拉曼和米散射气溶胶激光雷达数据记录格式
- 格式:docx
- 大小:36.48 KB
- 文档页数:9
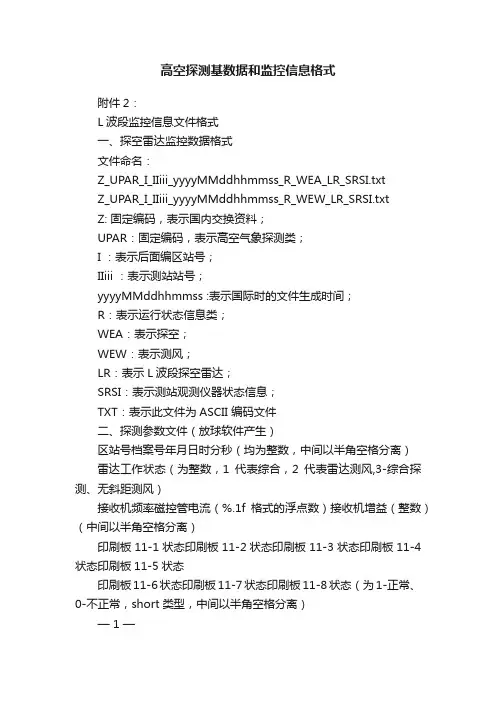
高空探测基数据和监控信息格式附件2:L波段监控信息文件格式一、探空雷达监控数据格式文件命名:Z_UPAR_I_IIiii_yyyyMMddhhmmss_R_WEA_LR_SRSI.txtZ_UPAR_I_IIiii_yyyyMMddhhmmss_R_WEW_LR_SRSI.txtZ: 固定编码,表示国内交换资料;UPAR:固定编码,表示高空气象探测类;I :表示后面编区站号;IIiii :表示测站站号;yyyyMMddhhmmss :表示国际时的文件生成时间;R:表示运行状态信息类;WEA:表示探空;WEW:表示测风;LR:表示L波段探空雷达;SRSI:表示测站观测仪器状态信息;TXT:表示此文件为ASCII 编码文件二、探测参数文件(放球软件产生)区站号档案号年月日时分秒(均为整数,中间以半角空格分离)雷达工作状态(为整数,1代表综合,2代表雷达测风,3-综合探测、无斜距测风)接收机频率磁控管电流(%.1f格式的浮点数)接收机增益(整数)(中间以半角空格分离)印刷板11-1状态印刷板11-2状态印刷板11-3状态印刷板11-4状态印刷板11-5状态印刷板11-6状态印刷板11-7状态印刷板11-8状态(为1-正常、0-不正常,short类型,中间以半角空格分离)— 1 —程序方波上程序方波下程序方波左程序方波右触发脉冲精扫触发粗扫触发仰角驱动电源+24V 方位驱动电源+24 仰角驱动模块方位驱动模块仰角上限位仰角下限位发射机过荷保护发射机反峰保护发射机过压短路(为1-正常、0-不正常,short类型)文件格式示例如下:54511 29001 2005 10 26 11 12 0911675.0 11.7 2551 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1=状态参数文件(数据处理软件产生)区站号档案号仪器号码(均为整数,中间以半角空格分离)地面瞬间气温地面瞬间气压地面瞬间湿度地面风向地面风速(均为浮点数)总云量低云量云状(编码,字符串,中间以“/”连接,缺测填写”////”)能见度天气现象(编码,中间以“/“连接,缺测填写”////”)工作方式(为整数,1代表综合,2代表雷达测风,3综合探测、无斜距测风)(均为整数,中间以半角空格分离)年月日时分秒(施放时间)时分(探空终止时间)探空终止高度时分(测风终止时间)测风终止高度(均为整数,时间格式为2005 10 26 10 01 00,高位不足,补0,中间以半角空格分离)球坐标总数(整数)时间(整数)仰角方位角(%.2f的浮点数)斜距高度(整数,中间以半角空格分离)…文件格式示例如下:59663 23018 24605515.0 1009.2 97 23 2 10 10 CUU/FCB 0.101/56 1— 2 —2005 10 26 11 12 07 15 26 22372 15 26 21504140 0.00 120.00 63 881 49.95 217.94 410 4072 58.25 236.01 794 7663 67.12 268.21 1221 12154 72.32 293.90 1489 15085 73.48 335.88 1876 18886 63.83 26.71 2342 21907 56.22 47.07 2997 25788 51.56 53.00 3679 29689 49.24 53.94 4257 331010 47.56 60.15 4867 367711 44.57 67.98 5681 407012 42.13 71.95 6500 444313 39.62 74.55 7442 4828=注:缺测数据项以“////”,表示。
简析双波长米散射激光雷达探测对流层气溶胶消光特性【摘要】双波长米散射激光雷达在对夜晚及白天对流层气溶胶消失进行系数的垂直分布探测,适用的波长为532 nm和1 064 nm。
该雷达主要组成部分包括激光发射设备、接受光学与后继光学系统、信号探测及采集设备、系统运行设备等几个主要的组成部分,主要采用高低层分层探测及光纤导光等技术进行支持。
【关键词】双波长米散射激光雷达;结构;技术参数;气溶胶;消光系数中图分类号:p42文献标识码:a文章编号:1006-0278(2012)04-121-01随着我国军事事业的飞速发展,该技术军事探测领域的应用前景十分广阔,本文主要研究双波长米散射激光雷达的组成结构、技术参数等方面内容。
一、总体结构及关键技术雷达主要由激光发射设备、接收光学及后继光学设备、信号探测与采集设备、系统运行控制设备等几个主要单元构成。
(一)激光发射设备该设备的主要功能在于对望远镜俯仰运动时,接收望远镜与激光光束沿着光轴平行的方向进入大气中。
其组成主要是五个反射镜和nd:yag激光器组成,距离较近的对大气回波信号采用几何重叠因子进行修正,通过激光雷达的大气探测获得几何重叠因子。
为保证双波长米散射激光雷达在垂直与水平两个方向进行探测时的几何重叠因子不发生变动,其发射设备也进行了特殊的设计。
、反射镜1至4、nd:yag激光器都根据图1设置,然后将其固定于光学平台,保证其之间的稳定。
在接收望远镜俯仰侧壁上安装反射镜5,其镜面中心要位于望远镜转轴上,这样就能与反射镜4反射的激光光束在俯仰转轴上重合,然后由反射镜5将激光光束沿着接收望远镜光轴平行的方向射入对流层。
整个过程全部在密封套管内完成。
(二)接收光学和后继光学设备该设备主要作用是把来自不同距离的两个波长进行收集,然后导入光电探测器进行下一步分析。
后继光学设备与望远镜支撑架都在光学平台上固定着,两者之间采用光纤进行耦合。
该结构不但保证了接受望远镜在垂直与水平方向指向时接收的大气后散射光由光纤导入后继光学设备,还保证了后继光学设备之后的整个探测单元的稳定。
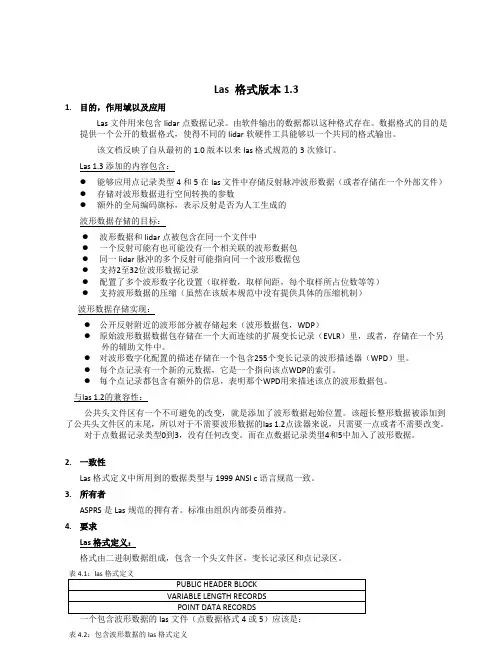
Las 格式版本1.31.目的,作用域以及应用Las文件用来包含lidar点数据记录。
由软件输出的数据都以这种格式存在。
数据格式的目的是提供一个公开的数据格式,使得不同的lidar软硬件工具能够以一个共同的格式输出。
该文档反映了自从最初的1.0版本以来las格式规范的3次修订。
Las 1.3添加的内容包含:●能够应用点记录类型4和5在las文件中存储反射脉冲波形数据(或者存储在一个外部文件)●存储对波形数据进行空间转换的参数●额外的全局编码旗标,表示反射是否为人工生成的波形数据存储的目标:●波形数据和lidar点被包含在同一个文件中●一个反射可能有也可能没有一个相关联的波形数据包●同一lidar脉冲的多个反射可能指向同一个波形数据包●支持2至32位波形数据记录●配置了多个波形数字化设置(取样数,取样间距,每个取样所占位数等等)●支持波形数据的压缩(虽然在该版本规范中没有提供具体的压缩机制)波形数据存储实现:●公开反射附近的波形部分被存储起来(波形数据包,WDP)●原始波形数据数据包存储在一个大而连续的扩展变长记录(EVLR)里,或者,存储在一个另外的辅助文件中。
●对波形数字化配置的描述存储在一个包含255个变长记录的波形描述器(WPD)里。
●每个点记录有一个新的元数据,它是一个指向该点WDP的索引。
●每个点记录都包含有额外的信息,表明那个WPD用来描述该点的波形数据包。
与las 1.2的兼容性:公共头文件区有一个不可避免的改变,就是添加了波形数据起始位置。
该超长整形数据被添加到了公共头文件区的末尾,所以对于不需要波形数据的las 1.2点读器来说,只需要一点或者不需要改变。
对于点数据记录类型0到3,没有任何改变。
而在点数据记录类型4和5中加入了波形数据。
2.一致性Las格式定义中所用到的数据类型与1999 ANSI c语言规范一致。
3.所有者ASPRS是Las规范的拥有者。
标准由组织内部委员维持。
激光雷达在湖北大气环境监测中的应用陈楠;徐宝东;张瑜;毛飞跃;祝波;田一平【摘要】介绍了激光雷达通过垂直扫描、水平扫描和车载走航等方法在湖北大气环境监测中的应用实例.利用地基激光雷达并结合星载激光雷达监测一次沙尘传输过程,沙尘传输高度为500~ 4 000 m 之间,且出现3 次尘降,地面PM10出现3次峰值.利用激光雷达探测大气边界层高度,颗粒物浓度受边界层高度影响,当边界层高度降到500 m 以下时,PM2.5浓度达到120 μg/m3,边界层高度上升到1 500 m 以上时,PM2.5浓度降到30 μg/m3 以下.利用激光雷达水平扫描技术,对襄阳市高新区污染物的影响进行溯源,监测得出颗粒物浓度上升的主要原因为地面扬尘.利用激光雷达车载走航监测技术,监测黄冈市颗粒物空间分布特征,在不同区域监测到2 处污染扩散带,分别位于工业区与生活区.%In this study,combining space-borne and ground-based lidar,a dust transmission process in Hubei was investigated by vertical scanning,horizontal scanning,and mobile platform based scanning. Dust particles mostly occured from 500 m to about 4 000 m,and were mainly contributed to high concentration of coarse particulate matter (PM10) in near surface. Moreover,the concentration of particles was distinctly affected by the height of the boundary layer. The concentration of fine particulate matter concentration (PM2.5) reached 120 μg/m3 at the boundary layer height below 500 m, while the concentration of PM2.5 dropped below 30 μg/m3 when the height of the boundary layer rises above 1 500 m. Using lidar horizontal scanning technology,the impact of pollutants in the high-tech zone of Xiangyang was traced. The results showed that the main reason for the increase of PM2.5 concentration wasdust on the ground. Furthermore,we found that industrial and living areas were the most of pollution origins in Huanggang based on mobile monitoring technology to monitor the spatial distribution characteristics of particulate matter.【期刊名称】《中国环境监测》【年(卷),期】2019(035)002【总页数】8页(P142-149)【关键词】激光雷达;大气污染;环境监测;走航监测【作者】陈楠;徐宝东;张瑜;毛飞跃;祝波;田一平【作者单位】湖北省环境监测中心站,湖北武汉 430072;北京艾沃思科技有限公司,北京 100120;武汉大学,遥感信息工程学院,湖北武汉 430079;武汉大学,遥感信息工程学院,湖北武汉 430079;湖北省环境监测中心站,湖北武汉 430072;湖北省环境监测中心站,湖北武汉 430072【正文语种】中文【中图分类】X87近年来,大气污染在湖北省发生频次越来越高,大范围的灰霾和沙尘事件,已经严重影响到人民群众的生产、生活,日益严重的颗粒物污染已对公众健康和生态安全构成了巨大威胁。
激光雷达在大气探测中的应用浅析摘要:激光雷达具有波束定向性强、探测波长短、能量密度高等特点,在大气探测中能够发挥空间分辨率高、探测灵敏度高等优点。
文章分析了激光雷达大气探测的基本原理,介绍了激光雷达的类型,探讨了激光雷达在大气探测中的具体应用,并提出一些观点以供参考。
关键词:激光雷达大气探测散射激光具有方向性、单色性、相干性、高亮度、高能量、高功能等特点。
激光雷达充分利用了激光的性能,将微弱信号探测技术、光学技术、激光技术集于一体,是一种先进的光学探测手段。
近年来,激光雷达广泛应用于陆地、海洋、大气高精度遥感探测中。
在大气探测中,激光雷达主要用于探测污染环境气体、大气成分、大气密度、大气温度等。
1 激光雷达大气探测的基本原理激光雷达的工作原理和普通雷达的工作原理相似,发射系统发出信号、接受系统收集、处理该信号和目标作用后的返回信号,从而获得工作需要的信息。
然而不同点在于,普通雷达所发射的信号是毫米波,而激光雷达所发射的信号是激光束,激光束的波长比毫米波的波长短。
普通的无线电雷达因为波长过长,所以难以探测微粒型或小型目标;而激光雷达的激光波长可以控制在微米量级,所以激光雷达能够较好地探测微粒型或小型目标。
激光雷达在大气探测中的应用的基础为大气中的气溶胶粒子、分子、原子和光辐射之间的相互作用。
主要的物理过程表现为米散射、瑞利散射、拉曼散射、荧光散射以及共振色散等。
米散射是由和激光波长相当的气溶胶粒子所引发的散射现象,其入射激光波长和散射谱的中心波长相同,入射激光谱宽和散射谱的谱宽接近。
米散射可以用于探测大气气溶胶。
瑞利散射是由小于激光波长的散射体粒子的原子或分子所引发的散射现象,其入射激光波长也和散射谱的中心波长相同,大气温度变化影响着入射激光谱宽。
瑞利散射可以用于测量大气分子密度、大气温度等参赛。
拉曼散射一般可以分为振动拉曼散射和转动拉曼散射,是由大气原子或分子所引发的一种非弹性散射,在各种散射机理中拉曼散射的散射截面最小,需要高效率的检测和分光系统,由于拉曼散射的散射机理较为特殊,可以用于大气成分、大气温度、水蒸气密度的探测。
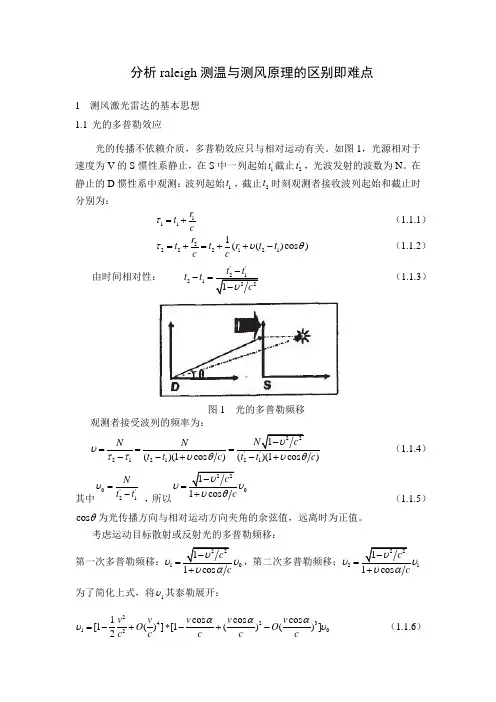
分析raleigh 测温与测风原理的区别即难点1 测风激光雷达的基本思想 1.1 光的多普勒效应光的传播不依赖介质,多普勒效应只与相对运动有关。
如图1,光源相对于速度为V 的S 惯性系静止,在S 中一列起始'1t 截止'2t ,光波发射的波数为N 。
在静止的D 惯性系中观测:波列起始1t ,截止2t 时刻观测者接收波列起始和截止时分别为:111rt c τ=+ (1.1.1)22221211(()cos )r t t r t t c cτυθ=+=++- (1.1.2)由时间相对性:''21t t -=(1.1.3)图1 光的多普勒频移观测者接受波列的频率为:2121()(1cos )N Nt t c υττυθ===--+ (1.1.4)其中0''21Nt t υ=- ,所以0υ= (1.1.5)cos θ为光传播方向与相对运动方向夹角的余弦值,远离时为正值。
考虑运动目标散射或反射光的多普勒频移:第一次多普勒频移:10υ=,第二次多普勒频移:21υ= 为了简化上式,将1υ其泰勒展开:24231021cos cos cos [1()][1()()]2v v v v v O O c c c c cαααυυ=-+*-+- (1.1.6)2100cos cos cos (1)(1)(1)[12cos cos ]22v v v v c c c c θθααθαθυυυυ+-=-=--≈- (1.1.7) 2102cos cos 22v c αθαθυυυυ+-∆=-=- (1.1.8)考虑雷达系统中,elevation αθ== c o s r υυα= 02r v c υυ∆=- 即径向速度2r v λυ=-∆ (1.1.9) 1.2 测风激光雷达工作简介多普勒测风激光雷达的工作原理如图2所示:激光束以一定方位角和天顶角指向大气的被探测区域。
在某一时刻,激光脉冲只是照明大气中一个近似圆柱体的部分(忽略了激光脉冲包络内由于光束发散引起的横截面积变化)。
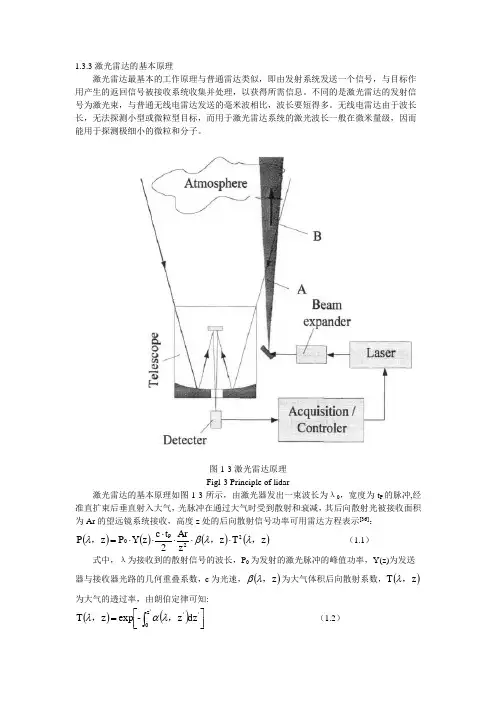
1.3.3激光雷达的基本原理激光雷达最基本的工作原理与普通雷达类似,即由发射系统发送一个信号,与目标作 用产生的返回信号被接收系统收集并处理,以获得所需信息。
不同的是激光雷达的发射信 号为激光束,与普通无线电雷达发送的毫米波相比,波长要短得多。
无线电雷达由于波长 长,无法探测小型或微粒型目标,而用于激光雷达系统的激光波长一般在微米量级,因而 能用于探测极细小的微粒和分子。
图1-3激光雷达原理 Figl-3 Principle of lidar激光雷达的基本原理如图1-3所示,由激光器发出一束波长为λ0,宽度为t P 的脉冲,经准直扩束后垂直射入大气,光脉冲在通过大气时受到散射和衰减,其后向散射光被接收面积为Ar 的望远镜系统接收,高度z 处的后向散射信号功率可用雷达方程表示[36]:()()()()z T z zAr2t c z Y P z P 22p 0,,,λλβλ⋅⋅⋅⋅⋅⋅= (1.1) 式中,λ为接收到的散射信号的波长,P 0为发射的激光脉冲的峰值功率,Y(z)为发送 器与接收器光路的几何重叠系数,c 为光速,()z ,λβ为大气体积后向散射系数,()z T ,λ 为大气的透过率,由朗伯定律可知:()()⎥⎦⎤⎢⎣⎡=⎰’’’,,z 0dz z -exp z T λαλ (1.2)式中,()z ,λα为大气的消光系数。
从理论上,()z ,λβ为大气数密度N (z)与散射截面Ωd d σ的乘积,即 ()()Ω⋅=d d z N σλβz , (1.3) 如前所述,大气中与激光雷达脉冲相互作用产生的后向散射信号成分包括了大气气体分子和气溶胶粒子,由于分子尺寸小,所产生的散射光相对较弱,瑞利散射截面与激发波长的四次方成反比,大气气溶胶粒子对激光的散射光为米散射。
对某一激光雷达的特定波长,分子散射直接随着大气分子的浓度而发生变化,但气溶胶散射却很复杂,取决于粒径分布以及气溶胶粒子的折射率。
这些气溶胶粒子随地域、时间变化明显,所以无法对其准确估算与预测。
LIDAR数据存储格式
国际上常用的LIDAR数据存储格式包括ASCII文本、栅格以及自定义的二进制格式等。
ASCII文本直接将LIDAR点的X、Y、Z坐标转换成ASCII码存储, 占用空间较大, 数据长度不固定难以建立索引。
栅格文件格式是一种成熟的地理数据存储方法,但由于LIDAR数据为离散点,如果采用栅格方式存储,需要对原始数据进行内插,造成有用信息的丢失,影响了原始数据的精度。
自定义二进制记录格式往往只是针对特定的硬件设备和数据处理软件, 难以实现数据共享。
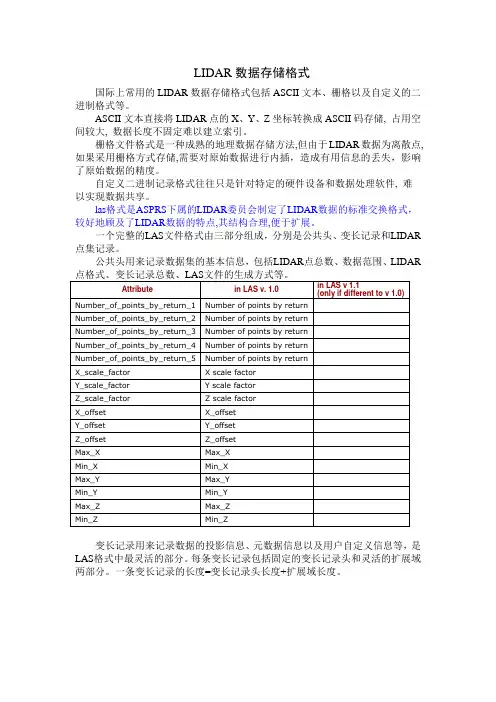
las格式是ASPRS下属的LIDAR委员会制定了LIDAR数据的标准交换格式,较好地顾及了LIDAR数据的特点,其结构合理,便于扩展。
一个完整的LAS文件格式由三部分组成,分别是公共头、变长记录和LIDAR 点集记录。
公共头用来记录数据集的基本信息,包括LIDAR点总数、数据范围、LIDAR
变长记录用来记录数据的投影信息、元数据信息以及用户自定义信息等,是LAS格式中最灵活的部分。
每条变长记录包括固定的变长记录头和灵活的扩展域两部分。
一条变长记录的长度=变长记录头长度+扩展域长度。
点集记录部分保存了大量的L IDAR脚点信息,LAS支持的LIDAR点记录格式有100种,从Format0-Format99。
在同一个LAS文件中,只有一种L IDAR点格式。
而且要与公共头中的点格式一致。
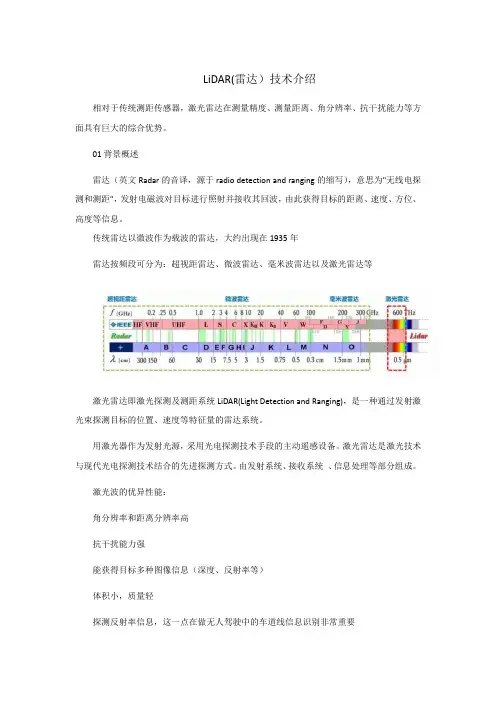
激光雷达概述1、激光雷达LiDAR(Light Detection and Ranging)的定义及其组成系统激光雷达是激光探测及测距系统的简称。
是⼀种以激光器作为发射光源,采⽤光电探测技术⼿段的主动遥感设备。
激光雷达是激光技术与现代光电探测技术结合的先进探测⽅式。
由发射系统、接收系统、信息处理等部分组成。
图1 激光雷达技术⽰意图发射系统是各种形式的激光器,如⼆氧化碳激光器、掺钕钇铝⽯榴⽯激光器、半导体激光器及波长可调谐的固体激光器以及光学扩束单元等组成。
接收系统采⽤望远镜和各种形式的光电探测器,如光电倍增管、半导体光电⼆极管、雪崩光电⼆极管、红外和可见光多元探测器件等组合。
激光雷达采⽤脉冲或连续波两种⼯作⽅式,探测⽅法按照探测的原理不同可以分为⽶散射、瑞利散射、拉曼散射、布⾥渊散射、荧光、多普勒等激光雷达。
2、激光雷达的基本原理激光雷达是⼀种集激光、全球定位系统(GPS)和惯性导航系统(INS)三种技术与⼀⾝的系统,⽤于获得数据并⽣成精确的数字⾼程模型(DEM)。
这三种技术的结合,可以⾼度准确地定位激光束打在物体上的光斑。
它⼜分为⽬前⽇臻成熟的⽤于获得地⾯数字⾼程模型的地形激光雷达系统和已经成熟应⽤的⽤于获得数字⾼程模型的⽔⽂激光雷达系统,这两种系统的共同特点都是利⽤激光进⾏探测和测量,这也正是激光雷达⼀词的英⽂原译,即:LIght Detection And Ranging - LIDAR。
激光本⾝具有⾮常精确的测距能⼒,其测距精度可达⼏个厘⽶,⽽LIDAR系统的精确度除了激光本⾝因素,还取决于激光、GPS及惯性测量单元(IMU)三者同步等内在因素。
随着商⽤GPS及IMU的发展,通过LIDAR从移动平台上(如在飞机上)获得⾼精度的数据已经成为可能并被⼴泛应⽤。
LIDAR系统包括⼀个单束窄带激光器和⼀个接收系统。
激光器产⽣并发射⼀束光脉冲,打在物体上并反射回来,最终被接收器所接收。
接被收器准确地测量光脉冲从发射到反射回的传播时间。
附录A拉曼和米散射气溶胶激光雷达数据记录格式
1.数据记录概述
数据记录文件按照原始数据(0级数据)和数据产品(1级、2级数据)分别给出,其中数据产品按照不同数据格式分别给出结构类型定义。
2.原始数据记录
原始数据记录主要保存激光雷达各个通道的观测结果和设备运行状态参数。
格式具有扩展性,可根据需要增加新的通道数据。
2.1文件名规则
原始数据文件名规则如下:
xxxx_xxxxx_xxxxx_Lidar_yyyymmddhhmmss.bin;
其中:
xxxx:每个厂家的产品具体型号;
xxxxx:设备编号,各设备对应的编号;
xxxxx: 台站编号,即设备安装台站所对应的编号;
Lidar:表示为激光雷达原始数据;
yyyymmddhhmmss: 表明是年月日时分秒,记录数据采集时间,其中小时记录为24小时制。
如20140924091027表示2014年9月24日9时10分27秒。
2.2原始数据记录文本规则
记录文本规则详见表A.1。
3.1 1级数据产品
3.1.1 文件名规则
1级数据产品包括气溶胶消光系数、气溶胶后向散射系数和气溶胶退偏振比三类产品。
主要规则如下:
(1)米通道消光系数:
xxxx_xxxxx_xxxxx_MEXT_yyyymmddhhmmss_w. bin
(2)米通道后向散射系数
xxxx_xxxxx_xxxxx_MBAKSCAT_yyyymmddhhmmss_w. bin
(3)拉曼通道消光系数
xxxx_xxxxx_xxxxx_REXT_yyyymmddhhmmss_w. bin
(4)拉曼通道后向散射系数
xxxx_xxxxx_xxxxx_RBAKSCAT_yyyymmddhhmmss_w. bin
(5)退偏振比
xxxx_xxxxx_xxxxx_DEP_yyyymmddhhmmss_w. bin
其中:
xxxx:每个厂家的产品具体型号;
xxxxx:设备编号,各设备对应的编号;
xxxxx: 台站编号,即设备安装台站所对应的编号;
MEXT表示米通道消光系数数据、MBAKSACT表示米通道后向散射系数数据、REXT表示拉曼通道消光系数数据、RBAKSACT表示拉曼通道后向散射系数数据、DEP表示退偏振比数据。
yyyymmddhhmmss分别表示采集结束的年月日时分秒。
w表示波长,采用纳米为单位,整数型,如1064.2纳米,记为1064。
3.1.2 1级数据产品记录文本规则
记录文本规则详见表A.2。
3.2 2级数据产品
3.2.1 文件名规则
2级数据产品包括光学厚度、垂直能见度、污染物混合层高度、颗粒物质量浓度、云信息(云层数、云底高度)。
主要规则如下:
(1)光学厚度
xxxx_xxxxx_xxxxx_AOD_yyyymmddhhmmss_w. doc
(2)垂直能见度
xxxx_xxxxx_xxxxx_VIS_yyyymmddhhmmss_w. doc
(3)污染物混合层高度
xxxx_xxxxx_xxxxx_MPBL_yyyymmddhhmmss. doc
(4)PM10颗粒物浓度
xxxx_xxxxx_xxxxx_PM10_yyyymmddhhmmss. doc
(5)PM2.5颗粒物浓度
xxxx_xxxxx_xxxxx_PM2_yyyymmddhhmmss. doc
(6)云信息
xxxx_xxxxx_xxxxx_CLOUD_yyyymmddhhmmss. doc
其中:
xxxx:每个厂家的产品具体型号;
xxxxx:设备编号,各设备对应的编号;
xxxxx: 台站编号,即设备安装台站所对应的编号;
AOD表示气溶胶光学厚度数据、VIS表示垂直能见度数据、MPBL表示污染物混合层高度数据、PM10表示PM10颗粒物浓度数据、PM2表示PM2.5颗粒物浓度数据、CLOUD表示云信息数据。
yyyymmddhhmmss分别表示采集结束的年月日时分秒。
w表示波长,采用纳米为单位,整数型,如1064.2纳米,记为1064。
3.2.2 2级数据产品记录文本规则
记录文本规则详见表A.3。
表A.3 激光雷达2级数据产品记录文本规则
附录B
B.1 激光雷达技术指标检测
B.2 激光雷达标准输出控制器指标情况。