TY-RTSIM-2013 半物理仿真平台简介 TY-RTSIM-2013是由苏州同元软控信息技术有限公司研发的半物理仿真平台,致力于为各领域产品开发提供由数字化设计至试验测试过程的一体化设计方法和工具,以及提供产品全模型实时仿真、快速原型设计和硬件在回路测试的解决方案。 全模型实时仿真 快速原型开发 硬件在回路测试
TY-RTSIM-2013支持用户基于Matlab/Simulink、MWorks、Dymola等图形化建模环境进行模型设计,实现了控制、液压、机械等多领域建模工具与实时仿真目标机的紧密集成,提供一个高易用性、高可靠性、高实时性的产品设计、仿真及测试验证平台。 TY-RTSIM-2013是具有自主知识产权、国内领先的半物理仿真平台产品,在航空、航天、兵器、船舶、车辆等领域具有广泛应用。 1.系统架构 TY-RTSIM-2013采用“主机-目标机”的系统架构,由建模软件、平台综合管理软件、三维视景软件、仿真目标机与信号板卡、分布式组件等构成。
2.系统主要功能/性能/特点 (1).支持多种建模环境,包括Matlab/Simulink、MWorks、Dymola等; (2).x86多核处理器,PCI系统总线,Linux/RTAI实时操作系统; (3).高实时性仿真,仿真周期≤1ms,具备任务优先级、线程、硬件中断等控制方式; (4).支持绝大多数主流厂商常规板卡和传感器板卡; (5).仿真机硬件系统开放性,支持用户自制板卡; (6).单/多模光纤反射内存方式数据通信,支持多节点的“星形”和“环形”分布式仿真架构; (7).软件易用性,主要体现于综合管理软件,包括: ●显示界面中,控件拖拽操作 ●拖放式操作实现变量与显示控件关联、板卡通道与显示控件关联 ●用户简单操作实现专用仿真程序界面开发 ●具备批量试验、特定工况试验操作 ●具备多组曲线数据自动输入等功能 ●物理数据与电信号数据比例关系控制功能 ●板卡电信号输出范围锁定设置 ●提供软件外部功能扩展接口 (8).半物理仿真数据同步驱动的场景动画; (9).兼用于信号测试系统。 3.主要技术参数 3.1建模软件 TY-RTSIM-2013支持的建模环境包括Matlab/Simulink、MWorks、Dymola 等。 此外,用于半物理仿真的建模软件还包括: ●SimRTI 信号板卡接口功能模块库,集成于Matlab/Simulink和MWorks软件环境中。
1半导体中的电子状态 1.2半导体中电子状态和能带 1.3半导体中电子的运动有效质量 1半导体中E与K的关系 2半导体中电子的平均速度 3半导体中电子的加速度 1.4半导体的导电机构空穴 1硅和锗的导带结构 对于硅,由公式讨论后可得: I.磁感应沿【1 1 1】方向,当改变B(磁感应强度)时,只能观察到一个吸收峰 II.磁感应沿【1 1 0】方向,有两个吸收峰 III.磁感应沿【1 0 0】方向,有两个吸收峰 IV磁感应沿任意方向时,有三个吸收峰 2硅和锗的价带结构 重空穴比轻空穴有较强的各向异性。 2半导体中杂质和缺陷能级 缺陷分为点缺陷,线缺陷,面缺陷(层错等 1.替位式杂质间隙式杂质
2.施主杂质:能级为E(D,被施主杂质束缚的电子的能量状态比导带底E(C低ΔE(D,施主能级位于离导带底近的禁带中。 3. 受主杂质:能级为E(A,被受主杂质束缚的电子的能量状态比价带E(V高ΔE(A,受主能级位于离价带顶近的禁带中。 4.杂质的补偿作用 5.深能级杂质: ⑴非3,5族杂质在硅,锗的禁带中产生的施主能级距离导带底较远,离价带顶也较远,称为深能级。 ⑵这些深能级杂质能产生多次电离。 6.点缺陷:弗仑克耳缺陷:间隙原子和空位成对出现。 肖特基缺陷:只在晶体内部形成空位而无间隙原子。 空位表现出受主作用,间隙原子表现出施主作用。 3半导体中载流子的分布统计 电子从价带跃迁到导带,称为本征激发。 一、状态密度 状态密度g(E是在能带中能量E附近每单位间隔内的量子态数。 首先要知道量子态,每个量子态智能容纳一个电子。 导带底附近单位能量间隔内的量子态数目,随电子的能量按抛物线关系增大,即电子能量越高,状态密度越大。 二、费米能级和载流子的统计分布
车辆综合半实物仿真平台解决方案 车辆综合电子电气系统涉及到电子、总线、控制、人机交互等多个领域,功能复杂,研制难度大,研制单位往往缺乏系统级的验证平台。本方案依托国内外先进的开发工具(Tesis、Altia)以及自主研发的软硬件系统(HiGale),采用基于模型的设计理念,构建了车辆综合半实物仿真实验室,能够高效的解决用户复杂的电子系统仿真和测试的问题。 平台技术挑战 为车辆综合电子系统提供半实物仿真验证环境,以适应不同型号不同研制周期的综合电子系统设计验证、功能验证及性能测试的需要。平台建设的主要挑战如下: ?完整实现虚拟车辆动力传动系统、控制系统、车辆电器及防护系统四大系统的实时模型?通过真实物理信号实现虚拟车辆系统与综电系统的信号交换 ?系统具备故障注入功能,实现综电系统的故障注入测试及诊断功能测试 ?实现系统的友好人机交互、自动测试以及虚拟车辆运动三维及乘员视景 ?实现车际通讯指挥控制的仿真测试 平台解决方案
车辆综合半实物仿真平台按功能可划分为仿真控制中心、虚拟车辆、信号适配及故障注入系统、人在环系统四大部分。 在以上四大系统开发建设中,包含了很多先进的工具、开发流程及恒润多年积累的核心技术,主要包括:高性能仿真机系统、定制的硬件系统、定制模型开发、先进的人机交互终端解决方案、三维视景软件、实验管理系统软件等。 ?仿真控制中心 仿真控制中心为半实物仿真平台的管理中心,负责提供人机交互界面、电源管理、系统管理及仿真过程管理,可将仿真数据生成三维实时动画软件,并通过显示设备给予实验人员真实被控系统运动情况显示。
?虚拟车辆 虚拟车辆为仿真平台的核心,提供基于实时仿真计算机系统的动力系统、武器系统、电器系统、防护系统、环境系统的实时模型,并连接各种真实电器设备,包括控制开关、电控单元及各类执行设备,为电子控制系统提供了闭环测试环境、各类负载及显示环境。 ?虚拟实时仿真系统 虚拟实时仿真系统采用了国外仿真机和恒润自主研发的实时仿真机HiGale。其中,HiGale实时仿真系统基于高实时性、高可靠性的操作系统,提供了兵器行业专用的板卡,同时能够实现自动化测试的功能。 ?实时车辆仿真模型 实时车辆仿真模型是整个半实物仿真系统的核心,依靠先进的建模方法和丰富的建模经验,搭建了装甲车辆模型、伺服电机系统模型、武器系统模型以及三防系统模型。 ?信号适配及故障注入系统 信号适配及故障注入设备是半实物仿真系统与测试环境间的接口,不但提供了各种输入/输出信号的调理、负载模拟功能,同时也提供了进行常见电气故障注入的功能以及用于系
(Multisim数电仿真)半加器和全加器
————————————————————————————————作者:————————————————————————————————日期:
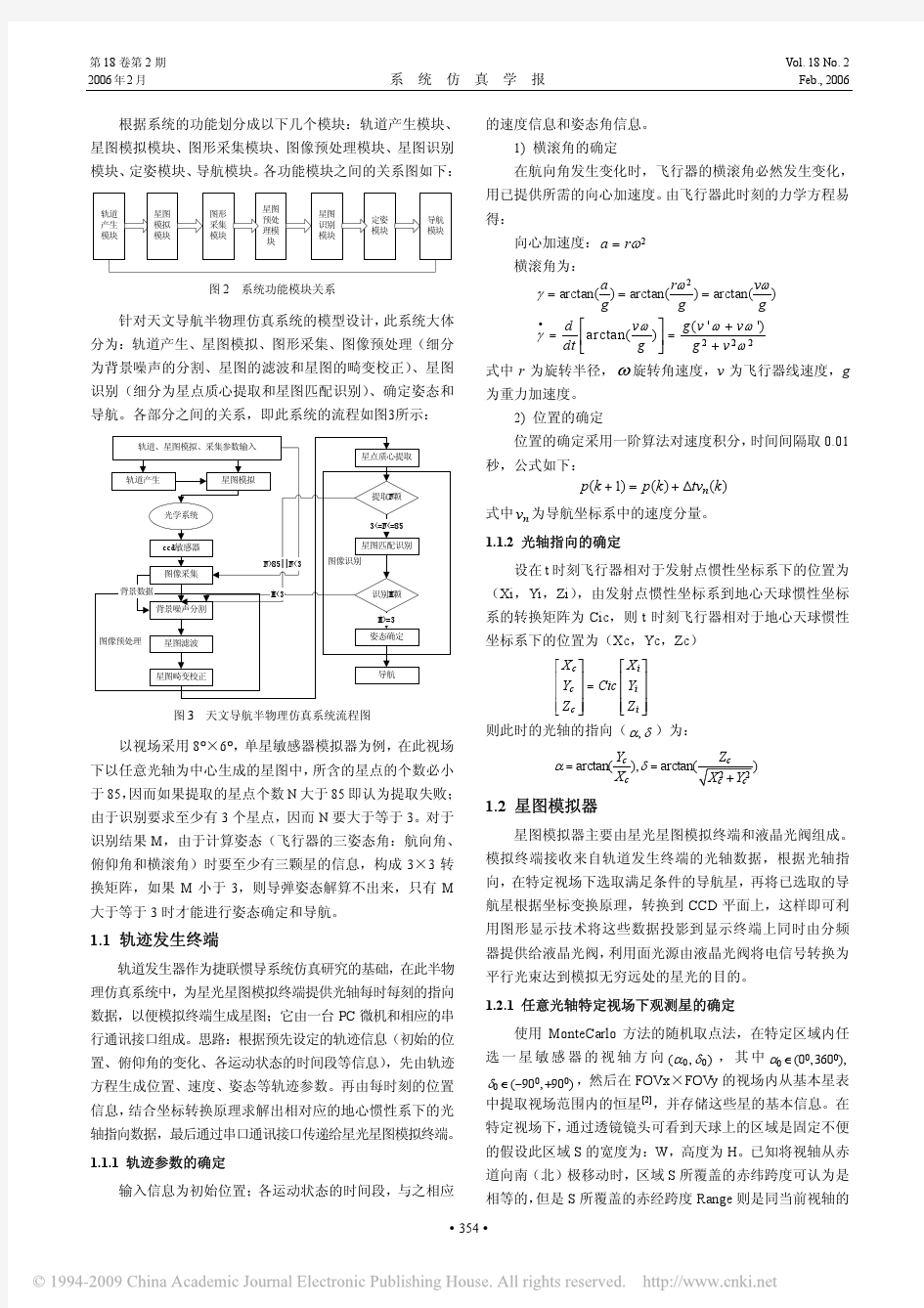
实验3.5 半加器和全加器 一、实验目的: 1.学会用电子仿真软件Multisim7进行半加器和全加器仿真实验。 2.学会用逻辑分析仪观察全加器波形: 3.分析二进制数的运算规律。 4. 掌握组合电路的分析和设计方法。 5.验证全加器的逻辑功能。 二、实验准备: 组合电路的分析方法是根据所给的逻辑电路,写出其输入与输出之间的逻辑关系(逻辑函数表达式或真值表),从而评定该电路的逻辑功能的方法。一般是首先对给定的逻辑电路,按逻辑门的连接方法,逐一写出相应的逻辑表达式,然后写出输出函数表达式,这样写出的逻辑函数表达式可能不是最简的,所以还应该利用逻辑代数的公式或者卡诺图进行简化。再根据逻辑函数表达式写出它的真值表,最后根据真值表分析出函数的逻辑功能。 例如:要分析如图3.5.1所示电路的逻辑功能。 图3.5.1 1.写输出函数Y 的逻辑表达式: B AB AB A W =.......................................... 3.5.1 C WC WC W X =......................................... 3.5.2 D XD XD X Y =.......................................... A B C D Y X W &&&&&&& &&& & &
半导体物理知识点总结 本章主要讨论半导体中电子的运动状态。主要介绍了半导体的几种常见晶体结构,半导体中能带的形成,半导体中电子的状态和能带特点,在讲解半导体中电子的运动时,引入了有效质量的概念。阐述本征半导体的导电机构,引入了空穴散射的概念。最后,介绍了Si、Ge和GaAs的能带结构。 在1.1节,半导体的几种常见晶体结构及结合性质。(重点掌握)在1.2节,为了深入理解能带的形成,介绍了电子的共有化运动。介绍半导体中电子的状态和能带特点,并对导体、半导体和绝缘体的能带进行比较,在此基础上引入本征激发的概念。(重点掌握)在1.3节,引入有效质量的概念。讨论半导体中电子的平均速度和加速度。(重点掌握)在1.4节,阐述本征半导体的导电机构,由此引入了空穴散射的概念,得到空穴的特点。(重点掌握)在1.5节,介绍回旋共振测试有效质量的原理和方法。(理解即可)在1.6节,介绍Si、Ge的能带结构。(掌握能带结构特征)在1.7节,介绍Ⅲ-Ⅴ族化合物的能带结构,主要了解GaAs的能带结构。(掌握能带结构特征)本章重难点: 重点: 1、半导体硅、锗的晶体结构(金刚石型结构)及其特点; 三五族化合物半导体的闪锌矿型结构及其特点。 2、熟悉晶体中电子、孤立原子的电子、自由电子的运动有何不同:孤立原子中的电子是在该原子的核和其它电子的势场中运动,自由电子是在恒定为零的势场中运动,而晶体中的电子是在严格周期性重复排列的原子间运动(共有化运动),单电子近似认为,晶体中的某一个电子是在周期性排列且固定不动的原子核的势场以及其它大量电子的平均势场中运动,这个势场也是周期性变化的,而且它的周期与晶格周期相同。 3、晶体中电子的共有化运动导致分立的能级发生劈裂,是形成半导体能带的原因,半导体能带的特点: ①存在轨道杂化,失去能级与能带的对应关系。杂化后能带重新分开为上能带和下能带,上能带称为导带,下能带称为价带②低温下,价带填满电子,导带全空,高温下价带中的一部分电子跃迁到导带,使晶体呈现弱导电性。
2015年11月第11卷第4期 系统仿真技术System Simulation Technology Nov.,2015Vol.11,No.4 中图分类号:TP 391.9 文献标识码:A 基于Modelica 的起落架半物理仿真设计与实现 董 政1,张洪昌1,2*,丁建完1 (1.华中科技大学CAD 中心,湖北武汉 430074;2.苏州同元软控信息技术有限公司,江苏苏州 215123)摘 要:飞机起落架系统涉及机械、液压和控制等多个领域,采用传统的单一领域仿真软件无法实现其系统级建模及半物理仿真分析。通过研究建立基于Modelica 语言的起落架半物理仿真平台,为起落架系统开发提供统一的多领域系统建模仿真环境,实现了起落架的系统级统一建模,并实现了支持Modelica 模型的半物理仿真应用,可以用来指导起落架的总体设计及验证。 关键词:起落架;Modelica ;多领域建模;半物理仿真;MWorks Hardware-in-Loop SimUlation of Aircraft Landing Gear Using Modelica LangUage DONG Zheng 1,ZHANG Hongchang 1,2,DING Jianwan 1 (1.CAD Center ,Huazhong University of Science and Technology ,Wuhan 430074,China ; 2.Suzhou Tongyuan Software ﹠Control Technology Co.,Ltd.,Suzhou 215123,China ) Abstract :Aircraftlandinggearrelatestothemechanical,hydraulicandcontrolfields,isunabletorealize theoverallmodeling, simulationandanalysisbytraditionalsinglefieldsimulationsoftware.Ahardware-in-loopsimulationplatformbasedonModelicalanguage,providesauniformenvironmentforlanding gearsystemmodelingandsimulation, realizethesystemlevelmodelingofthelandinggear,canbeusedtoguidetheoveralldesignoflandinggear. Key words :landinggear;Modelica;multi-domainmodeling;hardware-in-loop;MWorks 基金项目:国家科技支撑计划项目(No.2012BAF16G02)1 引 言 飞机起落架系统是飞机在地面停放和起降 滑跑时用于支持飞机重量、吸收撞击能量的部 件,作为飞机的关键部件之一,其工作性能直接 影响到飞机起飞、着陆性能与飞行安全[1]。飞机起落架系统是典型的复杂机电产品,由液压、机械、控制等多个领域子系统组成,从方案设计到 系统测试的整个研发过程十分复杂。随着仿真 技术的发展和应用,在起落架的设计开发过程中,越来越多的采用了数字仿真和半物理仿真技术[2,3]。但是,仅仅通过AMESim 、Matlab /Simulink 等单一领域的数字仿真工具,很难实现对起落架进行系统级建模仿真;并且,基于Matlab /Simulink 的半物理建模工具具有很大的局限性,根本无法支持机械、液压和控制等领域模 型的半物理仿真应用。
Abstract The simulation platform of virtual driving has a wide range of applications in driver training, ergonomics design research, vehicle product development and other fields. But there are some problems in the traditional virtual driving platform, such as high hardware costs, poor interaction, single type of vehicle simulation, low versatility, etc. This thesis shows how to design a hardware-in-loop simulation platform of virtual driving. Basing on the traditional virtual driving platform, hardware-in-loop simulation system is added. At the same time, this thesis also designs intelligent driving algorithms for vehicles and pedestrians so that the platform can better simulate the actual process of driving. This article mainly completed the following work. (1) This thesis proposes and designs a new platform framework combining virtual reality technology and hardware-in-loop simulation technology. This framework reduces the development cost of the traditional virtual driving platform and provides new ideas for the development of low-cost and simple virtual driving platform. (2) This thesis focuses on designing and completing the construction of virtual scenes. The setting of scene is based on the real world things, such as buildings, roads, and plants. At the same time, this thesis adds the traffic light system, street light system, 24-hour time change system, weather system. Those systems can increase the authenticity of the platform. (3) This thesis analyzes and completes the establishment of the vehicle dynamics model, such as the driving dynamics model, the braking dynamic model and the steering dynamics model. The platform simulates more realistic vehicle movements. V ehicle attributes also can be changed according to user requirements, making the platform expandable. (4) This paper has designed intelligent driving algorithms for vehicles and pedestrians. The vehicle can realize the functions of autonomous path finding, autonomous overtaking, and autonomous identification of traffic lights. Pedestrians walk freely and cross the crosswalk function according to traffic lights. Intelligent driving algorithm makes this platform more intelligent. V
基本概念题: 第一章半导体电子状态 1.1 半导体 通常是指导电能力介于导体和绝缘体之间的材料,其导带在绝对零度时全空,价带全满,禁带宽度较绝缘体的小许多。 1.2能带 晶体中,电子的能量是不连续的,在某些能量区间能级分布是准连续的,在某些区间没有能及分布。这些区间在能级图中表现为带状,称之为能带。 1.2能带论是半导体物理的理论基础,试简要说明能带论所采用的理论方法。 答: 能带论在以下两个重要近似基础上,给出晶体的势场分布,进而给出电子的薛定鄂方程。通过该方程和周期性边界条件最终给出E-k关系,从而系统地建立起该理论。 单电子近似: 将晶体中其它电子对某一电子的库仑作用按几率分布平均地加以考虑,这样就可把求解晶体中电子波函数的复杂的多体问题简化为单体问题。 绝热近似: 近似认为晶格系统与电子系统之间没有能量交换,而将实际存在的这种交换当作微扰来处理。 1.2克龙尼克—潘纳模型解释能带现象的理论方法 答案: 克龙尼克—潘纳模型是为分析晶体中电子运动状态和E-k关系而提出的一维晶体的势场分布模型,如下图所示 利用该势场模型就可给出一维晶体中电子所遵守的薛定谔方程的具体表达式,进而确定波函数并给出E-k关系。由此得到的能量分布在k空间上是周期函数,而且某些能量区间能级是准连续的(被称为允带),另一些区间没有电子能级(被称为禁带)。从而利用量子力学的方法解释了能带现象,因此该模型具有重要的物理意义。 1.2导带与价带 1.3有效质量 有效质量是在描述晶体中载流子运动时引进的物理量。它概括了周期性势场对载流子运动的影响,从而使外场力与加速度的关系具有牛顿定律的形式。其大小由晶体自身的E-k
半导体物理考点归纳 一· 1.金刚石 1) 结构特点: a. 由同类原子组成的复式晶格。其复式晶格是由两个面心立方的子晶格彼此沿其空间对角线位移1/4的长度形成 b. 属面心晶系,具立方对称性,共价键结合四面体。 c. 配位数为4,较低,较稳定。(配位数:最近邻原子数) d. 一个晶体学晶胞内有4+8*1/8+6*1/2=8个原子。 2) 代表性半导体:IV 族的C ,Si ,Ge 等元素半导体大多属于这种结构。 2.闪锌矿 1) 结构特点: a. 共价性占优势,立方对称性; b. 晶胞结构类似于金刚石结构,但为双原子复式晶格; c. 属共价键晶体,但有不同的离子性。 2) 代表性半导体:GaAs 等三五族元素化合物均属于此种结构。 3.电子共有化运动: 原子结合为晶体时,轨道交叠。外层轨道交叠程度较大,电子可从一个原子运动到另一原子中,因而电子可在整个晶体中运动,称为电子的共有化运动。 4.布洛赫波: 晶体中电子运动的基本方程为: ,K 为波矢,uk(x)为一个与晶格同周期的周期性函数, 5.布里渊区: 禁带出现在k=n/2a 处,即在布里渊区边界上; 允带出现在以下几个区: 第一布里渊区:-1/2a 半实物仿真平台简介 2.1组成 半实物仿真平台主要由主控计算机、仿真计算机、控制计算机(原型机)、A/D接口、D/A接口及相关能源设备、记录设备等组成,如图1所示。 其中被控对象采用数学仿真,由dSPACE仿真计算机通过软件实现;控制计算机用仿真实物实现,即用dSPACE标准组件作为控制计算机的快速原型机,实现控制计算机功能;仿真计算机通过A/ D、 D/A等输入输出口与控制系统实物相互,实现数字控制器与外界设备的信息交换。输入和输出信息分别从转接口和dSPACE引出,通过记录仪进行记录。 2.2主控计算机 主控计算机是整个仿真系统的上位机,采用有多个ISA总线的工控机,安装MATLAB6.5系列软件、dSPACE软件,用于构建控制系统Simulink框图、进行系统参数优化和数字仿真、控制仿真过程、编译下载仿真软件、输入输出仿真结果等。 根据控制系统设计和建模结果,利用MATLAB/Simulink构建系统数字仿真框图,进行数字仿真和控制参数优化。在数字仿真的基础上,利用dSPACE提供的RTI软件,将被控对象的Simulink框图生成实时代码并自动下载到dSPACE仿真计算机中;将控制器控制方程的Simulink框图生成实时代码并自动下载到dSPACE快速原型机中。 用dSPACE提供的综合试验与测试环境软件ControlDesk、自动实验及参数调整软件MLIB/MTRACE、PC与实时处理器通信软件CLIB 以及实时动画软件RealMotion等实现试制和参数测量。该软件环境可以方便地实成、下载和试验调试等工作。 2.3仿真计算机 用dSPACE标准组件系统DS1005PPC处理器板作为仿真计算机,用以模拟被控对象。DS1005PPC处理器与主控机之间用光缆连接交换数据。 DS1005PPC板主频480MHz;片内数缓存均为32KwordS;通过32位PHS总16块I/O板,通过ISA总线与主机进行并具有相当强的计算能力。由于PHS总线实时应用设计,所以它不存在其他外部传输协议的总线所存在的内含软件问题。 2.4控制原型机 在数字控制系统的控制计算机实物以前,dSPACE提供了良好的仿真实物。dSPACE单板系统DS1103控制器板作为用来实现控制器的控制算法。 DS1103板卡把处理器和I/O集成到一块板子上,形成一个完整的实时仿真系统。使用时将DS1103插到主控计算机ISA槽,通过I SA总线与主控机和仿真机交换数据。用这种板卡作为控制计算机的原型机可以完全模拟数字控制算法,大大缩短研制周期。 2.5输入输出接口 为了满足半实物仿真需要,采用了D转换板和DS2103 D/A转换板 西安交通大学 大学物理仿真实验报告 姓名:杨萌 班级:核工程23 学号:2120302084 日期:2013.11.25 实验名称:良导体热导率的动态法测量 一.实验目的 1.通过实验学会一种测量热导率的方法。 2.解动态法的特点和优越性。 3.认识热波,加强对拨动理论的理解。 二.实验原理 实验采用热波法测量铜、铝等良导体的热导率。简化问题,令热量沿一维传播,周边隔热,如图1所示。根据热传导定律,单位时间内流过某垂直于传播方向上面积A 的热量,即热流为 x T KA t q ??-=?? (1) 其中K 为待测材料的热导率,A 为截面积,文中x T ??是温度对坐标x 的梯度,负号表示热量流动方向与温度变化方向相反.dt 时间内 通过面积A 流入的热量 d x d t x T KA dt t q t q dq dx x x 22??=?? ??????? ????-??? ????=+ 图1 棒 元 若没有其他热量来源或损耗,据能量守恒定律,dt 时间内流入面积A 的热量等于温度升高需要的热量dt t T Adx c dq ?? ? ????=ρ,其中C ,ρ分别为材料的比热容与密度。所以任一时刻棒元热平衡方程为 (2) dx x T K t T dx C 22??=??ρ 由此可得热流方程 22x T D t T ??=?? (3) 其中ρC K D =,称为热扩散系数. 式(3)的解将把各点的温度随时间的变化表示出来,具体形式取决于边界条件,若令热端的温度按简谐变化,即 t T T T m ωsin 0+= (4) 其中T m 是热端最高温度,ω 为热端温度变化的角频率。另一端用冷水冷却,保持恒定低温o T ,则式(3)的解也就是棒中各点的温度为 )sin(202x t e T x T T D x m D ωωαω-?+-=- (5) 其中T 0是直流成分,α是线性成分的斜率,从式(5)中可以看出: 1) 热端(x=0)处温度按简谐方式变化时,这种变化将以衰减波的形式在棒内向冷端传播,称为热波. 2) 热波波速:ωD V 2= (6) 3) 热波波长:ωπλD 22= (7) 因此在热端温度变化的角频率已知的情况下,只要测出波速或波长就可以计算出 D .然后再由ρ C K D =计算出材料的热导率K .本实验采用.式(6)可得 ωρC K V 22= 则T C V f C V K πρπρ4422== (8) 其中,f 、T 分别为热端温度按简谐变化的频率和周期.实现上述测量的关键是: 1) 热量在样品中一维传播.2) 热端温度按简谐变化. 三.实验仪器 半导体物理知识整理 ————————————————————————————————作者:————————————————————————————————日期: 基础知识 1.导体,绝缘体和半导体的能带结构有什么不同?并以此说明半导体的导电机理(两种载流子参与导电)与金属有何不同? 导体:能带中一定有不满带 半导体:T=0K,能带中只有满带和空带;T>0K,能带中有不满带 禁带宽度较小,一般小于2eV 绝缘体:能带中只有满带和空带 禁带宽度较大,一般大于2eV 在外场的作用下,满带电子不导电,不满带电子可以导电 总有不满带的晶体就是导体,总是没有不满带的晶体就是绝缘体 半导体不时最容易导电的物质,而是导电性最容易发生改变的物质,用很方便的方法,就可以显著调节半导体的导电特性 金属中的电子,只能在导带上传输,而半导体中的载流子:电子和空穴,却能在两个通道:价带和导带上分别传输信息 2.什么是空穴?它有哪些基本特征?以硅为例,对照能带结构和价键结构图理解空穴概念。 当满带附近有空状态k’时,整个能带中的电流,以及电流在外场作用下的变化,完全如同存在一个带正电荷e和具有正有效质量|m n* | 、速度为v(k’)的粒子的情况一样,这样假想的粒子称为空穴 3.半导体材料的一般特性。 电阻率介于导体与绝缘体之间 对温度、光照、电场、磁场、湿度等敏感(温度升高使半导体导电能力增强,电阻率下降;适当波长的光照可以改变半导体的导电能力) 性质与掺杂密切相关(微量杂质含量可以显著改变半导体的导电能力) 4.费米统计分布与玻耳兹曼统计分布的主要差别是什么?什么情况下费米分布函数可以转化为玻耳兹曼函数。为什么通常情况下,半导体中载流子分布都可以 惯性导航的工作原理及惯性导航系统分类 惯性导航系统(INS)是一种自主式的导航设备,能连续、实时地提供载体位置、姿态、速度等信息;特点是不依赖外界信息,不受气候条件和外部各种干扰因素。 惯性导航及控制系统最初主要为航空航天、地面及海上军事用户所应用,是现代国防系统的核心技术产品,被广泛应用于飞机、导弹、舰船、潜艇、坦克等国防领域。随着成本的降低和需求的增长,惯性导航技术已扩展到大地测量、资源勘测、地球物理测量、海洋探测、铁路、隧道等商用领域,甚至在机器人、摄像机、儿童玩具中也被广泛应用。 不同领域使用惯性传感器的目的、方法大致相同,但对器件性能要求的侧重各不相同。从精度方面来看,航天与航海领域对精度要求高,其连续工作时间也长;从系统寿命来看,卫星、空间站等航天器要求最高,因其发射升空后不可更换或维修;制导武器对系统寿命要求最短,但可能须要满足长时间战备的要求。涉及到军事应用等领域,对可靠性要求较高。 惯性导航的工作原理 惯性导航系统是一种自主式的导航方法,它完全依靠载体上的设备自主地确定载体的航向、位置、姿态和速度等导航参数,而不需要借助外界任何的光、电、磁等信息。 惯性导航是一门涉及精密机械、计算机技术、微电子、光学、自动控制、材料等多种学科和领域的综合技术。其基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度、角加速度,将它对时间进行一次积分,求得运动载体的速度、角速度,之后进行二次积分求得运动载体的位置信息,然后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。百度搜索“乐晴智库”,获得更多行业深度研究报告 惯性导航系统分类 天文导航的原理及应用 天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法。 航空和航天的天文导航都是在航海天文导航基础上发展起来的。航空天文导航跟踪的天体主要是亮度较强的恒星。航天中则要用到亮度较弱的恒星或其他天体。以天体作为参考点,可确定飞行器在空中的真航向。使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。这样,从天体方位角中减去航向角就得到飞行器的真航向。通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。在这个圆上测得的天体高度角都是h。同时测量两个天体C1、C2,便得到两个等高圆。由这两个圆的交点得出飞行器的实际位置M 和虚假位置M′。再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。 天文导航的分类 按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位。 根据跟踪的星体数,天文导航分为单星、双星和三星导航。单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置。 9金属半导体与半导体异质结 一、肖特基势垒二极管 欧姆接触:通过金属-半导体的接触实现的连接。接触电阻很低。 金属与半导体接触时,在未接触时,半导体的费米能级高于金属的费米能级,接触后,半导体的电子流向金属,使得金属的费米能级上升。之间形成势垒为肖特基势垒。 在金属与半导体接触处,场强达到最大值,由于金属中场强为零,所以在金属——半导体结的金属区中存在表面负电荷。 影响肖特基势垒高度的非理想因素:肖特基效应的影响,即势垒的镜像力降低效应。金属中的电子镜像到半导体中的空穴使得半导体的费米能级程下降曲线。附图: 电流——电压关系:金属半导体结中的电流运输机制不同于pn结的少数载流子的扩散运动决定电流,而是取决于多数载流子通过热电子发射跃迁过内建电势差形成。附肖特基势垒二极管加反偏电压时的I-V曲线:反向电流随反偏电压增大而增大是由于势垒降低的影响。 肖特基势垒二极管与Pn结二极管的比较:1.反向饱和电流密度(同上),有效开启电压低于Pn结二极管的有效开启电压。2.开关特性肖特基二极管更好。应为肖特基二极管是一个多子导电器件,加正向偏压时不会产生扩散电容。从正偏到反偏时也不存在像Pn结器件的少数载流子存储效应。 二、金属-半导体的欧姆接触 附金属分别与N型p型半导体接触的能带示意图 三、异质结:两种不同的半导体形成一个结 小结:1.当在金属与半导体之间加一个正向电压时,半导体与金属之间的势垒高度降低,电子很容易从半导体流向金属,称为热电子发射。 2.肖特基二极管的反向饱和电流比pn结的大,因此达到相同电流时,肖特基二极管所需的反偏电压要低。 10双极型晶体管 双极型晶体管有三个掺杂不同的扩散区和两个Pn结,两个结很近所以之间可以互相作用。之所以成为双极型晶体管,是应为这种器件中包含电子和空穴两种极性不同的载流子运动。 一、工作原理 附npn型和pnp型的结构图 发射区掺杂浓度最高,集电区掺杂浓度最低 附常规npn截面图 造成实际结构复杂的原因是:1.各端点引线要做在表面上,为了降低半导体的电阻,必须要有重掺杂的N+型掩埋层。2.一片半导体材料上要做很多的双极型晶体管,各自必须隔离,应为不是所有的集电极都是同一个电位。 通常情况下,BE结是正偏的,BC结是反偏的。称为正向有源。附图: 由于发射结正偏,电子就从发射区越过发射结注入到基区。BC结反偏,所以在BC结边界,理想情况下少子电子浓度为零。 附基区中电子浓度示意图: 电子浓度梯度表明,从发射区注入的电子会越过基区扩散到BC结的空间电荷区, 第39卷第9期 光电工程V ol.39, No.9 2012年9月Opto-Electronic Engineering Sept, 2012 文章编号:1003-501X(2012)09-0012-06 小卫星立体成像姿态控制半物理仿真 徐开1,金光1,张刘1,孙志远1,2 ( 1. 中国科学院长春光学精密机械与物理研究所,长春 130033; 2. 中国科学院研究生院,北京 100049 ) 摘要:随着小卫星功能需求不断提升,小卫星同轨立体成像技术成为学者研究的焦点。针对某小卫星单线阵CCD 相机同轨立体成像期间的姿态控制半物理仿真展开研究。分析得出小卫星同轨立体成像过程中的姿态运行规律,对同轨立体成像的姿态控制算法进行设计,利用相似原理和姿态运行规律设计半物理仿真环境。基于高精度单轴气浮转台和星上部件建立小卫星立体成像姿态控制半物理仿真平台。利用该平台进行了同轨立体成像相关的姿态控制半物理实验。实验结果表明该小卫星立体成像过程中俯仰轴机动52°,用时67 s完成,且达到三轴稳定状态。 姿态控制指向精度优于0.05°,稳定度优于0.005 °/s。表明设计的小卫星姿控方案可以完成单线阵CCD的同轨立体成像。 关键词:立体成像;大角度机动;相似原理;半物理仿真 中图分类号:V448.2 文献标志码:A doi:10.3969/j.issn.1003-501X.2012.09.003 Semi-physics Simulation of Small Satellite Attitude Control in Stereo Imaging XU Kai1,JIN Guang1,ZHANG Liu1,SUN Zhi-yuan1,2 ( 1. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China; 2. Graduate University of Chinese Academy of Sciences, Beijing 100049, China ) Abstract: Along with the constantly promoting demand of the function of small satellite, stereo imaging of small satellite is one of hot subjects in aerospace field study recently. The study aimed at attitude control during stereo imaging in the same orbit of small satellites with single linear CCD camera. Through analysis and investigation, the operational rule of stereo imaging in the same orbit of small satellite was found out. Meanwhile, the algorithm of stereo imaging in the same orbit attitude control and semi-physical simulation system has been designed by using the similar principles and attitude operation rule of small satellite. Based on single-axis air-bearing platform and satellite components, semi-physical simulation platform of small satellite attitude control has been built. Finally, semi-physical simulation of small satellite attitude control system has been conducted at the stereo imaging. The results of the simulation indicate that small satellite pitch axis was maneuvered 52° within 75 s and three-axis reached a steady state. The pointing accuracy was 0.05° and attitude stability was 0.005°/s. It is demonstrated that the attitude control strategy can accomplish stereo imaging in the same orbit of single linear CCD optical load small satellite. Key words: stereo imaging; large angle maneuvered; similar principles; semi-physical simulation 0 引 言 航天领域对立体图像信息的需求越来越迫切,现阶段用于目标定位和立体测图的高分辨率卫星遥感影 收稿日期:2011-08-30;收到修改稿日期:2012-05-21 基金项目:吉林省自然科学青年基金(201201010);国家自然科学青年基金(61008046)资助项目 作者简介:徐开(1982-),男(满族),吉林长春人。助理研究员,博士,主要研究工作是航天器控制。E-mail: xukai118@https://www.doczj.com/doc/0219097607.html,。 https://www.doczj.com/doc/0219097607.html,半实物仿真简介
西安交大物理仿真实验实验报告(良导体热导率的动态法测量)
半导体物理知识
惯性导航的工作原理及惯性导航系统分类
天文导航的原理及应用
半导体物理与器件基础知识
小卫星立体成像姿态控制半物理仿真
相关主题
文本预览