灰度图像下车牌定位与分割算法研究概要
- 格式:doc
- 大小:214.50 KB
- 文档页数:12
基于灰度图像的车牌定位算法研究与实现作者:郭亚王水波来源:《现代电子技术》2008年第02期摘要:汽车牌照的自动定位是智能交通系统中的重要组成部分之一,是实现车牌识别(LPR)系统的关键。
针对不同背景和光照条件下的车辆图像,提出了一种基于灰度图像灰度变化特征进行车牌定位的方法。
依据车牌中字符的灰度变化以峰、谷规律分布确定车牌上下边界,对扫描行采用灰度跳变法确定车牌左右边界。
测试结果表明,该方法是可行的。
关键词:车牌定位;灰度图像;灰度变化;智能交通中图分类号:TP391.14 文献标识码:B 文章编号:1004-373X(2008)02-137-03GUO Ya,(School of Information Engineering,Chang′an University,Xi′an,71Abstract:The automated license plate location is an important part in the intelligent traffic system.It is the key step in the Vehicle License Plate Recognition(LPR).A method for the recognition of images of different backgrounds and different illuminations is proposed in the paper.the upper and lower borders are determined through the gray variation regulation of the character distribution.The left and right borders are determined through the black-white variation of the pixels in evKeywords:license plate locating;gray image;1 引言近年来,智能交通系统(ITS)越来越受到人们的重视,并逐渐应用在交通信息统计收集、路车间通信、停车场管理、不停车自动收费、车辆自动行驶等领域,而上述领域都与汽车牌照的自动识别有关。
车牌的定位与分割实验报告一实验目的针对交通智能系统所拍摄的汽车图片,利用设定的算法流程,完成对汽车车牌部分的定位,分割车牌部分,并完成字符的分割,以便于系统的后续分析及处理。
二实验原理详见《车牌的定位与字符分割》论文。
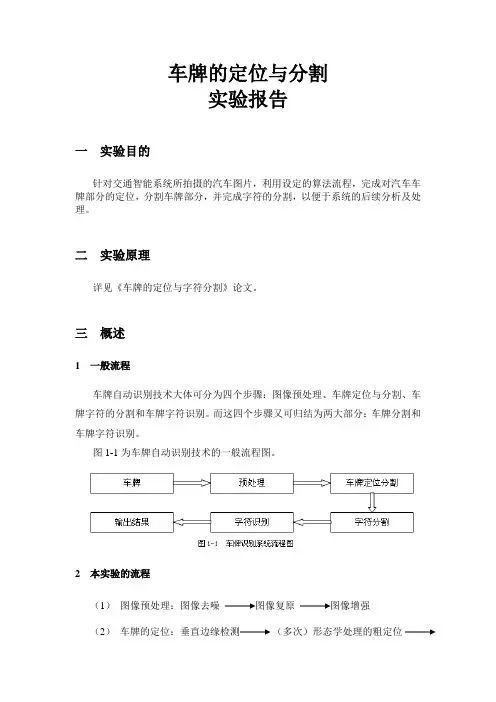
三概述1一般流程车牌自动识别技术大体可分为四个步骤:图像预处理、车牌定位与分割、车牌字符的分割和车牌字符识别。
而这四个步骤又可归结为两大部分:车牌分割和车牌字符识别。
图1-1为车牌自动识别技术的一般流程图。
2本实验的流程(1)图像预处理:图像去噪(2)车牌的定位:垂直边缘检测(多次)形态学处理的粗定位合并邻近区域结合车牌先验知识的精确定位(3)车牌预处理:车牌直方图均衡化倾斜校正判定(蓝底白字或者黄底黑字)归一化、二值化(4)字符的分割:垂直投影取分割阈值确定各个字符的左右界限(结合字符宽度、间隔等先验知识)分割字符四实验过程4.1图像预处理4.1.1图像去噪一般的去噪方法有:空间域上的均值滤波和中值滤波;频率域上的巴特沃斯滤波器。
图4-1是各滤波器处理椒盐噪声的效果。
a.被椒盐噪声污染的图片 b.均值滤波的效果图 c.中值滤波的效果图 d.BLPF的效果图图4-1 各滤波器处理椒盐噪声的仿真可见,中值滤波对椒盐噪声的处理效果极好,而一般所拍摄的图片上最多的便是孤立的污点,所以此处以中值滤波为主进行去噪。
图4-2是采用中值滤波处理实际汽车图片的效果。
a.原始图像b.灰度图像c.中值滤波后的图像图4-2 中值滤波处理实际汽车图片的效果很显然,经过中值滤波后去除了原图上的部分污点。
4.1.2图像复原由于通常情况下都不知道点扩展函数,所以我们采用基于盲解卷积的图像复原策略。
图4-3~4-7图是函数进行盲解卷积的实验结果,其中图4-3是图像cameraman 的模糊图像。
图4-3 模糊图像在盲解卷积处理中,选择适当大小的矩阵对恢复图像的效果很重要。
PSF的大小比PSF的值更重要,所以首先指定一个有代表性的全1矩阵作为初始PSF。
车牌识别系统中车牌定位及分割技术研究摘要随着经济社会的进展,我国汽车数量,尤其是私家车数量大量增加。
这对交通公共基础设施的建设和与其配套的车辆管理系统提出了更高的要求。
为实现道路交通管理的自动化和车辆行驶的智能化,各类智能交通系统应运而生。
汽车牌照是肯定汽车的有效手腕,因此车辆牌照识别技术在智能交通管理中发挥着基础性的重要作用。
车牌识别技术主要包括以下三个部份:车牌定位技术、车牌的字符分割技术和字符识别技术。
车牌定位的任务就是肯定出车牌在图像中的具体位置;车牌定位是车牌识别系统完成图像收集后对图像进行处置的第一步,分割是对车牌进行识别的基础。
本文的对车牌识别系统中车牌定位及分割研究的大致方式为:第一对图像进行预处置,包括灰度化、维纳滤波去噪和利用边缘检测函数对图像边缘化,再利用Hough变换对图像进行矫正,按照边缘图像的直方图对图像进行切割,提取主要车牌区域。
最后按照主要车牌区域的灰度直方图肯定二值化阈值,按照车牌区域特征对主要车牌区域进行字符图像有效信息的分割。
用MATLAB软件对上述步骤进行仿真,实验结果表明,应用上述方式能够分割出汽车牌照图像的有效信息,而且效果较好。
关键词:图像分割;边缘检测;车牌识别Research on License Plate Localization and Segmentation TechnologyAbstractWith the development of economic society, number of cars in our country, especially the number of private cars has increased a lot。
This have put forward higher requirements for the traffic infrastructure construction and its supporting vehiclemanagement system. In order to realize the road traffic management automation and the vehicle intelligent, intelligent traffic system emerge as the times require. Vehicle license plate is a effectively way to identify the car, thus the vehicle license plate recognition technology plays a fundamental role in intelligent traffic management. License plate recognition technology mainly include three parts,such as the license plate location technology, the character segmentation technology and the character recognition technology. The task of license plate location technology is to determine the specific location in image license. License plate location is the first step. The character segmentation technology is based on license plate recognition. In this paper, the method about license plate recognition system for license plate location and segmentation is, firstly, image preprocessing, including gray-scale, Wiener filter denoise and edge detection function of image edge. Second using Hough transform for image correction, cutting the image according to the histogram of edge of image to extraction of main plate region. Finally, according to the histogram of the gray image of the main plate region to determine the threshold of binarization and according to the characteristics of license plate region to segmentation the effective information of the character image. The experimental results show that, using MATLAB software simulation, application of the method can segment the effective information of the character image in license plate, and the effect is better.Key words: Image segmentation; Edge detection; Vehicle license plate recognition目录摘要 (1)Abstract (2)目录 (4)1 绪论 (5)选题的背景和目的 (5)国内外研究状况 (6)应用范围 (7)本论文内容介绍 (8)2............................................................................................................................................. 车牌图像预处置9车牌区域特征 (9)图像的灰度化 (10)图像的去噪 (12)2.3.1线性低通滤波 (12)2.3.2维纳(Wiener)滤波 (13)边缘检测 (14)2.4.1 Roberts算子 (14)2.4.2 Sobel 算子 (15)2.4.3 P rewitt算子 (15)2.4.4 LOG算子 (16)2.4.5 Canny算子 (17)2.4.6拉普拉斯算子 (17)3倾斜度矫正与车牌区域定位 (20)倾斜度矫正 (20)图像的定位 (26)4 二值化与字符分割 (28)图像的二值化 (28)字符的分割 (31)4.2.1垂直投影分割 (31)4.2.2字符结构特征分割 (33)结论 (36)致谢 (37)参考文献 (38)附录A设计主程序 (39)1 绪论选题的背景和目的随着经济全世界化和信息时期的来临,运算机技术、通信技术和运算机网络技术进展超级迅速,自动化的信息处置能力和水平也在不断提高,并在人们的社会活动和实际生活的各个领域取得普遍应用。
车牌识别算法概要设计车牌识别算法是一种利用计算机视觉技术,通过图像处理和模式识别的方法,从车辆图像中提取车牌信息的算法。
车牌识别算法在交通管理、停车场管理、违章监测等领域有着广泛的应用。
下面将从图像预处理、车牌定位、字符分割和字符识别等几个方面来介绍车牌识别算法的概要设计。
1.图像预处理:图像预处理是指对输入的车辆图像进行一系列预处理操作,以提高车牌区域的可见度和图像质量。
常见的图像预处理操作包括灰度化、降噪、直方图均衡化、图像增强等。
灰度化操作将彩色图像转化为灰度图像,降低了图像的维度,减少了计算量。
降噪操作可以去除图像中的噪声干扰,以提高后续处理的准确性。
直方图均衡化可以增强图像的对比度,使车牌区域更加突出。
图像增强操作可以通过增加图像的亮度、对比度等方式,进一步提高图像质量。
2.车牌定位:车牌定位是指从预处理后的车辆图像中找出车牌所在的位置。
车牌一般有固定的形状和大小,因此可以通过一些特征来进行定位。
常见的车牌定位方法包括边缘检测、颜色识别、形状匹配等。
边缘检测可以通过检测图像边缘上的强度变化来找到车牌的轮廓。
颜色识别可以通过分析车牌区域的颜色特征来进行定位。
形状匹配可以通过与预先定义的车牌形状模板进行比对来找到车牌区域。
3.字符分割:字符分割是指将定位出的车牌区域进一步切割成单个字符。
由于车牌中的字符数目和大小是固定的,因此可以通过一些特征来进行字符分割。
常见的字符分割方法包括基于连通区域的方法、基于投影的方法和基于模板的方法等。
基于连通区域的方法可以通过分析字符间的连通关系来进行字符分割。
基于投影的方法可以通过分析字符在垂直或水平方向上的投影分布来进行字符分割。
基于模板的方法可以通过与预先定义的字符模板进行匹配来进行字符分割。
4.字符识别:字符识别是指将分割出的单个字符进行识别,获取字符的具体信息。
字符识别是整个车牌识别算法中最关键的一步,也是最为复杂的一步。
常见的字符识别方法有基于模板匹配的方法、基于统计学习的方法和基于深度学习的方法等。
图像处理技术在车牌识别中的使用技巧研究随着交通日益增多,车牌识别系统扮演着重要的角色,确保交通安全和管理。
图像处理技术在车牌识别中的应用已经取得了显著的进展,并且在许多实际应用中得到了广泛的应用。
本文将探讨车牌识别中的图像处理技术,并提出一些使用技巧,以提高准确性和效率。
一、图像预处理在车牌识别中,预处理是非常重要的一步,其目的是消除噪声、增强车牌图像的对比度和清晰度。
以下是一些常用的图像预处理方法:1. 图像的灰度化通过将彩色图像转换为灰度图像,可以减少计算量并简化后续处理步骤。
使用加权平均灰度法或者基于亮度感知的方法进行灰度化。
2. 去噪噪声会干扰车牌的识别过程,通过应用滤波算法,如中值滤波或高斯滤波,可以有效减少图像中的噪声。
3. 增强对比度使用直方图均衡化技术可以增强图像的对比度,使得车牌字符更加清晰可辨。
二、车牌定位车牌定位是车牌识别中的一个关键步骤,其目的是检测图像中的车牌位置。
以下是一些常用的车牌定位方法:1. 基于边缘检测的方法在车牌图像中,车牌和背景之间存在明显的边缘差异。
通过应用边缘检测算法,如Canny算法、Sobel算法或拉普拉斯算法,可以提取车牌图像的边缘特征,进而定位车牌。
2. 基于颜色的方法车牌通常具有特定的颜色特征,如中国车牌一般为蓝色。
通过分析图像中的颜色信息,可以筛选出可能的车牌区域。
可以使用颜色模型转换、颜色阈值分割等技术实现。
三、字符分割字符分割是将车牌区域中的字符分离为单个字符的过程。
以下是一些常用的字符分割方法:1. 基于投影的方法字符分割通常通过分析字符在水平或垂直方向上的投影信息来实现。
通过计算投影峰值和波谷之间的间距,可以判断字符之间的分割位置。
2. 基于联通区域的方法字符之间通常存在一定的连通性,通过分析车牌上字符的连通区域,可以实现字符的分割。
可以利用连通域标记算法或基于连通性分析的方法。
四、字符识别字符识别是车牌识别的核心步骤,其目的是将分割得到的字符识别为相应的字符。
《数字图像处理》研究报告——车牌定位与分割方法研究(2008/2009学年第二学期)车牌定位与分割方法研究1、前言随着公路逐渐普及,我国的公路交通事业发展迅速,所以人工管理方式已经不能满着实际的需要,微电子、通信和计算机技术在交通领域的应用极大地提高了交通管理效率。
汽车牌照的自动识别技术已经得到了广泛应用。
汽车牌照自动识别整个处理过程分为预处理、边缘提取、车牌定位、字符分割、字符识别五大模块,其中字符识别过程主要由以下3个部分组成:①正确地分割文字图像区域;②正确的分离单个文字;③正确识别单个字符。
用MATLAB软件编程来实现每一个部分,最后识别出汽车牌照。
在研究的同时对其中出现的问题进行了具体分析,处理。
作为现代社会的主要交通工具之一的汽车, 在人们的生产、生活的各个领域得大量使用, 为快速、高效地进行车辆的管理和监控,实现交通管理的自动化、智能化,车牌识别技术在智能交通系统中成为核心技术之一,而图像处理技术能将输入的车辆图像通过处理和识别,转换为车牌号的字符串形式,为车牌识别的后续计算机处理奠定了基础,在其中起着关键性的作用。
数字图像处理已经成为一门独立的新学科,并有着广泛的应用,正在空间、时间和功能上的扩展人类视觉。
2、图像预处理先对视频采集的车牌图像进行必要的预处理,有助于进一步的识别。
图像预处理包括:图像的复原和图像的变换等。
2.1 图像的复原在一些场合输入的图像很有可能是模糊不清的, 也就是说存在噪声的影响,通常存在影响的因素是多方面的,如光线和天气条件的变化、角度不合适、同类型的车牌字符和车牌背景的细微差别等都有可能使图像模糊不清。
因此要对图像进行复原。
在不同的环境下对具体的图像的复原方法也不同, 例如由于均匀直线运动而引起的复原,几何畸变复原等等。
2.2 图像的变换原始图像的数据一般比较大,对其进行处理的时间一般也较长,而由于实时性的要求,车牌的提取需要一次处理性就能把绝大多数特征提取出来,而尽可能的不要利用后面的结果来调整这一步的工作。
第 43 卷 第 2 期 中山大学学报 (自然科学版)V ol 43 No 22004 年 3 月ACTA SCIENTIARUM NATURALIUM UNIVERSITATIS SUNYATSENI Mar 2004车牌定位和分割的一种综合方法张树波 , 赖剑煌(中山大学数学与计算科学学院 , 广东广州 510275摘 要 : 提出了一种基于颜色空间和字频统计结合的车牌分割方法。
该方法是在HSV 彩色空间中 , 充分利用车牌图像提供的彩色信息 , 构造出 5 级灰度图 , 然后采用数学形态学、字频统计方法进行分析和判断 , 确定并分割出汽车牌照。
该方法不受车牌大小、位置以及车牌的背景和光照条件等方面的限制, 适用范围广。
实验表明 , 该方法符合人类的视觉特征 , 效果好 , 精度高 , 对含噪声图像也能有效分割。
关键词 : HSV 彩色空间 ; 数学形态学 ; 字频统计中图分类号 : TP39 文献标识码 : A 文章编号 : 0529 6579 (2004) 02 012604 近年来 , 中国汽车的消费量不断增长 , 车辆管理已经成为智能交通管理中的重要环节。
而数字图像处理和模式识别技术的发展 , 使汽车牌照识别技术成为智能交通领域中的重要研究课题。
如果能够实时采集车辆的图像 , 对其车牌及车号进行正确识别 , 那么将有利于快速、高效地进行车辆的管理和监控 , 实现交通管理的自动化、智能化。
因此 , 车牌识别技术是智能交通系统中的核心技术之一。
车牌识别技术包括牌照定位、牌照分割、字符分割和字符识别 4 个步骤 , 牌照定位技术是整个车牌识别技术的基础和前提 , 牌照定位准确与否 , 直接关系到后续工作能否顺利进行 , 因此 , 汽车图像中牌照的正确定位是车牌识别技术中的关键技术和难点所在。
目前已有不少学者在这方面进行了研究 , 提出了各自的车牌定位和分割方法 , 总结起来主要有如下几类方法 : ①基于颜色的分割方法 , 这种方法主要利用彩色空间的信息 , 实现车牌分割 , 包括彩色边缘算法[1] 、颜色距离和相似度算法[2] 等 ; ②基于纹理的分割方法 , 这种方法主要利用车牌区域水平方向的纹理特征进行分割 , 包括小波纹理[3] 、水平梯度差分纹理[2] 等 ; ③基于边缘检测的分割方法[1 ,4] ; ④基于数学形态学的分割方法[5] 。
车牌识别本文应用图像处理技术、车牌定位技术、车牌分割技术、字符特征提取方法、神经网络识别技术等来解决车辆牌照识别问题,首先将图像进行灰度化、灰度拉伸、中值滤波的预处理方法,很好地消除了图像的噪音,强化了纵向纹理区;通过对车牌特征和定位技术的深入研究,提出了基于水平扫描和垂直投影法的车牌定位方法,能够很准确地搜索到车牌区域;基于车辆牌照的一些结构特点及先验知识,完成了基于投影直方图的车牌字符分割域;最后对神经网络的构成以及相关的理论进行了讨论,着重分析了神经网络的理论原理和在字符识别中的应用方法。
例如车辆牌照中省份汉字的识别问题,1988年戴营等利用常见的图像处理技术方法提出汉字识别的分类是在抽取汉字特征的基础上进行的.根据汉字的投影直方图(Projection Histogram),选取浮动阈值,抽取汉字在y方向的峰值,利用树形查表法进行汉字的粗分类;然后根据汉字在x方向的投影直方图,选取适当阈值,进行量化处理后,形成一个变长链码,再用动态规划法,求出与标准模式链码的最小距离,实现细分类,完成汉字省名的自动识别.车牌字符识别系统的字量小,包括50多个汉字,24个大写英文字母,10个数字,总共仅80多个字符。
而且车牌的制作有国家统一的标准,字符的大小一致,字型统一。
相对于普通的字符识别,难度降低了。
但从实用的角度看,车辆牌照识别系统应该是一个全自动的、实时的系统,因此要求有较高的识别速度和正确率。
目前牌照自动识别技术尚未达到很完美的程度,但是在国外由于高速公路和收费停车场发展较早,己经成功地开发了一些类似的自动系统。
虽然,国外汽车牌照识别系统的研究工作有一定进展,但并不尽合我国国情,这主要是因为以下五个方面的原因:(1)我国标准汽车牌照是由汉字、英文字母和阿拉伯数字组成,汉字的识别与字母和数字的识别有很大的不同,从而增加了识别的难度;(2)国外许多国家汽车牌照的底色和字符颜色通常只有对比度较强的两种颜色(例如韩国,其车牌底色为红色,车牌上的字符为白色),而我国汽车牌照仅底色就有蓝、黄、黑、白等多种颜色,字符颜色也有黑、白等若干种颜色:(3)其他国家的汽车牌照格式(如汽车牌照的尺寸大小,牌照上的字符排列等)通常只有一种,而我国则根据不同车辆、车型、用途,规定了多种牌照格式(例如分为军车、警车、普通车等);(4)我国汽车牌照的规范悬挂位置不唯一:(5)由于环境、道路或人为因素造成汽车牌照污染严重,这种情况下,国外发达国家不允许上路,而在我国仍可上路行驶。
灰度图像下车牌定位与分割算法研究刘培锋 1 张文斌 1 王祁 1(1. 哈尔滨工业大学电气工程及自动化学院、哈尔滨工业大学 351信箱、150001摘要:给出了一种能在复杂交通环境下对汽车牌照进行定位和分割的算法。
算法都是基于灰度图像的。
在定位算法中,首先对图像进行边缘检测和水平膨胀,然后进行连通区域分析、水平聚类,最后对得到的车牌候选区域进行模糊决策,找出真正车牌区域,很好的解决了伪车牌问题。
在分割算法中,利用最小二乘法对车牌进行倾斜校正,利用可变小模板对字符进行分割。
实验证明,定位准确率为 97%,分割准确率为 95.3%,具有非常好的效果。
关键词 :连通区域;水平聚类;模糊决策;最小二乘法中图分类号:TP391.4文献标识码:AStudy on the Location and Segmentation Algorithmof Vehicle License Plate with Gray ImageLIU Pei-feng ZHANG Wen-bin WANG Qi(P.O.BOX 351, School of Electrical Engineering and Automation, Harbin Instituteof Technology, 150001Abstract: An algorithm to obtain location and segmentation of vehicle license plate under complicated traffic background is provided. The algorithm is based on gray image. In the study on this localization algorithm, firstly image edge detection and horizontal dilate are carried out, then connected area analysis and horizontal clustering are presented, finally in order to better solved the problem of false vehicle plate, the fuzzy decision-making is carried on the obtained vehicle license area. In the study on segmentation, leastsquares method is used for tilt correction, and variable small template is used for character segmentation. Experimental results show that the method is quite effective, and the plate location rate of success is 97.8%, the character segmentation rate of success is 95.3%. Key words: Connected area; Horizontal clustering; Fuzzy decision-making; Least squares method1引言车牌自动识别是计算机视觉、图像处理与模式识别技术在智能交通领域应用的重要研究课题之一,是实现交通管理智能化的重要环节 [1],主要包括车牌定位、字符分割和字符识别 3个关键环节。
其中,车牌定位主要是从复杂背景区域中把车牌分离出来,而字符分割主要是将字符从车牌中切分出来。
在车牌识别中,车牌定位、字符分割是识别的前提和基础,它们效果的好坏直接影响识别的效果。
由于背景复杂、图像污损等原因,车牌定位、分割都不能达到让人满意的程度,因此车牌定位、分割还有待于进一步研究。
目前车牌定位的方法主要有两类:基于彩色图像信息 [2]和基于灰度图像信息的定位方法 [3],前者一般需要进行颜色空间变换,计算量较大,而且当图像亮度降低到一定程度,特别是在夜晚条件和光照不均情况下,图像将可能变成非彩色的,具有很大的局限性。
因此出现了很多基于灰度图像的定位方法,例如基于形状、纹理特征的 [4],基于小波变换和行扫描的,以及基于 BP 神经网络的定位方法 [5],这些方法一般计算量较大,对背景简单图像具有一定效果,但是对于复杂环境却有一定的局限性。
本文给出一种基于灰度图像的、利用连通区域水平聚类和模糊决策的定位方法以及利用最小二乘法进行倾斜校正,可变小模板进行切分的字符分割方法,在复杂的环境条件下取得了很好的效果。
2车牌定位在复杂环境下我们对图像进行车牌定位, 首先对图像进行预处理, 以改善图像质量。
由于环境的复杂, 水平聚类定位得到的区域可能会有一些伪车牌区域,因此我们采用模糊决策方法找出真正的车牌区域。
2.1预处理与边缘检测本文研究基于灰度图像的车牌定位算法,所以首先将彩色车牌图像转化为灰度图像,图 1、图 3即为基金项目:黑龙江省交通基金资助项目(HJZ_2004_12 项目名称:重载车辆对水泥混凝土路面破坏作用的研究图像 fig1、 fig2的灰度图像。
由于图像均来自实际的自然环境中,背景复杂,不可避免存在着光照和噪声等因素的影响,因此我们需要对得到的灰度图像进行预处理。
这里采用顶帽方法提高图像对比度,采用纳维滤波器滤除噪声。
根据对图像的纹理特征分析,我们知道车牌区域在垂直方向上具有非常丰富的边缘特征,因此我们利用 Prewitt 算子,进行图像垂直方向边缘检测。
为了使图像具有更好的连通特性,以便于后续分析,利用数学形态学方法,对边缘检测后的二值图像进行水平膨胀。
图2、图 4即为 fig1、 fig2边缘检测后在水平方向膨胀的结果,从图中可以看出车牌区域已经很明显显示出来,并且具有很好的连通特性。
图 1 fig1灰度图像图 2 fig1水平膨胀图像图 3 fig2灰度图像图 4 fig2水平膨胀图像2.2 连通区域分析与水平聚类图像预处理后,我们对其进行连通区域标记,求出每个连通区域的高度,利用高度阈值进行筛选,剔除过高和过低的干扰区域。
图 5、图 7就是 fig1、 fig2连通区域高度筛选后的图像, 从这幅图像中可以看出, 车牌区域已变成若干个连通区域,彼此之间在高度和空间位置上存在着相关性,因此我们利用这些相关性对这些连通区域水平聚类,把车牌重新组合起来。
设第 i 个连通区域有如下属性:水平方向最小值min iX , 水平方向最大值 max i X ,垂直方向最小值 min i Y ,垂直方向最大值 max i Y ,高度为 i H ,则定义如下相关性条件:(1水平相关性:min max i j X X x −≤∆或max min i j X X x −≤∆ (1 (2垂直相关性:i j mid mid Y Y y −≤∆ (其中 max min 1( 2i i i mid Y Y Y =+ (2 (3高度相关性:i j H H h −≤∆ (3上述公式中, x ∆、y ∆、h ∆分别表示水平相关性、垂直相关性、高度相关性的阈值。
如果两个连通区域满足上述相关性,则将两个连通区域合并,变成一个新的连通区域,继续聚类。
聚类结束后,利用车牌高度和宽度先验知识对聚类得到的连通区域再次筛选,就可以得到车牌的候选区域。
图 5 fig1连通区域分析图 6 fig1 水平聚类图 7 fig2连通区域分析图 8 fig2 水平聚类图 6、图 8即为 fig1、 fig2的聚类结果。
从图中我们可以看出,车牌区域已经非常好的聚合在一起。
图 6聚类后只有一个连通区域,所以它就是我们所要定位的车牌,其定位结果如图 9所示:图 9 fig1 定位结果图 10 fig2定位结果 2.3 模糊决策从图 8可以看出,经过连通区域水平聚类和高度、宽度筛选后,车牌区域可能不止一个,因此我们需要从候选车牌区域中,分析得到真正的车牌区域。
这里我们采用模糊决策的方法,设定以下模糊规则:(1区域宽高比:标准车牌的宽高比大约为 3,实际中由于倾斜等因素,可能有所变化,根据实验情况,我们设置其隶属度函数为:21124.51(3 0i i h h P ⎧≤≤⎪+−=⎨⎪⎩其它 (4 其中 i h 表示第 i 个候选区域的宽高比值, 1i P 则表示此模糊规则下第 i 个候选区域的隶属度。
(2区域字符密度:车牌的区域字符密度(即车牌区域内白色像素总和与整个区域面积的比值在一定范围内,根据实验情况,我们定义如下隶属函数:2210.3510.3511400(0.35 i i P ρρρ≤⎧⎪=⎨<≤⎪+−⎩(5 其中i ρ表示第 i 个候选区域的区域字符密度, 2i p 表示此模糊规则下第 i 个候选区域的隶属度。
(3车牌区域方差:在边缘检测后的图像中,由于车牌区域有一系列排列均匀的字符边缘,所以车牌区域方差较小,其表达式为:2, 11( *M N i j i i j X M N σ==−=∑∑ (6 其中i σ表示第 i 个候选车牌区域方差, M , N 分别表示区域高度和宽度, , i j X 表示区域像素值, 区域像素的均值,设图像有k 个车牌候选区域,则第 i 个候选区域的区域方差隶属度函数为:311( k kij i j j j P σσσ===−∑∑ (7 其中 3i P 表示此模糊规则下第 i 个候选区域的隶属度。
设以上三个评价因素的重要程度分别为α、β、δ,从实验中我们可以得出,三个评价因素的重要程度是:区域方差最重要,其次区域字符密度,再次宽高比,因此我们可设置α=0.25, β=0.35, δ=0.4。
进行模糊决策时,首先分别计算车牌候选区域三个评价因素的隶属度,然后利用下面融合公式计算融合后的该车牌候选区域的隶属度P 。
融合公式为:123i i i i P P P P αβδ=++ (8融合后隶属度最大值所对应车牌候选区域即为最佳车牌区域,也是我们定位的最终结果。
这种方法很好的解决了伪车牌问题。
图 8所示的两个候选区域经模糊融合后, 其结果如图 10所示, 融合结果完全正确。
3 车牌分割3.1 预处理首先把定位得到的车牌图像进行预处理,包括对比度增强,二值化,将车牌统一到黑底白字。
由于汽车牌照自动识别系统工作在复杂的光照环境下,经常会出现车牌光照不均的现象,所以二值化方法的选择对车牌识别率有很大影响。
本文首先使用同态滤波方法去除图像的不均匀光照的影响,然后使用改进的 Bernsen 算法对车牌图像进行二值化,这种方法有效的解决了光照不均和车牌模糊等因素影响,具有非常好的效果。