离散余弦变换最小均方算法(DCT-LMS)的自适应均衡MATLAB
- 格式:docx
- 大小:258.51 KB
- 文档页数:8
1引言自适应滤波处理技术可以用来检测平稳和非平稳的随机信号,具有很强的自学习和自跟踪能力,算法简单易于实现,在噪声干扰抵消、线性预测编码通信系统中的自适应均衡、未知系统的自适应参数辨识等方面获得了广泛的应用。
Widrow和Hoff于1960年提出最小均方算法(leastmeansquare,LMS),其显著特点是它的简单性。
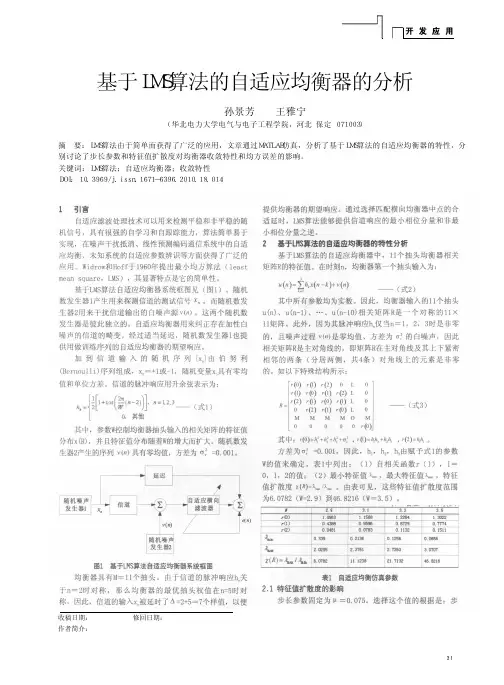
基于LMS算法自适应均衡器系统框图见(图1)。
随机数发生器1产生用来探测信道的测试信号,而随机数发生器2用来干扰信道输出的白噪声源。
这两个随机数发生器是彼此独立的。
自适应均衡器用来纠正存在加性白噪声的信道的畸变。
经过适当延迟,随机数发生器l也提供用做训练序列的自适应均衡器的期望响应。
加到信道输入的随机序列{x}由伯努利(Bernoulli)序列组成,=+1或-1,随机变量具有零均值和单位方差。
信道的脉冲响应用升余弦表示为:——(式1)其中,参数W控制均衡器抽头输入的相关矩阵的特征值分布x(R),并且特征值分布随着W的增大而扩大。
随机数发生器2产生的序列具有零均值,方差为=0.001。
均衡器具有M=11个抽头。
由于信道的脉冲响应h关于n=2时对称,那么均衡器的最优抽头权值在n=5时对称。
因此,信道的输入x被延时了=2+5=7个样值,以便提供均衡器的期望响应。
通过选择匹配横向均衡器中点的合适延时,LMS算法能够提供信道响应的最小相位分量和非最小相位分量之逆。
2基于LMS算法的自适应均衡器的特性分析基于LMS算法的自适应均衡器中,11个抽头均衡器相关矩阵R的特征值。
在时刻n,均衡器第一个抽头输入为:——(式2)其中所有参数均为实数。
因此,均衡器输入的11个抽头u(n)、u(n-1)、…、u(n-10)相关矩阵R是一个对称的11×11矩阵。
此外,因为其脉冲响应h仅当n=1,2,3时是非零的,且噪声过程是零均值、方差为的白噪声,因此相关矩阵R是主对角线的,即矩阵R在主对角线及其上下紧密相邻的两条(分居两侧,共4条)对角线上的元素是非零的。
matlab实现傅里叶变换与反变换、离散余弦变换与反变换首先,我们需要了解傅里叶变换和离散余弦变换的原理。
傅里叶变换是一种将时域信号转换为频域信号的方法,它可以将任意信号分解为一系列正弦和余弦信号的叠加。
离散余弦变换则是一种将离散信号转换为一组离散余弦信号的方法。
接下来,我们可以使用matlab中的fft函数来实现傅里叶变换和反变换。
具体步骤如下:
1. 定义一个信号向量x,可以使用matlab中的sin、cos、randn 等函数生成。
2. 使用fft函数对信号进行傅里叶变换,得到频域信号向量X。
3. 使用ifft函数对频域信号向量X进行反变换,得到原始信号向量x1。
4. 使用plot函数将原始信号向量x和反变换后的信号向量x1绘制在同一张图上,进行对比。
接下来,我们可以使用matlab中的dct函数来实现离散余弦变换和反变换。
具体步骤如下:
1. 定义一个长度为N的信号向量x,可以使用matlab中的sin、cos、randn等函数生成。
2. 使用dct函数对信号进行离散余弦变换,得到频域信号向量X。
3. 使用idct函数对频域信号向量X进行反变换,得到原始信号向量x1。
4. 使用plot函数将原始信号向量x和反变换后的信号向量x1绘制在同一张图上,进行对比。
通过上述步骤,我们可以使用matlab轻松实现傅里叶变换和离散余弦变换。
这些技术在信号处理、图像处理、音频处理等领域中得到广泛应用,掌握这些技术将有助于我们更好地理解和应用相关领域的算法。
LMS类自适应算法LMS(最小均方算法)是一种自适应算法,用于根据输入数据的统计特性,自动调整系统参数以达到最佳性能。
LMS算法的主要目标是最小化均方误差(MSE),它在各种应用中都得到了广泛的应用,包括自适应滤波、信号处理和通信系统等。
LMS算法基于梯度下降的思想,通过反复调整系统参数,来不断逼近最小均方误差的目标。
LMS算法的关键是通过观察输入数据和系统输出之间的误差,来估计相应的梯度信息,并以此来调整系统参数。
具体而言,LMS算法根据如下的迭代公式进行更新:w(n+1)=w(n)+μ*e(n)*x(n)其中w(n)是参数矢量的估计值,μ是步长参数,e(n)是误差信号,x(n)是输入信号。
通过不断重复上述迭代过程,LMS算法能够逐步改善系统性能,并收敛到最优解。
LMS算法的自适应性体现在参数调整的过程中。
由于输入数据是实时提供的,所以LMS算法能够动态地跟随输入数据的变化,从而适应不同的统计特性。
步长参数μ的选取也是一个关键的问题,它决定了系统的收敛速度和稳定性。
一般而言,如果步长参数过大,系统可能无法收敛;如果步长参数过小,系统收敛速度较慢。
因此,需要选择适当的步长参数才能获得最佳的性能。
LMS算法在自适应滤波中有着广泛的应用。
自适应滤波主要用于信号去噪和系统辨识等问题。
在信号去噪中,LMS算法通过从输入信号中估计噪声的统计特性,来自动抑制噪声成分,从而提高信号质量。
在系统辨识中,LMS算法能够自动估计系统的冲激响应,从而实现对输入信号的准确重建。
除了自适应滤波,LMS算法还被广泛应用于信号处理和通信系统中。
在信号处理中,LMS算法可以用于自适应降噪、自适应模拟滤波和自适应均衡等问题。
在通信系统中,LMS算法可以用于自适应预编码和自适应均衡,以提高通信系统的传输性能。
总之,LMS类自适应算法是一种非常有效的自适应算法,通过不断调整系统参数,能够实现对输入数据的自动适应。
它在各种应用中都有广泛的应用,尤其在自适应滤波、信号处理和通信系统中具有重要的地位。
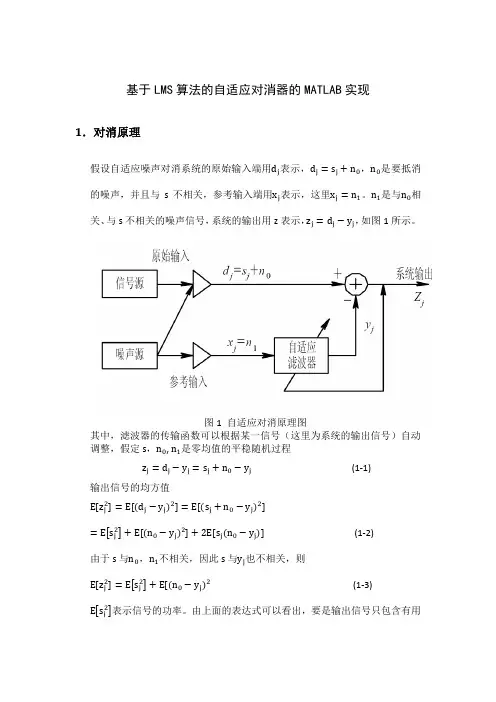
自适应滤波matlab什么是自适应滤波?自适应滤波是一种信号处理方法,其主要目的是通过根据信号的特性动态调整滤波器参数,从而提高信号处理的效果。
与传统的固定滤波器相比,自适应滤波器可以更好地适应信号的变化,从而实现更高的滤波性能。
自适应滤波器的基本原理是:根据输入信号和期望输出信号之间的差别,调整滤波器的权值,使得输出信号与期望输出信号之间的差别最小化。
通过不断迭代这个过程,自适应滤波器会自动调整权值,从而达到最优的滤波效果。
自适应滤波在许多领域都有广泛的应用,比如语音信号处理、图像处理、雷达信号处理等。
在这些应用中,信号通常会受到噪声、干扰等因素的干扰,而自适应滤波可以有效地减少这些干扰,提取信号中的有用信息。
在Matlab中,有多种方法可以实现自适应滤波。
下面将介绍一种常用的自适应滤波方法——最小均方(LMS)自适应滤波算法的Matlab实现步骤。
首先,在Matlab中,我们可以使用内置的函数“nlms”来实现LMS自适应滤波。
nlms函数的语法如下:matlaby = nlms(x, d, L, mu)其中,x是输入信号,d是期望输出信号,L是滤波器的长度,mu是步长因子。
接下来,我们需要准备输入信号和期望输出信号。
可以使用Matlab中的随机数函数来生成一个输入信号,例如:matlabN = 1000; 输入信号长度x = randn(N, 1);假设我们期望输出信号是输入信号的加权和,可以定义一个权值向量w,然后计算期望输出信号:matlabw = [0.3, 0.5, 0.2]; 权值向量d = filter(w, 1, x);在这里,使用filter函数可以将输入信号与权值向量进行卷积,得到期望输出信号。
接下来,我们可以使用nlms函数来实现自适应滤波。
首先,我们需要初始化滤波器的权值向量w0,可以将其设为全零向量:matlabw0 = zeros(L, 1); 初始权值向量然后,我们可以调用nlms函数进行自适应滤波:matlaby = nlms(x, d, L, mu);其中,L是滤波器的长度,mu是步长因子。
基于LMS算法的自适应线性均衡器设计摘要:在信息业快速发展的今天,进行快速准确的通信是各个行业的基本要求。
影响移动通信质量和通信速度的一个重要因素是码间干扰,即串扰。
在一个实际的通信系统中,基带传输系统不可能完全满足理想的波形传输无失真条件,因而串扰几乎是不可避免的。
对串扰进行校正的电路称为均衡器,其实质是信道的一个逆滤波器。
信道均衡器是通信系统中一项重要的技术,它能够很好的补偿信道的非理想特性,从而减轻信号的畸变,降低误码率。
在高速通信、无线通信领域,信道对信号的畸变将更加的严重,因此信道均衡技术是不可或缺的。
本文介绍了自适应均衡器的基本理论、最小均方(LMS)算法的原理与设计、自适应的基本原理、线性均衡器的基本理论与设计,并结合归一化(NLMS)算法、递归最小二乘法(RLS)算法对最小均方(LMS)算法作了进一步说明,最终用MATLAB对基于LMS算法的自适应线性均衡器进行了仿真设计。
关键词:LMS算法;自适应;线性均衡器;(NLMS)算法;(RLS)算法LMS Algorithm Based on Adaptive LinearEqualizer DesignAbstract:The rapid development of information industry today, for fast and accurate communication is the basic requirement of various industries. Affect the quality of mobile communications and the communication speed is an important factor in inter-symbol interference, that is, crosstalk. In a practical communication system, base-band transmission system can not fully meet the ideal conditions for wave transmission without distortion, thus crosstalk is almost inevitable. The crosstalk correction circuit called equalizer, and its essence is an inverse channel filter. Channel equalizer is an important communication systems technology, it can be well compensated non-ideal characteristics of the channel, thereby reducing the signal distortion, reduce the error rate. In the high-speed communications, wireless communications, channel distortion of the signal will be more serious, so the channel equalization is indispensable.This article describes the basic theory of adaptive equalizer, the minimum mean square (LMS) algorithm and design principles, basic principles of adaptive linear equalizer of the basic theory and design, combined with normalized (NLMS) algorithm, recursive least squares (RLS) algorithm for least-mean-square (LMS) algorithm was further described, and ultimately using MA TLAB LMS algorithm based adaptive linear equalizer for simulation design.Key words:LMS algorithm; Adaptive; Linear equalizer; (NLMS) Algorithm; (RLS) Algorithm目录第1章绪论 (1)1.1均衡器研究背景及意义 (1)1.2国内外对均衡技术的研究动态 (3)1.3本文研究内容和主要工作 (4)第2章自适应均衡器基本理论 (5)2.1通信系统中的失真分析 (5)2.1.1、数字基带传输系统模型 (5)2.1.2通信系统中的噪声干扰 (5)2.1.3、通信系统的传输特性 (7)2.1.4、均衡技术 (8)2.2自适应滤波原理 (8)2.2.1、自适应滤波器的分类 (8)2.2.2、自适应滤波器的基本构成 (9)2.2.3、与普通滤波器的区别 (9)2.2.4、自适应过程 (10)2.3自适应滤波结构 (10)2.3.1、滤波器的实现结构 (11)第3章基于LMS算法自适应均衡原理 (14)3.1最小均方(LMS)算法基本原理 (14)3.1.1、最佳滤波器准则 (14)3.1.2MMSE准则 (14)3.1.3LMS迭代算法 (16)3.2最小均方(LMS)算法的性能分析 (18)3.2.1LMS算法的稳定性 (18)3.2.2LMS算法的收敛速度 (20)3.2.3LMS算法的性能学习曲线及稳态误差 (21)第4章基于LMS自适应均衡算法仿真 (23)4.1MATLAB简介 (23)4.2LMS算法的自适应均衡的计算机仿真实现 (23)4.2.1信道失真参数W(特征值分散)对系统的收敛性和稳态性的影响 (25)4.2.2迭代步长 对系统的收敛性和稳态性的影响 (27)4.2.3横向自适应滤波器的抽头数M对系统的收敛性和稳态性的影响 (28)第5章归一化LMS算法与RLS算法 (31)5.1基于LMS算法的归一化LMS算法 (31)5.1.1NLMS算法基本理论简介 (31)5.2.2RLS算法与LMS算法仿真比较 (31)5.2RLS算法的自适应均衡的计算机仿真实现 (32)5.2.1RLS算法基本理论简介 (32)5.2.2RLS算法与LMS算法仿真比较 (33)第6章结论 (35)致谢 (37)参考文献 (38)附录1 (39)第1章绪论1.1 均衡器研究背景及意义在信息业快速发展的今天,进行快速准确的通信是各个行业的基本要求。
matlab 自适应滤波自适应滤波是一种信号处理技术,它能够根据输入信号的统计特性自动调整滤波器的参数,从而适应不同的环境和噪声条件。
在MATLAB中,我们可以利用信号处理工具箱中的函数实现自适应滤波,例如`nlms`和`rls`函数。
自适应滤波的基本原理是根据输入信号和误差信号的统计特性,通过不断调整滤波器的系数来最小化误差信号的方差。
根据滤波器的更新策略的不同,自适应滤波可以分为最小均方(LMS)算法和递归最小二乘(RLS)算法。
LMS算法是一种迭代算法,每一次迭代都会根据当前输入信号和误差信号来更新滤波器的系数。
MATLAB中的`nlms`函数可以实现LMS算法的自适应滤波。
在使用`nlms`函数时,需要指定输入信号、期望信号(即原始信号),以及滤波器的初始系数。
然后,`nlms`函数会根据输入信号的样本数据和期望信号来计算滤波器的输出信号,并根据差错信号的信息来更新滤波器的系数。
通过多次迭代,滤波器的系数逐渐趋于收敛,从而得到去噪后的信号。
RLS算法是一种基于递归估计的算法,它能够根据过去的输入信号和误差信号的历史数据来计算滤波器的系数。
MATLAB中的`rls`函数可以实现RLS算法的自适应滤波。
在使用`rls`函数时,需要指定输入信号、期望信号(即原始信号),以及滤波器的初始系数。
然后,`rls`函数会根据输入信号和期望信号的历史数据来计算滤波器的系数,并根据当前输入信号和期望信号来计算滤波器的输出信号。
通过递归计算和数据更新,滤波器的系数会不断调整,从而得到去噪后的信号。
自适应滤波在信号处理中具有广泛的应用。
例如,在通信系统中,自适应滤波可以用于抑制信道噪声和多路径干扰,提高信号的质量和可靠性。
在医学影像处理中,自适应滤波可以用于去除图像中的噪声,提高图像的清晰度和对比度。
此外,自适应滤波还可以用于语音信号处理、雷达信号处理、机器视觉等领域。
总结来说,MATLAB中的自适应滤波函数`nlms`和`rls`可以实现信号的去噪和滤波。
离散余弦变换(dct)及其实现今天一起来探索一个很有趣的东西,叫离散余弦变换,简称DCT。
那啥是离散余弦变换?就用一个简单的小例子来说说。
想象一下,你有一盒彩色的积木,每块积木都有不同的颜色和形状。
现在,你想用这些积木搭出一个漂亮的小房子。
离散余弦变换,就有点像把这些积木按照一定的规则重新排列组合,让它们变成另一种样子,但是最后还能搭出同样的小房子。
比如说,有一组数字,就像1、3、5、7、9这样。
离散余弦变换,会把这组数字变成另外一组看起来不太一样的数字,但是,当我们需要的时候,又能通过一种特殊的方法把它变回原来的1、3、5、7、9 。
这就好像是给数字们玩了一个“变身游戏”,变完身之后还能变回来。
那离散余弦变换有啥用?它在很多地方都很有用。
就像在图片处理里,它能帮我们把图片变得更小,但是又不会让图片看起来模糊不清。
比如说,你有一张特别大的照片,里面有好多好多的小点点(像素),离散余弦变换就能把这些小点点按照一定的规则重新整理一下,去掉一些不太重要的信息,这样照片就变小了,但是我们还是能清楚地看到照片里的内容,是不是很神奇?接下来,再来说说怎么实现离散余弦变换。
这就好比我们知道了游戏规则,现在要开始玩游戏。
实现离散余弦变换,我们可以用一些简单的数学公式来帮忙。
不过这些公式对于小学生来说可能有点复杂,就简单了解一下就行。
比如说,有一个简单的离散余弦变换公式,就像一个魔法咒语一样。
当我们把数字放进这个“魔法咒语”里,经过一些计算,数字就会变身。
就像你把一个苹果放进一个神奇的盒子里,拿出来的时候就变成了一个橙子一样,数字也会变成另外一组不一样的数字。
在实际生活中,很多软件和工具都能帮我们实现离散余弦变换。
比如说,一些图片编辑软件,当你把一张大图片放进软件里,软件就会自动用离散余弦变换的方法把图片变小,这样就节省了很多空间。
离散余弦变换是不是很有趣?虽然它听起来有点复杂,但是通过这些简单的例子,我们也能大概了解它是怎么回事。
基于LMS算法的自适应线性均衡器设计自适应线性均衡器(Adaptive Linear Equalizer)是一种用于解决通信系统中信号传输过程中引起的衰落、多径干扰和色散等问题的数字信号处理技术。
其中,最常用的算法就是最小均方算法(LMS算法)。
本文将对基于LMS算法的自适应线性均衡器设计进行详细探讨,以便进一步理解该技术的原理和应用。
自适应线性均衡器的设计目标就是使得接收到的信号尽可能接近发送信号。
在传输过程中,信号可能受到多径干扰、噪声和失真等因素的影响。
自适应线性均衡器的任务就是根据接收信号的特征自动调整其内部权值,以最小化输出信号与原始信号之间的误差。
LMS算法是一种基于梯度下降的迭代算法,它通过最小化均方(Mean Square Error,MSE)误差来更新权值。
LMS算法的基本思想是根据误差信号的梯度来调整权值,从而最小化误差。
在自适应线性均衡器中,LMS算法的实现需要以下步骤:1.定义输入信号和目标信号:将输入信号表示为x(n),目标信号(即发送信号)表示为d(n)。
2.初始化权值向量:将权值向量w(n)初始化为一个较小的初值,通常为零。
3.计算估计输出:根据当前权值向量,计算自适应线性均衡器的估计输出y(n)。
4.计算误差信号:将估计输出与目标信号进行比较,计算误差信号e(n)。
5.更新权值向量:根据误差信号的梯度计算出权值的变化量,并将其加到当前的权值向量上,得到新的权值向量。
6.重复步骤3到步骤5,直到收敛或达到预设的迭代次数。
自适应线性均衡器的设计中,一些关键问题需要考虑:1.学习率:学习率决定了权值的更新速度,过大的学习率可能导致不稳定性,而过小的学习率则会导致收敛速度过慢。
因此,需要根据实际情况选择合适的学习率。
2.初始权值:初始权值的选择可能会影响算法的收敛速度和性能。
通常可以将初始权值设置为零或一个随机小值,然后通过迭代调整权值。
3.触发更新:权值的更新可以在每个符号周期内进行,也可以在每个数据块周期内进行。
(一)摘要
均衡技术最早应用于无线电通信领域,主要用于消除由于信道响应引起的码
间干扰(ISI)。二十世纪六十年代后期,基于最小均方误差(LMS)算法的自适
应均衡就已经得到了描述。最小均方算法即LMS算法由于实现简单且对信道统计
特性变化具有稳健性,LMS算法获得了极为广泛的应用。LMS算法是基于最小均
方误差准则(MMSE)的维纳滤波器和最陡下降法提出的。本次实训主要研究的是
酋变换基于离散余弦变换[(DCT)的频域自适应算法-离散余弦变换最小均方算
法(DCT-LMS),在不增加算法计算的复杂度情况下,来改善自适应均衡滤波器的
性能。
关键字:自适应均衡、LMS、DCT-LMS
(二)DCT-LMS算法原理
图1给出了变换域自适应滤波器的结构。当采用DCT变换酋矩阵对输入信号
矢量进行酋变换[9][23],得到
)()(nnSxu
其中S是一MM的DCT变换酋矩阵,即
ISSH
式中, 是一个大于0的标量,上标H表示矩阵的共轭转置。变换后的输
入数据变为)(nu。对应地,酋变换后的权向量w变为
Sww1
它就是我们需要更新估计的离散余弦变换域自适应滤波器的权向量。因此原
预测误差)()()(ˆ)()(nndnyndneHxw可以改用变换后的输入数据向量
)(nu
和滤波器权向量w写为
)()()(nndneHuw
将变换前后的输入数据向量)(nx和)(nu比较知,原信号向量的元素是
)1(inx
的移位形式,它们的相关性强,而
T
Mnununun)](,),(),([)(21
u
的元
素则相当于M信道的信号,可以期望,它们具有比原信号)(nx更弱的相关性。
换言之,通过DCT酋变换,在变换域实现了某种程度的解相关。
1wMw)(nx)1(nx)1(Mnx1z1z1z()yn酋变换2
w
)(1nu)(2nu)(nu
M
图1 变换域FIR横式滤波器
从滤波器的角度讲,原来的单信道M阶FIR横向滤波器被变换成了一等价
M信道滤波器,而原来的输入信号)(nx则相当于通过一含有M
个滤波器的滤波
器组。
总结以上分析,很容易得到离散余弦变换最小均方算法(DCT-LMS)的流程如
下:
⑴ 初始化:TM]000[ˆw
⑵ 给定DCT变换酋矩阵S,更新:,2,1n
)()(nnSxu
)()()()(nnndneHuw
)()(2)(ˆ)1(ˆnnennuww
研究DCT-LMS算法性能的自适应均衡系统仿真模型如图2所示。
数据发生器信道
延迟
D
自适应
均衡器噪声发生器LMS()hn()xn()yn()vn()en()snˆ()ynDCT()unDCT)()(Dnynyd逆DCT
)(nw
图2 研究DCT-LMS算法性能的自适应均衡系统仿真框图
(三)系统SIMULINK仿真
(四)不同参数对系统的影响曲线
1.横向自适应滤波器的抽头数M对系统的收敛性和稳态性的影响
结论:抽头数M值越大,系统误码率越高。
2.不同u值对系统的收敛性和稳态性的影响
结论:由于系统误码率与收敛性有关系,迭代算法跳步u值对系统误码率的影响需要折中考
虑。
3.信道失真参数W对系统的收敛性和稳态性的影响。
结论:信道参数越大,系统误码率越高。
4、特性曲线比较