半主动空气悬架最优控制
- 格式:pdf
- 大小:1020.21 KB
- 文档页数:3
4.有关悬架的分析及讨论(1)悬架功能与基本组成;悬架功能悬架是汽车的车架(或承载式车身)与车桥(或车轮)之间的一切传力连接装置的总称,其作用是传递作用在车轮和车架之间的力和力扭,并且缓冲由不平路面传给车架或车身的冲击力,并减少由此引起的震动,以保证汽车能平顺地行驶。
基本组成典型的悬架结构由弹性元件、导向机构以及减震器等组成,个别结构则还有缓冲块、横向稳定杆等。
弹性元件又有钢板弹簧、空气弹簧、螺旋弹簧以及扭杆弹簧等形式,而现代轿车悬架多采用螺旋弹簧和扭杆弹簧,个别高级轿车则使用空气弹簧。
(2)主动悬架、半主动悬架控制原理;汽车的主动悬架系统是在普通悬架系统中附加一个可以控制阻尼作用力的装置,由执行机构、测量系统、反馈控制系统和能源系统四部分组成。
主动悬架能够根据汽车的运动状态和路面状况,适时地调节悬架的刚度和阻尼,使悬架系统处于最佳减振状态,使车辆在各种路面状况下都会有良好的舒适性。
主动悬架的关键部位是其执行机构,也就是可以调节的悬架阻尼系统。
当汽车载荷、行驶速度、路面状况等行驶条件发生变化时,主动悬挂系统能自动调整悬挂刚度(包括整体调整和各轮单独调整),从而同时满足汽车的行驶平顺性,操纵稳定性等各方面的要求。
半主动悬挂可视为由可变特性的弹簧和减振器组成的悬挂系统,虽然它不能随外界的输入进行最优控制和调节,但它可按存贮在计算机内部的各种条件下弹簧和减振器的优化参数指令来调节弹簧的刚度和减振器的阻尼状态。
半主动悬挂又称无源主动悬挂,因为它没有一个动力源为悬挂系统提供连续的能量输入,所以在半主动悬挂系统中改变弹簧刚度要比改变阻尼状态困难得多,因此在半主动悬挂系统中以可变阻尼悬挂系统最为常见(3)对主动悬架控制策略的理解及其相关思考。
其优点可归纳为如下几个方面:(1)悬挂刚度可以设计得很小,使车身具有较低的自然振动频率,以保证正常行驶时的乘坐舒适性。
汽车转向等情况下的车身侧倾,制动、加速等情况下的纵向摆动等问题,由主动悬挂系统通过调整有关车轮悬挂的刚度予以解决。
0引言车辆的安全性、操作稳定性及乘坐舒适性是车辆在行驶过程中非常重要的性能指标,而悬架系统作为车辆的重要部分,对其有重要的影响。
随着汽车技术的发展,车辆主动悬架慢慢地取代了被动悬架,而对于悬架控制器方面的设计也层出不穷。
常用的主动悬架的控制方法有自适应控制、模糊控制、神经网络智能控制及最优控制等,而最优控制作为现代控制理论的核心,理论基础最为完善。
通过线性最优控制算法,综合考虑悬架系统的各因素,设计一个半主动悬架最优控制策略,与被动悬架进行对比研究,从而起到对系统性能的改善。
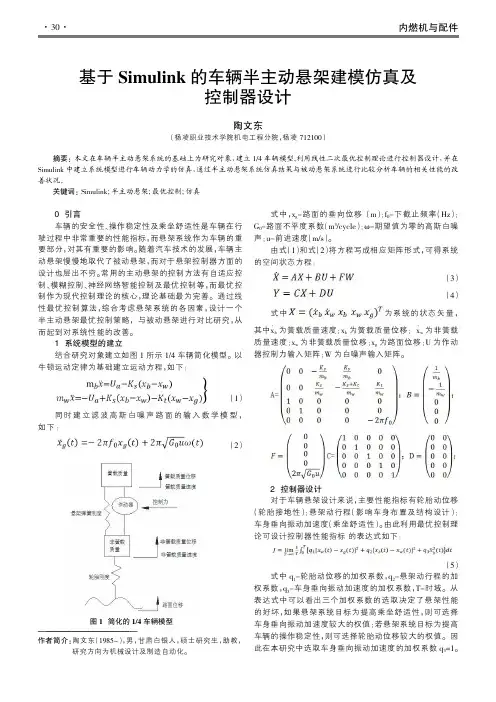
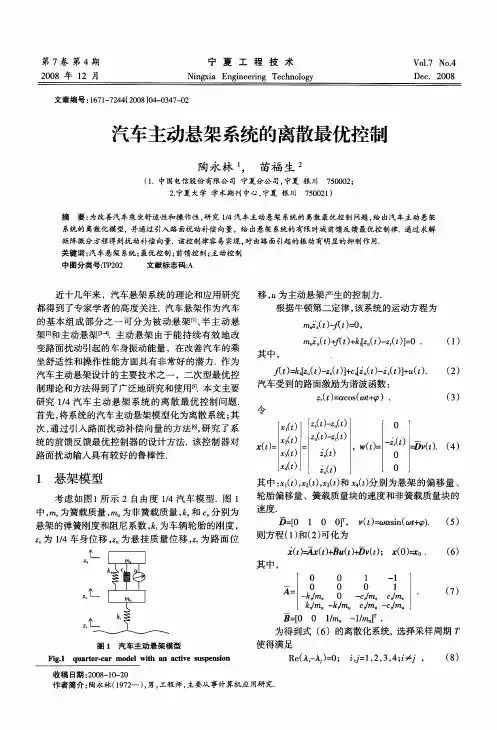
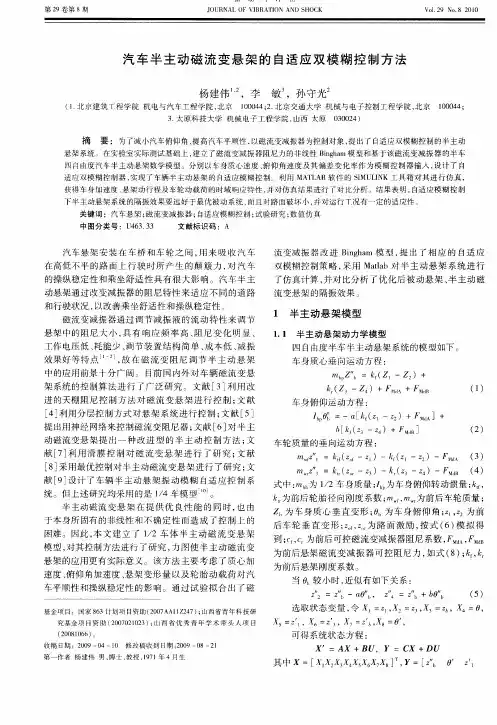
1系统模型的建立结合研究对象建立如图1所示1/4车辆简化模型。
以牛顿运动定律为基础建立运动方程,如下:(1)同时建立滤波高斯白噪声路面的输入数学模型,如下:(2)式中,x g -路面的垂向位移(m );f 0-下截止频率(Hz );G 0-路面不平度系数(m 3/cycle );ω-期望值为零的高斯白噪声;u-前进速度(m/s )。
由式(1)和式(2)将方程写成相应矩阵形式,可得系统的空间状态方程:(3)(4)式中为系统的状态矢量,其中x ̇b 为簧载质量速度;x b 为簧载质量位移;x ̇w 为非簧载质量速度;x w 为非簧载质量位移;x g 为路面位移;U 为作动器控制力输入矩阵;W为白噪声输入矩阵。
2控制器设计对于车辆悬架设计来说,主要性能指标有轮胎动位移(轮胎接地性);悬架动行程(影响车身布置及结构设计);车身垂向振动加速度(乘坐舒适性)。
由此利用最优控制理论可设计控制器性能指标的表达式如下:(5)式中q 1-轮胎动位移的加权系数,q 2-悬架动行程的加权系数,q 3-车身垂向振动加速度的加权系数,T-时域。
从表达式中可以看出三个加权系数的选取决定了悬架性能的好坏,如果悬架系统目标为提高乘坐舒适性,则可选择车身垂向振动加速度较大的权值;若悬架系统目标为提高车辆的操作稳定性,则可选择轮胎动位移较大的权值。
因此在本研究中选取车身垂向振动加速度的加权系数q 3=1。
一种改进的加速度阻尼半主动控制策略研究郭孔辉;王杨【摘要】经典的开关型天棚控制和加速度阻尼控制各有其优缺点:天棚控制在低频区(车身振动偏频附近)控制效果较好,加速度阻尼控制则在高频区(车身振动偏频以上)控制效果较好.为能在全频域内有效地降低车辆振动加速度,以提高车辆的乘坐舒适性,提出了一种改进的加速度阻尼控制(结合了天棚控制和加速度阻尼控制的优势),并从相频的角度对上述控制方法进行理论分析,证明了提出算法的优越性.最后进行MATLAB/Simulink仿真和可控减振器的硬件在环试验,从时域和频域两方面验证了算法的有效性.【期刊名称】《汽车工程》【年(卷),期】2019(041)005【总页数】6页(P481-486)【关键词】半主动悬架;天棚控制;加速度阻尼控制;全频域【作者】郭孔辉;王杨【作者单位】吉林大学,汽车仿真与控制国家重点实验室,长春130022;吉林大学,汽车仿真与控制国家重点实验室,长春130022【正文语种】中文前言独立悬架可分为麦弗逊、双横臂、多连杆等多种形式。
弹性元件起承载作用,主要分为钢板弹簧、扭杆弹簧、螺旋弹簧和空气弹簧等。
阻尼元件起减振作用,包括被动减振器和阻尼可调减振器,其中阻尼可调减振器包括电磁阀控阻尼可调减振器和电/磁流变液阻尼可调减振器等。
根据阻尼或刚度调整范围和功耗的考虑,悬架也可分为阻尼自适应悬架、半主动悬架、慢主动悬架和全主动悬架等[1]。
综合考虑能耗、控制带宽和系统的稳定性等因素,半主动悬架能够在性能和成本等方面达到最好的折中。
针对半主动悬架控制算法的研究受到国内外学者的广泛关注[2],也提出了诸多控制算法,诸如基于参考模型的滑模控制[3-5],鲁棒控制[6-7]和最优控制[8-10]等。
在算法实时性、简便性和工程实现等方面,其中以Karnopp等最早提出天棚控制策略(skyhook control,SH)最为著名[11]。
目前天棚控制是研究和工程应用最广泛的半主动控制策略之一。

汽车磁流变减振器半主动空气悬架仿真研究叶光湖;吴光强【摘要】Based on the stiffness test of air spring, a half vehicle vertical vibration model is established. Then, according to the characteristics of skyhook control and groundhook control, a combined control strategy for semi-active air suspension with magneto-rheological ( MR) damper is designed. The performances of suspension sys-tems with different control strategies are simulated with Matlab/Simulink. The comparison on the results of simula-tions in both time and frequency domains show that with combined control strategy, not only the ride comfort of vehi-cle can be enhanced, but also the handling stability of vehicle can be ensured, leading to the improvement of overall performance of vehicle.%根据空气弹簧刚度试验,建立了1/2汽车垂向振动模型。
进而,依据天棚控制和地棚控制特点,设计了汽车磁流变减振器半主动空气悬架综合控制策略。
在Matlab/Simulink环境下对带有不同控制策略的悬架系统进行性能仿真。
摘要悬架系统是车辆的一个重要组成部分。
车辆悬架性能是影响车辆行驶平顺性、操纵稳定性和行驶速度的重要因素。
传统的被动悬架一般由具有固定参数的弹性元件和阻尼元件组成,被设计为适应某一种路面,限制了车辆性能的进一步提高。
20世纪70年代工业发达国家已经开始研究基于振动主动控制的主动、半主动悬架系统。
近年来电子技术、测控技术、机械动力学等学科的快速发展,使车辆悬架系统由传统被动隔振发展到振动主动控制。
特别是信息科学中对最优控制、自适应控制、模糊控制、人工神经网络等的研究,不仅使悬架系统振动控制技术在现代控制理论指导下更趋完善,同时已开始应用于车辆悬架系统的振动控制,使悬架系统振动控制技术得以快速发展。
随着车辆结构和功能的不断改进和完善,研究车辆振动,设计新型悬架系统,将振动控制到最低水平是提高现代车辆质量的重要措施。
关键词:主动悬架控制策略模糊控制目录1 引言错误!未定义书签。
2 汽车悬架系统的类型和应用错误!未定义书签。
2.1 被动悬架 42.2 主动悬架 32.3 半主动悬架 43 各种悬架的性能比较错误!未定义书签。
4 汽车悬架系统的性能要求错误!未定义书签。
4.1 天棚阻尼与开关阻尼控制错误!未定义书签。
4.2 随机线性二次最优控制错误!未定义书签。
4.3 模糊控制错误!未定义书签。
4.4 神经网络控制错误!未定义书签。
4.5 预测控制错误!未定义书签。
4.6 滑模变结构控制错误!未定义书签。
4.7 复合控制错误!未定义书签。
5 汽车主动悬架的建模与仿真错误!未定义书签。
5.1 AMEsim软件基础错误!未定义书签。
5.2 汽车主动悬架的建模错误!未定义书签。
5.3 汽车主动悬架的模型的建立错误!未定义书签。
6 结论错误!未定义书签。
参考文献:错误!未定义书签。
1 悬架系统的类型与工作原理悬架是车架与车桥之间一切传力装置的总称,它的主要功用是传递作用在车轮和车架之间的力和力矩,缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的振动,以保证汽车能平顺行驶。
汽车主动悬架控制策略综述 摘 要 首先介绍了主动悬架的发展情况和应用情况,然后引入了作性能分析所需的车辆主动悬架动力学模型,以1/4动力学模型为基础,得出了运动微分方程以及控制状态方程组。最后,介绍了现在流行的主动悬架控制策略,包括PID控制、鲁棒控制、神经网络控制、滑模变控制、模糊控制和自适应控制。 关键词:主动悬架;控制策略 Automotive Active Suspension Control Strategies
Abstract: Firstly, introducing active development and application of suspension, then introduced as the performance required for the analysis of vehicle active suspension dynamics model, through 1/4 kinetic model, derived differential equations of motion and control state equations . At last, Introduced the now popular active
suspension control strategy, including PID control, robust control, neural network control, sliding mode control, fuzzy control and adaptive control. Keywords: Active Suspension; Control Strategy
0 引言 传统的被动悬架的刚度和阻尼是按经验或优化设计的方法确定的,在汽车行驶过程中其性能是不变的,也是无法进行调节的。虽然随着近年来,悬架在设计和工艺上得到不断改善,实现了低成本、高可靠性的目标,但无法彻底解决平顺性和操纵稳定性之间的矛盾。20世纪50年代提出了全主动悬架的概念,主动悬架就是根据汽车的运动和路面的状况,适时地调节悬架的刚度和阻尼系数,使其处于最佳的减振状态。从20世纪80年代以来,世界各大汽车公司和生产厂家都在竞相研制开发这种新型的悬架系统。丰田、洛特斯、沃尔沃等汽车公司,已在汽车上进行了较成功的实验。[1] 1 汽车主动悬架动力学模型 建立如图所示的具有2自由度的1 / 4车辆动力学模型,该主动悬架装置主要包括弹簧和执行器两大部分,执行器通常为作动器,并通过对作动器力的控制来实现悬架系统的性能优化。[2] 图1 主动悬架动力学模型 系统的运动微分方程如下: ()()0()()()0ssssussuduussussudturmxkxxcxxFmxkxxcxxFkxx
汽车悬架振动主动控制技术【摘要】近年来,关于我国汽车悬架振动主动控制的问题日益严重,为了引起人们的重视,本文将从悬架振动主动控制技术的类型和原理,悬架振动主动控制技术的特点,主动控制技术的具体实施过程等方面进行分析探讨,希望对该领域的研究提供一定的借鉴。
【关键词】汽车,悬架,振动,主动,控制一、前言关于汽车悬架振动主动控制技术的研究在我国相关领域一直占据着十分重要的地位,虽然已经取得了一定的成绩,但在实际应用,特别是我国汽车悬架振动主动控制技术中还存在着一定的问题,有必要从住悬架振动主动控制技术的类型和原理,悬架振动主动控制技术的特点,主动控制技术的具体实施过程等方面进行更加深入的探讨。
二、悬架振动主动控制技术的类型和原理由于现代科学技术的高速发展,现代汽车对于主动悬架的性能提出了更高的技术性要求,这就需要应用现代科学技术不断地完善和更新悬架的振动控制方法和结构形式来配合新技术的发展,悬架的分类方式和结构形式有很多,我们主要介绍根据控制力的分类,将主动悬架系统分为被动、主动和半主动三种类型的悬架。
被动悬架系统在确定之后,汽车在行驶过程中就不能随着外界条件的改变而改变,由于不能够随意改变和选择参数,使得被动悬架系统的性能受到了限制,因此被动悬架的缺点就在于它的减振性能较差。
半主动悬架采用了可变性的弹簧和减震器,它在生产力方面类似于以往的被动悬架,进步的地方在于半主动悬架的减振性有所提高,主要工作原理是通过切换空气来改变弹簧的刚度。
主动悬架系统主要由执行机构和控制系统构成,它可以通过传感器来检测汽车的运行情况、道路目前的状况,这种悬架系统的减震性非常好,通常具有两种悬架形式,一种是通过电机驱动的空气式主动悬架,另一种是日产和丰田部分高档汽车所应用的电磁阀驱动的油气式主动悬架,油气式主动悬架利用与油压缸相连通的弹簧来吸收振动产生的能量,从而实现减震的目的。
三、悬架振动主动控制技术的特点悬架振动主动控制技术主要是利用现代汽车科技新技术,提高汽车的减振性能,减少车轮与车身之间的摩擦,降低能源消耗,减少噪音污染,保护环境。