纯电动汽车驱动系统工作效率优化分析
- 格式:pdf
- 大小:1.73 MB
- 文档页数:4

学习情境三纯电动汽车单元一纯电动汽车结构与工作原理一、告知学习目标了解纯电动汽车的定义及优缺点;重点理解纯电动汽车的关键参数及其计算方法;熟悉纯电动汽车的整体结构;理解纯电动汽车各部件的功能,了解其结构。
二、引入引入问题1:什么是纯电动汽车?引入问题2:纯电动汽车有何优缺点?引入问题3:纯电动汽车的续驶里程?引入问题4:纯电动汽车的整体结构?引入问题5:纯电动汽车的主要组成?三、操练分组观察纯电动汽车,讨论纯电动汽车的结构及工作过程四、深化深化讲解问题1:纯电动汽车的基础知识纯电动汽车(Blade Electric Vehicles,BEV),是一种完全由可充电电池(如铅酸电池、镍镉电池、镍氢电池或锂离子电池)提供动力源的汽车。
以车载电源为动力,通过电池向电机提供电能,驱动电动机运转,从而推动汽车前进,使之符合道路交通、安全法规各项要求的车辆。
根据纯电动汽车当前的发展情况,纯电动汽车必须符合以下几个条件:纯电动车辆研发制造运营必须符合国家各项相关法规。
整车、零部件性能必须满足国家技术标准和各项具体要求。
纯电动车辆是以电为能源,由电动机驱动行驶的,不再产生新的污染,不再产生易燃、易爆之隐患。
纯电动车辆储能用的电池必须是无污染、环保型的。
且具有耐久的寿命,具备超快充电的功能。
车辆根据用途确定一次充电之续行里程,以此装置够用电量的电池组,充分利用公用充电站超快充电以延长续行里程。
电动机组应有高效率的能量转换。
刹车、减速之能量的直接利用和回收,力求车辆之综合能源利用的高效率。
根据车辆用途和行驶场合设定最高车速,且不得超过交通法规的限定值,以合理选择电动机的功率和配置电池组容量。
车辆驾驶操作,控制简单有效、工作可靠,确保行车安全。
机械、电气装置耐用少维修。
车辆运营之费用低廉。
深化讲解问题2:纯电动汽车有哪些优缺点?纯电动汽车的电动机相当于传统汽车的发动机,蓄电池相当于传统的油箱,通常采用高效能的充电电池。
Internal Combustion Engine &Parts0引言随着社会的快速发展,我国开始实施可持续发展战略,加大了对环境和资源的保护力度,致使更多的科技工作者投入到了科技创新、节能减排的产品研发当中,在这种大背景下,新能源电动汽车研发成功并逐渐的进入到了人们的生活当中,给人们带来了便利,很大程度上解决了人们代步工具的污染问题。
在新能源动力汽车的整车中,电机是整个系统最核心的部分,控制着整个车辆的动力性能,而汽车电机控制中的驱动系统故障诊断工作是非常重要的工作内容,直接影响着新能源电动汽车的研发和生产,直观的体现了新能源汽车所运用到的最高、创新的科学技术水平。
新能源电动汽车在我国发展比较晚,研发技术还比较有限,在汽车电机驱动系统故障诊断问题上还存在一定的局限,需要更进一步的探索和研究。
1新能源电动汽车电机驱动系统和电机种类的简述依据新能源电动汽车两个或者多个能同时与转动的单个动力传动系统之间动力联合位置的不同,还可以划分为串联式、并联式和混联式三种形式。
串联式系统是指发动机和电动机处于同一条动力传输路线上,发电机发电是由发动机直接带动的,产生的电能用来驱动电动机,在传动系统的驱动下,汽车才能够正常的行驶起来。
并联式混合动力具有两套驱动系统,即内燃机和电动机,这两套驱动系统既可以独立工作,也可以相互协调,配合工作,对汽车进行共同驱动。
混联模式,是建立在并联模式之上,再安装一个发电机即可完成。
一般来讲,新能源汽车的驱动主要依靠的是驱动电机,主要包含5种类型:其一,最开始应用的是直流电机,该控制系统的优势是简便,使用比较简单;劣势是体积大、质量大、效率偏低,被广泛的应用在早期的新能源电动汽车上。
其二,随后出现的就是交流感应电机,包含有同步电机和异步电机两种。
其三,永磁无刷电机,该电机的优势是功率密度与转矩脉动较大,可以在高速区实现弱磁调节,并能够体现快速和便捷的优势,有力的提高了电机的驱动性能。
纯电动汽车制冷工况下电池直冷优化设计引言纯电动汽车作为一种环保、节能的交通工具,在全球范围内得到了广泛的关注和推广。
然而,纯电动汽车的电池系统在高温环境下容易受到损害,影响其性能和寿命。
因此,如何在制冷工况下对电池进行优化设计,提高其工作效率和稳定性成为一个重要的研究课题。
目标本文旨在探讨纯电动汽车制冷工况下电池直冷的优化设计方案,以提高电池的工作效率和稳定性。
方法为了实现上述目标,我们将采取以下步骤: 1. 研究纯电动汽车电池直冷系统的工作原理和现有设计方案; 2. 分析现有设计方案的优缺点,找出存在的问题和改进空间; 3. 提出优化设计方案,并进行仿真和实验验证; 4. 根据验证结果对优化设计方案进行优化和调整; 5. 最后,总结优化设计方案的效果和应用前景。
研究纯电动汽车电池直冷系统的工作原理和现有设计方案纯电动汽车电池直冷系统的工作原理是通过将制冷剂直接注入到电池包中,通过循环流动的方式,将电池包内部的热量带走,从而降低电池的温度。
目前,纯电动汽车电池直冷系统的设计方案主要有两种:空气直冷和液体直冷。
空气直冷是通过将外界的空气通过风扇吹入电池包进行冷却,而液体直冷则是通过循环流动的制冷剂直接接触电池包进行冷却。
分析现有设计方案的优缺点空气直冷的优点是简单、成本低,但其冷却效果相对较差,特别是在高温环境下。
液体直冷的优点是冷却效果好,能够更有效地降低电池的温度,但其成本较高,且需要额外的冷却系统。
目前,纯电动汽车电池直冷系统存在以下问题: 1. 冷却效果不佳,在高温环境下容易导致电池过热; 2. 成本较高,增加了整车的制造成本; 3. 对冷却系统的要求较高,增加了设计和维护的难度。
提出优化设计方案针对上述问题,我们提出以下优化设计方案: 1. 采用液体直冷系统,以提高冷却效果; 2. 优化制冷剂的选择和循环流动方式,以提高制冷效率; 3. 设计合理的冷却系统,以降低成本和提高可靠性; 4. 结合智能控制技术,实现对电池温度的实时监测和控制,以保证电池的工作稳定性。
虚 拟与仿 真CRU ISE 纯电动车动力性能仿真及优化姜海斌,黄宏成(上海交通大学汽车工程研究院汽车电子控制技术国家工程实验室,上海200240)Simulation and Optimization of the Electric Vehicle s Dynamic Perf ormance on CRUISEJIANG Hai bin,HUANG Hong cheng(N ational Eng ineer ing L abor ator y of Automo tiv e Elect ronics,I nstitute o f Automo tiv e Eng ineer ing,Shang hai Jiao T ong U niv ersity ,Shang hai 200240,China)摘要:以后轮驱动纯电动车为例,利用CRU ISE 软件建立了电动车的动力系统模型,并用此软件模拟得到其动力性能,验证了该模型分析车辆动力性能的可行性.分析了影响续驶里程及最大爬坡度的各种因素,提出的措施和方法能够很好地提高电动汽车动力性能.关键词:纯电动车;建模;CRUISE;续驶里程;优化中图分类号:U 469.7文献标识码:A 文章编号:10012257(2010)04006104收稿日期:20091203Abstract:T aking r earw heel dr iv e as an ex -am ple,the mo del of the electric vehicle is estab -lished in CRUISE.Also this softw are is used to simulate the perfo rmance of the vehicle.T he simu -lation results validate that CRU ISE can analyze the feasibility of vehicle per for mance.Then,various facto rs that affect continued driving range and lar -g est gr adeability ar e analyzed.The applied methods ar e all useful for the improvement of perform anceof the vehicle.Keywords:electricvehicle;m odeling;CRUISE;co ntinued driving rang e;optimization0 引言随着能源和环境对人类生活和社会发展的影响越来越大,全球石油危机和大气污染日趋严重,各种电动汽车也应运而生.纯电动汽车没有内燃机车辆工作时产生的废气,是目前最环保的车型之一[1].与传统的燃油汽车相比,由于电动车所具有的节能、环保优点,使其成为未来汽车产业发展的趋势之一.在研究和开发电动汽车的部件及选择最佳结构时,为缩短开发周期,降低开发成本,缩小研究范围,找到技术的突破口,特别是在技术方案的选择阶段,在系统和关键部件的选择上,可依靠高效的计算机对系统和关键部件进行建模,然后进行模拟仿真,从而找到最佳方案.1 纯电动汽车建模纯电动汽车的建模和动力总成系统的选择,对于整车系统的建立是非常重要的.电动汽车的运行性能主要由动力总成系统来决定.电动汽车动力总成系统的组成部分主要包括电池、电机、离合器、变速箱、减速器以及车轮.本文设计的纯电动车模型和动力总成系统如图1所示.图1 整车模型和动力系统1.1 电机模块电机是纯电动汽车惟一的驱动单元,它的技术性能直接影响到车辆的运行性和经济性.因此,必须按照电动车的技术要求合理地选择电机的参数和指标.在CRU ISE 中,电机的参数设置定义了电机的额定电压,电机在各种工作过程状态中的转矩和转速,电机效率关系以及其它一些参数[2].模型中电机的基本参数如表1所示.表1 电机的基本参数额定转速(r/m in)1430峰值转速(r/m in)5600额定转矩(N m)20峰值转矩(N m)40额定功率(kW)3峰值功率(kW)6额定电压(V)481.2 电池模块电池是制约电动汽车发展的关键因素,目前可采用的电池有铅酸电池、镍镉电池、镍氢电池、锂电池和燃料电池等.铅酸电池虽然比能量比较低,但其技术可靠,生产工艺成熟,成本低,拥有适合电动汽车使用的良好的大电流输出性能以及多种型号和尺寸.考虑到整车的成本,本车型选用了铅酸电池作为动力源.在CRU ISE中,根据电池建模的参数做出电池的SOC与电池电压之间的关系曲线,SOC 值的大小直接反映了电池所处的状态,由此可限定电池的最大放电电流,并可在仿真过程中更精确地计算各种工况下电动车的续驶里程.所选用的电池在试验室经过不同状态下的充放电试验,根据在试验中测得电池电压、电流和放电时间等参数,推断出SOC与电压的关系.2 CRU ISE中建模与仿真CRUISE软件可以用于车辆的动力性,燃油经济性以及排放性能的仿真,其模块化的建模理念使得用户可以便捷地搭建不同布置结构的车辆模型,其复杂完善的求解器可以确保计算的速度.它可用于汽车开发过程中的动力和传动系统的匹配、汽车性能预测和整车仿真计算;可以进行发动机、变速器、轮胎的选型及其与车辆的匹配优化;可以用于混合动力汽车、纯电动汽车的动力、传动及控制系统的开发和优化[3].CRUISE软件的主要特点是:a.模块化的设计思想使得用户能够便捷地进行车辆的整车模型和动力总成系统的建模,并且能够方便地进行修改和优化.b.智能化的驾驶员模块,能够很好的模拟驾驶员的意图.c.M atlab接口模块,使得用户能够使用比较复杂的控制算法.2.1 CRUISE中车辆模型按照上述结构,在CRUISE中进行建模. CRU ISE采用图形化的界面,用户可以从已有的模型箱中选择自己想要的模型.将电池、电机、离合器、变速箱、驾驶员模块以及车轮等模块拖入CRUISE 的工作区中,建立模型.输入系统中各个模块的参数,如车辆模块的满载重量、迎风面积和阻力系数等;电机的电压、转矩和转速等;车轮的摩擦系数;主减速器的主减速比等.在CRUISE仿真时,系统会提示所有必须要输入的参数,按照这个要求,把参数一一输入即可.建立系统的物理连接和信号连接.首先完成物理连接,当各子系统模型选定之后,应根据汽车配置方案和部件连接关系建立模型的物理连接.只需用connect连接功能建立物理连接.传动系各部件之间有直接的物理连接关系,车轮和制动器之间也有物理连接关系,但驾驶室与动力传动系和制动系之间没有物理连接.在仿真过程中,它们之间是通过信号连接来传递信息.信号连接是汽车建模过程中比较关键内容之一,也有较大难度.要想正确建立汽车各子模型之间的信号连接关系,必须对汽车系统内部各部件之间的连接、控制关系以及信息传递关系,有比较深刻的理解.如驾驶员模块需要连接来自电机的转速信号,变速箱的档位信号等;制动器需要连接制动压力信号;摩擦离合器需要来自驾驶员期望的结合程度[4].系统需要把所需的信号连接全部定义准确,如果有一个错误,那么将无法运行仿真程序.2.2 仿真及结果分析根据纯电动汽车仿真的要求,选择和编辑相应的任务及工况,设置合适的仿真步长和精度进行仿真计算.设定的计算任务有:在任务Cycle Run中仿真续驶里程;在任务Climbing Per for mance中仿真最大爬坡度;在任务Constant Dr iv e中仿真最高速度.运行CRUISE,得到仿真结果如下所述.a.续驶里程.建立一个25km/h匀速行驶工况,通过对电池SOC的变化对应的时间来得到纯电动车的续驶里程所需要的电量值.运行这个任务,得到纯电动车的SOC变化图.考虑到电池的输出效率为85%,得到当电动汽车以25km/h行驶100km 后,电池所消耗的电量约为130.6A h,行驶120km所消耗的电量为156.8A h.和理论所求得结果一致.b.爬坡性能.根据CRUISE软件result的报告,可以得到最大爬坡度和最高速度确切值.爬坡表现:档位,1;最大爬坡度,15.43%;车速,5.00km/ h;电机转速,602.86r/min;速度率,0.00.最大车速理论值,51.41km/h;实际值,43.71km/h.从仿真结果可以看出,根据目前车辆的参数,当电池的容量为160A h时,在25km/h的匀速运行工况下,电动汽车的续驶里程约为120km.电动汽车的最大爬坡度为16.05%,最高速度为43.71 km/h.与通过汽车理论计算得到以及车辆所要求的性能参数基本一致.这证明了利用CRU ISE软件对车辆整车性能仿真和分析是可行的.3 整车性能影响因素分析3.1 续驶里程设f为滚动阻力系数;r为轮胎滚动半径;m为汽车总质量;i g为传动系速比;C D为迎风阻力系数; t为传动系效率;A为迎风面积;Q为电池的额定容量;U E为电池的端电压; 为电机效率.则汽车以速度v等速行驶时所需的电机输出扭矩M和功率P 分别为:M=(f m+C D A v2/21.15)ri g t(1)P=(f m+C D Av2/21.15)(v/3.6)ri g t(2)电池携带的额定总能量为:W0=QU E(3)理想状态下等速行驶的续驶里程s为:s=W0vP/=QU E vP(4)从式(4)可以看出,在整车携带的电池总量和电池比能量不变的条件下,续驶里程指标与行驶阻力功率P有关[5].而行驶阻力功率又与滚动阻力系数f,迎风阻力系数C D,整车总质量m,迎风面积A,车速v,传动系效率 t,车轮半径r和传动系速比i g 有关.以电动车参数(总质量m=1100kg;f= 0 012;A=3m2;C D=0.45; t=0.9;r=0.26m)为例作分析.a.不同等速v对续驶里程的影响.在不同速度的匀速状态下运行,车辆的续驶里程是不同的[6].设置电池的电量为160A h(为确保安全,视电量剩20%时一次运行结束),不同匀速行驶状态对车辆的续驶里程的影响,如图2所示.图2 不同匀速行驶状态下车辆续驶里程的影响从图2中可以看到,各种不同的匀速行驶中,以速度接近零行驶时,车体所消耗的能量最小,对于拥有固定能量的系统来讲,其续驶里程也最长.因此,若想增加续驶里程,应尽可能以低速行驶.b.整车参数对续驶里程的影响.图3,图4和图5分别表示在匀速25km/h行驶下,迎风阻力系数C D,滚动阻力系数f和整车总质量m对一次充图3 迎风阻力系数对续驶里程的影响图4轮胎滚动阻力系数对续驶里程的影响图5 整车总质量对续驶里程的影响电续驶里程的影响.可见携带能源极为有限的电动汽车对降低滚动阻力系数、迎风阻力系数和整车总质量的要求非常迫切.c.电池参数对续驶里程的影响.由式(4)可知,电动汽车携带的电池总量以及电池的端电压的大小都会影响续驶里程,并且它们与续驶里程成正比.可见提高电池的最大容量及电池端电压,对提高电动汽车续驶里程意义重大.另外,电池放电效率同样对续驶里程有着重要的影响,电池放电效率越高,续驶里程的数值也越大.d.电机对续驶里程的影响.电机参数中电机的效率 对续驶里程的影响最大.效率越高,续驶里程的数值越大.同时在各种工况下的效率对续驶里程的影响更大.因此对电动车用电机而言,不仅要求电机在额定状态下具有较高的效率,而且要求电机具有很宽的高效率区域,这样才能在各种行驶工况下充分利用有限的能量.对此,提出了增加一次充电续驶里程的措施:尽可能选择较低的行驶速度;降低轮胎的滚动阻力系数,选用低阻力轮胎;降低迎风阻力系数,进行车身的流线型改进;减轻汽车总质量;扩大电机的高效区范围及提高电机效率.3.2 最大爬坡度汽车的最大爬坡度,是指汽车满载时在良好路面上用第一档克服的最大坡度,它表征汽车的爬坡能力.爬坡度用坡度的角度值(以度数表示)的百分数来表示.设T tq为电机最大转矩;i g为变速器加速档传动比;i0为主减速器传动比; t为传动系的机械效率;r 为轮胎半径.则对于电动汽车来说,车辆的最大驱动力为[7]:F t=T tq i g i0 tr(5)而车辆的滚动阻力F f=mf cos ,坡度阻力为F i=m sin ,加速阻力.同时由于在计算最大爬坡度时车速很小,故可忽略空气阻力F W.由驱动力行驶阻力平衡公式F t= F=F f+F W+F i+F j,得到最大爬坡度 max的计算公式为:T tq i g i0 tr=mf cos max+m sin max(6)由式(6)可以看出,最大爬坡度与电机最大转矩T tq、轮胎半径r、整车总质量m和滚动摩擦系数f 等参数有关.a.电机参数对最大爬坡度的影响.在电机参数中,电机最大转矩的大小与车辆最大爬坡度的大小有着直接的联系[8].电机的最大转矩越大,最大爬坡度也越大.因此,从电机方面来说,若想提高车辆的爬坡性能,可以通过提高电机的最大转矩来实现.b.车辆参数对最大爬坡度的影响.图6,图7分别表示轮胎滚动阻力系数f和整车总质量m对车辆最大爬坡度的影响.从图6,图7中可见,轮胎滚动阻力系数和整车总重量都对最大爬坡度有很大的影响[9].要想获得合适的最大爬坡度,就必须合理地设置这2个参数.图6轮胎滚动阻力系数对最大爬坡度的影响图7 整车总质量对最大爬坡度的影响对此,提出了增加爬坡性能的措施:选择拥有较高最大转矩的电机;降低轮胎的滚动阻力系数,选用低阻力轮胎;减轻汽车总重量.4 结束语运用CRUISE软件对纯电动车进行建模和动力性能的仿真,得到了续驶里程、最大速度及最大爬坡度等指标,仿真结果验证了CRU ISE仿真动力性能的可行性.通过本文的仿真和分析,为电动汽车的参数选择以及结构优化提供了依据.参考文献:[1] 康龙云.电动汽车最新技术[M].北京:机械工程出版社,2008.[2] 王 斌,李 征,等.CR U ISE 软件在混合动力汽车性能仿真中的应用[J].计算机应用,2007,9(3):1-3.[3] 赵海峰.基于CR U ISE 软件的AM T 车辆性能仿真分析与实验研究[D].重庆:重庆大学,2005.[4] 王保华,罗永革.基于CRU ISE 的汽车建模与仿真[J].湖北汽车工业学院学报,2005,19(2):2-3.[5] 李国良,初 亮,鲁和安.电动汽车续驶里程的影响因素[J].吉林工业大学自然科学学报,2000,30(3):1-3.[6] 杜发荣,吴志新.电动汽车传动系统设计与续驶里程研究[J].农业机械学报,2006,37(11):3-4.[7] 余志生.汽车理论.3版[M ].北京:机械工程出版社,2000.[8] Cheng Chang T ing.H y br id electric vehicle design tominimize ener gy use [C].T he U niv ersity of T ex as at A rling ton,2000.[9] Sha Y L.T he pow er desig n and calculation o f EV S[A].T he 16t h Inter nat ional Batter y,H ybrid and F uel Cell Elect ric Vehicle Symposium &Ex hibitio n [C ].Beijing ,1999.作者简介:姜海斌 (1985-),男,江苏张家港人,硕士研究生,研究方向为汽车动力系统仿真以及汽车系统控制等;黄宏成 (1972-),男,江苏苏州人,副教授,研究方向为汽车系统控制以及底盘开发.ARM 7参数自整定模糊PID 控制器的仿真及设计王朝宁1,姜学东1,马立刚2(1.北京交通大学电气工程学院,北京100044;2.山西省电力公司吕梁供电分公司,山西吕梁033000)Design and Simulation of Self tuning PID type Fuzzy Controller Based on A RM 7ProcessorWANG C hao ning 1,JIANG Xuedong 1,MA Li gang 2(1.Schoo l o f Electrica l Eng ineering ,Beijing Jiaoto ng U niver sity,Beijing 100044;2.Shanx i L vliang P ower Supply Co mpany ,L v liang 033000,China)摘要:常规PID 控制器参数设定之后,运行环境改变时不能实现参数的在线整定,这样会影响系统的控制效果.本设计以误差e 和误差变化率ec 作为输入,经过一定的模糊推理规则,对PID 控制器的参数进行自动整定.在M atlab 环境下对系统进行了仿真,从仿真的结果可以看出,添加模糊控制环节后,系统的动静态性能得到了提高.同时基于ARM 7处理器完成了该控制器的软硬件设计.关键词:参数自整定模糊控制PID;M atlab;ARM 7处理器中图分类号:T P273文献标识码:A 文章编号:10012257(2010)04006505收稿日期:20091203Abstract:When operating environmentchang ed,the traditio nal PID contro ller can t online regulate its parameters,w hich are co nfigured w ellat the beginning.And that w ould affect contro l per for mance o f system.Taking erro r and decay r ate of err or as inputs in the desig n,arg um ents o f PID contro ller can reach self tuning function,as to some accurate fuzzy sets.From the result of simu -latio n done w ith M atlab,dy namic and static per -formances of system added fuzzy controller are im -proved.T he autho r also com pleted the hardw are and so ftw are desig n of the contro ller based on ARM7processor.Key words:self tuning PID type fuzzy con -troller;M atlab;ARM7processor0 引言模拟PID 闭环控制在常规的电源控制技术中应用很普遍,效果比较理想并且稳定,但其缺点是一。
纯电动汽车的基本机构及优缺点分析摘要: 汽车保有量的持续增加促使石油资源的消耗量逐日增多,传统汽车在消耗大量自然资源的同时,还造成了严重的环境污染,环境污染程度已经远超过大自然的自我净化能力,致使空气质量指数持续下降危及人们的身屯、健康。
大力发展环保清洁的新能源汽车是目前缓解石油紧缺、解决环境污染问题的有效措施。
各国纷纷倡导绿色出行,环保、高效、零排放的纯电动汽车始终是我国新能源汽车发展的布局中心。
纯电动汽车与传统内燃机汽车动力源存在明显差异,内部结构极大简化,大幅提升了电动汽车内部布局的灵活性和造型的自由度,然而现有纯电动汽车尚未形成独有的设计特征。
文章对新能源纯电动车的相关技术要点进行分析。
关键词:新能源汽车;双电机;电动汽车;驱动系统1新能源纯电动车定义与原理纯电动汽车顾名思义,是利用单一蓄电池作为储能动力源,通过电动机、电力驱动及控制系统、传动系统等来驱动行驶并符合道路交通、安全法规各项要求的车辆。
传统汽车的驱动模式是内燃机对在油箱中储存的化石燃料做功产生动力,通过离合器、变速箱等传动系统到达车轮驱驶汽车运动;纯电动汽车则是集成式驱动模式,直接利用电池储存的电能,通过控制系统来驱动电动机产生动力,再通过传动系统驱动车轮行驶。
2新能源纯电动车优缺点2.1优点新能源汽车与传统的汽车相比较而言,其能耗更低,新能源纯电动汽车消耗的能源主要是电能,传统汽车消耗的是汽油、柴油,相比之下,新能源纯电动车具有更多优点,具体如下。
(1)零排放。
电动汽车以电能为动力源,不是油类,所以在行驶的时候不会排放出二氧化碳等污染物。
(2)能源利用率高。
电动汽车动力源的来源有很多,比如风力发电、水力发电、太阳能发电等,这些都可以产生电能,而且科技快速发展,还会不断拓展纯电动汽车能源的范围,使得纯电动汽车的能源更多样化。
另外,有研究显示,传统汽车所消耗的原油,必须要经过提炼之后才可以用于汽车,原油经过提炼之后送到加油站,燃油在燃烧过程中的能量效率大约为13%,但是纯电动汽车所消耗的电能,只需要经过电力传输驱使汽车行驶,其能量效率大约为18%左右,由此可见,纯电动汽车的能源利用率更高。
新能源电动汽车两档变速器的设计与实现一、纯电动汽车两挡自动变速器传动比优化及换挡品质研究摘要:汽车传动系统中,变速器作为关键构件,直接影响整车性能。
为了使电动汽车驱动电机的效率得到提升,对固定速比电动汽车进行改动,采用两挡传动比方案,促使驱动电机工作效率提高,进而使整车动力性能及经济性能得到提升。
主要对纯电动汽车两挡自动变速器传动比优化及换挡品质进行研究。
1、整车基本参数基于传统微型车对电动汽车进行研究,保留原车悬挂系统,动力电池采用锰酸锂电池,驱动电机采用永磁同步电机。
综合研究后,整车参数为:满载质量1 350 m/kg,机械传动效率0.9,轮胎滚动半径0.258 r/min,迎风面积1.868人/川2,空气阻力系数0.31.根据国标GB/T 28382—2012标准及市场定位,整车动力性指标如下:30 min最高车速〉80 km/儿最大爬坡速度>20%, 4%坡度的爬坡车速〉60 km/h,12%坡度的爬坡车速〉30 km/儿工况法行驶里程〉100 km。
2、驱动电机参数确定对电机进行选择时,要确保电机最大限度地工作在高效区,同时也要考虑电池组的峰值放电倍率。
2.1驱动电机功率在最高车速时计算以最高车速在水平道路上行驶,对加速阻力忽略不计,设风速为0,那么电机的输出功率即为尸二1 (第g/OOx I Q加;J 1 一名13 600 76 140 )IP1为最高车速时驱动功率;nt为机械传动效率;mg为整车满载质量;f(U)为滚动阻力系数;umax为最大车速;Cd为空气阻力系数;A为迎风面积。
其中:f (u) =1.2 (0.009 8+0.002 5[u/ (100 km/h) ]+ 0.000 4[u/ (100 km/h) ]4).按照实际需求及国际标准,选择100 km/h车速,根据式(2), 计算结果为0.015 24,代入式(1),计算结果为P1=13.2kW。
如果车速符合国家标准规定的不低于85碗勺,那么电机的功率还可以选择更小的。
纯电动汽车制动器设计与性能优化纯电动汽车作为未来汽车发展的趋势之一,其制动系统的设计和性能优化尤为重要。
制动器作为汽车安全性的关键部件之一,负责将车辆减速或停车,对其设计和优化要求较高。
一、纯电动汽车制动器的设计原理纯电动汽车制动器的设计原理与传统汽车制动器类似,主要通过摩擦和压力来实现对车辆的减速和停车。
常见的制动器包括盘式制动器和鼓式制动器。
盘式制动器由制动盘、制动夹钳、制动片和制动液组成。
当司机踩下制动踏板时,制动液被推送到制动夹钳,夹住制动盘,产生摩擦力,使车辆减速。
这种制动器具有散热性能好、制动效果稳定等特点。
鼓式制动器由制动鼓、制动鞋、制动缸和制动液组成。
当司机踩下制动踏板时,制动液被推送到制动缸,使制动鞋被推压到制动鼓上,产生摩擦力,使车辆减速。
这种制动器具有质量轻、结构简单等特点。
二、纯电动汽车制动器性能优化1. 制动系统的响应速度:纯电动汽车由于具有高扭矩和高能量回收特性,对制动器的响应速度要求较高。
优化制动系统的液压传输系统,减少液压延迟和制动片与制动盘之间的接触时间,可以提高制动系统的响应速度。
2. 制动系统的稳定性:纯电动汽车的制动系统对稳定性要求较高,尤其是在高速行驶和紧急制动情况下。
通过优化制动盘和制动片的材料选择和配比,可以提高制动系统的稳定性,减少制动盘的磨损和制动褪色现象。
3. 制动效率的提高:纯电动汽车由于具有高能量回收特性,优化制动系统的能量回收系统,可以将制动时的能量回收到电池中,减少对传统制动器的依赖,提高制动效率。
4. 制动器的散热性能:纯电动汽车的制动器由于电动机制动和摩擦制动共同工作,容易产生大量的热量。
优化制动器的散热系统,增加制动器的冷却效果,可以降低制动器的工作温度,提高制动效果和使用寿命。
5. 制动器的自适应控制:纯电动汽车的制动器需要具备自适应控制功能,能够根据不同的行驶状态和路况条件来调整制动力的大小。
通过引入传感器和控制系统,实现制动力的自动调节,可以提高制动器的性能和安全性。
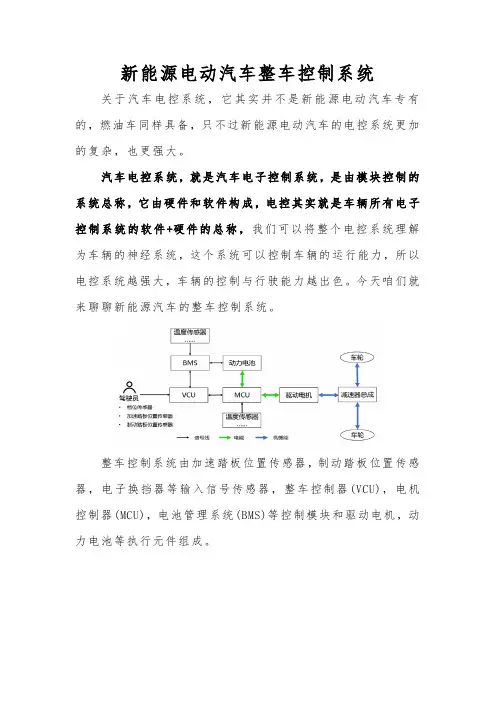
新能源电动汽车整车控制系统关于汽车电控系统,它其实并不是新能源电动汽车专有的,燃油车同样具备,只不过新能源电动汽车的电控系统更加的复杂,也更强大。
汽车电控系统,就是汽车电子控制系统,是由模块控制的系统总称,它由硬件和软件构成,电控其实就是车辆所有电子控制系统的软件+硬件的总称,我们可以将整个电控系统理解为车辆的神经系统,这个系统可以控制车辆的运行能力,所以电控系统越强大,车辆的控制与行驶能力越出色。
今天咱们就来聊聊新能源汽车的整车控制系统。
整车控制系统由加速踏板位置传感器,制动踏板位置传感器,电子换挡器等输入信号传感器,整车控制器(VCU),电机控制器(MCU),电池管理系统(BMS)等控制模块和驱动电机,动力电池等执行元件组成。
组成构架图汽车上的这些控制器通过CAN网络来通信。
CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。
最初,CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。
比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。
1.驾驶员驾驶意图解析主要是对驾驶员操作信息及控制命令进行分析处理,也就是将驾驶员的油门信号和制动信号根据某种规则,转化成电机的需求转矩命令。
因而驱动电机对驾驶员操作的响应性能完全取决于整车控制的油门解释结果,直接影响驾驶员的控制效果和操作感觉。
2.整车驱动控制根据驾驶员对车辆的操纵输入(加速踏板、制动踏板以及选档开关)、车辆状态、道路及环境状况,经分析和处理,向整车管理系统发出相应的指令,控制电机的驱动转矩来驱动车辆,以满足驾驶员对车辆驱动的动力性要求;同时根据车辆状态,向整车管理系统发出相应指令,保证安全性、舒适性。
3.制动能量回馈控制整车控制器根据加速踏板和制动踏板的开度、车辆行驶状态信息以及动力电池的状态信息(如SOC值)来判断某一时刻能否进行制动能量回馈,在满足安全性能、制动性能以及驾驶员舒适性的前提下,回收部分能量。
《新能源汽车电机与控制技术》论文一、引言随着能源危机和环境污染的日益严重,新能源汽车作为一种节能、减排、低碳的交通工具,受到了国内外的广泛关注和重视。
新能源汽车,是指采用新型动力系统,完全或者主要依靠新型能源驱动的汽车,包括纯电动汽车、插电式混合动力汽车、增程式混合动力汽车和燃料电池汽车等12。
新能源汽车的发展不仅有利于保障能源安全,提高能源利用效率,改善环境质量,还有助于推动汽车产业的转型升级,增强国际竞争力。
新能源汽车的核心技术之一是驱动电机与控制技术,它决定了新能源汽车的动力性能、经济性能和安全性能。
驱动电机是新能源汽车的动力源,它将电能转化为机械能,驱动车轮运转。
控制技术是驱动电机的“大脑”,它根据车辆的工况和驾驶员的意图,对驱动电机进行精确的控制,实现最优的运行状态。
驱动电机与控制技术的优劣,直接影响了新能源汽车的性能、效率和寿命。
本文旨在对新能源汽车驱动电机与控制技术进行系统的分析和研究,主要内容和研究目的如下:(1)介绍新能源汽车驱动电机的类型和特点,分析各种类型的驱动电机的优缺点和适用范围,探讨新能源汽车驱动电机的发展趋势。
(2)介绍新能源汽车驱动电机控制器的基本原理和功能,介绍新能源汽车驱动电机的控制策略和方法,探讨新能源汽车驱动电机的控制技术的发展趋势。
(3)介绍国内外新能源汽车驱动电机与控制技术的典型应用案例,分析各种应用案例的技术特点和优势,探讨新能源汽车驱动电机与控制技术的应用前景和挑战。
本文的研究目的是为了深入了解新能源汽车驱动电机与控制技术的现状和发展,为新能源汽车的设计和优化提供参考和指导,为新能源汽车的推广和普及贡献力量。
二、新能源汽车驱动电机的类型和特点新能源汽车驱动电机是指将电能转化为机械能的装置,是新能源汽车的核心部件之一。
根据电机的工作原理和结构特点,新能源汽车驱动电机可以分为以下几种类型:直流电机:直流电机是指电枢和磁场之间的电流方向不随转子转动而改变的电机,主要有直流有刷电机和直流无刷电机两种。
第1篇一、实验目的随着全球能源危机和环境污染问题的日益严重,新能源汽车作为一种清洁、环保、可持续的交通工具,得到了越来越多的关注。
本实验旨在通过对新能源汽车进行性能测试,验证其动力性能、续航里程、充电效率等方面的指标,为新能源汽车的研发、生产和推广应用提供依据。
二、实验内容1. 实验对象实验对象为某品牌纯电动汽车,车辆参数如下:型号:XX纯电动轿车电池容量:60kWh电动机功率:120kW最高车速:150km/h续航里程:300km2. 实验项目(1)动力性能测试动力性能测试包括0-100km/h加速时间、最高车速、爬坡能力等指标。
(2)续航里程测试续航里程测试是在标准工况下,车辆从满电状态行驶至电量耗尽所需的里程。
(3)充电效率测试充电效率测试包括充电时间、充电功率、充电能耗等指标。
(4)能耗测试能耗测试包括百公里能耗、综合能耗等指标。
三、实验方法1. 动力性能测试采用专业的动力性能测试仪器,对车辆进行0-100km/h加速时间、最高车速、爬坡能力等指标的测试。
2. 续航里程测试在标准工况下,车辆满电后开始行驶,直至电量耗尽,记录行驶里程。
3. 充电效率测试使用专业的充电测试设备,对车辆进行充电时间、充电功率、充电能耗等指标的测试。
4. 能耗测试使用专业的能耗测试设备,对车辆进行百公里能耗、综合能耗等指标的测试。
四、实验结果与分析1. 动力性能测试结果0-100km/h加速时间:9.5秒最高车速:150km/h爬坡能力:30%2. 续航里程测试结果续航里程:295km3. 充电效率测试结果充电时间:2小时充电功率:30kW充电能耗:36kWh4. 能耗测试结果百公里能耗:16.3kWh综合能耗:15.8kWh五、实验结论1. 动力性能方面,实验车辆0-100km/h加速时间、最高车速、爬坡能力等指标均达到预期目标。
2. 续航里程方面,实验车辆在标准工况下的续航里程为295km,与标称续航里程300km基本一致。
第一章绪论1.1课题的目的意义:1.1.1 纯电动汽车的背景当前,我国电动汽车发展已经进入关键时期,既面临重大的发展机遇,也面临着严峻的挑战。
我国电动汽车发展中还存在很多需要解决的问题,如核心技术还不具备竞争力,企业投入不足,政府的统筹协调能力还没有充分发挥等。
总体上看来,我国电动汽车产业,起步不晚,发展不慢,但是由于传统汽车及相关产业基础相对薄弱、投入不足,差距仍然存在,中高端技术竞争压力越来越大,因此,必须加大攻坚力度,推动我国汽车产业向创新驱动转型,提高核心技术竞争力,确保我国汽车行业的可持续发展。
纯电动汽车使用电动机作为传动系统的动力源,缓解了能源紧缺的压力,实现了人们长期以来对汽车零尾气排放的期盼,传动系统作为汽车的核心组成部分,其技术创新是纯电动汽车发展的必经之路。
1.1.2纯电动汽车的意义近年来,关于纯电动汽车的研究主要集中在能量存储系统、电驱动系统和控制策略的开发研究三方面。
能量存储系统相当于纯电动汽车的发动机,是纯电动汽车电动机所需电能的提供者。
目前,铅酸蓄电池是使用最为广泛的,但其充电速度较慢,使用寿命短,节能环保差。
随着电动汽车技术的发展,其他电池正在渐渐取代着铅酸蓄电池。
目前发展的新电源有纳硫电池、锂电池、镍镉电池、飞轮电池、燃料电池等,尽管这些新电源投入应用,但是短时间内还是无法解决纯电动汽车电源充电缓慢,电量存储低续航里程短的问题。
纯电动汽车整车控制策略的开发研究一直在紧锣密鼓的进行着,整车控制系统是纯电动汽车实现整车控制和管理的关键,是实现和提高整车控制功能和性能水平的一个重要技术保证。
其核心技术主要体现在整车控制软件的架构设计、转矩控制策略以及对整车和各系统得能量管理上。
尽管控制策略的开发研究一直没有间断,但是,系统开发较为复杂,进度较慢。
1.2近年来国内外研究现状:1.2.1国内发展现状:我国正式对电动汽车的研制始于1981年,当时全球对电动汽车的宣传和需求并不强烈,对电动汽车的研究也相当零散,投入很少。
面向能耗的纯电动汽车双电机动力系统控制策略电动汽车的能耗与动力系统控制策略密切相关。
双电机动力系统是一种常见的电动汽车动力系统,它由两个电机分别驱动前后轮,通过合理的控制策略可以实现有效的能量利用和优化的动力性能。
1. 能耗预测和能量管理:通过对车辆进行能耗预测,可以合理安排电机的工作模式和能量供应,以最小化能量消耗。
能量管理系统可以根据车辆驾驶模式和路况条件,动态调整电机的工作状态,最大限度地提高能源利用率。
2. 轮速控制和力矩分配:双电机动力系统可以实现前后轮的独立控制,通过合理的力矩分配策略可以优化车辆的动力性能和能耗。
在低速行驶时,可以通过电机的协同工作,提供更大的起步扭矩和牵引力;在高速行驶时,可以通过将电机工作在最高效率点上,最大限度地提高能量转化效率。
3. 制动能量回收和能量回馈:纯电动汽车的制动过程中,电机可以扮演发电机的角色,将制动能量回收并存储到电池中。
控制系统应该通过合理调整制动力矩与电机的工作状态,最大限度地回收制动能量。
当电池电量较高时,可以通过能量回馈系统将多余的能量回馈给电池,延长续航里程。
4. 故障监测和故障处理:面向能耗的控制策略应该考虑到电机系统的故障监测和处理。
通过检测和诊断电机系统的故障,及时采取措施修复或改变工作策略,保证动力系统的稳定运行并减少能耗。
面向能耗的纯电动汽车双电机动力系统控制策略应该通过能耗预测和能量管理、轮速控制和力矩分配、制动能量回收和能量回馈以及故障监测和故障处理等手段,实现对动力系统的有效控制和优化,从而提高能源利用率,延长电池寿命和续航里程,提升车辆的整体性能和用户体验。