神经网络多任务之图像识别与实例分割
- 格式:pptx
- 大小:50.54 MB
- 文档页数:50
分割模型总结分割模型是计算机视觉领域中一类重要的深度学习模型,它的主要目标是将输入的图像或视频分割成若干个像素级别的区域,每个区域都属于特定的类别。
本文将从分割模型的背景介绍、常用的分割模型架构、分割模型的训练与评估方法等方面进行总结。
一、背景介绍图像分割是计算机视觉领域中的一个重要任务,它在很多应用中起到了关键作用。
传统的图像分割方法通常基于像素级别的特征,而深度学习的兴起使得基于深度神经网络的图像分割方法得到了极大的发展。
分割模型可以将图像中的每个像素都分配到特定的类别中,能够提供更加准确的分割结果。
二、常用的分割模型架构1. FCN(Fully Convolutional Network):FCN是第一个将全连接层替换为卷积层的分割模型架构,通过逐像素的预测实现了端到端的像素级别分割。
2. U-Net:U-Net是一种常用于生物医学图像分割的架构,它具有U形的结构,通过将浅层特征与深层特征进行连接来提高分割的准确性。
3. DeepLab:DeepLab是一种基于空洞卷积的分割模型架构,通过引入空洞卷积来增大感受野,提高了模型对图像细节的分割能力。
4. Mask R-CNN:Mask R-CNN是一种将目标检测和图像分割结合起来的模型,它在目标检测的基础上增加了分割分支,能够同时实现目标检测和实例分割。
三、分割模型的训练与评估方法1. 数据集准备:分割模型的训练需要标注好的像素级别标签,通常需要大量的标注数据。
常用的分割数据集有Cityscapes、PASCAL VOC等。
2. 模型训练:分割模型的训练通常采用端到端的方式,即将图像作为输入,通过前向传播计算预测结果,再与标签进行比较计算损失,并通过反向传播更新模型参数。
3. 模型评估:分割模型的评估主要通过计算预测结果与真实标签之间的像素级别的差异,常用的评价指标有IoU(Intersection over Union)、Dice系数等。
四、分割模型的应用领域分割模型在计算机视觉领域有广泛的应用,例如语义分割、实例分割、场景解析等。
Yolov7实例分割推理ONNX Python一、Yolov7简介Yolov7是一种用于目标检测和实例分割的深度学习模型,它是Yolov 系列模型的最新版本。
与Yolov6相比,Yolov7在模型结构和性能上有了显著的提升。
Yolov7模型由深度卷积神经网络组成,能够在图像中快速准确地检测和分割出各种目标,包括人、车等。
二、Yolov7实例分割推理Yolov7模型的实例分割推理是指利用训练好的Yolov7模型,对输入的图像进行目标检测和分割。
这个过程需要使用ONNX格式的模型,并结合Python编程语言进行推理。
ONNX是一种开放式的深度学习模型表示和转换格式,它可以在不同的深度学习框架之间进行模型转换和部署。
Python是一种流行的编程语言,广泛应用于深度学习和机器学习领域。
三、ONNX格式ONNX格式是一种标准的深度学习模型表示格式,它可以将深度学习模型表示为计算图的形式,并包含模型的权重和参数。
ONNX格式的模型可以在不同的深度学习框架中进行导入和导出,实现模型的跨框架部署。
Yolov7模型可以通过ONNX格式进行导出,然后在Python 中进行导入和使用。
四、Python编程Python是一种简单易学的编程语言,具有丰富的第三方库和工具,适合于深度学习模型的部署和使用。
在实例分割推理中,可以使用Python编写脚本,加载ONNX格式的Yolov7模型,并对输入的图像进行推理。
Python编程语言的灵活性和便捷性为Yolov7实例分割推理提供了良好的支持。
五、Yolov7实例分割推理流程对于Yolov7实例分割推理,主要包括以下几个步骤:1、准备Yolov7模型:首先需要下载训练好的Yolov7模型,并将其转换为ONNX格式。
2、加载模型:使用Python编程语言,利用相应的库和工具加载ONNX格式的Yolov7模型。
3、输入图像:准备要进行实例分割的输入图像。
4、推理过程:将输入图像输入到Yolov7模型中,进行目标检测和实例分割,得到目标的位置和分割结果。
实例分割综述论⽂:A Survey on Instance Segmentation: State of the art论⽂地址:⽬标检测( Object detection)不仅需要提供图像中物体的类别,还需要提供物体的位置(bounding box)。
语义分割( Semantic segmentation)需要预测出输⼊图像的每⼀个像素点属于哪⼀类的标签。
实例分割( instance segmentation)在语义分割的基础上,还需要区分出同⼀类不同的个体。
本⽂主要介绍实例分割的背景( background),问题( issues),技巧⽅法( techniques),进展( evolution),热门的数据集(popular datasets),最先进的相关⼯作( related work up to the state of the art)和未来的发展⽅向( future scope)。
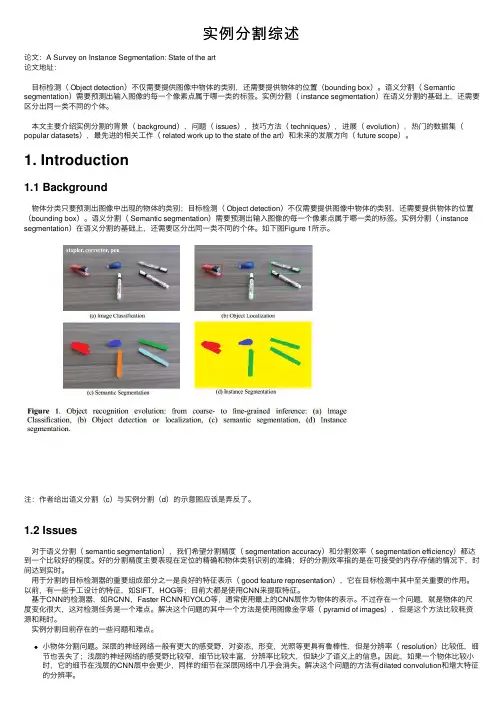
1. Introduction1.1 Background物体分类只要预测出图像中出现的物体的类别;⽬标检测( Object detection)不仅需要提供图像中物体的类别,还需要提供物体的位置(bounding box)。
语义分割( Semantic segmentation)需要预测出输⼊图像的每⼀个像素点属于哪⼀类的标签。
实例分割( instance segmentation)在语义分割的基础上,还需要区分出同⼀类不同的个体。
如下图Figure 1所⽰。
注:作者给出语义分割(c)与实例分割(d)的⽰意图应该是弄反了。
1.2 Issues对于语义分割( semantic segmentation),我们希望分割精度( segmentation accuracy)和分割效率( segmentation efficiency)都达到⼀个⽐较好的程度。
好的分割精度主要表现在定位的精确和物体类别识别的准确;好的分割效率指的是在可接受的内存/存储的情况下,时间达到实时。
基于unet的实例分割
实例分割是计算机视觉领域的一项重要任务,它的目标是将图像中的每个像素分配给相应的对象实例。
近年来,基于深度学习的实例分割方法取得了显著的进展,其中,基于Unet 的实例分割方法备受关注。
Unet是一种经典的卷积神经网络结构,它具有编码器和解码器两部分,能够有效地处理图像语义分割问题。
在实例分割中,Unet的编码器部分负责提取图像中的特征,解码器部分则将特征映射回像素级别的实例分割结果。
基于Unet的实例分割方法通常采用分割头(segmentation head)来预测每个像素属于哪个实例。
分割头通常由一些卷积层和上采样层组成,能够将编码器部分提取的特征映射到像素级别的实例分割结果。
基于Unet的实例分割方法具有结构简单、精度高等优点,已经在许多实际应用中得到了广泛的应用和验证。
基于深度学习的图像处理技术随着深度学习技术的不断发展和进步,它已经成为图像处理领域中最重要的技术之一。
深度学习的核心思想是从大量数据中学习到特征,并利用这些特征进行分类、回归、识别等任务。
在图像处理中,深度学习技术可以用于图像分类、目标检测、图像分割、图像合成、图像增强等多个方面。
一、图像分类图像分类是指将一张图像确定到一个特定的类别中。
常见的图像分类任务包括人脸识别、物体分类、行人检测等。
深度学习常用于图像分类任务。
最常用的深度学习模型是卷积神经网络(CNN),是一种能够学习到图像特征的神经网络,可以通过多个卷积层、池化层和全连接层来进行图像分类。
在图像分类任务中,需要使用大规模的标记数据来训练CNN模型,并对其进行细节调整以获得更好的性能。
二、目标检测目标检测是一种将图像中的目标对象位置和类别都确定下来的任务。
常见的目标检测应用包括交通标志检测、人脸牌照检测、物体检测等。
深度学习在目标检测任务中也有广泛应用。
现在最有效的目标检测方法是基于卷积神经网络的目标检测方法,如R-CNN、Fast R-CNN、Faster R-CNN、YOLO等,深度学习模型可以通过卷积层和全连接层来识别目标区域,并对这些区域进行分类。
图像分割有两个主要的任务:语义分割和实例分割。
语义分割是将图像中的像素划分为不同的语义类别,而实例分割是将图像中不同的物体实例划分为不同的类别。
深度学习模型在语义分割和实例分割任务中也有广泛应用,例如UNet、Mask R-CNN等。
这些模型可以通过卷积层和池化层来提取特征,并生成分割掩码。
四、图像合成图像合成是通过组合不同的图像来生成新的图像。
深度学习可以用于图像合成任务,例如图像翻译、图片生成、图像修复等。
生成对抗网络(GAN)是一类用于生成合成图像的深度学习模型,由一个生成器和一个判别器组成。
生成器可以生成与训练数据类似的图像,判别器可以判断一个图像是真实还是合成的。
通过训练生成器和判别器,GAN可以生成高质量、逼真的图像。
利用Matlab进行图像处理与图像识别的实例引言:在现代科技的发展中,图像处理和图像识别成为了热门的研究领域。
利用计算机视觉技术对图像进行处理和分析,可以广泛应用于医学影像、安防监控、人脸识别等领域。
而Matlab作为一款功能强大的科学计算软件,提供了丰富的图像处理和识别工具箱,极大地便利了研究者在图像领域的工作。
本文将通过几个实例来介绍如何利用Matlab进行图像处理和图像识别。
一、Matlab中的图像处理工具箱Matlab提供了大量的图像处理函数和工具箱,方便用户进行图像的处理和分析。
其中,图像处理工具箱是最常用的一部分。
通过该工具箱,用户可以对图像进行滤波、增强、分割等操作。
例如,可以用imfilter函数进行均值滤波,用imadjust函数对图像进行直方图均衡化。
图像处理工具箱的使用非常简单,只需要调用相应的函数并传入参数即可。
二、实例1:图像滤波图像滤波是图像处理中常用的操作之一。
通过滤波可以去除图像中的噪声或者增强图像的细节。
在Matlab中,可以使用不同的滤波函数来实现不同的效果。
下面以均值滤波和中值滤波为例来介绍。
1. 均值滤波均值滤波是一种简单的线性滤波方法。
在Matlab中,可以使用imfilter函数来进行均值滤波。
例如,对一张灰度图像进行均值滤波的代码如下:```img = imread('image.jpg');h = fspecial('average', [3 3]);filtered_img = imfilter(img, h, 'replicate');```上述代码中,imread函数用于读取图像,fspecial函数用于创建一个3x3的均值滤波模板,imfilter函数用于对图像进行滤波操作。
'replicate'参数表示在边界处使用边界像素值进行补充。
2. 中值滤波中值滤波是一种非线性滤波方法,常用于去除椒盐噪声。
深度学习诞生前,实现图像中目标检测任务主要依赖于人工设计局部特征描述子,概括性强、抽象表达概括全局信息从而区分图像的不同区域,经典算法有HOG[1](Histogram of Oriented Gradient)、SIFT[2](Scale-Invariant Feature Transform)及LBP[3](Local Binary Patterns)等,但局部特征描述符的设计需要极强的领域专业知识且耗费人力。
在深度学习的发展之下,借用深层次卷积神经网络可以从图像中学习具有不同层次的特征表示方法,如何设计具有更好局部特征描述子的问题转化为如何设计轻量网络结构和简化训练过程,以实现精细任务。
在计算机视觉的飞速发展之下,细化分类的计算机视觉技术可以分为分类、目标检测、语义分割、实例分割多个类别[4]。
分类指的是预测目标图像中对象类别,目标检测在由粗至细的过程中不仅确定图像中目标的类别,同时以边界框或者图中心的形式标明目标所在图像中具体位置。
语义分割在此基础上对目标每个像素点标签预测,使每个像素按照其所在区域或对象分类标记,得到更精细分割结果。
实例分割的概念最早由Hariharan等人[5]提出,旨在对同类对象组不同个体提供不同标签,整个过程中相同含义像素被赋予相同标签,基于深度学习的实例分割研究进展李晓筱1,胡晓光2,王梓强1,杜卓群11.中国人民公安大学信息网络安全学院,北京1000382.中国人民公安大学侦查学院,北京100038摘要:目标检测确定检测图像中目标对象所在区域及其类别,语义分割对检测图像实现像素级分类,实例分割可以定义为同时解决目标检测与语义分割问题,在分类的同时确定每个目标实例语义。
实例分割网络在无人机驾驶、机器人抓取、工业筛检等领域具有重要应用意义,针对目前基于深度学习实例分割综述性文章的空白,对实例分割进展进行概述,按照单阶段实例分割与双阶段实例分割的分类对不同网络模型进行论述,重点介绍近两年网络框架的发展,总结各网络特点的同时提出未来发展方向。
yolov8 实例分割onnx推理概述及解释说明1. 引言1.1 概述本文旨在探讨YOLOv8实例分割模型在ONNX推理过程中的应用。
首先介绍YOLOv8实例分割模型和ONNX的基本概念,然后探讨它们之间的关联性。
接下来,将详细说明如何将YOLOv8模型转换为ONNX格式,并解释YOLOv8实例分割在ONNX推理过程中的具体步骤和方法。
最后,进行结果后处理与可视化方法的探讨。
1.2 文章结构本文主要分为五个部分:引言、YOLOv8实例分割、ONNX推理、YOLOv8实例分割onnx推理过程解释以及结论与展望。
首先,在引言部分我们会做一个整体的概述,明确文章的目标和内容,并简要介绍各个部分的内容安排。
接下来,在第二部分我们会从YOLOv8和实例分割两个方面展开,介绍它们的基本概念以及关联性。
第三部分会对ONNX做简单介绍,并阐述其优势和应用场景,同时详细说明如何将YOLOv8模型转换为ONNX格式。
第四部分将着重解释YOLOv8实例分割在ONNX推理过程中的具体步骤和方法,包括数据预处理、模型加载与推理过程以及结果后处理与可视化方法探讨。
最后,在结论与展望部分,我们将对全文进行总结,并展望未来在YOLOv8实例分割和ONNX推理领域的研究方向。
1.3 目的本文的目的是帮助读者了解并掌握YOLOv8实例分割模型在ONNX推理过程中的应用。
通过对YOLOv8的介绍,读者可以了解其在目标检测和图像分割中的优势。
同时,通过对ONNX的介绍,读者可以了解其在深度学习模型转换和跨平台推理上的重要作用。
本文还将详细说明YOLOv8模型转换为ONNX格式的步骤与方法,并阐述YOLOv8实例分割在ONNX推理过程中的具体步骤和方法,帮助读者更好地应用该技术。
最后,本文还会展望未来在YOLOv8实例分割和ONNX推理领域可能产生的新研究方向,以期激发读者对该领域进一步探索与研究。
2. YOLOv8实例分割:2.1 YOLOv8简介:YOLOv8是一种基于深度学习的目标检测算法,它在YOLO系列的基础上进行了改进和优化。
AI技术中的图像识别技巧分享 一、引言 在如今数字化时代中,人工智能(Artificial Intelligence, AI)技术迅速发展,尤其是图像识别技术成为了热门领域之一。基于深度学习的图像识别技巧在各个领域都有广泛的应用,例如医学影像分析、自动驾驶、安防监控等。本文将分享一些常见的优秀图像识别技巧,帮助读者更好地理解和应用AI技术中的图像识别。
二、卷积神经网络(Convolutional Neural Network, CNN) 卷积神经网络是近年来最受欢迎和成功的深度学习算法之一。它模拟了人脑视觉系统中的处理机制,并通过多层卷积和池化操作来提取特征。以下是几个值得分享的CNN技巧:
1. 数据增强:通过对训练数据进行旋转、平移、缩放等变换,可以扩充数据集并增加模型的鲁棒性。
2. 预训练模型:使用在大规模数据上预训练好的模型作为初始参数,可以显著提高训练效果并加快收敛速度。
3. 修剪网络结构:对于较大的网络模型,可以通过删除一些冗余层和参数来提高运行效率,同时保持较好的性能。
4. 批量归一化:在每个批次的数据中进行归一化操作,有助于提高模型的稳定性和泛化能力。
三、目标检测与物体识别技巧 除了图像分类,人们对目标检测和物体识别也有很高的需求。以下是几个在这方面实用的技巧: 1. 区域提议(Region Proposal)算法:在整幅图像中找到可能包含目标物体的候选框,然后再对这些候选框进行分类。
2. 多尺度特征融合:通过使用不同大小的感受野来捕捉目标在不同尺度下的特征信息,以便更好地进行检测和识别。
3. 单阶段检测器:传统目标检测方法需要两个阶段(先生成候选框再分类),而单阶段检测器可以直接预测类别和边界框信息,减少了计算开销并提高了速度。
4. 弱监督学习:当样本只有图像级别标签时(即知道图像里是否有某类物体但不知道具体位置),可以通过弱监督学习的方法来进行目标检测和物体识别。
基于卷积神经网络的图像分类算法研究与优化随着人工智能技术的不断发展,图像分类算法已经成为了计算机视觉中的一个重要问题。
其中,基于卷积神经网络(Convolutional Neural Networks,简称CNN)的图像分类算法已经被广泛应用于图像检索、图像超分辨率、图像识别等领域,受到了越来越多的关注。
一、卷积神经网络简介卷积神经网络是一种深度学习算法,主要包括卷积层、池化层、全连接层等模块。
卷积层主要负责提取特征,池化层主要负责降低特征图的维度,全连接层主要负责实现分类。
二、图像分类算法的应用图像分类算法可以应用于很多领域,例如人脸识别、车牌识别、国旗识别等。
在这些应用场景中,不同的图像分类算法的表现往往不同,需要我们根据具体的需求和问题来选择相应的算法。
三、如何进行图像分类图像分类的过程一般可以分为以下几个步骤:1、数据预处理。
将图像进行尺寸缩放、灰度化、归一化等处理。
2、特征提取。
使用卷积神经网络提取图像的特征向量。
3、特征选择。
根据不同的应用场景,选取合适的特征。
4、分类器构建。
使用分类算法对特征向量进行分类。
四、如何优化图像分类算法对于卷积神经网络中的图像分类算法,我们可以从以下几个方面进行优化:1、模型的选择。
不同的应用场景对模型的要求不同,我们需要根据具体的需求来选择不同的卷积神经网络模型。
2、超参数调整。
对于卷积神经网络模型,我们需要调整网络的超参数来优化分类性能,例如学习率、批大小、网络深度等。
3、数据增强。
使用数据增强技术可以提升模型的泛化能力,例如旋转、平移、随机裁剪等。
4、迁移学习。
在一些场景下,我们可以使用迁移学习来将预训练好的模型参数应用于当前的任务中,从而提升分类性能。
五、结语在本文中,我们对基于卷积神经网络的图像分类算法进行了简单的介绍,并探讨了如何对图像分类算法进行优化。
当然,图像分类算法的研究还有很多可发掘的领域,例如在多任务学习、半监督学习等方面的应用。
我们相信,在不断的探索和研究之中,这一领域的发展前景将会更加明朗。
利用AI技术进行图像识别与处理的方法与技巧一、引言从人类历史的角度来看,图像识别与处理一直是一个重要的课题。
随着人工智能(AI)技术的迅速发展,图像识别与处理的方法和技巧也得到了长足的进步。
本文将介绍在利用AI技术进行图像识别与处理时常用的方法与技巧。
二、图像预处理在进行图像识别与处理之前,通常需要对原始图像进行预处理。
这包括去除噪声、调整对比度和亮度等操作,以确保图像质量更好、特征更明显。
以下是几种常用的图像预处理方法:1. 去噪声:噪声是指由于光线或传感器等原因造成的图像中不想要的杂乱信息。
可以使用滤波器或降噪算法来减少噪声水平,并提高后续处理步骤中的准确性。
2. 对比度增强:通过调整图像对比度可以增强不同物体之间的差异,使得它们更容易被分辨出来。
通常可以使用直方图均衡化或拉伸变换等方法来实现对比度增强。
3. 亮度调整:若原始图像偏暗或偏亮,可以通过调整亮度来使图像更加清晰。
这可以通过线性或非线性变换来实现。
三、特征提取特征提取是图像识别与处理的核心步骤之一。
通过提取图像中的关键特征,可以对不同物体进行分类和识别。
以下列举了几种常用的特征提取方法:1. 边缘检测:边缘是图像中强度变化明显的地方,通常标志着物体的轮廓。
常用的边缘检测算法包括Canny算子和Sobel算子等。
2. 兴趣点检测:兴趣点是独特而重要的图像区域,能够帮助识别物体。
SIFT 和SURF等算法可用于在图像中寻找兴趣点。
3. 文本检测:对于包含文本信息的图像,文本检测可以确定文字所在位置并将其从背景中分离出来。
方法包括基于连通组件的方法和基于深度学习的方法等。
四、深度学习技术近年来,随着深度学习技术(如卷积神经网络)的兴起,在图像识别与处理领域取得了巨大突破。
以下是几种基于深度学习技术的图像处理方法:1. 目标检测:通过深度学习模型,可以实现对图像中不同目标的准确检测和定位。
常用的目标检测算法包括Faster R-CNN、YOLO和SSD等。
实例分割掩膜转yolo格式-概述说明以及解释1.引言1.1 概述实例分割是计算机视觉领域中的一项重要任务,它的目标是将图像中的每个像素标注为属于哪个物体类别,同时为每个实例生成一个二进制掩膜。
这个任务对于图像理解、场景理解和自动驾驶等领域具有重要意义。
掩膜是一种表示对象形状和位置的重要工具,它可以帮助我们更好地理解图像中的物体。
而转化为yolo格式,则可以为目标检测任务提供更加简洁的标注结果。
本文将介绍实例分割和掩膜转yolo格式的原理和方法。
首先,我们将详细介绍实例分割的基本概念和方法,包括使用深度学习模型进行像素级分类和预测掩膜的技术。
接着,我们将探讨如何将生成的掩膜转化为yolo 格式,以便进行目标检测和识别。
通过本文的阅读,读者将能够了解实例分割和掩膜转yolo格式的原理和实践方法,并将其应用于自己的项目中。
希望本文能够帮助读者更好地理解实例分割和目标检测技术,为计算机视觉领域的研究和应用提供一些思路和启发。
文章结构是指文章的整体组织架构和内容布局。
一个清晰的文章结构能够使读者更好地理解文章的逻辑脉络和主要内容。
本文将按照以下结构进行组织:1. 引言1.1 概述在本部分,将介绍实例分割技术和转换到yolo格式的背景和基本概念。
1.2 文章结构本部分将详细介绍文章整体的组织结构和内容安排,以便读者更好地理解和跟进后续的内容。
1.3 目的在本部分,将明确本篇文章的研究目的和意义,以及所要解决的问题。
2. 正文2.1 实例分割在本部分,将系统介绍实例分割的基本原理、常用方法和现有研究成果,以及实例分割在计算机视觉中的应用场景和挑战。
2.2 掩膜转yolo格式在本部分,将详细介绍将实例分割掩膜数据转换到yolo格式的方法和步骤,包括数据预处理、标注格式转换和模型训练等关键环节。
3. 结论3.1 总结在本部分,将对实例分割掩膜转yolo格式的研究进行总结和梳理,总结研究成果和创新点,总结研究中遇到的问题和挑战。
Yolov8实例分割推理后处理逻辑一、Yolov8的基本原理Yolov8是一种基于深度学习的目标检测算法,它凭借其高效的推理速度和较高的准确率在计算机视觉领域受到广泛关注。
Yolov8使用基于卷积神经网络的模型,在图像中检测出目标的位置和类别,并输出对应的边界框和类别标签信息。
相比于传统的目标检测算法,Yolov8具有更快的推理速度和更高的准确率,因此在诸多场景下得到了广泛应用。
二、Yolov8实例分割推理的流程1. 输入图像预处理Yolov8算法首先需要对输入的图像进行预处理,包括图像的格式转换、尺寸缩放、像素归一化等操作,以便于送入模型进行推理。
2. 模型推理经过预处理的图像被送入Yolov8模型进行推理,模型将对图像中的目标进行检测,并输出对应的边界框和类别标签信息。
Yolov8的推理速度较快,可以在很短的时间内完成对目标的检测。
3. 后处理逻辑经过模型推理得到目标的边界框和类别信息后,需要进行后处理逻辑的处理,包括非极大抑制(NMS)、边界框解码等操作。
三、Yolov8实例分割推理后处理逻辑1. 非极大抑制(NMS)非极大抑制是一种常用的目标检测后处理方法,其主要目的是消除重叠的边界框,保留置信度最高的边界框。
在Yolov8的实例分割推理过程中,NMS可以通过设置合适的阈值来筛选出置信度较高的目标边界框,提高检测结果的准确度。
2. 边界框解码Yolov8输出的边界框信息通常是相对于输入图像的坐标,因此在实际应用中需要将边界框信息解码为绝对坐标,以便于后续的目标定位和分割。
3. 类别标签映射Yolov8输出的类别标签信息通常是对应类别的概率值,需要将概率值映射到对应的实际类别标签上,以便于理解检测结果。
4. 实例分割实例分割是指在目标检测的基础上,进一步对目标的轮廓进行分割,以得到更精细的目标分割结果。
在Yolov8实例分割推理的后处理逻辑中,实例分割通常需要借助语义分割模型或者分割算法来完成。
一、yolov5 实例分割onnx推理yolov5 实例分割onnx推理,是指利用yolov5模型来进行实例分割,并将其转换为onnx格式,以进行推理。
yolov5是一种基于PyTorch 的目标检测算法,可以用于实例分割任务,而将其转换为onnx格式,则可以在不同评台上进行推理,具有良好的跨评台性能。
在开始探讨yolov5 实例分割onnx推理的过程前,让我们先来了解一下yolov5的基本原理和实例分割的概念。
yolov5是一种单阶段目标检测算法,相比传统的双阶段算法(如Faster R-CNN、Mask R-CNN等),yolov5具有更快的推理速度和较高的准确性。
其核心思想是将目标检测任务转化为回归问题,通过预测边界框的中心坐标、宽高和目标类别,来实现目标的定位和分类。
而实例分割是指在目标检测的基础上,还需要对每个检测到的目标进行像素级别的分割,以实现对目标实例的精确定位。
在yolov5中,实例分割可以通过后处理的方式来实现,将目标的边界框进行细化,得到更加精确的目标分割结果。
将yolov5模型转换为onnx格式,则可以使其在不同的端侧设备上进行推理,具有更好的灵活性和通用性。
onnx是一种开放的神经网络交换格式,可以跨不同的神经网络框架(如PyTorch、TensorFlow、Caffe等)进行模型转换和推理,使模型在各种硬件评台上都具有良好的性能。
二、探索yolov5 实例分割onnx推理的过程1. 获取yolov5模型我们需要获取yolov5的预训练模型,可以从开源的yolov5仓库中下载相应的权重文件,也可以根据具体的任务需求,对yolov5模型进行微调。
2. 转换为onnx格式使用PyTorch提供的工具,可以将yolov5模型转换为onnx格式,以便后续在不同的评台上进行推理。
在转换过程中,需要注意模型的输入输出格式,以及对应的权重和偏置参数。
3. 推理测试将转换得到的onnx模型部署到目标评台上,可以通过输入测试数据,来进行推理测试。