带宽自适应的MeanShift目标跟踪算法
- 格式:pdf
- 大小:1.06 MB
- 文档页数:6
无人机控制中的目标跟踪算法研究随着无人机技术的快速发展,无人机应用范围不断拓展,其中目标跟踪算法的研究成为无人机控制技术的重要组成部分。
无人机的应用场景多种多样,需要不同类型的目标跟踪算法来满足不同的需求。
本文将重点介绍无人机控制中的目标跟踪算法研究。
一、目标跟踪算法的分类目标跟踪算法按照算法的实现原理可以分为基于特征的目标跟踪算法和基于模型的目标跟踪算法。
1. 基于特征的目标跟踪算法基于特征的目标跟踪算法是根据目标物体在图像上的特征来实现目标跟踪的算法,主要包括颜色特征、纹理特征、形状特征等。
目前常见的基于特征的目标跟踪算法有:CAMShift算法、MeanShift算法、Haar分类器算法、SURF算法等。
2. 基于模型的目标跟踪算法基于模型的目标跟踪算法是根据建立的目标模型来实现目标跟踪的算法,主要包括卡尔曼滤波算法、粒子滤波算法、CAMshift-Kalman算法等。
其中,粒子滤波算法是近年来发展比较迅速的一种新型目标跟踪算法。
二、特征优化算法无人机应用场景的多样性决定了目标跟踪算法的实现会受到光影等各种因素的干扰,因此需要通过特征优化算法来提高算法鲁棒性,增强无人机跟踪效果。
特征优化算法是指通过对目标在图像上的特征进行处理,改变其在不同光照、角度等情况下的表现,从而提高算法的鲁棒性。
1. 扩展局部二值模式扩展局部二值模式(Extended Local Binary Pattern)是一种基于纹理特征的特征优化算法,它通过对LBP算子的改进,提高了算法的变化不变性和鲁棒性,使得其适用范围更广泛。
该算法已在无人机夜间目标跟踪中得到了广泛应用。
2. SIFT特征优化算法SIFT(Scale-invariant feature transform)是一种基于形状和纹理的特征提取算法,能够对目标物体在不同尺度、方位和光照条件下具有相同的描述,因此在无人机目标跟踪中具有重要的应用价值。
为了提高SIFT算法在无人机目标跟踪中的效果,研究者还开发了多种SIFT特征优化算法,如基于颜色的SIFT特征优化算法等。
目标跟踪中巴氏系数误差的分析及其消除方法Prepared on 22 November 2020目标跟踪中巴氏系数误差的分析及其消除方法 文志强1,2蔡自兴11 (中南大学信息科学与工程学院湖南长沙 410083)2 (湖南工业大学计算机与通信学院湖南株洲 412008)摘要:在mean shift 的目标跟踪方法中,Taylor公式的近似展开会造成优化过程中Bhattacharyya系数值的误差,这种误差会给目标跟踪带来偏差,同时不适合快速运动目标的跟踪。
针对Bhattacharyya系数的Taylor公式近似表示情形,研究了这种近似表示引起的系数误差和对目标跟踪的影响,在此基础上,将Bhattacharyya系数的优化问题转化为求解约束优化问题,从而提出一种改进的目标跟踪方法,以达到提高目标跟踪的精度,而且证明了该改进方法的收敛性。
实验表明本文方法对于快速运动目标的跟踪具有更好的跟踪精度。
关键字:mean shift, 目标跟踪, 目标模型, Bhattacharyya系数中图法分类号: TP3011引言Mean shift是一个由Fukunaga和Hostetler在1975年提出的一种无监督聚类方法,它使每一个点“漂移”到密度函数的局部极大值点。
1995年,Cheng[1]重新研究了mean shift,提出了更一般的表达形式并预示该算法在聚类和全局优化方面的巨大潜力。
Comaniciu在1999年对mean shift做了应用方面的研究[2]。
自此以后,mean shift已广泛应用于目标跟踪[3-5]、图像分割[6]、聚类分析[7]等领域,已成为当前研究的热点问题。
Comaniciu在[3][4]中首先将mean shift算法应用到目标跟踪领域中来,他利用Bhattacharyya系数作为目标模型与候选目标之间的相似性度量标准,用mean shift算法来搜索最优候选目标,获得了很好的跟踪效果。
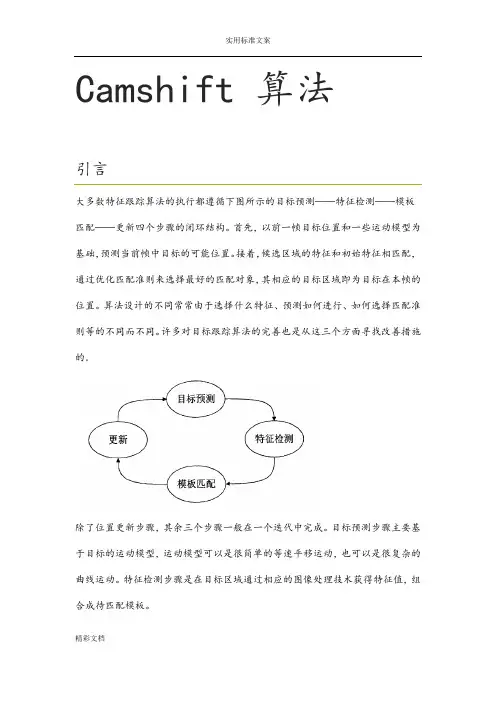
Camshift 算法引言大多数特征跟踪算法的执行都遵循下图所示的目标预测——特征检测——模板匹配——更新四个步骤的闭环结构。
首先,以前一帧目标位置和一些运动模型为基础,预测当前帧中目标的可能位置。
接着,候选区域的特征和初始特征相匹配,通过优化匹配准则来选择最好的匹配对象,其相应的目标区域即为目标在本帧的位置。
算法设计的不同常常由于选择什么特征、预测如何进行、如何选择匹配准则等的不同而不同。
许多对目标跟踪算法的完善也是从这三个方面寻找改善措施的。
除了位置更新步骤,其余三个步骤一般在一个迭代中完成。
目标预测步骤主要基于目标的运动模型,运动模型可以是很简单的等速平移运动,也可以是很复杂的曲线运动。
特征检测步骤是在目标区域通过相应的图像处理技术获得特征值,组合成待匹配模板。
模板匹配步骤是选择最匹配的待匹配模板,它的所在区域即是目标在当前帧的位置区域。
一般以对目标表象的变化所作的一些合理的假设为基础,—个常用的方法是候选特征与初始特征的互相关系数最小。
三个步骤不断往复。
更新步骤常常有两种,一是指对初始模板(特征)的更新,这是因为在目标的运动中,它的姿态、环境的照度等会发生变化,因此模板更新有利于跟踪的继续进行;二是指位置的更新,当在当前帧中找到与目标模板最匹配的模板后,常把该模板的中心位置作为目标在当前帧中的位置,并用该位置对目标的初始位置进行更新,作为下一帧处理时的目标初始位置。
1,Camshift原理CamShift利用目标的颜色直方图模型将图像转换为颜色概率分布图,初始化一个搜索窗的大小和位置,并根据上一帧得到的结果自适应调整搜索窗口的位置和大小,从而定位出当前图像中目标的中心位置。
2,目标表示(颜色概率分布图)(1) RGB颜色空间对光照亮度变化较为敏感,为了减少此变化对跟踪效果的影响,首先将图像从RGB空间转换到HSV空间。
(2).然后对其中的H分量作直方图,在直方图中代表了不同H分量值出现的概率或者像素个数,就是说可以查找出H分量大小为h的概率或者像素个数,即得到了颜色概率查找表。
目标检测和跟踪算法目标检测和跟踪算法是计算机视觉领域中的重要研究方向,其主要目标是从图像或视频中准确地检测和跟踪特定的目标。
通过这些算法,计算机可以自动识别出图像或视频中的目标,并对其进行跟踪,实现对目标的实时监测和分析。
目标检测算法是指通过计算机视觉技术,自动地从图像或视频中检测出目标的位置和大小。
目标检测算法可以分为两大类:基于特征的方法和基于深度学习的方法。
基于特征的目标检测算法是早期的目标检测方法,其主要思想是通过提取图像中的特征,如边缘、纹理和颜色等,然后利用分类器对目标进行识别。
常用的特征提取方法包括Haar特征、HOG特征和SIFT特征等。
这些方法在精度和效率方面有一定的优势,但对于复杂场景和多类别目标的检测效果有限。
基于深度学习的目标检测算法是近年来发展起来的一种新兴方法。
深度学习算法通过构建深层神经网络模型,实现对图像特征的端到端学习和自动提取。
其中,卷积神经网络(CNN)是最常用的深度学习模型之一,通过卷积层、池化层和全连接层等组成,可以有效地提取图像中的特征。
常用的基于深度学习的目标检测算法包括RCNN、Fast RCNN、Faster RCNN和YOLO等。
这些算法在目标检测的精度和效率上都取得了显著的突破,广泛应用于计算机视觉领域。
目标跟踪算法是指在目标检测的基础上,通过连续的图像或视频帧,实现对目标的连续追踪。
目标跟踪算法可以分为两大类:基于特征的方法和基于深度学习的方法。
基于特征的目标跟踪算法主要通过提取目标在连续帧中的特征,如颜色、纹理和形状等,然后利用相似度度量或运动模型进行目标的匹配和跟踪。
常用的特征提取方法包括MeanShift、CamShift和MIL等。
这些方法在简单场景和目标运动较小的情况下效果较好,但对于目标形状变化大或遮挡较多的情况下效果有限。
基于深度学习的目标跟踪算法是近年来的研究热点,其主要思想是通过构建深度神经网络模型,实现对目标的连续追踪。
4.1.跟踪算法的基本流程在本文的智能视频监控系统中,运动目标跟踪的基本流程如图4.1所示。
主要包括以下几个部分:(1)运动目标检测部分:在视频图像中定位、检测运动目标;(2)建立目标模板部分:根据检测到的目标,提取其特征建立跟踪模板;(3)目标运动预测部分:利用预测算法预测目标可能出现的位置;(4)运动目标跟踪部分:在预测范围内,利用跟踪算法搜索匹配的运动目标;如果在预测范围内找到与目标模板匹配的目标,则更新该模板;否则建立一个新的模板。
运动目标检测图4.1本文的目标跟踪算法结构框图4.2.Mean Shift算法Mean Shifl这_个概念最早是有Fukunaga和Hostetle于1975年提出的一种无参嚣;|一板]l_]一~一竺竺~~模一皈I|一王一目|! 离一估计算法,其主要思想是沿着概率梯度上升的方向找到分布的峰值,即寻找极值【61】;1 995年,Yizong Cheng等人定义了一簇核函数,并且设定了权重系数,这大大扩展了该算法的适用范围并使得其逐渐被不同领域所应用;自1 998年开始,该算法被Bradski应用于人脸跟踪,其在目标跟踪领域的优势显现出来,并不断被应用在目标跟踪的各个领域中‘621。
在Mean shift算法中非常重的一个概念就是核函数。
其定义为:若函数K:当X—R,存在剖面函数k:【0,叫一R,即式4.1:K(x)=k(㈣x 2) (4.1)核函数必须是一个非负非增函数,并且是分段连续的,同时满足式4.2:【k(r)dr<oo (4.2)常用的核函数有Epanechnikov核函数、单位均匀核函数、高斯核函数等,其中由于Epanechnikov核函数能够产生最小平均积分平方误差(MISE),所以在众多的跟踪方法中是最常使用的。
其函数定义为:KE(x)={co_卜82) “乏熄1 (4.3)Mean Shift算法的实质是Mean Shift向量的转移过程。
camshift算法原理Camshift算法是一种基于颜色统计的物体跟踪算法,常被用于计算机视觉领域中的目标跟踪任务。
该算法通过对目标对象的颜色特征进行建模,并在视频序列中实时追踪目标的位置和大小。
Camshift算法的原理基于直方图反向投影技术和Meanshift算法。
首先,算法通过用户选取的初始目标区域,计算该区域的颜色直方图模型。
然后,将该直方图模型与整幅图像的直方图进行比较,得到反向投影图像。
反向投影图像中的每个像素值表示该像素属于目标对象的概率。
接下来,利用Meanshift算法对反向投影图像进行均值漂移操作,寻找目标对象的最大概率区域。
均值漂移操作的原理是根据概率分布的重心不断迭代,使得目标区域的中心点逐渐向最大概率区域移动。
这样,在每次迭代过程中,目标区域的位置和大小都会根据图像的颜色分布而自适应地调整。
为了进一步提高目标区域的准确性和稳定性,Camshift算法引入了一个自适应窗口大小的机制。
在Meanshift算法的每次迭代中,算法会根据当前目标区域的大小,自动调整搜索窗口的大小。
当目标对象静止或运动缓慢时,窗口大小会自动缩小以提高精度;当目标对象运动较快时,窗口大小会自动扩大以保持目标的完整性。
Camshift算法还可以通过加权直方图模型来对目标对象的颜色特征进行动态更新。
在每次迭代中,算法会根据当前目标区域的位置和大小,调整颜色直方图的权重,使其更好地适应目标对象的变化。
总结来说,Camshift算法通过对目标对象的颜色特征进行建模和追踪,能够在复杂的背景环境中实现准确、稳定的目标跟踪。
该算法的原理基于直方图反向投影和Meanshift算法,通过自适应窗口大小和加权直方图模型的机制,能够适应目标对象的位置、大小和颜色的变化,具有较高的鲁棒性和实时性。
在计算机视觉和视频分析领域中,Camshift算法被广泛应用于目标跟踪、行为分析、视频监控等方面,为实现智能视觉系统提供了重要的技术支持。
基于模糊C均值的Mean-Shift目标跟踪算法
田存伟;葛广英;申哲
【期刊名称】《计算机应用》
【年(卷),期】2009(029)012
【摘要】针对Mean-Shift算法核函数带宽固定的缺陷,提出一种基于模糊C均值(FCM)的Mean-Shift目标跟踪算法.该算法采用FCM算法在YCrCb颜色空间对运动目标及附近背景进行分割,根据分割后的目标像素点统计量,遵循相邻两帧图像中目标大小不会突变的原则,修正Mean-Shift核函数窗宽.实验结果表明,该算法能够准确高效地对运动目标进行跟踪,对尺寸逐渐减小和逐渐增大的目标都能实现自动调整跟踪窗大小.
【总页数】4页(P3332-3335)
【作者】田存伟;葛广英;申哲
【作者单位】聊城大学,物理科学与信息工程学院,山东,聊城,252059;聊城大学,物理科学与信息工程学院,山东,聊城,252059;聊城大学,物理科学与信息工程学院,山东,聊城,252059
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于密度模糊C均值量测集划分的多扩展目标跟踪算法 [J], 陈辉;赵维娓
2.基于Mean-shift改进的自适应目标跟踪算法 [J], 张伟;李绍铭;王勇
3.基于Mean-shift改进的自适应目标跟踪算法 [J], 张伟;李绍铭;王勇
4.基于Mean-shift改进的自适应目标跟踪算法 [J], 张伟;李绍铭;王勇
5.基于联合粒子滤波和Mean-Shift的运动目标跟踪算法 [J], 杨佳
因版权原因,仅展示原文概要,查看原文内容请购买。
自适应融合角点特征的Camshift目标跟踪陈丽君;马永杰【期刊名称】《计算机工程与应用》【年(卷),期】2014(000)024【摘要】为了能够实时有效地跟踪运动目标,提出了一种新的自适应融合角点特征和颜色特征的Camshift目标跟踪算法。
该算法融合了角点的特征不变性,并采用Mean-Shift算法提供的非参数核密度估计的统计思想,计算各特征的概率密度函数,用Bhattacharyya系数作为相似性度量函数,利用相似性度量值之比自适应地融合角点特征和颜色特征,将得到的新的概率密度分布结合Camshift跟踪算法实现目标跟踪。
测试结果表明,该算法比传统的Camshift算法跟踪效果更好,更准确。
%In order to track moving targets in real time and effectively, in this paper, a new Camshift target tracking algo-rithm is proposed, in which corner features and color features are fused adaptively. The invariance of the corner is com-bined in this algorithm, and the kernel probability density estimation of the Mean-Shift algorithm is used to calculate the probability density function for each feature. Bhattacharyya coefficient is adopted as similarity measure function, then using the ratio of similarity to achieve adaptive fusion of corner and color features. The new probability density distribution and the Camshift tracking algorithm will be combined to achieve the target tracking. Simulation results show that the algo-rithm is better than traditional Camshift algorithm, and tracks object more accurately.【总页数】5页(P178-182)【作者】陈丽君;马永杰【作者单位】西北师范大学物理与电子工程学院,兰州 730070;西北师范大学物理与电子工程学院,兰州 730070【正文语种】中文【中图分类】TP391【相关文献】1.动态特征和静态特征自适应融合的目标跟踪算法 [J], 张立朝;毕笃彦;查宇飞;汪云飞;马时平2.基于多特征自适应融合的Camshift行人跟踪算法 [J], 侯红娜;武婷3.基于Camshift的多特征自适应融合船舶跟踪算法 [J], 云霄;肖刚4.结合角点特征的CamShift目标跟踪算法研究 [J], 刘美枝; 杨磊; 高海5.多特征自适应融合的CamShift算法与ROS跟随小车实现 [J], 党海鑫;高嵩;曹凯;陈超波;王坤因版权原因,仅展示原文概要,查看原文内容请购买。
行人跟踪算法行人跟踪是在车辆正常运行过程中实时的跟踪检测到的行人的算法。
在实际应用中,仅仅使用行人检测很难有效的满足行人检测的实时性和稳定性。
因此对行人检测的跟踪是十分必要的。
行人跟踪一般是通过对检测到的行人区域进行颜色和纹理的分析。
目前对于行人跟踪问题的主要研究方法有:卡尔曼滤波跟踪方法和均值偏移跟踪方法。
1. 卡尔曼滤波跟踪算法卡尔曼滤波在近20年来取得了长足的发展。
把目标的位置,速度和加速度作为目标状态矢量,通过目标的动力学方程来描述目标状态的变化,利用递推的计算方法,目标的状态可以方便的估计出来,这样目标的航迹就可以建立起来。
建立在非线性运动模型上的卡尔曼滤波称为扩展的卡尔曼滤波。
在雷达跟踪系统中,我们所用到的是离散型卡尔曼滤波。
离散卡尔曼滤波的状态方程,测量方程以及推广方程如下:状态方程:)1()1/()1()1,()(--Γ+--=k w k k k X k k k X φ (2.1) 测量方程:)()()()(k v k X k H k Z += (2.2)式中:X (k )为所要进行估计的状态值,)1/(-k k φ为状态转移矩阵,w (k )为协方差矩阵为Q 的状态噪声,H (k )为测量转移矩阵,v (k )为协方差矩阵为R的测量噪声。
状态预测方程:ˆˆ(/1)(/1)(1/1)Xk k k k X k k φ-=--- (2.3) 预测估计值协方差矩阵:)1/()1()1/()1/()1/1()1/()1/(-Γ--Γ+----=-k k k Q k k k k k k P k k k k P T T φφ (2.4)增益矩阵:1)]()()1/()()[()1/()(-+--=k R k H k k P k H k H k k P k K T T (2.5)滤波估计值:ˆˆˆ(/)(/1)()[()()(/1)]Xk k X k k k k Z k H k X k k =-+-- (2.6) 滤波估计值协方差矩阵:)1/()()()1/()/(---=k k P k H k k k k P k k P (2.7)在卡尔曼滤波过程中,只有确定了状态估计初始值ˆ(0)X和滤波估计值协方差矩阵的初始值P(0),整个滤波过程才能启动。