心。 基本上,如果因为前庭系统发展不足而导致空间感觉统合的混淆或扭曲时,表示在一定程度上原始的颈部一右侧反应僵直。颈部一右侧反应会驱使身体强直型旋转运动,而且,产生感觉向心力的现象,就是说过于偏重身体的周围,最终造成身体感觉混淆的症状。同时,也会产生身体外围会向外伸长的感觉,或者担心身体部位从身体的其他部位离开的现象。另外,由于身体一形象的混淆,致使身体缺乏稳定性。研究发现,有50%学习障碍学生曾有耳朵感染疾病的经验,有40%者会产生头晕、恶心的症状,同时,有35%者有晕眩的症状。 眼睛运动不良、身体协调不良、平衡能力异常和空间导向混淆等现象,通常是前庭系统功能失调的症状。除了小脑网状构造和顶骨皮质等器官组织的控制影响外,也反射本体感和视觉的功能。其中,眼球震颤和眼睛不随意振动是前庭系统功能失调最常见的症状。 如果脑部的感觉统合不良,会影响生活中的许多事,常常事倍功半,也较少获得满足感。所有儿童中,大约有百分之五到十,其感觉统合能力上有一定的缺陷,这些缺陷导致学习障
行走原理 六足类的昆虫行走时,一般不是六足同时直线前进,而是将3对足分成两组,以三角形支架结构交替前进。身体左侧的前后足及右侧中足为一组,右侧的前、后足和组侧的中足为另一组,分别组成两个三角形支架。当一组三角形支架中所有的足同时提起,另一组三角形的足原地不动,支撑身体并以中足为支点,前后关节肌肉收缩,拉动身体向前,后足的关节肌肉收缩,将虫体向前推,同时虫体的重心落在另外一组三角形支架的三足上,然后重复前一组的动作,互相轮换周而复始。这种行走方式可以使昆虫随时随地停止下来,因为重心总是落在三角支架内。这就是典型的三角步态走法。运动时六角成两组三角形交替支撑迈步前进。 本设计采用的三角步态运动示意图如图1。接触地面的腿如黑方块所示,形成稳定的三角结构,这样模型通常会保持直立平稳的走资而不会走路时跌跟头。 图1 三角步态运动示意图 六足行走方案的具体分析 下面对这个行走方案做具体的分析。 图2 前进运动步态示意图
前进:前进运动步态示意图如图2,以1,3,5足作为支撑点,2,4,6足向上提起,再向前迈进,然后放下,等着地后,以2,4,6足为支撑点,将1,3,5足向上提起,再向前迈进,然后再放下,这样就完成了向前行走的全套动作。 同理,当向左转的时候,以1,3,5足作为支撑点,2,4,6足向上提起,再向左转,然后放下,等着地后,以2,4,6足为支撑点,将1,3,5足向上提起,再向左旋转,然后再放下,这样就完成了向左旋转的全套动作。 同理,当向右转的时候,以1,3,5足作为支撑点,2,4,6足向上提起,再向右转,然后放下,等着地后,以2,4,6足为支撑点,将1,3,5足向上提起,再向右旋转,然后再放下,这样就完成了向左旋转的全套动作。 要实现很自然的行走还是有难度的,只能做到稍微再把速度加快一点。原来是只有在腿放下往后摆动的瞬间,整体是往前进行一次移动,为加快速度,现在在脚前摆的瞬间,后脚同时增加了一个向后蹬的动作,即多了一个时间点向前移动。因此整体行进速度快了一点。
一、触觉系统的指导 触觉:大脑对外界反映的基础 触觉是感觉刺激中最广泛的和最频繁者,几乎日常生活中、我们都在不断的接受刺激,所以方法和游戏活动也最多 (一)球池游戏:浮力球池,在触觉刺激和前庭刺激有很大益处,敏感的孩子过度紧张,无法忍受球碰触肌肤的感觉更无法在重力不稳的球池中活动(心理障碍) (二)毛巾和软垫游戏:对触觉敏感的孩子刺激帮助很大,尤其是全身承受压力,可以培养自动自发的调节机能。 (三)吹风机、软刷子游戏:吹孩子的敏感部位,长期使用可以协助孩子养成抑制轻微接触刺激的能力。 (四)小豆子或水放入小池中游戏 二、前庭系统的指导 前庭感觉是人类的学习枢纽 触觉敏感通常也有前庭机能不全的问题,导致过分焦虑及紧张,有时引发平衡能力不足及手脚不灵活的问题。自闭症幼儿前庭问题方面明显较为严重。或
许前庭机能不全,造成他们在选择和过滤信息方面异常和困难。 吊缆是处理前厅信息最好的设备,网篮触觉压力较大自闭症患儿较难适应。 摇晃的动作:大约两秒钟一次,吃过饭避免做此活动,以免呕吐,同时注意孩子的脸色、表情、姿态,有眩晕或害怕应立刻停止,刺激过度会有不适应现象,指导者要保持警觉,以免意外。如何孩子适应可多做一会强烈的刺激对孩子的前庭机能的复苏和强化帮助很大。操控时最好间隔做变化,左右、前后速度的快慢也可以做间断性控制,加强趣味性和前庭系统的自我调整。 三、本体感的指导 本体感是一种高度复杂化的神经应变能力,本体感就是学习能力,也是大脑充分掌握自己身体的能力。本体感成熟的最慢,,除非前庭觉及触觉发展正常,本体感才能正常。从简单的吃饭、穿脱衣服、写字、骑车、跳绳等高难度的操作及体能动作都需要本体感的功能
步态分析 第一节概述 一、步态分析的目的 1.确定异常步态的障碍学诊断。 2.确定异常步态的程度。 3.比较不同种类的辅助具(假肢、矫形器)对步态的影响。 二、适应症和禁忌症 (一)适应症 1.中枢神经系统损伤:脑外伤,脑血管意外,脑瘫,帕金森病。 2.骨关节疾病与外伤:截肢,髋关节或膝关节置换术后,关节炎,软组织损伤。 3.下肢肌力损伤:股神经损伤,腓总神经损伤,脊髓灰质炎。 4.其他如疼痛。 (二)禁忌症 1.严重的心肺疾患。 2.下肢骨折未愈合。
第二节正常步态 一、步行周期 步行周期指行走过程中一侧足跟着地至该侧足跟再次着地时所经过的时间。 分为: 1.站立相(stance phase 62%):又称支持相,为足底与地面接触的时期。 2.迈步相(swing phase 38%):又称摆动相,指支持腿离开地面想起摆动的阶段。 二、正常步行周期的基本组成 (一)双支撑期和单支撑期 双支撑期(12%):一侧足跟着地至对侧足趾离地前双腿与地面接触的时期。 每一个步行周期中,有两个双支撑相,即负荷反应期和站立末期。 (二)步行周期分期 1.首次着地 指足跟或足底的其他部位第一次与地面接触的瞬间,此时骨盆旋前5度,髋关节屈曲30度,膝和踝关节中立位。
正常人首次着地方式为足跟着地,病理步态时表现各异:脑瘫患儿可出现脚掌着地,脚后跟疼痛患者可见足底外侧缘或内侧缘着地。 2.负荷反应期(承重期)――双支撑期 指足跟着地后至足底与地面全面接触的一段时间,即一侧足跟着地后至对侧足趾离地。此时,膝关节屈曲达到站立相的最大值。 3.站立中期 指从对侧下肢离地至躯干位于支撑腿正上方时。 4.站立末期 指从支撑腿足跟离地到对侧下肢足跟着地。 5.迈步前期――双支撑期 指从对侧下肢足跟着地到支撑腿足趾离地之前的一段时间。 6.迈步初期 从支撑腿离地至该侧膝关节达到最大屈曲时。 7.迈步中期 从膝关节最大屈曲摆动到小退与地面垂直时。 8.迈步末期
第21卷第4期湖 北 工 业 大 学 学 报2006年08月 V ol.21N o.4 Journal of H ubei U niversity of T echnology Aug.2006 [收稿日期]2006-05-23[作者简介]程 琼(1959-),女,湖北武汉人,湖北工业大学副教授,研究方向:模式识别及计算机控制. [文章编号]1003-4684(2006)0820101203 基于计算机视觉步态识别系统的方法研究 程 琼,庄留杰 (湖北工业大学电气与电子工程学院,湖北武汉430068) [摘 要]对目前步态识别系统的研究方法进行了分析、归类与总结,并在原有的研究方法基础上提出了三维 系统建模与跟踪新方法.计算机视觉技术为步态识别系统提供了强有力的分析工具. [关键词]步态识别;计算机视觉;研究方法[中图分类号]TP391.41 [文献标识码]:A 步态识别作为一种新兴的生物特征识别技术, 当前已成为基于视觉的人体运动分析领域的研究热点.步态识别是一种潜在的行为特征,相关研究已证实它可以用于身份识别. 1 步态识别系统组成 步态识别是从相同行走行为中寻找和提取相应个体的可区分的变化来自动进行身份识别.基于视 觉的步态识别系统,如图1所示,监控摄像机用于捕捉监控领域中的行人,结合背景的自动建模和更新,步态检测用来检测行人.行人在二维或三维空间中被连续跟踪.从跟踪结果中,步态模式的一些个性化特征被相应地提取.结合在步态数据库中已经存储的步态模式,分类器最后给出识别结果 . 2 基于视觉的步态分析 步态作为生物特征的可用性在早期已得到证明,关健是如何利用计算机视觉方法来获取个体运动特征.人体建模的选择对于从图像中识别人的形状,正确分析人的运动是非常重要的.骨架图模型是 以直线近似在关节点处所连接的骨骼来表达人体;立体模型能更好地表达人体,它利用广义锥台、椭圆柱、球等三维模型来描述人体的结构细节[1]. 许多研究将人的运动定义为身体运动的不同姿势.有2种主要方法来建模人的运动:一种是基于模型的方法,即选择人体模型后,该模型的三维结构从图像序列中进行恢复;另一种方法重在确定运动场的特征,而不需结构的重构.运动行为的识别可以认为是时变数据的分类问题. 可以看出,人体建模、跟踪与运动识别技术等视觉方法已为步态分析提供了一种强有力的分析工具. 3 步态识别方法分类 当前的步态识别方法有:1)使用行人的时空模式得到步态特征;2)通过光流分布来提取特征;3)特征化实际运动的外观.而如何紧支有效地表达分割出来的或跟踪的行人是非常重要的,因为它将直接或被进一步分析,以获取用于识别的步态特征. 步态包括2类分量:结构化分量,它捕捉了一个人的身体形状;动态分量,它捕捉人体行走期间的运 动特征.根据分析,步态识别方法一是基于模型或结构的方法,它通常建模人体结构并且提取图像特征来影射它们为模型的结构化分量,或者衍生出人体部分的运动轨迹来识别个体;二是非结构或者基于运动的方法,它通常特征化人体的整个运动模式来获取运动特征,而不考虑潜在的结构[2].
常见的异常步态 葛杰,运动康复治疗师,从事运动损伤,骨关节与脊柱损伤及术后康复16年。01年赴荷兰研修运动疗法及健康管理。曾为多位奥运选手制定康复计划并实施治疗常见的异常步态,听着有点儿绕口,其实标准得题目应该是常见的病理步态: 按异常步态的病理及表现,可分以下各类: (1)短腿步态如一腿缩短超过3.5cm时,患腿支撑时可见同侧骨盆及肩下沉,故又称斜肩步,摆动时则有代偿性足下垂。 (2)关节强直步态下肢各关节挛缩强直时步态随之改变,关节挛缩于畸形姿位时改变更著。如髋关节屈曲挛缩时引起代偿性骨盆前倾,腰椎过伸,步幅缩短,膝屈曲挛缩30°以上时可出现短腿步态。膝伸直挛缩时,摆动时可见下肢外展或同侧骨盆上提出,以防止足趾拖地。踝跖屈挛缩时足跟不能着地,摆动时以增加髋及膝屈曲度来代偿,状如跨槛,故称跨槛步。此时患肢支撑期常有膝过度伸直,可引起膝反曲。 (3)关节不稳步态如先天性髋脱位时步行时左右摇晃如鸭步。 (4)疼痛步态当各种原因引起患难与共肢负重时疼痛时,患者尽量缩短患肢的支撑期,使对侧摆动腿呈跳跃式快速前进,步幅缩短,又称短促步。 (5)肌肉软弱步态①胫前肌步态: 胫前肌无力时足下垂,摆动期用增加髋及膝屈曲度以防足趾拖地,形成跨槛步。②小腿三头肌软弱时支撑后期忠髋下垂,身体向前推进减慢。③股四头肌步态: 在患腿支撑期不能主动维持稳定的伸膝,故患者使身体前倾,让重力线在膝前方通过,从而使膝被动伸直,此时髋微屈可加强臀肌及股后肌群的张力,使股骨下端后摆,帮助被动伸膝。在支撑早期利用膝的持续过伸作为一种代偿性稳定机制常导致膝反曲。如同时有伸髋肌无力,则患者常须俯身用手按压大腿使膝伸直。④臀大肌步态:
三轴加速度传感器的步态识别系统 近年来随着微机电系统的发展,加速度传感器已经广泛应用于各个领域并拥有良好的发展前景。例如在智能家居、手势识别、步态识别、跌倒检测等领域,都可以通过加速度传感器实时获得行为数据从而判断出用户的行为情况。 目前许多智能手机都内置多种传感器,通过预装软件就能够获得较精确的原始数据。本文提出一种基于三轴加速度传感器,用智能手机采集用户数据,对数据进行处理及特征提取获得特征矩阵并分类识别的方法,有效地识别了站立、走、跑、跳四种动作。 人体动作识别处理过程主要包含数据采集、预处理、特征提取和分类器识别数据采集数据采集和发送模块安装在用户端,另一个数据接收模块接在电脑终端上。 由于我们制作的采集模块很轻、很小,所以方便佩戴。当用户运动时,三轴加速度传感器会将据采集并通过无线方式发送给电脑接收模块,再通过电脑上的软件部分对采集到的数据进行分析处理,将结果输出,显示用户的实时状态。 本文使用的加速度传感器数据来自于共计60个样本。传感器统一佩戴于腰间。本文选取了其中一位采集者的数据用于主要分析研究,其余两位采集者的数据则用于验证由第一位采集者数据研究所得的结论,这样的做法既减小了数据处理的繁杂又能保证最终结果的准确性。预处理应用程序设置的采集时间间隔为0.1s,对每一个动作的采集时间为25s。考虑到用户在采集数据一开始与将要结束时的动作
不平稳可能对数据带来较大影响,前2s2s采集的数据将被舍弃不予分析。因原始加速度信号一般都含有噪声,为了提高数据分析结果的准确性,通常在原始加速度信号进行特征提取前对其进行去躁、归一化、加窗等预处理。通过加窗处理,不仅规整了加速度信号的长度,而且方便研究人员按照需要选择适宜的信号长度,这样有利于后续的特征提取。 许多研究人员使所示。研究人员采集的加速度传感器信号由于采集者的动作力度不同造成加速度信号的幅度差异较大,这会对之后的分类识别造成负面影响,归一化技术可以调整加速度信号的幅度,按照一定的归一化算法可以使加速度信号的幅度限定在某一数值范围内,文献[2]在识别跑、站立、跳和走路这四种动作时对四种动作的加速度信号进行了归一化;文献[3]在进行手势识别时对手势动作的加速度信号进行了归一化处理。特征提取特征提取和选择模块的作用在于从加速度信号中提取出那些表征人体行为的特征向量,处于预处理模块和分类器模块之间,是人体行为识别过程中的一个重要环节,直接影响分类识别的效果。特征的提取方法具有多样性,对于不同的识别目的,研究人员会提取不同的特征,例如为了识别分类站立和跑步,研究人员通常会选取方差和标准差这类能够反映加速度信号变化大小的特征,而为了识别分类走路和跑步,研究人员通常会选取能量和均值这类能够反映加速度信号大小的特征。使用不同的特征表征行为会对分类识别效果产生不同的影响,因此寻找更加有效的特征一直是研宄人员关注的一个课题。通过查阅大量的文献,大致可以把加速度信
步态分析 项目七步态分析 第一节概述 一、步态分析的目的 1.确定异常步态的障碍学诊断。 2.确定异常步态的程度。 3.比较不同种类的辅助具(假肢、矫形器)对步态的影响。 二、适应症和禁忌症 (一)适应症 1.中枢神经系统损伤:脑外伤,脑血管意外,脑瘫,帕金森病。 2.骨关节疾病与外伤:截肢,髋关节或膝关节置换术后,关节炎,软组织损伤。 3.下肢肌力损伤:股神经损伤,腓总神经损伤,脊髓灰质炎。 4.其他如疼痛。 (二)禁忌症 1.严重的心肺疾患。 2.下肢骨折未愈合。 第二节正常步态 一、步行周期 步行周期指行走过程中一侧足跟着地至该侧足跟再次着地时所经过的时间。 分为: 1.站立相(stance phase 62%):又称支持相,为足底与地面接触的时期。 2.迈步相(swing phase 38%):又称摆动相,指支持腿离开地面想起摆动的阶段。二、正常步行周期的基本组成 (一)双支撑期和单支撑期 双支撑期(12%):一侧足跟着地至对侧足趾离地前双腿与地面接触的时期。 每一个步行周期中,有两个双支撑相,即负荷反应期和站立末期。 (二)步行周期分期 1.首次着地 指足跟或足底的其他部位第一次与地面接触的瞬间,此时骨盆旋前5度,髋关节屈曲30度,膝和踝关节中立位。 正常人首次着地方式为足跟着地,病理步态时表现各异:脑瘫患儿可出现脚掌着地,脚后跟疼痛患者可见足底外侧缘或内侧缘着地。 2.负荷反应期(承重期)――双支撑期 指足跟着地后至足底与地面全面接触的一段时间,即一侧足跟着地后至对侧足趾离地。此时,膝关节屈曲达到站立相的最大值。 3.站立中期 指从对侧下肢离地至躯干位于支撑腿正上方时。 4.站立末期 指从支撑腿足跟离地到对侧下肢足跟着地。 5.迈步前期――双支撑期 指从对侧下肢足跟着地到支撑腿足趾离地之前的一段时间。
A 圆周运动的运动学特征 一、概念和规律的理解 (一)圆周运动 1、定义:质点沿着圆周所做的运动叫做圆周运动。 2、条件:质点受到向心力的作用,这个向心力不断改变质点运动方向并始终指向圆心。向心力是一个效果力。 3、匀速圆周运动:如果做圆周运动的质点的线速度大小保持不变,这种圆周运动叫做匀速圆周运动。 (二)描述圆周运动的物理量 1、线速度 (1)定义:质点做圆周运动通过的弧长s 和所用时间t 的比值叫做线速度。 (2)计算式:s v t = ,单位为m/s 。 (3)方向:某点线速度的方向即为该点的切线方向。(与半经垂直) (4)物理意义:描述质点沿圆周运动的快慢。 注:对于匀速圆周运动,在任意相等时间内通过的弧长都相等,线速度大小不变,但方向时刻改变。 2、角速度 (1)定义:匀速圆周运动中,连接运动质点和圆心的半径转过的角度?跟所用时间t 的比值,就是质点的角速度。 (2)计算式:=t ? ω ,单位:rad/s (3)物理意义:描述质点绕圆心转动的快慢 注:对于匀速圆周运动,角速度大小不变。 3、周期、频率、转速 (1)周期:做匀速圆周运动的物体,转过一周所用的时间叫做周期。用T 表示,单位为s 。 (2)频率:做匀速圆周运动的物体在1s 内转的圈数叫做频率。用f 表示,其单位为转/秒(或赫兹),符号为r/s (或Hz )。 (3)转速:工程技术中常用转速来描述转动物体上质点做圆周运动的快慢。转
速是指物体单位时间内所转过的圈数,常用符号n 表示,转速的单位为转/秒,符号是r/s ,或转/分(min )。 4、匀速圆周运动中各物理量之间的关系 角速度与线速度的关系:v r ω= 周期与线速度、角速度的关系:22=r T v ππω= 转速与线速度、角速度:122v n T r ωππ= == 二、典型例题 【例1】如图所示,小物体A 与圆盘保持相对静止,跟着圆盘一起做匀速圆周运动,则A 的受力情况是:( ) A 、受重力、支持力 B 、受重力、支持力和指向圆心的摩擦力 C 、受重力、支持力、向心力、摩擦力 D 、以上均不正确 【例2】机器上的转盘匀速转动,每分钟转45圈,离转轴0.1m 处有一个小螺母,求小螺母做圆周运动的周期、角速度、线速度。 【例3】如图所示,皮带传动装置转动后,皮带不打滑,则皮带轮上A 、B 、C 三点的情况是( ) A 、v A =v B ,v B >v C ; B 、ωA =ωB ,v B = v C C 、v A =v B ,ωB =ωc D 、ωA >ωB ,v B =v C 补充知识:同轴传动、皮带传动和齿轮传动 两个或者两个以上的轮子绕着相同的轴转动时,不同轮子上的点具有相同的角速度,通过皮带传动的两个轮子上,与皮带接触的点具有相同的线速度,齿轮传动和皮带传动具有相同的规律。
运动学、静力学、动力学概念 运动学 运动学是理论力学的一个分支学科,它是运用几何学的方法来研究物体的运动,通常不考虑力和质量等因素的影响。至于物体的运动和力的关系,则是动力学的研究课题。 用几何方法描述物体的运动必须确定一个参照系,因此,单纯从运动学的观点看,对任何运动的描述都是相对的。这里,运动的相对性是指经典力学范畴内的,即在不同的参照系中时间和空间的量度相同,和参照系的运动无关。不过当物体的速度接近光速时,时间和空间的量度就同参照系有关了。这里的“运动”指机械运动,即物体位置的改变;所谓“从几何的角度”是指不涉及物体本身的物理性质(如质量等)和加在物体上的力。 运动学主要研究点和刚体的运动规律。点是指没有大小和质量、在空间占据一定位置的几何点。刚体是没有质量、不变形、但有一定形状、占据空间一定位置的形体。运动学包括点的运动学和刚体运动学两部分。掌握了这两类运动,才可能进一步研究变形体(弹性体、流体等)的运动。 在变形体研究中,须把物体中微团的刚性位移和应变分开。点的运动学研究点的运动方程、轨迹、位移、速度、加速度等运动特征,这些都随所选的参考系不同而异;而刚体运动学还要研究刚体本身的转动过程、角速度、角加速度等更复杂些的运动特征。刚体运动按运动的特性又可分为:刚体的平动、刚体定轴转动、刚体平面运动、刚体定点转动和刚体一般运动。 运动学为动力学、机械原理(机械学)提供理论基础,也包含有自然科学和工程技术很多学科所必需的基本知识。 运动学的发展历史 运动学在发展的初期,从属于动力学,随着动力学而发展。古代,人们通过对地面物体和天体运动的观察,逐渐形成了物体在空间中位置的变化和时间的概念。中国战国时期在《墨经》中已有关于运动和时间先后的描述。亚里士多德在《物理学》中讨论了落体运动和圆运动,已有了速度的概念。
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 步态分析仪器(DOC) F-Scan足底压力步态分析仪临床应用现状 [国际骨科学杂志International Journal of Orthopaedics]陈雁西 , 俞光荣正常人足底压力分析的研究进展[中国矫形外科杂志Orthopedic Journal of China] 王明鑫 , 俞光荣足底压力测量技术的发展现状与应用研究 Application and development of foot pressure measurement technology [浙江体育科学 Zhejiang Sport Science] 李建设 , 王立平足底压力式步态分析技术在痉挛型脑性瘫痪儿童步态研究中的应用Gait analysis through plantar pressure measurement in children with spastic cerebral palsy [中华物理医学与康复杂志 Chinese Journal of Physical Medicine and Rehabilitation] 李海 , 丁建新 , 周安艳 , 黄东锋 , 江沁 , 尹运冬青少年女性穿不同鞋行走时足底压力分布研究 Dynamic Analysis on Force Distribution of Foot during Walking for Young Female Wearing Different Kind of Shoes [体育科学 China Sport Science] 吴剑 , 李建设青年女性着高跟鞋平地行走时步态的生物力学研究A Research on kinematics on Young Girls’ walking with High-heel Shoes [体育科研 Sports Science Research] 吴剑 , 李建设糖尿病患者足底压力检测及影响因素探讨 The detections of foot plantar pressure in Chinese normal population and diabetic patients and their influencing factors [中国糖尿病 1 / 6
机器人触觉传感技术的研究 班级:机电113 学号:110201313 姓名:钱娟摘要:机器人触觉传感技术是实现智能机器人的关键技术之一,触觉传感器是机器人与环境直接作用的必要媒介,是模仿人手使之具有接触觉、滑动觉、热觉等感知功能。首先,在深入了解各种触觉传感器设计原理和方法的基础上,利用压电原理和光电原理设计了一种体积小、结构简单、工作可靠、柔韧性好,并可同时检测触觉和滑动信号的三维力机器人触滑觉传感器。其次,对触觉传感头的压电层和结构进行有限元建模分析。最后,引入了自适应模糊控制方法,通过对滑动信号的模糊控制器设计,控制机械手与接触界面的夹持力。 关键词:机器人触觉、触觉传感器、压电原理 1.绪论 触觉是一种复合传感,通过人体表面的温度觉、力觉传感器等提供的复合信息可以识别物体的冷热、尺寸、柔软度、表面形状、表面纹理等特征,为人类感知世界提供了大量有用的信息。 在机器人领域使用触觉传感器的目的在于获取机械手与工作空间中物体接触的有关信息。例如,触觉信息可以用于物体的定位和识别以及控制机械手加在物体上的力。 2.触觉传感器的种类 触觉信息是通过传感器与目标物体的实际接触而得到的,因此,
触觉传感器的输出信号基本上是由两者接触而产生的力以及位置偏移的函数。一般来说,触觉传感器可以分为简单的接触传感器和复杂的触觉传感器。前者只能探测和周围物体的接触与否,只传递一种信息,如限位开关、接触开关等;后者不仅能够探测是否和周围物体接触,而且能够感知被探测物体的外轮廓。 1)压电式触觉传感器 压电式触觉传感器是利用晶体的压电效应进行触觉测量的触觉传感器。通常,这种传感器可以采用多个压电晶体来检测物体的表面轮廓。其工作原理是把多个压电晶体压在被测物体上,如果物体表面的高度不同,各个压电晶体的变形也不同,因此,压电晶体产生的电量和输出电压也不同,检测各压电晶体的输出电压就可以检测物体的表面轮廓。 2)压阻式阵列触觉传感器 对于开关式触觉传感器,阵列密度难以提高,阵列数增加时外接引线也是一个很大的问题。利用敏感材料和硅工艺制作的阵列触觉传感器可使阵列数及阵列密度得到很大的提高,并且减少外界引线,但这种传感器往往缺少应有的柔性,很难较通用地安装到不同形状的应用载体上。 3)成像型触觉传感器 成像型触觉传感器由若干个感知单元组成阵列结构,主要用于感知目标物体的形状。 4)超大规模集成计算传感器阵列
步态识别及其在智能视频监控中的应用 步态识别是一种新兴的生物特征识别技术,它是通过人们走路的姿态进行身份识别,与其它的生物特征识别技术相比,步态识别具有非接触、远距离和不容易伪装等优点,因而它比面像识别更适于智能视频监控系统。本文介绍步态识别的基本工作原理、软件算法、特点及与面像识别的比较、在智能视频监控中的应用及其发展等。 人体生物特征识别是传统的模式识别问题,它是利用人的生理或行为特征进行人的身份识别。指纹、眼虹膜与面像等是第一代生物特征,通常要求近距离的或者接触性的感知,如指纹需要接触指纹扫描仪,眼虹膜需要近距离地捕捉,而面像也不能距离远,否则不能提供足够的分辨率等。显然,在远距离的情况下,上述的人体生物特征将不可能被使用。但是,人的步态仍是可见的,且它可在被观察者没有觉察的情况下从任意角度进行非接触性的感知和度量。因此,步态识别是生物特征识别技术的一个新兴子领域。从视觉监控的观点来看,步态是远距离情况下最有潜力的生物特征,从而引起了国内外广大研究者们的浓厚兴趣。例如美国国防高级研究项目署DARPA在2000年资助的HID(Human Identification at a Distance)计划,它的任务就是开发多模式的、大范围的视觉监控技术以实现远距离情况下人的检测、分类和识别,以增强国防、民用等场合免受恐怖袭击的自动保护能力。 步态识别基本介绍 步态识别是一种新兴的生物特征识别技术,旨在通过人们走路的姿态进行身份识别,与其他的生物识别技术相比,步态识别具有非接触远距离和不容易伪装的优点。在智能视频监控领域,比面像识别更具优势。 步态是指人们行走时的方式,这是一种复杂的行为特征。罪犯或许会给自己化装,不让自己身上的哪怕一根毛发掉在作案现场,但有样东西他们是很难控制的,这就是走路的姿势。英国南安普敦大学电子与计算机系的马克·尼克松教授的研究显示,人人都有截然不同的走路姿势,因为人们在肌肉的力量、肌腱和骨骼长度、骨骼密度、视觉的灵敏程度、协调能力、经历、体重、重心、肌肉或骨骼受损的程度、生理条件以及个人走路的“风格”上都存在细微差异。对一个人来说,要伪装走路姿势非常困难,不管罪犯是否带着面具自然地走向银行出纳员还是从犯罪现场逃跑,他们的步态就可以让他们露出马脚。 人类自身很善于进行步态识别,在一定距离之外都有经验能够根据人的步态辨别出熟悉的人。步态识别的输入是一段行走的视频图像序列,因此其数据采集与面像识别类似,具有非侵犯性和可接受性。但是,由于序列图像的数据量较大,因此步态识别的计算复杂性比较高,处理起来也比较困难。尽管生物力学中对于步态进行了大量的研究工作,基于步态的身份鉴别的研究工作却是刚刚开始。步态识别主要提取的特征是人体每个关节的运动。到目前为止,还没有商业化的基于步态的身份鉴别系统。 下面介绍步态识别的基本工作原理、软件算法、与面像识别的比较及特点、以及它在智能视频监控中的应用等。
临床步态分析-分析方法 (一)临床分析 临床分析是步态评估的基础。实验室的检查结果最终都必须与临床分析结合。 1、内容 (1)病史回顾包括既往手术、损伤、神经病变等病史。 (2)体格检查重点在腱反射和病理反射、肌力和肌张力、关节活动度、感觉(触觉/痛觉/本体感觉)、压痛、肿胀、皮肤状况(溃疡/颜色)等。 (3)步态观察注意全身姿势和步态,包括步行节律、稳定性、流畅性、对称性、重心偏移、手臂摆动、诸关节姿态与角度、患者神态与表情、辅助装置(矫形器、助行器)的作用等(表7-2)。在自然步态观察的基础上,可以要求患者加快步速,减少足接触面(踮足或足跟步行)或步宽(两足沿中线步行),以凸现异常;也可以通过增大接触面或给予支撑(足矫形垫或矫形器),以改善异常,从而协助评估。 (4)诊断性治疗诊断性神经阻滞(局部麻醉剂注射)有助于鉴别肢体畸形的原因和指导康复治疗。关节畸形可以分为动态畸形和静态畸形。动态畸形指肌肉痉挛或张力过高导致肌肉控制失平衡,使关节活动受限,诊断性治疗可明显改善功能。静态畸形指骨骼畸形以及关节或肌肉挛缩导致的关节活动受限,诊断性治疗无变化。 表7-2 步态临床观察要点 步态内容观察要点 步行周期时相是否合理左右是否对称行进是否稳定和流畅 步行节律节奏是否匀称速率是否合理 疼痛是否干扰步行部位、性质与程度与步行障碍的关系发作时间与步行障碍的关系 肩、臂塌陷或抬高前后退缩肩活动度降低 躯干前屈或侧屈扭转摆动过度或不足 骨盆前、后倾斜左、右抬高旋转或扭转 膝关节摆动相是否可屈曲支撑相是否可伸直关节是否稳定 踝关节是否可背屈和蹠屈是否下垂/内翻/外翻关节是否稳定 足是否为足着地跟是否为足趾离地是否稳定 足接触面足是否全部着地两足间距是否合理是否稳定 2、步态障碍的病因和病理基础步态障碍主要表现为活动障碍、安全性降低和疼痛。异常步态的代偿导致步行能耗增加。障碍的主要原因为神经肌肉因素和骨关节因素。 (1) 骨关节因素由于运动损伤、骨关节疾病、先天畸形、截肢、手术等造成的躯干、骨盆、髋、膝、踝、足静态畸形和两下肢长度不一致。疼痛和关节松弛等也对步态产生明显影响。 (2) 神经肌肉因素中枢神经损伤,包括中风、脑外伤、脊髓损伤和疾病、脑瘫、帕金森氏综合症等造成的痉挛步态、偏瘫步态、剪刀步态、共济失调步态、蹒跚步态等。原发性原因主要是肌肉张力失衡和肌肉痉挛;继发性因素包括关节和肌腱挛缩畸形、代偿性步态改变等。外周神经损伤,包括神经丛损伤、神经干损伤、外周神经病变等导致的特定肌肉无力性步态,例如臀大肌步态、臀中肌步态、股四头肌步态等。原发因素为肌肉失神经支配,肌肉无力或瘫痪;继发因素包括肌肉萎缩、关节和肌腱挛缩畸形、代偿性步态改变;儿童患者可伴有继发性骨骼发育异常,导致步态异常。 3、临床观察的局限性 (1)时间局限由于步行速度较快,临床肉眼很难同时观察到瞬间变化的情况,例如足在摆动相的旋转,足跟着地时的旋转倾斜、髋、膝、踝关节角度变化等。
步态识别方法的分类及各类方法的比较 程汝珍1,2 1河海大学计算机及信息工程学院,江苏南京(210098) 2水文水资源与水利工程科学国家重点实验室,江苏南京(210098) E-mail:chengruzhen@https://www.doczj.com/doc/0d4849632.html, 摘要:步态识别是生物特征识别技术中的一个新兴领域,它旨在根据个体的行走方式识别身份。步态识别主要是针对含有人的运动图像序列进行分析处理,所涉及到的几项关键技术包括:视频处理、图像处理、模式识别。步态识别分析可以划分为特征抽取、特征处理和识别分类三个阶段。在最近的文献中已经有许多研究尝试,提出了许多步态识别的具体方法。但国内外尚无将步态识别技术分类,本文提出了步态识别的六类分类法,且初步比较了每类方法的适用范围和优缺点,使读者较为全面了解步态识别技术现状。 关键词:步态识别;分类;适用范围;优缺点;比较 中图分类号:TP391.4 1.引言 步态识别是生物特征识别技术中的一个新兴领域,它旨在根据个体的行走方式识别身份[1]。根据早期的医学研究[2]人的步态有24个不同的分量,在考虑所有的步态运动分量的情况下步态是唯一的。精神物理学[3]中的研究结果显示即使通过受损的步态信息人们也能够识别出身份,这表明在步态信号中存在身份信息。 步态识别主要是针对含有人的运动图像序列进行分析处理,所涉及到的几项关键技术包括:视频处理、图像处理、模式识别[4]。步态识别分析可以划分为特征抽取、特征处理和识别分类三个阶段[5]。 步态识别部分 图1 步态自动识别系统框图 Fig1 the framework of gait automatic recognition system 步态识别系统的一般框架如图所示[6]。监控摄像机首先捕捉监控领域来人的行走视频,然后送入计算机进行检测和跟踪,提取人的步态特征,最后结合已经存储的步态模式进行身份识别。若发现该人是罪犯或嫌疑人,系统将自动发出警告。
常见的异常步态 作者:葛杰,运动康复治疗师,从事运动损伤,骨关节与脊柱损伤及术后康复16年。01年赴荷兰研修运动疗法及健康管理。曾为多位奥运选手制定康复计划并实施治疗 常见的异常步态,听着有点儿绕口,其实标准得题目应该是常见的常见的病理步态:按异常步态的病理及表现,可分以下各类:(1)短腿步态如一腿缩短超过3.5cm 时,患腿支撑时可见同侧骨盆及肩下沉,故又称斜肩步,摆动时则有代偿性足下垂。(2)关节强直步态下肢各关节挛缩强直时步态随之改变,关节挛缩于畸形姿位时改变更著。如髋关节屈曲挛缩时引起代偿性骨盆前倾,腰椎过伸,步幅缩短,膝屈曲挛缩30°以上时可出现短腿步态。膝伸直挛缩时,摆动时可见下肢外展或同侧骨盆上提出,以防止足趾拖地。踝跖屈挛缩时足跟不能着地,摆动时以增加髋及膝屈曲度来代偿,状如跨槛,故称跨槛步。此时患肢支撑期常有膝过度伸直,可引起膝反曲。(3)关节不稳步态如先天性髋脱位时步行时左右摇晃如鸭步。(4)疼痛步态当各种原因引起患难与共肢负重时疼痛时,患者尽量缩短患肢的支撑期,使对侧摆动腿呈跳跃式快速前进,步幅缩短,又称短促步。(5)肌肉软弱步态①胫前肌步态:胫前肌无力时足下垂,摆动期用增加髋及膝屈
曲度以防足趾拖地,形成跨槛步。②小腿三头肌软弱时支撑后期忠髋下垂,身体向前推进减慢。③股四头肌步态:在患腿支撑期不能主动维持稳定的伸膝,故患者使身体前倾,让重力线在膝前方通过,从而使膝被动伸直,此时髋微屈可加强臀肌及股后肌群的张力,使股骨下端后摆,帮助被动伸膝。在支撑早期利用膝的持续过伸作为一种代偿性稳定机制常导致膝反曲。如同时有伸髋肌无力,则患者常须俯身用手按压大腿使膝伸直。④臀大肌步态:伸髋肌软弱时,患者常使躯干用力后仰,使重力线通过髋关节后方以维持被动伸髋,并控制躯干的惯性向前运动。形成仰胸凸肚的姿态。⑤臀中肌步态:髋外展肌软弱时不能维持髋的侧向稳定,故患者在支撑期使上体向患侧变,使重力线在髋关节外侧通过,以便依靠内收肌来维持稳定,同时防止对侧髋部下沉并带动对侧下肢提起及摆动。两侧髋外展肌损害时,步行进上体左右摇摆,状如鸭子,又称鸭步。(6)肌痉挛步态因肌张力过高引起。如:①偏瘫步态:常有患足下垂、内翻、下肢外旋或内旋,膝不能放松屈曲,为了避免足部拖地,摆动时常使患肢沿弧线经外侧回旋向前,故又称回旋步。上臂常呈屈曲内收,摆动停止。临床所见的偏瘫步态可有较多的变异。②剪刀步:又称交叉步,多见于脑瘫或高位截瘫患者。因内收肌痉挛,步行时两髋内收,两膝互相磨擦,步态雀跃不稳。内收肌严重痉挛使两腿交叉难
触觉传感系统技术参数: 1 力反馈系统 ?工作范围:≥ 16 x12x7厘米 ?重量(仅限装置):≤3磅 ?解析度: > 450 像素(~ 0.055毫米) ?最大输出力: 3.3牛 ?连续输出力(24小时): >0.88牛 ?硬度: X 轴 > 7.3 lbs, Y 轴 > 13.4 lbs,Z 轴> 5.9 lbs ?力反馈: x, y, z轴 ?位置传感[机械笔万向节]: x, y, z轴 (数字编码器)[摇摆,倾斜,滚动 (± 5% 线性电位计) ?接口: IEEE 802.3 Ethernet port (USB option) ?支持平台:英特尔或基于amd芯片的个人电脑 ?上门安装调试(提供SDK) ?兼容OpenHaptics工具包 ?一年的硬件售后技术维护服务 2力反馈增强系统 ?工作空间:≥16 x12x12厘米 ?重量:≤6磅 ?解析度: > 1100像素~ 0.023毫米 ?最大输出力:≥ 1.8磅力(7.9 N) ?连续输出力(24小时):≥ 0.4磅力(1.75 N) ?硬度: X轴> 10.8磅,Y轴> 13.6磅,Z轴> 8.6磅 ?力反馈: x,y,z 轴 ?位置传感[机械笔万向节]:x,y,z(数字编码器) [摇摆,倾斜,滚动 (± 3% 线 性电位计)] ?接口: IEEE 802.3 Ethernet port (USB option) ?支持平台:英特尔或基于amd芯片的个人电脑 ?兼容OpenHaptics工具包 ?应用:触觉研究的选择类型、FreeForm? Modeling?系统、FreeForm? Modeling Plus?系统 ?一年的硬件售后技术维护服务