
第五章AVR单片机指令系统
计算机的指令系统是一套控制计算机操作的代码,称之为机器语言。计算机只能识别和执行机器语言的指令。为了便于人们理解、记忆和使用,通常用汇编语言指令来描述计算机的指令系统。汇编语言指令可通过汇编器翻译成计算机能识别的机器语言。
AVR单片机指令系统是RISC结构的精简指令集,是一种简明易掌握﹑效率高的指令系统。
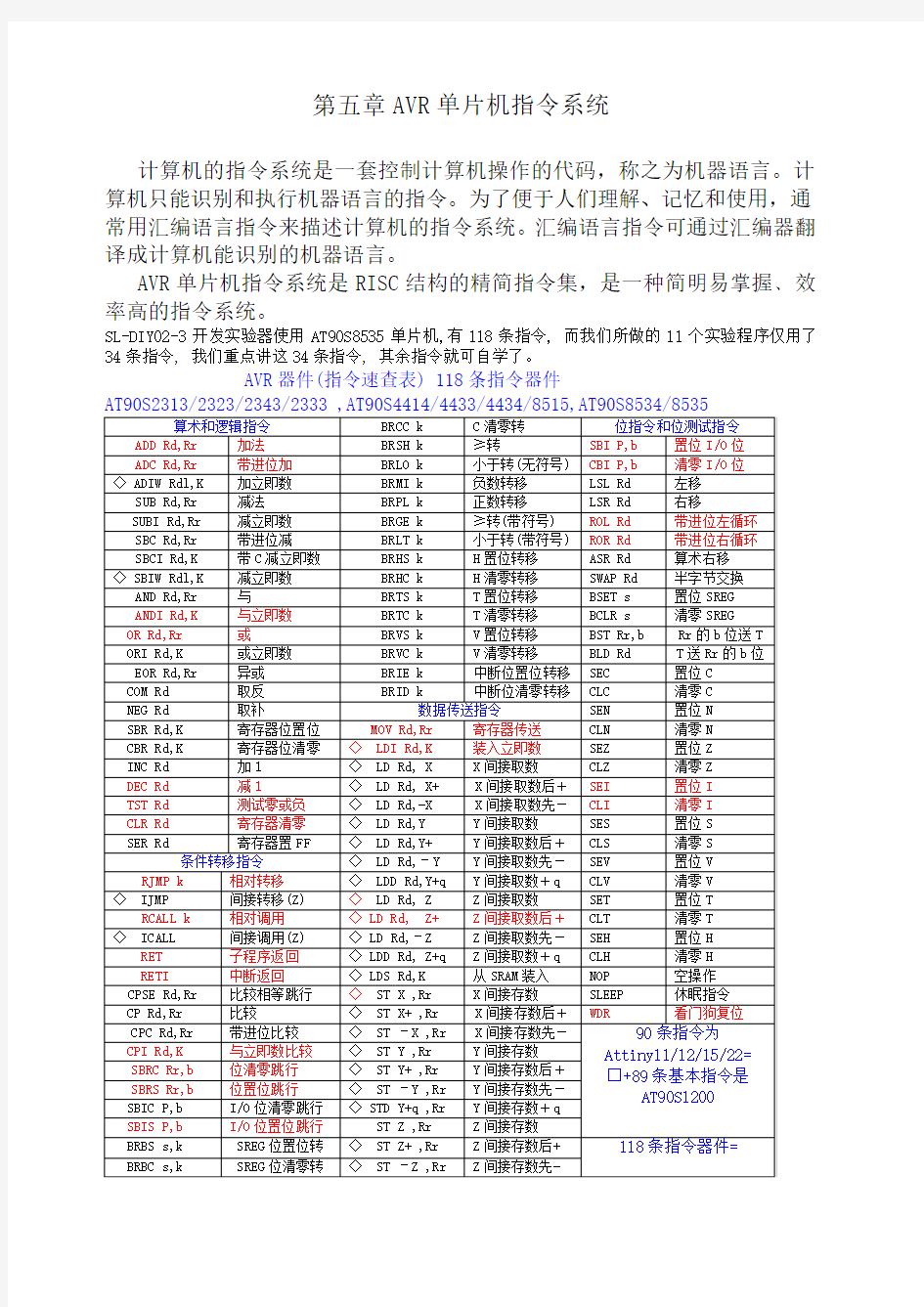
SL-DIY02-3开发实验器使用AT90S8535单片机,有118条指令, 而我们所做的11个实验程序仅用了34条指令, 我们重点讲这34条指令, 其余指令就可自学了。
AVR器件(指令速查表) 118条指令器件
1.不带进位加法
ADD一不带进位加
说明:两个寄存器不带进位C标志加,结果送目的寄存器Rd。
操作: RdRd+ Rr
语法:操作码:程序计数器:
ADD Rd,Rr O≤d≤31,0≤r≤31 PCPC+1 例子:。(实践操作程序实践操作例子*.ASM,必须编译生成*.OBJ文件才可调试,如要修改*.ASM,必须修改文件属性,去掉*.ASM只读文件属性2.带进位加法
ADC-一带进位加
说明:两个寄存器和C标志的内容相加,结果送目的寄存器Rd。
操作: Rd←Rd+Rr+C
语法:操作码:程序计数器:
ADC Rd,Rr 0≤d≤31,0≤r≤31 PC←PC+1
例子:(实践操作程序
3.减1指令
DEC一减1
说明:寄存器Rd的内容减1,结果送目的寄存器Rd中。
操作:RdRd-l
语法:操作码:程序计数器:
DEC Rd 0≤d≤31 PCPC十1 例子:(实践操作程序
4.立即数比较
CPI——带立即数比较
说明:该指令完成寄存器Rd和常数的比较操作。寄存器的内容不改变。该指令后能
使用所有条件转移指令。
操作:Rd-K
语法:操作码:程序计数器:
CPI Rd, K 16≤d≤31, 0≤ K≤255 PCPC + 1
例子:(实践操作程序
5.带立即数与
ANDI——立即数逻辑与 ;全1为1,有0即0
说明:寄存器Rd的内容与常数逻辑与,结果送目的寄存器Rd。
应用: 清0,使某位为0,用0去与;保留,用1去逻辑与;代硬件与门
操作:RdRd·K;
语法:操作码:程序计数器:
ANDI Rd K 16≤d≤31, 0≤K≤255 PCPC+ 1 例子:(实践操作程序
6.寄存器逻辑或
OR一逻辑或;有1即1,全0为0,
应用: 置数,使某位为1,用1去或;保留,用0去逻辑或;代硬件或门
说明:完成寄存器Rd与寄存器Rr的内容逻辑或操作,结果进目的寄存器Rd中。
操作: RdRd ∨ Rr
语法:操作码:程序计数器: OR Rd Rr 0≤d≤31, 0≤r≤31 PCPC+ 1 例子:(实践操作程序
7.清除寄存器
CLR-一寄存器清零
说明:寄存器清零。该指令采用寄存器Rd与自己的内容相异或实现的。寄存器
的所有位都被清零。
操作: RdRd ⊕Rd
语法:操作码:程序计数器:
CLR Rd 0≤d≤31 PCPC+ 1 例子:(实践操作程序
8.相对跳转
RJMP一相对跳转
说明:相对跳转到 PC -2K和 PC+2K(字)范围内的地址。在汇编程序中,标号用于替
代相对操作。AVR微控制器的程序存储器空间不超过4K字(8K字节),该指令能寻址整个
存储器空间的每个地址位置。
操作: PC(PC+1)+ k
语法:操作码:程序计数器:
RJMP k — 2K≤k≤2K PC(PC+1)+k 例子:(实践操作程序
9.相等转移
BREQ相等转移
说明:条件相对转移,测试零标志(Z),如果 Z位被置位,则相对PC 值转移。如果在执行CP、CPI、SUB或SUBI指令后立即执行该指令,且当寄存器Rd中无符号或有符号二进制数与寄存器 Rr中无符号或有符号H进制数相等时,转移将发生。
操作:If Rd=Rr(z=1)then PC(PC十1)+k,PCPC十1
语法:操作码:程序计数器:
BREQ k -64≤k≤+63 PC(PC+ 1)+ k
PCPC+ l
例子:(实践操作程序
10.不相等转移
BRNE——不相等转移
说明:条件相对转移,测试零标志(Z),如果Z位被清零,则相对PC 值转移。如果在执行CP。CPI、SUB或SUBI指令后立即执行该指令,且当在寄存器Rd中的无符号或带符号二进制数不等于寄存器Rr中的无符号或带符号二进制数时,转移将发生。该指令相对PC转移的方向为:PC- 64≤目的≤PC+ 63。参数K为PC的偏移,用2的补码表示(相当于指令BRBCIK)。
操作, If Rd≠Rr(Z=0) then PC(PC+1)+k,elesPCPC+1
语法:操作码:程序计数器:
BRNE k -64≤ k ≤+63 PC(PC+1)+ k
PCPC+l 例子:(实践操作程序
11.寄存器位清零跳行
SBRC一寄存器位被清零跳行
说明:该指令测试寄存器某位,如果该位被清零,则跳下一行执行指令。
操作:If Rd(b)= 0 then PCPC+2(or 3)eles PCPC+ 1
语法:操作码:程序计数器:
SBRC Rr,b 0≤ r≤ 31, 0≤ b≤7 PCPC十1
pCpC+ 2
PCPC+ 3
例子:(实践操作程序
12.寄存器位置位跳行
SBRS一寄存器位置位跳行
说明:该指令测试寄存器某位,如果该位被置位,则
跳下一行执行指令。
操作: If Rr(b)=l then PCPC+ 2(or 3)eles
PCPC+ l
语法:操作码:程序计数器:
SBRS Rr,b ≤r≤31,0≤b≤7 PCPC+1
PCPC+2
PCPC+3
例子:(实践操作程序
13.I/O寄存器位置位跳行
SBIS-I/O寄存器的位置位跳行
说明:该指令测试1/O寄存器某位,如果该位被置位,则跳一行执行指令。该指令在低
32个1/O寄存器内操作,地址为0~31。
操作: If I/OP, b=l then PCPC+2(or 3)
else PCPC+1
语法:操作码:程序计数
器:
SBIS p ,b 0≤ P≤ 31, 0≤ b≤ 7 PCPC+ 1
PCPC+ 2
PCPC+ 3
例子:(实践操作程序
14.相对调用
RCALL——相对调用于程序
说明:在PC+1后(2K字(4K字节)范围内调用子程序。返回地址(RCALL 后的指令地址)存储到堆栈(见CALL)。
操作:PC(PC+1)+k
语法:操作码:程序计数器:
RCALL k -2K≤ k ≤2K PC(PC+1)+ k 例子: (实践操作程序
15.从子程序返回
RET——子程序返回
说明:从子程序返回。返回地址从堆栈中弹出。
操作: PC(15-0)STACK
PC(21-0)STACK
语法:操作码:程序计数器:堆栈: RET None See Operation SPSP+ 2 RET None See Operation SPSP+ 3 例子:(实践操作程序见
16.从中断程序返回
RETI——中断返回
说明:从中断程序中返回。返回地址从堆栈中弹出,且全局中断标志被
置位。
注意:1.主程序应跳过中断区,防止修改补充中断程序带来麻烦;
2.不用的中断入口地址写上RETI-中断返回,有抗干扰作用;
操作: PC(15-0)STACK
PC(21-0)STACK
语法:操作码:程序计数器:堆栈:
RETI None See Operation SPSP十
2
RETI None See Operation SPSP +
3
例子:( 程序,摘自”乐曲.ASM”部分程序,仅供参考),能执行程序请阅”乐曲.ASM”程序及
AVR单片机在儿童智能玩具中的应用--音乐玩具(电脑放音机)一文
17.寄存器拷贝数据
MOV寄存器拷贝
说明:该指令将一个寄存器拷贝到另一个寄存器。源寄存器Rr的内容
不改变,而目的
寄存器Rd拷贝了Rr的内容。
操作:Rd ← Rr
语法:操作码:程序
计数器:
MOV Rd Rr 0≤d≤31,0≤r≤31 PCPC+ 1
例子:(实践操作程序
18.SRAM数据直接送寄存器
LDS直接从SRAM装入
说明:把SRAM中1个字节装入到寄存器。必须提供一个16位地址。存
储器访问被
限制在当前64K字节的SRAM页。超过64K字节,LDS指令使用RAMPZ寄存器
访问。
操作:Rd(k)
语法:操作码:程序计
数器:
LDS Rd k 0≤ d≤ 31,0≤ k≤65535 PCPC+
2
例子:(实践操作程序
19.寄存器数据直接送SRAM
STS寄存器数据直接送SRAM
说明:将寄存器的内容直接存储到SRAM。必须提供一个16位的地址。
存储器访问被限
制在当前64K字节的SRAM页。STS指令使用RAMPZ寄存器访问存储器可超过
64K字节。
操作:(k)Rr
语法:操作码:程
序计数器:
STS k,Rr 0≤r≤31,0≤k≤65535 PCPC+2
例子:(实践操作程序与相同)
20.立即数送寄存器
LDI——装入立即数
说明:装入一个8位立即数到寄存器R16~R31中。
操作:RdK
语法:操作码:程序计
数器:
LDI Rd K 16≤ d≤ 31, 0≤K≤ 255 PCPC+
2
例子:(实践操作程序
21.使用变址Z间接将SRAM中的内容传送到寄存器
LD(LDD)——使用变址Z间接将SRAM中的内容传送到寄存器
说明:带或不带偏移间接从SRAM中传送一个字节到寄存器,SRAM中的
位置由寄存器区中的 Z(16位)指针寄存器指出。存储器访问被限制在当前
64K字节的 SRAM页中。为访问另外SRAM页,则 I/O范围内的寄存器RAMPZ
需改变。在指令执行后,Z指针寄存器值要么不改变,要么就加1或减1操
作。使用Z指针寄存器的这些特性,特别适合于堆栈指针,因为Z指针寄存
器能用于直接子程序调用,直接跳转和查表。Z指针寄存器用作为专用堆栈
指针要比X、Y指针方便。
用Z指针在程序存储器中查表,可参见LPM指令。
操作:Rd(Z)
Rd(Z)
Z Z-1
Rd (Z+q)
语法:操作码:操作流程: 程序计数器:
LD Rd,Z 0≤ d≤31 送数,Z指针不改变 PCPC+1 LD Rd Z+ 0≤d≤31 先送数,后Z指针加1 PCPC+1
LD Rd,-Z 0≤d≤31 先Z指针减1, 后送数 PCPC+l
LDD Rd Z+q 0≤ d≤31,先Z指针加q,后送数, PCPC+1
0≤q≤63 执行后Z指针(Z不含q)不变
例子:(实践操作程序
22. LPM——装入程序存储器
说明:将Z寄存器指向的一个字节传送到寄存器0(RO)。该指令使100 %
空间有效,常
量初始化或常数取数特别有用。程序存储器被编为16位字,Z(16位)指针
的最低位(LSB)选
择为0是低字节,选择为1是高字节。该指令能寻址程序存储器第一个64K
字节(32字)。
操作:R0(Z)
语法:操作码:程序计数器: LPM None PCPC+ 1 例子:(实践操作程序,更详细资料阅”按钮猜数.ASM”)
23.I/O口数据传送到寄存器
IN——I/O口数据传送到寄存器
说明:将I/O空间(口,定时器,配置寄存器等)的数据传送到寄存
器区中的寄存器Rd中。
操作:RdP
语法:操作码:程序计数器: IN Rd P O≤ d≤31, 0≤ P≤63 PCPC+ 1 例子:(实践操作程序
24.寄存器数据送 I/ O口
OUT寄存器数据送 I/O口
说明:将寄存器区中寄存器 Rr的数据传送到 I/0空间(口、定时器、配置寄存器等)。
操作: P Rr
语法:操作码:程序计数器:
OUT P, Rr 0≤ r≤31, 0≤ P≤63 PCPC十1 例子:(实践操作程序
25.进栈指令
PUSH——压寄存器到堆栈
说明:该指令存储寄存器Rr的内容到堆栈。
操作: STACKRr
语法:操作码:程序计
数器:
PUSH Rr O ≤ d ≤31 PCPC+1 SPSP- 1
例子:(实践操作程序
26.出栈指令
POP——堆栈弹出到寄存器
说明:该指令将堆栈中的字节装入到寄存器Rd中。
操作:RdSTACK
语法:操作码:程序计数器:
POP Rd 0 ≤ d ≤31 PCPC+1 SPSP+ 1 例子:(实践操作程序
27.通过进位左循环
ROL—通过进位左循环
说明:寄存器Rd的所有位左移1位,C标志被移到Rd的第0位,Rd的
第7位移到C标志。
操作:
语法:操
作码:程序
计数器:
ROL Rd 0
≤ d ≤31 PCPC+ 1
例子:(实践操作程序
28.ROR——通过进位右循环
说明:寄存器Rd的所有位右移1位,C标志被移到Rd的第7位,Rd的
第0位移到C
标志。
操作:
语法:操作码:
程序计数器:
ROR Rd 0 ≤ d
≤31 PCPC+ 1 例子: (实践操作程序
29.置I/O寄存器的位
SBI——置I/O寄存器的位
说明:对I/O寄存器指定的位置位,该指令在低32个I/O寄存器内
操作,I/O寄存器地
址为0~31。
操作:I/O( P b)1
语法:操作码:程序计数器:
SBIP,b 0≤P≤31,0≤b≤7 PCPC+1 例子: out $1e,r0 ;(EEARL寄存器)←(R0)
sbi $1c,0 ;( EECR寄存器 0位)1
30.清I/O寄存器的位
CBI——清I/O寄存器的位
说明:清零I/O寄存器中的指定位,该指令用在寄存器最低的32个I /O寄存器上,I/O
寄存器地址为 0~31。
操作:I/O(P,b)0
语法:操作码:程序计数器: CBI P, b 0≤ P≤31, 0≤b≤7 PCPC十1 例子: cbi $18,7 ; I/O(PORTB寄存器的7位)0
31.置进位位
SEC一置位进位标志
说明:置位SREG(状态寄存器)中的进位标志(C)。
操作:C1
语法:操作码:程序计数器:
SEC N0ne PCPC+ 1
C:1
例子: sec ; C1
adc r0, r1 ;带进位位加
32.触发全局中断位
SEI——置位全局中断标志
说明:置位SREG(状态寄存器)中的全局中断标志(I)。
操作:I1
语法:操作码:程序计数器:
SEI None PCPC+ 1
I:1
例子: cli ; I0
in r13,$16 ;(r13)←(PINB寄存器数据)
set ; I1
33.禁止全局中断位
CLI——清零全局中断标志
说明:清除SREG(状态寄存器)中的全局中断标志(I)。
操作:I0
语法:操作码:程序计数器: CLI None PCPC+ 1
I:0
例子:(实践操作程序
34.看门狗复位
WDR——看门狗复位
说明:该指令复位看门狗定时器,在 WD预定比例器给出限定时间内必
须执行。参见看门狗定时器硬件部分。
应用:抗干扰;延时
操作: WD timer restart.
语法:操作码:程序计数器: WDR N0ne PC~PC+ 1 例子:(实践操作程序
1.请观看多媒体指令系统讲座
2.实际操作一次: 按对应程序操作实
践!
第五章AVR单片机指令系统 计算机的指令系统是一套控制计算机操作的代码,称之为机器语言。计算机只能识别和执行机器语言的指令。为了便于人们理解、记忆和使用,通常用汇编语言指令来描述计算机的指令系统。汇编语言指令可通过汇编器翻译成计算机能识别的机器语言。 AVR单片机指令系统是RISC结构的精简指令集,是一种简明易掌握﹑效率高的指令系统。 SL-DIY02-3开发实验器使用AT90S8535单片机,有118条指令, 而我们所做的11个实验程序仅用了34条指令, 我们重点讲这34条指令, 其余指令就可自学了。 AVR器件(指令速查表) 118条指令器件
1.不带进位加法 ADD一不带进位加 说明:两个寄存器不带进位C标志加,结果送目的寄存器Rd。 操作: RdRd+ Rr 语法:操作码:程序计数器: ADD Rd,Rr O≤d≤31,0≤r≤31 PCPC+1 例子:。(实践操作程序实践操作例子*.ASM,必须编译生成*.OBJ文件才可调试,如要修改*.ASM,必须修改文件属性,去掉*.ASM只读文件属性2.带进位加法 ADC-一带进位加 说明:两个寄存器和C标志的内容相加,结果送目的寄存器Rd。 操作: Rd←Rd+Rr+C 语法:操作码:程序计数器: ADC Rd,Rr 0≤d≤31,0≤r≤31 PC←PC+1 例子:(实践操作程序 3.减1指令 DEC一减1 说明:寄存器Rd的内容减1,结果送目的寄存器Rd中。 操作:RdRd-l 语法:操作码:程序计数器: DEC Rd 0≤d≤31 PCPC十1 例子:(实践操作程序 4.立即数比较 CPI——带立即数比较 说明:该指令完成寄存器Rd和常数的比较操作。寄存器的内容不改变。该指令后能 使用所有条件转移指令。 操作:Rd-K 语法:操作码:程序计数器: CPI Rd, K 16≤d≤31, 0≤ K≤255 PCPC + 1
关于习题二答案-单片机的指令系统
1、执行下列3条指令后,30H单元的内容是( C )。 MOV R0,#30H MOV 40H,#0EH MOV @R0,40H A)40H B)30H C)0EH D)FFH 2、在堆栈中压入一个数据时(B)。 A)先压栈,再令SP+1 B)先令SP+1,再压栈 C)先压栈,再令SP-l D)先令SP-1,再压栈 3、在堆栈操作中,当进栈数据全部弹出后,这时的SP应指向 A 。 A)栈底单元 B)7FH
C)栈底单元地址加1 D)栈底单元地址减l 4、指令MOVC A,@A+PC源操作数的寻址方式是 D 。 A)寄存器寻址方式B)寄存器间接寻址方式 C)直接寻址方式D)变址寻址方式 5、ANL 20H,#30H指令中,源操作数的寻址方式是 A 。 A)立即寻址方式B)直接寻址方式 C)位寻址方式D)相对寻址方式 6、ANL C,/30H指令中,源操作数的寻址方式是 C 。
A)立即寻址方式 B)直接寻址方式 C)位寻址方式 D)相对寻址方式 7、Jz rel指令中,操作数rel的寻址方式是 D 。 A)立即寻址方式 B)直接寻址方式 C)位寻址方式 D)相对寻址方式 8、Jz rel指令中,是判断 A 中的内容是否为0。 A)A B) B C) C D)PC 9、MOVX A,@DPTR指令中源操作数的寻址方式是(B)
A)寄存器寻址(B)寄存器间接寻址(C)直接寻址(D)立即寻址 10、下面条指令将MCS-51的工作寄存器置成3区(B) A)MOV PSW,#13H (B)MOV PSW,#18H 11、MOV C,00H指令中源操作数的寻址方式是(A) A)位寻址B)直接寻址 C)立即寻址 D)寄存器寻址 1、8051单片机共有7 种寻址方式。访问外部数据存储器应采用寄存器间接寻址方式。 2、访问外部数据存储器应采用寄存器间接寻址方式;查表应使用变址寻址方式。 3、在8051单片机中,堆栈操作的指令有PUSH 和 POP两个。 4、在8051单片机中,子程序调用的指令有ACALL 和 LCALL两个。 5、CJNE指令都是 3字节字节指令。
AVR单片机指令系统 计算机的指令系统是一套控制计算机操作的代码,称之为机器语言。计算机只能识别和执行机器语言的指令。为了便于人们理解、记忆和使用,通常用汇编语言指令来描述计算机的指令系统。汇编语言指令可通过汇编器翻译成计算机能识别的机器语言。 AVR单片机指令系统是RISC结构的精简指令集,是一种简明易掌握﹑效率高的指令系统。 SL-DIY02-3开发实验器使用AT90S8535单片机,有118条指令, 而我们所做的11个实验程序仅用了34条指令, 我们重点讲这34条指令, 其余指令就可自学了。 AVR器件(指令速查表) 118条指令器件 AT90S2313/2323/2343/2333 ,AT90S4414/4433/4434/851 5,AT90S8534/8535算术和逻辑指令 BRCC k
C清零转 位指令和位测试指令ADD Rd,Rr 加法 BRSH k ≥转 SBI P,b 置位I/O位ADC Rd,Rr 带进位加
BRLO k 小于转(无符号) CBI P,b 清零I/O位◇ ADIW Rdl,K 加立即数 BRMI k 负数转移
LSL Rd 左移SUB Rd,Rr 减法 BRPL k 正数转移 LSR Rd 右移SUBI Rd,Rr
减立即数 BRGE k ≥转(带符号) ROL Rd 带进位左循环SBC Rd,Rr 带进位减 BRLT k 小于转(带符号)
ROR Rd 带进位右循环SBCI Rd,K 带C减立即数 BRHS k H置位转移 ASR Rd 算术右移◇ SBIW Rdl,K
一、填空题 1、寻址是指( )。80C51单片机指令系统有7种寻址方式,分别是:( )。 2、访问内部RAM可以采用的两种寻址方式为:( )和( )。 3、MCS-51单片机指令的基本格式为:( )。 4、Rn代表( ),其中n的取值范围是( );Ri代表( ),其中i的取值范围是( )。@Ri的含义是( )。 5、在单片机指令中,30H和#30H的区别是( );R0和@ R0的区别是( );A←R1 和A←(R1) 的区别是( );DPTR和@DPTR的区别是( )。 6、汇编是指由( )“翻译”为( )的过程。 7、常用的伪指令有8条,试写出其中的5条( )、( )、( )、( )、( )。 8、LJMP指令的转移范围是(); AJMP指令的转移范围是(); SJMP指令的转移范围是()。 二、简答题 1、指出下列指令中的操作数的寻址方式。 (1)MOV R0,#30H (2)MOV A,30H (3)MOV A,@R0 (4)MOV @R0,A (5)MOVC A,@A+DPTR (6)CJNE A,#00H,30H (7)MOV C,30H (8)MUL AB (9)MOV DPTR,#1234H (10)POP ACC 2、80C51指令中,常用字符代表立即数或存储单元,试判断下列字符ABC的含义。(1)MOV A,#ABC (2)MOV A,ABC (3)MOV C,ABC (4)MOV DPTR,#ABC 3、若R0=11H,(11H)=22H,(33H)=44H,写出执行下列指令后的结果。 (1)MOV A,R0 (2)MOV A,@R0 (3)MOV A,33H (4)MOV A,#33H 4、若A=11H,(11H)=22H,B=44H,写出执行下列指令后的结果。 (1)MOV R1,A (2)MOV R3,11H (3)MOV R3,#11H (4)MOV R3,B 5、若A=11H,R0=33H,(22H)=66H,(33H)=44H,写出执行下列指令后的结果。 (1)MOV 40H,A (2)MOV 40H,R0 (3)MOV 40H,@R0 (4)MOV 40H,22H (5)MOV 40H,#22H 6、若A=11H,R0=33H,(22H)=66H,(33H)=44H,写出执行下列指令后的结果。 (1)MOV @R0,A (2)MOV @R0,22H (3)MOV @R0,#22H 7、若 A=11H,R0=33H,B=44H,(11H)=22H,(22H)=66H,(33H)=44H,分别写出执行下列指令后的结果。 (1)MOV A,R0 (2)MOV B,#55H (3)MOV 40H,@R0 (4)MOV 11H,22H (5)MOV @R0,22H 8、试将30H、R7、B、A、PSW、DPTR中的数据依次压入堆栈。并指出每次堆栈操作后,SP=?、(SP)=?设原SP=60H,当前工作寄存器区为0区,(30H)=11H,R7=22H,B=33H,A=44H,PSW=55H,DPTR=6677H。 9、若A=78H,R0=34H,(34H)=DCH,(56H)=ABH,求分别执行下列指令后A和Cy中的数据。 (1)ADD A,R0 (2)ADDC A,@R0 (3)ADD A,56H (4)ADD A,#56H
8051 单片机指令系统
难点
MCS-51 单片机的寻址方式 数据传送指令和算术运算指令的使用 位操作和控制转移类指令的使用
要求
掌握:
MCS-51 单片机的寻址方式 指令系统的基本格式 指令系统的操作功能
了解:
指令系统的基本格式 操作数的使用方法 指令系统的操作过程
2.7.1
MCS-51 单片机指令格式
计算机的指令系统是表征计算机性能的重要指标,每种计算机都有自己的指令系统. MCS—51 单片机的指令系统是一个具有 255 种代码的集合,绝大多数指令包含两个基本部 分:操作码和操作数.操作码表明指令要执行的操作的性质;操作数说明参与操作的数据或 数据所存放的地址. MCS—51 指令系统中所有程序指令是以机器语言形式表示,可分为单字节,双字节, 三字节 3 种格式. 用二进制编码表示的机器语言由于阅读困难, 且难以记忆. 因此在微机控制系统中采用 汇编语言指令来编写程序.本章介绍 MCS—51 指令系统就是以汇编语言来描述的.
表 1 汇编指令与指令代码
代码字节 单字节 单字节 双字节 三字节
指令代码 84 A3 7410 B440 rel
汇编指令 DIV AB INC DPTR MOV A,#10H CJNE A,#40H,LOOP
指令周期 四周期 双周期 单周期 双周期
一条汇编语言指令中最多包含 4 个区段,如下所示: 标号: 操作码 目的操作数,源源操作数 ;注释
标号与操作码之间": "隔开; 操作码与操作数之间用"空格"隔开; 目的操作数和源源操作数之间有", "分隔; 操作数与注释之间用"; "隔开. 标号是由用户定义的符号组成,必须用英文大写字母开始.标号可有可无,若一条指令 中有标号,标号代表该指令所存放的第一个字节存储单元的地址,故标号又称为符号地址, 在汇编时,把该地址赋值给标号. 操作码是指令的功能部分,不能缺省.MCS—51 指令系统中共有 42 种助记符,代表了 33 种不同的功能.例如 MOV 是数据传送的助记符. 操作数是指令要操作的数据信息.根据指令的不同功能,操作数的个数有 3,2,1 或没 有操作数.例如 MOV A,#20H,包含了两个操作数 A 和#20H,它们之间用","隔开. 注释可有可无, 加入注释主要为了便于阅读, 程序设计者对指令或程序段作简要的功能说明, 在阅读程序或调试程序时将会带来很多方便.
2.7.2
寻址方式
所谓寻址方式,通常是指某一个 CPU 指令系统中规定的寻找操作数所在地址的方式, 或者说通过什么的方式找到操作数.寻址方式的方便与快捷是衡量 CPU 性能的一个重要方 面,MCS—51 单片机有七种寻找方式.
1
立即数寻址
立即寻址方式是操作数包括在指令字节中,指令操作码后面字节的内容就是操作数本 身,其数值由程序员在编制程序时指定,以指令字节的形式存放在程序存储器中.立即数只 能作为源操作数,不能当作目的操作数. 例如: MOV A,#52H ;A←52H MOV DPTR,#5678H ;DPTR←5678H 立即寻址示意图如 1 所示.
图 1 立即寻址示意图
第3章AT89C51单片机指令系统 难点 ?MCS-51单片机的寻址方式 ?数据传送指令和算术运算指令的使用 ?位操作和控制转移类指令的使用 要求 掌握: ?MCS-51单片机的寻址方式 ?指令系统的基本格式 ?指令系统的操作功能 了解: ?指令系统的基本格式 ?操作数的使用方法 ?指令系统的操作过程 3.1 MCS-51单片机指令格式 3.2 寻址方式 3.3 指令系统 3.1 MCS-51单片机指令格式 计算机的指令系统是表征计算机性能的重要指标,每种计算机都有自己的指令系统。MCS—51单片机的指令系统是一个具有255种代码的集合,绝大多数指令包含两个基本部分:操作码和操作数。操作码表明指令要执行的操作的性质;操作数说明参与操作的数据或数据所存放的地址。 MCS—51指令系统中所有程序指令是以机器语言形式表示,可分为单字节、双字节、三字节3种格式。 用二进制编码表示的机器语言由于阅读困难,且难以记忆。因此在微机控制系统中采用汇编语言指令来编写程序。本章介绍MCS—51指令系统就是以汇编语言来描述的。 表3-1汇编指令与指令代码 标号:操作码目的操作数,源源操作数;注释 标号与操作码之间“:”隔开; 操作码与操作数之间用“空格”隔开; 目的操作数和源源操作数之间有“,”分隔; 操作数与注释之间用“;”隔开。 标号是由用户定义的符号组成,必须用英文大写字母开始。标号可有可无,若一条指令中有标号,标号代表该指令所存放的第一个字节存储单元的地址,故标号又称为符号地址,在汇编时,把该地址赋值给标号。 操作码是指令的功能部分,不能缺省。MCS—51指令系统中共有42种助记符,代表了33种不同的功能。例如MOV是数据传送的助记符。