恒温箱自动控制系统设计
【摘要】
本组设计的恒温箱自动控制系统主要由中央处理器、温度传感器、半导体制冷器、键盘、显示、声光报警等部分组成。处理器采用AVR Mega128单片机,温度传感器采用DS18B20,利用半导体制冷片一面制冷一面发热的工作特性进行升降温,用LCD12864作为显示输出。温度传感器检测到温度数据传送给单片机,单片机再将温度数据与给定值进行比较,从而发出对半导体制冷器的控制信号,使温度维系在给定值附近(偏差小于±2℃),同时单片机将数据送与显示器。【关键字】
单片机温度传感器半导体制冷器控制
一、设计方案比较
1.1总体设计方案
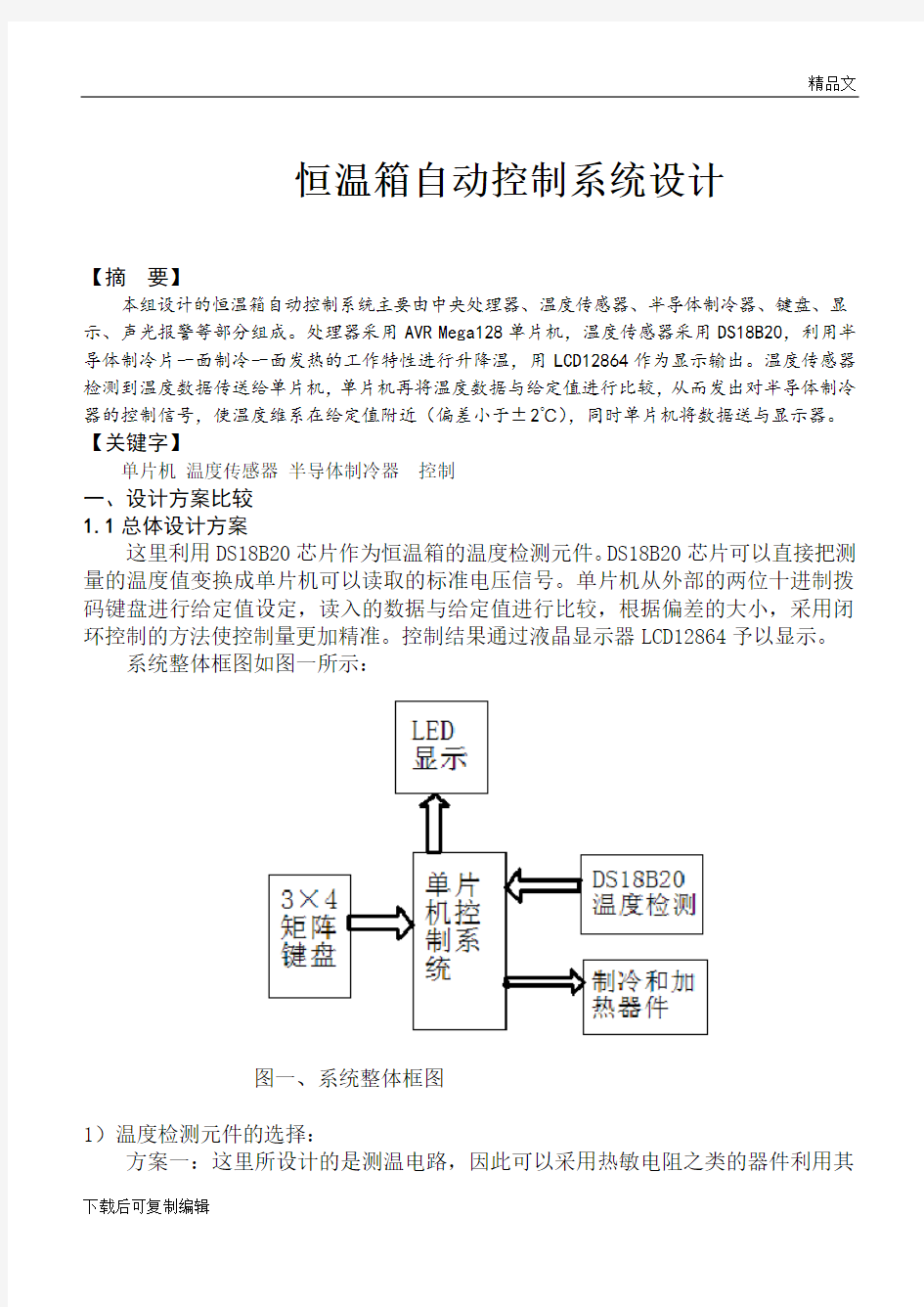
这里利用DS18B20芯片作为恒温箱的温度检测元件。DS18B20芯片可以直接把测量的温度值变换成单片机可以读取的标准电压信号。单片机从外部的两位十进制拨码键盘进行给定值设定,读入的数据与给定值进行比较,根据偏差的大小,采用闭环控制的方法使控制量更加精准。控制结果通过液晶显示器LCD12864予以显示。
系统整体框图如图一所示:
图一、系统整体框图
1)温度检测元件的选择:
方案一:这里所设计的是测温电路,因此可以采用热敏电阻之类的器件利用其
感温效应,检测并采集出随温度变化而产生的电压或电流,进行A/D转换后送给单片机进行数据处理,从而发出控制信号。此方案需要另外设计A/D转换电路,使得温测电路比较麻烦。
方案二:上网查得温度传感器DS18B20能直接读出被测温度,并可根据实际要求通过简单的编程实现9~12位的数字值读取方式,它内部有一个结构为8字节的高速暂存RAM存储器。DS18B20芯片可以直接把测量的温度值变换成单片机可以读取的标准电压信号。与方案一比较更加简单实用,因此我们选择方案二。
2)显示方案选择:
方案一:温度的显示可以用数码管,但数码管只能显示简单的数字,它有电路复杂,占用资源较多,显示信息少等缺点。
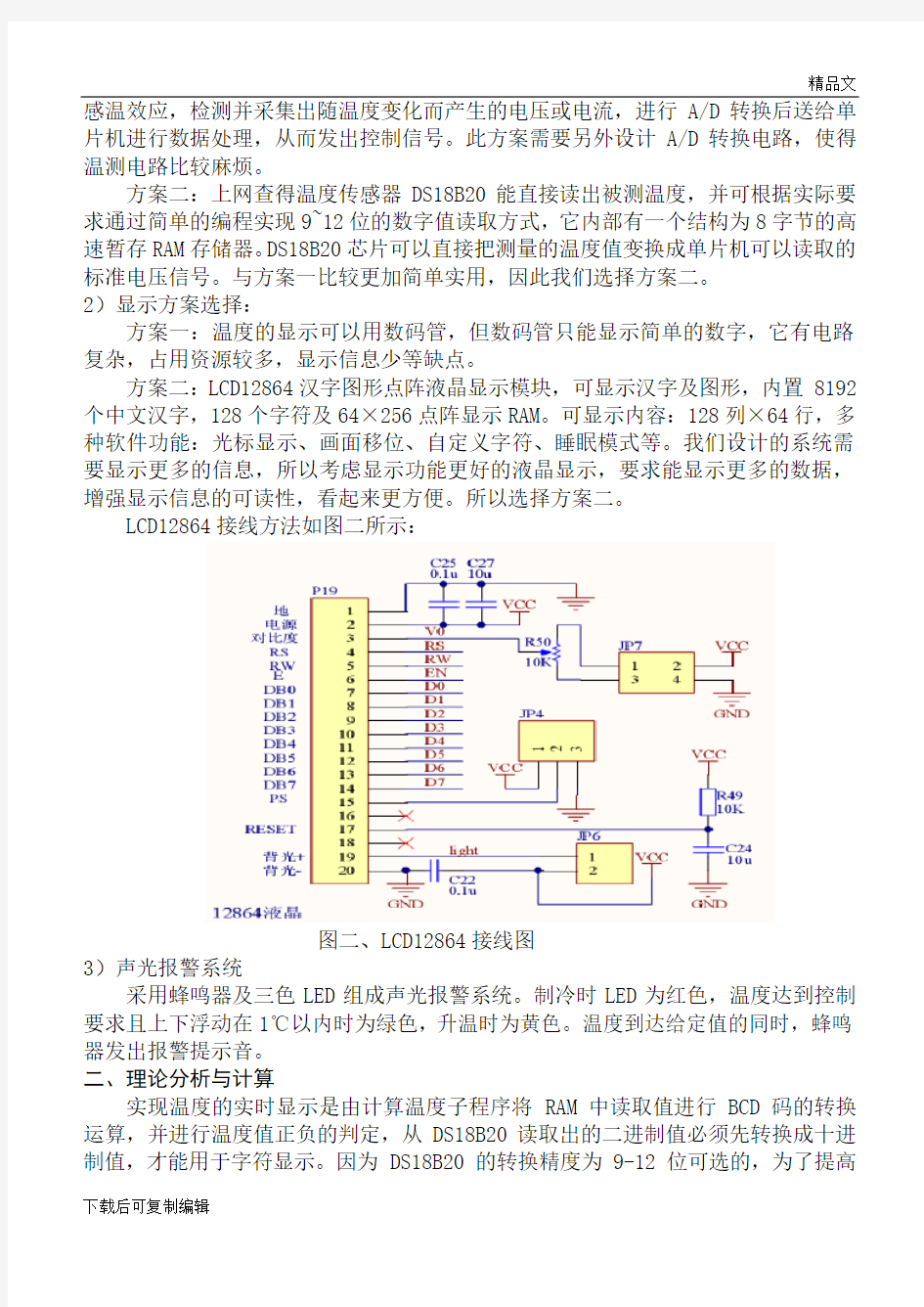
方案二:LCD12864汉字图形点阵液晶显示模块,可显示汉字及图形,内置 8192个中文汉字,128个字符及64×256点阵显示RAM。可显示内容:128列×64行,多种软件功能:光标显示、画面移位、自定义字符、睡眠模式等。我们设计的系统需要显示更多的信息,所以考虑显示功能更好的液晶显示,要求能显示更多的数据,增强显示信息的可读性,看起来更方便。所以选择方案二。
LCD12864接线方法如图二所示:
图二、LCD12864接线图
3)声光报警系统
采用蜂鸣器及三色LED组成声光报警系统。制冷时LED为红色,温度达到控制要求且上下浮动在1℃以内时为绿色,升温时为黄色。温度到达给定值的同时,蜂鸣器发出报警提示音。
二、理论分析与计算
实现温度的实时显示是由计算温度子程序将 RAM 中读取值进行 BCD 码的转换运算,并进行温度值正负的判定,从DS18B20读取出的二进制值必须先转换成十进制值,才能用于字符显示。因为 DS18B20 的转换精度为 9-12 位可选的,为了提高
精度采用12位。在采用12位转换精度时,温度寄存器里的值是以0.0625为步进的,即温度值为温度寄存器里的二进制值乘以 0.0625,就是实际的十进制温度值。
计算温度子程序流程图如图三:
图三、温度子程序流程
三、系统硬件电路设计
首先确定系统总体结构,再逐个设计所需电路。
10×10(mm)恒温室,为是室内温度与外界隔绝好,我们采用厚泡沫板做箱体,温度传感器嵌入箱内并固定在箱内中间位置;
单片机主控电路模块;
单片机最小系统接线如图四:
图四、单片机最小系统接线图
电源电路模块,设计有5V,6V,9V,12V等不同输出电压以满足各部分电压需求;
控制制冷片工作的继电器模块;
键盘输入模块,可输入二位十进制数,输入范围为5~35,超出范围时会给出错误提示;
输出显示模块;
声光报警系统,
蜂鸣器接线图如图五:
图五、蜂鸣器接线图
程序下载电路如图六示:
图六、下载电路
四、系统软件程序设计
4.1主程序
系统主程序首先对系统进行初始化,包括设置定时器、端口;开机画面显示系统程序不断循环执行显示效果:
#include
#include
#include"12864.h"
#include"delay.h"
#include"18B20.h"
#include"AVR_128.h"
#include"key_scan.h"
#define WATERON PORTE|=0x01;
#define WATEROFF PORTE&=~0x01;
#define WIND_FREEZEON PORTE|=0x02;
#define WIND_FREEZEOFF PORTE&=~0x02;
#define HEETON PORTE|=0x04;
#define HEETOFF PORTE&=~0x04;
void main()
{
uint wendu;
uchar aa,bb,a1=0,a2=0,b1=0,b2=0,b3=0,m1=0,n1=0,a,b,c;
DDRA=0xf0;
PORTA=0xff;
DDRG=0xff;
PORTG=0xff;
DDRE=0xff;
PORTE=0xf0;
PORT_Init(); //端口初始化
Lcd_Init(); //初始化LCD
Clear_All();
TCCR1B=0X05; //1024分频
TCNT1H=0Xc2; //设定初值,定时一分钟
TCNT1L=0Xf6;
TIMSK|=BIT(2);
Write_LCD(0,1,"当前温度:");
Write_LCD_lib(4,1,a); //显示转换的结果在12864上表示出来 Write_LCD_lib(5,1,b);
Write_LCD(6,1,".");
Write_LCD_lib(7,1,c);
WATERON;
}
}
}
五、测试方法与实验数据
5.1硬件和软件的调试
1、硬件调试时,可先检查印制板及焊接的质量是否符合要求,有无虚焊点及线路间有无短路、断路。然后用万用表检测,检查无误后,可通电检查 LCD 液晶显示器亮度情况,一般情况下取背光电压为 4~5.5V 即可得到满意的效果,再依次检查各部分结构安装是否牢固。
2.软件调试是在ICCAVR编译器下进行,源程序编译及仿真调试应分段或以子程序为单位逐个进行,最后结合硬件实时调试。
子程序调试包括:
1).LCD12864显示程序;
2).延时函数子程序;
3).DS18B20读出温度子程序、温度转换命令子程序、计算温度子程序、显示数据刷新子程序。
5.2实验数据及结果分析
1、实验数据
2、结果分析
升、降温过程中每变化15℃所用时间均未超过3分钟,满足设计要求,但是从数据可以看出,温度在向室温方向变化时的速度要快于背离室温变化时的速度,说明外界温度对恒温箱内温度还是有一定的影响,不可消除。
六、报告总结
本恒温箱的温度可调范围:3~35℃,温度误差小,温度显示稳定。可显示当前温度、设定温度、温度差值;设定温度通过3×4矩阵键盘输入,当温度达到设定值时启动蜂鸣器,指示灯变为绿色。
【参考文献】
1. 单片机原理与控制技术 (第二版) 张志良主编
2. 单片机机开发技术与实训黄庆华、张永格、主编
3. 高频电路原理与分析 (第二版) 曾兴雯、刘乃安、陈键、编著
4. 电子线路设计·实验·测试(第二版)谢自美、主编
5 全国大学生电子设计竞赛获奖作品汇编 (06/07/08年)
6 电子线路设计应用手册张友汉主编
7 单片机基础. 李广弟主编
唐山学院 测控系统原理课程设计 题目恒温箱控制器的设计 系 (部) 机电工程系 班级 姓名 学号 指导教师 2014 年 03 月 02 日至 03 月 13 日共两周 2014年 03 月 13 日
测控系统原理课程设计任务书 一、设计题目、内容及要求 1、设计题目:恒温箱控制器的设计 2、设计内容:运用所学单片机、模拟和数字电路、以及测控系统原理与设计等方面的知识,设计出一台以AT89C52为核心的恒温箱控制器,对恒温箱的温度进行控制。完成恒温箱温度的检测、控制信号的输出、显示及键盘接口电路等部分的软、硬件设计,A/D和D/A 转换器件可自行确定,利用按键(自行定义)进行温度的设定,同时将当前温度的测量值显示在LED上。 恒温箱控制器要求如下: 1)目标稳定温度范围为100摄氏度——50摄氏度; 2)以PID控制算法实现控制精度为±1度; 3)温度传感器输入量程:30摄氏度——120摄氏度,电流4——20mA; 4)加热器为交流220V,1000W电炉。 3、设计要求: 1)硬件部分包括微处理器(MCU)、D/A转换、输出通道单元、键盘、显示等; 2)软件部分包括键盘扫描、D / A转换、输出控制、显示等; 3)用PROTEUS软件仿真实现; 4)用Protel画出系统的硬件电路图; 5)撰写设计说明书一份(不少于2000字),阐述系统的工作原理和软、硬件设计方法,重点阐述系统组成框图、硬件原理设计和软件程序流程图。说明书应包括封面、任务书、目录、摘要、正文、参考文献(资料)等内容,以及硬件电路图和软件程序框图等材料。 二、设计原始资料 Proteus 及KEIL51仿真软件,及软件使用说明。 三、要求的设计成果(课程设计说明书、设计实物、图纸等) 设计说明书一份(不少于2000字)。
摘要 温度与生物的生活环境密切相关,不同的生物或物体对温度的要求都不同。随着智能控制技术不断的发展,在现代工业生产以及科学实验的许多场合,为了获取生物或物体所需求的温度,需要及时准确的获取温度信息,同时完成对温度的预期控制,这时候温度检测与控制系统就显得尤其的重要。因此,温度检测系统的设计与研究一直备受广大科研者重视。 本次课题设计了一个低成本,高精度的恒温箱。该设计主要从硬件和软件两个方面出发: 1)在硬件上,选择AT89C52单片机为核心,采用了TL431组成2.5V的恒流源,并以Pt100温度传感器作为温度检测仪器,通过ICL7135模数转换器采集数据,用LED数码管作为显示器,构成了一个恒温箱; 2)在软件上,设计了温度检测算法,并在C语言编程环境下,编写了相应的程序来实现所设计的算法。最后通过Proteus ISIS与Keil的联合仿真,保证了算法的可行性。 通过仿真实验可以发现所设计的系统可以较好的检测、控制并且保持温度。但是由于温度调节的迟滞性以及设计上的不足,该系统具有一定的局限性。 关键词:温度检测;AT89C52单片机;恒温箱;C语言编程
ABSTRACT Temperature is closely related to life and environment. Different creature or object have different requirements to temperature. With the development of the intelligent-control- technology, and in order to arrive to the creature's or object's temperature-demand, we should take the information of temperature timely and accuratly, and control the temperature to the expected degree, in the modern industrial production and scientific experiment many occasions . I n this situation, the testing and controlling system for temperature is especially important. Therefore, the designs for temperature detection system attract researchers' attentions. In this dissertation, we designed a box with constant temperature which has low cost as well as high accuracy. We designed the system mainly from two aspects: hardware and software 1)Hardware's design: At first, we chosed AT89C52 SCM as the core of the system. And then we selected TL431 to compose the 2.5 V constant and Pt100 temperature sensor for testing temperature. At last, we collecte data througn the ICL7135 ADC and display data them on the LED. All of this consists of a the constant-temperature-box; 2)Software's design: In this papar, we designed a algorithm detecte temperature and implemented it based on the C programming language's environment. Finally we did a series of simulation experiment through the Proteus ISIS and Keil to ensure that the algorithm is feasible. Simulation results show that the system designed had a very good effect on temperature's detection, controlling and keeping . Because of the adjustmentand of the temperature and the insufficiency of the design, this system has some limitations. Keywords:Temperature detection;AT89C52 SCM; Box of constant temperature ; C language programming
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:自动控制理论课程设计 设计题目:直线一级倒立摆控制器设计 院系:电气学院电气工程系 班级: 设计者: 学号: 指导教师: 设计时间:2016.6.6-2016.6.19 手机: 工业大学教务处
*注:此任务书由课程设计指导教师填写。
直线一级倒立摆控制器设计 摘要:采用牛顿—欧拉方法建立了直线一级倒立摆系统的数学模型。采用MATLAB 分析了系统开环时倒立摆的不稳定性,运用根轨迹法设计了控制器,增加了系统的零极点以保证系统稳定。采用固高科技所提供的控制器程序在MATLAB中进行仿真分析,将电脑与倒立摆连接进行实时控制。在MATLAB中分析了系统的动态响应与稳态指标,检验了自动控制理论的正确性和实用性。 0.引言 摆是进行控制理论研究的典型实验平台,可以分为倒立摆和顺摆。许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等,都可以通过倒立摆系统实验直观的表现出来,通过倒立摆系统实验来验证我们所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。由于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。 本次课程设计中以一阶倒立摆为被控对象,了解了用古典控制理论设计控制器(如PID控制器)的设计方法和用现代控制理论设计控制器(极点配置)的设计方法,掌握MATLAB仿真软件的使用方法及控制系统的调试方法。 1.系统建模 一级倒立摆系统结构示意图和系统框图如下。其基本的工作过程是光电码盘1采集伺服小车的速度、位移信号并反馈给伺服和运动控制卡,光电码盘2采集摆杆的角度、角速度信号并反馈给运动控制卡,计算机从运动控制卡中读取实时数据,确定控制决策(小车运动方向、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,通过皮带带动小车运动从而保持摆杆平衡。 图1 一级倒立摆结构示意图
湖南理工学院南湖学院 课程设计 题目:电加热炉温度控制系统设计专业:机械电子工程 组名:第三组 班级:机电班 组成员:彭江林、谢超、薛文熙
目录 1 意义与要求 (2) 1.1 实际意义 (2) 1.2 技术要求 (2) 2 设计内容及步骤 (2) 2.1 方案设计 (2) 2.2 详细设计 (3) 2.2.1 主要硬件介绍 (3) 2.2.2 电路设计方法 (4) 2.2.3 绘制流程图 (7) 2.2.4 程序设计 (8) 2.3 调试和仿真 (8) 3 结果分析 (9) 4 课程设计心得体会 (10) 参考文献 (10) 附录............................................................ 10-27
1 意义与要求 1.1 实际意义 在现实生活当中,很多场合需要对温度进行智能控制,日常生活中最常见的要算空调和冰箱了,他们都能根据环境实时情况,结合人为的设定,对温度进行智能控制。工业生产中的电加热炉温度监控系统和培养基的温度监控系统都是计算机控制系统的典型应用。通过这次课程设计,我们将自己动手设计一个小型的计算机控制系统,目的在于将理论结合实践以加深我们对课本知识的理解。 1.2 技术要求 要求利用所学过的知识设计一个温度控制系统,并用软件仿真。功能要求如下: (1)能够利用温度传感器检测环境中的实时温度; (2)能对所要求的温度进行设定; (3)将传感器检测到得实时温度与设定值相比较,当环境中的温度高于或低于所设定的温度时,系统会自动做出相应的动作来改变这一状况,使系统温度始终保持在设定的温度值。 2 设计内容及步骤 2.1 方案设计 要想达到技术要求的内容,少不了以下几种器件:单片机、温度传感器、LCD显示屏、直流电动机等。其中单片机用作主控制器,控制其他器件的工作和处理数据;温度传感器用来检测环境中的实时温度,并将检测值送到单片机中进行数值对比;LCD显示屏用来显示温度、时间的数字值;直流电动机用来表示电加热炉的工作情况,转动表示电加热炉通电加热,停止转动表示电加热炉断
——您身边的实验室工程专家 恒温恒湿系统控制 南京拓展科技有限公司是专业从事恒温恒湿、生物安全、理化检测等实验室整体规划设计、安装和运行保障为一体的高科技服务型企业,是实验室综合解决方案的提供者。 建设要求: 1、恒温恒湿室技术要求 a) 符合ISO、GB标准。 b) 根据甲方要求恒温恒湿实验室设置精度 c) 风速0.25m/s。 2、建筑要求 a) 建筑物周围无强磁场、震动、热源、异味、污染等。 b) 建筑物层高应在3.0m以上(梁下净空高度)。 3、恒温室建设要求 a) 送风方式为孔板式,上送风,下回风。 b) 室内净空高度为2.35-2.70m。 c) 无窗,减少门的数量。 d) 新建实验室的恒温室内不设上下水、供暖管线设施。改建实验室的恒温室内上下水、供暖管线设施应按规范作隔热防潮处理。 4、空调机房建设要求 a) 应建在有外墙的位置。 b) 独立供电系统和接地系统。 c) 设有上下水,下水作防异味处理。 5、保温墙面要求 λ=0.021~0.12Kcal/m·H·℃(λ=0.0244~0.1395w/m·k)范围内,吸水率不大于10%,热绝缘性能优,耐水性能好,难燃,绿色环保、尺寸稳定性能好的材料. 6、保温材料导热系数λ=0.0267~0.0289w/m·k,满足要求。
——您身边的实验室工程专家恒温恒湿空调系统的任务,是将室内的温湿度及洁净度控制在一定的波动范围内,以满足工业生产、科学研究等特殊场合对室内环境的要求。近年来,随着我国生产力的发展和科技水平的不断提高,恒温恒湿空调系统的应用场合越来越多,温湿度要求也不断提高。在电子、医药、计量、纺织、光学仪器和农业育种等领域,恒温恒湿空调系统的精度和可靠性直接关系着产品的品质以及实验结果的准确性。在系统的冷热源配置、空气热湿处理、气流组织和系统控制等方面均与舒适性空调系统存在较大差异。结合近年来典型工程实践,讨论恒温恒湿系统设计中需要注意的若干问题。 1. 室内环境参数的确定 恒温恒湿间室内环境参数的确定取决于产品、实验对像或实验设备的要求。不同的精度和可靠性等要求,往往使恒温恒湿系统的复杂性大不相同,也极大地关系到系统的初投资和运行费用。肓目地提高精度要求,往往会导致初投资和运行费用成倍增加;相反,如果精度要求过低,将可能直接导致生产、实验活动的失败。因此,在系统设计之前,需要暖通专业人员与使用方根据生产和实验对像的要求,准确地提出室内环境的要求。 主要包括: 1)控制区域。在某些生产、实验过程中,需要对整个房间的温湿度进行控制。但更多的情况是只须对特定的生产、实验区域进行严格控制。 2)基准温湿度。很多生产、实验要求基准温湿度为固定不变的值,例如很多计量实验要求的基准温度为22 ℃,一些纺织类的生产、实验要求基准相对湿度为65%。还有一些特殊的实验过程和气候室,要求室内的基准温湿度可以根据实验要求在较大范围内进行调整,此时需要确认其变化范围和变化时间。 3)温湿度精度。温湿度精度一般包括2方面的要求,即单一控制点的时间变化率和均匀度。在参数确认阶段,必须明确精度要求的涵义。均匀度要求一般针对温度精度,可以用垂直方向和水平方向的温度梯度要求的方式提出。 4)新风要求。新风要求一般根据室内工作人员数量提出。新风对室内环境扰动极大,因此新风量的确定应该尽可能合理、准确。由于一般恒温恒湿环境所需要的换气次数较多,因此不能采用最小新风比的方法确定。 5)可靠性要求。某些实验周期较长或重要的场合,对恒温恒湿环境的可靠性有明确要求,如要求系统可连续不间断运行若干时间。此时需要在设备的备用方面加以考虑。
基于单片机的模糊温度控制器的设计 1 引言 本文研究的被控对象为某生产过程中用到的恒温箱,按工艺要求需保持箱温100℃恒定不变。我们知道温度控制对象大多具有非线性、时变性、大滞后等特性, 采用常规的PID 控制很难做到参数间的优化组合, 以至使控制响应不能得到良好的动态效果。而模糊控制通过把专家的经验或手动操作人员长期积累的经验总结成的若干条规则,采用简便、快捷、灵活的手段来完成那些用经典和现代控制理论难以完成的自动化和智能化的目标, 但它也有一些需要进一步改进和提高的地方。模糊控制器本身消除系统稳态误差的性能比较差, 难以达到较高的控制精度, 尤其是在离散有限论域设计时更为明显, 并且对于那些时变的、非线性的复杂系统采用模糊控制时, 为了获得良好的控制效果, 必须要求模糊控制器具有较完善的控制规则。这些控制规则是人们对受控过程认识的模糊信息的归纳和操作经验的总结。然而, 由于被控过程的非线性、高阶次、时变性以及随机干扰等因素的影响, 造成模糊控制规则或者粗糙或者不够完善, 都会不同程度的影响控制效果。为了弥补其不足, 本文提出用自适应模糊控制技术,达到模糊控制规则在控制过程中自动调整和完善, 从而使系统的性能不断完善, 以达到预期的效果。 2 自调整模糊控制器的结构及仿真 (1) 控制对象 一般温度可近似用一阶惯性纯滞后环节来表示, 其传递函数为: 式中: K———对象的静态增益; Tc———对象的时间常数; τ———对象的纯滞后时间常数。 本文针对某干燥箱的温度控制, 用Cohn-Coon 公式计算各参数得: K=0.181; Tc=60; τ=20。 ( 2) 自调整模糊控制器的结构 自调整模糊控制器的结构如图1 所示。
成绩: 自动控制原理 课程设计报告 学生姓名:黄国盛 班级:工化144 学号:201421714406 指导老师:刘芹 设计时间:2016.11.28-2016.12.2
目录 1.设计任务与要求 (1) 2.设计方法及步骤 (1) 2.1系统的开环增益 (1) 2.2校正前的系统 (1) 2.2.1校正前系统的Bode图和阶跃响应曲线 (1) 2.2.2MATLAB程序 (2) 3.3校正方案选择和设计 (3) 3.3.1校正方案选择及结构图 (3) 3.3.2校正装置参数计算 (3) 3.3.3MATLAB程序 (4) 3.4校正后的系统 (4) 3.4.1校正后系统的Bode图和阶跃响应曲线 (4) 3.4.2MATLAB程序 (6) 3.5系统模拟电路图 (6) 3.5.1未校正系统模拟电路图 (6) 3.5.2校正后系统模拟电路图 (7) 3.5.3校正前、后系统阶跃响应曲线 (8) 4.课程设计小结和心得 (9) 5.参考文献 (10)
1.设计任务与要求 题目2:已知单位负反馈系统被控制对象的开环传递函数 ()() 00.51K G s s s =+用串联校正的频率域方法对系统进行串联校正设计。 任务:用串联校正的频率域方法对系统进行串联校正设计,使系统满足如下动态及静态性能 指标: (1)在单位斜坡信号作用下,系统的稳态误差0.05ss e rad <; (2)系统校正后,相位裕量45γ> 。 (3)截止频率6/c rad s ω>。 2.设计方法及步骤 2.1系统的开环增益 由稳态误差要求得:20≥K ,取20=K ;得s G 1s 5.0201)s(0.5s 20)s (20+=+=2.2校正前的系统 2.2.1校正前系统的Bode 图和阶跃响应曲线 图2.2.1-1校正前系统的Bode 图
生化处理的恒温恒湿控制系统设计 2007年第11期(总第108期) 宋奇光,伍宗富,梅彬运(湖南文理学院,湖南常德415000 ) 【摘要】以PLC为控制器,结合温度传感变送器、LED显示器等,组成 一个生化处理的恒温恒湿控制系统。使用温度传感变送器获得温度的感应电压, 经处理后送给PLC。PLC将给定的温度与测量温度的相比较,得出偏差量,然后 根据模糊控制算法得出控制量。执行器由开关频率较高的固态继电器开关担任, 采用PWM控制方法,改变同一个周期中电子开关的闭合时间。从而调节高温电 磁阀开关的导通时间,达到蒸汽控制目的。 【关键词】生化处理;PLC;恒温恒湿 引言 生化处理系统是食品工艺的关键设备。在此以米粉生产工艺中的生化处理系统的蒸汽温湿度控制进行实用设计,其温度控制在0~100℃,误差为±0.5℃,可用键盘输入设置温度及LED实时显示系统温度,采用模糊算法进行恒温控制,将数字处理控制方法运用到温度控制系统中,可以克服温度控制系统中存在的严重的滞后现象,可以很大程度的提高控制效果和控制精度[1]。 1米粉生化处理的恒温恒湿系统现状与分析 1.1 现状 由于国内米粉生产设备厂家尚未掌握米粉的关键技术,使其制造的设备无法满足米粉生产的工艺要求。我们经过现场堪察,发现原有的连续式米粉生化处理恒温恒湿控制系统具有如下现状。 一是连续式米粉生化处理恒温恒湿箱的控制基本上是手动调节; 二是箱内各部位温度分布不均匀,实际温度波动太大(40-70℃),远远达不到生产要求(62.5℃±2.5℃),影响米粉的抗老化效果; 三是实际湿度也达不到生产要求,容易出现湿度偏高(米粉发泡)或者偏低(米粉起壳)的现象,严重影响米粉生产质量; 四是上层辅助加热管道分布不合理,容易使散落米粉焦化,影响产品质量。
编号: 毕业设计任务书 题目:恒温箱温度控制系统的设计 学院:机电工程学院 专业:电气工程及其自动化 学生姓名:孙卉 学号:1200120304 指导教师单位:机电工程学院 姓名:韦寿祺 职称:教授 题目类型:?理论研究?实验研究?工程设计?工程技术研究?软件开发 2015年12月28日
一、毕业设计(论文)的内容 恒温箱广泛应用在医疗、工业生产和食品加工等领域,其对温度稳定性要求较高,如何实现对温度的精确控制是恒温箱温度控制系统的关键。温度控制系统通常由被控对象、测量装置、调节器和执行机构等组成。目前,测量装置大多采用温度传感器采集温度,但是在常规的环境中,温度受其它因素影响较大,而且难以校准,因此,温度也是较难准确测量的一个参数,常规方法测量温度误差大、测量滞后时间长。当前,普遍使用单片机或者PLC实现恒温箱温度的智能控制,两种控制方式各有优势。本课题要求设计一种智能恒温控制系统,选择合适的控制方式实现温度的智能控制,具体任务如下: 1、收集有关恒温箱的文献资料,了解恒温箱的工作原理、工艺要求等,重点学习掌握恒温箱温度控制系统的构成、运行参数、控制特点等,选择合适的控制方式,制定恒温箱电热温度控制系统的控制方案。 2、建立恒温箱电热温度控制系统的数学模型,应用仿真软件进行仿真,选择调节器参数,分析系统稳态和动态控制性能指标。 3、完成恒温箱电热温度控制系统的硬件电路设计和相关控制软件程序的编写,绘制系统原理图,计算元器件参数,选择元器件型号。 4、制作演示模拟样机,进行软硬件联调。 二、毕业设计(论文)的要求与数据 1、收集恒温箱温度控制系统的工作原理和控制方法的相关文献资料15篇以上,其中英文文献不少于2篇。 2、恒温箱电热温度控制系统的输入电源为单相220V,电加热额定功率5kW,温度调节范围室温~200℃,温度控制精度在±1℃以内。 3、恒温箱对加热电源电流的传递函数为18.4 e ,采用PID调节器或九点 1.2s 控制器设计恒温箱电热温度控制系统,选择单片机或PLC作为控制器。 4、演示模拟样机采用单相220V供电,自行定义加热功率,最高温度100℃,温度控制精度在±1℃以内。 三、毕业设计(论文)应完成的工作 1、完成二万字左右的毕业设计说明书,要求原理正确,数据详实,文理通顺,格式规范;毕业设计说明书的英文摘要要求300个单词以上,内容与中文摘要一致,语句通顺,无语法错误;附15篇以上参考文献,其中英文文献不少于
课程设计题目:单片机恒温箱温度控制系统的设计 本课程设计要求:本温度控制系统为以单片机为核心,实现了对温度实时监测和控制,实现了控制的智能化。设计恒温箱温度控制系统,配有温度传感器,采用DS18B20数字温度传感器,无需数模拟∕数字转换,可直接与单片机进行数字传输,采用了PID控制技术,可以使温度保持在要求的一个恒定围,配有键盘,用于输入设定温度;配有数码管LED用来显示温度。 技术参数和设计任务: 1、利用单片机AT89C2051实现对温度的控制,实现保持恒温箱在最高温度为110℃。 2、可预置恒温箱温度,烘干过程恒温控制,温度控制误差小于±2℃。 3、预置时显示设定温度,恒温时显示实时温度,采用PID控制算法显示精确到0.1℃。 4、温度超出预置温度±5℃时发出声音报警。 5、对升、降温过程没有线性要求。 6、温度检测部分采用DS18B20数字温度传感器,无需数模拟∕数字转换,可直接与单片机进行数字传输 7、人机对话部分由键盘、显示和报警三部分组成,实现对温度的显示、报警。
一、本课程设计系统概述 1、系统原理 选用AT89C2051单片机为中央处理器,通过温度传感器DS18B20对恒温箱进行温度采集,将采集到的信号传送给单片机,在由单片机对数据进行处理控制显示器,并比较采集温度与设定温度是否一致,然后驱动恒温箱的加热或制冷。2、系统总结构图 总体设计应该是全面考虑系统的总体目标,进行硬件初步选型,然后确定一个系统的草案,同时考虑软硬件实现的可行性。总体方案经过反复推敲,确定了以美国Atmel公司推出的51系列单片机为温度智能控制系统的核心,并选择低功耗和低成本的存储器、数码显示器等元件,总体方案如下图: 图1系统总体框图 二、硬件各单元设计 1、单片机最小系统电路 单片机选用Atmel公司的单片机芯片AT89C2051 ,完全可以满足本系统中要求的采集、控制和数据处理的需要。单片机的选择在整个系统设计中至关重要,该单片机与MCS-51系列单片机高度兼容、低功耗、可以在接近零频率下工作等诸多优点,而广泛应用于各类计算机系统、工业控制、消费类产品中。 AT89C2051是AT89系列单片机中的一种精简产品。它是将AT89C51的P0口、P2口、EA/Vpp、ALE/PROG、PSEN口线省去后,形成的一种仅20引脚的单片机,相当于早期Intel8031的最小应用系统。这对于一些不太复杂的控制场合,仅有一片AT89C2051就足够了,是真正意义上的“单片机”。AT89C2051为很多规模不太大的嵌入式控制系统提供了一种极佳的选择方案,使传统的51系列单片机
北方民族大学学士学位论文论文题目:温度自动控制系统的设计 北方民族大学教务处制
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
过程控制系统课程设计报告书管式加热炉温度控制系统设计 学院:自动化 班级:15级自动化4班 指导老师:陈刚 组员: 重庆大学自动化学院 2019年1月
任务分配 过程控制系统课程设计——管式加热炉温度控制系统的设计
目录 任务分配 (2) 过程控制系统课程设计——管式加热炉温度控制系统的设计 (2) 1摘要 (4) 2模型简介 (4) 2.1背景 (4) 2.2模型假设 (4) 2.3系统扰动因素 (5) 3控制方案 (5) 3.1传统PID控制方法 (5) 3.2串级控制系统 (6) 3.3 方案选择 (7) 4串级控制器的设计 (7) 4.1主副控制器设计 (7) 4.1.1主、副回路的设计原则 (7) 4.1.2主、副调节器的选型 (7) 4.1.3主、副调节器调节规律的选择作用 (8) 4.2串级控制器的参数整定 (8) 5系统的仿真和改进 (9) 5.1串级控制系统仿真 (9) 5.2基于Smith预估计补偿器的串级控制系统 (11) 六.总结 (14) 七.参考文献 (15)
1摘要 当今世界,随着市场竞争的日益激烈,产品的质量和功能也向更高的档次发展,制造产品的工艺过程变得越来越复杂,为满足优质、高产、低消耗,作为工业自动化重要分支的过程控制的任务也愈来愈重,无论是在大规模的工业生产过程中,还是在传统工业过程改造中,过程控制技术对于提高产品质量以及节省能源等均起十分重要的作用。为了能将课程所学理论知识初步尝试应用于实践。 本设计针对管式加热炉系统的控制问题展开了研究。通过将实际加热炉模型化,通过实验法建立锅炉的数学模型。针对物料温度控制问题,在对比了简单的单回路PID控制方法、串级控制两种方法的优劣性后,选择了串级控制的方法控制物料温度。综合应用过程控制理论以及MATLAB仿真技术,通过经验模型及参数整定,得到系统响应曲线。通过反复实验,调整参数,使控制效果比较理想。 关键词:管式加热炉系统、串级控制、MATLAB仿真 2模型简介 2.1背景 管式加热炉是石油工业中重要装置之一,加热炉控制的主要任务就是保证工艺介质最终温度达到并维持在工艺要求范围内,由于其具有强耦合、大滞后等特性,控制起来非常复杂。同时,近年来能源的节约、回收和合理利用日益受到关注。加热炉是冶金、炼油等生产部门的典型热工设备,能耗很大。因此,在设计加热炉控制系统时,在满足工艺要求的前提下,节能也是一个重要质量指标,要保证加热炉的热效率最高,经济效益最大。另外,为了更好地保护环境,在设计加热炉控制系统时,还要保证燃料充分燃烧,使燃烧产生的有害气体最少,达到减排的目的。 2.2模型假设 管式加热炉的主要任务是把原质油或重油加热到一定的温度,保证下一道工序正常进行。假设有一个加热炉系统,系统参数设定为: 1.物料以恒定速度进入管道,流速为10L/s,管道直径为10cm,不考虑物料浓度变化、压力变化等其他条件。 2.物料在加热炉内的长度为L=5m,假定物料受热均匀,并在t=10s后上升至指定温度。 3.假定燃气混合浓度不变,物料温度上升只受燃料流量影响。 4.不考虑环境温度、燃料值等影响,主要考虑燃料流量的扰动。
组合式空调恒温恒湿的自动控制 【关健词】组合式空调恒温恒湿除湿 【摘要】如何符合特殊的生产线温湿度的使用要求,是空调系统及其控制系统设计的难题。组合式空调的自控系统较好地解决了这难题,它采用了除湿优先的控制方法,利用最小能量能使该系统达到恒温恒湿控制精度。 我国为了更加快速与国际形势市场接轨,在原加入WTO的基础上,历经金融风暴后,大多数医疗手术室、电子、烟草、化工、制药、食品、民用建筑、商场、工业厂房及印刷等洁净空间,都感觉到无形的压力。这样强迫他们不断地更新设备、更新工业、更新观念,不断提高产品档次,提高产品质量。特别是国内的喷涂生产线,他们从国外引入先进的机器人喷涂生产线替代即将淘汰残旧的设备。这种机器人喷涂生产线对环境要求很高,温湿度不稳均会影响产品的外观及喷涂率,甚至导致涂料成本增加、喷涂不匀等质量问题。面对这烦恼的问题,恰好遇到了组合式空调,它完全可以满足工艺要求。按国家相关标准要求,室内温度要求±1℃,相对湿度要求±5%。如何符合特殊的生产线温湿度的使用要求,成为了空调系统及其控制系统设计的难题。组合式空调的自控系统较好地解决了这难题,它典型结构如图1所示。 图1 组合式空调结构示意图 根据喷涂生产线对空气的质量精度要求不同、南北方气候差异,选配较合理功能段的组合式空调对空气进行混合、加热、冷却、加湿、除湿、过滤等处理也相当重要,满足车间温湿
度时积极提倡节能回收。除湿是恒温恒湿系统空气处理过程中必不可少的环节,在空调系统中常采用冷冻除湿技术。因为制冷系统既要控制温度又要控制湿度,而被控制室内的温湿度也是密切关联,所以较难符合被控制生产线所要求达到理想的温湿度精度。空气成分的温湿度是密切关联,如:温度精度≤±1℃与湿度精度≤±1%相比,湿度较难控制。因此±1%湿度所对应的温度精度≤±1℃。假设在12℃结露点上空气的含水率保持恒定,但空气温度在1.0℃之间变化,那么相对湿度就在47%和53%之间波动,0.2℃的空气温度变化将引起大于0.5%的相对湿度的变化。这一点可查空气H-D图(焓湿图)可以得到证明。组合式空调系统中表冷器有降温和除湿双重功能,致它接受两个控制量的控制,至于它在某一时刻接收那个信号控制,需要看哪个参数先满足要求而定。对于室内有散湿负荷,特别是湿负荷变化大的对象(生产线),无疑是十分合适的,因为它不是控制固定露点温度来确保室内相对湿度。虽然有人称它为无露点控制方式,但是这并不意味着经表冷器处理后的空气不必再处理到相应的露点温度。要除湿从原理上说,必须把空气处理到相应的露点.这样的控制方式把它称为不定露点温度控制。这样经此处理的冷气进入房间后,除非室内有大量显热负荷,在大多数情况下,都会导致室内过冷,相对湿度显得过高。实际运行过程中控制器选择的控制信号多半是来自湿度控制器的信号,于是避免冷热抵消,该系统将在消耗最低能量下运行。组合式空调是针对室外空气的经过过滤处理后用风机以一定的风量送往室内,来调节室内的空气。F6、F9袋式及G4板式的过滤器作用是除去空气中的细菌来提高空气洁净度;调节冰水比例阀控制表冷器冰水流量对空气进行制冷和除湿;调节加湿比例阀控制干蒸汽加湿器过热蒸汽流量对空气进行加湿处理;调节加热比例阀控制加热盘管过热蒸汽流量进行加热处理。自控系统采用西门子CPU226CN为控制核心的PLC,由温湿变送器采集0-10V的温湿度信号送到A/D模EM235,通过PLC的PID运算,输出D/A模块EM232由信号0-10V调节控制比例阀的运行控制温湿度;风量变送器采集0-10V的风量信号经过变换和计算,输出控制变频器的运行控制风量。所有控制状态和有关数据可以在触摸(HMI)监控显示。控制系统构成如图2所示,I/O接线示意图如图3所示,触摸屏(HMI)监控图如图4所示。
一.课程设计内容 运用所学单片机、模拟和数字电路、以及测控系统原理与设计等方面的知识,设计出一台以AT89C52为核心的恒温箱控制器,对恒温箱的温度进行控制。完成恒温箱温度的检测、控制信号的输出、显示及键盘接口电路等部分的软、硬件设计,AD和DA转换器件可自行确定,利用按键(自行定义)进行温度的设定,同时将当前温度的测量值显示在LED上。 恒温箱控制器要求如下: 1)目标稳定温度范围为100摄氏度——50摄氏度。 2)控制精度为±1度。 3)温度传感器输入量程:30摄氏度——120摄氏度,电流4—— 20mA。 加热器为交流220V,1000W电炉。 二.课程设计应完成的工作 1)硬件部分包括微处理器(MCU)、DA转换、输出通道单元、键盘、显示等; 2)软件部分包括键盘扫描、D A转换、输出控制、显示等; 3)用PROTEUS软件仿真实现; 4)画出系统的硬件电路结构图和软件程序框图; 5)撰写设计说明书一份(不少于2000字),阐述系统的工作原理和软、硬件设计方法,重点阐述系统组成框图、硬件原理设计和软件程序流程图。说明书应包括封面、任务书、目录、摘要、正文、参考文献(资料)等内容,以及硬件电路结构图和软件程序框图等材料。
注:设计说明书题目字体用小三,黑体,正文字体用五号字,宋体,小标题用四号及小四,宋体,并用A4纸打印。 三.课程设计进程安排 课程设计各阶段名称日期、周次 序 号 1 总体设计,硬件设计2012年12月24日~25日,17周 2012年12月26日~28日,17周 2 绘制软件程序流程图,编写软 件 3 软、硬件仿真调试2012年12月27日,18周 4 软、硬件仿真调试2013年1月2日~3日,18周 5 撰写设计说明书2013年1月4日,18周 四、.设计资料及参考文献 1.王福瑞等.《单片微机测控系统设计大全》.北京航空航天大学出版社,1999 2.《现代测控技术与系统》韩九强清华大学出版社 2007.9 3.《智能仪器》程德福,林君主编机械工业出版社 2005年2月4.《测控仪器设计》浦昭邦,王宝光主编机械工业出版社 2001 5.Keil C51帮助文档 五.成绩评定综合以下因素: (1) 说明书及设计图纸的质量(占60%)。 (2) 独立工作能力及设计过程的表现(占20%)。 (3) 回答问题的情况(占20%)。 说明书和图纸部分评分分值分布如下: 1、需求分析与设计思路(10分)
自动控制原理课程设计 专业: 班级: 姓名: 学号: 指导教师: 兰州交通大学自动化与电气工程学院2013 年01月11日
目录 控制系统超前校正 (2) 1.问题描述 (2) 1.1设计目的 (2) 1.2设计内容 (2) 1.3超前校正及其特性 (2) 1.4系统参数设计步骤 (4) 2.校正系统设计 (5) 2.1 控制系统的任务要求 (5) 2.2校正前系统分析 (5) 2.3 校正系统的设计与分析 (7) 2.4 校正前后系统比较 (10) 2.5 软件仿真 (11) 2.6 硬件实验模拟电路 (13) 2.7 部分分析题解答 (14)
3. 课程设计总结 (15) 参考文献 (16) 控制系统超前校正 1.问题描述 1.1设计目的 (1) 了解串联超前校正环节对系统稳定性及过渡过程的影响; (2) 掌握用频率特性法分析自动控制系统动态特性的方法; (3) 掌握串联超前校正装置的设计方法和参数调试技术; (4) 掌握设计给定系统超前校正环节的方法,并用仿真技术验证校正环节理论设计的正确性。 (5) 掌握设计给定系统超前校正环节的方法,并模拟实验验证校正环节理论设计的正确性。 1.2设计内容 已知单位反馈控制系统的开环传递函数为: ()() ()11o K G s s as bs = ++ 设计超前校正装置,使校正后系统满足: 11,,%%v c K cs ds e ωσ--=≥≤ 1.3超前校正及其特性 超前校正就是在前向通道中串联传递函数为: ()11 ()()1 c C s aTs G s R s a Ts += =?+ (1-1) 通常 a 为分度系数,T 叫时间常数,由式(1-1)可知,采用无源超前网络进行串联校正 时,整个系统的开环增益要下降 a 倍,因此需要提高放大器增益交易补偿. 如果对无源超
第一章系统分析与控制方案的确立 1.系统分析 图1.1所示为某工业生产中的加热炉,其任务是将被加热物料加热到一定温度,然后送到下道工序进行加工。加热炉工艺过程为:被加热物料流过排列炉膛四周的管道后,加热到炉出口工艺所要求的温度。在加热用的燃料油管道上装有一个调节阀,用以控制燃料油流量,以达到控制出口温度的目的。 T1出口 支路1 炉膛 支路2 燃料 被加热物料 图1.1加热炉出口温度系统 由于加热炉时间常数大,而且扰动的因素多,比如原料侧的扰动及负荷扰动;燃烧侧的扰动等,单回路反馈控制系统不能满足工艺对加热炉出口温度的要求。为了提高控制质量,采用串级控制系统,运用副回路的快速作用,有效地提高控制质量,满足生产要求。 2.串级控制系统的设计 加热炉工艺过程为:被加热物料流过排列炉膛四周的管道后,加热到炉出口工艺所要求的温度。在加热用的燃料油管道上装有一个调节阀,用以控制燃料油流量,以达到控制出口温度的目的。由于加热炉时间常数大,而且扰动的因素多,比如原料侧的扰动及负荷扰动;燃烧侧的扰动等,单回路反馈控制系统不能满足工艺对加热炉出口温度的要求。为了提高控制质量,采用串级控制系统,运用副回路的快速作用,以加热炉出口温度为主变量,选择滞后较小的炉膛温度为副变量,构成炉出口温度与炉膛温度的串级控制系统有效地提高控制质量,以满足工业生产的要求,系统的串级控制结构图如图1.2所示。
图 1.2 加热炉出口温度串级控制系统结构图 串级控制系统的工作过程,就是指在扰动作用下,引起主、副变量偏离设 定值,由主、副调节器通过控制作用克服扰动,使系统恢复到新的稳定状态的 过渡过程。由加热炉出口温度串级控制系统结构图可绘制出其结构方框图,如 图 1.3 所示。 图 1.3 加热炉出口温度串级控制系统结构方框图 (1) 主被控参数的选择 应选择被控过程中能直接反映生产过程中的产品产量和质量,又易于测量 的参数。在加热炉出口温度与炉膛温度的串级控制系统中加热炉出口温度为系 统的主被控参数,因为加热炉出口温度是整个控制作用的关键,要求出口物料 温度维持在某给定值上下。如果其调节欠妥当,会造成整个系统控制设计的失 败。 (2) 副被控制参数的选择 从整个系统来看,加热炉的炉膛温度虽然不是我们要控制的直接目标,但 是炉膛温度会很大程度上影响出口物料的温度,因此我们选择炉膛温度为副被 控参数。 (3) 控制器的选择 主控制器的选择:主被控变量是工艺操作的主要指标(温度),允许波动的 度 副控制器 调节阀 主控制器 主检测、变送仪表 副检测、变送仪表 炉膛 出口温度
恒温箱的PID控制 摘要:为满足生产生活中对稳定温度的需求,恒温箱是必不可少的。用PID调节方法控制恒温箱的温度,保证温度在标准范围内稳定。在完成任务的基础上,采用PID整定方法或通过改良PID控制器实现稳、准、快的要求,并在调节过程中发现、整理如何调节PID参数相对最优。 Abstract:To meet the needs of production in the life of stable temperature, constant temperature box is indispensable.Control the temperature of the incubator with the PID method, guarantee the stability of the temperature within the scope of the standard.On the basis of completing the task, using PID setting method or through improved PID controller to realize steady, accurate, fast, and found in the process of adjusting and sort out how to adjust the relative optimal PID parameters. 关键词:PID,恒温箱,整定方法 Key word:Proportion Integration Differentiation,incubator,Setting method