TLD目标跟踪算法
- 格式:pptx
- 大小:1.73 MB
- 文档页数:35
第1期 2018年1月江苏科技信息Jiangsu Science &Technology InformationNo.1January,2018一种改进T L D的目标跟踪算法王铁东,任世卿(沈阳理工大学信息科学与工程学院,辽宁沈阳110159)摘要%目标跟踪是模式识别领域传统且重要的分支。
传统跟踪算法有背景差分法、帧间差分法、卡尔曼 滤波等,而TLD算法从检测和跟踪两个维度,将检测与跟踪的结果同时作用于跟踪,在跟踪任务中展 现出较 。
同时TLD算法的跟踪模 时间 较大的 法。
时间 较大的不足,提出一种改进TLD的目标跟踪算法,将 法代替时间较小的meanshift算法。
结果,方法 有 时间 ,提 目标跟踪 。
关键词:运动目标跟踪;模式识别;检测中图分类号+TP391 文献标识码+A0引言传统目标跟踪方法将跟踪视为单一任务,常见处 理方法有B间差分法[1]、卡尔曼滤波法[2]、光流法[3G 等。
TLD算法[4]从检测和跟踪两个维度出发,将检测 与跟踪结果同时作用于跟踪任务,缺点是跟踪器时间 开销较大。
Meanshift[5]作为经典聚类算法,利用偏移 均值向量不断迭代来 点 。
meanshift缺点是目标 不 。
算法出的冋题,本文提出一^种基于TLD改进的目标跟踪算法。
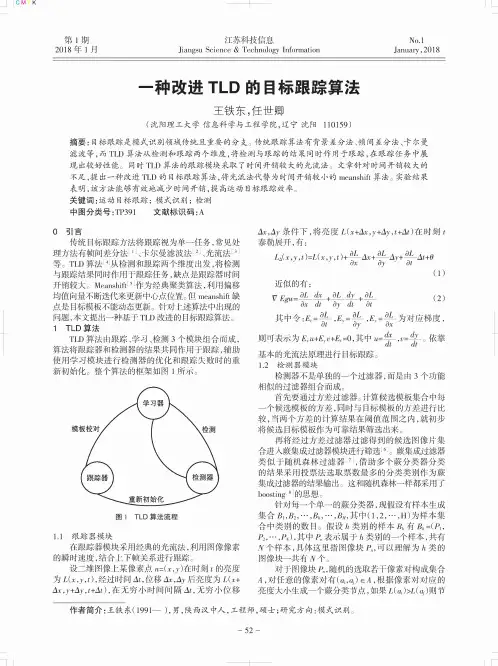
1T LD算法TLD算法由跟踪、、检测3个 ,算法将跟踪器和检测器的结果同作用于跟踪,用 检测器的 和跟踪 时的重。
算法的 1所示。
1.1跟踪模跟踪器 用经 流法,利用图像像素的瞬时 ,结 帧 跟踪。
维 !=(#,$ 时“为 L(#,$,%),经时间!%,移!#,!$ 为L(x+!#,$+!$,%+!%),时间间!%,移!#,!$ ,将壳度 L(#+!#,$+!$,%+!%)在时亥%开,有L!(#,$,%)=L(#,$,%)+!L !#+ !L !$+ !L !%+"ox〇t1的有V Eg*二O x dt0$ dt O t其中令:E%g^L,E$二t,E xot0$则可表为E#,+E$-+Et=0,其中,基本的光流 理进行目标跟踪。
跟踪——学习——检测摘要:本文主要讨论研究视频流中的目标物体的长时间跟踪问题。
在一幅单独的图像帧中,目标物体是由其位置和自身特征所表征的。
在连续的视频帧中,我们的任务就是确定出目标物体的位置和其特征,或者是能够指出目标丢失或遮挡。
我们提出了一个全新的跟踪框架(TLD)。
该框架将目标的长时间的跟踪任务清晰地分解成三个部分,跟踪,学习和检测。
跟踪器在一帧帧的视频帧中跟踪目标。
检测器是将已经检测到的特征(表征目标物体)进行局部化处理,并且根据需要不断修正跟踪器。
学习器估计出检测器的错误,并及时更新检测器,以避免后续再出现这些错误。
我们研究了怎样来识别出或检测出检测器的错误,并且从中进行学习训练。
我们开创了一种全新的学习方法(P-N学习,Positive和Negative),这种方法通过一对约束来估计出错误。
正约束可以检测出是否丢失,负约束可以检测出错误的警告。
整个学习过程可以被看作是一个独立的离散的动态过程模型,并且在该过程模型下我们能够发现学习器所能够带来的效果提升。
在这篇文章中,我们详细阐述了TLD框架和PN 学习的具体实现流程,并通过了大量的测试,结果表明这是一个尖端技术的具有重大意义的改进。
关键词:长期跟踪;视频帧学习;自引导(自适应);实时;半监督学习;1.引言对于一个手持摄像设备录制的视频流中,会有各种各样的移动的物体,物体有时候会从录像视野出现,有时候又会消失。
给定一幅感兴趣的视频帧,用带边框的矩形框来标定目标物体,我们的目的就是能够自动地确定出这个带边框的矩形框或者能够确定出目标物体在接下来的视频帧中是否丢失不可见了。
视频流能够以帧速率来处理,并且整个处理过程能够运行得足够长。
我们把这个任务称作是长时间跟踪,又或者是长期跟踪。
为了能够实现长期跟踪,我们有很多的问题需要解决。
首先,最关键的问题就是目标物体的重新检测,即当目标消失于录像视野后,再重新出现的时候,能否对丢失的目标进行检测。
而且,有时候目标发生了变化,比如说外观形变等,以致使与最开始的目标外在特征不相关,在这种情况下,会让问题变得更加复杂和严峻。

基于角点增强改进的TL D目标跟踪算法孙保基;张葆;宋策;龙思源【期刊名称】《液晶与显示》【年(卷),期】2016(031)009【摘要】A new obj ect tracking algorithm has been proposed which is based on the corner reinforced for the problem of the feature points can’t represent the target effectively in the TLD.The Shi-Tomas corner point has been added into the existing tracking points as the feature points,which is insensitive to the light change and invariant to rotation.When tracker is running,the target will be located by the reserved corner which is tracked by the optical flow and filtered by the error detector.The experiments show that the algorithm can track the target steadily when faced with the target shaking and appearance changing.And the algorithm can effectively prevent the drift tracking caused by the tracking smooth pixels and improve the tracking stability.In addition,a model deleting after j udging system has been proposed for solving the problem of calculated amount increasing and real time de-creasing caused by the online model accumulating during the TLD tracking.The system will delete the unrepresentative models according to the similarity of the target and the online model when the model quantity reaches to a certain amount.The experiments show that the system can decrease the compu-tational complexity effectively,and increase the real time by 20%especially handling with the rapid model updating and longtime tracking circumstances.%针对TLD算法的特征点无法有效表述目标问题,提出了一种基于角点增强改进的TLD目标跟踪算法。
————————————————————————————————————————————————基于改进的TLD目标跟踪算法作者胡欣,高佳丽机构长安大学电子与控制工程学院DOI 10.3969/j.issn.1001-3695.2018.05.0353基金项目国家自然科学基金青年基金资助项目(61701044)预排期卷《计算机应用研究》2019年第36卷第11期摘要针对传统跟踪—学习—检测(tracking-learning-detecting,TLD)目标跟踪算法由于检测模块扫描大量子窗口而导致检测时间过长,并且在跟踪过程中当目标发生严重遮挡、形变时,TLD算法会出现跟踪失败的问题进行了研究,提出改进TLD目标跟踪算法。
改进算法在检测模块前加入ViBe模型预估前景目标,极大地缩小了检测区域。
追踪模块用SIFT特征匹配算法来代替原算法中的光流法,准确跟踪目标避免发生跟踪漂移,减少了计算的复杂度,提高了算法适应环境的能力。
实验表明,改进后的TLD算法运行速度得到提升,并且当目标出现严重遮挡、光照强度剧烈变化时的跟踪精度也得到了很好的改善。
关键词TLD算法;ViBe算法;SIFT特征匹配算法;跟踪漂移作者简介胡欣(1975-)女,副教授,博士,主要研究方向为数字图像处理(791930739@);高佳丽(1994-),女,陕西咸阳人,硕士研究生,主要研究方向为数字图像处理.中图分类号TP391.4访问地址/article/02-2019-11-074.html投稿日期2018年5月6日修回日期2018年6月21日发布日期2018年9月12日引用格式胡欣, 高佳丽. 基于改进的TLD目标跟踪算法[J/OL]. 2019, 36(11). [2018-09-12]./article/02-2019-11-074.html.第36卷第11期 计算机应用研究V ol. 36 No. 11 优先出版Application Research of ComputersOnline Publication——————————收稿日期:2018-05-06;修回日期:2018-06-21 基金项目:国家自然科学基金青年基金资助项目(61701044)作者简介:胡欣(1975-)女,副教授,博士,主要研究方向为数字图像处理(791930739@ );高佳丽(1994-),女,陕西咸阳人,硕士研究生,主要研究方向为数字图像处理.基于改进的TLD 目标跟踪算法 *胡 欣,高佳丽(长安大学 电子与控制工程学院, 西安 710064)摘 要:针对传统跟踪—学习—检测(tracking-learning-detecting ,TLD )目标跟踪算法由于检测模块扫描大量子窗口而导致检测时间过长,并且在跟踪过程中当目标发生严重遮挡、形变时,TLD 算法会出现跟踪失败的问题进行了研究,提出改进TLD 目标跟踪算法。
检测区域动态调整的TLD目标跟踪算法曲海成;单晓晨;孟煜;刘万军【摘要】针对经典跟踪-学习-检测(TLD)目标跟踪算法由于检测区域过大而导致的检测时间过长及对相似目标跟踪处理效果不理想的问题,提出一种检测区域可动态自适应调整的方法——TLD-DO.该方法利用两次Kalman滤波加速度矫正预测的检测区域优化算法DKF,通过缩小TLD检测器检测范围,以达到在跟踪精度略有提升的情况下提高跟踪速度的目的;同时此方法可排除画面内相似目标的干扰,提高在含有相似目标的复杂背景下目标跟踪的准确性.实验结果表明:TLD-DO算法在处理不同视频与跟踪目标时,检测速度有1.31 ~3.19倍提升;对含有相似目标干扰情况下,跟踪效果明显优于原TLD算法;对目标抖动及失真情况有较高的鲁棒性.【期刊名称】《计算机应用》【年(卷),期】2015(035)010【总页数】5页(P2985-2989)【关键词】目标跟踪;TLD算法;检测区域;Kalman滤波;跟踪速度【作者】曲海成;单晓晨;孟煜;刘万军【作者单位】辽宁工程技术大学软件学院,辽宁葫芦岛 125105;辽宁工程技术大学软件学院,辽宁葫芦岛 125105;辽宁工程技术大学软件学院,辽宁葫芦岛 125105;辽宁工程技术大学软件学院,辽宁葫芦岛 125105【正文语种】中文【中图分类】TP391.40 引言在计算机视觉研究领域中,针对视频影像中特定目标的实时跟踪是一个备受关注的前沿问题。
视频目标跟踪从解决方法的角度主要划分为两类:一类是短期跟踪器跟踪(shortterm tracking);一类是长期跟踪器跟踪(long-term tracking)。
短期跟踪器是一种帧到帧(frame-to-frame)短期跟踪方法,其只对视频影像序列中最新的相邻两帧进行处理从而达到跟踪的目的。
光流法[1-2]、帧间差方法[3-4]、颜色直方图法[5-6]这些基于短期跟踪器的方法具有快速、短期跟踪效果明显的特点。
基于机器视觉的TLD目标跟踪算法改进
刘雪飞;蒋蓁
【期刊名称】《工业控制计算机》
【年(卷),期】2018(31)8
【摘要】运动目标跟踪是计算机视觉领域重要的研究内容之一.在经典的半监督学习跟踪算法(跟踪-学习-检测(TLD))的基础上,提出了以下改进:检测模块耗时巨大是TLD算法难以实时的主要原因,结合卡尔曼滤波器,提出了一种不降低检测精度的局部与全局检测结合的优化方法,实验表明此方法提高了算法实时性;采用改进的SURF特征点检测算法替换原算法中网格均匀采样的方法,克服中值流跟踪存在的问题,提升了整体跟踪算法的鲁棒性.通过对改进算法与原算法的对比实验,验证了改进算法的准确性和实时性均优于原算法.
【总页数】3页(P97-99)
【作者】刘雪飞;蒋蓁
【作者单位】上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072
【正文语种】中文
【相关文献】
1.基于KCF相似度的TLD目标跟踪算法 [J], 张晶;熊晓雨;鲍益波
2.基于改进的TLD目标跟踪算法 [J], 胡欣;高佳丽
3.基于TLD和fDSST的长时间目标跟踪算法 [J], 李轶锟;吴庆宪;丁晟辉;胡鲲
4.基于TLD的三维单目标跟踪算法 [J], 赵斌; 王江卓; 李建勋
5.融合CN跟踪算法改进的TLD实时目标跟踪算法 [J], 张晶;黄浩淼;王健敏;保峻嵘
因版权原因,仅展示原文概要,查看原文内容请购买。
一种改进TLD的目标跟踪算法王铁东;任世卿【摘要】目标跟踪是模式识别领域传统且重要的分支.传统跟踪算法有背景差分法、帧间差分法、卡尔曼滤波等,而TLD算法从检测和跟踪两个维度,将检测与跟踪的结果同时作用于跟踪,在跟踪任务中展现出较好性能.同时TLD算法的跟踪模块采取了时间开销较大的光流法.文章针对时间开销较大的不足,提出一种改进TLD的目标跟踪算法,将光流法代替为时间开销较小的meanshift算法.实验结果表明,该方法能够有效地减少时间开销,提高运动目标跟踪效率.【期刊名称】《江苏科技信息》【年(卷),期】2018(035)001【总页数】3页(P52-53,56)【关键词】运动目标跟踪;模式识别;检测【作者】王铁东;任世卿【作者单位】沈阳理工大学信息科学与工程学院,辽宁沈阳110159;沈阳理工大学信息科学与工程学院,辽宁沈阳110159【正文语种】中文【中图分类】TP3910 引言传统目标跟踪方法将跟踪视为单一任务,常见处理方法有帧间差分法[1]、卡尔曼滤波法[2]、光流法[3]等。
TLD算法[4]从检测和跟踪两个维度出发,将检测与跟踪结果同时作用于跟踪任务,缺点是跟踪器时间开销较大。
Meanshift [5]作为经典聚类算法,利用偏移均值向量不断迭代来更新中心点位置。
但meanshift缺点是目标模板不能动态更新。
针对上述算法中出现的问题,本文提出一种基于TLD改进的目标跟踪算法。
1 TLD算法TLD算法由跟踪、学习、检测3个模块组合而成,算法将跟踪器和检测器的结果共同作用于跟踪,辅助使用学习模块进行检测器的优化和跟踪失败时的重新初始化。
整个算法的框架如图1所示。
图1 TLD算法流程1.1 跟踪器模块在跟踪器模块采用经典的光流法,利用图像像素的瞬时速度,结合上下帧关系进行跟踪。
设二维图像上某像素点n=(x,y)在时刻t的亮度为 L(x,y,t),经过时间Δt,位移Δx,Δy 后亮度为 L(x+Δx,y+Δy,t+Δt),在无穷小时间间隔Δt,无穷小位移Δx,Δy 条件下,将亮度 L(x+Δx,y+Δy,t+Δt)在时刻 t泰勒展开,有:1.2 检测器模块检测器不是单独的一个过滤器,而是由3个功能相似的过滤器组合而成。