测距综述
- 格式:doc
- 大小:49.50 KB
- 文档页数:6
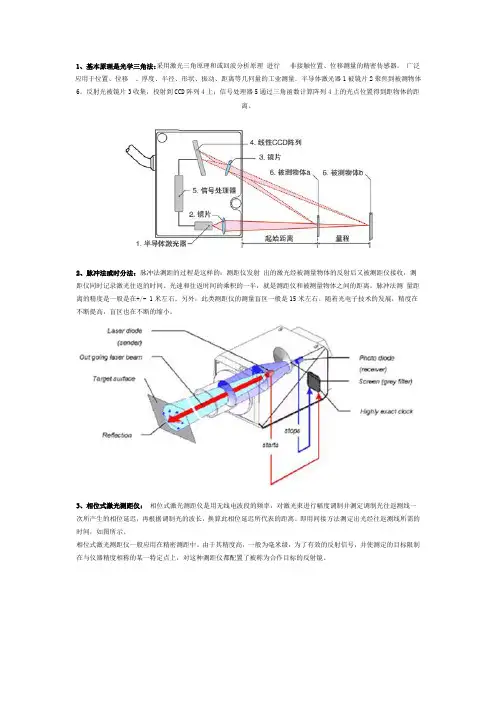
1、基本原理是光学三角法:采用激光三角原理和或回波分析原理进行非接触位置、位移测量的精密传感器。
广泛应用于位置、位移、厚度、半径、形状、振动、距离等几何量的工业测量。
半导体激光器1被镜片2聚焦到被测物体6。
反射光被镜片3收集,投射到CCD阵列4上;信号处理器5通过三角函数计算阵列4上的光点位置得到距物体的距
离。
2、脉冲法或时分法:脉冲法测距的过程是这样的:测距仪发射出的激光经被测量物体的反射后又被测距仪接收,测距仪同时记录激光往返的时间。
光速和往返时间的乘积的一半,就是测距仪和被测量物体之间的距离。
脉冲法测量距离的精度是一般是在+/- 1米左右。
另外,此类测距仪的测量盲区一般是15米左右。
随着光电子技术的发展,精度在不断提高,盲区也在不断的缩小。
3、相位式激光测距仪:相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。
即用间接方法测定出光经往返测线所需的时间,如图所示。
相位式激光测距仪一般应用在精密测距中。
由于其精度高,一般为毫米级,为了有效的反射信号,并使测定的目标限制在与仪器精度相称的某一特定点上,对这种测距仪都配置了被称为合作目标的反射镜。
【关闭窗口】。
其中为传感器到被测物体的距离为取决于被测物体表面特性的参限制。
和尸在 , , 。
〕机器人臂上安装了许多光‘ 数 , 可通过实验确定 , 。
强法测距传感器借助于传感器信息进行运动规划完成了绕过℃形障碍物的实验值得一提的是发光元件和接收元件可以采用光纤来传播光强信号。
” 。
巨’ 将单独驱动的三手指手爪 , , 如图所示 , 。
指尖上安装了多个利用光纤构成的光强法测距传感器构成了一个自动抓握系统利 , 这样的传感器可以安装在狭窄的地方如指尖部位实现 , 用传感器信息能够感觉手指与被抓物体的 , 由于光强法测距传感器结构简单易于因而在机器人中应用较多但它受被 , , 接近情况从而调整手指移动完成抓取鸡 , , 蛋等物体的操作。
测物体表面特性的影响较大应用场合受到相位法图相移法检侧距离图表面倾针角度的浏全布令相移检测卜一一一入一一一月曰卜图利用渡越时间引起的相移来浏圣距离一这类传感器通过检测发光元件发出的调制光信号与接收元件接收到的光信号之间的相移来获取距离信号根据引起相位变。
制光波长及相移如图图中距离一、所示。
可由下式求出化的方式不同 , 又可以区分为以下两种立兀 , ・‘ 入一’ 二双 , ・于由几何尺寸和调制光源而引起的相移。
式中为相移。
为光速入和为调制光的波长和频率如图所示两个发光元件分别用如下 , 光学三角法光学三角法的测量原理如图信号来驱动一一・所示发。
田田光元件所发出的光束照射在被测物体表面上并被反射部分反射光成像在位置敏感元 , ・这时点的光强为件。
、或光电晶体管阵列表面上 , 。
, 一其中・ , 十子苍… ” 〕。
, 通过检测光点在敏感表面上的位置由几何关系即可计算出被测物体的距离 , , , 采用光学三角法检测距离物体表面因是与被测物体表面有关的系数素如表面的反射特性表面倾斜等因素对测量结果影响较小同时它对接收到的光强 , 在下述三个假设条件下被测物体表面为完全漫发射光源所发射光强不随角度而改变大小不敏感光学三角法测距传感器随着测量距离的增加分辨率变差这也是三角法 , , 。

测距测速测角定义测距测速测角是一种常见的测量方法,广泛应用于各个领域。
通过测量物体与参考点之间的距离、速度以及角度,可以得到准确的数据,用于科学研究、工程设计、导航定位等方面。
测距是指测量物体与参考点之间的距离。
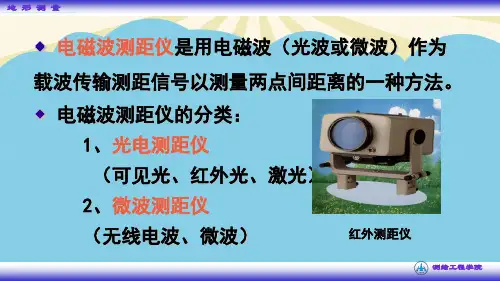
在现代测量技术中,常用的测距方法有几何测距法、电磁测距法和激光测距法等。
几何测距法是利用几何原理和测量仪器进行测量,如使用测距仪、测角仪等。
电磁测距法是利用电磁波的传播速度和测量仪器进行测量,如使用雷达、超声波测距仪等。
激光测距法是利用激光束的传播速度和测量仪器进行测量,如使用激光测距仪、激光测量仪等。
这些方法各有优劣,根据实际需求选择合适的方法进行测距。
测速是指测量物体的速度。
测速方法有多种,常见的有计时法、光电法和雷达测速法。
计时法是利用物体在一定时间内移动的距离来计算速度,如使用秒表、计步器等。
光电法是利用光电传感器测量物体通过传感器的时间来计算速度,如使用光电门、光电编码器等。
雷达测速法是利用雷达测量物体运动时的反射信号来计算速度,如使用汽车雷达、船舶雷达等。
根据不同的应用场景和需求,选择合适的测速方法可以获得准确的速度数据。
测角是指测量物体之间的角度。
在测量和导航中,测角是非常重要的一项技术。
测角方法有多种,常见的有光学测角法、电子测角法和卫星导航测角法。
光学测角法是利用光学仪器测量物体之间的角度,如使用测角仪、相机等。
电子测角法是利用电子仪器测量物体之间的角度,如使用陀螺仪、磁罗盘等。
卫星导航测角法是利用卫星信号进行导航和测量,如使用全球定位系统(GPS)等。
这些方法可以精确测量物体之间的角度,为科学研究、工程设计和导航定位提供准确的数据支持。
测距测速测角在各个领域都有广泛的应用。
在建筑工程中,测距测角可以用于测量建筑物的尺寸和角度,以保证施工的准确性和安全性。
在交通运输中,测距测速测角可以用于测量车辆的行驶距离、速度和转向角度,以提高交通管理和安全性。
在航空航天中,测距测速测角可以用于飞行器的导航和控制,以确保飞行器的安全和准确性。
文献综述电子信息工程超声波测距系统前言:人能听到的声音频率为20Hz~20kHz,即为可听声波,超出此频率范围的声音,即20Hz 以下的声音称为次声波,20kHz以上的声音称为超声波。
由于超声波具有较强的指向性,且在传播中能量消耗较慢,所以在介质中传播较远,因此超声波经常被用在距离的测量上,如物位测量仪和测距仪等都可以由超声波进行实现。
超声波在空气中的传播速度为340米/秒(因温度大小会有规律变化),因此,如果能测出超声波在空气中的传播时间,就能算出其传播的距离。
超声波测距是一种利用声波特性、电子计数、光电开关相结合来实现非接触式距离测量的方法,不受光线、被测对象颜色等的影响,相比较与其它仪器而言更为卫生,更耐潮湿、粉尘、高温、腐蚀气体等恶劣环境,并且具有维护简单、无污染、可靠性高、寿命长等特点,可应用于纸业、矿业、电厂、化工业、水处理厂、污水处理厂、农业用水、环保检测、食品(酒业、饮料业、添加剂、食用油、奶制品)、防汛、水文、明渠、空间定位、公路限高等行业中。
且可在不同环境中进行距离准确度在线标定,可直接用于水、酒、糖、饮料等液位控制,可进行差值设定,可直接显示各种液位罐的液位、料位高度等【12】。
主题:现在认为,超声波最先是从1876年F.Galton的气哨实验开始,这是人类首次产生高频声波。
在以后30年内,人们对超声波仍然了解的比较少,发展较为缓慢,没有重视对超声波的研究。
在第一次世界大战中,超声波的研究才慢慢的受到各国的重视。
这时期法国人Langevin使用了一种晶体传感器,并使其在水下接收一些相对低频率的超声波,并且提出是否可以使用超声波来对水中的潜艇进行检测或者在水下利用超声波进行通信【16】。
在1929年,前苏联科学家Sokolov最先提出了利用超声波探进行检查金属物内部是否存在缺陷的想法【17】。
在间隔两年后,德国人Mulhauser获准一项关于超声检测方法的德国专利,但是他却没有在这方面进行深入的探索研究。
基于温度补偿的超声波测距系统的设计文献综述1. 课题的提出现代的社会计算机技术、自动化技术和工业机器人不断发展,测距方式因场合的不同,要求精度的不同正发生巨大的变化]1[。
例如在自动化装配、检测、分类、加工与运输等过程中,要对随意放置的工件进行作业,这就必须对工件的位置、形状、姿势、种类自动地进行判别,尤其在在工件运输过程中进行识别,则问题更为复杂与困难。
目前,非接触式测距仪常采用超声波、激光和雷达。
但激光和雷达测距仪造价偏高,不利于广泛的普及应用,在某些应用领域有其局限性。
超声波测距仪造价相对较低,在一定场合可以替代激光仪,节省成本,因此用途广泛。
超声波方法明显突出的优点:1.超声波的传播速度仅为光波的百万分之一,并且指向性强,能量消耗缓慢,因此可以直接测量较近目标的距离]2[;2.超声波对色彩、光照度不敏感,可适用于识别透明、半透明及漫反射差的物体 (如玻璃、抛光体);3.超声波对外界光线和电磁场不敏感,可用于黑暗、有灰尘或烟雾、电磁干扰强、有毒等恶劣环境中;4.超声波传感器结构简单、体积小、费用低、信息处理简单可靠,易于小型化与集成化,并且可以进行实时控制]3[;因此,超声波方法作为非接触检测和识别的手段,已越来越引起人们的重视。
在机器人避障、导航系统、机械加工自动化装配及检测、自动测距、无损检测、超声定位、汽车倒车、水库液位测量等方面已经有了广泛的应用]4[。
2.超声波测试仪概况及发展前景超声检测主要是利用超声波作为载体,即通过超声在媒质中的传播、散射、吸收、波形转换等,提取反映媒质本身特性或内部结构的信息,达到检测媒质性质、物体形状或几何尺寸、内部缺陷或结构的目的。
我国无损检测技术是从无到有,从低级阶段逐渐发展到应用普及的现阶段水平。
超声波检测仪器的研制生产,也大致按此规律发展变化。
五十年代,我国开始从国外引进超声波仪器,多是笨重的电子管式仪器。
如英国的UCT-2超声波检测仪,重达24Kg,各单位积极开展试验研究工作,在一些工程检测中取得了较好的效果。
距离测量总结距离是我们日常生活和工作中常常需要测量的一项量值,其重要性不言而喻。
无论是在建筑工程、交通运输、地理测量还是运动竞技等领域,准确测量和记录距离是一项至关重要的任务。
而在科学技术的不断发展中,我们也见证了距离测量技术的不断进步和创新。
本文将对距离测量的一些方法和仪器进行总结和介绍。
首先,我们来考虑传统的距离测量方法之一——直尺测量。
直尺是最简单、最常见的测量工具之一,通过直接拿取直尺的两端,我们可以快速地测量出两点之间的距离。
然而,直尺测量方法存在一些局限性。
首先,当需要测量的距离较长时,直尺可能无法满足需求。
其次,由于直尺的刻度有限,当需要高精度测量时,直尺测量方法并不理想。
随着科学技术的发展,激光测距仪逐渐成为测量距离的首选工具。
激光测距仪是一种利用激光束测量距离的仪器,它通过向目标物体发射激光,然后测量接收到反射光的时间来计算出距离。
激光测距仪具有测量精度高、测量速度快、操作简便等优点,已广泛应用于建筑工程、地理测量、水利工程等领域。
同时,激光测距仪也面临着一些挑战,如受到环境因素、被测物体表面特性等影响,需要针对不同的使用场景进行优化和改进。
另一种常见的距离测量方法是基于全球定位系统(GPS)的测量。
GPS是一种通过卫星导航系统实现位置定位和距离测量的技术。
GPS通过接收来自多颗卫星的信号,然后通过信号的传输时间差来计算接收器与卫星之间的距离。
GPS在交通运输、地理测量、导航等领域具有广泛的应用,然而对于一些特殊环境下的距离测量,如室内测量、峡谷地形等,GPS的精度和可靠性可能会受到一定程度的限制。
除了激光测距仪和GPS,还有一些其他常见的距离测量方法和仪器。
例如,超声波测距仪利用超声波的传播和回波时间来测量距离,广泛应用于水利工程、车辆安全等领域。
雷达测距仪则利用电磁波的传播和回波时间来测量距离,常用于航空、航海等领域。
此外,还有一些光学测距仪器和方法,如三角测距、测距仪等。
现代长度测量方法综述嘿,咱今儿就来聊聊这现代长度测量方法。
你说这长度测量,那可真是太重要啦!咱生活里到处都离不开它呀。
你想想看,盖房子得量尺寸吧,做衣服也得知道长短吧,连你平常走路,是不是也大概能估摸出个距离呀。
这长度测量就像是我们生活的小助手,默默地发挥着大作用呢。
先来说说这尺子吧,这可是最常见的长度测量工具啦。
小时候咱都用过直尺吧,那简单直接,一量就知道个大概。
可这现代社会呀,尺子的种类那可多了去了。
什么卷尺呀,能拉长缩短,方便得很呢,装修师傅们可喜欢用啦。
还有游标卡尺,那可就更精确了,能测量出特别细微的长度差别,就像能捕捉到长度的小秘密一样。
还有激光测距仪呢,这玩意儿可厉害啦!就好像它有一双神奇的眼睛,“唰”的一下就能把距离给测出来,又快又准。
你说这像不像孙悟空的火眼金睛呀,一下子就能看穿距离。
再讲讲全站仪,这可是工程测量里的大明星呀!它能同时测量角度和距离,那功能可强大了。
就好像是一个全能选手,啥都能搞定。
现在还有那种通过声波或者电磁波来测量长度的方法呢。
你说这科技是不是太神奇啦?就像变魔术一样,能把看不见摸不着的长度给准确地测量出来。
那这些现代长度测量方法和以前比起来,可真是进步太多啦。
以前可能就是拿根绳子比划比划,哪有现在这么精确和方便呀。
咱再想想,如果没有这些先进的长度测量方法,那会怎么样呢?盖的房子歪歪扭扭,做的衣服不合身,那可就乱套啦!所以说呀,这些测量方法可真是我们生活的保障呢。
总之呢,这现代长度测量方法可真是五花八门,各有各的厉害之处。
它们就像一群小卫士,守护着我们生活中的各种长度数据,让我们的生活变得更加有序和美好。
咱可得好好感谢这些聪明的发明和技术呀,让我们能这么轻松地知道各种长度呢!是不是呀?。
测距的主要方法和手段1. 引言测距是指确定物体间的距离的过程,是很多科学和工程领域中一项重要的任务。
测距在地理、测绘、建筑、导航、激光技术等领域都有广泛的应用。
本文将介绍测距的主要方法和手段。
2. 直接测距方法直接测距方法是指通过直接测量目标物体两点间的实际距离来获取距离信息。
直接测距方法的主要手段有:2.1 利用测距仪器通过使用测距仪器进行测量,可以准确地得到物体间的距离信息。
常见的测距仪器包括测距仪、测距仪表、测距仪器等。
这些仪器通常基于声波、激光、雷达等技术原理,通过发射波束并接收反射的波束来测量距离。
2.2 利用测绘技术测绘技术是一种重要的直接测距方法。
通过使用全站仪、经纬仪、水平仪等测绘仪器,可以进行测量角度、高程、水平距离等,从而计算出物体间的直线距离。
2.3 利用测绘仪器利用测绘仪器进行测距是一种常见的方法。
通过使用测距仪、测距仪表、测距仪器等测绘仪器,可以测量出物体间的实际距离。
测绘仪器通常通过激光、雷达等技术原理来实现测距。
3. 间接测距方法间接测距方法是指通过测量与距离相关的其它物理量,然后利用相关的数学模型或公式计算出距离。
间接测距方法的主要手段有:3.1 利用声音传播速度声音在空气中传播的速度是一个已知的常数,通过测量声音的传播时间,可以计算出物体与观测点间的距离。
这种方法常用于水下测距和地震勘探领域。
3.2 利用光的传播速度光在真空中传播的速度是一个已知的常数,通过测量光的传播时间,可以计算出物体与观测点间的距离。
这种方法常用于激光测距和雷达测距等领域。
3.3 利用测量信号的强度某些测量信号的强度与距离之间存在一定的关系。
通过测量信号在传播过程中的衰减情况,可以推算出物体与观测点间的距离。
这种方法常用于无线通信领域中的距离估计。
3.4 利用三角测量法三角测量法是一种常见的间接测距方法。
通过测量两条边和夹角,利用三角形的性质计算出物体间的距离。
这种方法常用于地理测量和航空测绘等领域。
信息记录材料2021年5月第22卷第5期〔综述•论著]调频连续波雷达测距算法综述史璐媛,任建,刘令文(沈阳工业大学辽宁沈阳110870)【摘要】为了解连续波雷达测距精度的影响因素,开展了两个主流算法与补偿算法的研究,提到了泰勒级数建模和人工神经网络算法的相关改进,展望了雷达与人工智能和交通领域等更集成化的发展趋势。
【关键词】连续波雷达测距;参差分频法;二次相差法;补偿算法【中图分类号】TN953.+2【文献标识码】A【文章编号】1009-5624(2021)05-0005-02Survey of Ranging Algorithms for FM CW RadarShi L u yuan,Ren J an f LiuLingwenShenyang University of T echnology Shenyang Liaoning110870,China[Abstract]In order to understand the influencing factors of continuous wave radar ranging accuracy,two mainstream algorithms and compensation algorithms are studied,and the related improvements of Thylor series modeling and artificial neural network algorithm are mentioned.The development trend of r adai;artificial intelligence and traffic field is prospected.【Key words]Continuous wave radar ranging;Staggered frequency division method;Quadratic phase difference method; Compensation algorithm1引言连续波作为雷达测距的信号具备高精度测距、结构简单轻便、测速性能好等优点,具有广泛的应用前景,成为研究人员关注的焦点。
超声波测距与激光测距 一、超声波测距: 超声测距技术在工业现场、车辆导航、水声工程等领域都具有广泛的应用价值,目前已应用于物位测量、机器人自动导航以及空气中与水下的目标探测、识别、定位等场合。因此,深入研究超声的测距理论和方法具有重要的实践意义。
原理: 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 。这就是所谓的时间差测距法。 超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。由此可见,超声波测距原理与雷达原理是一样的。 测距的公式表示为:L=C×T 式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半)。 超声波测距主要应用于倒车提醒、建筑工地、工业现场等的距离测量,虽然目前的测距量程上能达到百米,但测量的精度往往只能达到厘米数量级。 由于超声波易于定向发射、方向性好、强度易控制、与被测量物体不需要直接接触的优点,是作为液体高度测量的理想手段。在精密的液位测量中需要达到毫米级的测量精度,但是目前国内的超声波测距专用集成电路都是只有厘米级的测量精度。通过分析超声波测距误差产生的原因,提高测量时间差到微秒级,以及用LM92温度传感器进行声波传播速度的补偿后,我们设计的高精度超声波测距仪能达到毫米级的测量精度。 超声波测距误差分析: 根据超声波测距公式L=C×T,可知测距的误差是由超声波的传播速度误差和测量距离传播的时间误差引起的。 时间误差: 当要求测距误差小于1mm时,假设已知超声波速度C=344m/s (20℃室温),忽略声速的传播误差。测距误差s△t<(0.001/344) ≈0.000002907s 即2.907ms。 在超声波的传播速度是准确的前提下,测量距离的传播时间差值精度只要在达到微秒级,就能保证测距误差小于1mm的误差。使用的12MHz晶体作时钟基准的89C51单片机定时器能方便的计数到1μs的精度,因此系统采用89C51定时器能保证时间误差在1mm的测量范围内。 测量方法: 常见的超声波测距方法主要有脉冲回波法和相位差法两种。相位差法与脉冲回波法的不同体现在对回波的处理方式上,由超声换能器接收端获得调制声波的回波,经放大电路转换后,得到与放大的相位完全相同的电信号,此电信号放大后与光源的驱动电压相比较,测得两个正弦电压的相位差,根据所测相位差就可算得所测距离。由于采用的是相位比较,使得测距精确度大大提高,但这种方法本身存在明显的缺陷。由于相位测量存在以2n为周期的多值解,从而容易造成解的不确定性。为了消除多解,常常需要引入包络检测和采用发射多种不同频率波的方式减小不确定度,这就使得该方法的实现复杂化。 方案设计: 由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。利用超声波检测距离,设计比较方便,计算处理也较简单,并且在测量精度方面也能达到农业生产等自动化的使用要求。 超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。电气方式包括压电型、电动型等;机械方式有加尔统笛、液哨和气流旋笛等。它们所产生的超声波的频率、功率、和声波特性各不相同,因而用途也各不相同。目前在近距离测量方面常用的是压电式超声波换能器。根据设计要求并综合各方面因素,本文采用AT89C51单片机作为控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器。 超声波测距系统, 通过发射和接受超声波, 使用单片机计算距离, 并加入了温度补偿电路, 提高了距离计算的精度。该系统可满足大多数场合的测距要求。由于该系统中锁相环锁定需要一定时间。测得的距离有误差。在汽车雷达应用中此误差可忽略不计;但在精度要求较高的工业领域如机器人自动测距等方面。此误差不能忽略。只有通过改变一些硬件的应用实现对超声波的快速锁定。
本系统的特点是利用单片机控制超声波的发射和对超声波自发射至接收往返时间的计时,单片机选用8751,经济易用,且片内有4K的ROM,便于编程。电路原理图如图2所示。其中只画出前方测距电路的接线图,左侧和右侧测距电路与前方测距电路相同,故省略之。 40kHz 脉冲的产生与超声波发射 : 测距系统中的超声波传感器采用UCM40的压电陶瓷传感器,它的工作电压是40kHz的脉冲信号,这由单片机执行下面程序来产生: PUZEL: MOV 14H, #12H; 超声波发射持续200ms HERE: CPL P1.0 ; 输出40kHz方波 NOP ; NOP ; NOP ; DJNZ 14H,HERE; RET 前方测距电路的输入端接单片机P1.0端口,单片机执行上面的程序后,在P1.0 端口输出一个40kHz的脉冲信号,经过三极管T放大,驱动超声波发射头UCM40T,发出40kHz的脉冲超声波,且持续发射200ms。右侧和左侧测距电路的输入端分别接P1.1和P1.2端口,工作原理与前方测距电路相同。
二、脉冲激光测距: 原理: 1.1 数字法 在测量精度要求不高=的前提下,数字计数法是一种非常好的时间间隔测量方法。当时钟脉冲信号周期为T0,N为计数脉冲个数,待测脉冲上升沿与下一个时钟脉冲信号上升沿之间的时间间隔为T1、T2,则激光发射脉冲信号和激光接收脉冲信号的时间间隔Tx=NT0+T1-T2,然而,数字计数法得到的时间间隔Tx=NT0,故传统的数字法的测量误差△=T1一T2。 1.2 模拟法 在待测脉冲时间间隔 期间对电容进行充电,充电电流大小为I1,然后以一个小电流I2进行放电,I1和2的关系是I1=kI2,其中,k为放大倍数。根据充放电电荷相等的原理得放电时间Tx’=kTx,也就是将激光脉冲的飞行时间按一定比例进行延长。这种方法相对于数字法在理论上提高了测量精度,但仍然存在误差。并且由于在电容充放电过程中,电容受温度的影响非常大,故在实际应用中受到一定的限制。 1.3 插值法 数字计数法在测量精度要求不高的条件下无疑是一种非常好的时间测量方法,如果能够减小其误差,那么其时间测量精度将会得到很大的提高;模拟法虽然在一定程度上提高了测量的精度,但其测量范围受到限制。插值法很好地解决了上述问题。插值法是数字法和模拟法相结合的一种时间间隔测量方法。数字法的误差体现在T1,T2两个时间段,通过模拟法求得T1,T2的值。通过数据处理得到准确的时间间隔。 插值法主要对3段时间进行测量,即Ts,T1,T2,其中Ts=NT0,采用数字计数法得到,T1,T2的测量是关键。采用模拟法对T1,T2分别进行扩展,然后对扩展后的时间再次运用数字法测量。由于T1’=kT1,T1‘=N1T0,得T1=N1T0/k,同理得,T2=N2T0/k,则Tx=Ts+T1-T2=(N+(N1-N2)/k)T0,由上式可知,插值法虽然在计算T1和T2时仍存在误差,但是其相对误差减小,可以有效地提高测量系统的精度。 脉冲激光测距时间间隔测量系统 激光脉冲测距方法的原理是:通过测量接收到的激光回波脉冲与发射脉冲之间的时间间隔,计算出测距系统到测距目标的直线距离。即激光脉冲在待测距离上往返时间f,已知光速为c,可得待测目标距离S为S=(ct)/2,由上式可以看出,激光测距的关键技术是对时间的测量,本文应用插值法进行脉冲激光测距时间间隔的测量。 脉冲激光测距时间间隔测量系统由激光脉冲信号、时钟脉冲信号源、逻辑控制电路、计数器、精确补偿电路系统和单片机组成。当逻辑控制电路接收到发射激光脉冲信号后,逻辑控制电路使得计数器开始对时钟脉冲信号进行计数。当逻辑控制电路接收到回波激光脉冲信号后,计数器停止计数,并把计数结果送到单片机中。与此同时,精确补偿电路系统对待测脉冲上升沿与下一个时钟脉冲信号上升沿之间的时间间隔进行精确时间测量,并把结果送给单片机与计数器的数据求和,完成时间间隔的计算。 激光发射脉冲信号和激光接收脉冲信号分别作用于精确补偿电路系统,使时间比例放大电路对待测脉冲上升沿与下一个时钟脉冲信号上升沿之间的时间间隔进行精确的时间间隔测量。通过计数器分别将T ,Tz的时间间隔记录下来,送给单片计算机进行计数处理。精确补偿电路系统的精确度直接影响测距系统的精确度,该技术是测距系统的关键技术。
三、总结 超声波测距系统, 通过发射和接受超声波, 使用单片机计算距离, 并加入了温度补偿电路, 提高了距离计算的精度。该系统可满足大多数场合的测距要求,该系统测得的距离有误差,在汽车雷达应用中此误差可忽略不计,但在精度要求较高的工业领域如机器人自动测距等方面,此误差不能忽略,可通过改变一些硬件的应用实现对超声波的快速锁定。 激光测距是以激光器作为光源进行测距。根据激光工作的方式分为连续激光器和脉冲激光器。氦氖、氩离子、氪镉等气体激光器工作于连续输出状态,用于相位式激光测距;双异质砷化镓半导体激光器,用于红外测距;红宝石、钕玻璃等固体激光器,用于脉冲式激光测距。激光测距仪由于激光的单色性好、方向性强等特点,加上电子线路半导体化集成化,与光电测距仪相比,不仅可以日夜作业、而且能提高测距精度,显著减少重量和功耗,使测量到人造地球卫星、月球等远目标的距离变成现实。
参考文献 [1] 基于单片机的超声测距仪研究与开发,孔雅琼,国防科学技术大学; [2] 基于C8051F320单片机的超声波测距仪,张 芬 ,中国地质大学(武汉)机械与电子信息学院,仪表技术与传感器,09年12期; [3] 基于stc89单片机的超声波测距仪,李为民, 陕西师范大学学报; [4] 基于单片机的超声波测距仪,胡福云, 湖北工业大学,科技视野; [5] 基于单片机的超声测距系统,陈莹, 华中科技大学; [6] 适用于窄脉冲的跨导型峰值保持电路设计[J],刘华柏、王省书、陈卓,光学技术,2008年S1期; [7] 冲击脉冲型探地雷达等效采样方法的研究[J],屈义萍、刘四新、徐晓林,电子测量技术,2010年01期; [8] 核脉冲高速高精度峰值采样保持电路的研究[J],陈国杰、曹辉、谢嘉宁、曾亚光,核电子学与探测技术,2007年06期;