Linux字符设备驱动学习总结
- 格式:docx
- 大小:65.77 KB
- 文档页数:4

嵌入式linux开发课程设计一、课程目标知识目标:1. 理解嵌入式Linux系统的基本概念、原理和架构。
2. 掌握嵌入式Linux开发环境的搭建与使用。
3. 学习嵌入式Linux内核配置、编译与移植方法。
4. 掌握常见的嵌入式Linux设备驱动编程技术。
技能目标:1. 能够独立搭建嵌入式Linux开发环境。
2. 熟练运用Makefile、交叉编译工具链进行代码编译。
3. 能够编写简单的嵌入式Linux设备驱动程序。
4. 学会分析并解决嵌入式Linux开发过程中的常见问题。
情感态度价值观目标:1. 培养学生对嵌入式系统开发的兴趣,提高学习积极性。
2. 培养学生的团队协作意识,增强沟通与表达能力。
3. 培养学生勇于克服困难,面对挑战的精神。
分析课程性质、学生特点和教学要求:本课程为高年级专业课程,要求学生具备一定的C语言基础和计算机硬件知识。
课程性质为理论与实践相结合,注重培养学生的实际动手能力。
针对学生特点,课程目标设定了明确的知识点和技能要求,旨在使学生能够掌握嵌入式Linux开发的基本方法,为后续项目实践和职业发展奠定基础。
课程目标分解为具体学习成果:1. 学生能够阐述嵌入式Linux系统的基本概念、原理和架构。
2. 学生能够自主搭建嵌入式Linux开发环境,并进行简单的程序编译与运行。
3. 学生能够编写简单的嵌入式Linux设备驱动程序,并实现相应的功能。
4. 学生能够针对嵌入式Linux开发过程中遇到的问题,提出合理的解决方案,并进行实际操作。
二、教学内容1. 嵌入式Linux系统概述- 嵌入式系统基本概念- 嵌入式Linux的发展历程- 嵌入式Linux系统的特点与优势2. 嵌入式Linux开发环境搭建- 交叉编译工具链的安装与配置- 嵌入式Linux文件系统制作- 常用开发工具的使用(如Makefile、GDB)3. 嵌入式Linux内核与驱动- 内核配置与编译- 内核移植方法- 常见设备驱动编程(如字符设备、块设备、网络设备)4. 实践项目与案例分析- 简单嵌入式Linux程序编写与运行- 设备驱动程序编写与调试- 分析并解决实际问题(如系统性能优化、故障排查)教学内容安排与进度:1. 嵌入式Linux系统概述(2课时)2. 嵌入式Linux开发环境搭建(4课时)3. 嵌入式Linux内核与驱动(6课时)4. 实践项目与案例分析(8课时)本教学内容基于课程目标,结合教材章节内容,注重理论与实践相结合,旨在培养学生的实际动手能力和解决问题的能力。

嵌入式软件工作总结第1篇学期开始,我们开始学习《嵌入式系统及应用》,由于初次接触嵌入式系统,感觉蛮难的,所以收获不是很大,很多的概念都比较模糊,等到学期结束开始做嵌入式课程设计时,真是茫然无从下手,自从拿到设计主题后,我就像热锅上的蚂蚁,一个字_急_。
最后实在没有办法,逼着自己去学习,查资料,总算对嵌入式有了浅层理解。
嵌入式系统本身是一个相对模糊的定义,一个手持的Mp3和一个pC104的微型工业控制计算机都可以认为是嵌入式系统。
总体来说,嵌入式系统是_用于控制,监视或者辅助操作机器和设备的装备_。
一个典型的桌面Linux系统包括3个主要的软件层———linux内核、C库和应用程序代码。
内核是唯一可以完全控制硬件的层,内核驱动程序代表应用程序与硬件之间进行会话。
内核之上是C库,负责把pOSIXApI转换为内核可以识别的形式,然后调用内核,从应用程序向内核传递参数。
应用程序依靠驱动内核来完成特定的任务。
在了解了基础知识之后,我开始进行上机操作,当然,其中遇到很多的难题,很多东西都是第一次接触,又没有别人在旁边指导操作,完全凭借自己去摸索练习。
其中的困难可想而知。
然而坚持就是胜利,牙一咬眼一闭坚持做下去,而通过本次实验,我感觉收获还是蛮多的。
可能我对于嵌入式的知识学习的还是不太多,但是这之外的东西收获颇丰。
它让我学会了如何通过自己的努力去认知一个新事物,更重要的是端正自己的学习态度,只有真正下功夫去学习,才能有收获,正所谓_一份耕耘,一份收获。
_没有付出,何谈回报呢?再者,通过本次实验,我也学会了如何去分析问题,如何找出自己设计中的不足,继而去排除解决问题,这就是一个自我学习的过程。
当我们通过实验去学习理论知识时,自己动手得出的结论,不仅能加深我们对嵌入式的理解,更能加深我们对此的记忆。
当然,在这其中,我也发现自己的许多不足之处,由于学期伊始我没有好好学习,才落到如此地步,这也可以说是一个教训吧!我相信在以后的学习工作中,我一定会端正自己的学习态度,一丝不苟的去对待每一件事。

初级驱动试题选择题(每题4分,共40分,包括单选和多选,多选、少选均不得分)1. Linux系统中将设备进行分类管理,下列设备中哪些属于字符设备,哪些属于块设备?[A] 键盘[B] 硬盘[C] 闪存设备[D] 帧缓存设备[E] 网卡答案:字符设备(A、D),块设备(B、C)2. Linux系统中,内核以什么区分设备?[A] 设备节点名[B] 设备类名称[C] 设备名称[D] 设备号答案:D3. Linux系统中设备节点可以创建在哪里?[A] /dev目录下[B] 根目录下[C] /tmp目录下[D] 以上都可以答案:D4. Linux驱动程序运行在哪里?[A] 内核空间[B] 用户空间[C] 内核空间和用户空间答案:A5. Linux系统中设备驱动程序是以模块形式组的,编译驱动时可以用哪种方式编译?[A] 静态编译进内核[B] 动态编译[C] 编译成可执行文件答案:A、B6. Linux 2.6.35内核中,设备的主设备号用多少位来表示,次设备号用多少位来表示?[A] 8[B] 12[C] 16[D] 20答案:主设备号(B),次设备号(D)7. Linux系统中哪些种类的设备有设备节点?[A] 定时器[B] 字符设备[C] 块设备[D] 网络设备答案:B、C8. 通常情况下,kmalloc函数能分配的最大内存是多少?[A] 4K[B] 64K[C] 128K[D] 4M答案:C9. 能保证物理空间上连续的内存分配函数是哪些?[A] __get_free_pages[B] kmalloc[C] vmalloc[D] malloc答案:A、B10. Linux系统中通过add_timer添加的timer是什么类型的?[A] 一次的[B] 循环的[C] 以上两种都可以答案:A简答题(每题6分,共60分)1. Linux系统中以模块方式组织设备驱动程序,请列举在一个模块程序中必不可少的组成部分。
(可以写一个Hello world模块的程序)答案:```cinclude <linux/init.h>include <linux/kernel.h>include <linux/module.h>static int __init fsmod_init(void){printk(KERN_INFO "Hello, Farsight!\n");return 0;}static void __exit fsmod_exit(void){printk(KERN_INFO "Goodbye, Farsight!\n");}module_init(fsmod_init);module_exit(fsmod_exit);MODULE_LICENSE("Dual BSD/GPL");MODULE_AUTHOR("Kevin Jiang<>");MODULE_DESCRIPTION("This is an example for linux driver module");```2. 请从定义、性质、操作方式等方面对比说明字符设备和块设备。

实验二Linux的基本命令操作及vi的使用实验目的:1、熟悉Linux操作系统环境2、熟悉Linux操作系统的文件结构3、熟悉Linux操作系统的基本命令4、熟悉Linux操作系统的文件组织方式5、学习使用vi编辑器建立、编辑、显示以及加工处理文本文件。
实验内容及要求:1、登陆实验室的Linux服务器。
启动电脑,进入Windows操作系统,在“开始”-〉“运行"中输入“Telnet 10。
200.41。
178”,即可登陆实验室的Linux服务器.在“Login:”提示后输入“stu”+学号(如02号同学输入stu02),按下回车键。
在“Password:”提示后输入“123”(注意输入密码时屏幕上不会有“*”等符号出现,这和Windows 不同),按下回车键,若出现“[os@ root os]$”或“—bash—2.05b$”,表示已成功登陆系统,可以开始输入指令操作。
思考:(用pwd指令)查看自己登陆后位于Linux的哪个目录,写出该目录的路径,与自己周围的同学比较,看是否相同.(可查阅Linux资料了解“/home”目录的功能介绍)2、在Linux中进行以下基本操作:1)在当前目录下新建一个名为(自己姓名首字母缩写+学号后3位数)的子目录.写出你所用的指令.(例如:mkdir zq000 )2)进入刚创建的子目录环境下。
(提示:指令cd)3)在刚创建的子目录下新建一个名为abc.txt的文件。
写出你所用的指令。
(提示:新建文件的指令是touch)4)将/目录下(即根目录下)的welcome.txt文件复制到自己的子目录下,写出你所用的指令。
cp –i /root/stu62/abc.txt /home/welcome。
txt5)写出welcome.txt文件的内容。
(提示:用cat指令查看)Hello, Boys and girls , welcome to the wonderful Linux world!3、在Linux中进行以下基本操作:1)进入自己的主目录。
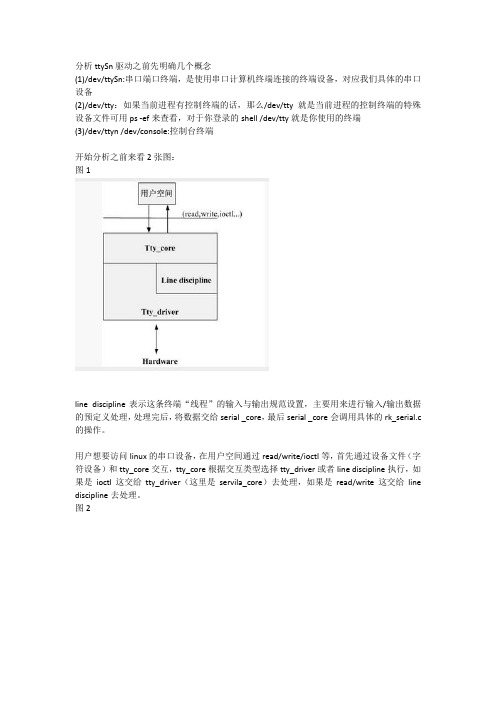
分析ttySn驱动之前先明确几个概念(1)/dev/ttySn:串口端口终端,是使用串口计算机终端连接的终端设备,对应我们具体的串口设备(2)/dev/tty:如果当前进程有控制终端的话,那么/dev/tty就是当前进程的控制终端的特殊设备文件可用ps -ef来查看,对于你登录的shell /dev/tty就是你使用的终端(3)/dev/ttyn /dev/console:控制台终端开始分析之前来看2张图:图1line discipline表示这条终端“线程”的输入与输出规范设置,主要用来进行输入/输出数据的预定义处理,处理完后,将数据交给serial _core,最后serial _core会调用具体的rk_serial.c 的操作。
用户想要访问linux的串口设备,在用户空间通过read/write/ioctl等,首先通过设备文件(字符设备)和tty_core交互,tty_core根据交互类型选择tty_driver或者line discipline执行,如果是ioctl这交给tty_driver(这里是servila_core)去处理,如果是read/write这交给line discipline去处理。
图2再看第二张图,一个uart_driver通常会注册一段设备号.即在用户空间会看到uart_driver对应有多个设备节点。
例如:/dev/ttyS0 /dev/ttyS1 每个设备节点是对应一个具体硬件的,这样就可做到对多个硬件设备的统一管理,而每个设备文件应该对应一个uart_port,也就是说:uart_device要和多个uart_port关系起来。
并且每个uart_port对应一个circ_buf(用来接收数据),所以uart_port 必须要和这个缓存区关系起来。
有了上面的理解,我们开始进入代码去研究具体的实现过程以RK3288 平台作为媒介去研究tty_core源码在:kernel/drivers/tty/tty_io.c这个文件主要将tty注册成一个char dev,对应上面的tty_core的部分。
Articles from LinkSprite学习中心Linux ALSA声卡驱动之四:Control设备的创建2014-03-08 17:03:48 z ou, baoz huControl接口Cont rol接口主要让用户空间的应用程序(alsa-lib)可以访问和控制音频codec芯片中的多路开关,滑动控件等。
对于Mixer(混音)来说,Cont rol接口显得尤为重要,从ALSA 0.9.x版本开始,所有的mixer工作都是通过cont rol接口的API来实现的。
ALSA已经为AC97定义了完整的控制接口模型,如果你的Codec芯片只支持AC97接口,你可以不用关心本节的内容。
<sound/cont rol.h>定义了所有的Cont rol API。
如果你要为你的codec实现自己的cont rols,请在代码中包含该头文件。
Controls的定义要自定义一个Cont rol,我们首先要定义3各回调函数:inf o,get和put。
然后,定义一个snd_kcont rol_new结构:static struct snd_kcontrol_new my_control __devinitdata = { .iface = SNDRV_CTL_ELEM_IFACE_MIXER,.name = "PCM Playback Switch",.index = 0,.access = SNDRV_CTL_ELEM_ACCESS_READWRITE,.private_value = 0xffff,.info = my_control_info,.get = my_control_get,.put = my_control_put};if ace字段指出了cont rol的类型,alsa定义了几种类型(SNDDRV_CT L_ELEM_IFACE_XXX),常用的类型是MIXER,当然也可以定义属于全局的CARD类型,也可以定义属于某类设备的类型,例如HWDEP,PCMRAWMIDI,T IMER等,这时需要在device和subdevice字段中指出卡的设备逻辑编号。
video caputure device linux v4l2 API usag对于linux下的一个v4l2设备编程一般包括以下步骤:1)打开设备2)改变设备属性,选择一个视频和声音输入(有时候一个物理设备可能包括多个视频和声音输入)、视频标准、图像亮度等。
3)和驱动协商一个数据格式4)和驱动协商输入输出方法(read,write,mmap,User Pointers,DMA buffer importing,等)5)数据的输入输出循环(获取数据)6)关闭设备注:实际编程的步骤是依赖具体的属于那种设备,例如,Video Capture,Video Overlay ,Video Output,Video Output Overlay,Codec,Effect Devices,Raw VBI Data,Sliced VBI Data,Teletext ,Radio,RDS,Event,Sub-device本文主要翻译有关caputure device 部分。
视频捕捉设备对视频模拟信号采样,将采样得到的数字信号存储在内存中。
现在几乎所有的视频捕捉设备能够在每秒捕捉25到30帧。
按照惯例,v4l2视频捕捉设备能够通过名为/dev/video0--/dev/video63(其主设备号为81,此设备号从0到63)的特殊字符设备文件来访问。
通常,、/dev/video一般符号链接到优先选用的视频设备。
注意,相同的设备文件被视频输出设备使用。
(不懂?)1)打开和关闭设备分别用open(),和close()函数2)因为v4l2覆盖很多中设备,不是所有的API可以应用到所有设备上的,此外,相同种类的设备可能有不同的能力。
querying capabilities可以让我们忽略一些复杂难懂而且不是太重要的API。
所有的v4l2驱动都支持VIDIOC_QUERYCAP命令,应用程序也应该在打开设备后,用ioctl()函数调用此命令。
Linux字符设备驱动 1、 字符设备 cdev结构体 在Linux2.6内核中使用cdev结构体描述字符设备,cdev结构体定义如下: struct cdev { struct kobject kobj; //内嵌的kobject对象 struct module *owner; //所属模块 struct file_operations *opt;//文件操作结构体,定义了字符设备驱动提供给虚拟文件系统的接口函数 struct list_head list; dev_t dev; //设备号(32位,高12位为主设备号,低20位为次设备号)
ev_t通过主次设备号生成d minor)int major,MKDEV(int 备号从dev_t获得次设 dev) tMINOR(dev_ 备号从dev_t获得主设 dev) tMAJOR(dev_
unsigned int count; }; 操作cdev函数: 内核提供了一组函数用于操作cdev结构体,如下: void cdev_init(struct cdev *,struct file_operation *); 用于初始化cdev的成员,并建立和file_operation之间的连接。 struct cdev *cdev_alloc(void); 用于动态申请一个cdev内存。 void cdev_put(struct cdev *p); int cdev_add(struct cdev *,dev_t, unsigned); 向系统添加一个cdev void cdev_del(struct cdev *); 从系统删除一个cdev 申请设备号: 在调用cdev_add()函数向系统注册字符设备之前,调用申请函数向系统申请设备号。 int register_chrdev_region(dev_t from, unsigned count, const char *name);用于已知设备号的情况; int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count,const char *name); 用于设备号未知,向系统动态的申请未被占用的设备号的情况; 释放设备号: void unregister_chrdev_region(dev_t from, unsigned count);在调用cdev_del()函数从系统注销字符设备之后调用以释放原先申请的设备号。 file_operation结构体: file_operationh结构体中的成员函数是字符设备驱动程序设计的主体内容,这些函数实际会在应用程序进行Linux的open()、write()、read()、close()等系统调用时最终被调用,这里对其主要的成员进行介绍: loff_t (*llseek)(struct file *,loff_t,int);用来修改一个文件的当前读写位置,并将新位置返回,在出错时,返回一个负值。对文件的起始位置(int)可以是文件开头(SEEK_SET,0)、当前位置(SEEK_CUR,1)和文件结尾(SEEK_END,2),loff_t为偏移量。 ssize_t (*read)(struct file *,char __user *,size_t, loff_t *);用来从设备中读取数据,成功时函数返回读取的字节数,出错时返回一个负值。 ssize_t (*write)(struct file *,const char __user *,size_t, loff_t *);用来向设备发送数据,成功时返回写入的字节数,如果未实现,当用户进行write()系统调用时,将得到-EINVAL返回值。 int (*ioctl) (struct inode *, struct file *,unsigned int, unsigned long);提供设备相关控制命令的实现(既不是读操作也不是写操作),当调用成功时,返回给系统一个非负值。内核本身识别部分控制命令,而不必调用设备驱动中的ioctl()。如果设备不提供ioctl()函数,对于内核不能识别的命令,用户进行ioctl()系统调用时将获得-EINVAL返回值。其中第三个参数是事先定义的I/O命令(Linux系统建议如下表方式定义ioctl()的,命令码),第四个参数是该命令的参数。 设备类型 8bit大小,可以是0到0xff之间的值,内核中的ioctl_number.txt给出了一些推荐的和已经被使用的,新设备驱动定义时要避免与其冲突 序列号 8bit大小 方向 2bit,表示数据传送的方向,可能的值是_IOC_NONE(无数据传输)、_IOC_READ(读)、_IOC_WRITE(写)、_IOC_READ|_IOC_WRITE(双向) 数据尺寸 13/14bit,表示涉及的用户数据的大小
2、 字符设备驱动 在linux系统中,字符设备驱动由字符设备驱动模块加载和卸载函数以及字符设备驱动的file_operation结构体中成员函数等几部分组成。 字符设备驱动模块加载和卸载函数 在字符设备驱动模块架子函数中应该事先设备号的申请和cdev的注册,而在卸载函数中实现设备号的释放和cdev的注销。常见的设备结构体、模块加载和卸载函数如下: //设备结构体 struct xxx_dev_t { struct cdevcdev; … };xxx_dev; //设备驱动模块加载函数 static int __init xxx_init(void) { … cdev_init(&xxx_dev.cdev, &xxx_fops); //初始化cdev xxx_dev.cdev.owner =THIS_MODULES; //获取字符设备号 if (xxx_major) { register_chrdev_region(xxx_dev_no, 1, DEV_NAME); } else { alloc_chrdev_region(&xxx_dev_no,0,1,DEV_NAME); } ret=cdev_add(&xxx_dev.cdev,xxx_dev_no,1); //注册设备 … } //设备驱动模块卸载函数 static void __exit xxx_exit(void) { unregister_chrdev_region(xxx_dev_no, 1); //释放占用的设备号 cedv_del(&xxx_dev.cdev); //注销设备 … } 字符设备驱动的file_operation结构体中成员函数 file_operation结构体中成员函数是字符设备驱动与内核的接口,大多数字符设备驱动实现read()、write()、ioctl()函数,其形式如下: //读设备 ssize_t xxx_read (struct file *filp, char __user *buf, size_t count, loff_t *f_pos) //filp是文件结构体指针,buf是用户空间内存的地址,count是要读的字节数,f_pos是读的位置相对于文件开头的偏移。 { … copy_to_user(buf, …, …); //完成内核空间到用户空间的复制 … } //写设备 ssize_t xxx_write (struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) //filp是文件结构体指针,buf是用户空间内存的地址,count是要写的字节数,f_pos是写的位置相对于文件开头的偏移。 { … copy_from_user(buf, …, …); //完成用户空间到内核空间的复制 … } //ioctl函数 int xxx_ioctl(struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg) { … switch (cmd) { case XXX_CMD1: … braek; case XXX_CMD2: … braek; default: //不能支持的命令 return –ENOTTY; } return 0; } 在字符设备驱动中,还需要定义一个file_operation的实例,并将具体设备驱动的函数赋值给file_operation的成员,代码如下: struct file_operation xxx_fops = //xxx_fops在初始化中被建立与cdev的连接 { .owner = THIS_MODULE, .read = xxx_read, .write = xxx_write, .ioctl = xxx_ioctl, … }; 下图是字符设备驱动的结构、字符设备驱动与字符设备以及字符设备驱动和用户空间访问该设备的程序之间的关系图
字符设备Cdevdev_tfile_operation
模块加载函数模块卸载函数Linux系统调用用户空间对应初始化/添加
删除
调
用
关系图
间接调用...Ioctl()Write()Read()
绑定