第三章无人直升机的飞行控制技术
- 格式:ppt
- 大小:5.44 MB
- 文档页数:71
第1篇第一章总则第一条为保障直升机飞行安全,预防事故发生,根据《中华人民共和国民用航空法》、《中华人民共和国民用航空安全保卫条例》等法律法规,结合直升机飞行特点,制定本规定。
第二条本规定适用于中华人民共和国境内所有民用直升机飞行活动,包括但不限于直升机生产、运营、维护、修理、使用、培训、科研、救援等活动。
第三条直升机飞行安全是一项系统工程,涉及多个环节和众多参与者。
各相关部门和单位应按照职责分工,共同做好直升机飞行安全工作。
第四条直升机飞行安全工作应遵循以下原则:(一)预防为主,安全第一;(二)以人为本,科学管理;(三)责任明确,奖惩分明;(四)持续改进,提高安全水平。
第二章组织与管理第五条国家民用航空局(以下简称民航局)负责全国民用直升机飞行安全管理工作,制定直升机飞行安全政策和法规,监督指导地方民航局和各相关部门做好直升机飞行安全工作。
第六条地方民航局负责本行政区域内民用直升机飞行安全管理工作,组织实施民航局制定的直升机飞行安全政策和法规,协调解决直升机飞行安全工作中的重大问题。
第七条直升机运营人应当建立健全直升机飞行安全管理体系,制定直升机飞行安全管理制度,明确飞行安全责任,加强飞行安全管理。
第八条直升机运营人应当设立飞行安全管理部门,配备具有飞行安全专业知识和经验的人员,负责直升机飞行安全管理工作。
第九条直升机运营人应当定期对飞行安全管理人员进行培训,提高其飞行安全管理水平。
第十条直升机运营人应当建立健全直升机飞行安全信息报送制度,及时、准确地向民航局和地方民航局报送直升机飞行安全信息。
第三章飞行准备第十一条飞行前,直升机运营人应当对飞行任务进行全面评估,确保飞行任务的安全可行。
第十二条飞行前,直升机运营人应当对直升机进行全面检查,确保直升机处于良好状态。
第十三条飞行前,直升机驾驶员应当了解飞行任务、气象条件、直升机性能等信息,做好飞行准备。
第十四条飞行前,直升机驾驶员应当检查飞行计划和飞行任务书,确认飞行任务符合飞行规定。
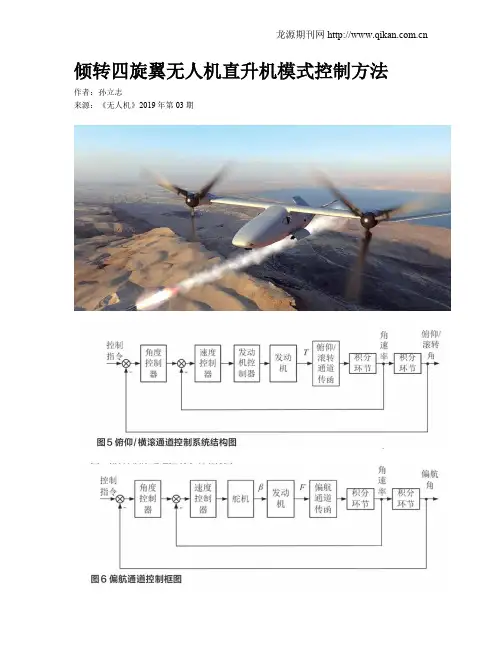
倾转四旋翼无人机直升机模式控制方法作者:孙立志来源:《无人机》2019年第03期随着无人机技术日趋先进,融合无人直升机和固定翼无人机优点的无人机型应运而生。
其中,倾转四旋翼无人机兼具可垂直起降、载重量大及巡航速度高等特点的无,是极具发展潜力的新型无人机种。
采用经典力学理论,对倾转四旋翼无人机进行了力学分析,建立了直升机模式下的模型,得出了其质心运动的动力学方程;确定了在直升机模式下的姿态和位置控制方法,设计了倾转四旋翼无人机各个控制回路的控制结构和控制律。
倾转四旋翼无人机具有可以倾转的旋翼,同时有水平固定机翼,因此在巡航速度、有效载荷上更加突出,在军事和商业方面具有广阔的应用前景,是未来无人无人机发展的一个重要方向。
倾转旋翼机的控制方式主要有两种,一种是直升机控制模式,另一种是固定翼无人机控制模式。
其飞行过程如下,无人机首先在直升机模式下垂直起飞达到一定高度;接着进入过渡飞行阶段,短舱发生倾转,旋翼回转面由平行于机身纵轴逐渐倾转至垂直于机身纵轴,在该阶段,旋翼逐渐转换为提供推力,而升力则由固定翼提供;完成旋翼倾转后,无人机进入平飞模式,以固定翼模式巡航飞行。
在垂直起降的过程中可以按照直升机控制方法来控制,通过改变旋翼的拉力矢量来改变飞行状态;在平飞阶段主要采用固定翼无人机控制模式,通过控制气动舵面的来控制飞行状态。
倾转四旋翼无人机力学模型坐标轴系的定义为便于对倾转四旋翼无人机进行力学分析,需要分别建立机体坐标系和地理坐标系如图1所示。
式中,θ为俯仰角,φ为横滚角,ψ为偏航角。
倾转四旋翼无人机直升机模式下的力学建模利用经典力学对倾转四旋翼无人机进行力学分析,进行以下假设以简化分析:(1)将倾转四旋翼无人机视为刚体,且质量是常数;(2)假设地面为惯性参考系;(3)忽略地球曲率,视地面为平面;(4)假设重力加速度不随飞行高度变化而变化。
由于在直升机模式下前飞速度较慢,气动舵对无人机的受力影响很小,故无人机主要受到旋翼拉力T和重力G的作用。

F3C比的是飞行的规范性航模飞机一般与载人的飞机一样,主要由机翼、尾翼、机身、起落架和发动机和控制系统六部分组成。
1、机翼―――是模型飞机在飞行时产生升力的装置,并能保持模型飞机飞行时的横侧安定。
2、尾翼―――包括水平尾翼和垂直尾翼两部分。
水平尾翼可保持模型飞机飞行时的俯仰安定,垂直尾翼保持模型飞机飞行时的方向安定。
水平尾翼上的升降舵能控制模型飞机的升降,垂直尾翼上的方向舵可控制模型飞机的飞行方向。
3、机身―――将模型的各部分联结成一个整体的主干部分叫机身。
同时机身内可以装载必要的控制机件,设备和燃料等。
4、起落架―――供模型飞机起飞、着陆和停放的装置。
前部一个起落架,后面两面各一个起落架叫前三点式, 前部两面各一个起落架,后面一个起落架叫后三点式。
5、发动机―――它是模型飞机产生飞行动力的装置。
模型飞机常用的动力装置有:橡筋束、活塞式发动机、喷气式发动机、电动机。
较少使用的有:脉冲喷气发动机(重量大,油耗大)、转子发动机(只有OS的一款)空气发动机(上世纪70年代用于室内模型与活塞发动机类似)6、控制系统―――控制系统主要用来控制模型的空中机动,包括起飞降落转向等。
国际规则F3C动作图解一、场地二、预赛A组动作A1.菱形——逆风(进入)/ 逆风(改出)垂直起飞,在平视高度处悬停2秒;后退上升飞行至标记旗1(2)上方2.5m处,任一方向水平自旋转180°(以标记旗延长线为轴)悬停2秒;后退上升飞行至起飞点上方5m处,任一方向自旋转360°悬停2秒;后退下降飞行至标记旗2(1)上方2.5m处,任一方向自旋转180°(以标记旗延长线为轴)悬停2秒;后退下降飞行至起飞区上方,平视高度处悬停2秒;垂直降落。
A2.倒三角形——逆风(进入)/ 逆风(改出)垂直起飞至平视高度,悬停2秒;沿45º后退上升并同时向任一方向自旋转180º至标记旗1(2)正上方;悬停2秒;后退水平飞行并同时以任一方向自旋转360°至标记旗2(1)正上方,悬停2秒;沿45º下降并同时以任一方向自旋180°至起飞区上方,悬停2秒,垂直降落。
无人直升机自主飞行控制技术赖水清;陈传琪;张思;单俊杰【摘要】分析了国内外无人直升机自主飞行控制技术的现状及差距,提出了应重点解决的关键技术,为我国无人直升机自主飞行控制技术发展提供参考.【期刊名称】《直升机技术》【年(卷),期】2013(000)002【总页数】7页(P65-71)【关键词】无人直升机;自主飞行控制【作者】赖水清;陈传琪;张思;单俊杰【作者单位】中国直升机设计研究所,江西景德镇333001;中国直升机设计研究所,江西景德镇333001;中国直升机设计研究所,江西景德镇333001;海军驻景德镇地区航空军事代表室,江西景德镇333002【正文语种】中文【中图分类】V249.1220 引言20世纪50年代以来,无人直升机在经历了试用、萧条、复苏之后,现已步入加速发展时期。
基于研究成本、市场需求、技术能力、研制周期、工程化水平以及研制风险等因素,目前国内外研发机构均将小型(或微小型)无人直升机作为重点研发对象,其起飞重量通常在2000kg以下,其中500kg以下又占绝大多数。
无人直升机相对于固定翼无人机而言,发展较晚且型号较少。
因为无人直升机是一个具有非线性、多变量、强耦合的复杂被控对象,其飞行控制技术更加复杂。
飞行控制技术的突破是实现无人直升机真正工程化和实用化的关键。
飞行控制技术水平决定了无人直升机的能力,技术水平越高,能力越强,所能承担的任务越多,适应复杂环境的能力越强,用途更加广泛。
无人直升机的飞行控制方式有3种:遥控型、自动型、自主型。
遥控型是指通过数据链由地面操作人员对无人直升机进行控制,属“人在回路”控制,要求地面操作人员具有比较专业的水平,因而无法满足工程化和实用化的需求,是实现自动型和自主型控制的过渡阶段。
自动型是指根据任务不同,在起飞前规划好航线,设置好控制参数,使无人直升机按预定的航线飞行,完成相应的任务,同时具备简单的故障和应急处置模式。
自主型是指无人直升机不依赖人的干涉,能够进行自主控制。
飞行器的控制方法和技术在飞行器的发展历程中,控制是一个非常重要的环节。
无论是民用飞机、军用战机,还是直升机、无人机等各种飞行器,都需要通过控制系统来实现飞行和操纵。
这些控制系统中运用了多种控制方法和技术,下面就对一些常见的控制方法和技术进行简要介绍。
一、PID控制技术PID控制技术是一种常见的控制方法,它的全称是比例-积分-微分控制技术,通过对被控对象进行实时的测量和反馈,调整控制参数,来保持被控对象的运动状态。
PID控制技术最大的优点是简单易懂,对于一些需要精密控制的系统,如飞行器、机器人等,都有广泛的应用。
在飞行器中,PID控制技术可以用于控制飞行器的姿态和高度等参数,保持飞行器的平衡状态,从而实现稳定的飞行。
例如,飞机的自动驾驶系统、直升机的稳定器以及无人机的高度控制系统,都可以运用PID控制技术来实现。
二、模糊控制技术模糊控制技术是一种基于模糊逻辑的控制方法,它可以针对复杂的控制问题,提供一种有效的解决方案。
在飞行器中,模糊控制技术可以用于控制飞行器的姿态、高度、速度等参数。
模糊控制技术对于飞行器的稳定性和鲁棒性有很好的保障,可以针对不同的控制要求进行定制化的优化。
三、神经网络控制技术神经网络控制技术是一种基于神经网络的智能控制方法,它能够模拟人类神经系统的学习和适应能力,通过学习已有的控制模型,并根据反馈信息进行调整,使控制系统能够适应不同的控制场景,并不断优化控制结果。
在飞行器中,神经网络控制技术可以用于控制飞行器的自主导航和自主控制。
例如,无人机的自主导航系统、飞机的自动驾驶系统等,都可以依靠神经网络控制技术实现智能化的控制。
四、遗传算法控制技术遗传算法控制技术是一种基于遗传算法的控制方法,它能够通过遗传算法的进化和优化过程,找到最优的控制参数组合,从而实现控制效果的最大化。
在飞行器中,遗传算法控制技术可以用于优化飞行器的控制模型。
例如,可以使用遗传算法寻找最优的控制参数组合,优化飞机的稳定性、速度、燃油消耗等多种因素,从而提高飞行器的性能和控制效果。

摘要四旋翼飞行器是一种四螺旋桨驱动的、可垂直起降的飞行器,这种结构被广泛用于微小型无人飞行器的设计,可以应用到航拍、考古、边境巡逻、反恐侦查等多个领域,具有重要的军用和民用价值。
四旋翼飞行器同时也具有欠驱动、多变量、强耦合、非线性和不确定等复杂特性,对其建模和控制是当今控制领域的难点和热点话题。
本次设计对小型四旋翼无人直升机的研究现状进行了细致、广泛的调研,综述了其主要分类、研究领域、关键技术和应用前景,然后针对圆点博士的四旋翼飞行器实际对象,对其建模方法和控制方案进行了初步的研究。
首先,针对四旋翼飞行器的动力学特性,根据欧拉定理以及牛顿定律建立四旋翼无人直升机的动力学模型,并且考虑了空气阻力、转动力矩对于桨叶的影响,建立了四旋翼飞行器的物理模型;根据实验数据和反复推算,建立系统的仿真状态方程;在Matlab环境下搭建了四旋翼飞行器的非线性模型。
选取四旋翼飞行器的姿态角作为控制对象,借助Matlab模糊工具箱设计了模糊PID控制器并依据专家经验编辑了相应的模糊规则;通过仿真和实时控制验证了控制方案的有效性,并在此控制方案下采集到了输入输出数据;利用单片机编写模糊PID算法控制程序,实现对圆点博士四旋翼飞行器实物的姿态控制。
本设计同时进行了Matlab仿真和实物控制设计,利用模糊PID算法,稳定有效的对四旋翼飞行器的姿态进行了控制。
关键词:四旋翼飞行器;模糊PID;姿态控制ⅠAbstractQuadrotor UA V is a four propeller driven, vertical take-off and landing aircraft, this structure is widely used in micro mini unmanned aerial vehicle design and can be applied to multiple areas of aerial, archaeology, border patrol, anti-terrorism investigation, has important military and civil value.Quadrotor UA V is a complicated characteristic of the complicated characteristics such as the less drive, the multi variable, the strong coupling, the nonlinear and the uncertainty, and the difficulty and the hot topic in the control field.Research status of the design of small quadrotor UA V were detailed and extensive research, summarized the main classification, research areas, key technology and application prospect of and according to Dr. dot quadrotor actual object, the modeling method and control scheme were preliminary study.First, for the dynamic characteristics of quadrotor UA V, dynamic model of quadrotor UA V is established according to the theorem of Euler and Newton's laws, and consider the air resistance and rotation torque for the effects of blade, the establishment of the physical model of the quadrotor UA V; root according to experimental data and repeated calculation, the establishment of system simulation equation of state; under the MATLAB environment built the nonlinear model of the quadrotor UA V Select the attitude of the quadrotor angle as the control object, with the help of matlab fuzzy toolbox to design the fuzzy PID controller and according to experience of experts to edit the corresponding fuzzy rules; through the simulation and real-time control verify the effectiveness of the control scheme, and this control scheme under the collection to the data input and output; written by SCM fuzzy PID control algorithm, dots, Quad rotor UA V real attitude control. The design of the Matlab simulation and the physical control design, the use of fuzzy PID algorithm, the stability of the four rotor aircraft attitude control.Keywords:Quadrotor UA V;F uzzy PID;Attitude controlⅡ目录摘要(中文) (Ⅰ)摘要(英文) (Ⅱ)第一章概述 (1)1.1 课题背景及意义 (1)1.2 四旋翼飞行器的研究现状 (2)1.3 四旋翼飞行器的关键技术 (5)1.3.1 数学模型 (6)1.3.2 控制算法 (6)1.3.3 电子技术 (6)1.3.4 动力与能源问题 (6)1.4 本文主要内容 (6)1.5本章小结 (7)第二章四旋翼飞行器的运动原理及数学模型 (7)2.1四旋翼飞行器简介 (7)2.2 四旋翼飞行器的运动原理 (8)2.2.1 四旋翼飞行器高度控制 (8)2.2.2 四旋翼飞行器俯仰角控制 (9)2.2.3 四旋翼飞行器横滚角控制 (9)2.2.4 四旋翼飞行器偏航角控制 (10)2.3四旋翼飞行器的数学模型 (11)2.3.1坐标系建立 (11)2.3.2基于牛顿-欧拉公式的四旋翼飞行器动力学模型 (12)2.4 本章小结 (15)第三章四旋翼飞行器姿态控制算法研究 (15)3.1模糊PID控制原理 (15)3.2 姿态稳定回路的模糊PID控制器设计 (16)3.2.1 构建模糊PID控制器步骤 (17)3.2.2 基于Matlab的姿态角控制算法的仿真 (22)3.3 本章小结 (25)第四章四旋翼飞行器飞行控制系统软件设计 (25)4.1 模糊PID控制算法流程图 (25)4.2 系统实验及结果分析 (26)4.3 本章小结 (27)第五章总结与展望 (28)5.1 总结 (28)5.2 展望 (28)参考文献 (28)第一章概述有史以来,人类一直有一个梦想,那就是可以像蓝天上自由翱翔的鸟儿一样。
科技与创新┃Science and Technology&Innovation ·100·2019年第18期文章编号:2095-6835(2019)18-0100-02无人直升机飞控系统仿真环境概述黄贤开(航空工业直升机设计研究所,江西景德镇333001)摘要:无人直升机飞行控制系统的主要功能是通过控制主、尾桨叶的桨距和发动机风门,以稳定直升机姿态(俯仰、横滚)和航向,控制飞行航迹(爬升、下降、巡航、左右盘旋、悬停等),实现从起飞到降落整个过程的飞行管理。
由于飞控系统直接关系到无人直升机的飞行安全和飞行特性,其中飞行控制律的调参设计及仿真、系统综合集成、功能转换及故障模拟等是飞控系统研制的重点内容,因此飞控系统的研制必须具备良好的仿真环境。
旨在对飞控系统各种仿真技术的优劣进行分析。
关键词:无人直升机;飞行控制系统;仿真技术;仿真系统中图分类号:V249.1文献标识码:A DOI:10.15913/ki.kjycx.2019.18.0411无人直升机仿真技术发展与现状仿真技术的发展历经50多年,大致分为2个阶段[1]:①发展阶段。
第二次世界大战末期,当时还没有计算机,仿真是利用实物进行,即模拟仿真,火炮与飞行控制动力学系统的研制推进了采用模拟方法进行仿真的发展,1946年第一台电子模拟的计算机研制成功。
从20世纪50年代末期至20世纪60年代,洲际导弹与宇宙飞船的研制促使混合性仿真技术的进一步发展,同时仿真技术也在阿波罗登月计划等方面得到应用。
②成熟阶段。
当前无人直升机飞控系统仿真技术主要有两种,一种是带有部分实物的半物理仿真系统,又称为硬件在回路仿真系统(Hardware-In-Loop,简称HIL),将系统关键硬件实物接入到仿真回路,为其运行提供虚拟的控制环境[2],其又可以分为飞控计算机在回路的半物理仿真系统(如图1所示)和传感器在回路的半物理仿真系统(如图2所示);另外一种是不带任何实物的等效仿真系统(也称数学仿真系统[3]),如图3所示,所有软件均可以在一台PC机上完成。
直升机飞行稳定性与控制直升机是一种可以垂直起降的飞行器,它不同于传统的固定翼飞机,需要依靠旋翼产生的升力进行飞行。
由于旋翼的特殊作用,使直升机的飞行稳定性和控制较为复杂,因此需要进行科学的研究和设计。
一、直升机飞行稳定性直升机的飞行稳定性是指在飞行过程中,飞机能够保持平衡的稳定性,避免不稳定的飞行状态和失速等问题。
直升机的稳定性主要包括静稳定性和动稳定性两个方面。
1、静稳定性静稳定性是指在静止状态下,直升机可以保持平衡状态的能力。
直升机的静稳定性是由飞机的几何构造和重心位置以及质量分布等因素决定的。
一般情况下,直升机的重心位置要尽量控制在几何中心线上,以保证其静稳定性。
2、动稳定性直升机的动稳定性是指在飞行过程中,飞机可以保持平衡状态的能力。
动稳定性的影响因素很多,包括飞机的结构特点、飞行控制系统的设计、环境因素等。
为了保证直升机的动稳定性,需要进行科学的控制和设计,如增加飞机的阻尼和控制系统的响应速度等。
二、直升机飞行控制直升机的飞行控制包括飞行控制系统和操纵系统两个方面。
飞行控制系统是指直升机的电子控制系统,它通过感知飞机的位置、速度、姿态等信息,对飞机进行自动控制。
而操纵系统则是指直升机的操纵杆、脚蹬和螺旋桨等部分,通过对这些装置的控制,实现对直升机的操作和控制。
1、飞行控制系统直升机的飞行控制系统包括融合导航系统、姿态控制系统和引导着陆系统3部分。
其中,融合导航系统可以提供飞机的位置、速度和方向等信息,姿态控制系统则可以对飞机的姿态进行控制,引导着陆系统可以实现对飞机的着陆控制。
2、操纵系统直升机的操纵系统包括飞行控制杆、脚蹬、螺旋桨的变距器和前控杆等。
其中,飞行控制杆可以实现对飞机的加速和升降等操作,脚蹬则可以实现对飞机的方向调节,螺旋桨变距器用于控制旋翼的升力和变速,前控杆则可以用于改变飞机的姿态。
三、直升机飞行控制技术的发展随着科学技术的不断发展,直升机的飞行稳定性和控制技术也在不断升级和发展。