大功率液压弹簧操动机构
- 格式:pdf
- 大小:405.67 KB
- 文档页数:9
操作维护使用说明书液压弹簧操动机构出版物号: 1HDH 118 042 en Rev. B型号:HMB-4/-81 HDH 118 042 P1ABB Calor Emag Hochspannung GmbH概述HMB-4/-8型液压弹簧操动机构:概述概述1.产品说明2.运输、储存、安装与调试3.运行与维护4.部件目录表5.附录HMB-4/-8型液压弹簧操动机构目录1 概述............................................ 1-01.1 前言 .......................................... 1-11.1.1 保证书................................... 1-11.1.2 版权..................................... 1-1 1.2 安全规则....................................... 1-11.2.1 注意事项.................................. 1-2 1.3 有效期......................................... 1-2 1.4 型号的说明..................................... 1-21.5 铭牌........................................... 1-32.0 产品说明....................................... 2-0 2.1 HMB-4/-8操作机构装置设计..................... 2-12.1.1 操作机构部件模块......................... 2-12.1.2 操作机构装置............................. 2-12.1.3 操作机构HMB-4/-8的优点.................. 2-23 运输、存储、安装和试运行........................ 3-0 3.1 运输 .......................................... 3-1 3.2 存储........................................... 3-23.2.1 包装..................................... 3-23.2.2 存储区的技术要求 ........................ 3-2 3.3 安装........................................... 3-2 3.4 试运行......................................... 3-33.4.1 手动操控操作机构 ........................ 3-43.4.2 低速转换操作............................. 3-53.4.3 解除合闸状态互锁 ........................ 3-63.4.4 存储模块 ................................ 3-7 3.5 可选择的调整程序............................... 3-83.5.1 调整操作速度............................. 3-84 运行和维护 ...................................... 4-0 4.1操作指南 ....................................... 4-14.1.1 机泵的启动和检查内部的密封性............. 4-14.1.2 退出维修................................. 4-34.1.3 油位.................................... 4-4 4.2 故障排除....................................... 4-5 4.3 检查项......................................... 4-6 4.4 处理........................................... 4-75 零件明细单....................................... 5-0 5.1 备件,通用 ..................................... 5-16 附录 .......................................... 6-0 6.1详细的技术资料 ................................. 6-16.1.1 HMB-4.x.................................. 6-16.1.2 HMB-8.x................................... 6-2 6.2 螺杆的紧固扭矩.................................. 6-3 6.3 实用物品........................................ 6-3 6.4 尺寸图表........................................ 6-3HMB-4/-8型液压弹簧操动机构原始附图列表附图 1.5-1:铭牌...................................... 1-3 附图 2.1-1:操作机构装置HMB-4/-8...................... 2-3 附图 2.1-2:操作机构装置HMB-4/-8..................... 2-4 附图 3.1-1:运输的操作机构装置HMB-4/-8................ 3-1 附图 3.4-1:检查储能活塞的状态/合轴环 ............... 3-3 附图3.4-2:控制模块 .................................. 3-4 附图3.4-3:解除合闸状态闭锁 .......................... 3-6 附图 3.4-4:泵用电动机 ................................ 3-7 附图3.5-1: 控制模块 ................................. 3-8 附图4.1-1:测量内紧程度............................... 4-2 附图4.1-2:释放盘簧组合 .............................. 4-3 附图4.1-3:油位计视镜中的油位,操作机构的压强 ....... 4-4 附图4.3-1:辅助开关垫片和转向装置保护的润滑............ 4-6 附图6.4-1:尺寸图表1HDH 115 001,供电部分HMB-4......... 6-4 附图6.4-2:尺寸图表1HDH 115 002,扩展的供电部分HMB-4...6-5 附图6.4-3:尺寸图表1HDH 115 000,操作机构装置HMB-4/-8... 6-6 附图6.4-4:尺寸图表1HDH 115 003,供电部分HMB-8.........6-7 附图6.4-5:尺寸图表,扩展供电部分HMB-8................. 6-81 概述内容1.1前言....................................... 1-11.1.1 保证书................................. 1-11.1.2 版权................................... 1-11.2 安全规程..................................... 1-11.2.1注意事项............................... 1-21.3 有效性....................................... 1-21.4 型号的说明................................... 1-21.5铭牌......................................... 1-3ABB Calor EmagHochspannung GmbHPostfach 90 12 20D-63457 HanauTel:+49(0)6181/509-379Fax:+49(0)618/509-4951.1 前言这本操作说明时经过精心编制而成的。

弹簧操动机构与永磁操动机构的比较弹簧操动机构与永磁操动机构的比较3.1 动作原理和结构真空断路器永磁机构原理图见图1,弹簧机构见图2。
目前用于中压断路器操动机构主要有电磁式和弹簧式两种。
电磁操动机构在真空断路器发展初期得到了广泛应用,这是由于电磁操动机构较好地迎合了真空灭弧室的要求:一是开距小(8-25mm),二是在合闸位置需要大的操动力(2000-4000N/相)。
然而电磁操动机构也存在不容忽视的缺点,磁路电感L在合闸过程中变化较大,产生反电动势,从而抑制了合闸线圈电流的增大,而且这种抑制作用随着合闸速度增加而增强。
相比之下,弹簧操动机构采用于手动或小功率交流电动机储能,其分合闸速度不受电源电压波动影响,相当稳定,能够获得较高的分合闸速度,能实现快速自动重合闸操作,在一定程度上克服了电磁操动机构的缺点。
然而弹簧操动机也存在以下缺点:完全依靠机械传动,零部件数量多,一般弹簧操动机构有上百个零件,且传动机构较为复杂,故障率较高,运动部件多,制造工艺要求较高。
另外,弹簧操动机构的结构复杂,滑动摩擦面多,而且多在关键部位,在长期运行过程中,这些零件的磨损、锈蚀以及润滑剂的流失、固化等都会导致操作失误。
近年来,一种用于中压真空断路器的永磁保持、电子控制的电磁操动机构(简称永磁机构)备受关注。
和传统的断路器操动机构相比,永磁机构采用了一种全新的工作原理和结构,工作时主要运动部件只有一个,无需机械脱扣、锁扣装置,故障源少,具有较高的可靠性。
3.2 操动机构与真空断路器的配合3.2.1 力-行程特性多年来,真空断路器一直在努力追求着一种完美操动的机构:结构简单,寿命长,可靠性高,可以用小功率交流电源操作,出力特性与真空断路器的反力特性很好地匹配,能给出稍低的合闸速度和较高的分闸速度的操作机构。
真空断路器触头行程很小,合闸过程中在触头接触前只需要很小的驱动力,一旦触头闭合,就需要较大的驱动力,来压缩触头弹簧以获的足够的触头压力。
真空断路器的操动机构主要有三种类型:电磁操动机构、弹簧操动机构及永磁操动机构。
电磁操动机构由一个电磁线圈和铁心,加上分闸弹簧和必要的机械锁扣系统组成,结构简单、零件数少、工作可靠、制造成本低。
同时螺管电磁铁的出力特性容易满足真空断路器合闸反力特性的要求。
其缺点是合闸线圈消耗的功率太大,因而要求配用昂贵的蓄电池,加上电磁机构的结构笨重,动作时间较长。
电磁操动机构出现最早,但目前用量趋于减少。
弹簧操动机构由弹簧贮存分合闸所需的所有能量,并通过凸轮机构和四连杆机构推动真空灭弧室触头动作。
其分合闸速度不受电源电压波动的影响,相当稳定,通过调整弹簧的压力能够获得满足要求的分合闸速度。
其缺点是机械零件多(达160多个),零件的材质、加工精度和装配精度都直接影响机构的可靠性。
弹簧机构的出力特性,基本上就是储能弹簧的释能下降特性,为改善匹配,设计中采用四连杆机构和凸轮机构来进行特性改变。
目前弹簧操动机构技术已经成熟,因此用量较大。
永磁机构是一种全新的操动机构,它利用永磁保持、电子控制、电容器储能。
其优势是结构简单、零件数目少,工作时的主要运动部件只有一个,无需机械脱扣、锁扣装置。
永磁机构分为两种类型:单稳态永磁机构和双稳态永磁机构。
永磁机构尚需经受考验,需解决好电容器的寿命问题、永久磁铁的保持力问题及电子器件的可靠性等问题。
目前其用量还不大。
真空断路器主要结构:真空断路器主要包含三大部分:真空灭弧室、电磁或弹簧操动机构、支架及其结构图他部件断路器采用三相支柱式结构,具有开断性能稳定可靠、无燃烧和爆炸危险、免维修、体积小、重量轻和使用寿命长等特点。
断路器采用全封闭结构,密封性能好,有助于提高防潮、防凝露性能,特别适用于严寒或潮湿地区使用。
三相支柱及电流互感器采用进口户外环氧树脂固体绝缘,或采用户内环氧树脂外包有机硅橡胶固体绝缘;具有耐高低温、耐紫外线、耐老化等特点。
操动机构采用小型化弹簧操动机构,储能电机功率小,分合闸能耗低;机构传动采用直动传输方式,零部件数量少,可靠性高。
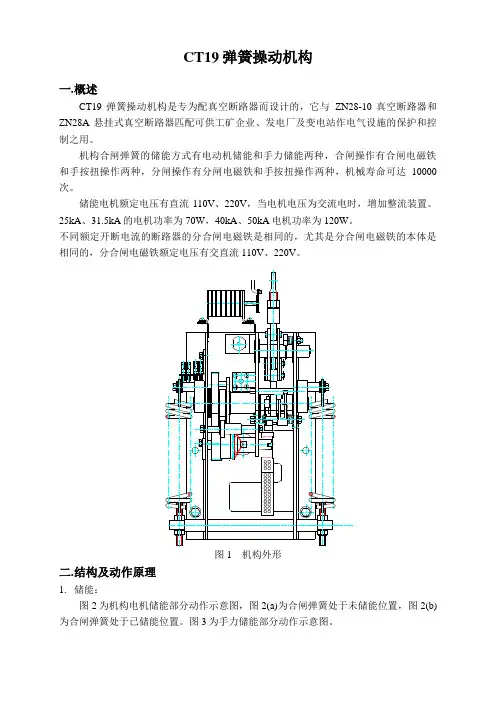
CT19弹簧操动机构一.概述CT19弹簧操动机构是专为配真空断路器而设计的,它与ZN28-10真空断路器和ZN28A悬挂式真空断路器匹配可供工矿企业、发电厂及变电站作电气设施的保护和控制之用。
机构合闸弹簧的储能方式有电动机储能和手力储能两种,合闸操作有合闸电磁铁和手按扭操作两种,分闸操作有分闸电磁铁和手按扭操作两种,机械寿命可达10000次。
储能电机额定电压有直流110V、220V,当电机电压为交流电时,增加整流装置。
25kA、31.5kA的电机功率为70W,40kA、50kA电机功率为120W。
二.结构及动作原理1.储能:图2为机构电机储能部分动作示意图,图2(a)为合闸弹簧处于未储能位置,图2(b)为合闸弹簧处于已储能位置。
图3为手力储能部分动作示意图。
图2 机构电机储能部分动作示意图a. 电机储能过程如下:如图2示电机通过小齿轮2带动大齿轮3按图示方向转动,大齿轮与储能轴7是空套的,因此,在储能开始时电机只带动大齿轮作空转,当转到固定在大齿轮上的拨叉9与固定在储能轴上的驱动块4卡上以后,大齿轮就通过驱动块带动储能轴也按图示方向转动,挂簧拐臂6与储能轴是键联结,储能轴的转动带动了挂簧拐臂也按图示箭头方向转动,将合闸弹簧15拉长,当合闸弹簧过中后,固定在与储能轴键联结的凸轮8上的滚轮5就紧压在定位板13上,将合闸弹簧的储能状态维持住,储能结束。
在挂簧拐臂过中的同时,一方面挂簧拐臂推动行程开关切断储能电机电源,另一方面固定在中侧板与左侧板之间的轴承14将驱动块上的拨叉顶起保证驱动块与大齿轮可靠脱离,这样,即使电机继续转动也不会将图3 手力储能部分动作示意图(a )合闸弹簧未储能 (b )合闸弹簧已储能b.手力储能过程如下,图3中用专用摇把驱动小锥齿轮3,小锥齿轮3再驱动与之相啮合的锥齿轮5,锥齿轮5带动直齿轮6,驱动大齿轮7按图示方向转动,以后的过程跟电机的储能一样。
由于手力储能过程不是连续进行的,所以与大齿轮相啮合的小齿轮9上装有单向轴承,用来防止储能过程中大齿轮在合闸簧拉力下反转储不上能。
水龟站机电技术Mechanical & Electrical Technique of Hydropower Station第44卷第6期2021年6月Vol.44 No.6Jun.202150500 kV 断路器操动机构打压超时故障分析李叔麟,焦东围,钟涛(中国长江电力股份有限公司三峡水力发电厂,湖北宜昌443000)摘 要:500 kV 电压等级断路器液压碟簧机构易打压超时或打压频繁的现象,不利于电气设备的安全稳定运行。
针对这一问题,通过对500 kV 液压碟簧操动机构的工作原理的介绍、典型的500 kV 断路器操动机构打压超时故障 的分析,详细解释了其打压超时故障的原因,并制定了解决方案,以便于及时、有效地排除故障,提高处理效率,缩短设备故障停运时间,减少事故的发生。
关键词:HMB 型液压碟簧机构;打压超时;故障处理;案例分析中图分类号:TM561 文献标识码:B 文章编号:1672-5387 (2021)06-0050-04DOI : 10.13599/ki.ll-5130.2021.06.0141引言随着社会的高速发展,人类用电需求不断增大。
维持电力系统的安全运行是当前的研究热点。
断路器在电力系统中起着关键作用,其在长时间运行中, 会出现各种原因导致的操动机构打压超时故障。
而现场检修时间长,工作量大,严重影响电力系统供电 的可靠性,为了能够缩短检修时间和检修过程,熟悉了解操动机构打压超时的情况,对设备检查和分析 将起到关键作用。
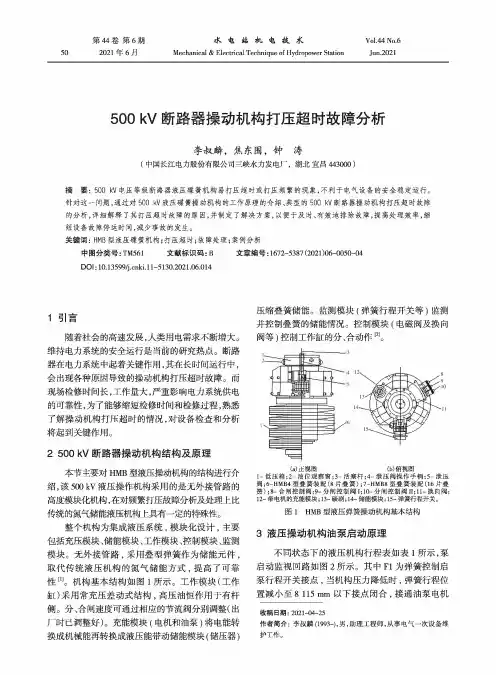
2 500 kV 断路器操动机构结构及原理本节主要对HMB 型赵操动机构的结构进行介绍,该500 kV 液压操作机构采用的是无外接管路的 高度模块化机构,在对频繁打压故障分析及处理上比传统的氮气储能液压机构上具有一定的特殊性。
整个机构为集成液压系统,模块化设计,主要包括充压模块、储能模块、工作模块、控制模块、监测 模块。
无外接管路,采用叠型弹簧作为储能元件,取代传统液压机构的氮气储能方式,提高了可靠性叫 机构基本结构如图1所示。
高压断路器中的弹簧操动机构刘唯2015.4摘要:本文讨论了断路器操动机构的功能,总结并比对了目前主流弹簧操动机构的实现方式,也介绍了各种结构的优缺点。
列举了断路器上弹簧机构的各种布局方式,从控制,安全,维护及发展的角度谈了个人看法。
关键词: 高压断路器弹簧操动机构目录0引言 (1)1操动机构的种类 (1)2弹簧操动机构的功能 (2)3断路器弹簧操动机构结构 (3)3.1储能结构的分类 (4)3.1.1储能操作的能量只用于合闸过程43.1.2储能操作的能量分别用于合闸或分闸过程4 3.2储能到位离合及状态保持结构 (5)3.3合闸驱动结构 (5)3.3.1不具备自由脱扣的结构63.3.2具备自由脱扣功能的结构6 3.4合闸状态保持结构 (6)3.4.1过冲复位保持结构63.4.2复位保持结构73.4.3就绪保持结构7 3.5储能电机的减速机构 (7)3.5.1齿轮箱结构73.5.2蜗轮蜗杆结构73.5.3棘轮结构7 3.6弹簧机构的联锁装置 (8)3.6.1硬联锁83.6.2软联锁83.6.3PF接点9 4断路器弹簧操动机构的布局 (9)5断路器的控制与保护 (10)6断路器操动机构的安全锁 (11)7断路器弹簧操动机构的维护 (11)8断路器弹簧操动机构的发展 (5)0引言笔者最近几年,接触了一些弹簧操动机构,有些认识,愿与大家分享。
文中没有计算,没有公式,略显没有深度,请高手一笑而过。
文中试图将千差万别的机械结构进行分类,会有遗漏,但终归是一次尝试。
也试图将其优缺点做一比较,必不完全,但肯定会有些说法。
有些机构,并不能完全理解其博大精深,不正之处,也还望请指正。
请到新浪微博《高压断路器中的弹簧操动机构》交流贴留言。
链接如下:/u/2437510622。
原文下载请搜百度文库。
文中涉及到一些机构名称,如ABB公司的EL弹簧操动机构,以下简称EL机构,主要用于VD4断路器;Schneider公司的P2弹簧操动机构,以下简称P2机构,主要用于Evolis断路器和Masterpact断路器;Schneider公司的RI弹簧操动机构,以下简称RI机构,主要用于Ev12S断路器上;Schneider公司的RT弹簧操动机构,以下简称RT机构,主要用于Premset 开关柜上;Schneider公司的FK2-01弹簧操动机构,以下简称FK2机构,主要用于HVX断路器上;三菱的BH2弹簧操动机构,以下简称BH2机构,主要用于VPR 断路器上;天水长城开关厂的GSL01弹簧操动机构,以下简称GSL01机构,主要用于EVH1断路器;以下断路器上用的弹簧操动机构不知道名字,只能用断路器名字称呼,VS1断路器上的弹簧操动机构,以下简称VS1机构;厦门华电开关有限公司的VEP断路器上的机构,以下简称VEP机构;Siemens公司的Sion断路器上采用的机构,以下简称Sion机构;东芝公司的VK断路器上采用的机构,以下简称VK机构。
1断路器用大功率液压操动机构 张旭宏 陈保伦 (西安西开高压电气股份有限公司,陕西,西安,710077) 摘要:本文介绍了800kVGIS和双断口罐式断路器用CY15型大功率液压弹簧操动机构的产品结构及工作原理、主要技术参数、贮能碟簧特点及计算和缓冲特性计算及对可靠性的影响。 关键词:液压弹簧操动机构 碟形弹簧 缓冲特性 产品结构 工作原理 0 引言 西安西开高压电气股份有限公司自主研制的LW13-800/Y5000-50型双断口罐式高压交流断路器配用CY15液压弹簧操动机构,于2007年初完成了所有型式试验,2008年6月通过了国家级鉴定。 CY15液压弹簧操动机构是西安西开高压电气股份有限公司在长期对液压机构技术研究的基础上综合国内外液压机构发展的新趋势,自行开发研制的具有自主知识产权的液压机构,可配用于800kV断路器和GIS。 1 CY15液压弹簧机构产品结构及工作原理 1.1 产品结构 CY15液压弹簧机构采用碟形弹簧作为储能元件,工作缸采用常高压差动式回路(分、合闸缓冲油缸内带)、液压阀用两级放大(具备自保持和防慢分功能)、油泵采用双柱塞径向柱塞泵。其机芯液压模块三维外形见图1,机芯外形照片见图2。
图1 机芯液压模块三维外形 图2 机芯外形照片
1.2 液压弹簧机构工作原理图 CY15液压弹簧机构工作原理见图3。 2
98高压低压10111213144123567 低压高压 图3a CY15液压弹簧机构合闸工作原理 图3b CY15液压弹簧机构分闸工作原理 1.辅助开关 2.低压接头 3.合闸节流螺杆 4.合闸控制阀 5.分闸控制阀6.换向阀 7.分闸节流螺杆 8.控制模块 9.碟簧组 10.上支撑环 11.储能活塞 12.储能活塞缸 13.油位观察窗 14.在此测量储能活塞行程 2 CY15液压弹簧机构主要技术参数 机构行程:170mm; 分闸闭锁压力下分闸操作功:22000J; 合闸闭锁压力下合闸操作时的合闸操作功:4200J; 机构额定操作压力:58.2 MPa; 机构重合闸闭锁操作压力:57.8 MPa; 机构分闸闭锁操作压力:49MPa; 从零压到额定压力储能时间 : < 120s 泄漏率分、合闸位置(贮能活塞下降)泄漏率:< 2mm/24h 机械寿命: 5000次 3 贮能碟簧特点及计算 3.1 碟簧特点 3.1.1 具有变刚度特性,选择适当的内截锥高度h与钢板厚度s的比值,可得到非常适宜液压弹簧机构贮能用的渐减型特性,其变形与压力特性曲线见图4,当h/s接近1.4时,力值在一定位移范围内变化最小。 3.1.2采用不同的组合方式,可以得到不同的弹簧数值特性。对合增大位移、叠合增大力值、复合则同时增大位移和力值。 3.1.3可在支撑面和叠合面间采用圆钢丝支撑并涂润滑油减少摩擦。
图4 碟簧变形与压力特性曲线 3
3.2 碟簧计算[1] 3.2.1 结构参数计算如下 (见图5) 3.2.1.1已知碟簧参数符号代表意义如下: 碟簧外径—D; 内径—d; 壁厚—S;加载前簧片内截锥高度—h。 单片碟形弹簧的变形量—f; 3.2.1.2 叠簧的精确计算比较复杂,一般均在下列假定条件下对单片叠簧作近似计算: (1)受载后碟片轴向截面不变形而只是绕中性点O回转(图5); (2)碟片的载荷和支撑反力都均匀分布在圆周上。
图5 载荷不在内外圆周上的单片碟簧示意图 3.2.2 单片碟形弹簧的载荷与变形的关系
式中 p — 单片弹簧承受的载荷 N )13...(..........15.023−⎥⎦⎤⎢⎣⎡+⎟
⎠
⎞⎜⎝⎛−⎟
⎠
⎞⎜
⎝
⎛−=SfShSfShDfSp
α 4
f — 单片弹簧的变形量 mm D — 碟片的外径 mm S — 碟片厚度 mm h — 加载前碟片的内截锥高度 mm α — 系数,其数值为
式中 C — 碟片外径与内径之比,C=D/d E — 弹性模量 N/mm2 μ— 泊松比 对钢制碟形弹簧,E=206010N/mm2 ,μ=0.3,系数Nmm/106794.827−×=α
3.2.3单片碟形弹簧的刚度 )33........(..........12332223'−⎥⎥⎦⎤⎢⎢⎣⎡+⎟
⎠
⎞⎜⎝⎛+•−⎟
⎠
⎞⎜
⎝
⎛==SfSfShShDSdfdpp
α
因为载荷的作用位置不在内圆周和和外圆周上(见图5),弹簧的载荷和变形应作如下修正: )43.........(..........2−−=padDpe
)53.....(..........2−−=fdD
afe
由图5可以看出,由于D-d>2a,因此pe>p,fe<f,即在相同的变形大小时,变支位碟簧承受的载荷较大,即弹簧刚度增大。在相同的载荷大小时,变支位碟簧产生的变形较小。 图表1为碟簧组计算中的碟簧组力值和碟簧组变形行程之间的关系,图表2为液压压力
)23..(..........41ln2111122−−−⎟⎠⎞⎜
⎝
⎛
−+
⎟⎠
⎞⎜
⎝
⎛−=ECCccc
µπα 5碟簧位移与液压压力计算值
0100200300400500600700
020406080100120140160180碟簧位移mm
液压压强bar考虑摩擦后值实际值理论值
碟簧计算力值比较0100200300400500600700800900
020406080100120140160180碟簧行程mm
碟簧力值KN理论值摩擦值实际值
和碟簧组变形行程之间的关系。
图表1 碟簧组力值和碟簧组变形行程之间的关系 图表2 液压压力和碟簧组变形行程之间的关系 3.2.3 碟形弹簧的应力计算(计算结果见图表3) 6
碟簧受载后,截面内各点的应力不同,按照近似计算方法图6中各点的应力为 I点,通常为压缩应力
II点,通常为拉应力 Ⅲ点,通常为拉应力 Ⅳ点,通常为压缩应力 其中系数
图6 碟簧应力点分布示意图
)63...(..........5.02−⎥
⎦
⎤⎢⎣
⎡+⎟⎠⎞⎜
⎝
⎛−=γβασ
SfS
hDfS
I
)73...(..........5.02−⎥⎦⎤⎢⎣⎡+⎟
⎠
⎞⎜
⎝
⎛−−=∏γβασ
SfS
hDfS
)83...(..........5.0)2(2−⎥⎦⎤⎢⎣⎡+⎟
⎠
⎞⎜
⎝
⎛−−=γβγασ
SfS
hCDfS
III
)93...(..........5.0)2(2−⎥⎦⎤⎢⎣⎡−⎟
⎠
⎞⎜
⎝
⎛−−=γβγασ
SfS
hCDfS
IV
)103...().........1ln
1(
ln
6−−−=
CCCπβ
)113...().........2
1(
ln6−−=CCπγ 7
碟簧行程和各点强度计算-4000-3000-2000-1000010002000
020406080100120140160
碟簧行程mm相应各点应力值N/mm
2
σⅠσⅡσⅢαⅣ 图表3 碟簧各点的应力 4 缓冲特性对可靠性的影响 可靠性设计用于大操作功场合,除了合理分配加减速行程搭配外,为了达到目的而使冲击能量和剩余能量尽可能的减小,需要细化每一个环节,配合精度要相应提高。对阀来说主要是减少换向时的液压冲击,对工作缸就要从缓冲特性综合考虑了。一般来说缓冲特性要同时考虑机械特性缓冲段的尽量平缓和缓冲压力的限制,表1为最常见的缓冲结构。
表1 常充压差动式油缸及缓冲结构参数选取初算公式[2] 名称 油缸及主管路 排孔缓冲 阶梯缓冲
简 图
特点及适用场所 差动活塞,本身结构及主回路都简单,广泛用于液压弹簧机构 缓冲压力稳定,效果好,调整容易,用于分、合闸缓冲 结构简单,加工方便,调整较困难,用于分、合闸缓冲
结构 参数 计算 jnhlPcmVdηπ2102= dKD×−=1 DKD×=11 cm 2212dDKD−= (1)将缓冲行程分成多个间隔Sc,求出每个间隔内的平均减速度a及平均速度Vc; (2)求出对应于Sc的缓冲压力Pc
AFmaAPPc22112101010±+=−
MPa
(3)求出对应于Sc的瞬时节流面积Ac
cccPAVAµϕ10
= cm2
m—归算质量 kg; Vn—油缸合闸速度cm/s; C—压力整定系数0.8~0.9;
cm cm
cm