最近几年,我国的农业发展迅速,机械化水平也在不断的提高,在新疆随着棉花的种植面积不 断的增加,棉花生产过程机械化正在一步步的完善。据统计新疆棉花的种植面积于2012 年为 2300 万亩。由于光热资源不稳定及棉花个体特性的差异,部分棉桃不吐絮。柑橘调查,棉花收获后,平 均每株棉花上留有棉桃 0.8 个,若将其全部收获,经济效益将十分的明显,而且在新疆棉花的种植 面积还在不断的扩大,劳动力却显得明显的不足,霜后的棉花很多都被遗留在面地里,为此造成一 定的经济损失。如果我们能利用机械将半开或者未开的棉桃采摘下来,就可以减少大部分的经济损 失,同时还可以起到节约劳动力减少成本的作用。根据调查了解,棉桃收获机械的应用前景十分的 广阔,棉桃收获机械的诞生将会成为一个新的领域。棉桃收获机械的生产对于新疆棉花产量的提高 具有重大的意义和作用。
关键词:新疆;棉桃;收获机械
1 绪论 (1)
1.1 选题的意义和目的 (1)
1.2 本课题国内(外)研究现状及分析 (1)
1.3 本课题所设计的任务要求及可行性分析 (1)
1.4 本课题需研究的重点及解决思路 (1)
1.5 完成本课题所需要的工作条件及解决办法 (1)
1.6 方案的确定 (1)
2 设计方案的选择 (2)
2.1 设计思想 (2)
2.2 输送传动系统的确定 (2)
2.3 系统总体方案的确定 (2)
3 棉桃采摘装置的设计 (2)
3.1 棉套采摘装置的结构 (2)
3.2 棉桃采摘装置的的工作原理 (3)
3.3 摘桃转轴的设计 (3)
3.4 留桃板的设计 (3)
3.5 水平螺旋输送机的设计 (4)
3.6V带的设计计算 (5)
3.7 各轴的转速、功率和转矩 (5)
3.8 带传动的计算 (5)
3.9 链轮的设计 (6)
3.10 轴的设计 (7)
3.11 剩桃装置的设计 (8)
3.12 输送的选择 (9)
总 结 (10)
致 谢 (11)
参考文献 (12)
1 绪论
1.1 选题的意义和目的
新疆地区是中国最主要的产棉地之一,据统计新疆 2012 年植棉意向为 2300 万亩,并且 2011 年度新疆自治区累计收购棉花338 万吨 ,约占全国棉花总产量的 1/3。新疆的棉花只有 130 多天的 生长期。新疆天山以北的产棉区,全年无霜期短,必须在两个月的时间内把棉花收回来。被遗留在 棉珠上的棉桃使得棉花的总产量减少,棉桃收获机械的诞生,将减少此类的损失同时起到节约劳动 路减少成本的作用,具有很长远及重大的意义。
1.2 本课题国内(外)研究现状及分析
1.2.1 本课题主要存在的问题
存在的主要问题是棉珠的高度不同,此时会对收获机械产生影响。收获装置中摘桃齿和机架 之间是固定的,高度也是固定的,属于不可调节,这样就造成了棉桃遗漏过多,采摘不净的现 象,解决的办法主要是,在设计采摘装的时候在壳体上添加升降装置,这样方便调节摘桃齿距离 地面的高度,挑高采净效率。
1.2.2 国外研究现状及分析
美国是世界棉花总产量较高的国家,一九七二年棉花播种面积为 8058万亩,单产皮面 72.8 斤 /亩,总产量为 5866 万担。美国棉花种植主要在南半部,以德克萨斯、密西西比、加和福尼亚等州 种植较多,他们在棉花收获方面的成就很卓越。迪尔公司于 1920 年开始研制水平摘锭的采棉机。 经过九十年几代人不断地努力, 迪尔公司目前位于美国得梅因工厂已经成为全世界最大的水平式摘 锭自走式采棉机工厂。1950 年,迪尔公司推出行内第一台自走式采棉机,它的诞生引起了当时整 个棉花生产行业的轰动。该机从棉珠的两边进行采摘,实现了棉田棉花的机械化收获,采摘效率远 远高于当时同类型的采棉机,一天的采摘效率相当于 80 名拾花工人的工作量。与其他类型的采棉 机不同的是,它仅是从开放的棉桃中采摘棉花纤维,而对未开放的棉桃不产生损伤,不会造成棉花 的减产。在采摘速度每小时为3.21 公里时,每小时采收面积可达 0.71 公顷。
1.2.3 国内研究现状及分析
4ZT-8 型摘棉桃机 4 组摘桃装置( 一次可收获 8 行) , 每组摘桃装置包含 2 对摘辊及相应的 纵向推运器, 每对摘辊对应单行棉株。采取两摘辊倾斜非对称配置, 解决了原机型结构无法适应小 行距( 30 c m) 的问题。该设计不仅充分利用了空间, 使结构更为紧凑, 且更利于棉桃向纵向推运器 滚动, 有效降低落铃率。整机主要由机架、摘桃机构总成、横向 螺旋推运 器、升运器、集桃箱及 其翻转装置、传动部分六大部分组成 [2]
1.3 本课题所设计的任务要求及可行性分析
1.3.1 任务要求
(1)该机应满足调整方便,保养方便,传动可靠等优点。
(2)能满足各种快地的棉桃后或,运转平稳,工作可靠,且维修方便。
从而解决了现有的棉桃浪费,采不净的问题,具有结构简单,试用方便、作业效率高等优点, 适合大范围的推广。
1.4 本课题需研究的重点及解决思路
利用机械采摘半开或者未开的棉桃是减少损失和提高单位产量的有效措施,同时还能起到清 地、节约劳动力的双重作用。最主要的问题是棉珠的高度参差不齐,对采摘机械的采摘产生一定的 影响,植株过低时,摘桃齿和机架是刚性连接距离是不变的,高度也无法调整,此时比较容易产生 棉桃采摘不净的情况。解决的主要办法是,在采摘装置的机壳上添加能调节采摘装置的机构,使得 摘桃齿和地面的距离有一定的伸缩,就可以提高采摘效率和采净率。
1.5 完成本课题所需要的工作条件及解决办法
由于本设计还处于初期设计阶段, 有些问题尚且不能确定, 还有待于进一步研究, 探索和完善。
1.6 方案的确定
(1)皮带轮的设计;
(2)摘桃转齿的设计;
(3)留桃板的设计;
(4)水平螺旋树洞机构(绞龙)的设计;
(5)动力的选择,转速和速度的确定。
2 设计方案的选择
2.1 设计思想
经过多次的讨论和研究,该装置的主要结构有,摘桃转齿,留桃板,装套装置,水平输送绞龙, 输送带及其他固定结构组成
2.2 输送传动系统的确定
传动可用两种方式,皮带和链传动,两者相比较皮带传动结构相对简单,安装和调节都比较容 易,但链传动却比皮带传动更适合于长时间的工作,和负荷比较重的工作。
2.3 系统总体方案的确定
(1)机器在运动过程中,棉株会进入到摘桃转齿中,随着转齿的转动棉桃就会个棉枝分离, 然而机器在运动过程中,基本呈直线作业,面地里面的棉株有可能有些生长的不规则,在转齿的两 端加上扶禾器,能将不规则的棉花向转齿的方向聚拢过来,加大了收获效率。
(2) 摘桃齿的转轴因收到扭矩和强度的限制,不能太长,因此,在两轴之间添加联轴器,即 能保证两轴可以同速转动,同时也方便了轴的制作和加工过程。
(3) 当棉桃被摘桃齿摘下时,有部分的棉桃很可能由于转轴的转速分离的作用下向外飞走, 导致棉桃被遗落,考虑到这点,在转轴的前方安装挡板,即可有效的防止类似现象的发生。
(4) 当棉桃被摘下有些可能会随着转轴的板子而转动,棉桃大部分会因转动而被甩到地下, 留桃板的添加会将呗采摘下的棉桃留在板子上,而摘桃转齿会顺利的通过缝隙继续工作。
(5) 对水平螺旋输送的修改,水平螺旋输送只会让棉桃沿装桃箱轴向运动,如果在水平螺旋 输送的一端加上叶片,此时棉桃就会被拨到与螺旋输送方向的垂直方向上,进而将棉桃输送至输送 带上。
3 棉桃采摘装置的设计
3.1 棉套采摘装置的结构
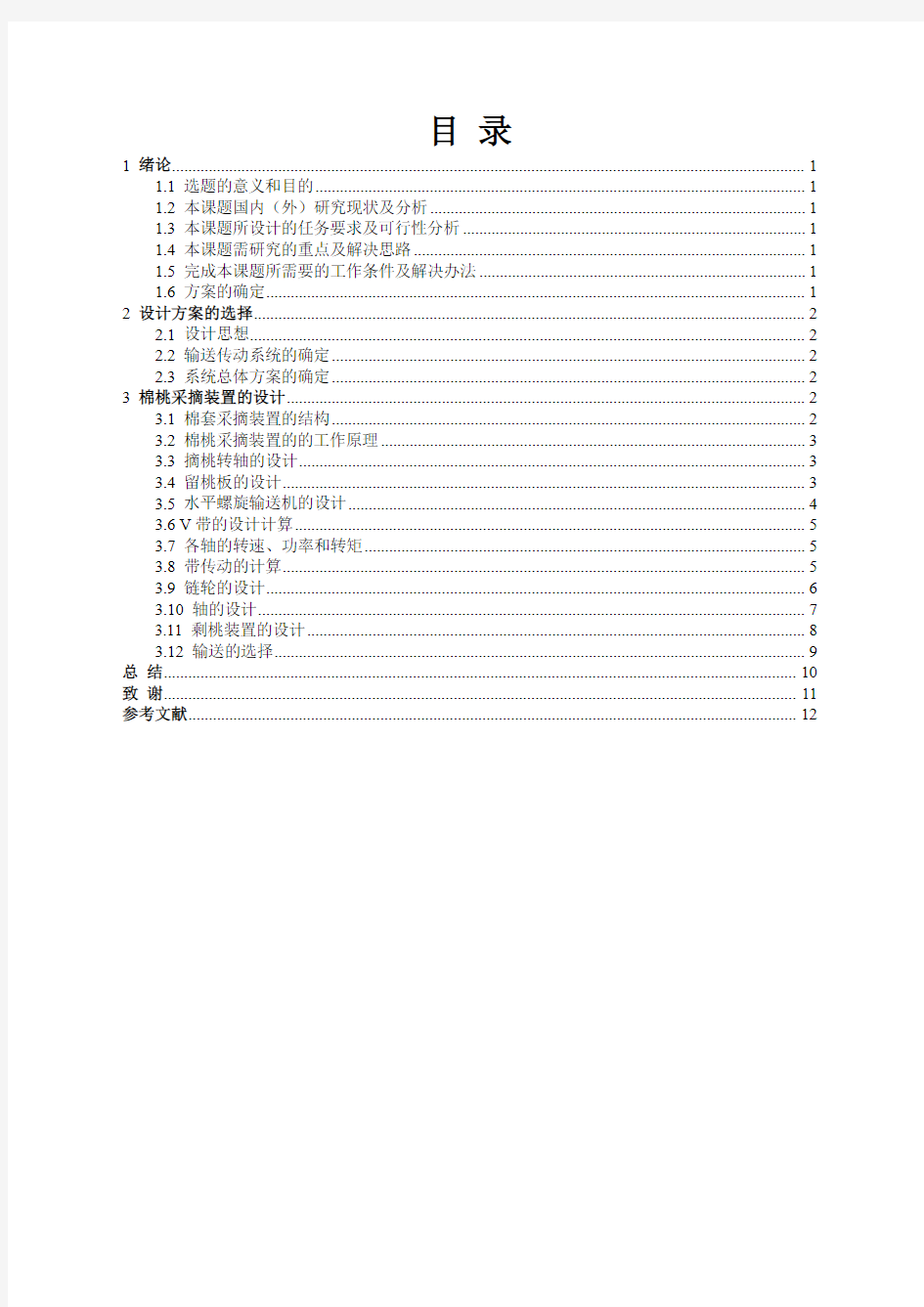
如图 3-1 所示,采摘装置主要有:1、剩桃装置;2、输送绞龙;3、留桃板;4、摘桃转齿;5、 扶禾器以及其它传动装置组成。
1.装桃装置
2.输送蛟龙
3.留桃板
4.摘桃转齿
5.分禾器
6.输送带
图 3-1 总体装配图
3.2 棉桃采摘装置的的工作原理
机器在远运动过程中,通过摘桃齿的旋转将棉株上的棉桃摘下,摘桃齿继续转动随即摘桃齿通 过留桃板上的齿缝,而被摘下的棉套遗留了下来,从倾斜一定的角度的留桃板上下滑至一定容积的 装桃装置中,此时运动着的水平螺旋输送装置将一定数量的棉桃运至一端,再由传送带运送至车厢 内。
3.3 摘桃转轴的设计
(1)根据新疆生产建设兵团的棉花的种植方式,精量播种机单体播种装置和棉花株间与行距 以及收获时间棉花的生长总高度决定了摘桃齿的设计方向。
(2)在兵团棉花种植方式中,相邻两行棉株之间的距离为 10mm,两膜中棉株的之间的距离为 66mm。 根据设计中所选择的材料和材料所要变形达到的尺寸, 可以确定摘桃齿的宽度约为 180mm, 摘桃齿的材料采用 3#h厚度 3.mm的角钢,变形过程中,其余参数不变,摘桃齿的齿与齿之间的距 离约为 10.02mm,摘桃齿的顶端设计为尖头,这样方便与棉秆的导入。如图 3-2。
图 3-2 摘桃转齿
(3)摘桃转齿是整个棉桃收获装置中的主要零部件,其作用是,通过两齿之间的缝隙和不停 的旋转将棉桃从棉枝上摘下,从而达到脱离棉桃的作用。
3.4 留桃板的设计
留逃板的设计图如图 3-3。
图 3-3 留桃板
(1)设计留桃板的目的是为了防止,棉桃在被摘桃齿摘下后随摘桃转轴做圆周运动时,由于 速度较大可能会将采摘下来的棉套运至下方,掉落在地面上。当在摘桃的一侧安装上留桃板时,摘 桃齿可以通过留桃板的齿缝,而棉桃则被留在板面上向下滑落进入装桃装置中,这样就增加了棉桃
的收获率,减少不必要的浪费。 3.5 水平螺旋输送机的设计 3.5.1 螺旋输送机的主要特点
(1)承载能力大、安全可靠。
(2)适应性强、安装维修方便、寿命长。
(3)整机体积小、转速高,确保快速均匀输送。 3.5.2 水平螺旋输送机的工作原理
当物料从进料口加入,转轴开始转动时候,物料受到螺旋叶片的法向推力的作用。该推力的径 向推力和叶片对物料的摩擦力,有可能带着物料绕轴转动,但由于物料本身的重力和料槽对物料的 摩擦力的缘故,不不与螺旋叶片一起旋转,而在叶片的法向推力的轴向分力作用下沿着料槽轴向移 动。
3.5.3 计算输送量
图 3-4 水平输送装置
螺旋输送的生产效率 Q=15t/h,水平输送的距离为0.890m.,水平螺旋直径 D=14mm 。如图所示。 螺旋转速:
因为
tan H
D b p =
及摩擦系数f=tanΦ,则有
2 tan sin = 1tan b b b + (3-1)
2 1
cos =
1tan b b
+ (3-2)
而将以上式子代入(1)(2)(3)后化简可得:
2
tan =
601tan n H f V b
b + ×
+ 圆 (3-3) 2
1tan = 601tan n H f V b b - ×
+ 轴 (3-4)
式中:
N —为主轴转速(r/min ); D —为叶片外径(m ); H 为叶片螺距(m );
V 合为主轴合速度(m/min )。
2 tan =
=203 601tan n H f V b
b
+ × + 圆 (3-5)
3.6 V 带的设计计算
图 3-5 皮带轮
计算单根 V 带的额定功率 Pr
由 dd1=56mm 和 n1=1400r/min ,查参考文献[2]中表 8-4a 得 p0=0.19kW 。 根据 n1=1400r/min,i=4 和 Z 型带,查参考文献[2]中表8-4b 得△p0=0.03kW 。 查参考文献[2]中表 8-5 得 Kα=0.94,表 8-2 得 KL=1.11,于是
r 00 P ()(0.190.03) 1.110.940.32 L P P K K kW kW
a =+D ××=+′′= (3-6)
r P 1.1 3.4
P 0.32
ca z === 结合实际取 3 根。
3.6.2 传动比的分配
(1)计算总传动比: 500 50 100
m w n i n === ; (2)传动比的分配取: 1,23 316.66 i i i = ′= ;
(3)低级传动比: 3 3.33 i = 。 3.7 各轴的转速、功率和转矩
转速: 1 233.33/min 7003
r n = = 功率: 14 0.0870950.0826 d p p kW
h ==′= 扭矩: 1 1 1 3.8 9550 95500.0826 233.33 N m
p T n =
=× ′ = 转速: 2 46.66/min
700 35
r n = =
′ 功率: 2123 0.078 p p kW
h h == 扭矩: 2 2 2 15.96 9550 95500.078 46.66
N m
p T n =
=× ′ = 3.8 带传动的计算
(1)设计功率
由机械设计基础中(以后用表均出自本书)表 13-8 得工况系数
1.2 A K = ,故
1.2
2.2 2.64 c A P K P kW kW
==′= (3-7)
(2)选择带型
根据 1 2.64940/min c P kW n r == , 由图 13-5查得选用 A 型带传动。 (3)确定大、小带轮的基准直径 由表 13-9 知, 1 d 应不小于 75,现取 1 125 d mm
= ,可得 1
21 2 940 (1)125(10.02)308.7 373
n d d mm mm n e =
-=′′-= (3-8)
由表 13-9 取 2 315 d mm
= (4)验算带速
11
125940
/ 6.15/ 601000
601000
d n v m s m s
p p ′′ =
=
= ′′ (3-9)
带速在 5~25m/s 之间,合适。 (5)V 带的基准长度 d L 和中心距 a
初步选取中心距
012 1.5() 1.5(125315)660 a d d mm mm =+=′+= (3-10)
2 2
21 0012 0 () (315125) 2()[2660(125315)]2024.824 2424660
d d L a d d mm mm a p p - - =+++=′+′++= ′ (3-11)
查表 13-2,取 2240 d L mm = 实际中心距
0 22402024.824 (660)767.588 22
d L L a a mm mm - - ?+
=+= (3-12)
3.9 链轮的设计
链传动是通过链条将具有特殊齿形的主动链轮的运动和动力传递到具有特殊齿形的从动链轮 的一种传动方式。 链传动有许多优点,与带传动相比,无弹性滑动和打滑现象,平均传动比准确, 工作可靠,效率高;传递功率大,过载能力强,相同工况下的传动尺寸小;所需张紧力小,作用于 轴上的压力小;能在高温、潮湿、多尘、有污染等恶劣环境中工作。 链传动的缺点主要有:仅能 用于两平行轴间的传动;成本高,易磨损,易伸长,传动平稳性差,运转时会产生附加动载荷、振 动、冲击和噪声,不宜用在急速反向的传动中。
(1) 链轮齿数
由轴 3 功率 3 2.31 P kW = , 4 3
64.03/min n n r == 轴 传动比 34 2.33 i = 查表 13-12 得: 1 25 z = 大链轮齿数 21 2.332558.25
z iz ==′= (3-12)
取 2 57 z = ,实际传动比
57
2.28 25
i == 误差远小于 5% ± ,故允许。 (2)链条节数
初定中心距 0 40 a p = 得:
22 0
1221 0 4025575725 2
()2()122 222402 p a z z z z p p p L p a p p p p
+- +- =++=′++? 节 (3-13)
取链条节数为 122 p L = 。 (3)计算功率
由表 13-13 得: 1.4 A K = ,故
1.4
2.31
3.23 c A P K P kW kW
==′= (3-14)
(4)链条节距
估计链传动工作于图 13-33 所示曲线顶点的左侧(即可能出现链板疲劳破坏),由表 13-13 得
1.08 1.08 1 25
()() 1.34
1919
z z K === (3-15)
采用单排链, 1.0 m K =
,故 0 3.23 2.40 1.34 1.0 c
z m P P kW kW
K K === ′ (3-16)
由图 13-33 查的当
4 3
64.03/min n n r == 轴 时,12A 链条能传递的功率为 3( 2.40) kW kW > ,
故采用 12A 链条,节距 19.05 p mm = 。 3.10 轴的强度校核
图 3-6 轴
表 3-1 轴的常用材料及其主要力学性能
材料 牌号
热处 理
毛坯直径 /mm
硬度 HBW
抗拉 强度 b
s 屈服 点
a
s 弯曲
疲劳 极限
1 s - 扭转 疲劳 极限
1
t - 许用静 应力 1 []
s + 许用疲劳 应力
1 []
s - 备注 MPa 45
正火
25
241
£ 610 360 260 150 244 173~200 应用最广泛
正火
回火
100
£ 170~217 162~217 156~217
600 300 240 140 240 160~184 >100~30
0 580 290 235 135 238 156~180 >300~50
0 560 280 225 130 224 150~173 >500~75
540
270 215 125 216 143~165 调制
200
£ 217~255 650 360 270 155 260 180~207 20Cr
渗碳 15 表面 56~62 HRC
850 550 375 215 340 208~250 淬火 30
650 400 280 260 260 155~186 回火
60
£ 650
400
280
260
260
155~186
(1)求垂直面的支撑反力
2 1 22 288 a v L d Fr F F L
′ =
′- = N (3-17)
21 641288353 v r V F F F N
=-=-= (3-18) (2)求水平面的支撑反力
t
1h 2h =F =
=875 2
F F N (3-19)
(3)F 在支点产生的反力
1f =
=744 F K
F N L
′ (3-20) 2f 1 =1194 f F F F N += (3-21) (4)绘制垂直面的弯矩图
2 3530.037513.2375 2 v L
Mav F N m =′
=′=× (3-22) 1 '2880.037510.8 2 v L
M av F N m
=′=′=× (3-23)
(5)绘制水平面的弯矩
a 1h 32.815 2
h L
M F N m =′
=× (3-24) (6)F 力产生的弯矩
2 55.8 F M F K N m
=′=× (3-25) 截面 F 力产生的弯矩
1 27.9 2
aF f L
M F N m =′
=× (3-26)
(7)求合成弯矩图
考虑到不利的情况,将两者相加
22 a =62.4 aF M M av M ah M N m
++=× (3-27) (8)求轴传递的转矩
2
t 14.79 2
d T F N m ′
==× (3-28)
(9)求危险截面的当量转矩
22
e ()
a M M T a =+ (3-29) 如果认为轴的扭切应力是脉动循环变应力,取折合系数 =0.6 a ,带入上式即可得
=62.47 e M N m
× (3-30)
(10)计算危险截面处轴的直径
[ ]
3
1 d 2.18mm
0.1 b
Me
s
- 3
= (3-31)
考虑到键槽对轴的削弱将 d 的值放大 5%,故
d=2.18′1.05=2.229mm
3.11 剩桃装置的设计
(1)剩桃装置的设计作用主要是缓冲和存放。棉套由留桃板下滑进入剩桃装置中,因为水平 螺旋输送能力有限,始终会有一部分的棉套遗留,有了剩桃装置后,棉桃就不会落入地面,进而棉 桃也会顺利的由水平螺旋输送器输送到传送带。如图3-7
图 3-7
(2)当棉桃由螺旋输送器输送到剩桃箱的一端时,棉套就会在螺旋板的推动下被拨到输送带, 因此,在剩桃箱的一端打开一定长度的口子,这样方便了棉桃的输送。
3.12 输送的选择
(1)输送带又叫运输带,是用于皮带输送带中起承载和运送物料作用的橡胶与纤维、金属复 合制品,或者是塑料和织物复合的制品。皮带输送机在农业、工矿企业和交通运输业中广泛用于输 送各种固体块状和粉料状物料或成件物品,输送带能连续化、高效率、大倾角运输,输送带操作安 全,输送带使用简便,维修容易,运费低廉,并能缩短运输距离,降低工程造价,节省人力物力。
(2)传送带分为:普通传送带、三耐传送带、阻燃传送带。
根据棉桃的摩擦力较小,在选择传送带时应具有较大的摩擦力,选择普通传送带,在传送带上可以
添加一定数量的板子,这样可以有效的阻挡棉桃的滑落,增加传送效率。
总 结
1、本次设计的棉桃收获机械的前置装置,运行可靠,摘桃转齿转动速度平稳,但齿的底端距 离棉株底端的棉桃高度还需调节。
2、 当棉地里面的棉株长势大约一致,或者是棉地地面较为平坦时,棉桃收获装置的作业效率 会有明显的提高,然而,当棉株的长势相差太多,或者地势不平整该收获装着不具有仿形结构,很 容易造成遗漏棉桃的后果。
3、本次的毕业设计是对大学四年中所学知识的一种总结或者说是对我们能力的一种考核,锻 炼了我们的创新能力自学能力以及是否具有良好的沟通能力。
4、通过此次设计,发现了自己身上存在的很多问题,例如:
(1)自己的理论知识还是很薄弱,设计中的很多问题感觉都是无从下手,对一些抽象的事物 理解的还不是很到位。
(2)做设计时,由于自己的思路不完整,导致一些地方反复修改,严重影响了自己的作业速 度。
(3)在运动绘图软件 Solidworks 和 CAD 绘制图形时,由于对绘图软件的掌握不熟练以及一 些快捷的方法的不了解同样放缓了工作进程。
总体来说,以上的不足同时也成为了自己的一种经验,不仅对自己的一些专业知识有了更详细 的了解,同时也锻炼了自己的动手能力,以及独立思考的能力。
致 谢
首先感谢我的指导老师,本次的设计都是在马少辉老师的耐心的指导下完成的,马老师耐心的 讲解对我的设计提出修改和完善,每一个微小的细节都能发现并且指出,这无疑是在我迷茫时候的 一盏照明灯,让我的眼界慢慢变得开阔和明朗。 于此同时自己查阅了一些资料,还有一些课本上 不完善的知识,也慢慢的开始了解。这些同样让自己变的更加充实,受益匪浅。同样要感谢各组的 课题老师,为我们提供了一个交流的平台,对我们的帮助很大,谢谢老师们。
大学四年转眼间就要过去了,再次我也感谢自己的老师、同学和好朋友,感谢塔里木大学,能
“自 给自己一次大学四年的经历, 让自己的人生多了一道美好的回忆。 每每想到塔里木大学的校训: 。就会想到学校的老师,同学和在学校的每一年的生活时光。校训始终记在自 强不息,求真务实”
己的心中,自始至终都是,加油,自己、加油,大家。
再次感谢我的老师和同学们,没有他们的帮助自己也许还不能顺利的完成本次毕业设计。再次 感谢所有向我提供帮助的同学和老师,祝老师和同学们身体健康、工作顺利。
最后感谢父母对自己四年的支持,父母辛勤的劳动换来了自己四年的大学,谢谢你们。
参考文献
[1] 张新昌,田学艳,叶云霞,张 鑫,苏克诚,蔡兴德,孙建新.摘辊式摘棉桃机的研制[J].石河子大学学报
(自然科学版),2000,15(04):22 一 23.
[2] 杨可桢,程光蕴,李仲生主编. 机械设计基础[M].第5 版.北京:高等教育出版社,2006.5.
[3] 肖远金.4zJ-8型摘棉机和 SMJB-1.5 型剥桃净棉机[J].农业装备技术,2003,26 (04).
[4] 濮良贵主编.机械设计[M].北京:高等教育出版社,1989:139-14.
[5] 张新昌,田学艳,张 鑫,蔡兴德,孙建新.摘辊式摘棉桃机的研究[J].石河子大学学报(自然科学版), 2000,15(04):22-23.
[6] 王旭峰,梁建龙,张 宏,王 伟.MT-1800 型棉桃收获机设计[J].《农业机械》2008 年第26 期.
[7] 肖远金,张 鑫,张兴昌,田学艳.42T-8型摘棉桃机[J].新疆农机化,2000.13(02):49-15.
[8] 付胜利.4TSL-2型甜菜收获机的研究与设计[J].黑龙江省畜牧业机械化研究所.
[9] 中国农业机械化科学研究院,农机机械设计手册[M] .北京:机械工业出版社,1990:2.3-209.
[10] 吴宗泽,罗圣国主编.机械设计课程设计手册[M].第 3 版.北京:高等教育出版社,2006.5.
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910369070.7 (22)申请日 2019.05.05 (71)申请人 安徽工程大学 地址 241000 安徽省芜湖市鸠江区北京中 路8号 (72)发明人 高洪 孙孟洋 王亚军 贡军 段陈义 王永强 方啸宇 代贡献 叶凯强 (74)专利代理机构 芜湖安汇知识产权代理有限 公司 34107 代理人 朱顺利 (51)Int.Cl. A01D 46/24(2006.01) G06F 17/50(2006.01) (54)发明名称水果采摘机果柄切割装置的设计方法(57)摘要本发明公开了一种水果采摘机果柄切割装置的设计方法,包括步骤:S1、提供固定盘、由多个切割刀片组成的刀片组及相对于固定盘可旋转且用于控制切割刀片进行旋转的旋转盘;处于打开状态的刀片组的中心处形成有让水果通过的第一避让孔;S2、根据固定盘的第二避让孔的直径和旋转盘的定位孔的直径,确定刀片本体的刀口的弦长;S3、根据固定盘的第二避让孔的直径,确定切割刀片的第一销轴的轴心与第二销轴的轴心之间的距离;S4、根据固定盘的第二避让孔的直径和切割刀片的第一销轴的轴心与第二销轴的轴心之间的距离,确定旋转盘的转角。采用该方法设计的水果采摘机果柄切割装置可以使果柄很好的定位被切断,减少采摘时对水果造 成的损伤。权利要求书2页 说明书10页 附图6页CN 110063136 A 2019.07.30 C N 110063136 A
权 利 要 求 书1/2页CN 110063136 A 1.水果采摘机果柄切割装置的设计方法,其特征在于,包括步骤: S1、提供固定盘、由多个切割刀片组成的刀片组及相对于固定盘可旋转且用于控制切割刀片进行旋转的旋转盘;处于打开状态的刀片组的中心处形成有让水果通过的第一避让孔; S2、切割刀片设计成具有刀片本体以及与刀片本体连接的第一销轴和第二销轴,旋转盘设计成具有让第一销轴插入的导向孔,固定盘设计成具有让第二销轴插入的安装孔和让水果通过的第二避让孔; 根据固定盘的第二避让孔的直径D1和旋转盘的定位孔的直径D2,确定刀片本体的刀口的弦长l1, S3、根据固定盘的第二避让孔的直径D1和固定盘的内直径D3,确定切割刀片的第一销轴的轴心与第二销轴的轴心之间的距离l2, S4、根据固定盘的第二避让孔的直径D1和切割刀片的第一销轴的轴心与第二销轴的轴心之间的距离l2,确定旋转盘的转角α, 2.根据权利要求1所述的水果采摘机果柄切割装置的设计方法,其特征在于,90°<θ≤120°。 3.根据权利要求1或2所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述导向孔设计为圆弧形孔,导向孔的长度大于所述第一销轴的直径且导向孔的轴线与第一销轴的轴线相平行。 4.根据权利要求3所述的水果采摘机果柄切割装置的设计方法,其特征在于,对于周向上相邻的两个切割刀片,让其中一个切割刀片的第一销轴插入的导向孔的轴线与另一个切割刀片的第二销轴的轴线共线,导向孔以位于其径向上的第二销轴的圆心为圆心。 5.根据权利要求1至4任一所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述旋转盘上设有拨柄,拨柄用于承受外界施加的使旋转盘旋转的旋转力矩,所述固定盘设计成具有让拨柄穿过的第三避让孔。 6.根据权利要求1至5任一所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述固定盘设计成具有第一盘体和设置于第一盘体上的凸台,凸台设计成插入定位孔中,所述第二避让孔为在凸台上贯穿设置的圆孔,所述切割刀片通过第二销轴与凸台转动连接。 7.根据权利要求6所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述固定盘设计成还具有与所述第一盘体连接的外檐和与第一盘体相对布置的第二盘体,第一盘体和第二盘体均为圆盘状结构且第一盘体和第二盘体为同轴设置。 8.根据权利要求7所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述外檐为圆环形结构且外檐与所述第一盘体和第二盘体的外边缘连接,外檐与第一盘体和第二盘体为同轴设置,所述切割刀片位于第二盘体和所述凸台之间。 9.根据权利要求1至8任一所述的水果采摘机果柄切割装置的设计方法,其特征在于, 2
本科毕业设计(论文)通过答辩 摘要 现在农业采摘已采用专业化、集约化和规模化采摘,农业采摘机成为当今世界最具活力的新兴农业机械之一和现代农业机械的亮点。结合我国农业生产的实际需要,针对浆果采摘机农业机械市场的特点,对浆果采摘机进行了研究、开发,设计研制出一种可自动完成对浆果的采摘及收获的机械。 课题从浆果采摘机原动部分及传动部分的设计、工作部分的设计、液压系统的设计等多方面详细介绍了研究过程与方法,并给出了安装及维护的注意事项。 本设计以拖拉机作为原动机,通过拖拉机的拖拽,实现了浆果采摘机的行驶功能,液压马达为动力源,采用四连杆机构实现了采摘机的采摘功能。针对不同的农业地况,车体设计成可升降的结构。 关键词:浆果采摘机;结构设计;理论计算
本科毕业设计(论文)通过答辩 Abstract Now agricultural picking has adopted specialized, intensive and large-scale agriculture picking, picking machine becomes the world's most dynamic emerging agricultural machinery and modern agricultural machinery window. With China's agricultural production actual need, according to berry picking machine agricultural machinery market characteristics, the berry picking machine undertook research, development, design and develop a automatic completion of the berry picking and harvesting machinery. The berry picking machine driving part and a transmission part of the design, part of the design work, the design of hydraulic system and other aspects detailed introduces the study process and method, and gives the installation and maintenance of the matters needing attention. The design of tractor as motive, the tractor drag, realizes the driving function of berry picking machine, hydraulic motor as a power source, four connecting rod mechanism is adopted to realize picking machine picking function. In view of the different agricultural condition, body is designed into a lifting structure. Keywords:Berry picking machine; Structure design; Theoretical calculation
加QQ1638290842 毕业设计说明书 题目:草莓采摘机设计 专业:机械设计制造及其自动化 学号: 姓名: 指导教师: 完成日期:
目录 摘要 (1) Abstract (2) 第一章绪论 (3) 1.1. 引言 (3) 1.2. 草莓采摘机国内外研究现状 (3) 1.2.1. 国外研究现状 (3) 1.2.2. 国内研究现状 (4) 1.3. 研究的目标和内容 (5) 1.3.1. 研究目标 (5) 1.3.2. 采摘机采摘原理简介 (5) 第二章草莓采摘机总体方案设计 (7) 2.1. 草莓采摘机结构设计及其计算 (7) 2.2. 草莓采摘机设计及其材料选择 (8) 第三章采摘装置的设计 (9) 3.1. 采摘挡板的设计 (9) 3.2. 弹簧的设计 (9) 3.3. 滚轮的设计 (11) 第四章电动机的选择 (12) 4.1. 传动比的分配 (13) 第五章V带传动的设计 (15) 5.1. V带参数计算 (15) 第六章齿轮的设计 (17) 6.1. 齿轮相关参数初步确定 (17) 6.2. 按齿面接触强度设计 (17) 6.3. 按齿根弯曲疲劳强度设计 (19) 6.4. 几何尺寸的计算 (20) 第七章轴的设计 (22) 7.1. 轴的材料 (22) 7.2. 轴的参数设计 (22) 7.3. 轴承的强度校核 (27) 第八章传送装置的设计 (29) 8.1. 传送带的宽度设计 (29)
8.2. 传送带的选型 (29) 8.3. 滚筒的选择 (29) 结论 (31) 参考文献 (32) 致谢 (33) 附录 (34)
草莓采摘机设计 摘要:现在国内的农业采摘虽然对于大部分水果都有专业的采摘设备,但是对于草莓采摘还是一大难点,所设计的采摘设备针对特殊地形和栽种方式还有保持果实的完整度都有一定的难度。本设计对现阶段我国草莓种植环境进行相关了解,再结合实际采摘情况,针对草莓采摘需要注意的一些细节进行分析,设计出合理的采摘机构,实现对草莓的大批量采摘。 所设计的草莓采摘机以人力推动或机器牵引,通过拖拽,实现了草莓采摘机的行驶功能。针对不同草莓田垄形状,采摘装置加入了收紧滚轮的结构,以便适应多变的地形。 设计过程包含了草莓采摘机的电机选择,传动部分零件的材料选择及设计,及采摘部分和传送部分的设计和分析。 关键词:草莓采摘机;结构设计;理论计算
水果采摘机械手的设计 发表时间:2019-07-29T10:22:58.127Z 来源:《基层建设》2019年第14期作者:李永峰闫晓桂王光宇裴福玉 [导读] 摘要:机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。 哈尔滨远东理工学院黑龙江哈尔滨 150025 摘要:机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子轻工和原子能等部门。由于机械臂在各行各业中得到了愈来愈广泛的应用,机械臂控制的多样化、复杂化的需要也随之日趋增多。作为当今科技领域研究的一个热点,提高机械臂的控制精度、稳定性、操作灵活性对于提高其应用水平有着十分重要的意义。在原有机械手上进行PLC等设计可使机械手实现自动化定位控制丶自动化工作等。通过重新编程序可使其变成多功能机器。 关键词:采摘;机械手;水果 1、机械手的发展趋势 机械手是集机械、电子、控制、计算机、信息等多学科交叉综合,它的发展和进步依赖并促进相关技术的发展和进步。因此,机械手的主要发展方向如下: 机械结构向模块化、可重构化发展。例如关节模块中的伺服电机、减速机、检测系统三位一体化:由关节模块、连杆模块用重组方式构造机器人整机;国外已有模块化装配机器人产品问市。 机械手控制系统向基于pc机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。 机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机械手还应用了视觉、力觉等传感器,而遥控机械手则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制。 虚拟现实技术在机械手中的作用从仿真、预演向用于过程控制发展,如使遥控机械手操作者产生置身于远端作业环境中的感觉来操纵机械手 2、设计水果采摘机械手的作用 据统计,2017年全国水果总产量(不含瓜果类,下同)达到1.82亿吨,比1978年增长26.7倍,年均增速8.9%。自1994年以来,我国水果总产量稳居世界第一。但目前存在果园人力不足、采摘效率低、有时因为采摘不及时水果坏掉、果子结在高处人工面临着高空采摘的危险等问题,而一切采摘过程目前都由人工采摘,在我国机械化的采摘目前处于空白期,即使有机械化机器的投入和使用也是个别体,且机器的投入成本往往很大,果农无法承担此高昂的成本使用该器械。 果实的采摘是一个季节性较强和劳动密集型的工作,采摘作业所用劳动力占整个生产过程所用劳动力的33% ~50%,采摘作业比较复杂,季节性很强,若使用人工采摘,不仅效率低、劳动量大,而且容易造成果实的损伤。使用采摘机械不仅提高采摘效率,而且降低了损伤率,节省了人工成本,提高了果农的经济效益。 目前而言我国是世界水果生产大国,但在果园管理程度不高(尤其是机械化采摘果品)由于人口老龄化和农村劳动力越来越少,在单调、繁重、危险的果实采摘作业上急需高效、通用、低成本的采摘技术,而智能化技术的出现和应用让人们的生活变得更加方便快捷,与传统机械臂相比,拥有智能化,仿生化等技术的机械臂操作起来更加简单方便快捷,运用起来也更加灵活多变,智能制造技术是未来先进制造技术发展的必然趋势,是抢占产业发展的制高点必胜法则。 3、水果采摘机械手的整体方案设计 为了使机械手的通用性更强,把机械手的手部结构设计成可更换结构,当工件是棒料时,使用夹持式手部。考虑到机械手的通用性,同时由于被抓取物件位置的不确定性,因此手腕必须设有回转运动才可满足工作的要求。因此,手腕设计成回转结构,实现手腕回转运动。按照抓取工件的要求,本机械手的手臂有三个自由度。 由于系统的动作迅速,反应灵敏,阻力损失和泄漏较小,成本低廉因此本机械手采用机械传动方式。考虑到机械手的通用性,同时使用点位控制,因此我们采用可编程序控制器(PLC)对机械手进行控制。当机械手的动作流程改变时,只需改变PLC程序即可实现,非常方便快捷。 4、水果采摘机械手的设计内容 语音驱动技术:利用语音识别系统,声电转化系统,电路系统等,对采集的目标语音进行处理,将发出的声音指令进行信息化处理,最后由指令声响效果激发拾音器进行声电转换来控制用电器的开关,并经过延时后能自动断开电源,从而达到声控制动的效果。 传感技术:在机器上安装相应的传感器,使其达到预想的结果。红外传感:检测物体信息执行动作;声音传感:检测声音执行动作;倾角传感器:用倾斜角度的大小来实现对机器的旋转。 开发无人操控,将机器开发为可人为控制和自行运行模式,运用单片机编程技术,和红外传感技术,对机器进行软件编程,在无人操作下,开启自动运行,实现对果物的自行摘取。 体感技术:运用体感技术,以达到人机合一的效果。 机器驱动设计:由于工作环境不用,对机器行驶要求不同,而在果园大都为凹凸不平的土质地面,所以在驱动方面采用履带式设计,其好处在于其可以减少路况对机器行驶的限制,可以在恶劣路况下完成工作。 电源设备的改进及应用:由于产品最终投入果园进行长运作,而又要确保对环境的保护,在确保不影响环境的情况下动力的选用尤为重要,供电设备的选用也将是研究的重之重。 设备的安全性:通过对设备机体结构的设计,确保其在运行过程中能够安全稳定的工作,并要对线路的安排布置也要做出相应的措施。并要对设备加装一些应急错失和短路保护装置。 5、结束语 本次设计的机械手,相对于专用机械手,通用机械手的自由度可变,控制程序可调,因此适用面更广。动作迅速,反应灵敏,能实现过载保护,便于自动控制。工作环境适应性好,不会因环境变化影响传动及控制性能。阻力损失和泄漏较小,不会污染环境。同时成本低
水果采摘装置设计 0文献综述 0.1水果采摘实现机械化的必然趋势 在水果的生产作业中,收获采摘是整个生产中最耗时最费力的一个环节。 水果收获期间需投入的劳力约占整个种植过程的50%~70%采摘作业质量的好 坏直接影响到水果的储存、加工和销售,从而最终影响市场价格和经济效益。水果收获具有很强的时效性,属于典型的劳动密集型的工作。但是由于采摘作业环境和操作的复杂性,水果采摘的自动化程度仍然很低,目前国内水果的采摘作业基本上还是手工完成。在很多国家随着人口的老龄化和农业劳动力的减少,劳动力不仅成本高,而且还越来越不容易得到,而人工收获水果所需的成本在水果的整个生产成本中所占的比例竟高达33%~50%高枝水果的采摘还带 有一定的危险性。因此实现水果收获的的机械化变得越来越迫切,发展机械化的收获技术,研究开发水果采摘机器人具有重要的意义。 研究和开发果蔬收获的智能机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本、保证新鲜果蔬品质,以及满足作物生长的实时性要求等方面都有着重要的意义。采摘机器人是未来智能农业机械化的发展方向,具有广阔的应用前景。2004年11月1日颁布施行的《中华人民共和国农业机械化促进法》还明确规定国家采取措施鼓励,扶持农业机械化的发展,机械采摘取代手工作业是必然的发展趋势。 0.2国外水果机械化采摘装置研究进展及现状 水果的机械化收获技术已有40余年的研究历史。收获作业的自动化和机器人的研究始于20世纪60年代的美国,1968年美国学者Schertz和Brown首次提出应用机器人技术进行果蔬的收获,当时开发的收获机器人样机几乎都需要有人的参与,因此只能算是半自动化的收获机械。采用的收获方式主要是机械震摇式和气动震摇式,其缺点是果实易损,效率不高,特别是无法进行选择性的收获。 从20世纪80年代中期开始,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,以日本为代表的西方发达国家,包括美国、英国、法国、荷兰、以色列、西班牙等国家,都在水果采摘机
摘要 在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业柑橘采摘机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业柑橘采摘机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业柑橘采摘机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。 本文将设计一台五自由度的工业柑橘采摘机器人,用于给采摘水果。首先,本文将设计柑橘采摘机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建柑橘采摘机器人的结构平台;在此基础上,本文将设计该柑橘采摘机器人的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计,重点加强控制软件的可靠性和柑橘采摘机器人运行过程的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测柑橘采摘机器人的各个关节的运动情况、柑橘采摘机器人的示教编程和在线修改程序、设置参考点和回参考点。 关键词:柑橘采摘机器人,示教编程,伺服,制动
ABSTRACT In the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take high work strength, and most of these robots work in playback way. In this paper I will design an industrial robot with four DOFs, which is used to carry material for a punch. First I will design the structure of the base, the big arm, the small arm and the end manipulator of the robot, then choose proper drive method and transmission method, building the mechanical structure of the robot. On this foundation, I will design the control system of the robot, including choosing DAQ card, servo control, feedback method and designing electric circuit of the terminal card and control software. Great attention will be paid on the reliability of the control software and the robot safety during running. The aims to realize finally include: servocontrol and brake of the joint, monitoring the movement of each joint in realtime, playback programming and modifying the program online, setting reference point and returning to reference point. KEY WORDS: robot, playback, servocontrol, brake
水果采摘机械手的设计 摘要:机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物 件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自 动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、 电子轻工和原子能等部门。由于机械臂在各行各业中得到了愈来愈广泛的应用, 机械臂控制的多样化、复杂化的需要也随之日趋增多。作为当今科技领域研究的 一个热点,提高机械臂的控制精度、稳定性、操作灵活性对于提高其应用水平有 着十分重要的意义。在原有机械手上进行PLC等设计可使机械手实现自动化定位 控制丶自动化工作等。通过重新编程序可使其变成多功能机器。 关键词:采摘;机械手;水果 1、机械手的发展趋势 机械手是集机械、电子、控制、计算机、信息等多学科交叉综合,它的发展 和进步依赖并促进相关技术的发展和进步。因此,机械手的主要发展方向如下:机械结构向模块化、可重构化发展。例如关节模块中的伺服电机、减速机、 检测系统三位一体化:由关节模块、连杆模块用重组方式构造机器人整机;国外 已有模块化装配机器人产品问市。 机械手控制系统向基于pc机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。 机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感 器外,装配、焊接机械手还应用了视觉、力觉等传感器,而遥控机械手则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制。 虚拟现实技术在机械手中的作用从仿真、预演向用于过程控制发展,如使遥 控机械手操作者产生置身于远端作业环境中的感觉来操纵机械手 2、设计水果采摘机械手的作用 据统计,2017年全国水果总产量(不含瓜果类,下同)达到1.82亿吨,比1978年增长26.7倍,年均增速8.9%。自1994年以来,我国水果总产量稳居世界第一。但目前存在果园人力不足、采摘效率低、有时因为采摘不及时水果坏掉、 果子结在高处人工面临着高空采摘的危险等问题,而一切采摘过程目前都由人工 采摘,在我国机械化的采摘目前处于空白期,即使有机械化机器的投入和使用也 是个别体,且机器的投入成本往往很大,果农无法承担此高昂的成本使用该器械。 果实的采摘是一个季节性较强和劳动密集型的工作,采摘作业所用劳动力占 整个生产过程所用劳动力的33% ~50%,采摘作业比较复杂,季节性很强,若使 用人工采摘,不仅效率低、劳动量大,而且容易造成果实的损伤。使用采摘机械 不仅提高采摘效率,而且降低了损伤率,节省了人工成本,提高了果农的经济效益。 目前而言我国是世界水果生产大国,但在果园管理程度不高(尤其是机械化 采摘果品)由于人口老龄化和农村劳动力越来越少,在单调、繁重、危险的果实 采摘作业上急需高效、通用、低成本的采摘技术,而智能化技术的出现和应用让 人们的生活变得更加方便快捷,与传统机械臂相比,拥有智能化,仿生化等技术 的机械臂操作起来更加简单方便快捷,运用起来也更加灵活多变,智能制造技术 是未来先进制造技术发展的必然趋势,是抢占产业发展的制高点必胜法则。 3、水果采摘机械手的整体方案设计
枸杞采摘机的设计 摘要:我国枸杞传统的采摘方法为手工采摘,采摘速度慢效率低,采摘缓冲期短,劳动力需求量巨大,这些条件严重制约着枸杞产业的发展。因此我们设计了一种枸杞采摘机,大大减轻枸杞采摘的劳动强度,提高了作业效率,解放了劳动力。本文对枸杞采摘机的传动及收集设计进行了描述。 关键字:枸杞采摘机;传动;收集 1.引言 枸杞是一种治疗和养生的重要中药材,同时也是可以作为营养丰富的水果使用。在我国青海、宁夏、新疆精河县以及以及太行山区大量种植。但是由于枸杞果实为浆果、果皮薄、含水量大,在采摘过程中很容易损伤,因此枸杞采摘一直以来主要以人力为主。现有采摘机设计及其产品不能适应各地区采摘需求,有着采摘效率低,收集复杂,机器过于沉重的缺点。我们结合枸杞树的长势的结构特点和采摘的要求,设计出一种枸杞采摘机,其结构简单、便于携带、带有收集装置,重点解决采摘率及收集的问题。 2.枸杞采摘机的整体结构及工作原理 2.1枸杞采摘机的整体结构 采摘机的整体结构如图1所示,主要由蓄电池、电动机、齿轮箱、软轴、收集箱、采摘头组成。 1.小车外壳 2.蓄电池 3.电动机 4.皮带轮 5.皮带 6.齿轮箱 7.软轴 8.收集管 9.采摘头 图 1 枸杞采摘机整体结构图 2.2枸杞采摘机的工作原理 采摘机整体为双层设计,分上下两层,上层为收集箱,下层为机箱。采摘机整体结构如图1所示,采摘机工作时,动力由电动机1通过皮带5传送到皮带轮4,皮带轮4将动力通过轴承传送到齿轮箱6,齿轮箱6将动力软轴7输送至采摘头9,采摘头9上的收集装置收集枸杞果实通过收集管8回到小车,完成收集。 3.关键部件的设计 3.1 动力传输装置
一种小型高空电动水果采摘机械手装置设计 发表时间:2018-10-17T09:46:53.860Z 来源:《基层建设》2018年第27期作者:祝怀志沈璐鹏叶国江 [导读] 摘要:水果采摘机器人在我国起步晚、发展缓慢,没有系统的方法用以设计采摘机械手,本文根据柑橘生产活动中完成果实采摘整个过程的的具体条件,首先运用所学知识进行机构尺寸的设计;然后创新设计内嵌式关节采摘机械手所有零部件的具体合理尺寸;接着根据机械手的工作方式选择合理的连接方式并通过创建合理约束完成机械手的装配。 衢州职业技术学院浙江衢州 324000 摘要:水果采摘机器人在我国起步晚、发展缓慢,没有系统的方法用以设计采摘机械手,本文根据柑橘生产活动中完成果实采摘整个过程的的具体条件,首先运用所学知识进行机构尺寸的设计;然后创新设计内嵌式关节采摘机械手所有零部件的具体合理尺寸;接着根据机械手的工作方式选择合理的连接方式并通过创建合理约束完成机械手的装配。 关键词:柑橘采摘机械手;内嵌式关节;机械设计 1.引言 近年来,随着全球经济的发展,果蔬供应需求日益增大。作为一个多类型果蔬生产的大国,果蔬的生产对全国的农业乃至国家的经济发展有着不过或缺的重要作用。为了适应时代的需求,在国家的鼓励号召下,全国大部分的果蔬生产已经成功进行了转型,由原来的小型散户种植变成了更加科学化,规模化,可控化的果蔬种植园,而全国果蔬的生产总量也得到了量和质的突破。可是相对经营方式的成功转型,在果蔬生产活动中,几乎占整个生产活动工作量的80%消耗于水果采摘过程,在很大程度的扼制着全国果蔬经济的发展。大量人力资源的投入不仅生产率没得到保障,就连生产质量也是不尽人意,而且艰苦的工作条件常使采摘人员工作中图中发生意外,导致人员受伤。为了提高果蔬采摘的效率,解放劳动力,保证水果采摘的质量,设计一款轻巧,灵便,满足工作条件的水果采摘机械手变得迫切且意义重大。 2.机械手设计 机械手是人们为了完成某些特定的生产活动,通过观察人类手臂的移动和手掌的抓举仿生设计出来的可控的机械系统,其一般包括由实现灵活移动的移动机构(手臂)和实现最终生产活动的执行末端(手掌)组成。机械手的灵活程度在很大程度上取决于机械手的自由度数和控制系统。自由度越多的机械手一般运动起来更加的灵活,人类的整个手部就是一个具有二十多个自由度的精巧结构。不过自由度越多,机械手控制起来就会变得越复杂,而人类之所以能够灵活的使用自己的手,是因为有上亿神经系统的精密控制。所以在设计机械手时,合理的选择机械手的自由度和完善控制系将决定它最终的成败。 2.1柑橘采摘机械手的系统构成 为了实现柑橘果实采摘活动,并在满足工作条件的情况下有尽可能大的工作空间,机械手必须满足俯仰,旋转等运动,所以机械手必须是多自由度的。图1为其简易结构示意图。 图1结构示意图 在图2-1中,1是控制计算机;2是底座;3是腰部;4是大臂;5是小臂。在采摘过程中,机械手在伺服电机的带动下,通过腰部的旋转,大小臂的俯仰将机械手的末端定位到所需要采摘的柑橘位置,然后通过末端的执行机构实现果实的采摘。 2.2 柑橘采摘机械手的材料选定 在柑橘采摘的整个生产活动中,由于机械臂并不需要受很大的力,为了更好的适应复杂的果园环境整体机构尽量灵巧轻便,另外考虑到制造的成本问题,综上几点,选择密度相对较低,但强度较高的铝合金为制造机械手的材料。以下是几种型号铝合金的性能参数表1。表1 铝合金性能参数表 为了满足机械臂对强度的要求以及尽可能的是机械手轻巧,优先选牌号为6061的铝合金作为机械手的材料。 2.3 基于果园环境的机械手CAD模拟 模拟原则:假设机械手是安装在履带式的行走机构上,在采摘过程中,当行走机构带着机械手靠近果树边沿时,要使机械手能成功采摘到果树上的所有成熟果实,在腰部旋转机构固定时,必须使其工作空间能够覆盖其半剖面,如图2。 2.4 机械手关节处伺服电机 设计一种将伺服电机内嵌于关节内部的机械手,不仅可以大幅减小机械手的体积使机械手整体看起来更加小巧精简,而且可以避免外
水果采摘机设计说明书 发表时间:2019-01-07T15:13:12.183Z 来源:《基层建设》2018年第33期作者:冯庆1 王胜2 [导读] 摘要:采用UG软件进行装置的三维造型,设计了一款便携式水果采摘机,经过试验仿真和实际调试,将实物制作分为伸缩手柄和采摘装置两大部分。 1.浙江省衢州中等专业学校 324000; 2.浙江省衢州中等专业学校 324000 摘要:采用UG软件进行装置的三维造型,设计了一款便携式水果采摘机,经过试验仿真和实际调试,将实物制作分为伸缩手柄和采摘装置两大部分。实践表明,该采摘机运用了简单机械原理,将机械传动机构作用于伸缩手柄与橘子的切割采摘,达到了协助果农方便快捷的采摘上顶端橘子的目的。 关键词:说明书、研究背景意义、设计方案、前景 日常生活中,果农需要通过爬树才能采摘果树上顶端的水果,有很大的危险性,这也是果农面临的数大难题之一。对此我们专门设计了一款针对上顶端成熟水果采摘的装置。本新型采摘器能够做到让果农在地面进行上顶端水果的采摘,提升了水果采摘时的效率,并使果农的工作环境更加安全。基本思路:由一手握紧伸缩手柄以通过按钮控制手柄高度;另一手则以另一按钮控制直流电机,通过旋转刀片以使果柄被割断,最终达到采摘水果的目的。从而实现果农采摘水果方便快捷的需求以及使作业环境更安全的目的。 该采摘机主要由伸缩手柄和采摘装置两大部分组成,按照运动方式的不同,采摘机的功能大致归纳如下: 1:伸缩手柄的伸缩运动。握把上装有控制电机的按钮可以直接控制笔式直线的伸缩运动从而控制采摘高度的改变。 2:采摘装置的运动:利用旋转桶和运动刀片配合剪切树枝。 一.研制背景及意义 需求:我国是世界第一大水果生产国,也是世界第一大水果消费国。水果采摘作业是林果业生产中非常重要的环节,水果采摘机械使用可以解决人工采摘时所出现的劳动强度大、效率低、成本高等不足。但我国水果采摘作业机械化程度低,因此水果采摘作业对辅助人工采摘机械有广泛的需求。人工采摘劳动强度大,而采用辅助人工采摘机械采收能减轻人们的劳动强度、节省成本、提高效率,并提供更多利润。加之未来人口老龄化趋势,人工成本必会上升,因此辅助人工采摘必将具有巨大的经济效益和广泛的应用前景。 国内外相关研究现状 1.1国内果园采摘机械现状 中国是世界上最大的水果出产国,居全球13个产量超1000万吨的国家之首。截止2015年末,全国水果(含瓜果)总面积1536.71万公顷,较“十二五”期初增加143.38万公顷,增长10.3%,年均增长1.6%。其中,园林水果种植面积1281.67万公顷,比“十二五”期初增加127.28万公顷,增长11.03%年均增长1.62%。水果采收作为果园生产全过程中的一个重要环节.具有季节性强和劳动密集型的特点。所用劳动力占整个生产过程所用劳动力的35%~45%。目前我国的水果采摘绝大部分还是以人工采摘为主。采摘作业比较复杂,季节性很强。若使用人工采摘,不仅效率低、劳动量大.而且容易造成果实的损伤,如果人手不够不能及时采摘还会导致经济上的损失。 二.结构设计方案 此款辅助人工水果采摘装置主要由伸缩手柄和采摘装置两大部分构成 伸缩手柄:由一个下握把,两组固定螺栓螺母和一个笔式直线电机构成。 下握把是用?65×420的尼龙棒经过车床进行车削并用钻床进行定位打孔。笔式直线电机外径?33,电机中的伸缩杆形成为0.5米,电机极限长度可达1.5米,推力8N。整个伸缩手柄中最重要的组成部分是笔式直线电机,直线电机可以将电能转换成直线运动机械能,而不需要任何中间转换机构的传动装置。伸缩手柄的目的是采摘果树上不同高低位置的不能人工采摘的果实,在笔试直线电机的作用下,将电能转换成直线运动机械能,伸缩手柄可以做到自由伸缩,根据果实的不同高低位置调节长短。下握把主要起辅助作用,它方便人的采摘操作,并且上面有按钮可控制直线电机的伸缩和遥控采摘装置的刀片运动。 直线电机是一种将电能转换成直线运动机械能,而不需要任何中间转换机构的传动装置。其运动速度快效率高,相对很多其他辅助人工水果采摘装置来说,笔式直线电机的加入,使得装置成本较低,性比价大大提高 图 1水果采摘机整体图 采摘装置: 采摘装置整体是一个采摘桶,主要由旋转桶和电机组成,旋转桶由刀片运动配合旋转旋转摘果,电机主轴逆时针旋转,从而带动旋转桶逆时针旋转。进一步达到高效采摘,且果实树枝的损伤率被降低。
苹果采摘简易机械手设计说明书 一、引言 近年来,随着农业产业机构的调整,林果生产已经成为很多地区经济发展和农民增收的支柱产业,随着种植面积的不断扩大,果园规模化发展和规范化管理的要求日益提高,从而果园机械化日益重要。果园收获机械的发展,可以减轻果农的劳动强度,提高生产效率,节约劳动成本,提高经济效益。由于我国果园作业机械研究起步较晚,基础相对较差,因此,果园作业机械化程度和欧美等国家还是存在差距。所以,针对我国各地林果生产特点研究相应的作业机械,对林果产业的发展有重要意义。 我国是世界第一大水果生产国,也是世界第一大水果消费国。水果种植业的迅速发展提升了果园机械的市场需求。采摘作业所用劳动力占整个生产过程所用劳动力的33%~50%,目前我国的水果采摘绝大部分还是以人工采摘为主。采摘作业比较复杂,季节性很强,若使用人工采摘,不仅效率低、劳动量大,而且容易造成果实的损伤,如果人手不够不能及时采摘还会导致经济上的损失。使用采摘机械不仅提高采摘效率,而且降低了损伤率,节省了人工成本,提高了果农的经济效益,因此提高采摘作业机械化程度有重要的意义。随着现代农业机械化生产,大面积的种植果树,农民朋友的农产品获得丰收,果实的采摘问题也凸显而出,在面对果树高而无法采摘造成了苹果的摔落,因而这些苹果无法上市进行出售,为解决高空采摘苹果难,故设计此苹果采摘简易机械手来解决此问题。 二.项目设计的内容 (1)果蔬收获机器人作业环境和工作对象的特殊性 工业领域是机器人技术的传统应用领域.由于在工业生产中,机器人的工作位置 和障碍往往都能够事先预知,因此机器人的性能能得到很好的体现。和工业机器人相
水果采摘装置设计
水果采摘装置设计 0文献综述 0.1水果采摘实现机械化的必然趋势 在水果的生产作业中,收获采摘是整个生产中最耗时最费力的一个环节。水果收获期间需投入的劳力约占整个种植过程的50%~70%。采摘作业质量的好坏直接影响到水果的储存、加工和销售,从而最终影响市场价格和经济效益。水果收获具有很强的时效性,属于典型的劳动密集型的工作。但是由于采摘作业环境和操作的复杂性,水果采摘的自动化程度仍然很低,目前国内水果的采摘作业基本上还是手工完成。在很多国家随着人口的老龄化和农业劳动力的减少,劳动力不仅成本高,而且还越来越不容易得到,而人工收获水果所需的成本在水果的整个生产成本中所占的比例竟高达33%~50%。高枝水果的采摘还带有一定的危险性。因此实现水果收获的的机械化变得越来越迫切,发展机械化的收获技术,研究开发水果采摘机器人具有重要的意义。 研究和开发果蔬收获的智能机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本、保证新鲜果蔬品质,以及满足作物生长的实时性要求等方面都有着重要的意义。采摘机器人是未来智能农业机械化的发展方向,具有广阔的应用前景。2004年11月1日颁布施行的《中华人民共和国农业机械化促进法》还明确规定国家采取措施鼓励,扶持农业机械化的发展,机械采摘取代手工作业是必然的发展趋势。 0.2国外水果机械化采摘装置研究进展及现状 水果的机械化收获技术已有40余年的研究历史。收获作业的自动化和机器人的研究始于20世纪60年代的美国,1968年美国学者Schertz和Brown首次提出应用机器人技术进行果蔬的收获,当时开发的收获机器人样机几乎都需
水果采摘机械手装置设计与仿真 摘要 近年来,随着全国经济的持续发展,人们对果蔬的需求越来越大。在我国的果蔬生产中,柑橘生产所的占比重日益增大。而在整个柑橘生产活动中,柑橘的采摘所占的工作量十分巨大。除此之外,水果采摘质量的好坏还将直接影响到水果的保鲜储藏,运输配送等后续工作,并最终将严重影响到经济效益。如果继续延续原始的手工采摘,不仅工作环境十分的艰苦,效率低下,而且水果采摘质量也得不到保障,更甚至时有采摘工作者在采摘过程中因为环境的复杂不小心从树上摔下而受伤的事故发生。为了适应当代果蔬经济的发展,设计一种多自由度,满足工作空间的小型柑橘采摘机械手对实现农业自动化和提高经济效益具有重要意义。 根据柑橘生产活动中完成果实采摘整个过程的的具体条件,首先运用所学知识进行机构尺寸的设计;然后创新设计内嵌式关节采摘机械手所有零部件的具体合理尺寸;再按照设计的零件图通过Pro/E三维造型出机械手的所有零部件;接着根据机械手的工作方式选择合理的连接方式并通过创建合理约束完成机械手的装配;最后通过选用Pro/E 中的机构模式,经过旋转轴的自定义,伺服电机的添加,定义初始条件等完成机械手的运动仿真。 关键词:柑橘采摘机械手,内嵌式关节,Pro/E三维造型,运动仿真
Abstract In recent years, with the continuous development of economy, the proportion of citrus production in fruit and vegetable production is growing in our country. In the entire citrus production activities, the workload of citrus picking is very big. What’s more, the quality of fruit picking will directly affect the fruit storage, transportation and other follow-up work ,which eventually has serious influence on the economic benefit. If we continue to use the original manual picking, not only working environment is very difficult, working inefficient, but also the quality of fruit picking is not guaranteed .what’s worse, the fruit picking workers maybe fell from the trees and injured accidentally because the environment is very complex in the process of picking . In order to adapt to the development of contemporary economic fruit and vegetable, it is of great significance to agricultural automation realized and improving the economic benefit that designing a kind of small citrus picking manipulator with the features of multi-degree of freedom and satisfied the working space. According to the specific conditions of the whole process of fruit picking in citrus production activities, at first ,using the acquired knowledge to creatively design all parts of embedded citrus picking manipulator joints with reasonable size. Then according to the design of the part drawing shapes all parts of the manipulator through the Pro/E 3d modeling software. Next choosing the reasonable connection according to the workings of a manipulator and creating a reasonable constraint to complete the assembly of the manipulator. Finally ,through choosing mechanism model in Pro/E, after the axis of rotation of the custom, the adding of the servo motor and defined the initial conditions to complete the motion simulation of the manipulator. Keywords: citrus picking manipulator, embedded joints, Pro/E 3d modeling , motion simulation