
用于多电机同步控制的角位移传感器设计
Design of rotate displacement sensor used to multi-drive synchronization system
奚小网1,陆 荣1,高 波2
XI Xiao-wang1, LU Rong1, GAO Bo2
(1. 无锡职业技术学院 机电技术学院,无锡 214121;2. 中国船舶科学研究中心,无锡 214082)
摘 要:本文介绍了一种可用于多电动机同步控制系统的角位移传感器。它采用导电塑料电位器为敏感元件,电位器滑动转轴与质量块固定,将传感器转角的变化转换成电阻的变化并通过测量转
换电路改变输出电压,输入变频器控制多电机同步运行。详细分析了传感器的结构、特点和
测量转换电路。实验表明输出电压与角位移变化呈线性关系。
关键词:角位移传感器;多电机同步,变频,运算放大器
中图分类号:TP274 文献标识码:A 文章编号:1009-0134(2011)8(上)-0045-04
Doi: 10.3969/j.issn.1009-0134.2011.8(上).13
0 引言
角度和角位移的测量在现代工业生产中广泛应用,主要采用电阻式、电感式、电容式、光栅式、磁阻式等角度和角位移传感器[1]。在多电机同步控制系统中角位移传感器也有应用,但传统的角位移测量仪,因结构等方面的缺陷,影响了其使用寿命和可靠性。利用导电塑料薄膜电位器作为敏感元件,设计了一种新型角位移传感器,用于多电机同步运行控制,具有无接触式、结构简单、小巧轻便、线性好、控制精度高等特点,既提高了控制的可靠性和分辨率,又简化了装配工艺,降低了成本。
1 多电机同步控制原理
在造纸、纺织印染、轧钢等生产设备中,由于具有多点传动的要求,电动机的数量通常较多,对系统的调速控制也提出了更高的要求。在调速方式上,由于变频调速具有可靠性高、使用维护方便等特点,因此这些设备一般采用变频器传动交流异步电动机的调速方式[2]。在工艺上,通常要求这些传动电动机之间能够实现同步运行(例如造纸、纺织印染设备)或按照一定的牵伸比(线速度比)运行(例如轧钢机、化纤后处理设备)。如常用的印染后整理设备有显色皂洗机、退煮漂联合机、热风烘燥机、丝光联合机等,这些设备的传动电机较多。工作时,布卷从设备进口进入,经过多电动机传动后,在出口处再次形成布卷。显然,为防止布匹在加工过程中跑偏、起皱并保证一定的张力,要求多个电动机保持同步运行,即实现多单元同步传动。
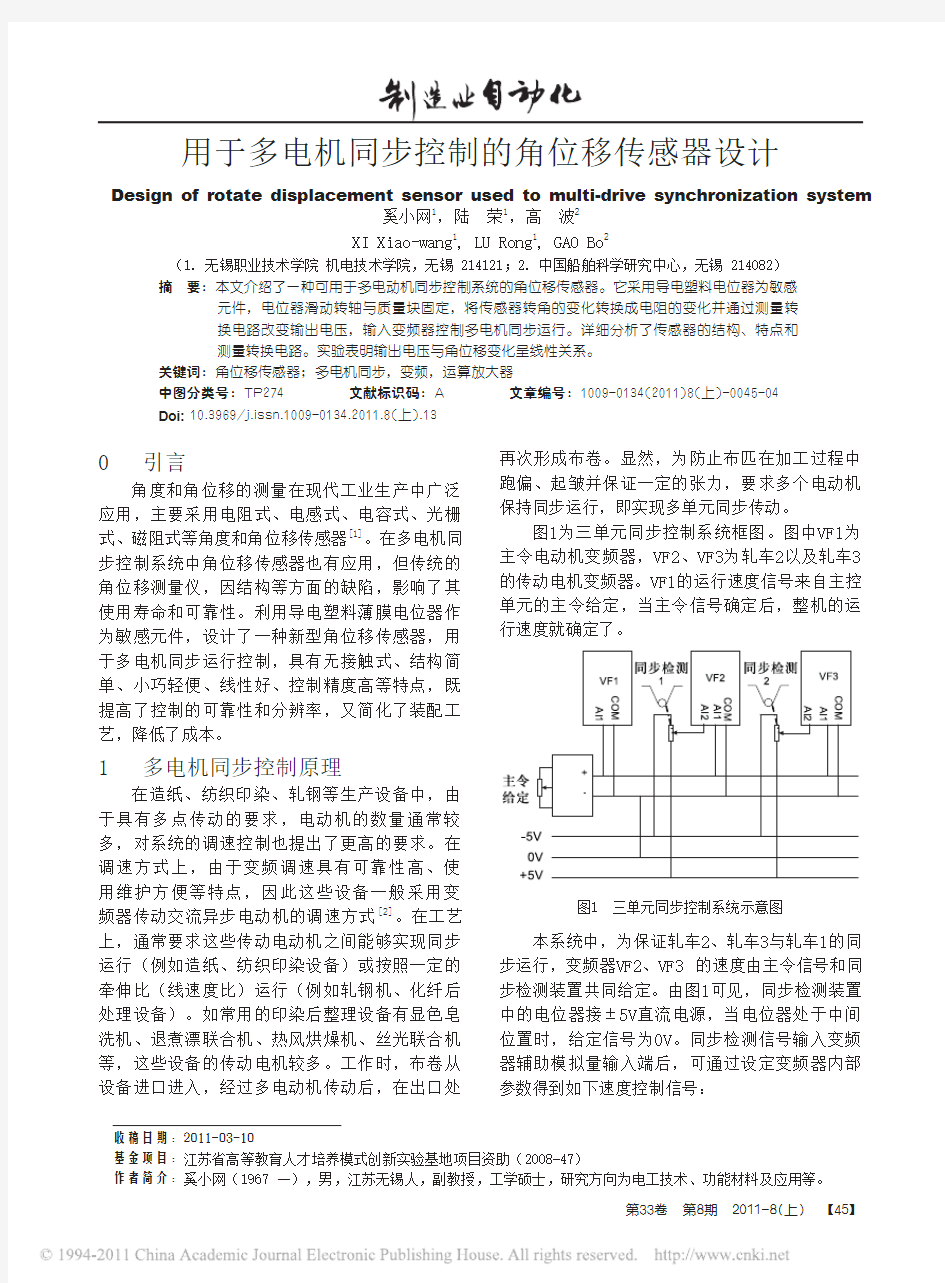
图1为三单元同步控制系统框图。图中VF1为主令电动机变频器,VF2、VF3为轧车2以及轧车3的传动电机变频器。VF1的运行速度信号来自主控单元的主令给定,当主令信号确定后,整机的运
行速度就确定了。
图1 三单元同步控制系统示意图
本系统中,为保证轧车2、轧车3与轧车1的同步运行,变频器VF2、VF3 的速度由主令信号和同步检测装置共同给定。由图1可见,同步检测装置中的电位器接±5V直流电源,当电位器处于中间位置时,给定信号为0V。同步检测信号输入变频器辅助模拟量输入端后,可通过设定变频器内部参数得到如下速度控制信号:
收稿日期:2011-03-10
基金项目:江苏省高等教育人才培养模式创新实验基地项目资助(2008-47)
作者简介:奚小网(1967 -),男,江苏无锡人,副教授,工学硕士,研究方向为电工技术、功能材料及应用等。
V F =k 1V A I 1+ k 2V A I 2 (1)式中,k 1、k 2取值范围为0~1。
运行中,当轧车2速度偏大时,同步检测电位器触点上移,变频器辅助输入端的信号为负,速度控制信号VF变小,使轧车2速度下降,最终实现与VF1同步,即实现多单元同步运行。
传统设备采用直流电机加变速箱传动,单元间采用摆式或棍式松紧架同步装置或自整角机调节电机的转速,或采用张力传感器构成恒张力控制系统,这些措施可靠性较差,控制操作管理与使用维护成本高。有人采用光电编码器或光栅等数字转速传感器和数字控制器实现的同步控制方案,也有用计算机和网络加开关量接口模块控制的同步方案,但这类方案又有因所需传感器或接口模块数量多,致使设备成本大大增加和对控制要求非常高的缺点[3]。采用交流变频调速取代直流调速,技术水平有了很大的提高,新型非接触式角位移传感器的使用,可有效提高长期可靠性和达到很高的分辨率。
2 新型角位移传感器设计
2.1 角位移传感器的结构
新型角位移传感器采用非接触式设计,其结构示意图如图2所示。敏感元件采用导电塑料电位器WDD35D-4。选择电位器标准阻值5kΩ、阻值公差±15%、独立线性精度±0.5%。电位器理论电气转角:345o±2o;分辨率:无限;功率:2W(70℃);电阻温度系数(ppm/℃):<±400;工作温度范围:-55℃~125℃;机械转角:360°(连续)。电位器固定于传感器外壳,电位器线圈随传感器外壳一起转动,其滑动转轴与质量块固定,在重力作用下保持竖直向下,因而可将传感器转角的变化转换成电阻的变化。
1. 电位器滑动转轴
2. 质量块
3. 固定盘
4. 导电塑料电位器
图2 传感器结构示意图
新型角位移传感器使用时直接安装在松紧架传感器安装轴端,如图3所示,这样可有效避免传感器承受的扭矩。安装轴检测浮动辊的位置变化,当右侧的电机运行速度相对变快时,浮动辊升高,角位移传感器检测的角度正向变大,当浮动辊升高到超出最高值的范围时,角位移传感器输出上越位信号。相反,当左边的电机运行速度相应变快时,浮动辊下降,角位移检测的角度反向变大,当浮动辊下降到超出最低值的范围时,
角位移传感器输出下限位信号。
图3 角位移传感器安装示意图
2.2 角位移传感器电路设计要求
工作类型:该角位移传感器可根据同步控制的要求,设定为标准型和同步型两种工作类型。标准型角位移传感器无同步控制功能,工作时变频器需外接同步器;同步型角位移传感器有专门的同步信号输入端,可独立实现同步控制。
测量范围及输出电压:根据实际应用的需求,该角位移传感器的出厂整定范围为±45°,标准型输出电压2.5~7.5V,同步型输出电压为同步信号±1V。
越位输出信号:传感器具有上限越位触点和下限越位触点,在正常工作范围内,上限越位触点和下限越位触点均闭合,上限越位时对应的上限越位触点断开,下限越位时则对应的下限越位触点断开。
同步型传感器的上下限位开关串联输出,作为一个开关使用。正常时,开关闭合;越位状态下,开关断开。
2.3 检测与转换电路组成
根据设计要求,新型角位移传感器完成信号检测与转换的电路由正常输出电路、上限位输出
电路、下限位输出电路以及电源电路四部分组成,敏感元件为导电塑料电位器R
W0
。其电路组成如图4所示。
电源电路:采用三端集成稳压器LM78L09以及LM79L09产生所需电压。三端集成稳压器的输出电流为100mA,可满足负载电路的使用要求。二极管D1和D2用于防止外部电源极性接反,D3和D4为集成稳压器的保护二极管。输入端接电容C1和C2用于消除串入电路的高频干扰;输出端接电容C3和C4可消除电路中的有害自激振荡,改善电源的瞬态响应。
正负动作信号输出电路:根据控制要求,当检测角度在±45°范围内变化时,标准型传感器应输出2.5~7.5V电压,同步型传感器输出同步电压±1V。在电路中首先通过反相输入放大电路A1将敏感元件输出电压进行放大,再通过反向器A8输出正动作信号;反相输入放大电路A1直接输出负动作信号。为满足同步控制要求,电路中增加反相加法电路将同步信号与检测信号叠加,同时增加反相放大电路A6将经过A1放大后的检测信号进
行调整,以满足同步型传感器输出电压等于同步信号±1V的要求。
上限位输出电路:上限位输出电路由放大电路、迟滞比较电路以及光电耦合输出电路组成。放大电路由反相比例放大电路A1以及反相器A2构成,用于对输入电压进行放大。由A3等组成迟滞电压比较电路,避免上限越位输出电压在上限位置来回跳变。采用光电耦合电路作为输出电路可割断信号处理电路与输出电路之间电的联系,电路之间的信号通过光线传输,使前端与负载完全隔离,增加安全性,减小电路干扰,简化电路设计。当U
11
TH 时,即输入未达上限位时,光电耦合器发光二极管发光,光敏晶体管导通,晶体管T1导通,端子10与端子11接通,相当于开关闭 合;当U 11 >U TH 时,即输入超过上限位时,光电耦合器截止,晶体管T1截止,端子10与端子11断开,相当于开关断开。 下限位输出电路:根据控制要求,当传感器图4 角位移传感器检测与转换电路 转角达到基准位置-45°时产生下限越位信号。当电位器R W0滑动触点向下滑动时,经过反相放大电路A1放大后输出电压U O1与迟滞电压比较电路相应的阈值电压U F2比较:当U O1大于U F2时,输出电压为低电平,下限越位指示发光二极管发光指示越位输出,光电耦合器件截止,晶体管T2截止,端子12与端子13断开,相当于开关断开;当U O1小于U F2时,输出电压U 22为高电平,光电耦合器件导通,晶体管T2导通,端子12与端子13导通,相当于开关闭合。 2.4 实验结果 调试后,取电位器R W0滑动触点位置设定为27%时对应浮动辊的基准位置,即敏感元件+90o位置。在45o~135o范围内进行了测量,得到正动作输出电压在2.46V到7.47V之间变化,其与被测角位移之间成线性关系,如图5所示。 3 结束语 运用导电塑料电位器及其滑动转轴与质量块固定的结构制成的新型传感器,固定于传动辊上,电位器线圈随传感器外壳一起转动,将传感器转角的变化转换成电阻的变化而改变输出电压,通过变频器使多电机同步运行。该传感器具 有无接触式、结构简单、小巧轻便、线性好、控制精度高等特点。参考文献: [1] 梁长垠,晏凯.基于单片机的电容式角位移测量系统[J].传 感器与微系统,2006,25(8):52-54. [2] 黄麟.交流调速系统及应用[M].大连理工大学出版社,2009: 181-183. [3] 潘湘高,李晓峰.纺织印染机械多电机群变频调速同步 DCS[J].纺织学报,2007,28(4):116-120. 图5 输出电压与角位移的关系曲线 传统的扰动观察法和电导增量法,采用模糊神经网络法光伏系统MPPT控制方法表现出更好的动态 性能和稳态性能。 图9 光照强度发生改变时实验波形图 5 结束语 论文分析了利用Boost电路实现光伏发电系统MPPT的原理,提出控制思路。重点讨论了基于模糊控制的MPPT算法,关键技术是借助人工神经网 络法,由实测数据生成模糊控制规则。仿真和实验显示采用该方法能够找到光伏发电系统最大功率点,并且当环境发生变化时能够快速响应,表现出较好的动态性能和稳态性能。参考文献: [1] 石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清 华大学出版社,2008. [2] 王 南.基于太阳能发电技术的交通警示照明系统的研 究:[D].西安:西安理工大学,2007. [3] 乔兴宏,吴必军,邓赞高,游亚戈.模糊/PID双模控制在光 伏发电MPPT中应用[J]. 电力自动化设备,2008,28(10):92-95. [4] Chung-Yuen Won,Duk-Heon Kim,Sei-Chan Kim.A new maximum power point tracker of photovoltaic arrays using fuzzy controller[J].IEEE Trans Ind Electron,2004,(3):396-403. [5] 李维波.MATLAB在电气工程中的应用[M].北京:中国电 力出版社,2007. 【上接第44页】 用于多电机同步控制的角位移传感器设计 Design of rotate displacement sensor used to multi-drive synchronization system 奚小网1,陆 荣1,高 波2 XI Xiao-wang1, LU Rong1, GAO Bo2 (1. 无锡职业技术学院 机电技术学院,无锡 214121;2. 中国船舶科学研究中心,无锡 214082) 摘 要:本文介绍了一种可用于多电动机同步控制系统的角位移传感器。它采用导电塑料电位器为敏感元件,电位器滑动转轴与质量块固定,将传感器转角的变化转换成电阻的变化并通过测量转 换电路改变输出电压,输入变频器控制多电机同步运行。详细分析了传感器的结构、特点和 测量转换电路。实验表明输出电压与角位移变化呈线性关系。 关键词:角位移传感器;多电机同步,变频,运算放大器 中图分类号:TP274 文献标识码:A 文章编号:1009-0134(2011)8(上)-0045-04 Doi: 10.3969/j.issn.1009-0134.2011.8(上).13 0 引言 角度和角位移的测量在现代工业生产中广泛应用,主要采用电阻式、电感式、电容式、光栅式、磁阻式等角度和角位移传感器[1]。在多电机同步控制系统中角位移传感器也有应用,但传统的角位移测量仪,因结构等方面的缺陷,影响了其使用寿命和可靠性。利用导电塑料薄膜电位器作为敏感元件,设计了一种新型角位移传感器,用于多电机同步运行控制,具有无接触式、结构简单、小巧轻便、线性好、控制精度高等特点,既提高了控制的可靠性和分辨率,又简化了装配工艺,降低了成本。 1 多电机同步控制原理 在造纸、纺织印染、轧钢等生产设备中,由于具有多点传动的要求,电动机的数量通常较多,对系统的调速控制也提出了更高的要求。在调速方式上,由于变频调速具有可靠性高、使用维护方便等特点,因此这些设备一般采用变频器传动交流异步电动机的调速方式[2]。在工艺上,通常要求这些传动电动机之间能够实现同步运行(例如造纸、纺织印染设备)或按照一定的牵伸比(线速度比)运行(例如轧钢机、化纤后处理设备)。如常用的印染后整理设备有显色皂洗机、退煮漂联合机、热风烘燥机、丝光联合机等,这些设备的传动电机较多。工作时,布卷从设备进口进入,经过多电动机传动后,在出口处再次形成布卷。显然,为防止布匹在加工过程中跑偏、起皱并保证一定的张力,要求多个电动机保持同步运行,即实现多单元同步传动。 图1为三单元同步控制系统框图。图中VF1为主令电动机变频器,VF2、VF3为轧车2以及轧车3的传动电机变频器。VF1的运行速度信号来自主控单元的主令给定,当主令信号确定后,整机的运 行速度就确定了。 图1 三单元同步控制系统示意图 本系统中,为保证轧车2、轧车3与轧车1的同步运行,变频器VF2、VF3 的速度由主令信号和同步检测装置共同给定。由图1可见,同步检测装置中的电位器接±5V直流电源,当电位器处于中间位置时,给定信号为0V。同步检测信号输入变频器辅助模拟量输入端后,可通过设定变频器内部参数得到如下速度控制信号: 收稿日期:2011-03-10 基金项目:江苏省高等教育人才培养模式创新实验基地项目资助(2008-47) 作者简介:奚小网(1967 -),男,江苏无锡人,副教授,工学硕士,研究方向为电工技术、功能材料及应用等。 传感器课程设计--电涡流位移传感器设计目录 摘要 电涡流位移传感器设计一、设计要求 二、总体设计方案 三、电涡流传感器的基本原理 3-1电涡流效应和传感器等效电路 3-2电涡流形成的范围 四、传感器的结构形式 五、测量电路及分析 5-1 测量电路 5-2 电路各单元分解 六、实验数据及误差分析 参考文献 摘要 随着现代测量、控制盒自动化技术的发展,传感器技术越来越受到人们的重视。特别是近年来,由于科学技术的发展及生态平衡的需要,传感器在各个领域的作用也日益显著。传感器技术的应用在许多个发达国家中,已经得到普遍重视。在工程中所要测量的参数大多数为非电量,促使人们用电测的方法来研究非电量,及研究用电测的方法测量非电量的仪器仪表,研究如何能正确和快速的非电量技术。电涡流传感器已成为目前电测技术中非常重要的检测手段,广泛的应用于工程测量和科学实验中。关键词:电涡流式传感器传感器技术电量非电量电涡流位移传感器设计一、设计技术要求 1、线性范围(mm):1 2、分辨率(um):1 3、线性误差:《3% 4、使用温度范围:-15~+80 二、总体方案设计 电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。它是一种非接触的线性化计量工具。电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点。根据下面的组成框图,构成传感器。 根据组成框图,具体说明各个组成部分的材料: (1)敏感元件:传感器探头线圈是通过与被测导体之间的相互作用,从而产生被测信号的部分,它是由多股漆包铜线绕制的一个扁平线圈固定在框架上构成,耗小,电性能好,热膨胀系数小。线圈框架的材料是聚四氟乙烯,其损 (2)传感元件: 前置器是一个能屏蔽外界干扰信号的金属盒子,测量电路完全装在前置器中,并用环氧树脂灌封。 (3)测量电路:本电路拟采用变频调幅式测量电路。 三、电涡流传感器的基本原理 3?1、电涡流效应和传感器等效电路 电涡流式传感器是利用电涡流效应,将位移、温度等非电量转化为阻抗的变化(或电感的变化,或Q值的变化)从而进行非电量电测的。 课程设计 设计名称: 电容式位移传感器的设计_ 专业班级: __ 姓名: ____________ 学号: _________ 指导教师: ______ xxxx年 xx 月 目录 一、设计要求……………………………………………………………… 3 二、电容传感器工作特性 (3) 三、电容传感器的优缺点 (3) 四、基本原理……………………………………………………………… 3 五、设计分析……………………………………………………………… 4 六、消除和减少寄生电容的影响 (5) 七、转换电路的设计 (6) 八、差动放大电路………………………………………………………… 8 九、相敏检波器系统工作及原理 (9) 十、心得体会 (11) 十一、参考文献 (12) 十二、附录 (13) 1、设计要求: 设计差动变面积式电容位移传感器,要求规定的设计参数。 1、测量范围(mm):0~±1mm; 2、线性度(%Fs):0.5; 3、分辨率(μm):0.01; 4、灵敏度(PF/mm): 5、通过理论设计、结构设计、理论分析等过程设计传感器结构和测量电路,画出结构示意图和测量电路图,并进行参数计算。利用参数和结构来选择合理的方法消除或减少寄生电容的干扰影响。结合传感器实验平台,确定传感器的静态灵敏度和线性范围,并设计电容传感器的电子秤应用实验。 2、电容传感器工作特性 电容式传感器具有灵敏度高、精度高等优点。相对与其他传感器来说,电容式传感器的温度稳定性好,其结构简单,易于制造,易于保证高的精度,能在高温、低温、强辐射及强磁场等各种恶劣环境条件下工作,适应性强;它的静电引力小,动态响应好,可用于测量高速变化的参数,如测量振动、瞬时压力等;它能够实现非接触测量,在被测件不能受力,或高速运动,或表面不连接,或表面不允许划伤等不允许采用接触测量的情况下,电容传感器可以完成测量任务;当采用非接触测量时,电容传感器具有平均效应,可以减少工件表面粗糙度等对测量的影响。因其所需的输入力和输入能量极小,因而可测极低的压力、很小的加速度、位移等,由于在空气等介质中损耗小,采用差动结构并连接成桥式电路时产生的零点残余电压极小,因此允许电路进行高倍率放大,使仪器具有很高的灵敏度,分辨力高,能敏感0.01μm至更小的位移。本课题采用差动变面积式电容位移传感器,线性的反映电容和位移的变化关系。 3、电容传感器的优缺点 电位器式位移传感器,位移传感器它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出。普通直线电位器和圆形电位器都可分别用作直线位移和角位移传感器。但是,为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。电位器式位移传感器的可动电刷与被测物体相连。 下面笔者来跟大家讲一下位移传感器的工作原理都有哪些 由于作为确定位置的活动磁环和敏感元件并无直接接触,位移传感器因此传感器可应用在极恶劣的工业环境中,不易受油渍、溶液、尘埃或其它污染的影响,IP防护等级在IP67以上。此外,传感器采用了高科技材料和先进的电子处理技术,因而它能应用在高温、高压和高振荡的环境中。传感器输出信号为绝对位移值,即使电源中断、重接,数据也不会丢失,更无须重新归零。由于敏感元件是非接触的,就算不断重复检测,也不会对传感器造成任何磨损,可以大大地提高检测的可靠性和使用寿命。 磁致伸缩位移传感器,是利用磁致伸缩原理、通过两个不同磁场相交产生一个应变脉冲信号来准确地测量位置的。测量元件是一根波导管,波导管内的敏感元件由特殊的磁致伸缩材料制成的。测量过程是由传感器的电子室内产生电流脉冲,该电流脉冲在波导管内传输,从而在波导管外产生一个圆周磁场,当该磁场和套在波导管上作为位置变化的活动磁环产生的磁场相交时,由于磁致伸缩的作 用,波导管内会产生一个应变机械波脉冲信号,这个应变机械波脉冲信号以固定的声音速度传输,并很快被电子室所检测到。 磁致伸缩位移传感器是根据磁致伸缩原理制造的高精度、长行程绝对位置测量的位移传感器。它采用非接触的测量方式,由于测量用的活动磁环和传感器自身并无直接接触,不至于被摩擦、磨损,因而其使用寿命长、环境适应能力强,可靠性高,安全性好,便于系统自动化工作,即使在恶劣的工业环境下,也能正常工作。此外,它还能承受高温、高压和强振动,现已被广泛应用于机械位移的测量、控制中。 杭州奥仕通自动化系统有限公司成立于2011年,是一家专业提供塑料机械行业自动化系统解决方案的高科技技术企业。公司为意大利杰佛伦(GEFRAN)和法国赛德(CELDUC)在中国大陆地区的核心代理商,主要产品有塑料机械控制器(PLC)、伺服驱动器、位移传感器、压力传感器、注射力和合模力传感器、高温熔体压力传感器、固态继电器(SSR)、温控表等。 多电机速度同步控制 在传统的传动系统中,要保证多个执行元件间速度的一定关系,其中包括保证其间的速度同步或具有一定的速比,常采用机械传动刚性联接装置来实现。但有时若多个执行元件间的机械传动装置较大,执行元件间的距离较远时,就只得考虑采用独立控制的非刚性联接传动方法。下面以两个例子分别介绍利用PLC和变频器实现两个电机间速度同步和保持速度间一定速比的控制方法。 薄膜吹塑及印刷机组的主要功能是,利用挤出吹塑的方法进行塑料薄膜的加工,然后经过凹版印刷机实现对薄膜的印刷,印刷工艺根据要求不同可以采用单面单色、单面多色、双面单色或双面多色等方法。在整个机组中,有多个电机的速度需要进行控制,如挤出主驱动电机、薄膜拉伸牵引电机、印刷电机以及成品卷绕电机等。电机间的速度有一定的关系,如:挤出主电机的速度由生产量要求确定,但该速度确定之后,根据薄膜厚度,相应的牵引速度也就确定,因此挤出速度和牵引速度之间有一确定的关系;同时,多组印刷胶辘必须保证同步,印刷电机和牵引电机速度也必须保持同步,否则,将影响薄膜的质量、印刷效果以及生产的连续性;卷绕电机的速度受印刷速度的限制,作相应变化,以保证经过印刷的薄膜能以恒定的张力进行卷绕。 在上述机组的传动系统中,多组印刷胶辘的同步驱动可利用刚性的机械轴联接,整个印刷胶辘的驱动由一台电机驱动,这样就保证了它们之间的同步。印刷电机的速度必须保证与牵引电机的速度同步,否则,在此两道工艺之间薄膜会出现过紧或过松的现象,影响印刷质量和生产的连续性。但是印刷生置与牵引装置相距甚远,无法采用机械刚性联接的方法。为实现牵引与印刷间的同步控制,牵引电机和印刷电机各采用变频器进行调速,再用PLC对两台变频器直接控制。 牵引电机和印刷电机采用变频调速,其控制框图如图1所示。在这个闭环控制中,以牵引辘的速度为目标,由印刷电机变频器调节印刷辘速度来跟踪牵引辘的速度。利用旋转编码器1和旋转编码器2分别采集上述两个电机的脉冲信号(编码器位置参见图3),并送到PLC的高速计数口或接在CPU的IR00000~IR00003。以这两个速度信号数据为输入量,进行比例积分(PI)控制算法,运算结果作为输出信号送PLC的模拟量模块,以控制印刷电机的变频器。这样,就可以保证印刷速度跟踪牵引速度的变化而发生变化,使两个速度保持同步。 目录 摘要 (2) 1绪论 (3) 引言 (3) 电容式液位测量技术的发展 (4) 电容式液位测量现状 (4) 电容式液位测量存在的问题 (5) 电容式液位传感器的发展趋势 (5) 2本设计的电容式液位测量方法 (6) 测量原理及实现思路 (6) 液体的物理参数对液位测量的影响 (8) 极板设计 (9) 液位测量系统的基本构成 (11) 3硬件设计 (12) 电源电路设计 (12) 电容测量电路设计 (13) 放大调零电路设计 (14) A/D转换电路设计 (16) 4误差分析 (17) 电容测量误差对精度的影响 (17) 影响液位测量的主要因素 (18) 5总结 (19) 参考文献 (20) 摘要 在工业自动化生产过程中,为了实现安全快速有效优质的生产,经常需要对液位进行精确测量,继而进行自动调节、智能控制使生产结果更趋完善。 通常进行液位测量的方法有二十多种,分为直接法和间接法。直接液位测量法是以直观的方法检测液位的变化情况,如玻璃管或玻璃板法。然而随着工业自动化规模的不断扩大,因其方法原始、就地指示、精度低等逐渐被间接测量方法取代。目前国内外工业生产中普遍采用间接的液位测量方法,如浮子式、液压式、电容法、超声波法、磁致伸缩式、光纤等。其中电容式液位测量价格低廉、结构简单,是间接测量方法中最常用的方法之一。 本设计采用一种与介质无关的电容式液位测量方法,解决了传统电容测量与被测介质有关的技术难题。它可以应用于动态液位测量,尤其是在被测液体本身介质常数和液位,随时间和环境等因素容易发生变化的场合,如车用燃油油位的计量,从而向当今高精度、数字化、集成化、智能化的科学技术全面发展更迈进了一步,对满足石油化工等液位检测领域的迫切需求具有重大的理论和应用价值,前景十分广阔。 消除电容式液位测量方法中介质介电常数的因素是关键,设计符合测量方法的电容极板,通过电容电压转换电路处理为直流电压信号,由数据采集卡采集后送入单片机或计算机,最终实现算法的设计。其中电容极板设计时需注意消除和减小边缘效应和寄生电容的影响,同时要保证平板电容良好的绝缘性能和抗外界干扰性。 最后在整体设计和理论分析的基础之上,从硬件各部分进行具体的设计,包括硬件电路和各环节的信号量匹配等。通过理论计算和数据分析,验证了此液位仪具有良好的性能,达到了要求的技术指标,同时指出了需要改进和完善的地方。 1绪论 题目:位移传感器的设计设计人员: 学号: 班级: 指导老师:许晓平、高宏才、陈焰日期: 位移传感器—光栅的原理和应用 一、概述 位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用(1)。 二、原理 计量光栅是利用光栅的莫尔条纹现象来测量位移的。“莫尔”原出于法文Moire,意思是水波纹。几百年前法国丝绸工人发现,当两层薄丝绸叠在一起时,将产生水波纹状花样;如果薄绸子相对运动,则花样也跟着移动,这种奇怪的花纹就是莫尔条纹。一般来说,只要是有一定周期的曲线簇重叠起来,便会产生莫尔条纹。计量光栅在实际应用上有透射光栅和反射光栅两种;按其作用原理又可分为幅射光栅和相位光栅;按其用途可分为直线光栅和圆光栅。下面以透射光栅为例加以讨论。透射光栅尺上均匀地刻有平行的刻线即栅线,a为刻线宽,b 为两刻线之间缝宽,W=a+b称为光栅栅距。目前国内常用的光栅每毫米刻成10、25、 50、100、250条等线条。光栅的横向莫尔条纹测位移,需要两块光栅。一块光栅称为主光栅,它的大小与测量范围相一致;另一块是很小的一块,称为指示光栅。为了测量位移,必须在主光栅侧加光源,在指示光栅侧加光电接收元件。当主光栅和指示光栅相对移动时,由于光栅的遮光作用而使莫尔条纹移动,固定在指示光栅侧的光电元件,将光强变化转换成电信号。由于光源的大小有限及光栅的衍射作用,使得信号为脉动信号。如图1,此信号是一直流信号和近视正弦的周期信号的叠加,周期信号是位移x的函数。每当x变化一个光栅栅距W,信号就变化一个周期,信号由b点变化到b’点。由于bb’=W,故b’点的状态与b点状态完全一样,只是在相位上增加了2π(2)。由图1可得光电信号为 u0=U平均+Umsin(π/2+2πX/W) 式中u0—光电元件输出的电压信号; 东北石油大学 课程设计 2015年7 月 8日 任务书 课程传感器课程设计 题目电感式位移传感器应用电路设计 专业测控技术与仪器姓名祖景瑞学号 主要内容: 本设计要完成电感式位移传感器应用电路的设计,通过学习和掌握电感式传感器的原理、工作方式及应用来设计一个电路。电路要能够检测一定范围内位移的测量,并且能够通过LED进行数字显示。位移传感器又称为线性传感器,常用的有电感式位移传感器,电容式位移传感器,光电式位移传感器,超声波式位移传感器,霍尔式位移传感器等技术。 基本要求: 1、能够检测 0~20cm 的位移; 2、电压输出为 1~5V; 3、电流输出为 4~20mA; 主要参考资料: [1] 贾伯年,俞朴.传感器技术[M].南京:东南大学出版社,2006:68-69. [2]王煜东. 传感器及应用[M].北京:机械工业出版社,2005:5-9. [3] 唐文彦.传感器[M].北京:机械工业出版社,2007: 48-50. [4] 谢志萍.传感器与检测技术[M].北京:高等教育出版社,2002:80-90.完成期限— 指导教师 专业负责人 2015年 7 月 1 日 摘要 测量位移的方法很多,现已形成多种位移传感器,而且有向小型化、数字化、智能化方向发展的趋势。位移传感器又称为线性传感器,常用的有电感式位移传感器,电容式位移传感器,光电式位移传感器,超声波式位移传感器,霍尔式位移传感器,磁致伸缩位移传感器以及基于光学的干涉测量法,光外差法,电镜法,激光三角测量法和光谱共焦位移传感器等技术。电感式位移传感器具有无滑动触点,工作时不受灰尘等非金属因素的影响,并且低功耗,长寿命,可使用在各种恶劣条件下。电感式位移传感器主要应用在自动化装备生产线对模拟量的智能控制方面。针对目前电感式位移传感器的应用现状,本文提出了一种电感式位移传感器的设计方法,具有控制及数据处理等功能,结构简单、成本低等优点,可以广泛应用于机械位移的测量与控制。 关键词:电感式传感器;自感式传感器;测量位移;位移传感器 同步电机的控制原理 一、控制原理 主机结构,包括定子、转子以及控制系统。 定子和异步电机完全相同。转子和线绕异步电机转子相同,有三个线圈,其中两个是励磁绕组,一个是阻尼绕组。励磁绕组通直流电,形成和定子对应的转子磁极,转子磁极在定子旋转磁场的作用下旋转,和定子保持同步。阻尼绕组的作用是防止已进入同步运转的电机失步。 启动状态下,转子的三个绕组起异步启动作用,产生感应电流,使电机逐步升速,直到接近于投磁前的亚同步状态。电机被拉入同步以前,两个励磁绕组经凸轮控制器串联,阻尼绕组经线路转换开关自成回路,这时通入直流电,把异步运转的电机强行拉入同步。 同步运转状态下,阻尼绕组和旋转磁场之间没有相对运动,不产生电流;失步状态下,阻尼绕组和旋转磁场之间有相对运动,产生电流和电动力,电动力的方向刚好和电机失步的方向相反,因此能起到阻止电机失步的作用。 控制系统包括一次系统控制回路和二次系统控制回路两部分。 一次系统控制回路主要是一台六氟化硫开关和一系列保护。有差动保护,过流保护,低电压保护,接地方向保护。 差动保护针对的是定子内部的短路或接地,定子内部短路或接地时,差动保护动作。过流保护主要保护电机的过载,在过载情况下动作。低电压保护在电网出现较长时间低电压情况下动作。接地方向保护在6kV单相完全接地或不完全接地情况下动作。各种保护动作,在切断主回路的同时,也切断直流回路。 二次回路包括励磁控制和启动回路。励磁控制是一套可控硅系统,功能和直流电机控制系统类似而较为简单,没有那么多反馈控制环,只有一个电流反馈控制环; 另外有联锁回路和失步、失磁、过激保护回路。励磁投入必须具备一定条件,如各种保护都没有动作,慢动电机处于脱开的位置,电机启动已进入亚同步状态的信号已送出,等。根据这些条件来准备控制可控硅的投入时间就是连锁,相应的回路称为连锁回路。 相对于一次回路的保护而言,失步、失磁和过激保护属于二次回路的保护。失步保护保护电动的失步。电机失步的破坏性很大,形成的异步力量能剪切转子线圈,所以这个保护功能必须可靠,否则一旦发生失步,后果很严重。该回路检测定子电流、电压。 众所周知,电机运行在功率因数超前状态,定子电流比定子电压滞后;运行在功率因数滞后状态,定子电流比定子电压超前。不论超前还是滞后,6kV回路的电流波和电压波之间都没有相对运动。如果电机失步,电机的电流波和电压波之间立即产生来来回回的相对运动,失步检测回路即捕捉此电流波和电压波来回运动时重合的脉冲。重合一次证明失步一次,重合两次失步保护动作。 失磁是欠激的极限状态,不清楚为什么有失磁保护而没有欠激保护,请各位探讨。失磁信号和过激信号的确定都通过比较放大器实现,比较放大器的给定可以调整。 二、启动过程 同步电机启动必须满足三个条件:1、继电器30C不激磁(过电流保护50/51未动作,接地方向继电器67G未动作,差动继电器87未动作,欠压继电器27未动作,故障继电器86X未动作,激磁变压器一次侧空气开关未跳,故障包括:失磁,失步,过激,启动限时,凸轮控制器及线路转换开关过载保护49AX,慢动电机总空气开关,慢动抱闸空气开关,慢动热保护49I,可控硅风机开关,及其热保护49FX, 多台电机同步调速器的应用 (TB-4同步控制器使用说明书) 同步控制是工业控制中常见的控制方式,传统的机械同步控制由于精度和可调性差而逐渐减少,我所开发的TB-4 同步控制器由于控制精度高,输出模拟量可选性多,能多台同步器并联使用, 等优点而在电线电缆, 皮革, 钢铁, 纺织, 造纸, 等一些需要电机同步同速和同步非同速控制的行业被大量应用。TB-4 同步控制器就其工作原理而言,实际上是一台具有4 路直流模拟量(电压或电流)控制信号输出的信号发生器。 技术参数; 自动控制输入:0-5VDC 。0-10V DC 手动控制:主调10K 电位器 模拟量输出四组电压型;0-5VDC . 1-5VDC. 0-10V . 2-10V 。 模拟量输出四组电压型:0-10ma. 0-20ma .2-10ma.4-20ma 软启动时间调节:0-60 秒 控制电机台数;4-48 台 可接口调速器:力矩电机控制器,直流电机调速器,变频器,电磁电机调速器,等可调速电机控制器。 外型尺寸 原理示意图 同步器的技术及其特点 TB-4 同步器,内部采用MAXI 公司的是最新12 位D/A ,A/D 转换电路,他能通过主调电位器同时输出 4 组电压量或电流量信号,这四组信号可通过4 个多圈微调电位器,在原有主调电位器调节输出的(电压或电流)基础上增加或衰减,以达到多台电机的同步同速和同步非同速控制。 软启动曲线图 该控制器具有输出模拟量(电压或电流)随时间线性上升功能,调节机器内部电位器W1 可使上升时间,0-60秒线性调节(图 1 ) 注:V/I 输出电压和电流,ms 启动时间 应用举例: 导电塑料位移传感器使用时一般按分压器原理以电压输出或转换电流输出(4~20ma)与轴旋转角度或直线位移成高精度的线性关系。其特点是高精度、高寿命、高平滑性、高分辨率。可用作位置反馈、位置检测、电平调节等。通常用于工业自动化、精密仪器仪表、电动执行器、纺织、注塑、数控的机床设备、医疗器械、汽车、火车、飞机、军舰、导弹等领域中的自动控制系统、伺服系统、信息反馈系统。 传感器结构主要是由电阻元件、轴、电刷、壳体、盖等组成,另加位移变送器或数字显示器。旋转式传感器有单联、双联二种,它们安装形式相同,分为螺母固定(如wdj27—1型)、螺钉固定(如wdj36—1型)和压板固定(wdj36—4型)三种,电信号引出一般采用接线柱形式。直滑式传感器的安装形式一般采用螺钉固定,电信号引出有三种形式:接线桩式(如:wdm14系列)、插座式(如cfy电子尺系列)和导线式(如cwy系列)。 三个接线柱或红、黄、蓝三根线对应标牌标记1、2、3分别表示:1是输入端;2是输出端;3是接地。(请注意:如果引出端2接错线会烧坏传感器)轴从1端到3端角度旋转或直线位移时阻值发生变化,由2端按线性规律高精度输出,同时通过变换电路将阻值变化转换为信号显示。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解相关传感器产品的选型,报价,采购,参数,图片,批发等信息,请关注艾驰商城https://www.doczj.com/doc/027008678.html,。 用数据库是十分必要的。 S Q L数据库在数据存储和分析上已经具备相当完备的功能,对数据进行管理最好的方法就是使用数据库,今后数据库在数据存储方面也将起更大作用,其运用也会更广泛。 2 结语 基于以上的介绍,现在对三种数据存储方式的适用范围作一个简单的归纳: 1)运用V B中控件M S F l e x G r i d的存储方式。在存储数据数量较少时,其操作方便快捷、显示简单明了,故常运用于一些要求不高的场合,且运用广泛。 2)运用V B操作E x c e l的存储方式。E x c e l表格能存储和分析产品各项参数,由V B A程序可以实现对不合格量的数据统计,查看产品质量的合格率,从而提高工作效率。E x c e l表格以其操作简捷方便,涉及内容全面,有着广泛的运用。 3)运用V B操作S Q L数据库的存储方式,这是目前最完备的数据存储手段之一。S Q L数据库具有良好的查询和更新方法,能实现多重备份和受损修复,也更有安全性,同时它具有海量的存储能力,比较适合参数数量庞大的存储数据,真正实现多而不乱,查而不烦。◆ 参考文献 [1]宋广群,姚成.V B程序设计[M].中国科学技术大学出版社, 2006. [2]李政,梁海英,李昊.V A B应用基础与实例教程[M].国防工 业出版社,2005. [3]李丹,赵占坤等.S Q LS e r v e r2000数据库管理与开发实用教 程[M].机械工业出版社,2005. [4]王洪香.利用V B6.0存储和显示S O LS e r v e r数据库中的图像 数据[J].办公自动化,2006,(9):27-29. [5]A n d m x ST a n e n b a u m.计算机网络(第3版)[M].北京:清华 大学出版社,2000. 作者简介:吴军(1983-),男,合肥工业大学仪器科学与光电工程学院在读研究生,研究方向为测试计量技术及仪器。 收稿日期:2008-06-18(8314) 文章编号:1671-1041(2009)01-0021-03 基于模糊P I D控制的多电机同步控制研究 万鹏飞,王 莉 (中南大学信息科学与工程学院,湖南长沙410075) 摘要:本文介绍了几种常用的同步控制策略并对比其控制性能,选取基于补偿原理的同步方式做为研究对象,采用模糊控制与传统P I D控制相结合的方法设计补偿器。仿真实验结果表明,这种方案鲁棒性、快速性优良、动态过程同步误差小,能够较好地满足被控对象对高精度同步控制的要求。 关键字:模糊控制;P I D控制;同步控制;补偿原理 中图分类号:T P271+.4 文献标识码:A T h e r e s e a r c ho f m u l t i-m o t o r s y n c h r o n i z a t i o n c o n t r o l b a s e do nf u z z y-P I Dc o n t r o l WA N P e n g-f e i,WA N G L i (S c h o o l o f I n f o r ma t i o nS c i e n c e a n dE n g i n e e r i n g, C e n t r a l S o u t hU n i v e r s i t y,C h a n g s h a410075,C h i n a) A b s t r a c t:I nt h i s p a p e r,s o m ek i n d ss y n c h r o n i z a t i o nc o n t r o l m e t h o d s w i l l b ei n t r o d u c e da n dc o m p a r e db y t h ec o n t r o l p r o p e r t i e s.T h eme t h-o db a s e dc o m p e n s a t i o np r i n c i p l ew i l l b es e l e c t e d a s t h er e s e a r c ho b-j e c t.Me a n w h i l e,F u z z yP I Dc o n t r o l m e t h o di sp r o p o s e dt od e s i g n t h e c o mp e n s a t i o nd e v i c e.T h e s i mu l a t i o n r e s u l t si n d i c a t et h a t t h ep r o-p o s e dm e t h o dh a ss t o n gn o i s ei m mu n i t ya n dr o b u s t n e s sa n dt h er a-p i d i t yi sg o o da n dd y n a m i c a l s y n c h r o n o u s e r r o r i s l o w.S ot h i s c o n t r o l me t h o dc a n s a t i s f yt h ed e m a n d s o f t h e c o n t r o l l e ds u b j e c t f o r t h eh i g h p r e c i s i o na p p l i c a t i o s. K e y w o r d s:f u z z yc o n t r o l;P I D c o n t r o l;s y n c h r o n i z a t i o nc o n t r o l;c o m-p e n s a t i o np r i n c i p l e 0 引言 由于近代电力电子技术、微电子、控制理论、计算机技术以及传感器技术的发展,均为交流传动控制提供了广阔的前景,为设计出高精度、快速响应的交流传动系统奠定了基础,同时也使多电机协调控制研究成为可能。一般来说,同步关系是各受控量应满足某种线性或非线性的函数关系[1]: f(y 1 ,y 2 ,…,y n )=c 常用的比例关系: u 1 y 1 =u 2 y 2 =…=u n y n 当比例系数u i =1时,也即为最简单的同步关系。在这种传动系统中,目前存在的同步控制技术包括等状态控制、主从控制等[2]。许多科学工作者把鲁棒控制,变结构控制,模型参考自适应控制,神经网络与遗传算法等现代控制理论的控制方法应用到多电机协调控制中,取得了很好的效果。 1 多电机同步控制策略 1.1 主从控制 这种控制结构以前一台电机的转速输出作为下一台的速度给定,电机之间的速度同步比例关系由同步系数决定[3]。在这种控制下负载或者速度参考指令的变化都会对从轴产生影响,但是从轴的负载扰动和转速的变化对主轴不会产生影响,从而在启动停止和负载扰动的情况下造成较大的同步误差; 1.2 等状态控制 目前多电机的同步控制多采用等状态控制结构。各轴的控制器采用同一给定的速度参考指令。各轴之间的速度协调关系由同步系数决定。这种控制结构线路简单,容易实现,且着重系统跟踪性能,启动时不存在滞后问题,跟随性能好。文献[4]在等状态基础上提出了交叉耦合控制策略,将两轴的同步误差通过耦合系数K1,K2分别引入到两轴的控制器中,对同步误差进行补偿,控制结构图如图1所示。这在一定程度上改善了同步性能。但是,由于耦合系数选择的好坏对同步性能的影响至关重要,而在工程中,很难将耦合系数调整到最佳值。若耦合系数过小,则难以消除同步误差;若耦合系数过大,虽然可以有效地减小同步误差,但却会造成振荡现象。 仪器仪表用户◆研究报告◆ 欢迎订阅欢迎撰稿欢迎发布产品广告信息 21 位移传感器又称为线性传感器,是一种属于金属感应的线性器件,传感器的作用是把各种被测物理量转换为电量。在生产过程中,位移的测量一般分为测量实物尺寸和机械位移两种。按被测变量变换的形式不同,位移传感器可分为模拟式和数字式两种。模拟式又可分为物性型和结构型两种。 位移传感器的主要分类 根据运动方式 直线位移传感器: 直线位移传感器的功能在于把直线机械位移量转换成电信号。 为了达到这一效果,通常将可变电阻滑轨定置在传感器的固定部位,通过滑片在滑轨上的位移来测量不同的阻值。传感器滑轨连接稳态直流电压,允许流过微安培的小电流,滑片和始端之间的电压,与滑片移动的长度成正比。将传感器用作分压器可最大限度降低对滑轨总阻值精确性的要求,因为由温度变化引起的阻值变化不会影响到测量结果。 角度位移传感器: 角度位移传感器应用于障碍处理:使用角度传感器来控制你的轮子可以间接的发现障碍物。原理非常简单:如果马达角度传感器构造运转,而齿轮不转,说明你的机器已经被障碍物给挡住了。此技术使用起来非常简单,而且非常有效;唯一要求就是运动的轮子不能在地 板上打滑(或者说打滑次数太多),否则你将无法检测到障碍物。一个空转的齿轮连接到马达上就可以避免这个问题,这个轮子不是由马达驱动而是通过装置的运动带动它:在驱动轮旋转的过程中,如果惰轮停止了,说明你碰到障碍物了。 根据材质 电位器式位移传感器:它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出。普通直线电位器和圆形电位器都可分别用作直线位移和角位移传感器。但是,为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。图1中的电位器式位移传感器的可动电刷与被测物体相连。物体的位移引起电位器移动端的电阻变化。阻值的变化量反映了位移的量值,阻值的增加还是减小则表明了位移的方向。通常在电位器上通以电源电压,以把电阻变化转换为电压输出。线绕式电位器由于其电刷移动时电阻以匝电阻为阶梯而变化,其输出特性亦呈阶梯形。如果这种位移传感器在伺服系统中用作位移反馈元件,则过大的阶跃电压会引起系统振荡。因此在电位器的制作中应尽量减小每匝的电阻值。电位器式传感器的另一个主要缺点是易磨损。它的优点是:结构简单,输出信号大,使用方便,价格低廉。 霍耳式位移传感器:它的测量原理是保持霍耳元件(见半导体磁敏元件)的激励电流不变,并使其在一个梯度均匀的磁场中移动,则所移动的位移正比于输出的霍耳电势。磁场梯度越大,灵敏度越高; 角度位移传感器原理及其应用实例 时间:2012-02-08 17:10:54 来源:作者: 角度位移传感器是利用角度变化来定位物体位置的电子元件。适用于汽车,工程机械,宇宙装置、导弹、飞机雷达天线的伺服系统以及注塑机,木工机械,印刷机,电子尺,机器人,工程监测,电脑控制运动器械等需要精确测量位移的场合。本文介绍角度位移传感器原理及其应用实例。 角度位移传感器原理 角度传感器用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到RCX 上时,轴每转过1/16圈,角度传感器就会计数一次。往一个方向转动时,计数增加,转动方向改变时,计数减少。计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。 角度位移传感器实例 如果把角度传感器连接到马达和轮子之间的任何一根传动轴上,必须将正确的传动比算入所读的数据。举一个有关计算的例子。在你的机器人身上,马达以3:1的传动比与主轮连接。角度传感器直接连接在马达上。所以它与主动轮的传动比也是3:1。也就是说,角度传感器转三周,主动轮转一周。角度传感器每旋转一周计16个单位,所以16*3=48个增量相当于主动轮旋转一周。现在,我们需要知道齿轮的圆周来计算行进距离。幸运地是,每一个LEGO齿轮的轮胎上面都会标有自身的直径。我们选择了体积最大的有轴的轮子,直径是81.6CM(乐高使用的是公制单位),因此它的周长是81.6×π=81.6×3.14≈256.22CM。现在已知量都有了:齿轮的运行距离由48除角度所记录的增量然后再乘以256。我们总结一下。称R为角度传感器的分辨率(每旋转一周计数值),G是角度传感器和齿轮之间的传动比率。我们定义I为轮子旋转一周角度传感器的增量。即: I=G×R 在例子中,G为3,对于乐高角度传感器来说,R一直为16.因此,我们可以得到:I=3×16=48 每旋转一次,齿轮所经过的距离正是它的周长C,应用这个方程式,利用其直径,你可以得出这个结论。 C=D×π 在我们的例子中: 龙源期刊网 https://www.doczj.com/doc/027008678.html, 浅析两台异步电机的同步控制 作者:殷雄 来源:《科技资讯》2012年第02期 摘要:在两台异步电机(分别命名为1#,2#,下同)的控制中,以1#电机为基准,采用基 于PLC技术的变频控制,根据根据负载需要,不断改变1#电机的转速,为了达到两台异步电机的同步运行,以1#电机的转速为给定量,2#电机的转速为随动量,也采用基于PLC技术的闭环变频控制。从而实现两台异步电机的精确同步运行,也达到了节能之目的。 关键词:异步电机同步控制节能 中图分类号:TPO文献标识码:A文章编号:1672-3791(2012)01(b)-0134-01 随着国民经济的发展,生产过程中的机械化程度不断提高,而机械化程度的不断提高与电机特别是异步电机的广泛应用和精确控制是密不可分的。在海绵、塑料制品和钢铁行业生产过程中,对异步电机的同步控制要求十分高。例如:在海绵发泡过程中,必须保证两台电机转速的同步,如果2#电机的转速大于1#电机的转速,就会造成切断机刀架拉坏,如果2#电机的转速小于1#电机的转速就不能切断海绵。这两种情况在实际生产中是不允许的,因为这会造成 设备的损坏和产品的报废,从而造成经济损失,影响企业的效益。本文依据负载需要对两台电机采用闭环PLc变频控制,从而实现两台异步电机的转速同步控制,以满足工业生产的需要。 1基于PLC技术的1#电机转速变频控制的实现 先令1#电机以最低频率(35Hz)进行启动,当电机启动后,依据生产需要,不断改变电机转速的给定值,并将给定值输入PLC相应模块,与1#电机的相连的测速电机对1#电机进行测速,并将所测的速度值也输入PLC相应模块,让PLC进行判断。如果测速电机所测的速度大于给定速度时,那么PLC向1#电机的变频器发出无极降速的指令,从而让1#电机的变频器降低频率进而降低转速;如果测速电机所测的速度小于给定速度时,那么PLC向1#电机的变频器发出无极升速的指令,从而让1#电机的变频器提高频率进而升高转速。其PLC闭环控制原理图如图1所示,其PLC闭环控制流程图如图2所示。 论文题目:电机同步控制模块设计(软件) 专业:电气工程及其自动化 指导老师:黄梦涛(签名) 本科生:李大威(签名) 摘要 多电机同步控制广泛应用于工业生产中。论文以两台电机的同步为研究对象,采用主从式的控制结构,设计了一个两台小功率低电压直流电机的同步控制系统,两台直流电机采用PWM技术调速。为了提高控制精度,采用了带速度反馈的闭环调速系统,选用单片机C8051F040作为控制器。为了能够根据需要改变电机的转速以及实时显示两台电机的速度,我们还建立了单片机和上位机之间的串行通信。设计的核心是用C语言编程实现了PID控制算法。为了增加PID算法的自适应性,设计中整定了多组控制参数,并给出了控制结果。 关键词:多电机同步,PWM,C语言,PID算法 SUBJECT :The software design of Multi-electric motor’s synchronism control module Specialty:Electrical Engineering and Automation Instructor:Huang Mentao (Signature) Name :Li Dawei(Signature) ABSTRACT Multi-electric motor synchronism control system has been widely used in the industrial manufacture. Taking the synchronization of two engines as research object, a synchronous control system for two DC motors, which work on small power and low voltage, is designed in this paper. It has a Master-slave structure. The speeds of the two DC motors are regulated with the technology of PWM. In order to improve the control precision, a closed loop speed control system with a speed feedback is adopted, while the single chip computer C8051F040 is selected as the controller. We also establish a serial communication between the single chip computer and a PC, so it is easy to set up the motors’ speed you want and show the real-time speeds of them. The core of the design is to realize the PID algorithm, using the C language to program. In order to improve the PID algorithm’s adaptability, several group control parameters are set in the design, and their control effects are given. KEY WORDS:Multi-electric motor synchronism, PWM, C language, PID用于多电机同步控制的角位移传感器设计
传感器课程设计--电涡流位移传感器设计
电容式位移传感器的设计
位移传感器的工作原理都有哪些
多电机速度同步控制
液位传感器课程设计
位移传感器原理及应用课程设计[1]
传感器课程设计 电感式位移传感器
同步电机的控制原理
多台电机同步调速器的应用
角度位移传感器的结构及应用
基于模糊PID控制的多电机同步控制研究
位移传感器
角度位移传感器原理及其应用实例
浅析两台异步电机的同步控制
多电机同步控制Word版
相关主题
文本预览