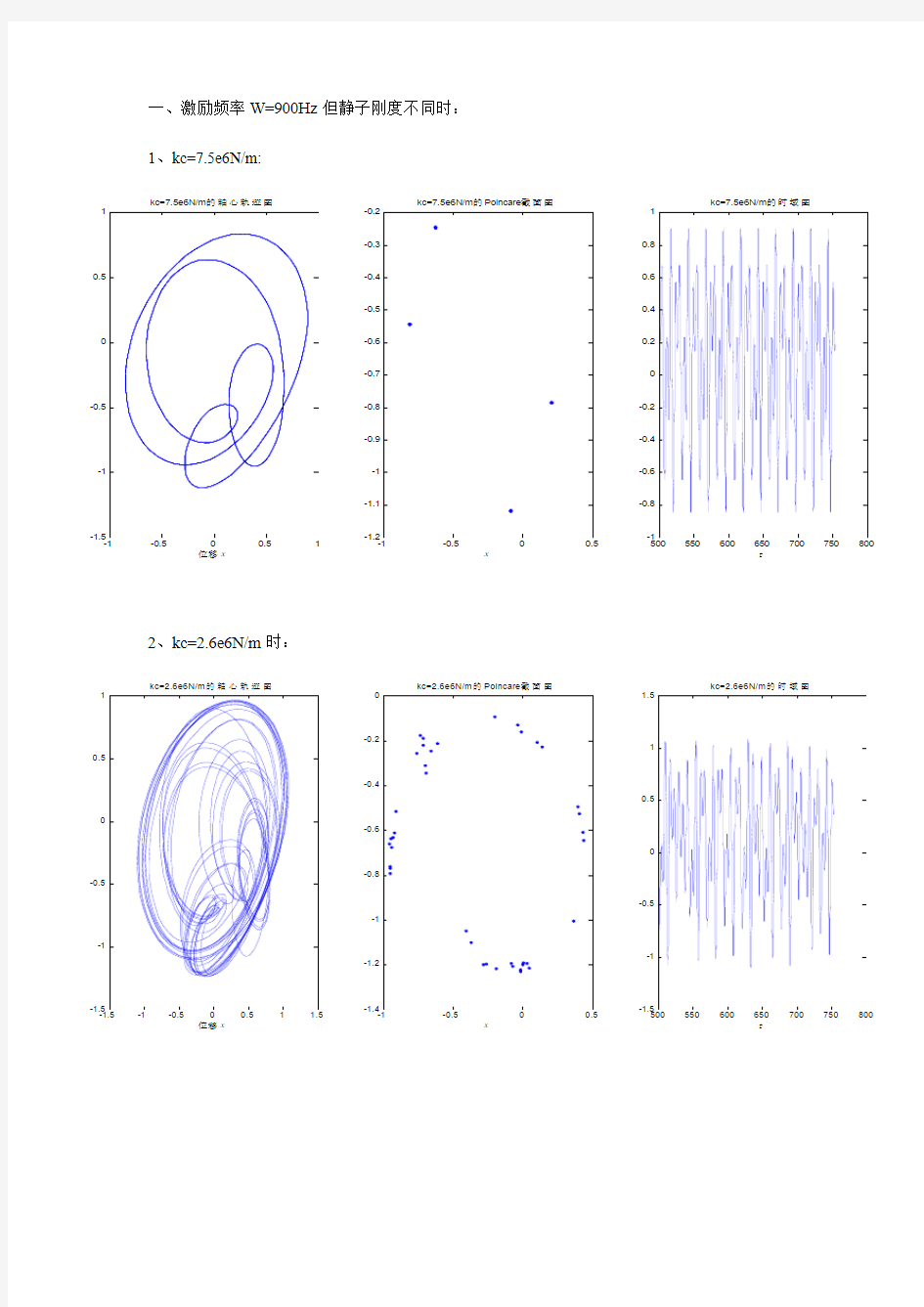

一、激励频率W=900Hz 但静子刚度不同时:
1、kc=7.5e6N/m:
2、kc=2.6e6N/m 时:
位移 x 位移 y
kc=7.5e6N/m 的轴心轨迹图
x
d x /d t
kc=7.5e6N/m 的Poincare 截面图
t
x
kc=7.5e6N/m 的时域图
位移 x 位移 y
kc=2.6e6N/m 的轴心轨迹
图
x
d x /d t
kc=2.6e6N/m 的Poincare 截面图
t
x
kc=2.6e6N/m 的时域图
3、kc=2.9e6N/m 时:
4、kc=3.1e6N/m 时:
位移 x 位移 y
kc=2.9e6N/m 的轴心轨迹图
x
d x /d t
kc=2.9e6N/m 的Poincare 截面图
t
x
kc=2.9e6N/m 的时域图
位移 x 位移 y
kc=3.1e6N/m 的轴心轨迹图
x
d x /d t
kc=3.1e6N/m 的Poincare 截面图
t
x
kc=3.1e6N/m 的时域图
二、静子刚度kc=3.5e6N/m 但激励频率不同时:
1、w=1000rad/s 时:
2、w=1800rad/s 时:
位移 x 位移 y
w=1000rad/s 的轴心轨迹图
x
d x /d t
w=1000rad/s 的Poincare 截面图
t
x
w=1000rad/s 的时域图
位移 x 位移 y
w=1800rad/s 的轴心轨迹图
x
d x /d t
w=1800rad/s 的Poincare 截面图
t
x
w=1800rad/s 的时域图
三、偏心对碰摩转子系统的影响:
1、kc=3.5e6N/m 、w=2300rad/s, b=0.025mm 时:
2、kc=3.5e6N/m 、w=2300rad/s, b=0.03mm 时:
位移 x
位移 y
b=0.025mm 的轴心轨迹图
x
d x /d t
b=0.025mm 的Poincare 截面图
t
x
b=0.025mm 的时域图
位移 x 位移 y
b=0.03mm 的轴心轨迹图
x
d x /d t
b=0.03mm 的Poincare 截面图
t
x
b=0.03mm 的时域图
四、kc=3.5e6、w=2300时不同摩擦系数对碰摩的影响: 1、f=0.1时:
2、f=0.2时:
3、f=0.31时:
位移 x 位移 y
x
d x /d t
t
x
位移 x 位移 y
x
d x /d t
t
x
位移 x 位移 y
x
d x /d t
t
x
一、激励频率W=900Hz 但静子刚度不同时: 1、kc=7.5e6N/m: 2、kc=2.6e6N/m 时: 位移 x 位移 y kc=7.5e6N/m 的轴心轨迹图 x d x /d t kc=7.5e6N/m 的Poincare 截面图 t x kc=7.5e6N/m 的时域图 位移 x 位移 y kc=2.6e6N/m 的轴心轨迹 图 x d x /d t kc=2.6e6N/m 的Poincare 截面图 t x kc=2.6e6N/m 的时域图
3、kc=2.9e6N/m 时: 4、kc=3.1e6N/m 时: 位移 x 位移 y kc=2.9e6N/m 的轴心轨迹图 x d x /d t kc=2.9e6N/m 的Poincare 截面图 t x kc=2.9e6N/m 的时域图 位移 x 位移 y kc=3.1e6N/m 的轴心轨迹图 x d x /d t kc=3.1e6N/m 的Poincare 截面图 t x kc=3.1e6N/m 的时域图
二、静子刚度kc=3.5e6N/m 但激励频率不同时: 1、w=1000rad/s 时: 2、w=1800rad/s 时: 位移 x 位移 y w=1000rad/s 的轴心轨迹图 x d x /d t w=1000rad/s 的Poincare 截面图 t x w=1000rad/s 的时域图 位移 x 位移 y w=1800rad/s 的轴心轨迹图 x d x /d t w=1800rad/s 的Poincare 截面图 t x w=1800rad/s 的时域图
汽轮发电机碰摩 大型汽轮发电机组转动部件与静止部件的碰摩是运行中常见故障。随着大型机组对效率要求不断提高,动静间隙变小,碰摩可能性增加。当前,大型机组的碰摩振动故障的发生率仅次于质量不平衡故障的发生率,成为大机组的第二大类振动故障。碰摩使转子产生非常复杂的运动,轻者使机组出现强烈振动,严重的可造成转轴永久性弯曲,甚至整个轴系毁坏。因此,碰摩振动故障机理的准确分析诊断对确保机组的安全稳定运行,防止重大事故发生具有重要意义。 随着汽轮发电机组向高参数、大容量方向发展,汽轮机动静间隙越来越小,油封、油档、隔板汽封发生动静碰摩的机会越来越多,氢冷发电机的密封瓦也会经常发生动静碰摩现象,此时振动会出现明显变化。升速过程振动快速增长,工作转速下振幅波动,影响机组的安全稳定运行。 因此了解碰摩振动的机理对防止碰摩的产生有着重要的作用,旋转机械的碰摩振动特性随转速的变化而发生很大的变化,不同转速下碰摩振动的机理也不同。 1.碰摩振动机理 1.1.启动升速过程中的碰摩振动机理 大型汽轮发电机组的转子,根据其转速的不同可以分为刚性转子和柔性转子,不同性质的转子系统,其碰摩震动的行为是不完全相同的。这对碰摩故障的诊断带来了难度。现在大型汽轮发电机组毫不例外地都采用柔性转子。柔性转子在不同的转速区工作时,其碰摩震动的行为也不相同。高阶不平衡分布的柔性转子在不同转速区碰摩振动行为如下。 柔性转子的运动方程及其解
在具有粘性阻尼的情况下,不平衡转轴运动微分方程为 )]([22244 )(2s r t i e s a t z t z s z m EJ +=??+??+??ωωε 式中 s ——转轴的轴向坐标; z ——转子的绕度; m ——转子单位长度的质量; EJ ——转子的抗弯刚度; ω——转子的旋转角速度; a (s )——转子偏心距的轴向分布; r (s )——转子偏心方向的轴向分布; ε ——阻尼系数。 上式的解为 n i n n n n t i e l s n iB A e z ?ωπωεωω-∞=∑+-+?=sin )4)1(122 22 2212tan ω ωεω?-=-n n 从上式可知,当n 取值为1时,表示转子存在一阶不平衡分布,其振型为一阶振型;当n 取值为2时,表示
转子故障振动机理分析 转子故障引起振动有许多形式, 现对其中的几个典型振动故障产生的原因及其对应的振动机理进行如下分析: 1.转子不平衡故障及振动机理分析 转子不平衡包括转子系统的质量偏心及转子部件出现缺陷;转子质量偏心是由于转子的制造误差、装配误差、材料不均匀等原因造成的,称为初始不平衡。转子部件缺损是指转子在运行中由于腐蚀、磨损、介质结垢以及转子受疲劳力的作用,使转子的零部件(如叶轮、叶片等)局部损坏、脱落、碎片飞出等,造成的新的转子不平衡。转子质量偏心及转子部件缺损是两种不同的故障,但其不平衡振动机理却有共同之处。 振动机理分析:旋转过程中,转子产生不平衡离心力与力矩通过支承点作用在轴及轴承上,引起振动.设转子质量为M(包括偏心质量m),偏心距e,旋转角频率w=2 f(v f为 v 转动频率),在t瞬时位移在直角坐标系分量x,y,如图6-3所示,则可得转子中心运动微分方程为 图6-3 转子力学模型
则有 以上几式中的K可以近似简化为机器的安装总刚度,M为机器的总质量,为K和M构成的振动体的无阻尼固有频率。为无量纲阻尼因子,它的取值不同,会影响到系统 的响应,是激励频率与固有频率之比,也是无量纲因子。根据上式,按不同的频率比和阻尼系数的变化,作出幅频响应图及相频响应图,如下图所示: 图6-4 幅频响应图及相频响应图 转子不平衡所引起振动有下列特点:振动方向为径向,振动的特征频率等于转频;转子的轴承均发生较大的振动;在转子通过临界转速时振幅有特别显著的增大;在高速下随转轴转速上升振动很快增大;振动频率与转速相等且为正弦波;在没有带负荷时振动就达到最大值. 2.转子不对中故障振动机理分析 机组各转子之间由联轴器联接构成轴系,传递运动和转动。由于机器的安装误差、承载后的变形以及机器基础的沉降不均等,造成机器工作状态时各转子轴线之间产生轴线平
第一章绪论 1.1 研究背景及意义 旋转机械是以转子、齿轮、轴承等回转部件为主体的设备,在企业生产中处于核心 地位。当它们发生故障时,会带来一系列的经济损失。随着旋转机械运转速度的日益提高,机械设备集成化发展,系统的非线性将更加突出,可能直接(或间接)导致转子系 统发生不平衡、不对中、碰摩、松动等故障。其中,转静碰摩是其非常普遍的一种故障[1] ,其发生频率随转定子间的密封间隙的减少而增加。与其它故障相比,碰摩故障更容 易引起整机振动过大,引起耦合效应,导致系统结构破坏,生产效率低下,缩短其使用 寿命等一系列后果。因此,探究转子碰摩故障机理,研究其故障信号特征的提取,实现 智能诊断,获得可靠有效的诊断结果具有十分重要的现实指导意义。 碰摩故障是一种典型的多发性事件,是由其他故障或是由耦合故障所带来的“二次 效应”[2] 。碰摩故障一般伴随有不平衡、不对中故障,两种或两种以上故障相互影响形成耦合。尽管目前不少研究人员针对不平衡-碰摩、不对中-碰摩耦合故障进行了研究, 但由于耦合故障的振动响应呈现非线性特点,对信号的分解存在一定难度,不能很好地 提取出故障的特征。 含有碰摩故障的耦合振动信号具有冲击、不平稳的特性,这给耦合故障的检测和特 征提取带来一定难度。常用的信号处理方法,对单一故障的特征提取,具有很好地分析 效果,但在研究耦合故障时,难以得到有用的特征信息。因此,以碰摩和碰摩耦合故障 为研究对象,研究出能够处理非均布信号的方法,实现故障特征提取和诊断,具有十分 重要的现实意义。 1.2 国内外研究现状 1.2.1 转子碰摩故障机理的国内外研究现状 目前,人们针对碰摩故障的机理从非线性动力学模型、动力学响应等方面进行了研 究,发表了许多有价值的的论文。Agnieszka Muszynska [3] 就在其《Rotor Dynamics》— 书中,建立了边界约束条件较为完备的转子碰摩力模型,引入弹性恢复力来表示碰摩产 生的碰撞,详细描述了碰摩的分类情况,并分析了局部碰摩和整周碰摩的故障特征,但 没有考虑定子的弹性。Muszynska [4] 在建立的模型中引入了弹性恢复系数,为了降低动 力学分析的难度,假设定子在碰摩的过程中不发生弹性变形,计入碰摩过程中的能量损失,由此该模型只能用于研究单点和局部碰摩的情况。SawiCki [5] 建立的动力学模型中,郑州轻工业学院硕士学位论文 2 将定子简化为具有一定质量弹性的基础支承,假设转定子碰撞过程收到了弹性力和切向 摩擦力,计算弹性力的的摩擦系数与转定子之间的相对转速有关。沈小要[6] 建立了具有初始弯曲的不平衡Jeffcott转子碰摩力模型,在非线性油膜力的作用下,判断是否发生了 碰摩,并动态检测出碰摩开始时的转速。 在转子碰摩的动力学响应分析方面,Ehrich [7] 研究了局部碰摩的动力学响应,在过 渡区域中的超谐波阶段里,出现了混沌现象。胡鸾庆[8] 建立了偏心Jeffcott碰摩模型,考虑局部碰摩力变化,在不同平衡力、阻尼、转速的情况下,仿真分析局部碰摩的拟周期 结果和混沌、分叉现象,并提出了检测早期微弱碰摩信号的方法:Duffing方程外轨解的 最大轨道所对应的分叉阈值法。吴敬东[9] 研究了理想转子的单点碰摩情况,绘制Poincare 截面图,研究碰摩产生的周期分岔、拟周期和混沌运动形式。褚福磊和张正松[10] 分析了碰摩转子系统在油膜力的作用下,产生的倍周期分叉和拟周期运动,并将转速和不平衡 量作为控制参数研究运动的路径和形式。 1.2.2 转子碰摩耦合故障机理的国内外研究现状
旋转机械(转子)故障诊断 摘要:旋转机械故障诊断技术在企业中的应用能够及早发现设备故障、防止生产线停工、避免重大事故。本文首先展示了国内外转子故障诊断技术现状,回顾过往不平衡模拟实验通过对振动特征的分析研究总结了不平衡的振动特征。而后再利用振动信号分析处理方法以及时一频分析技术,对转子系统的不平衡、不对中两个典型的故障诊断做了详细的介绍。由于技术发展,以后的转子故障诊断将朝着自动化、智能化方向发展。 关键词:旋转机械;不平衡;不对中;故障诊断 Vibration Faults in Rotor System Abstract: Application of the rotating machinery fault diagnosis technology in the enterprise can predicte equipment failure, prevent shutdown the production line , avoid major accidents. This paper shows the present situation of rotor fault diagnosis technology at home and abroad at first, retrospects the imbalance simulation experiment based on the analysis of the vibration characteristics of the study summarized the unbalanced vibration characteristics. Then,with the vibration signal analysis method and spectrum analysis technology, I will introduce imbalance and misalignment two typical fault diagnosis in detail. Due to the technical development, the rotor fault diagnosis will develop in automatic and intelligent direction. Keywords: Rotating Machinery; Imbalance;Misalignment ; Fault Diagnosis
转子碰摩、摩擦故障分析 一、机理分析 在旋转机械中,由于转子弯曲、转子不对中引起轴心严重变形,间隙不足和非旋转部件弯曲变形等原因引起转子与固定件接触碰撞而引起的异常振动时有发生。转子碰摩、摩擦是一个复杂的过程,其主要表现为振动响应的随机性和频谱的非线性特征,从机理上分析,摩擦振动对转子有以下四方面的影响: 1)直接影响 转子运动可分为自转和进动(即公转)两种形式。摩擦对自转的影响在于附加了一个力矩,因此,在转子原有力矩不变的条件下有可能使转子转速发生波动。至于进动,由于摩擦力的干预可能使正进动转化为反进动,特别是全周摩擦,常常产生所谓的“干摩擦”现象,从而引起自激振动,影响转子的正常运行,甚至损坏机组。 2)间接影响 摩擦的作用使动静部件相互抵触,相当于增加了转子的支承条件,增大了系统的刚度,改变了转子的临界转速及振型。且这种附加支承是不稳定的,从而可能引起不稳定振动及非线性振动。 3)冲击影响 局部碰摩除了摩擦作用外还会产生冲击作用。其直观效应是给转子施加了一个瞬态激振力,激发转子以固有频率作自由振动。虽然自由振动是衰减的,但由于碰摩在每个旋转周期内都产生冲击激励作用,在一定的条件下有可能使转子振动成为叠加自由振动的复杂振动。 4)热变形 摩擦引起的热变形可能引起转子弯曲,加大偏心量,使振动增大。 二、转子碰摩、摩擦的特征分析 摩擦分全圆径环形摩擦和局部摩擦两种,其特征有:a) 振动频带宽,既有与转速频率相关的低频部分,也有与固有频率相关的高次谐波分量,并伴随有异常噪声,可根据振动频谱和声谱进行判别;b) 振动随时间而变。在转速、负荷工况一定,由于接触局部发热而引起振动矢量的变化,其相位变化与旋转方向相反;c)接触摩擦开始瞬间会引起严重相位跳动(大于100°相位变化)。局部摩擦时,无论是同步还是异步其轨迹地带有附加的环(说明相位在很大的变化)。
基于实验的碰摩转子系统故障的双谱特征! 王立平叶佩青汪劲松 "清华大学精密仪器与机械学系北京#$%%%&’( 杨叔子 "华中科技大学机械科学与工程学院武汉#’)%%*’( 摘要依据高阶统计量和双谱分析的基本原理+算法及其在工程中的理解#针对碰摩转子系统在运行过程中所监测到的振动信号实验数据进行了双谱分析#并依据碰摩和油膜振荡等故障特征的理论分析对故障所呈现的双谱特征进行了合理的解释#从而提出了基于双谱分析碰摩转子故障特征提取的新方法, 关键词-转子.非线性.碰摩实验.双谱应用 中图分类号-/)0.12$)) 引言 由转子的质量不平衡可导致转子与套筒之间的碰摩#还会造成转子的热不稳定#从而进一步加剧了转子的热弯曲#反过来又会加剧碰摩,在多数场合#局部碰摩往往发生在全碰摩之前#这种碰摩会引起转子的不规则振动,随着振动的加剧#碰摩性质发生变化#由局部碰摩向全碰摩过渡,多数情况下#当机器历经了全碰摩后#立即发生严重损坏,因此#对碰摩故障的研究一直是旋转机械中一个深受关注的问题#许多学者正寻求更好的分析方法和工具以便更有效地来描述故障特征3$4’5, 由于确定性过程和随机过程的功率谱分析是数字信号处理中最基本和最有用的工具之一#故到目前为止功率谱分析已广泛应用于通信+雷达+声纳+语音+生物医学+地球物理等众多领域中,已提出的各种谱分析方法可分成非参数化法和参数化法两大类,功率谱所包含的信息基本上是在自相关函数中所含的信息#这对于高斯过程的完全统计描述是足够的#但是却不能获得有关高斯性的偏离度和非线性存在信息,相比之下#用高阶累积量定义的高阶谱却含有这样的信息#更能有效地描述和反映非线性系统所呈现的特征,和谱分析一样#高阶谱分析也分为参数化法和非参数化法两大类365, 非高斯信号处理是信号处理的一个新领域,以往由于缺乏分析工具#人们把许多实际过程都当作正态分布或高斯分布来处理,与以二阶统计量作为分析工具的传统信号处理不同#非高斯信号处理使用高阶统计量作为主要分析工具#在对非高斯性+非线性+非因果+非最小相位以及高斯有色噪声等问题的处理中是非常有用的,因此#本文依据高阶统计量的基本原理并采用双谱分析法#对碰摩转子系统在运行过程中的实测数据进行了分析#并依据碰摩和油膜振荡等故障特征的理论分析对故障所呈现的双谱特征进行了合理的解释#从而提出了基于双谱分析碰摩转子故障特征提取的新方法, $双谱及其估计算法 设随机过程78"9(:是零均值的与平稳的#其;阶累积量定义为 <;8"=$#=0#>#=;?$(@ A78"9(8"9B=$(>8"9B=;?$(:"$(相应地#;阶谱定义为;阶累积量的";?$(维离散时间傅里叶变换#即 C;8"D$#D0#>#D;?$(@E F =$@?F > E F =;?$@?F <;8"=$#=0#>#=;?$(G H I3?J E ;?$ K@$ D K=K5"0( 特别地#三阶谱C )8"D$#D0( 叫双谱#用L 8"D$#D0( 表 示#四阶谱C ’8"D$#D0#D)( 称三谱#用M 8"D$#D0#D)(表示,依据多谱的定义和三阶累积量的对称性质#可 以推出双谱具有对称性#即在D 0N%#D$N D0#D$B D0 O P内的双谱知识对双谱的完整描述已经足够了, 第$6卷第$期0%%0年)月 振动工程学报 Q R S T U V W R X Y Z[T V\Z R U]U^Z U G G T Z U^ Y R W_$6‘R_$ aV T_0%%0 ! 国家b九五c攀登计划预选项目"编号-d e f60$f%&(#中国博士后科学基金资助项目"编号-中博基3$f f&5f号(收稿日期-0%%%g%f g$f.修改稿收到日期-0%%$g%’g0) 万方数据